Embed Size (px)
Citation preview

Union Robotics Systems and Automation Laboratory
Motion Planning in the Real World
Brendan BurnsUnion College

Union Robotics Systems and Automation Laboratory
Motion Planning
Many degrees of freedom Global planning Sampling-based planning
“Always on” system Responsive to user requests Productive use of “down” time

Union Robotics Systems and Automation Laboratory
Real World
No model of the environment Knowledge from sensors Dynamic obstacles
Implications: Uncertainty Sensor feedback

Union Robotics Systems and Automation Laboratory
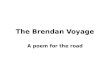
Sense-Plan-Act Loop
Utility-GuidedPlanning Robot
Sensing
?
MovementRequest
Sensor-DirectedRequest

Union Robotics Systems and Automation Laboratory
Sensing

Union Robotics Systems and Automation Laboratory
Sensing : Voxel Space

Union Robotics Systems and Automation Laboratory
Sensing: Occlusion

Union Robotics Systems and Automation Laboratory
Sensing: Uncertainty

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Utility-Guided Planning for Uncertain Environments
Modified PRM Planning Defer roadmap construction Search using A*
Use planning to guide sensing Act when certainty is above threshold

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Planning perceptions

Union Robotics Systems and Automation Laboratory
Example

Union Robotics Systems and Automation Laboratory
Open Questions/Challenges
Integrate sensing while moving Sensor fusion Assess sensor uncertainty Evaluate performance








![SED495 - Brendan Burns › wp-content › uploads › ...SED 495 Transcript [0:04:42.8] JM: Brendan Burns is a founder of the Kubernetes project and a distinguished engineer at Microsoft](https://img.pdfslide.us/doc/110x75/5f0f33f17e708231d442ff00/sed495-brendan-burns-a-wp-content-a-uploads-a-sed-495-transcript-004428.jpg)






![Anthology Comic [Brendan]](https://img.pdfslide.us/doc/110x75/577cd47f1a28ab9e78989f16/anthology-comic-brendan.jpg)