Embed Size (px)
Citation preview

Unified Gas-kinetic Scheme for the Study ofNon-equilibrium Flows
by
WANG, Ruijie
A Thesis Submitted to
The Hong Kong University of Science and Technology
in Partial Fulfillment of the Requirements for
the Degree of Doctor of Philosophy
in Nano Science and Technology Program
August 2015, Hong Kong

Authorization
I hereby declare that I am the sole author of the thesis.
I authorize the Hong Kong University of Science and Technology to lend this thesis
to other institutions or individuals for the purpose of scholarly research.
I further authorize the Hong Kong University of Science and Technology to reproduce
the thesis by photocopying or by other means, in total or in part, at the request of other
institutions or individuals for the purpose of scholarly research.
WANG, Ruijie
25 August 2015
ii

Unified Gas-kinetic Scheme for the Study ofNon-equilibrium Flows
by
WANG, Ruijie
This is to certify that I have examined the above PhD thesis
and have found that it is complete and satisfactory in all respects,
and that any and all revisions required by
the thesis examination committee have been made.
Prof. Kun Xu, Supervisor
Prof. Zikang Tang, Director of Program
Nano Science and Technology Program
25 August 2015
iii

Acknowledgment
Firstly, I would like to express my sincere gratitude to my supervisor Prof. Kun Xu
for his patience, encouragement, and immense knowledge during the study. His deep
understanding on the research field, innovative ideas, passions in science, and advices
exceptionally inspire and enrich me in all the time of the research. I am very glad to
have Prof. Kun Xu as my supervisor for my PhD study.
I gratefully acknowledge Prof. Xiao-Ping Wang, Prof. Tie-Zheng Qian, Prof. Yi-
Kuen Lee, and Prof. Yang Liu for their kindness and readiness to serve on my thesis
examination committee.
I do appreciate the fruitful discussions, all the support, kindly suggestions, and warm
encouragement given to me by Prof. Tie-Zheng Qian, Prof. Zhao-Li Guo, Prof. Quan-
Hua Sun, Prof. Graeme Bird, and Dr. Xin-Peng Xu during the period of my postgrad-
uate study.
I wish to express my gratitude to my fellow students and friends for their helpful
discussions on the research and accompany during the study: Dr. Song-Ze Chen, Dr.
Xiao-Dong Ren, Dr. Li-Jun Xuan, Dr. Jun Luo, Dr. Pu-Bing Yu, Liang Pan, Chang
Liu, Dr. Sha Liu, Wan-Yang Wang, Dr. Xin-Peng Xu, Jiao-Long Zhang, Yin-Wang,
Dr. Tao Lin, Zuo-Gong Yue, Dr. Zong-Long Zhu, Xiao-Ming Liu and many others. I
would like to thank the Nano Science and Technology program and the Department of
Mathematics for providing me the opportunity and postgraduate studentship to study
here, and the research travel grant for providing me the award to attend academic
conference.
I also wish to express my deep gratitude to my family and my boyfriend for their
love, deep caring, continual support, encouragement and understanding during my
study.
iv

Table of Contents
Title Page . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
Authorization Page. . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Signature Page. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Table of Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
Abstract. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
Chapter 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Review of Modeling and Simulation for Gas Flows . . . . . . . . . . . . 2
1.3 Objectives and Organization of the Thesis . . . . . . . . . . . . . . . . . . 7
Chapter 2 Numerical Modeling of Single-component Gas . . . . . . . . . . 8
2.1 Boltzmann Equation and Its Model Equations . . . . . . . . . . . . . . . 8
v

2.2 Unified Gas-kinetic Scheme . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Discretization of Velocity Space . . . . . . . . . . . . . . . . . . . 13
2.2.2 Polyatomic Gas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.3 Reduced Distribution Functions . . . . . . . . . . . . . . . . . . . 15
2.2.4 Calculate Interface Flux . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.5 Update Cell-averaged Flow Variables . . . . . . . . . . . . . . . . 20
2.2.6 Boundary Conditions . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.7 Numerical Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Discrete Unified Gas-kinetic Scheme for Compressible Flow . . . . . . . 26
2.3.1 Properties of the UGKS and DUGKS Schemes . . . . . . . . . . . 28
2.3.2 Numerical Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Chapter 3 Numerical Modeling of Multi-component Gas . . . . . . . . . . 41
3.1 Boltzmann Equation and Its Model Equations . . . . . . . . . . . . . . . 41
3.2 Unified Gas-kinetic Scheme . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Numerical Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3.1 Shock Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3.2 Micro-channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
vi

Chapter 4 Sound-wave Propagation in Monatomic Gas . . . . . . . . . . . 55
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.1 Boundary Condition at the Transducer . . . . . . . . . . . . . . . 56
4.2.2 Method for Determining Sound Parameters . . . . . . . . . . . . 57
4.3 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.3.1 Behavior at Low Frequencies . . . . . . . . . . . . . . . . . . . . . 61
4.3.2 Behavior at High Frequencies . . . . . . . . . . . . . . . . . . . . . 61
4.3.3 Phase Speed and Attenuation Coefficient . . . . . . . . . . . . . . 64
4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Chapter 5 Cross-coupling of Mass and Heat Transfer . . . . . . . . . . . . 70
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2 Mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.2.1 Micro-channel of Planner Surfaces . . . . . . . . . . . . . . . . . . 71
5.2.2 Micro-channel of Ratchet Surfaces . . . . . . . . . . . . . . . . . . 73
5.3 Methodology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.3.1 Normalization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.3.2 Data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.4 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
vii

5.4.1 Cross-coupling for Planner Surfaces . . . . . . . . . . . . . . . . . 77
5.4.2 Cross-coupling for Ratchet Surfaces . . . . . . . . . . . . . . . . . 78
5.5 Knudsen pump . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Chapter 6 Conclusion and Future Work . . . . . . . . . . . . . . . . . . 85
6.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Appendix A Taylor Expansion of Maxwell Distribution . . . . . . . . . . . 97
Appendix B Moments of Maxwell Distribution . . . . . . . . . . . . . . . 99
viii

List of Figures
1.1 Classification of flow regimes based on Knudsen number. . . . . . . . . 3
2.1 Flow expansion to vacuum: schematic of the problem. . . . . . . . . . . 23
2.2 Flow expansion to vacuum: pressure contour at rarefaction parameter
δ = 100, 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Flow expansion to vacuum: pressure, temperature, and Mach number
along the centerline at rarefaction parameter δ = 10. . . . . . . . . . . . 25
2.4 Normalized coefficients of DUGKS and UGKS as a function of local
Knudsen number. Here Kn = τ/∆t. . . . . . . . . . . . . . . . . . . . . . 31
2.5 Sod shock tube: density, velocity, temperature, and heat flux at Kn = 10. 33
2.6 Sod shock tube: density, velocity, temperature, and heat flux at Kn =
10−3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.7 Sod shock tube: density, velocity, temperature, and heat flux at Kn =
10−5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.8 Shock structure: schematic of the problem. . . . . . . . . . . . . . . . . . 36
2.9 Shock structure: density, temperature, heat flux, and shear stress at
Ma1 = 3.0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.10 Shock structure: density, temperature, heat flux, and shear stress at
Ma1 = 8.0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
ix

2.11 Lid-driven cavity: schematic of the problem. . . . . . . . . . . . . . . . . 37
2.12 Lid-driven cavity: flow field at Kn = 0.1. . . . . . . . . . . . . . . . . . . 39
2.13 Lid-driven cavity: velocity profile under different mesh resolutions at
Kn = 0.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.1 Shock structure in binary gas mixture: number densities and temper-
atures for Ma1 = 1.5, mass ratio mB/mA = 0.5, and diameter ratio
dB/dA = 1 under diffrent component concentration χB1 . . . . . . . . . . 47
3.2 Shock structure in binary gas mixture: number densities and temper-
atures for Ma1 = 1.5, mass ratio mB/mA = 0.25, and diameter ratio
dB/dA = 1 under diffrent component concentration χB1 . . . . . . . . . . 48
3.3 Shock structure in binary gas mixture: number densities and temper-
atures for Ma1 = 3.0, mass ratio mB/mA = 0.5, and diameter ratio
dB/dA = 1 under diffrent component concentration χB1 . . . . . . . . . . 48
3.4 Micro-channel flow of binary gas mixture: schematic of the problem. . . 49
3.5 Micro-channel flow of binary gas mixture: particle fluxes due to pres-
sure gradient, temperature gradient, and concentration gradient vs Knud-
sen number for mass ratio mB/mA = 2. . . . . . . . . . . . . . . . . . . . 50
3.6 Micro-channel flow of binary gas mixture: particle fluxes due to pres-
sure gradient, temperature gradient, and concentration gradient vs Knud-
sen number for mass ratio mB/mA = 4. . . . . . . . . . . . . . . . . . . . 51
3.7 Micro-channel flow of binary gas mixture: particle fluxes due to pres-
sure gradient, temperature gradient, and concentration gradient vs Knud-
sen number for mass ratio mB/mA = 10. . . . . . . . . . . . . . . . . . . 52
4.1 Sound-wave propagation: schematic of the problem. . . . . . . . . . . . 56
x

4.2 Sound wave propagation: velocity change on every integer period at
the monitor point for frequency ω = 0.1. . . . . . . . . . . . . . . . . . . 61
4.3 Sound wave propagation: A(x) and B(x) for frequency ω = 0.1. . . . . 62
4.4 Sound wave propagation: comparision of velocity amplitude of UGKS
and the theoretical solutions of R13 at frequency ω = 0.1. . . . . . . . . 62
4.5 Sound wave propagation: comparison of UGKS and DSMC results us-
ing the same boundary condition at Re = γ/ω = 0.5 (ω ≈ 3.3). . . . . . 63
4.6 Sound wave propagation: A(x), B(x), and velocity amplitude at fre-
quency ω = 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.7 Sound wave propagation: location dependent phase speed for frequency
ω = 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.8 Sound wave propagation: phase speed comparison at different frequen-
cies among the results from UGKS, DSMC experimental measurements,
and the Navier-Stokes equations. . . . . . . . . . . . . . . . . . . . . . . 66
4.9 Sound wave propagation: attenuation coefficient comparison at differ-
ent frequencies among the results from UGKS, DSMC experimental
measurements, and the Navier-Stokes equations. . . . . . . . . . . . . . 66
4.10 Sound wave propagation: wave speed and attenuation coefficient com-
parison between UGKS and experimental data of Greenspan. . . . . . . 67
4.11 Sound wave propagation: wave speed and attenuation coefficient com-
parison between UGKS and experimental data of Meyer. . . . . . . . . 68
5.1 Cross coupling in channel of planner surfaces: schematic of the problem. 72
5.2 Cross coupling in channel of ratchet surfaces: schematic of the problem. 74
xi

5.3 Cross coupling in channel of planner surfaces: LMQ and LQM versus
Knudsen number. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.4 Cross coupling in channel of ratchet surfaces: schematic of the simula-
tion geometry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.5 Cross coupling in channel of ratchet surfaces: LMQ and LQM versus
Knudsen number. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.6 Cross coupling in channel of ratchet surfaces: formula fitted and simu-
lated LMQ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.7 Cross coupling in channel of ratchet surfaces: temperature contour and
streamlines of typical diffusive configuration and diffusive-specular con-
figuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.8 Cross coupling in channel of ratchet surfaces: LMQ as a function of
tan α. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.9 Cross coupling in channel of ratchet surfaces: LMQ as a function of
L/H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.10 Cross coupling in channel of ratchet surfaces: LMQ as a function of
H1/H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
xii

List of Tables
2.1 Flow expansion to vacuum: reduced mass flux at L/H = 1. . . . . . . . 24
2.2 Computational cost comparison of DUGKS and UGKS. . . . . . . . . . . 39
4.1 Sound wave propagation: frequencies and domain lengths. . . . . . . . 60
4.2 Sound wave propagation: wave speed and attenuation coefficient at
different frequencies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
xiii

Unified Gas-kinetic Scheme for the Study ofNon-equilibrium Flows
by WANG, Ruijie
Nano Science and Technology Program
The Hong Kong University of Science and Technology
Abstract
There is an increasing demand for multi-scale modeling and simulation of gas flows
in various engineering applications, such as the re-entry of space shuttle and heat
flow in micro devices. The unified gas-kinetic scheme (UGKS) is a newly developed
multi-scale method to study gas flows in all Knudsen regimes from the continuum
Navier-stokes solutions to the rarefied non-equilibrium transport. The main objective
of this thesis research is to further develop UGKS and apply it to the study of mul-
tiple scale transport problems. In this thesis, the UGKS and its simplified variation
— discrete unified gas-kinetic scheme (DUGKS) — are presented and several numer-
ical examples are provided to validate the schemes. UGKS is further constructed for
multi-component gas flow and is validated through the simulations of shock struc-
tures at different Mach numbers and micro-channel flows driven by small pressure,
temperature, and concentration gradients. Then UGKS is used to study the physics
of low-speed micro-flows which include the sound-wave propagation and the cross-
coupling phenomenon in micro-channel. In the study of sound-wave propagation,
the phase speed and attenuation coefficient are extracted from the simulation under a
wide range of Knudsen numbers from the continuum flow regime to the free molecu-
lar one. The comparison with the experiments shows good agreement in all Knudsen
regimes. And the cross-coupling of thermal-osmosis and mechano-caloric effect in
slightly non-equilibrium gas is simulated and analyzed for micro-channel with plan-
ner and ratchet surfaces. The variation of cross-coupling coefficient as a function of
Knudsen number is obtained. At the same time, preliminary optimization for this
kind of Knudsen pump is included.
xiv

Chapter 1
Introduction
1.1 Motivation
The theoretical research of continuum and rarefied gas dynamics has a long history.
The computational fluid dynamics (CFD) has been greatly developed and successfully
applied to many fields in the past decades, such as aerospace, astronautics, micro-
devices, cars, and other gas machineries. For a long time, the simulation methods of
continuum flow and rarefied flow are studied separately. But the demand of multi-
scale modeling and simulation is arising as a result of fast development of space
technologies and micro/nano technologies. The study of multiple scale transport
process is still a challenging topic in CFD.
In aero-astronautics, the vehicles in outer-space and near-space are either operating in
extremely low-density flows or transport between the rarefied and continuum flows.
Multi-scale simulation may be needed in both situations. The vehicle in outer-space
needs thrusters in the propulsion system to stabilize and control its attitude where the
density ratio of the gas inside and outside of the thrusters can be very large. In the
spacecraft re-entry passage, the vehicle experiences from the free molecular flow at
the edge of atmosphere to the continuum flow region near the ground. The vehicles
in near-space may also travel constantly between the low-density and high-density
flow regimes. Pure continuum or rarefied gas simulation method is not sufficient and
a multi-scale method is therefore preferred.
In micro/nano technologies, multi-scale simulation is typically needed in the analysis
or design of the micro-electro-mechanical-systems (MEMS). In the thin-film formation
1

and MEMS manufacture technologies, such as chemical vapor deposition (CVD), the
gas in the decomposition chamber may cover a wide range of rarefaction conditions
[1]. And in microfluidic filters, the gas in the filter channel is rarefied whereas the gas
outside of the channel is mostly considered as a continuum flow [2]. In micro-nozzles
and other vacuum systems, the gas at the entrance can be continuum and the gas at
the exit may become rarefied [3, 4].
1.2 Review of Modeling and Simulation for Gas Flows
Under usual circumstances, the flow behavior is a collective effect of particles and the
continuum hypothesis is adopted to derive mathematical models for gas flows, such
as the Euler equations for inviscid flow and the Navier-stokes equations for viscous
flow. The Navier-stokes equations describe the conservation laws of mass, momentum
and energy together with the constitutive relations for viscosity (Newton’s law) and
heat conduction (Fourier’s law), and are the fundamentals of the hydrodynamic the-
ory. They are widely studied physically and mathematically, and play an important
role in fluid dynamics study.
However, the continuum hypothesis breaks down in low-density or small-scale sys-
tems, and the flow behavior is clearly influenced or dominated by the individual
particle transport. A microscopic description of the gas is therefore needed and this
is the subject of kinetic theory.
Early works on the kinetic theory can be dated back to 1738, when D. Bernoulli ex-
plained the pressure of gas based on the process of particle transport and collision.
The important concept of mean free path — the average distance traveled by particles
between two successive collisions — was introduced by R. Clausius. J.C. Maxwell
introduced the velocity probability distribution function and derived its form in equi-
librium state, i.e. Maxwell distribution. Finally, the solid foundation of kinetic theory
was provided by the work of L. Boltzmann. He proposed the dynamic equation for
velocity probability distribution function under the effect of particle transport and
collision — the famous Boltzmann equation. He also introduced the H-theorem and
proved that the Maxwell distribution is the only equilibrium distribution for the Boltz-
mann equation [5].
2

0
Continuum regime
0.001
Slip regime
0.1
Transition regime
10
Free molecular regime
Kn
Figure 1.1: Classification of flow regimes based on Knudsen number.
Due to the complexity of the Boltzmann equation, researchers tried to simplify the
equation for theoretical analysis. One typical approach is the BGK model equation
proposed by P.L. Bhatnagar, E.P. Gross, and M. Krook [6]. In this model, the complex
collision term is replaced by a simple relaxation process of the distribution function
from an initial state to the Maxwell equilibrium distribution at the time scale of par-
ticle collision time. The original collision term is greatly simplified, whereas many
important characters of the Boltzmann equation is still preserved. However, the BGK
equation is still a non-linear equation. If the system is slightly disturbed and not far
from the equilibrium distribution, the Boltzmann equation or its model equations can
be linearized, which provides another popular approach for theoretical research [5, 7].
In the kinetic theory, the degree of rarefaction is usually characterized by the Knudsen
number, typically defined as the ratio of the particle mean free path to the character-
istic length,
Kn = λ/L. (1.1)
S. Chapman and D. Enskog expanded the distribution function into a power series of
the Knudsen number, recovered the Euler equations as zero-order approximation and
the Navier-stokes as first-order approximation of the Boltzmann equation, as well as
the formula for transport coefficients [8]. The Chapman-Enskog expansion provides
a powerful tool to analyze the kinetic equations in continuum limit.
The gas flows can be roughly classified into different flow regimes based on the Knud-
sen number according to H.S. Tsien. Figure 1.1 shows one of the classifications. Since
the flow properties may vary significantly in a flow field, the definition of Knudsen
number shall be chosen to characterize the local flow properties [5].
In the continuum regime Kn ≤ 0.001, the continuum hypothesis is considered valid
and the flow can be well described by the Navier-stokes equations. Many numerical
methods are developed for solving the Navier-stokes equations. A typical method is
to use the Riemann solvers [9] for inviscid terms, central discretization for viscous
3

terms, and Runge-kutta method for time integration. The turbulent flow is either
simulated by the Reynold-averaged Navier-stokes (RANS) equations with turbulence
models, Large-eddy Simulation (LES), or Direct Numerical Simulation (DNS) [10].
Since the Navier-stokes equations can be derived form the Boltzmann equation, a
Navier-stokes solver can be developed from the kinetic theory as well, such as the
Lattice Boltzmann method (LBM) [11] and the Gas-kinetic scheme (GKS) [12].
In the slip regime 0.001 ≤ Kn ≤ 0.1, the non-equilibrium phenomena appear near the
boundary. The tangential velocity of the gas near the solid surface is non-zero relative
to the surface and the temperature of the gas near the surface is not equal to the sur-
face temperature. The phenomena are called velocity slip and temperature jump, and
their expressions can be derived from the kinetic theory to different order of approx-
imations [5, 13]. Usually the Navier-stokes equations are considered valid in the bulk
region of the flow in this regime, and slip boundary conditions are supplied for the
simulation. Higher-order macroscopic equations can be derived from the kinetic the-
ory. D. Burnett derived the second-order approximations of stress tensor and heat flux
from Chapman-Enskog expansion [5, 14]. H. Grad derived the extended macroscopic
equations from Hermite expansion for 13 macroscopic quantities — density, velocity,
pressure, stress tensor, and heat flux, namely Grad 13 moments equations [5, 15, 16].
In recent years, H. Struchtrup proposed the Regularized 13 moments equations (R13)
based on the Chapman-Enskog expansion and Grad’s method [16]. Y. Sone also de-
veloped another asymptotic theory to analysis the non-equilibrium phenomena under
small Knudsen numbers [17].
In the transition regime 0.1 ≤ Kn ≤ 10 and free molecular regime Kn ≥ 10, the
non-equilibrium phenomena become significant in the whole system, and even the
high-order macroscopic equations can hardly go beyond Kn ≥ 1. For the free molec-
ular regime, the Boltzmann equation can be greatly simplified due to the absence
of collision term, and many problems can be solved theoretically. For the transition
regime, the particle collision still plays an important role and is very difficult for the-
oretical analysis. The direct numerical simulation becomes a dominant tool in this
regime.
The numerical simulation methods for rarefied gas can be classified into two types.
The first type is the particle-based method to directly simulate the physical behavior
4

of gas particles. Another type is the numerical methods based on partial differential
equations (PDEs), such as the Boltzmann equation or its model equations.
The Direct Simulation Monte Carlo (DSMC) method proposed by G.A. Bird [18] is a
famous particle-based method. DSMC use simulation particles to represent real parti-
cles, and decompose the particle behavior during a time step into free transport stage
and collision stage. The free transport stage is deterministic and the collision stage is
Monte Carol. Since DSMC is particle-based, it’s not restricted by the assumptions in
the Boltzmann equation, such as two-body collisions. It’s relatively easy to implement
physical models for complex flow situations, such as chemical reactions and radia-
tions. DSMC is also very efficient for high speed rarefied flow and is widely applied
to astronautics. But due to the decomposition, the time step should be smaller than
the collision time and the mesh size should be smaller than the mean free path. This
limits the wide application of DSMC in small Knudsen number flows. In low-speed
micro flows, DSMC may experience significant statistical errors.
The discretization of the full Boltzmann equation consists of a large part of the PDE-
based methods. The key difficulty is the computation of the multiple integrals in the
collision term. Different approaches are proposed to address this problem, including
the discrete velocity method (DVM) [19, 20] and spectral method [21, 22, 23]. The nu-
merical method can be simplified and the computational cost can be reduced if model
equations are employed, instead of the full Boltzmann equation. This includes the
discrete ordinate method (DOM) [24, 25] and the unified gas-kinetic scheme (UGKS)
[26, 27]. But the collision term in model equations may not be able to capture all the
delicate properties of the gas flow in transitional regime in some cases. The PDE-
based methods are generally free of statistical errors, but not as flexible as DSMC due
to the intrinsic modeling underlying the PDEs. The PDE-based methods require dis-
cretization of the particle velocity space. The full Boltzmann equation has to be solved
in a six-dimensional space (three for location and three for particle velocity) instead of
three spatial degrees of freedom in the macroscopic equations. For model equations,
reduced distribution functions [28] can be introduced to lower the required simulation
dimensions for one-dimensional and two-dimensional problems. In small Knudsen
numbers and low-speed flows, where the non-equilibrium phenomena are weak, the
discrete velocity points can be reduced. However, in highly non-equilibrium flows,
numerous velocity points are required to capture the irregular distribution functions.
5

Thus, the PDE-based methods are usually not as efficient as DSMC in hypersonic flow
simulations (typically highly non-equilibrium). In order to relieve this problem, adap-
tive algorithms are proposed [29, 30]. Most PDE-based methods, except UGKS, use a
similar strategy as that in DSMC method which decomposes the particle motion into
free transport and collision, where the flux is computed from a free transport process
and the collision is only handled as a source term. Consequently, they experience the
same limitation on time step and mesh size as the DSMC method.
Although both continuum regime and transitional/free molecular regime have rela-
tively mature numerical methods for their study, the numerical method which covers
all flow regimes is still highly demanded. To develop such a scheme is challenging.
A traditional approach for the multi-scale problem is the hybrid method. In most
hybrid method, the physical computational domain is decomposed into different re-
gions according to the local degree of rarefaction or non-equilibrium status, where
each region only covers one flow regime, and different methods are used in differ-
ent regions [31, 32, 33, 34]. The main difficulty of this approach is how to determine
the criteria for the decomposition and how to exchange the data between different
methods. Other methods including decomposition of the particle velocity space into
fast particles solved by kinetic equations and slow particles solved by hydrodynamic
equations [35], or simultaneously solving the kinetic equations to provide transport
coefficients for the hydrodynamic equations [36].
Unified gas-kinetic scheme [26, 27] is another approach developed in recent years
aiming to solve the multi-scale problems. In comparison with the hybrid approach,
the UGKS uses a single method for all flow regimes without any decomposition in
physical or velocity space. It is based on the evolution solution of the BGK-type
model equation, but different from any other PDE-based method, the free transport
and collision are not treated separately due to the evolution solution. Thanks to the
coupling of transport and collision, the time step and mesh size are not limited by the
particle collision time and mean free path, and the flow physics from free molecular
flow to continuum flow can be recovered automatically in different flow regimes.
These features enable UGKS to be an efficient multi-scale method in the simulation of
low-speed micro-flows [37].
6

1.3 Objectives and Organization of the Thesis
The main objectives of the current thesis research are,
• Validate unified gas-kinetic scheme for the simulation of non-equilibrium flows
in various flow regimes;
• Study the non-equilibrium phenomena in low-speed micro-flows in various flow
regimes;
• Further develop the scheme for a wider applicable area.
The thesis is organized as follows:
Chapter 2 starts with a brief introduction of the Boltzmann equation and its model
equations for single-component gas. Then the unified gas-kinetic scheme and discrete
unified gas-kinetic scheme (DUGKS) for single-component gas are presented. Some
numerical examples are provided to validate the schemes and the simulation codes.
Chapter 3 presents with a brief introduction of the Boltzmann equation and its model
equations for multi-component gas. Then the UGKS for multi-component gas is con-
structed. Several test cases are simulated to validate the scheme, including shock
structures at different Mach numbers and micro-channel flows driven by small pres-
sure, temperature, and component concentration gradients.
Chapter 4 covers the study of the sound-wave propagation in monatomic gas under
a wide range of sound wave frequencies. The sound propagating parameters are ex-
tracted and compared with different methods, including experimental measurements
from continuum to free molecular flow. This provides a solid validation for the UGKS
to study non-equilibrium flow in different flow regimes.
Chapter 5 studies the cross-coupling of thermal-osmosis and mechano-caloric effect
in slightly non-equilibrium gas for micro-channels with planner surfaces and ratchet
surfaces. The variation of cross-coupling coefficients as a function of Knudsen number
is obtained. And a preliminary optimization for the Knudsen pump is also included.
Chapter 6 summarizes current work and discusses further research directions.
7

Chapter 2
Numerical Modeling of Single-component Gas
2.1 Boltzmann Equation and Its Model Equations
The Boltzmann equation for single-component monatomic gas without chemical re-
actions and external forces is [5]
∂ f
∂t+ u · ∂ f
∂x= Q( f ), Q( f ) =
∫ ∞
−∞
∫ 4π
0( f ′ f ′1 − f f1)urσdΩdu1, (2.1)
where f = f (x, t, u) is the velocity distribution function, x = (x1, x2, x3) = (x, y, z) is
the coordinates, u = (u1, u2, u3) = (u, v, w) is the particle velocity, ur is the relative
velocity, σ is the differential collision cross section, Ω is the solid angle, and du =
du1du2du3. The right hand side is the collision term describing the change of f due
to two-body collision between particles, where f ′ is the distribution function of post-
collision velocity.
The equilibrium distribution function is unique, and is a Maxwellian,
g = ρ
(
m
2πkBT
)3/2
exp
(
− m
2kBT(u − U)2
)
, (2.2)
where ρ is density, T is temperature, U = (U1, U2, U3) = (U, V, W) is the macroscopic
velocity, m is molecular mass, and kB is the Boltzmann constant.
Macroscopic quantities can be obtained by taking the corresponding moments of f .
Specifically,
W =
ρ
ρU
ρE
=∫
ψ f du, (2.3)
8

Pij =∫
cicj f du, (2.4)
p =1
3Pii, (2.5)
qi =1
2
∫
cicjcj f du, (2.6)
where W are the conservative flow variables, E is the total energy density, ψ =
(1, u, u2/2)T are the collisional invariants, c = u − U is the peculiar velocity, P is
the stress tensor, p is pressure, and q is heat flux.
Due to the conservation of mass, momentum, and energy during collisions, Q( f )
satisfies the compatibility condition,
∫
ψQ( f )du = 0. (2.7)
The Chapman-Enskog expansion of the Boltzmann equation gives the Euler equations
as zero-order approximation and the Navier-stokes as first-order approximation, as
well as the expressions for transport coefficients [5, 8].
Bhatnagar, Gross, and Krook [6] proposed a simplified model equation, i.e. BGK
equation. It has the following general form,
∂ f
∂t+ u · ∂ f
∂x= Q( f ), Q( f ) =
f+ − f
τ, (2.8)
ord f
dt= Q( f ), (2.9)
where f+ is the post-collision distribution function and τ is relaxation time. The BGK
equation maintains most important characters of the Boltzmann equation, such as the
H-theorem, conservations, etc.
Integrating Eq.(2.9) along the characteristic line and assuming τ is a local constant, an
analytic solution can be constructed [38],
f (x, t, u) =1
τ
∫ t
tnf+(x′, t′, u)e−(t−t′)/τdt′ + e−(t−tn)/τ f0(x − u(t − tn), u), (2.10)
where x′ = x − u(t − t′) and f0 is the distribution function at t = tn.
9

In the original BGK equation, f+ = g. The Chapman-Enskog expansion to the first-
order gives the same Navier-stokes equations, except the different transport coeffi-
cients. Prandtl number from the BGK equation is
PrBGK = cpµBGK
κBGK= 1, (2.11)
where cp is the specific heat at constant pressure, µ is the viscosity coefficient, and κ
is the heat conduction coefficient. However, the correct value should be Pr = 2/3 for
monatomic gas. Various improved BGK-type model equations are proposed to give a
realistic Prandtl number, such as BGK-Shakhov model [39], ES-BGK model [40], and
the general model [41]. The idea of BGK-Shakhov model and ES-BGK model can also
be applied to diatomic gas, such as the Rykov model [42] and the polyatomic ES-BGK
model [43].
In the BGK-Shakhov model, f+ is a third-order Hermite polynomial, where the co-
efficients are determined by requiring the first 13 moments equations coincide with
that of Boltzmann equation of pseudo-Maxwell molecules [39]. It takes the following
form,
f+ = g + g+ = g
[
1 + (1 − Pr)ciqi
(
cicim
kBT− 5
)
m
5pkBT)
]
. (2.12)
The relaxation time τ is equal to the collision time,
τ =µ
p. (2.13)
In the ES-BGK model, f+ is chosen to maximize the entropy while satisfies the mo-
ments of f up to second-order [40]. It takes the following form,
f+ = ρ1
√
|2πT′|exp
(
−1
2c · T′−1 · c
)
, (2.14)
where T′ is a tensor,
T′ =(
1
Pr
)
kB
mTδij +
(
1 − 1
Pr
)
Pij
ρ. (2.15)
And the relaxation time is
τ =1
Pr
µ
p. (2.16)
In the general model proposed by Chen et al. [41], f+ is a combination of BGK-
Shakhov and ES-BGK model, and τ takes the same form as that in Eq.(2.16).
f+ = g+Shakhov + f+ES, (2.17)
10

where Pr in g+Shakhov is replaced by a coefficient CShak, Pr in f+ES and τ is replaced by a
coefficient CES.
The dynamic viscosity coefficient µ can be computed from the Sutherland’s law,
µ = µref
(
T
Tref
)3/2 (Tref + Ts
T + Ts
)
, (2.18)
or other molecular models, such as hard sphere or variable hard sphere,
µ = µref
(
T
Tref
)β
, (2.19)
where µref and Tref are the reference viscosity and temperature, and Ts is Sutherland
temperature. Here β is the temperature dependency index. For example, β is equal
to 1/2 for hard sphere model.
The mean free path is defined as [5]
λ = c/(urσTn), (2.20)
where c is the mean thermal speed, ur is relative velocity, σT is the collision cross
section, and n is number density. For variable soft sphere in equilibrium [5],
λ =4β1(7 − 2β2)(5 − 2β2)
5(β1 + 1)(β1 + 2)
(
m
2πkBT
)1/2 µ
ρ, (2.21)
where β1, β2 are two coefficients, and β2 is equal to the temperature dependency
index in Eq.(2.19). For hard sphere or variable hard sphere molecule, β1 = 1. It can
be found that λρ is a function of temperature only, and is constant for hard sphere.
Since the definition of λ may take different form in the literature, we will present the
definition of λ for each simulation.
2.2 Unified Gas-kinetic Scheme
Gas-kinetic scheme was originally proposed by Xu for the simulation of continuum
flow [38, 44, 12], and then extended to a multi-scale method for all Knudsen numbers
monatomic flow [26, 27], and also diatomic gas [45]. An important idea of the unified
gas-kinetic scheme is to model the gas flows physically in the discrete simulation
space, instead of direct discretization of the partial differential equations [46]. In the
11

finite-volume framework, the evolution of distribution function and the conservative
variables are
f n+1 = f n − 1
V
∫ tn+1
tn
∫
∂Vu · n f dsdt +
1
V
∫ tn+1
tn
∫
Q( f )dVdt, (2.22)
and
Wn+1 = Wn − 1
V
∫ tn+1
tn
∫
∂V
∫
ψu · n f dudsdt, (2.23)
where V is the volume of the cell, ∂V is the cell interface, s is the area, and n is the
outward unit normal. The modeling of f at the interface and Q( f ) inside the cell
depend on the spatial and time scales to identify the flow evolution. Different models
can be used for the interface distribution function and the collision term [47]. Other
physical considerations can also be embedded [48].
In UGKS, the interface distribution function is modeled by the BGK-type equation
and is calculated from the analytic solution Eq.(2.10), instead of an upwind scheme.
As shown in Eq.(2.10), the solution consists of a hydrodynamic part and a kinetic part.
The hydrodynamic part is the integration of f+, which include the contribution from
collisions. And the kinetic part is the transport of initial condition f0, which recovers
the contribution from free transport. The contribution from the two parts to the final
distribution function is dynamically determined by the ratio of relaxation time to
the numerical time step. If the relaxation time is much smaller than time step, the
hydrodynamic part dominants. With appropriate modeling, the hydrodynamic part
can recover the Navier-Stokes distribution function with second-order accuracy. If the
relaxation time is much larger than the time step, the kinetic part dominants. With
well prepared initial condition, the physics of free transport can be recovered with
second-order accuracy. This property has exactly the asymptotic preserving property
[49]. In addition, the time step and cell size are not limited to the collision time and
mean free path due to the coupling of collision and free transport in the evaluation of
interface flux.
In UGKS, the distribution function and conservative variables are updated simul-
taneously. This seems unnecessary at first glance since macroscopic quantities are
moments of the distribution function. The particle velocity space is continuous in
the domain of (−∞, ∞). However, it’s discretized and truncated in numerical simu-
lation. And the moments of the distribution function is obtained through numerical
quadrature. Consequently, the compatibility condition in Eq.(2.7) can’t be accurately
12

satisfied. The independent updating of the conservative variables can ensure the con-
servation. Moreover, the independent updating of the conservative variables allows
an implicitly or semi-implicitly discretized collision term to be evaluated explicitly. It
will be shown in later sections.
The general steps of UGKS are as follows:
Step 1: Initialization of the flow field. The flow field can be initialized by assuming
equilibrium distribution or other specific form.
Step 2: Determination of the time step. Similar to the traditional CFD, the time step
is calculated from the Courant-Friedrichs-Lewy (CFL) condition. For example,
∆t = CFLV
∑3i=1 max(ui)si
, (2.24)
where si is the projected area in xi direction.
Step 3: Reconstruction. The derivatives of the distribution function at each particle
velocity and conservative flow variables in each cell are constructed and constrained
by a slope limiter. In this thesis, the van Leer limiter is used for all the simulations,
s = (sign(sr) + sign(sl))|sr||sl|
|sr|+ |sl|, (2.25)
where sr and sl are the slopes.
Step 4: Calculating interface flux. The flux of distribution function and conservative
variables are evaluated from the analytic solution of BGK-type equation.
Step 5: Updating cell-averaged flow variables. The conservative variables are first
updated, then followed by the distribution function.
Step 6: Checking the output condition. If not satisfied, go back to step 2.
2.2.1 Discretization of Velocity Space
Physically, particles may take any velocity in range (−∞, ∞). However, the particle
velocity space needs to be discretized and truncated by a finite number of velocity
points in the simulation. The moments of the distribution function are then calculated
from numerical quadrature.
13

The criteria of the discretization is to get reasonable accurate moments — especially
the low order ones — from numerical quadrature, and to maintain the number of
velocity points as small as possible at the same time. In continuum flow and slightly
disturbed rarefied flow, the distribution function is not far away from Maxwellian.
Gaussian quadrature is quite accurate and efficient under such a condition. And the
truncation range can be roughly estimated as (Ui − 4√
kBT/m, Ui + 4√
kBT/m), i =
1, 2, 3. If the flow stays in strong non-equilibrium state, the distribution function may
be quite different from a Maxwellian. Newton-cotes integration can be used in such
a situation with increased velocity points. The truncation range can be the same as
the above for low-speed flows. But in hypersonic flows, the truncation range should
be enlarged. In this thesis, a specially designed Gaussian Hermite quadrature [50]
and the compound Boole rule are used. And the same discretization is applied to
all cells. A more efficient way for velocity space discretization is to use the adaptive
algorithms [29, 30], where the discrete velocity space can be different in each cell and
is dynamically adjusted.
2.2.2 Polyatomic Gas
The formulas presented in section.2.1 only apply to monatomic gas, but most of the
time we would like to simulate polyatomic gas, especially the diatomic one (e.g. the
air). The implementation of UGKS for diatomic gas can be found in reference [45], but
here a simpler method is chosen without distinguishing the temperatures of different
types of motion.
For polyatomic gas molecule, the degree of freedom other than the translational ones
might be considered as the internal degree of freedom. For example, the internal
degree of freedom in diatomic gas without vibrational excitation is the two rotations.
Denote the internal degree of freedom as ξ = (ξ1, ..., ξM), where M is the total number
of internal degree of freedom. The distribution function is now also a function of ξ
and becomes f = f (x, t, u, ξ). And specifically, the Maxwell distribution function
becomes
g = ρ
(
m
2πkBT
)(3+M)/2
exp
(
− m
2kBT
(
(u − U)2 + ξiξi
)
)
. (2.26)
If the BGK-Shakhov model is chosen, its formula keeps unchanged since it is derived
14

for monatomic gas thus only applies to translational degree of freedom.
The macroscopic variables are
W =∫
ψ f dudξ, (2.27)
and
Pij =∫
cicj f dudξ, (2.28)
qi =1
2
∫
ci(cjcj + ξkξk) f dudξ, (2.29)
where the collisional invariants are ψ = (1, u, (u2 + ξiξi)/2), and dξ = dξ1, ...dξM.
2.2.3 Reduced Distribution Functions
The particle velocity space has 3 + M dimensions. However, by introducing the re-
duced distribution functions [28], the number of dimensions requiring discretization
can be reduced. Suppose the simulation problem is in N-dimensions, the other 3 − N
dimensions can be considered as internal degree of freedom and are denoted by
ξ∗i (i = 1, ..., 3 − N), then a pair of reduced distribution functions are
h =∫
f dΞ, b =∫
(ξ∗i ξ∗i + ξ jξ j) f dΞ, (2.30)
where dΞ = dξ∗1 ...dξ∗3−Ndξ1...dξM. Then Eq.(2.8) becomes a pair of equations,
∂h
∂t+ u · ∂h
∂x=
h+ − h
τ,
∂b
∂t+ u · ∂b
∂x=
b+ − b
τ,
(2.31)
where u = (u1, ..., uN) and x = (x1, ..., xN).
The Maxwell distribution becomes
gh =∫
gdΞ = ρ
(
m
2πkBT
)N/2
exp
(
− m
2kBTci ci
)
,
gb =∫
(ξ∗i ξ∗i + ξ jξ j)gdΞ = (3 + M − N)
(
p
ρ
)
gh,
(2.32)
where U = (U1, ..., UN) and c = u − U.
15

For BGK-Shakhov model, f+ becomes
h+ =gh
[
1 + (1 − Pr)ciqi
(
ci cim
kBT− 2 − N
)
m
5pkBT)
]
,
b+ =gb + gh(1 − Pr)ciqim
5pkBT
[
ci ci(3 + M − N) +p
ρ
(
N2 − N(3 + M)− 2M)
]
,
(2.33)
where q = (qi, ..., qN). Some useful results of the moments of Maxwellian can be
found in appendix B.
The macroscopic variables are
W =
∫
hdu
∫
uihdu
∫
1
2(uiuih + b)du
, (2.34)
and
Pij =∫
ci cjhdu, (2.35)
qi =1
2
∫
ci(cj cjh + b)du. (2.36)
For simplicity, the formulas presented in latter sections are for monatomic gas with
the original f .
2.2.4 Calculate Interface Flux
The distribution function at the interface is described by Eq.(2.10). And the flux can be
calculated with proper approximation of f+ and f0. Suppose the interface is located
at x0 with a local coordinate (e1, e2, e3) and e1 is the outward unit normal n.
In UGKS, the initial condition f0 is assumed to be linearly distributed inside each cell
16

and is discontinuous across the interface,
f0(x, u) =
(
f L0 (x0) + ∆x · ∂ f L
0
∂x
)
(1 − H[∆x · n])
+
(
f R0 (x0) + ∆x · ∂ f R
0
∂x
)
H[∆x · n],
(2.37)
where f L0 and f R
0 are the initial conditions at the left and right hand side cell of the
interface and ∆x = x − x0. H[x] is the Heaviside step function,
H[x] =
0, x < 0,
1, x ≥ 0.(2.38)
The post-collision distribution function f+ is approximated by a first order Taylor
expansion at the interface. It is assumed to be continuous at the interface, but has
different normal derivatives at the left and right sides of the interface. For simplicity,
the derivatives of f+ is actually replaced by the derivatives of Maxwellian distribution,
f+(x, t,u) = f+0 (x0)
+g0(x0)[
(1 − H[x])aL x + H[x]aR x + by + cz + A(t − tn)]
,
(2.39)
where f+0 and g0 are the distributions at t = tn and x = ∆x · n, y = ∆x · e2, z = ∆x · e3.
Substituting Eq.(2.37) and Eq.(2.39) into the analytic solution Eq.(2.10), the distribu-
tion function at the interface is
f (x0, t, u) =(
1 − e−(t−tn)/τ)
f+0 (x0)
+(
(t − tn + τ)e−(t−tn)/τ − τ) (
aLH[u] + aR(1 − H[u]))
ug0(x0)
+(
(t − tn + τ)e−(t−tn)/τ − τ)
(bv + cw)g0(x0)
+(
t − tn + τ(e−(t−tn)/τ − 1))
Ag0(x0)
+e−(t−tn)/τ
(
f L0 (x0)− (t − tn)u · ∂ f L
0
∂x
)
H[u]
+e−(t−tn)/τ
(
f R0 (x0)− (t − tn)u · ∂ f R
0
∂x
)
(1 − H[u]),
(2.40)
17

where u = u · n, v = u · e2, w = u · e3.
Since the interface distribution function in Eq.(2.40) contains the information of time,
there is no need to use Runge-Kutta time stepping method. The integration of Eq.(2.40)
over t already has second-order accuracy in time,
∫ tn+1
tnf (x0, t, u)dt =
(
τe−∆t/τ + ∆t − τ)
f+0 (x0)
+τ(
−e−∆t/τ(∆t + 2τ)− ∆t + 2τ) (
aLH[u] + aR(1 − H[u]))
ug0(x0)
+τ(
−e−∆t/τ(∆t + 2τ)− ∆t + 2τ)
(bv + cw)g0(x0)
+(
−τ2e−∆t/τ + ∆t2/2 − τ∆t + τ2)
Ag0(x0)
+τ(
1 − e−∆t/τ) (
f L0 (x0)H[u] + f R
0 (x0)(1 − H[u]))
+τ(
e−∆t/τ(∆t + τ)− τ)
u ·(
∂ f L0
∂xH[u] +
∂ f R0
∂x(1 − H[u])
)
,
(2.41)
where ∆t = tn+1 − tn. Note that when τ/∆t approaching infinity, the time related co-
efficients in Eq.(2.41) have limiting values. However, the simulation program may not
able to correctly reproduce the limits and large numerical errors may occur. In prac-
tice, the coefficients are expanded at τ/∆t → ∞ if τ/∆t excess some threshold value.
In current simulation, the threshold is chosen as 104. Now expressions are needed for
the coefficients aL, aR, b, c, A, relaxation time τ, f+0 (x0), and g0(x0) in Eq.(2.41).
Here τ, f+0 (x0), and g0(x0) are fully determined by the macroscopic quantities at
(x0, tn), if τ = τ0(x0) is chosen. The required macroscopic quantities are obtained by
taking moments of f (x0, tn, u), for example,
W0(x0) =∫
ψ(
f L0 (x0)H[u] + f R
0 (x0)(1 − H[u]))
du. (2.42)
The coefficients aL, aR, b, c, A are related to the spatial and time derivatives of g0, for
example,
aL,R =1
g0(x0)
(
∂g0
∂W0(x0)
)
(
∂WL,R0
∂x
)
x=x0
, (2.43)
A =1
g0(x0)
(
∂g0
∂W0(x0)
)(
∂W(x0)
∂t
)
t=tn
. (2.44)
18

And the coefficients are functions of particle velocities in the form of a = aiψi, where
ψi are the collisional invariants. Taking A as an example, ai are
a5 =ρ
3p2
(
2∂ρE
∂t+
(
UiUi −3p
ρ
)
∂ρ
∂t− 2Ui
∂ρUi
∂t
)
, (2.45)
ai+1 =1
p
(
∂ρUi
∂t− Ui
∂ρ
∂t
)
− Uia5 (i = 1, 2, 3), (2.46)
a1 =1
ρ
∂ρ
∂t− Uiai+1 −
1
2
(
UiUi +3p
ρ
)
a5, (2.47)
where the macroscopic quantities are those at (x0, tn). Detailed derivations of Eq.(2.45)
- Eq.(2.47) are given in appendix A.
Derivatives of conservative variables are still needed to fully determine aL, aR, b, c, A.
For example, the derivatives with respect to x are
(
∂WL,R0
∂x
)
x=x0
=WL,R
0 (x0)− W0(xL,R)
(x0 − xL,R) · n, (2.48)
where xL,R are the coordinate of the left and right cell centers. The derivative with
respect to time is determined by the conservative moment requirements on the first
order Chapman-Enskog expansion∫
ψ(gt(x0, tn) + u · gx(x0, tn))du = 0 [29],
(
∂W(x0)
∂t
)
t=tn
= −∫
(
(aLH[u] + aR(1 − H[u]))u + bv + cw)
g0(x0)ψdu. (2.49)
Now all the variables in Eq.(2.40) are known. The flux of distribution function and
conservative variables across the interface from tn to tn+1 are
∫ tn+1
tn
∫
∂Vu · n f dsdt =
N
∑i=1
Fi =N
∑i=1
si
∫ tn+1
tnu · n f (x0, t, u)dt, (2.50)
∫ tn+1
tn
∫
∂V
∫
ψu · n f dudsdt =N
∑i=1
Fi =N
∑i=1
si
∫ tn+1
tn
∫
ψu · n f (x0, t, u)dudt, (2.51)
where N is the number of interfaces of a cell. The moments of g over the particle
velocity can be calculated analytically instead of numerical quadrature [26], and some
useful results are given in appendix B.
The procedure of flux evaluation can be summarized as follows,
Step 1: Preparing the initial conditions f L,R0 (x0) and ∂ f L,R
0 /∂x.
19

Step 2: Calculating W0(x0) from Eq.(2.42) and the corresponding τ = τ0(x0), f+0 (x0)
and g0(x0).
Step 3: Calculating the spatial derivatives of W0 from Eq.(2.48), and then the coeffi-
cients aL,R, b, c from Eq.(2.45) - Eq.(2.47).
Step 4: Calculating the time derivative of W from Eq.(2.49) and coefficient A.
Step 5: Calculating the interface flux by using Eq.(2.41).
2.2.5 Update Cell-averaged Flow Variables
For BGK-type model equations, the collision term can be discretized by the trape-
zoidal rule. Then Eq.(2.22) and Eq.(2.23) become
f n+1 = f n − 1
V
N
∑i=1
Fi +∆t
2
(
Qn +f+(n+1) − f n+1
τn+1
)
, (2.52)
Wn+1 = Wn − 1
V
N
∑i=1
Fi. (2.53)
In the simulation, the conservative variables are first updated by Eq.(2.53), then f+(n+1)
and τn+1 are known. Finally, the semi-implicit Eq.(2.52) is updated explicitly,
f n+1 =
(
1 +∆t
2τn+1
)−1[
f n − 1
V
N
∑i=1
Fi +∆t
2
(
Qn +f+(n+1)
τn+1
)]
. (2.54)
2.2.6 Boundary Conditions
Solid surface
Due to the existence of velocity slip and temperature jump in rarefied flow, kinetic
boundary conditions should be used, such as the Maxwell boundary condition and
the Cercignani-Lampis-Lord (CLL) model [5]. In Maxwell boundary condition, there
are two types of interaction between the particles and the solid surface — diffusive
reflection and specular reflection.
20

For diffusive reflection, the distribution function of reflected particles is a Maxwellian
determined by the density, velocity, and temperature on the surface. Typically, the
velocity and temperature of the surface are given. And the density is calculated from
the requirement of no particles penetrating the surface,
∆t∫
u≥0ugwdudt +
∫ tn+1
tn
∫
u<0u findudt = 0, (2.55)
where gw is the Maxwellian at the surface and fin is the distribution function of in-
coming particles. The surface is assumed to be located at the left hand side. Although
the moments of gw can be calculated analytically, numerical integration is used in the
simulation to minimize the error in macroscopic conservation.
For specular reflection, the particles are reflected with unchanged tangential velocity
but opposite normal velocity. The distribution function of the reflected particles is
fr(u) = fin(−u). (2.56)
For a surface not parallel to the coordinate system, velocity of the reflected particles
may not fall in the discrete velocity points, and interpolation is generally needed. But
the conservation has to be maintained during the interpolation. In this thesis, the
surface is always parallel to the coordinate system for the specular reflection cases.
Finally, the distribution function at the solid boundary is a combination of the two
streaming flows,
f = (βgw + (1 − β) fr) H[u] + fin(1 − H[u]), (2.57)
where β is the thermal accommodation coefficient in [0, 1].
The incoming fin can be calculated from different methods. A simple method is to
extrapolate the distribution function from interior region to the surface, and use it as
fin. A more complex method is to use the extrapolated distribution function as an
initial condition, and based on the method described in section 2.2.4 to obtain a time
accurate distribution function at the interface as fin. When calculating fin through this
method, the derivatives of f and W on both sides can be assumed to be equal.
Mirror symmetry
The implementation is the same as solid surface with specular reflection.
21

Inflow and outflow
In continuum flow, the inflow/outflow boundary conditions are usually determined
based on the characteristics or Riemann invariants. For example, the pressure inlet
and outlet boundary conditions for internal flow can be
1. Inlet: extrapolating the normal velocity from the interior region. Pressure, tem-
perature, and the tangential velocity are specifically given.
2. Outlet: only the pressure is specified, other quantities are extrapolated from
interior region.
In micro-channel flows, the inlet/outlet boundary conditions are determined in the
same way as in continuum flows, unless otherwise stated. For external flows, espe-
cially the hypersonic ones, a semi-empirical boundary condition can be used to take
into account the rarefied effects [29],
Wb = βW∞ + (1 − β)WR, (2.58)
where W∞ are the specified far-field macroscopic quantities, WR are the macroscopic
quantities constructed by Riemann invariants, and β is a coefficient in [0, 1]. A possible
choice for the coefficient is β = exp(−1/Kn) [29], where Kn is the global Knudsen
number.
2.2.7 Numerical Examples
In vacuum technology, the conductance Ccond of a duct between the vacuum system
and the vacuum pump is an important design property, which is defined as [4]
Ccond = JM/∆p, (2.59)
where JM is the mass flux and ∆p is the pressure difference of the inlet and outlet. In
this section, we will present the simulation of gas flow expansion to vacuum through
a short channel.
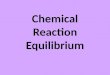
Figure 2.1 shows the schematic of the problem. A short channel of length L and
height H is connected to two identical reservoirs of length LR and height HR. The left
reservoir contains equilibrium gas with pressure p1 and temperature T0, and the right
22

Symmetry
LR L
HR/2
H/2
p1, T0 p2 = 0
T0
Diffusive reflection
Figure 2.1: Flow expansion to vacuum: schematic of the problem.
reservoir is vacuum. The solid lines are solid surface with fully diffusive reflection
maintained at T0, the dashed lines are inlet/outlet boundaries, and the dash-dotted
line is the symmetry line. At the inlet, the gas is maintained at p1, T0. At the outlet,
the interface distribution function is chosen as
f = finH[u], (2.60)
since there are no particles entering the channel. The Knudsen number is defined as
Kn =λL
H=
(
c
urσTn
)
L
1
H, (2.61)
where λL is the mean free path at the left reservoir. In the literature, the rarefaction
parameter δ is more frequently used instead of Knudsen number [51],
δ =p1H
µ1
√
m
2kBT0. (2.62)
From Eq.(2.21), their relation for hard sphere molecule is
δ =8
5√
π
1
Kn. (2.63)
The mass flux can be calculated analytically in some limiting cases. If the length of
the channel is infinitely small (a slit), or the particles are specularly reflected in the
free molecular limit, the mass flux only consists of particles entering the channel from
the left reservoir,
J0M = H
∫ ∞
0ugLdu = p1H
√
m
2πkBT0. (2.64)
If the particles are diffusively reflected in the free molecular limit, the mass flux can
be calculated as [52]
J0M = βL→RH
∫ ∞
0ugLdu = βL→R p1H
√
m
2πkBT0, (2.65)
23

Table 2.1: Flow expansion to vacuum: reduced mass flux at L/H = 1.
δ J∗M (current) J∗M (DSMC [53]) Difference
0 0.683 0.684 0.1%
0.1 0.698 0.698 0.0%
0.2 0.710 0.708 0.3%
0.5 0.738 0.732 0.8%
1.0 0.773 0.767 0.8%
2.0 0.826 0.818 1.0%
5.0 0.928 0.927 0.1%
10.0 1.03 1.04 1.0%
20.0 1.14 1.15 0.9%
50.0 1.27 1.29 1.6%
100.0 1.34 1.36 1.5%
where βL→R is the transmission probability. It is the probability of a particle entering
the channel from the left and going to the right.
In the literature, a reduced mass flux is usually used to characterize the channel [51],
J∗M = JM/J0M. (2.66)
The conductance in Eq.(2.59) now becomes
Ccond = J∗MH
√
m
2πkBT0. (2.67)
Since the Knudsen number is changed by choosing different p1, where H and T0 are
kept constant, the conductance is proportional to the reduced mass flux.
In the simulation, the channel geometry is set to be L/H = 1 and the reservoir size
is chosen as LR = HR = 20H. The gas is assumed to be hard-sphere argon, and the
Shakhov model is chosen.
The transmission probability at the free molecular limit has theoretic solution, which
gives βL→R = 0.684 for L/H = 1 [52]. Then from Eq.(2.65) and Eq.(2.66), the corre-
sponding reduced mass flux is J∗M = βL→R = 0.684.
Table.2.1 shows the reduced mass flux at various rarefaction parameters, compared
24

(a) Pressure contour at δ = 100.
(b) Pressure contour at δ = 1.
Figure 2.2: Flow expansion to vacuum: pressure contour at rarefaction parameter
δ = 100, 1.
Pre
ssure
, te
mper
ature
, an
d M
ach
nu
mb
er
Figure 2.3: Flow expansion to vacuum: pressure, temperature, and Mach number
along the centerline at rarefaction parameter δ = 10.
25

with reference [53]. Good agreement is found for all rarefaction parameters with a
maximum difference of 1.6%, and the theoretic value at δ = 0 is reproduced correctly.
Current results are slightly different from that in reference [4], since the mesh here
is non-uniform and more refined near the channel in current simulation. Figure 2.2
shows the pressure contour around the channel at δ = 100, 1, and Figure 2.3 shows
the pressure, temperature, and Mach number along the centerline at δ = 10.
2.3 Discrete Unified Gas-kinetic Scheme for Compressible Flow
The discrete unified gas-kinetic scheme (DUGKS) is a simplified variation of the
UGKS method proposed by Z.L. Guo et al [54, 55]. The key difference between
DUGKS and UGKS is the way to get the cell interface gas distribution function, where
DUGKS discrete Eq.(2.9) into the form
f (x, t)− f (x − u(t − tn), tn) =t − tn
2(Q(x, t) + Q(x − u(t − tn), tn)), (2.68)
instead of integrating Eq.(2.9) as that in UGKS to use the analytic solution. Its influ-
ence on the interface flux will be discussed in detail.
In DUGKS, the evolution of distribution function and conservative variables are dis-
cretized in the same way as in Eq.(2.52) and Eq.(2.53) for BGK-type equation. The
evolution equation of conservative variables is not necessary for the procedure given
in reference [54, 55]. But here we present a slightly different procedure which needs
to update the conservative variables for exactly the same reason as in the UGKS. The
fluxes are
N
∑i=1
Fi = ∑i=1
∆tn+1si(u · n) f (x0, tn+1/2, u), (2.69)
N
∑i=1
Fi = ∑i=1
∆tn+1si
∫
ψ(u · n) f (x0, tn+1/2, u)du, (2.70)
where ∆tn+1 = tn+1 − tn. And the interface distribution function at t = tn+1/2 is
calculated from Eq.(2.68),
f (x0, tn+1/2)− f0(x0 − u∆tn+1/2)
=∆tn+1
4
(
Q(x0, tn+1/2) + Q0(x0 − u∆tn+1/2))
,
(2.71)
26

where f0 and Q0 are evaluated at t = tn.
Instead of f , a new variable
f = f +∆t
4Q, (2.72)
is stored and updated in the simulation. Since f is also a function of ∆t, it is not a
’state’ variable anymore as f . It should be careful to use the correct time step when
performing the transformation.
In terms of f , the evolution of the distribution function becomes
f n+1 = βn+11 (1 − βn
2) f n + βn+11 βn
2 f+(n) + (1 − βn+11 ) f+(n+1) − βn+1
1
1
V
N
∑i=1
Fi, (2.73)
and the calculation of interface distribution function in Eq.(2.71) becomes
f (x0, tn+1/2) = (1 − βn+1/23 ) f0(x0 − u∆tn+1/2) + βn+1/2
3 f+(x0, tn+1/2), (2.74)
the macroscopic flow variables are
W =∫
ψ f du, (2.75)
Pij =1
1 − β4
(
∫
cicj f du − β4
∫
cicj f+du
)
, (2.76)
qi =1
1 − β4
(
∫
cicjcj f du − β4
∫
cicjcj f+du
)
, (2.77)
where the coefficients are
βn+11 =
4τn+1 − ∆tn+1
2(2τn+1 + ∆tn+1),
βn2 =
2∆tn+1 − ∆tn
4τn − ∆tn,
βn+1/23 =
∆tn+1
4τn+1/2 + ∆tn+1,
β4 =∆t
4τ.
(2.78)
At the cell interface, the initial condition in Eq.(2.74) is approximated by
f0(x0 − u∆tn+1/2) =
(
f0(xL) + (x0 − xL − u∆tn+1/2) · ∂ f L0
∂x
)
H[u · n]
+
(
f0(xR) + (x0 − xR − u∆tn+1/2) · ∂ f R0
∂x
)
(1 − H[u · n]),
(2.79)
27

where xL, xR are the coordinates of the left and right cell center. And the post-collision
term in Eq.(2.74) is calculated from the compatibility condition,
∫
ψ f+(x0, tn+1/2)du =∫
ψ f0(x0 − u∆tn+1/2)du. (2.80)
When updating the cell-averaged flow variables, the conservative variables are first
updated, then f is updated by Eq.(2.73). The implementation of boundary conditions
is the same as in UGKS, except f is transformed to f . In numerical implementation,
the limiting values of the time related coefficients should be recovered correctly as an
AP scheme.
The procedure of DUGKS can be summarized as follows:
Step 1: Initializing the flow field f and W.
Step 2: Determining the time step from CFL condition.
Step 3: Reconstructing the derivatives of f .
Step 4: Calculating interface flux.
1. Prepare the initial condition from Eq.(2.79)
2. Calculate f+(x0, tn+1/2) from Eq.(2.80)
3. Calculate the flux with Eq.(2.74)
Step 5: The conservative variables are first updated, then f is updated by Eq.(2.73).
Step 6: Checking the output condition. If not satisfied, go back to the step 2.
2.3.1 Properties of the UGKS and DUGKS Schemes
It is clear that the procedure to update the cell-averaged flow variables are almost the
same in DUGKS and UGKS, thus there is no much difference in the computational
cost. Now comparing the steps needed to evaluate the flux,
1. Both DUGKS and UGKS need to prepare an initial condition f0 or f0, and calcu-
late conservative variables W and the corresponding g.
2. DUGKS don’t need to calculate aL,R, b, c, A and the moments of g0, due to its
transformation.
28

3. DUGKS has fewer terms in the expression of interface distribution function thus
needs less computer operations,
DUGKS : f (tn+1/2) = a1 f0 + a2g(tn+1/2),
UGKS : f (t) = (a1 + a2au + a3A)g0 + a4 f0 + a5 f 0x .
(2.81)
From the comparison, it is expected that less computational efforts are required in
DUGKS. For low speed isothermal flows, g can be further expanded in terms of Mach
number, and less velocity points are needed as in LBM [54]. The procedure presented
in [54, 55] requires two distribution functions to be stored in a cell, which further
reduces the computational effort, but increases the memory consumption and com-
munication time in parallel computation. With a large number of velocity points, the
memory and the communication will become a bottleneck. Therefore, one distribu-
tion function is stored in this thesis.
The simplification of flux evaluation in DUGKS heavily relies on the newly introduced
variable f and the property∫
ψ f du = 0, so it might be difficult to apply DUGKS to
some specific model equations.
Now we compare the difference of interface flux calculated by UGKS and DUGKS.
It can be shown that the interface fluxes of both methods share the similar structure.
For simplicity, f+ = g, continuous reconstruction, and constant ∆t and τ are assumed
in the following analysis.
In UGKS, the interface distribution function integrated along particle trajectory is
given in Eq.(2.41). Noting that
(a · u)g0(x0) = u · g0x, Ag0 = (
∂g
∂t)t=tn , gt(t
n) ≈ −u · g0x, (2.82)
the interface distribution function integrated by time in Eq.(2.41) can be casted into
∫ tn+1
tnf (x0, t)dt = a1g0(x0) + a2(u · g0
x) + a3 f0(x0) + a4(u · f 0x ), (2.83)
where
a1 =τe−∆t/τ + ∆t − τ, a2 = −τe−∆t/τ(∆t + τ)− ∆t2/2 + τ2,
a3 =τ(1 − e−∆t/τ), a4 = τe−∆t/τ(∆t + τ)− τ2.
(2.84)
29

In DUGKS, Eq.(2.79) can be rewritten as
f0(x0 − u∆t/2) = (1 − β4)(
f0(x0) + β5(u · f 0x ))
+ β4
(
g0(x0) + β5(u · g0x))
, (2.85)
where
β5 = −∆t/2. (2.86)
From Eq.(2.80),∫
ψg(x0,tn+1/2)du
=∫
ψg0(x0)du + (1 − β4)β5
∫
ψ(u · f 0x )du + β4β5
∫
ψ(u · g0x)du
≈∫
ψg0(x0)du + (1 − β4)β5
∫
ψ(u · g0x)du + β4β5
∫
ψ(u · g0x)du
≈∫
ψ(
g0(x0) + β5(u · g0x))
du,
(2.87)
then
g(x0, tn+1/2) ≈ g0(x0) + β5(u · g0x). (2.88)
Now the interface distribution in Eq.(2.74) integrated by time becomes
∫ tn+1
tnf (x0, t)dt =∆t f (x0, tn+1/2)
=a1g0(x0) + a2(u · g0x) + a3 f0(x0) + a4(u · f 0
x ),
(2.89)
where
a1 =2∆t2
∆t + 4τ, a2 = − ∆t3
∆t + 4τ,
a3 =∆t(4τ − ∆t)
∆t + 4τ, a4 =
∆t2(∆t − 4τ)
2(∆t + 4τ).
(2.90)
It is now clear that the interface fluxes in UGKS and DUGKS share the same structure,
but with different coefficients given in Eq.(2.84) and Eq.(2.90). For UGKS, the coef-
ficients contain exponential functions. For DUGKS, the coefficients are polynomials.
Here continuous reconstruction is assumed for simplicity, discontinuous reconstruc-
tion has the similar result.
From the comparison, it is expected that DUGKS share similar properties as UGKS,
such as second-order asymptotic preserving in the free molecular limit and the Navier-
stokes limit.
30

Norm
ali
zed
coeff
icie
nts
Figure 2.4: Normalized coefficients of DUGKS and UGKS as a function of local
Knudsen number. Here Kn = τ/∆t.
Figure 2.4 shows the normalized coefficients of DUGKS and UGKS as a function of
local Knudsen number. Here Kn = τ/∆t.
When τ/∆t = ∞, the flux from both methods is
∫ tn+1
tnf (x0, t)dt = ∆t f0(x0)−
∆t2
2(u · f 0
x ). (2.91)
When τ ≫ ∆t, we expand the coefficients at τ → ∞ and retain only the leading
orders, the fluxes are
UGKS :∆t2
2τg0(x0)−
∆t3
3τ(u · g0
x) + ∆t f0(x0)−∆t2
2(u · f 0
x ), (2.92)
DUGKS :∆t2
2τg0(x0)−
∆t3
4τ(u · g0
x) + ∆t f0(x0)−∆t2
2(u · f 0
x ). (2.93)
Here only the leading term of a2 is different. This is reasonable, since UGKS uses
analytic integration, so∫ ∆t
0 t2dt = ∆t3/3. And DUGKS uses the mid-point rule, so∫ ∆t
0 t2dt ≈ ∆t3/4.
31

When τ < ∆t, the differences in the coefficients seem large. But due to the symmetry
of the coefficients around zero axis in Figure 2.4 and f ≈ g for small Knudsen number,
the differences can cancel each other mostly, so the effective differences are still small.
For example, when τ/∆t = 0, the flux from both methods is
∫ tn+1
tnf (x0, t)dt = ∆tg0(x0)−
∆t2
2(u · g0
x), (2.94)
since f = g at the continuum limit. The main reason for the differences in the coef-
ficients between UGKS and DUGKS are due to the transformation used in DUGKS,
which combines the equilibrium and non-equilibrium gas distribution functions be-
cause of the BGK-type relaxation models.
Detailed analysis of the AP property can be found in references [54, 55].
2.3.2 Numerical Examples
Sod shock tube
In this section, the standard Sod shock tube is tested from free molecular limit to the
continuum limit. For a computational domain in x ∈ [0, L], the initial condition is
x ≤ L/2 : ρL, UL = 0, pL,
x > L/2 : ρR = 0.125ρL, UR = 0, pR = 0.1pL.
(2.95)
The left and right boundaries are maintained at its initial condition. The gas is as-
sumed to be air with hard sphere intermolecular interaction, then Pr = 0.72 and the
internal degree of freedom is 2. The reference Knudsen number is defined based on
the left initial state,
Kn =λL
L=
1
L
16
5
(
m
2πkBTL
)1/2 µL
ρL. (2.96)
Since λρ is constant for hard sphere molecule, the Knudsen number of the right initial
state is KnR = 8Kn.
The simulation is performed with Shakhov model for three different Knudsen num-
bers, Kn = 10, 10−3, 10−5, ranging from free molecular flow to continuum one. The
results are compared with that of UGKS. In the simulation, the physical space is dis-
cretized into 100 cells, and the velocity space is discretized into 201 points in the range
32

0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
0.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
Figure 2.5: Sod shock tube: density, velocity, temperature, and heat flux at Kn = 10.
of [−10√
2kBTL/m, 10√
2kBTL/m] with Newton-Cotes quadratures. The CFL number
in both methods is 0.5 and the output time is t = 0.15(L√
m/(2kBT)). The simulation
results are presented in non-dimensional form where
ρ =ρ
ρL, U =
U
(2kBTL/m)1/2,
T =T
TL, q =
q
ρL(2kBTL/m)3/2.
(2.97)
Figure 2.5 shows the density, velocity, temperature and heat flux at Kn = 10. The flow
is in free molecular regime and the flow field is well resolved. Figure 2.6 shows the
density, velocity, temperature, and heat flux at Kn = 10−3. The flow is in slip regime
and discontinuities begin to occur in the flow field. This is because the mean free
path becomes smaller compared to the cell size, so the flow structure such as shock is
not fully resolved. The scheme is gradually behaving like a shock-capturing scheme
33

0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
UGKS
DUGKS
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
UGKS
DUGKS
-0.008
-0.006
-0.004
-0.002
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
UGKS
DUGKS
Figure 2.6: Sod shock tube: density, velocity, temperature, and heat flux at
Kn = 10−3.
as the Knudsen number reduces. Figure 2.7 shows the density, velocity, temperature,
and heat flux at Kn = 10−5. The flow is in continuum regime and the flow field
clearly shows a rarefaction wave, a contact discontinuity, and a shock as that in a
typical continuum solution. The scheme is now a shock capturing scheme. It can
be found that the solutions of DUGKS and UGKS are almost indistinguishable in all
three figures.
Shock structure
Figure 2.8 shows the schematic of the shock structure problem. The upstream gas
p1, T1, Ma1 and downstream gas p2, T2, Ma2 satisfy the Rankine-Hugoniot condition
34

0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
-0.0002
-0.0001
0
0.0001
0.0002
0.0003
0.0004
0.0005
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
Figure 2.7: Sod shock tube: density, velocity, temperature, and heat flux at
Kn = 10−5.
and form a normal shock,
Ma2 =
√
Ma21(γ − 1) + 2
2γMa21 − (γ − 1)
, (2.98)
ρ2
ρ1=
(γ + 1)Ma21
(γ − 1)Ma21 + 2
, (2.99)
T2
T1=
(2 + (γ − 1)Ma21)(2γMa2
1 − γ + 1)
Ma21(γ + 1)2
, (2.100)
where Ma is the Mach number and γ is the ratio of specific heat. The gas is assumed
to be hard sphere argon gas, so µ ∝ T0.5, Pr = 2/3, and γ = 5/3. The mean free path
is defined by Eq.(2.21).
The simulation is performed with Shakhov model for Ma = 3, 8. The physical space
is in the range of x ∈ [−25λ1, 25λ1] and discretized into 100 cells, where λ1 is the up-
35

p1, T1,Ma1 p2, T2,Ma2
Figure 2.8: Shock structure: schematic of the problem.
No
rmal
ized
den
sity
an
d t
emp
erat
ure
No
rmali
zed
heat
flu
x a
nd
sh
ear
str
ess
Figure 2.9: Shock structure: density, temperature, heat flux, and shear stress at
Ma1 = 3.0.
stream mean free path. The velocity space is in the range of [−15√
2kBT1/m, 15√
2kBT1/m]
and discretized into 101 points. The CFL number in all cases is 0.95. The origin of the
figures is determined by requiring ρ(0) = (ρ1 + ρ2)/2. And the simulation results are
presented in non-dimensional form,
ρ =ρ − ρ1
ρ2 − ρ1, T =
T − T1
T2 − T1, q =
q
ρ1(2kBT1/m)3/2, τxx =
Pxx − p
2p1, (2.101)
where τxx is the shear stress.
Figure 2.9 shows the normalized density, temperature, heat flux, and shear stress at
Ma1 = 3.0. The density and temperature increase up to the downstream value in the
thin layer of the shock, and the intensive temperature increment induces a significant
heat flux within the shock. Figure 2.10 shows the normalized density, temperature,
heat flux, and shear stress at Ma1 = 8.0. When shock is stronger, the heat flux becomes
even higher. And it can be found that the simulation results of DUGKS match very
well with UGKS in both figures.
36

No
rmal
ized
den
sity
an
d t
emp
erat
ure
No
rmali
zed
heat
flu
x a
nd
sh
ear
str
ess
Figure 2.10: Shock structure: density, temperature, heat flux, and shear stress at
Ma1 = 8.0.
Lid-driven cavity
L
L
T0 T0
T0
ρ0, T0
T0, Uw
Figure 2.11: Lid-driven cavity: schematic of the problem.
Figure 2.11 shows the schematic of the lid-driven cavity problem. The gas initially at
rest with ρ0, T0 is confined by a rectangular container. Solid surfaces on the left, right,
and bottom are stationary with constant temperature T0. The solid surface on the top
is moving with velocity Uw and keeps a constant temperature T0. The gas is assumed
to be argon with VHS model such that µ = µ0(T/T0)0.81. The Knudsen number is
defined as
Kn =λ0
L, (2.102)
37

where λ0 is given by Eq.(2.21).
Simulations are performed with Shakhov model for Ma = Uw/(γkBT0/m)1/2 = 0.15
and Kn = 0.1. In the simulation, the physical space is discretized into 61 × 61 mesh
points for Kn = 0.1. The particle velocity space is discretized into 28× 28 mesh points
with Gaussian quadrature. The CFL number is 0.5.
Figure 2.12 shows the flow field at Kn = 0.1. The velocity magnitude is almost
symmetric and a large vortex is formed in the container. The heat flux is flowing from
the low temperature region to the high temperature region due to the non-equilibrium
effect. The horizontal velocity along the vertical centerline and the vertical velocity
along the horizontal centerline are also plotted and compared with the results of
UGKS. Excellent agreements are found.
In reference [27], UGKS is compared with DOM under different mesh resolutions,
and it turns out that UGKS is not very sensitive to it while DOM deteriorates quickly
when reducing the mesh points. Since DUGKS also coupled the free transport and
collisions during the flux evaluation, we would like to check whether this is still true
for DUGKS. Figure 2.13 shows the velocity profile along the centerline under three
mesh resolutions 61 × 61, 31 × 31, and 11 × 11. It can be found that even with 11 × 11
meshes, the velocity profiles are still well captured.
Computational cost
In this section, the computational cost of DUGKS and UGKS are compared by using
a one-dimensional shock structure problem. The codes of both methods are compiled
with parallelization turned off and all the parameters are set equal. To minimize the
fluctuation of the execution time, each case is repeated 5 times to obtain an average
value and 4000 iterations are performed for each simulation to ensure an execution
time > 10s.
Table 2.2 shows the execution time of DUGKS and UGKS for different velocity points.
It can be found that DUGKS is faster in general. And the difference tends to increase
to some constant value around 20% when increasing the velocity points.
38

(a) Temperature field and heat flux in
DUGKS.
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UGKS
DUGKS
(b) Vertical velocity along the horizontal
centerline.
(c) Velocity magnitude and streamlines in
DUGKS.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
UGKS
DUGKS
(d) Horizontal velocity along the vertical
centerline.
Figure 2.12: Lid-driven cavity: flow field at Kn = 0.1.
Table 2.2: Computational cost comparison of DUGKS and UGKS.
Velocity pointsExecution time (s)
DifferenceDUGKS UGKS
25 13.879 15.660 12.8%
49 20.496 24.164 17.9%
101 36.001 42.775 18.8%
201 63.008 76.257 21.0%
401 122.38 145.02 18.5%
39

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
61X61 (DUGKS)
11X11 (DUGKS)31X31 (DUGKS)
(a) Horizontal velocity along the vertical
centerline under different mesh resolutions.
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
61X61 (DUGKS)
11X11 (DUGKS)
31X31 (DUGKS)
(b) Vertical velocity along the horizontal
centerline under different mesh resolutions.
Figure 2.13: Lid-driven cavity: velocity profile under different mesh resolutions at
Kn = 0.1.
2.4 Conclusion
In this chapter, a brief introduction of the Boltzmann equation and its model equations
for single-component gas are given. Then the unified gas-kinetic scheme is presented
in detail. The simulation of flow expansion to vacuum through a short channel is
provided as a test case to validate the scheme and the simulation code. The reduced
flow rate matches with the reference solution of DSMC very well in different flow
conditions with a maximum difference of 1.6%. At the same time, the discrete unified
gas-kinetic scheme for compressible flow is presented. The differences between UGKS
and DUGKS are analysed. And it can be concluded that DUGKS preserves many main
properties of UGKS, such as second-order asymptotic preserving while reducing the
computational cost. Several numerical examples are provided to validate DUGKS,
including the sod shock tube, shock structure, and lid-driven cavity. The solutions
from UGKS and DUGKS are compared and excellent agreement is found, which is
consistent with the analysis. The comparison of computational cost between DUGKS
and UGKS shows that DUGKS is approximately 10% ∼ 20% faster than that of UGKS.
40

Chapter 3
Numerical Modeling of Multi-component Gas
3.1 Boltzmann Equation and Its Model Equations
For multi-component gas, the Boltzmann equation for component α is [56]
∂ fα
∂t+ uα ·
∂ fα
∂xα= Qα( f , f ), (3.1)
where
Qα( f , f ) =N
∑r=1
Qαr( fα, fr) =N
∑r=1
∫∫
( f ′α f ′r − fα fr)uαrσαrdΩdur. (3.2)
Term Qαα( fα, fα) is called self-collision term, and Qαr( fα, fr), α = r is called cross-
collision term.
In equilibrium, all components shall have Maxwell distributions with the same veloc-
ity and temperature. And macroscopic quantities of individual component α are
Wα =∫
ψ fαdu, (3.3)
Pα =∫
cαcα fαdu, (3.4)
pα =1
3Pα
ii , (3.5)
qα =1
2
∫
cαc2α fαdu, (3.6)
where cα = u − Uα.
Due to the momentum and energy exchange between components, there are source
41

terms in the momentum and energy equations of individual component,
∂ραUα
∂t+
∂ραUαUα
∂x+
∂Pα
∂x=∫
uQα( f , f )du, (3.7)
∂ραEα
∂t+
∂ραEαUα
∂x+
∂Pα · Uα
∂x+
∂qα
∂x=∫
1
2u2Qα( f , f )du. (3.8)
The non-zero source terms∫
uQα( f , f )du and∫
1/2u2Qα( f , f )du are called exchange
relations [57].
Similar to the single-component situation, a BGK-type model can be constructed for
the simplification of analysis and simulation. Existing BGK-type gas mixture models
can be classified into two categories. One is the multiple-BGK-operator model and
the other is the single-BGK-operator model.
In the multiple-BGK-operator models, every collision operator Qαr is approximated
by a BGK operator. The original model is proposed by Gross and Krook [58] for
binary mixture,∂ fα
∂t+ u · ∂ fα
∂x=
f+αα − fα
ταα+
f+αr − fα
ταr, (3.9)
where the relaxation time ταr has property nα/ταr = nr/τrα and n is the number
density. The post-collision term is,
f+αr = ρα
(
mα
2πkBTαr
)3/2
exp
(
− mα
2kBTαr(u − Uαr)
2
)
. (3.10)
If r = α, Tαr = Tαα and Uαr = Uαα are the temperature and velocity of component α.
If r = α, Tαr and Uαr are the mixture temperature and velocity of component α and
r, and are usually defined by requiring the exchange relations in coincidence with
that of the Boltzmann equation of Maxwell molecule. Several authors [59, 60, 61, 62]
proposed a modified form of the model, which linearize f+αr in terms of f+αα or vice
versa or combined.
In the single-BGK-operator models, only one global collision operator is used for each
component to take account of both self-collision and cross-collisions. One typical
model is proposed by Andries, Aoki, and Perthame (AAP model) [57],
∂ fα
∂t+ u · ∂ fα
∂x=
f+α − fα
τα, (3.11)
where
f+α = ρα
(
mα
2πkBT∗α
)3/2
exp
(
− mα
2kBT∗α(u − U∗
α)2
)
. (3.12)
42

The parameters T∗α and U∗
α are chosen to recover the exchange relations for Maxwell
molecule. Another typical model is the Ellipsoidal model for gas-mixture [63, 64].
Suppose a binary mixture with components α, r, the main idea of the model is to
impose an additional constraint, for example,
1
ρα
∫
uQαdu − 1
ρr
∫
uQrdu = −η(Uα − Ur), (3.13)
to allow the velocity of each component to relax to its equilibrium value at different
rate, then maximize the entropy to determine the form of f+.
Most existing models are derived by assuming Maxwell molecules, thus the cross
coupling of Dufour effect and Soret effect is missing [59]. In this thesis, the single-
BGK-operator models are preferred since
1. The multiple-BGK-operator models generally don’t satisfy the in-differentiability
principle [60, 57], which requires the model to fall back to the single component
BGK equation when all components are equal. But the single-BGK-operator
models usually do satisfy it.
2. If there are more than two components in the mixture, the multiple-BGK-operator
models are more complex.
In multi-component gas, there are three types of transport coefficients: viscosity, heat
conduction, and mass diffusion. Since the AAP model is derived based on the original
BGK, only one transport coefficient can be recovered correctly. While the Ellipsoidal
model has additional free parameter η that enables it to recover the viscosity and
diffusion coefficients. In this thesis, the AAP model is considered, the formulation for
Ellipsoidal model will be future work.
In the AAP model described by Eq.(3.11) and Eq.(3.12), the parameters T∗α and U∗
α are
connected to the macroscopic properties of individual components via [57]
U∗α =Uα + τα
N
∑r=1
2ρr
mα + mrθαr(Ur − Uα), (3.14)
3
2kBT∗
α =3
2kBTα −
mα
2(U∗
α − Uα)2
+τα
N
∑r=1
4mαρr
(mα + mr)2θαr
(
3
2kBTr −
3
2kBTα +
mr
2(Ur − Uα)
2
)
,
(3.15)
43

where θ is the interaction coefficient between particles. The collision time is deter-
mined by
1
τα= β
N
∑r=1
θαrρr
mr, (3.16)
where β is either 1 or chosen to coincide with the τ of single-component gas when all
components are equal. In this thesis, β = 1 is used for in the simulations. Different
type of molecules can be approximated by the choice of θαr, for example [65],
θαr =
4√
π
3
(
2kBTα
mα+
2kBTr
mr
)1/2 (dα + dr
2
)2
Hard sphere
0.422π
(
aαr(mα + mr)
mαmr
)1/2
Maxwell,
(3.17)
where dα, dr are the diameters of molecule and aαr is the constant of proportionality
in the intermolecular force law.
3.2 Unified Gas-kinetic Scheme
Similar to the single component formulation, the evolution of macroscopic variables
and distribution function for component α are
Wn+1α = Wn
α −1
V ∑i
Fiα +
∆t
τα(W
∗(n)α − Wn
α), (3.18)
and
f n+1α =
(
1 +∆t
2τn+1α
)−1[
f nα − 1
V ∑i
F iα +
∆t
2
(
Qnα +
f+(n+1)α
τn+1α
)]
, (3.19)
where W∗α = (ρα, ραU∗
α, ραE∗α) are the moments of
∫
ψ f+α du.
Eq.(3.15) and Eq.(3.16) show that W∗α and τα are determined by the macroscopic quan-
tities of all components. Once (W1, ..., WN) for all the components are known, the
calculation (W1, ..., WN) → (W∗1 , ..., W∗
N) and (W1, ..., WN) → (τ∗1 , ..., τ∗
N) can be done
from Eq.(3.15) and Eq.(3.16).
Noting that there is a source term in Eq.(3.18) that is evaluated explicitly. Theoretically,
summation of the source term in Eq.(3.18) for all components is zero. But numerical
errors may influence this conservation. Further improvements may be made to re-
move the explicit evaluation and ensure the conservation of mass, momentum, and
energy for mixture properties.
44

The integral solution for each component remains unchanged, so the interface distri-
bution function integrated along particle trajectory for component α is
∫ tn+1
tnfα(x0, t, u)dt =
(
ταe−∆t/τα + ∆t − τα
)
f+α (x0, tn)
+τα
(
−e−∆t/τα(∆t + 2τα)− ∆t + 2τα
) (
aLH[u] + aR(1 − H[u]))
u f+α (x0, tn)
+τα
(
−e−∆t/τα(∆t + 2τα)− ∆t + 2τα
)
(bv + cw) f+α (x0, tn)
+(
−τ2α e−∆t/τα + ∆t2/2 − τα∆t + τ2
α
)
A f+α (x0, tn)
+τα
(
1 − e−∆t/τα
) (
f Lα (x0, tn)H[u] + f R
α (x0, tn)(1 − H[u]))
+τα
(
e−∆t/τα(∆t + τα)− τα
)
u ·(
∂ f Lα (t
n)
∂xH[u] +
∂ f Rα (t
n)
∂x(1 − H[u])
)
.
(3.20)
The preparation of initial conditions f L,Rα (tn), ∂ f L,R
α (tn)/∂x is the same as the single
component formulation.
f+α (x0, tn) and τα = τα(x0, tn) can be fully determined by the macroscopic quantities
of all components. For individual component α, Wα(x0, tn) are calculated from
Wα(x0, tn) =∫
ψ(
f Lα (x0, tn)H[u] + f R
α (x0, tn)(1 − H[u]))
du. (3.21)
After the macroscopic quantities for all components are known, the transformation
(W1(x0, tn), ..., WN(x0, tn)) → (W∗1(x0, tn), ..., W∗
N(x0, tn)) are calculated from by Eq.(3.15),
thus f+α (x0, tn) is fully determined. And (W1(x0, tn), ..., WN(x0, tn)) → (τ1, ..., τN) are
calculated from Eq.(3.16).
The coefficients aL,R, b, c, A are calculated from the derivatives of W∗α(x0). The ap-
proximation of the spatial derivative is the same as that in the single component
formulation, for example,
(
∂W∗(L,R)α (tn)
∂x
)
x=x0
=W
∗(L,R)α (x0, tn)− W∗
α(xL,R, tn)
(x0 − xL,R) · n. (3.22)
And the time derivative is calculated from
(
∂W∗α(x0)
∂t
)
t=tn
= −∫
(
(aLH[u] + aR(1 − H[u]))u + bv + cw)
f+α (x0, tn)ψdu. (3.23)
45

3.3 Numerical Examples
3.3.1 Shock Structure
Consider a binary gas mixture with components A and B of mass mA, mB and di-
ameter dA, dB that forms a normal shock. The upstream component concentrations,
number densities, velocity, and temperature are denoted by χA,B1 , nA,B
1 , U1, T1, and the
corresponding downstream ones are χA,B2 , nA,B
2 , U2, T2, where χA,B = nA,B/(nA + nB).
The Mach number of the shock is then defined by
Ma =U
(γkBT/m)1/2, (3.24)
where m = mAχA + mBχB. For each component, the Rankine-Hugoniot condition
holds, so the upstream and downstream conditions are related through
Ma2 =
√
Ma21(γ − 1) + 2
2γMa21 − (γ − 1)
, (3.25)
χA,B2 = χA,B
1 , (3.26)
nA2
nA1
=nB
2
nB1
=(γ + 1)Ma2
1
(γ − 1)Ma21 + 2
, (3.27)
U2
U1=
Ma21(γ − 1) + 2
Ma21(γ + 1)
, (3.28)
T2
T1=
(2 + (γ − 1)Ma21)(2γMa2
1 − γ + 1)
Ma21(γ + 1)2
. (3.29)
The gas is assumed to be hard sphere argon gas, and the reference mean free path is
defined by
λ∞ =1√
2πd2An1
. (3.30)
In the simulation, the physical space is in the domain x ∈ [−25λ∞, 25λ∞], which
is discretized by 100 cells. The velocity space range is [−8√
2kBT1/m, 8√
2kBT1/m],
which is discretized by 101 points. The CFL number in all cases is 0.95. The origin of
the figures is determined by requiring n(0) = (n1 + n2)/2. And the simulation results
are presented in non-dimensional form,
nA,B =nA,B − nA,B
1
nA,B2 − nA,B
1
, TA,B =TA,B − T1
T2 − T1. (3.31)
46

A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
Figure 3.1: Shock structure in binary gas mixture: number densities nA,B and
temperatures TA,B for Ma1 = 1.5, mass ratio mB/mA = 0.5, and diameter ratio
dB/dA = 1 under different χB1 , and the reference solutions [66]. The solid lines are
profiles of A component, and the dashed lines are profiles of B component from
UGKS. The square symbols are profiles of A component, and triangle symbols are
profiles of B component from the reference.
The hat will be dropped in the figures for simplicity.
The number densities and temperatures of each component under different Mach
numbers and concentrations are shown in Figure 3.1, Figure 3.2, and Figure 3.3. And
the simulation results are compared with the Boltzmann solution [66]. As shown in
Figure 3.1 and Figure 3.2 for Ma = 1.5, the solutions from current scheme show good
agreement with the reference in both number density and temperature profiles under
different mass ratios. In Figure 3.2 for Ma = 1.5, mB/mA = 0.25, and χB1 = 0.1, the
temperature profile of light component B slightly deviates from the reference. For
Ma = 3.0 shown in Figure 3.3, the number density profile is still good, while the
temperature profiles of UGKS arises earlier, especially the light component B. It is
also observed in the single component simulation [67] but is severer in the multi-
component case. The deviation of temperature profile before the shock is partially
due to the incorrect transport coefficient produced by the model. Since the light
component is more likely to be influenced for the same amount of momentum and
energy transfer, it’s more sensitive to the transport coefficient.
47

A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
Figure 3.2: Shock structure in binary gas mixture: number densities nA,B and
temperatures TA,B for Ma1 = 1.5, mass ratio mB/mA = 0.25, and diameter ratio
dB/dA = 1 under different χB1 , and the reference solutions [66]. The solid lines are
profiles of A component, and the dashed lines are profiles of B component from
UGKS. The square symbols are profiles of A component, and triangle symbols are
profiles of B component from the reference.
A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
A (UGKS)B (UGKS)A (Boltzmann)B (Boltzmann)
Figure 3.3: Shock structure in binary gas mixture: number densities nA,B and
temperatures TA,B for Ma1 = 3.0, mass ratio mB/mA = 0.5, and diameter ratio
dB/dA = 1 under different χB1 , and the reference solutions [66]. The solid lines are
profiles of A component, and the dashed lines are profiles of B component from
UGKS. The square symbols are profiles of A component, and triangle symbols are
profiles of B component from the reference.
48

−H/2
H/2
p0(1 + Cpx/H)
T0(1 + CTx/H)
χA0+ Cχx/H
Figure 3.4: Micro-channel flow of binary gas mixture: schematic of the problem.
3.3.2 Micro-channel
Figure 3.4 shows the schematic of the problem. A long channel is formed by two par-
allel plates in x direction and has height H in y direction. A binary gas mixture with
components A and B of mass mA, mB and diameter dA, dB in the channel has uniform
pressure gradient, temperature gradient, or concentration gradient in x direction, i.e.
p = p0(1 + Cpx/H), T = T0(1 + CTx/H) or χA = χA0 + Cχx/H. The plates are as-
sumed to be fully diffusive and have temperature gradient T = T0(1 + CTx/H). The
inlet and outlet are imposed with pressure boundary conditions based on character-
istics as described in section.2.2.6. The gas is assumed to be hard sphere gas, and the
Knudsen number is defined by
Kn =λ0
H, λ0 = 1/(
√2πn0d2
A), (3.32)
where n0 is the number density at the inlet. In the simulation, the channel with
pressure gradient, temperature gradient, or concentration gradient are considered
separately. If CT and Cχ are zero, the non-dimensional particle flux of each component
due to pressure gradient is defined by [68]
MA,Bp =
1
Cp
∫ 1/2
−1/2
UA,B
√2kBT0/mA
d(y/H). (3.33)
MA,BT and MA,B
χ follow similar formula.
In our simulation, the channel has a length/height ratio equal to 40 and the gradients
Cp, CT, Cχ are kept very small. The simulation results are compared with the work of
Kosuge [68], where the McCormack model [69] for linearized Boltzmann equation is
used under the assumption of small Cp, CT, and Cχ.
Figure 3.5, Figure 3.6 and Figure 3.7 show the particle fluxes due to pressure gra-
dient, temperature gradient, and concentration gradient vs Knudsen number under
49

A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(a) Mαp
A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(b) MαT
(current)
(current)
(linearized Boltzmann)
(linearized Boltzmann)
(c) −χA0 MA
χ and χB0 MB
χ
Figure 3.5: Micro-channel flow of binary gas mixture: particle fluxes due to pressure
gradient, temperature gradient, and concentration gradient vs Knudsen number for
mB/mA = 2, dB/dA = 1, and χA0 = 0.5. The square symbols are profiles of A
component, and triangle symbols are profiles of B component from UGKS
simulation. The solid lines are profiles of A component, and dashed lines are profiles
of B component from the reference [68].
50

A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(a) Mαp
A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(b) MαT
(current)
(current)
(linearized Boltzmann)
(linearized Boltzmann)
(c) MαT
Figure 3.6: Micro-channel flow of binary gas mixture: particle fluxes due to pressure
gradient, temperature gradient, and concentration gradient vs Knudsen number for
mB/mA = 4, dB/dA = 1, and χA0 = 0.5. The square symbols are profiles of A
component, and triangle symbols are profiles of B component from UGKS
simulation. The solid lines are profiles of A component, and dashed lines are profiles
of B component from the reference [68].
51

A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(a) Mαp
A (current)
B (current)
A (linearized Boltzmann)
B (linearized Boltzmann)
(b) MαT
(current)
(current)
(linearized Boltzmann)
(linearized Boltzmann)
(c) MαT
Figure 3.7: Micro-channel flow of binary gas mixture: particle fluxes due to pressure
gradient, temperature gradient, and concentration gradient vs Knudsen number for
mB/mA = 10, dB/dA = 1, and χA0 = 0.5. The square symbols are profiles of A
component, and triangle symbols are profiles of B component from UGKS
simulation. The solid lines are profiles of A component, and dashed lines are profiles
of B component from the reference [68].
52

three different molecular mass ratios mB/mA = 2, 4, 10. From the figures of particle
fluxes due to pressure gradient, it can be seen that the overall agreement with the
reference solution is good for all mass ratios. Around Kn ≈ 1, Mp takes a minimum
value. This is called Knudsen minimum which is well known for pressure-driven
Poiseuille flow in rarefied gas. The figures of particle fluxes due to temperature gra-
dient show that the profile of heavy component B matches with the reference solution
quite well, but the profile of light component A deviates in the transition regime.
One reason for the disparity in temperature induced flow rate may come from the
discrepancy in transport coefficients from different models, and the light component
is more sensitive to it. Other factors may also have some impact on MT. Since it is
calculated from thermal-creep flow in the open channel, the pressure at the inlet and
outlet may not exactly keep its prescribed value. From the figures of particle fluxes
due to concentration gradient, the profiles of both components have good agreement
with the reference solution for all mass ratios. The particle flux of A component is in
the negative direction due to the increasing of concentration and the particle flux of B
component is in the positive direction due to the decreasing of concentration. In the
profile of Mp, MT, and Mχ, the values of A, B components have the largest difference
at the free molecular limit, then the difference reduces as the Knudsen number de-
creases and finally becomes zero at the continuum limit. This can be explained from
the fact that MA,Bp,T ∼ UA,B as shown in Eq.(3.33). In the high Knudsen number case,
UA and UB may have large difference due the insufficient collisions. In the continuum
limit, UA and UB tend to have the same value due to intensive collisions.
3.4 Conclusion
In this chapter, a brief introduction of the Boltzmann equation for multi-component
gas is given and the model equations for multi-component gas are briefly reviewed
and compared. Then a unified gas-kinetic scheme for multi-component gas based on
a single-BGK-operator model — the AAP model — is constructed.
In order to validate current scheme, simulations are performed for the shock struc-
ture problems under different Mach numbers and component concentrations, and the
micro-channel flow driven by small pressure gradient, temperature gradient, and con-
53

centration gradient under different molecular mass ratios. Good agreement with the
reference solution is obtained at moderate Knudsen numbers and mass ratios. There
are some deviations in the temperature profile of shock structure at high Mach num-
bers, and in the particle fluxes due to the temperature gradient in micro-channels, es-
pecially the light component. It may be caused by the transport coefficients, which are
not fully accurate from the current kinetic model, except in case of Maxwell molecules
[57]. And the light component is more sensitive to it. However, theoretically different
kinetic models, other than the current AAP, can be employed in the UGKS as well.
Future improvements may include the implicit evaluation of the source term in macro-
scopic equations, the enforcement of the conservation of macroscopic equations for
mixtures properties, and the recovering of accurate transport coefficients, such as the
adoption of the ellipsoidal models [64, 63].
54

Chapter 4
Sound-wave Propagation in Monatomic Gas
4.1 Introduction
In continuum flow regime, the sound propagation in gas can be described by the
Navier-Stokes equations. However, as Knudsen number increases to the transition
regime, the sound wave parameters, i.e., phase speed and attenuation coefficient,
deviate from the classical prediction. Most existing hydrodynamic equations fail to
describe the ultrasound propagation since the period of the sound wave propaga-
tion becomes comparable with the particle collision time. In order to investigate the
high frequency sound wave propagation, many researchers turned attention to the
kinetic equations by means of theories based on the expansion of Boltzmann equa-
tion. Wang Chang and Uhlenbeck [70] utilized the Super-Burnett equations, which
were then extended by Pekeris et al. [71] up to 483 moments. However, the suc-
cess of these theories cannot be extended to high Knudsen number flow regime. A
remarkable success that performs well for a wide range of Knudsen numbers is the
work of Sirovich and Thurber [72], and also Buckner and Ferziger [73]. Sirvoich
and Thurber used Gross-Jackson model and analyzed the dispersion relation, where
Buckner and Ferziger solved the half-space problem by means of elementary solu-
tions, with diffusely-reflecting boundary. Besides the Gross-Jackson model, another
popular kinetic model used for the study of sound wave is the BGK model. Thomas
and Siewert [74] and Loyalka and Cheng [75] adopted the BGK model and solved
the problem in half-space together with diffusely-reflecting boundary. Their results
agreed with each other. Another successful method in simulating ultrasound wave
propagation is the DSMC method [76]. In this thesis, the simulation is performed by
UGKS and the solutions are compared with experimental results of Greenspan [77]
55

L
transducer (diffusive)
U = U0 cos(ωt), T = T0
receiver (specular)
ρ0, T0
Figure 4.1: Sound-wave propagation: schematic of the problem.
and Meyer and Sessler [78], and the DSMC results of Hadjiconstantinou and Garcia
[76].
Figure 4.1 shows the schematic of the simulation geometry. The monatomic gas ini-
tially at rest with ρ0, T0 is enclosed between two solid surfaces separated by a dis-
tance L. The left surface is the transducer which is imposed by a periodical velocity
U(t) = U0 cos ωt, and the particles are diffusely reflected from the surface. On the
other hand, the right surface is a stationary receiver and the particles are specularly
reflected, which leads to total reflection of the propagating waves. The flow field is
assumed to be one-dimensional. There are two relevant Knudsen numbers for this
problem, one is defined as the ratio of mean free path λ to the domain length L, and
the other is the ratio of wave frequency ω to particle collision frequency 1/τ,
KnL =λ
L, Knω = ωτ, (4.1)
where λ is the particle mean free path, L is the domain length, ω is the angular
frequency of wave.
4.2 Methodology
4.2.1 Boundary Condition at the Transducer
In our simulation, the boundary treatment at the transducer is different from the
Maxwellian reservoir method used by Hadjiconstantinou and Garcia in their DSMC
simulation [76]. Following Loyalka and Cheng and others [79, 75], the Maxwellian
56

distribution at the transducer is
gw = ρw
(
m
2πkBT0
)3/2
exp
(
− m
2kBT0((u − U0 cos ωt)2 + v2 + w2)
)
, u > 0, (4.2)
The density ρw at the transducer is determined by
∫ tn+1
tn
∫
u>0(u − U0 cos ωt)gwdudt +
∫ tn+1
tn
∫
u≤0(u − U0 cos ωt) findudt = 0, (4.3)
where fin is the distribution function of particles impinging on the transducer. The
fluxes are then
F = S∫ tn+1
tnu(gwH[u] + fin(1 − H[u]))dt, F =
∫
ψFdu. (4.4)
The effect of different boundary treatment on the solution will be discussed later.
4.2.2 Method for Determining Sound Parameters
In the experiment, one measures the pressure signal at the receiver and assumes that
the pressure is a single damped wave of the form
p(x, t) = A exp(i(ωt − kx + ϕ)− αx), (4.5)
where A is amplitude, k is wave number, α is attenuation coefficient, and ϕ is phase
shift. Linear fits are performed in logarithm plots of amplitude and phase over a range
of distances between the transducer and receiver in order to determine the parameters
in the above equation.
In our simulation, the flow variables in the whole domain is obtained in each com-
putation, which enables us to extract the sound parameters without changing the
domain length. Similar to the method used by Hadjiconstantinou and Garcia [76], the
wave can be expressed as
U = A(x) cos ωt + B(x) sin ωt, (4.6)
and a least-square method is used to extract A(x) and B(x) from the numerical so-
lution after the initial transients (approximately after 60 periods), which are given by
A(xj) =∑i sin2 ωti ∑i U(xj, ti) cos ωti − ∑i sin ωti cos ωti ∑i U(xj, ti) sin ωti
∑i cos2 ωti ∑i sin2 ωti − (∑i sin ωti cos ωti)2,
B(xj) =∑i cos2 ωti ∑i U(xj, ti) sin ωti − ∑i sin ωti cos ωti ∑i U(xj, ti) cos ωti
∑i cos2 ωti ∑i sin2 ωti − (∑i sin ωti cos ωti)2,
(4.7)
57

with xj being the x coordinate of cell center and ti being the time to do the sampling.
Then the amplitude can be calculated by√
A(x)2 + B(x)2. If we further assume the
wave propagating in the positive direction as
Um exp(i(ωt − kx + ϕ)− αx), (4.8)
and the reflected wave as
−Um exp(i(ωt + k(x − 2L) + ϕ) + α(x − 2L)), (4.9)
the superposition leads to
U =Um exp(−αx) cos(ωt − kx + ϕ)
−Um exp(α(x − 2L)) cos(ωt + k(x − 2L) + ϕ).
(4.10)
Combining Eq.4.6 with Eq.4.10 gives,
A(x) = Um exp(−αx) cos(kx − ϕ)− Um exp(α(x − 2L)) cos(k(x − 2L) + ϕ), (4.11)
and
B(x) = Um exp(−αx) sin(kx − ϕ) + Um exp(α(x − 2L)) sin(k(x − 2L) + ϕ). (4.12)
In the above formulas, Um, ϕ, α, k are unknowns, and are obtained by parameter esti-
mation using the Nelder-Mead simplex method, which is available in most mathemat-
ical softwares. The formula used by Hadjiconstantinou and Garcia is a little different
from Eq.4.10. They simplified the expression under the condition L = (7/4)l, where l
is the wavelength.
In low frequencies, the estimation of wave parameters are based on the amplitude
√
A(x)2 + B(x)2 = Um
√
4e−2Lα(cosh(2α(x − L))− cos(2k(L − x))). (4.13)
However, in high frequencies, the reflected wave is very weak in comparison with
incoming one and the amplitude approximately takes the following form,
Um exp(−αx). (4.14)
The information of phase speed is lost in the expression of the above amplitude, and
the estimation of wave parameters for high frequency wave is directly based on both
A(x) and B(x) in Eq.4.11 and Eq.4.12. According to the analysis in [80], the wave
58

is composed of several modes in low frequencies, instead of one mode described by
Eq.4.10. Within all transport modes, the so-called acoustic mode dominates the trans-
port, and the other modes get damped quickly. By excluding the region near to the
transducer, the formula fitted result using Eq.4.13 is actually the acoustic mode in low
frequencies (shown in next section). In high frequencies, however, the sound param-
eters show an increasing dependence on the location, which was observed in other
numerical computations [76, 75, 74] and was analyzed in free-molecular limit [81].
Under this condition, Eq.4.5 and Eq.4.10 are not applicable for high-frequency waves
in the whole domain. Since all experimental measurements do not include the infor-
mation about the region where the sound parameters are measured, we determine the
numerical region for estimating wave parameters by gradually excluding the region
near the transducer until the best fit for the rest of the domain is obtained.
In latter sections, A(x), B(x), and the amplitude calculated directly from the sampling
by Eq.(4.7) are referred as the simulated results, A(x), B(x), and the amplitude ob-
tained by Eq.(4.11), Eq.(4.12), and Eq.(4.13) after the parameter estimation are referred
as the formula fitted results.
4.3 Numerical Results
The simulation is performed with Shakhov model and the gas is assumed to be hard
sphere monatomic. The results are presented in non-dimensional form,
t =t
τ0, u =
u
(kBT0/m)1/2, x =
x
L∞, (4.15)
where L∞ = µ0(kBT0/m)1/2/p0.
For hard-sphere molecule, the particle mean free path is λ0 = (√
2/π)(8/5)L∞, and
the two relevant Knudsen numbers are
KnL =λ0
L=
√
2
π
8
5
1
L, Knω = ωτ0 = ω. (4.16)
The dimensionless form of classical sound speed at rest state is C0 = C0/(kBT0/m)1/2 =√
γ. For monatomic gases, C0 =√
5/3. In latter sections, the hat will be dropped for
simplicity.
59

Table 4.1: Sound wave propagation: frequencies and domain lengths.
ω 0.08 0.1 0.2 0.25 0.4 1.0 2.0
L 175.0 140.0 70.0 58.0 38.0 16.0 8.5
ω 2.5 3.2 4.0 5.0 8.0 16.0 32.0
L 7.0 6.0 5.5 4.5 3.55 2.0 1.0
We have performed simulation for a wide range of frequencies from ω = 0.08 to
ω = 32. Based on Eq.4.16, the corresponding Knudsen number Knω ranges from 0.08
to 32. The domain length L is chosen to be no more than a few wave lengths, which
is approximately L ≈ (7/4)l. The wave frequencies and domain lengths are listed in
Table 4.1. Based on Eq.4.16, the Knudsen number KnL changes from 0.007 to 1.28.
In order to avoid nonlinear effect, such as shock formation in the wave propagation,
the requirementρ0U0C0
ωµ0≪ 1, (4.17)
should be met. The requirement can be written as U0 ≪ ω/√
γ. For frequencies
ω ≤ 0.25, we use U0 = 0.005; for 0.4 ≤ ω ≤ 2.5, we use U0 = 0.01; and for even
higher frequencies, we use U0 = 0.02. To capture the wave profile accurately, we use
140 cells in most cases, which is approximately 80 cells per wavelength. For ω = 8.0,
70 cells are used. For extremely high frequencies ω = 16.0, 32.0, only 35 cells are
used. The time step is determined by the CFL condition, and it also satisfies the
requirement,
∆t <1
60(2π/ω), (4.18)
in order to accurately capture the time evolution of the wave profile.
The time to start sampling is determined by setting a monitor point, where the veloc-
ities at each moment of integer period, i.e., at time t = N(2π/ω) with N = 1, 2, 3, ...,
are recorded. When the changing of velocities becomes substantially small, we start
the sampling. Figure 4.2 shows the velocity change at the monitor point for ω = 0.1.
To extract A(x) and B(x), we start sampling from 100 periods to 110 periods, with
100 time samples in each period. Figure 4.3 shows A(x) and B(x) for ω = 0.1.
60

0 20 40 60 80 100
Period
0.0015
0.0020
0.0025
0.0030
0.0035
0.0040
0.0045
0.0050
Vel
oci
ty
ω = 0.1
Figure 4.2: Sound wave propagation: velocity change on every integer period at the
monitor point for frequency ω = 0.1.
4.3.1 Behavior at Low Frequencies
In low frequencies, the estimation of wave parameters is based on the amplitude def-
inition in Eq.4.13. Figure 4.4 shows the amplitude obtained by direct sampling from
Eq.(4.7) (simulated results), and the amplitude obtained by Eq.(4.11) and Eq.(4.12)
after parameter estimation (formula fitted results) at ω = 0.1 from the UGKS simu-
lation. In order to validate our result, the re-scaled analytic solution of Regularized
13-moments (R13) equation [80] is also included for comparison. To have a real com-
parison with the R13 result, the same isothermal wall boundary condition as R13 is
used in our simulation. Since ω = 0.1 is a relative low frequency, the R13 result
should be reliable even though it does not work properly for high frequency wave.
The above comparison confirms that by excluding the region near to the transducer,
the fitted amplitude using Eq.4.13 recovers the acoustic mode.
4.3.2 Behavior at High Frequencies
Figure 4.5 shows A(x) and B(x) for Re = γ/ω = 0.5 (ω ≈ 3.3) using the UGKS and
the DSMC data, with the same boundary condition (Maxwellian reservoir method).
61

0 20 40 60 80 100 120 140
X
−0.006
−0.004
−0.002
0.000
0.002
0.004
0.006
A(x),
B(x)
A(x)B(x)
Figure 4.3: Sound wave propagation: A(x) and B(x) for frequency ω = 0.1.
0 20 40 60 80 100 120 140
X
0.000
0.001
0.002
0.003
0.004
0.005
Vel
oci
tyA
mpli
tude
ω = 0.1
R13R13-acoustic modeUGKS-simulationUGKS-fitting
Figure 4.4: Sound wave propagation: simulated amplitude (from direct sampling)
and formula fitted amplitude (from the assumed wave form after parameter
estimation) for UGKS results and the theoretical solutions of R13 [80] at ω = 0.1.
62

0 1 2 3 4 5 6
X
−0.06
−0.04
−0.02
0.00
0.02
0.04
0.06
0.08
A(x),
B(x)
A(x)-DSMC
B(x)-DSMC
A(x)-UGKS
B(x)-UGKS
Figure 4.5: Sound wave propagation: comparison of UGKS and DSMC results using
the same boundary condition at Re = γ/ω = 0.5 (ω ≈ 3.3).
The results are almost the same from two different methods, and the estimated wave
parameters only have a slight difference from that obtained by the boundary treatment
in Eq.4.2 and Eq.4.3. Since Knω = ω ≈ 3.3 is a pretty large Knudsen number, the
perfect match between UGKS and DSMC solution confirms the accuracy of the UGKS
method in capturing non-equilibrium flow.
In high frequencies, the estimation of wave parameters are based on both A(x) and
B(x) presented in Eq.4.11 and Eq.4.12, and the region used for fitting is determined
by gradually excluding the region near the transducer until the best fit for the rest
domain is obtained. Figure 4.6 shows one of the fitted result of A(x), B(x) at ω = 5
by matching the numerical solutions with the analytical ones in Eq.4.11 and Eq.4.12,
and the corresponding velocity amplitude.
The location dependent behavior of phase speed and attenuation coefficient in high
frequencies can be observed by changing the region used for fitting. Figure 4.7 shows
the fitted phase speed starting from different locations xmin for ω = 5. The fitted
result in Figure 4.6 is based on the sampling point starting from xmin ≈ 1.54. In high
frequency case, the point-wise definition of wave parameters used by Schotter [82],
Garcia and Siewert [79], and Sharipov [81], may be another choice for their evaluation.
63

Figure 4.6: Sound wave propagation: simulated results (from direct sampling) and
formula fitted results (from the assumed wave form after parameter estimation) at
ω = 5.
4.3.3 Phase Speed and Attenuation Coefficient
The extracted phase speed and attenuation coefficient are listed in Table 4.2. The
comparison among the experiments, DSMC [76], Navier-Stokes solutions, and the
UGKS results are presented in Figure 4.8 and Figure 4.9, respectively.
It is obvious that the UGKS results have a good agreement with the experimental data.
Although the boundary treatment and numerical method used in our simulation are
different from that in DSMC calculation, the main difference in the UGKS and the
DSMC results does not come from them, but the region used for fitting the numerical
solution by the formula. The DSMC simulation fixed the starting location for fitting
at xmin = λ or xmin = 0.5λ. If the same fitting location is used, it is expected to obtain
similar results for both UGKS and DSMC methods.
The UGKS results are also compared with the original experimental data presented by
Greenspan [77] and Meyer [78] in Figure 4.10 and Figure 4.11. It can be seen that the
current results have good agreement with the experimental data in general, especially
in the continuum regime and free-molecular regime. In regime 2 ≤ ω ≤ 4, the phase
speed have a slightly overshot. This overshot is also observed in other computations
[73, 76, 75, 74].
64

0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Xmin
0.0
0.2
0.4
0.6
0.8
1.0
k/k0
Figure 4.7: Sound wave propagation: location dependent phase speed for frequency
ω = 5.
Table 4.2: Sound wave propagation: wave speed and attenuation coefficient at
different frequencies.
ω 0.08 0.1 0.2 0.25 0.4
k 6.160E-02 7.667E-02 1.495E-01 1.839E-01 2.810E-01
α 3.310E-03 5.236E-03 1.953E-02 2.874E-02 6.287E-02
ω 1.0 2.0 2.5 3.2 4.0
k 5.929E-01 1.023E+00 1.220E+00 1.442E+00 1.713E+00
α 2.287E-01 4.846E-01 5.989E-01 7.527E-01 9.136E-01
ω 5.0 8.0 16.0 32.0
k 2.028E+00 3.134E+00 6.159E+00 1.214E+01
α 1.109E+00 1.646E+00 2.983E+00 5.777E+00
65

10−1 100 101 102
Re= γ/ω
0.0
0.2
0.4
0.6
0.8
1.0
k/ k0
Navier-Stokes
DSMC(xmin =λ)
DSMC(xmin = 0.5λ)
Experiment(Greenspan)
Experiment(Meyer)
UGKS
Figure 4.8: Sound wave propagation: phase speed comparison at different
frequencies among the results from UGKS, DSMC [76], experimental measurements,
and Navier-Stokes equations.
10−1 100 101 102
Re= γ/ω
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
/ k0
Navier-Stokes
DSMC(xmin =λ)
DSMC(xmin = 0.5λ)
Experiment(Greenspan)
Experiment(Meyer)
UGKS
Figure 4.9: Sound wave propagation: attenuation coefficient comparison at different
frequencies among the results from UGKS, DSMC [76], experimental measurements,
and Navier-Stokes equations.
66

100 101 102
r = 1/ω
100
k/ k0
(a). Phase speed
Navier-Stokes
Experiment(Greenspan)
UGKS
100 101
r = 1/ω
10−1
/ k0
(b). Attenuation coeff cient
Navier-Stokes
Experiment(Greenspan)
UGKS
Figure 4.10: Sound wave propagation: wave speed and attenuation coefficient
comparison between UGKS and experimental data of Greenspan [77].
67

10−2 10−1 100 101 102
r = 1/ω
0.2500
0.4375
0.6250
0.8125
1.0000
k/ k0
(a). Phase speed
Navier-Stokes
Experiment(Meyer)
UGKS
10−2 10−1 100 101
r = 1/ω
10−1
/ k0
(b). Attenuation coeff cient
Navier-Stokes
Experiment(Meyer)
UGKS
Figure 4.11: Sound wave propagation: wave speed and attenuation coefficient
comparison between UGKS and experimental data of Meyer [78].
68

4.4 Conclusion
In this chapter, the sound wave propagation in monatomic gases is simulated with
hard-sphere molecule for the whole Knudsen regime, and the phase speed and at-
tenuation coefficient are obtained. The good agreement between the UGKS results
and the experimental data is another validation of the UGKS method in capturing the
physical solutions for non-equilibrium flows.
There are several differences between the UGKS and the DSMC method for the sound
wave simulation. First, the boundary treatment of the transducer in our simulation
is different with the Maxwellian reservoir method used by the DSMC method [76].
However, as shown in this paper, different boundary treatments only have marginal
effect on the evaluation of phase speed and attenuation coefficient. Second, the hard-
sphere molecule is used in our simulation, which corresponds to µ ∝√
T. We can eas-
ily extend the UGKS method to simulate any viscosity law, such as the Sutherland’s
law. For the DSMC method, it is not straightforward to incorporate any general vis-
cosity laws, except the hard-sphere and variable hard-sphere models. By contrast, the
viscosity coefficient in UGKS can be directly implemented through the determination
of the local particle collision time.
The wave propagation in high frequencies/high Knudsen number flow is quite differ-
ent from the classical sound wave propagating results. With the dependence of phase
speed and attenuation coefficient on the location for their evaluation, the wave behav-
ior deviates from its classical form, and cannot be described by Eq.4.5 and Eq.4.10. A
point-wise definition [79, 82, 81] of phase speed and attenuation coefficient may be
another choice for their evaluation.
69

Chapter 5
Cross-coupling of Mass and Heat Transfer
5.1 Introduction
Onsager’s reciprocal relations for linear irreversible processes [83, 84] play an im-
portant role in the theory of non-equilibrium thermodynamics. In a thermodynamic
process, the entropy production rate can be expressed by
dS
dt=
N
∑i=1
JiXi, (5.1)
where S is entropy, Ji are thermodynamic fluxes, and Xi are the conjugate thermo-
dynamic forces. For small deviation away from the equilibrium, we have the linear
response expressed by
Ji =N
∑j=1
LijXj, (5.2)
where Lij are the kinetic coefficients. Onsager’s reciprocal relation states that
Lij = Lji, (5.3)
as a consequence of microscopic reversibility.
Starting from the Gibbs equation, the thermodynamics fluxes and forces can be iden-
tified for gas flows, and constitutive equations can be derived. In multi-component
gas, the Onsager reciprocal relation shows up in the diffusion coefficients between
two components and the coupling of diffusion-thermal and thermal-diffusion coeffi-
cient for each component. The cross effects of thermal-diffusion and diffusion-thermal
are also called the Soret effect and Dufour effect [56]. In single-component gas, the
Onsager reciprocal relation shows up in the cross coupling of thermal-osmosis and
70

mechano-caloric effect of rarefied gas in system not far away from equilibrium. This
provides an interesting case and was studied by various authors. Groot and Mazur
[85] as well as Waldmann [86] studied the coupling phenomena in parallel planner
channel in both free molecular and slip regime (0.001 ≤ Kn ≤ 0.1). Loyalka [87, 88]
and Sharipov [89] analyzed the cross effect by means of the linearized Boltzmann
method and obtained the coupling coefficients numerically. Although the theoretical
analysis of Loyalka [87] is valid for capillary of arbitrary shape, most of the work,
especially the numerical calculations [88, 52], were devoted to capillary of planner
surfaces or circular cross sections. The thermal-osmosis effect attracts much more at-
tention since it can be used to design pumping devices without any moving part, i.e.
the Knudsen pump [17]. Despite the proposed Knudsen pump [17, 90], capillary with
ratchet surfaces has the potential for another possible configuration [91]. The driving
mechanism of such system has been analyzed by Wüger [91] as well as Hardt et al.
[92], and the mass and momentum transfer is studied by Donkov et al. [93].
In this chapter, we will study the cross coupling phenomena for a long capillary of
both planner and ratchet surfaces by unified gas-kinetic scheme. The mechanism of
cross coupling for both cases are presented. The coupling coefficients for planner sur-
faces are numerically calculated and compared with the literature. And the coupling
coefficients for ratchet surfaces are presented and analyzed. A preliminary geometry
optimization for use as Knudsen pump is also included.
5.2 Mechanism
5.2.1 Micro-channel of Planner Surfaces
The schematic of cross coupling in channel of planner surfaces is shown in Figure 5.1.
A long channel is confined by two parallel solid plates of distance H and connected to
two reservoirs. The left reservoir is maintained at pressure p0 −∆p/2 and temperature
T0 − ∆T/2. The right reservoir is maintained at p0 + ∆p/2 and T0 + ∆T/2. ∆p < 0
and ∆T > 0 are used in the simulation, where |∆p/p0| ≪ 1 and |∆T/T0| ≪ 1 to
ensure linear response. Typically, a mass flux to the right is generated by the pressure
gradient and a heat flux to the left is generated by the temperature gradient. For
71

p0 −∆p/2
T0 −∆T/2
p0 +∆p/2
T0 +∆T/2mass flow
heat flow (∆p < 0)
(∆T > 0)H
L
Figure 5.1: Cross coupling in channel of planner surfaces: schematic of the problem.
rarefied gas, ∆p also contributes to the heat flux and ∆T contributes to the mass flux.
These cross-coupling effects are called mechano-caloric effect and thermo-osmosis
effect.
For single-component gas, the entropy production can be expressed by [86]
dS
dt= JE∆
(
1
T
)
+ JM∆(
− ν
T
)
, (5.4)
where ν is the chemical potential per unit mass, JE and JM are the energy flux and
mass flux from the left reservoir to right reservoir, and ∆ means the quantity at the
right reservoir minus the quantity at the left reservoir.
Here ν and JE can be written as
ν = h − Ts, (5.5)
JE = JQ + hJM, (5.6)
where s and h are the entropy and enthalpy per unit mass and JQ is the heat flux.
Together with the Gibbs-Duhem equation
dν = −sdT + dp/ρ, (5.7)
Eq.(5.4) becomesdS
dt= − 1
ρTJMdp − 1
T2JQdT. (5.8)
From Eq.(5.8), the thermodynamic forces and fluxes are connected as
JM
JQ
=
LMM LMQ
LQM LQQ
−T−10 ρ−1
0 ∆p
−T−20 ∆T
, (5.9)
and
LMQ = LQM, (5.10)
72

due to Onsager reciprocal relation. Note that JQ is measured at the outlet for a long
channel [94]. The detailed mechanism may vary under different configurations and
rarefactions.
For free molecular regime and specular reflection on plates, the molecules travel bal-
listically from on side to the other. And the distribution function at any point can be
treated as the combination of two half-space Maxwellians from the two reservoirs. The
kinetic coefficients can be calculated analytically in such case, as given by Waldmann
[86],
LMM LMQ
LQM LQQ
=1
4Hρ0T0
√
8kBT0
mπ
ρ0/p0 −1/2
−1/2 9p0/4ρ0
. (5.11)
If the temperature gradient is imposed on the plates and particles are diffusive re-
flected, the mass flux due to temperature gradient is generated by thermal creep on
the plates [85, 17, 5]. The kinetic coefficients for such system is calculated by several
authors with different methods [52]. Assuming the length to height ratio of the chan-
nel is fixed and noting that ρλ = constant, µ ∝ T1/2 for hard-sphere molecule, the
average velocity induced by thermal creep can be estimated from the Maxwell slip
boundary condition [5],
U ∼ µ0
ρ0T0∇T ∝
∆T√T0
Kn, (5.12)
where Kn = λ0/H. In later sections, we will show that LMQ = LQM holds for this
case and is an increasing function of Kn.
5.2.2 Micro-channel of Ratchet Surfaces
The mechanism in channel of ratchet surfaces is a little complex. Consider a long
channel consists of repeating structure similar to the reference [93] as shown in Figure
5.2, where the two ends are connected to two reservoirs with p0 − ∆p/2 (∆p < 0), T0
and p0 +∆p/2, T0 respectively. The upper wall (solid line colored in blue) are diffusive
and maintained at T0 + ∆T/2(∆T > 0), the lower inclined walls (solid lines colored
in blue) are diffusive and maintained at T0 − ∆T/2. And the lower horizontal and
vertical walls (dot-dashed lines colored in green) are specular. Typically, a mass flux
pointing to the right is generated by the pressure gradient and a heat flux pointing
to the bottom is generated by the temperature gradient. In rarefied gas, ∆p also
73

p0 −∆p/2
T0
p0 +∆p/2
T0
(∆p < 0)T0 +∆T/2 (∆T > 0)
T0 −∆T/2L
α
H
H0
H1
mass
heat
Figure 5.2: Cross coupling in channel of ratchet surfaces: schematic of the problem.
The upper wall and the lower inclined walls (solid lines colored in blue) are
diffusive. The lower horizontal and vertical walls (dot-dashed lines colored in green)
are specular.
contributes to the heat flux and ∆T contributes to the mass flux, where |∆p|/p0 ≪ 1
and |∆T|/T0 ≪ 1.
The thermodynamic forces and fluxes are connected as
JM
JQ
=
LMM LMQ
LQM LQQ
−T−10 ρ−1
0 ∆p
−T−20 ∆T
, (5.13)
where JQ is the normal heat flux at the solid surfaces. And
LMQ = LQM, (5.14)
due to Onsager reciprocal relation.
Since the upper wall and the lower inclined walls are maintained at different tem-
peratures, the isothermal lines near the tip (indicated by a dashed circle) are sharply
curved and thermal-edge flow is induced at the tip from top to bottom [17, 92]. The
non-parallel isothermal lines along the inclined walls also induce a thermal-stress
slip flow in the direction opposite to the thermal-edge flow, but it is not significant
if the Knudsen number is small [17, 92]. It’s possible to have a rough estimation of
the induced velocity at the tip [17, 91]. If all the walls are assumed diffusive, the
temperature gradient along the inclined wall near the tip is approximated by [91],
∇T|| = ∆Tπ2
(2π − α)2cos
(α
2
) H−π/(2π−α)
λ1−π/(2π−α)0
, (5.15)
where λ0 is the mean free path at p0, T0. Recalling ρλ = constant and µ ∝ T1/2 for
hard-sphere molecule, the induced velocity in slip regime can be estimated from the
74

formula for slip boundary condition [5],
U ∼ µ0
ρ0T0∇T|| ∝
∆T√T0
1
(2π − α)2cos
(α
2
)
(
λ0
H
)π/(2π−α)
. (5.16)
Since 0 ≤ α ≤ 2π and Kn = λ0/H < 1 in the slip regime, the induced velocity is
1. Proportional to ∆T.
2. Decreasing function of T0.
3. Decreasing function of α, since smaller α means sharper edges.
4. Increasing function of Kn, due to the stronger non-equilibrium effect.
However, U will decrease if Knudsen number excess certain values since the thermal-
induced flows are typically strongest in the lower transition regime [17]. Under cur-
rent configurations, the average velocity can be expressed by
U ∝ C1∆T√
T0KnC2 , (5.17)
where C1, C2 are some constants for a specific geometry.
5.3 Methodology
5.3.1 Normalization
The kinetic coefficients are calculated and presented in non-dimensional form as fol-
lows
LMM = LMM
(
2kB
mρ0C0H
)
,
LMQ = LMQ
(
2kB
mρ0C30 H
)
,
LQM = LQM
(
2kB
mρ0C30 H
)
,
LQQ = LQQ
(
2kB
mρ0C50 H
)
,
(5.18)
where ρ0, C0 = (2kBT0/m)1/2 are the reference state and H is the height of the channel
to define Knudsen number Kn = λ0/H. λ0 is the mean free path at reference state.
75

Since the density variation is small in the simulation, the mass flux can be expressed
by
JM ≈ ρ0UH. (5.19)
Further assume that there is no pressure difference, then
ρ0UH = LMQ
(
mρ0C30 H
2kB
)
∆T
T20
, (5.20)
or
U ∝ LMQ∆T√
T0. (5.21)
Comparing Eq.(5.21) with Eq.(5.12) and Eq.(5.17), LMQ is assumed to have the form
LMQ = C1KnC2 , (5.22)
where C1, C2 are some constants for a specific geometry and can be obtained by data
fitting of the simulated solution.
5.3.2 Data processing
Suppose a system has n kinds of driven forces, which generates n kinds of fluxes. The
forces and fluxes are related through
J1
...
Jn
=
L11 ... L1n
... ... ...
Ln1 ... Lnn
F1
...
Fn
or J = LF, (5.23)
where J and F are directly extracted from the simulation data, and the coefficients
L are unknowns to solve. For a single simulation, there are n equations and n × n
unknowns, so n sets of different simulation data are needed to solve L,
L =[
J1 ... Jn
] [
F1 ... Fn
]−1, (5.24)
provided that the matrix of F is invertible.
For the cross coupling considered here, this requires the simulations to be performed
twice with different ∆p and ∆T for a single system (same geometry and Knudsen
number) to determine all the kinetic coefficients.
76

Figure 5.3: Cross coupling in channel of planner surfaces: LMQ and LQM versus
Knudsen number. The reference is the S-model solution based on variational method
by Chernyak et al. [95].
5.4 Numerical Results
5.4.1 Cross-coupling for Planner Surfaces
Before proceeding to the ratchet surfaces, the kinetic coefficients are calculated for
channel with planner surfaces and compared with those in literature. The schematic
of the simulation geometry is shown in Figure 5.1. The solid surfaces are assumed to
be diffusive and have linearly distributed temperature from T0 − ∆T/2 to T0 + ∆T/2.
The gas is assumed to be hard-sphere and monatomic so that Pr = 2/3, µ ∝ T0.5.
The Knudsen number is defined as Kn = λ0/H and the mean free path is defined by
Eq.(2.21).
The simulation is performed with Shakhov model. ∆p and ∆T are kept small enough
so that the response of fluxes to forces is linear and the length/height ratio of the
channel is taken to be 20 in order to reduce the influence of inlet and outlet. When
extracting the coefficients, the pressure and temperature difference are measured from
77

Figure 5.4: Cross coupling in channel of ratchet surfaces: schematic of the simulation
geometry.
the inlet and outlet, the mass flux JM is averaged over the cross section at the inlet
and outlet, and the heat flux JQ is measured along the cross section in the middle of
the channel.
Figure 5.3 shows the normalized off-diagonal coefficients LMQ, LQM versus Knudsen
numbers. The coefficients are quite close to each other with a maximum difference
of 5%, and also have good agreement with the S-model solution based on variational
method by Chernyak et al. [95]. The normalized coefficients are zero at Kn = 0 since
there is no thermal-induced flow in the continuum limit and the heat flux follows
Fourier’s law. Then the normalized coefficients increases as the Knudsen number
becomes larger. The profiles are almost linear which means LMQ = LQM ∼ log(Kn).
And this agrees with the conclusion obtained from linearized Boltzmann equation for
two-dimensional infinitely long channel [7, 52].
5.4.2 Cross-coupling for Ratchet Surfaces
In the simulation, the channel is consisted by seven repeating blocks as shown in
Figure 5.2 where each one has L/H0 = 1, H = H1, and α = 45. And two parallel
sections with specular walls of length L are attached at two ends. The channel is
then connected to two reservoirs. The schematic of the whole system is shown in
Figure 5.4. The parallel specular wall sections are introduced to reduce the influence
of inlet/outlet to the ratchet sections and also simplifies the extraction of mass flux.
The gas is still assumed to be hard-sphere monatomic so that Pr = 2/3 and µ ∝ T0.5.
The Knudsen number is defined as Kn = λ0/H and the mean free path is defined by
Eq.(2.21). When extracting the coefficients, the pressure difference is measured from
the inlet and outlet, the mass flux JM is averaged over the cross sections at the inlet
and outlet , and JQ is integrated along all the inclined walls.
78

Figure 5.5: Cross coupling in channel of ratchet surfaces: LMQ and LQM versus
Knudsen number.
Figure 5.5 shows the normalized off-diagonal coefficients LMQ, LQM versus Knudsen
number. It can be seen that the two coefficients are quite close to each other with a
maximum difference of 2%, which indicates the relation LMQ = LQM is well satisfied.
The off-diagonal coefficients are zero at Kn = 0 since there is no thermal-induced
flow in continuum limit and the heat flux follows the Fourier’s law. As the Knudsen
number increases, the rarefied effects occurs at the sharp edge of the ratchet and
leads to an increasing of the normalized off-diagonal coefficients. Both LMQ and LQM
exhibits a maximum at Kn ≈ 0.28, which means the maximum average velocity is
achieved if ∆T and T0 are the same according to Eq.(5.21). This is consistent with the
observations in reference [93] for a similar ratchet geometry with periodic boundary
condition. The cross coupling effect arises from the thermal induced flow on the
rough surface, especially the sharp edge. As the Knudsen number becomes higher
than a certain value, the roughness can hardly be seen by the particles, thus the
coefficient gradually decreases.
Now we perform the data fitting of the simulated cross coupling coefficients by
Eq.(5.22). Since the formula is valid in the slip regime, two additional simulations
79

Figure 5.6: Cross coupling in channel of ratchet surfaces: formula fitted and
simulated LMQ.
are performed to obtain LMQ at Kn = 0.02 and Kn = 0.04, and only the first four
points are taken into consideration. The fitted coefficient is then
LMQ = 0.0483Kn0.562. (5.25)
Inserting α = π/4 into Eq.(5.16), one finds
U ∝ Kn0.571. (5.26)
This is very close to the fitted parameter in Eq.(5.25). Figure 5.6 shows the fitted
coefficients and the simulated coefficients as a function of Knudsen number.
5.5 Knudsen pump
Wüger [91] and Donkov et al. [93] proposed the capillary with ratchet surfaces as
another possible configuration for Knudsen pump. In this section, a preliminary
optimization is provided for this purpose. For simplicity and accuracy, only one block
as shown in Figure 5.2 is used and the inlet/outlet is replaced by periodic boundary
80

(a) Temperature contour and streamlines of
diffusive configuration where α = 0.
(b) Temperature contour and streamlines of a
typical diffusive-specular configuration.
Figure 5.7: Cross coupling in channel of ratchet surfaces: temperature contour and
streamlines of typical diffusive configuration and diffusive-specular configuration.
condition. The upper wall is still diffusive, but the lower walls have two different
configurations:
• All the lower walls are diffusive (will be referred as diffusive configuration).
• The vertical and horizontal lower walls are diffusive, and the inclined wall is
specular (will be referred as diffusive-specular configuration). This configura-
tion is the same as reference [93].
Figure 5.8 shows the LMQ as a function of tan α for L/H = 2, H1/H = 1, and
Kn = 0.28. The left figure is for diffusive configuration and the right figure is for
diffusive-specular configuration. In the diffusive configuration, thermal-edge flow
arises on both sides of the sharp edge and diminishes each other, thus the induced
velocity is reduced [92]. If α = 0, there will be zero net mass flow in the x direction,
and two identical vortices are formed between the ’needles’ as shown in Figure 5.7.
The optimized value of α occurs around tan α ≈ 1.25. In the diffusive-specular con-
figuration, thermal-edge flow occurs only on the diffusive surfaces, thus the induced
velocity is much higher than that in the diffusive configuration. The temperature con-
tour and streamlines of a typical diffusive-specular configuration is shown in Figure
5.7, and is very close to the result in reference [93]. And LMQ is an increasing function
of tan α in a diffusive-specular configuration.
81

(a) LMQ (diffusive) (b) LMQ (diffusive-specular)
Figure 5.8: Cross coupling in channel of ratchet surfaces: LMQ as a function of tan α
for L/H = 2, H1/H = 1, and Kn = 0.28. In the left figure, all lower walls are
diffusive. In the right figure, the vertical and horizontal lower walls are diffusive,
and the inclined wall is specular.
(a) LMQ (diffusive) (b) LMQ (diffusive-specular)
Figure 5.9: Cross coupling in channel of ratchet surfaces: LMQ as a function of L/H
for tan α = 1.25, H1/H = 1, and Kn = 0.28. In the left figure, all lower walls are
diffusive. In the right figure, the vertical and horizontal lower walls are diffusive,
and the inclined wall is specular.
82

(a) LMQ (diffusive) (b) LMQ (diffusive-specular)
Figure 5.10: Cross coupling in channel of ratchet surfaces: LMQ as a function of
H1/H for L/H = 2.5, tan α = 1.25, and Kn = 0.28. In the left figure, all lower walls
are diffusive. In the right figure, the vertical and horizontal lower walls are diffusive,
and the inclined wall is specular.
Figure 5.9 shows the LMQ as a function of L/H for tan α = 1.25, H1/H = 1, and
Kn = 0.28. The left figure is for diffusive configuration and the right figure is for
diffusive-specular configuration. In the diffusive configuration, LMQ is a decreasing
function of L/H. This is probably due to the fact that the number of ratchets per unit
length is decreasing. In the diffusive-specular configuration, LMQ takes a maximum
value around L/H ≈ 2.25.
Figure 5.10 shows the LMQ as a function of H1/H for tan α = 1.25, L/H = 2.5,
and Kn = 0.28. The left figure is for diffusive configuration and the right figure
is for diffusive-specular configuration. In both configurations, LMQ is an increasing
function of H1/H and tends to a constant value above H1/H ≈ 1.25. This is probable
because the thermal-induced flow is significant within a certain distance to the edge.
If the height is below this threshold, increasing the height will increase LMQ. If the
height is above this threshold, increasing the height will not have too much influence
on the induced flow.
Since the induced velocity of a diffusive-configuration is significantly higher than the
corresponding diffusive one, it’s preferred if the manufacturation is possible. And
the diffusive-specular configuration is most efficient for large α, moderate L/H, and
83

H1/H above some threshold value.
5.6 Conclusion
In this chapter, the cross coupling of thermal-osmosis and mechano-caloric effect in
gas not far away from equilibrium is studied. The mechanism in micro-channels
with planner surfaces and ratchet surfaces are analysed. U ∝ LMQ ∝ KnC at the slip
regime for fixed temperature T and ∆T is theoretically derived from the slip boundary
condition.
Numerical simulations are performed to obtain the off-diagonal kinetic coefficients as
a function of Knudsen number. The kinetic coefficients in micro-channel of planner
surfaces are compared with the S-model solution of Chernyak et al. [95], where good
agreement is found. The kinetic coefficients in micro-channel of ratchet surfaces are
also obtained and the Onsager’s reciprocal relations are confirmed. The numerical
simulation also verifies that LMQ is approximately LMQ ∝ KnC(0 < C < 1) for channel
with ratchet surfaces in low Knudsen numbers and reaches a maximum around Kn ≈0.28, then gradually decreases.
Since micro-channel with ratchet surfaces has the potential to be an alternative config-
uration of Knudsen pump, a preliminary optimization of its geometry is also provided
for two different configurations — either all the lower walls are diffusive (diffusive
configuration) or the lower vertical and horizontal walls are diffusive while the in-
clined wall is specular (diffusive-specular configuration). The diffusive-specular con-
figuration has a significantly higher average velocity than that from the corresponding
diffusive one, and is the most efficient for large α, moderate L/H, and H1/H above
certain threshold value.
84

Chapter 6
Conclusion and Future Work
6.1 Conclusion
This thesis concentrates on the development of unified gas kinetic scheme and its
application on the study of non-equilibrium phenomena.
Unified gas kinetic scheme is a multi-scale method to simulate gas flow in the whole
Knudsen regime. It is a second order asymptotic preserving scheme in both free
molecular limit and continuum limit due to its coupling of molecular free transport
and collision process in the flux calculation. The scheme is presented in detail and
validated by the test case of flow expansion to vacuum through a short channel.
Discrete unified gas kinetic scheme is a simplified variation of UGKS that is also
presented. Analysis shows that the flux in DUGKS is almost the same as UGKS in
terms of leading orders. And numerical tests on the Sod shock tube, shock structure,
and lid-driven cavity show that DUGKS can produce almost the same solutions as
UGKS, and is generally 10% ∼ 20% faster than UGKS.
Then UGKS is constructed to simulate multi-component flow based on the AAP
model. Numerical tests are preformed for the shock structure at different Mach num-
bers and micro-channel flows driven by small pressure, temperature, and component
concentration gradients. Comparing with the reference solution shows that current
implementation has good agreement under moderate Mach numbers and mass ratios.
The deviation is partially due to the transport coefficients are not fully accurate from
current kinetic model except for Maxwell molecules, and is more obvious for the light
85

component.
UGKS is then applied to study the sound-wave propagation in monatomic gas in the
whole Knudsen regime. The phase speed and attenuation coefficient are obtained
and compared with the DSMC solution and experimental data, where good agree-
ments are found. This provides another validation of UGKS method in capturing
the physical solutions for non-equilibrium flows. The wave propagation in high fre-
quencies/high Knudsen number flow is quite different from the classical sound wave
results, and the phase speed and attenuation coefficient show the dependence on the
location for their evaluation.
The cross-coupling of thermal-osmosis and mechano-caloric effect in gas not far away
from equilibrium is also studied. The cross-coupling mechanism in micro-channels
with planner surfaces and ratchet surfaces are analysed. Then numerical simulations
are performed to obtain the off-diagonal kinetic coefficients as a function of Knudsen
numbers, and it shows that the Onsager’s reciprocal relation holds for both cases if
the gas is not far away from equilibrium. The numerical solution also shows that
the average velocity for channel with ratchet surfaces is approximately U ∝ KnC(0 <
C < 1) in low Knudsen numbers and reaches a maximum around Kn ∼ 0.28, then
gradually decreases. Since micro-channel with ratchet surfaces has the potential to
be an alternative configuration of Knudsen pump, a preliminary optimization of its
geometry is also provided.
6.2 Future Work
In the future, the research will concentrate on the refinement of UGKS for multi-
component gas and apply UGKS for the study of micro-flows.
In current implementation of multi-component flow simulation, the transport coeffi-
cients are not fully accurate for a general gas model. This is an important aspect that
needs improvement. One possible method is to replace the AAP model by the ellip-
soidal models [64, 63]. When updating the cell-averaged macroscopic quantities, the
explicit scheme is currently used. However, an implicit implementation is preferred.
For single-component simulation, an important reason to simultaneously update the
86

macroscopic quantities and distribution functions is to ensure the macroscopic con-
servation. But the current implementation for multi-component gas doesn’t enforce
it. This is another aspect that needs attention. These improvements aim to enhance
the accuracy of the scheme as well as to enlarge its applicable area. If the transport co-
efficients can be better recovered, the cross-coupling of Soret effect and Dufour effect
can be studied for multi-component gas as well.
Micro-flow is an interesting application area of UGKS. Multi-scale problems exist
in the thin-film formation and MEMS manufacture technologies, microfluidic filters,
micro-nozzles, vacuum devices, Knudsen pumps, etc. The mass and heat transfer,
and the forces exerted by the gas in the system, can be predicted accurately by UGKS
simulation. The UGKS will benefit the design and optimization of micro-devices
greatly.
87

Bibliography
[1] C. R. Kleijn, R. Dorsman, K. J. Kuijlaars, M. Okkerse, and H. van Santen, “Multi-
scale modeling of chemical vapor deposition processes for thin film technology,”
Journal of Crystal Growth, vol. 303, no. 1, pp. 362–380, 2007.
[2] O. Aktas and N. Aluru, “A Combined Continuum/DSMC Technique for Multi-
scale Analysis of Microfluidic Filters,” Journal of Computational Physics, vol. 178,
no. 2, pp. 342–372, 2002.
[3] E. Titov, M. I. Zeifman, and D. Levin, “Application of the kinetic and continuum
Techniques to the multi-scale flows in MEMS Devices,” in 43rd AIAA Aerospace
Science Meeting, (Reno, Nevada), pp. 2005–1399, 2005.
[4] X. Luo, R. Wang, C. Day, and K. Xu, “Study of vacuum gas flows with the unified
gas-kinetic scheme,” in Proceedings of the 29th International Symposium on Rarefied
Gas Dynamics, pp. 1371–1377, 2014.
[5] C. Shen, Rarefied gas dynamics: fundamentals, simulations and micro flows. Springer,
2005.
[6] P. Bhatnagar, E. Gross, and M. Krook, “A Model for Collision Processes in Gases.
I. Small Amplitude Processes in Charged and Neutral One-Component Systems,”
Physical Review, vol. 94, pp. 511–525, May 1954.
[7] C. Cercignani, The Boltzmann Equation and Its Applications. Springer New York,
1988.
[8] S. Chapman and T. G. Cowling, The mathematical theory of non-uniform gases. Cam-
bridge University Press, 3rd ed., 1970.
[9] E. F. Toro, Riemann Solvers and Numerical Methods for Fluid Dynamics. Springer,
2009.
88

[10] J. Blazek, Computational Fluid Dynamics: Principles and Applications. Butterworth-
Heinemann, 3rd ed., 2015.
[11] Z. Guo and C. Shu, Lattice Boltzmann Method and Its Applications in Engineering.
World Scientific Publishing, 2013.
[12] K. Xu, “A Gas-Kinetic BGK Scheme for the NavierStokes Equations and Its Con-
nection with Artificial Dissipation and Godunov Method,” Journal of Computa-
tional Physics, vol. 171, pp. 289–335, July 2001.
[13] G. Karniadakis, A. Beskok, and N. Aluru, Microflows and Nanoflows : Fundamentals
and Simulation. Springer New York, 2005.
[14] D. Burnett, “The distribution of molecular velocities and the mean motion in
a non-uniform gas,” Proceedings of the London Mathematical Society, vol. 2, no. 1,
pp. 382–435, 1936.
[15] H. Grad, “On the kinetic theory of rarefied gases,” Communications on pure and
applied mathematics, vol. 2, no. 4, pp. 331–407, 1949.
[16] H. Struchtrup, Macroscopic Transport Equations for Rarefied Gas Flows. Springer
Berlin Heidelberg, 2005.
[17] Y. Sone, Kinetic Theory and Fluid Dynamics. Springer, 2002.
[18] G. A. Bird, Molecular Gas Dynamics and the Direct Simulation of Gas Flows. New
York: Oxford University Press, 1994.
[19] D. Goldstein, B. Sturtevant, and J. Broadwell, “Investigations of the motion of
discrete-velocity gases,” Progress in Astronautics and Aeronautics, vol. 117, pp. 100–
117, 1989.
[20] A. B. Morris, P. L. Varghese, and D. B. Goldstein, “Monte Carlo solution of
the Boltzmann equation via a discrete velocity model,” Journal of Computational
Physics, vol. 230, no. 4, pp. 1265–1280, 2011.
[21] L. Pareschi and B. Perthame, “A Fourier spectral method for homogeneous boltz-
mann equations,” Transport Theory and Statistical Physics, vol. 25, no. 3-5, pp. 369–
382, 1996.
89

[22] F. Filbet and G. Russo, “High order numerical methods for the space non-
homogeneous Boltzmann equation,” Journal of Computational Physics, vol. 186,
no. 2, pp. 457–480, 2003.
[23] L. Wu, C. White, T. J. Scanlon, J. M. Reese, and Y. Zhang, “Deterministic numer-
ical solutions of the Boltzmann equation using the fast spectral method,” Journal
of Computational Physics, vol. 250, pp. 27–52, 2013.
[24] J. Yang and J. Huang, “Rarefied Flow Computations Using Nonlinear Model
Boltzmann Equations,” Journal of Computational Physics, vol. 120, no. 2, pp. 323–
339, 1995.
[25] Z. H. Li and H. X. Zhang, “Study on gas kinetic unified algorithm for flows from
rarefied transition to continuum,” Journal of Computational Physics, vol. 193, no. 2,
pp. 708–738, 2004.
[26] K. Xu and J.-C. Huang, “A unified gas-kinetic scheme for continuum and rarefied
flows,” Journal of Computational Physics, vol. 229, no. 20, pp. 7747–7764, 2010.
[27] J.-C. Huang, K. Xu, and P. Yu, “A Unified Gas-Kinetic Scheme for Continuum and
Rarefied Flows II: Multi-Dimensional Cases,” Communications in Computational
Physics, vol. 12, no. 3, pp. 662–690, 2012.
[28] C. K. Chu, “Kinetic-Theoretic Description of the Formation of a Shock Wave,”
Physics of Fluids, vol. 8, no. 1, p. 12, 1965.
[29] S. Chen, K. Xu, C. Lee, and Q. Cai, “A unified gas kinetic scheme with moving
mesh and velocity space adaptation,” Journal of Computational Physics, vol. 231,
no. 20, pp. 6643–6664, 2012.
[30] R. R. Arslanbekov, V. I. Kolobov, and A. A. Frolova, “Kinetic solvers with adaptive
mesh in phase space,” Physical Review E, vol. 88, no. 6, 2013.
[31] D. Hash and H. Hassan, “A hybrid DSMC/Navier-Stokes solver,” in 33rd
Aerospace Sciences Meeting and Exhibit, (Reno), pp. 95–0410, AIAA, 1995.
[32] T. E. Schwartzentruber, L. C. Scalabrin, and I. D. Boyd, “Hybrid Particle-
Continuum Simulations of Nonequilibrium Hypersonic Blunt-Body Flowfields,”
Journal of Thermophysics and Heat Transfer, vol. 22, no. 1, pp. 29–37, 2008.
90

[33] V. Kolobov, R. Arslanbekov, S. Bayyuk, V. Aristov, A. Frolova, S. Zabelok, and
F. Tcheremissine, “Unified Kinetic Approach for Simulation of Gas Flows in Rar-
efied and Continuum Regimes,” tech. rep., CFD Research Corporation, 2007.
[34] V. I. Kolobov, S. A. Bayyuk, R. R. Arslanbekov, V. V. Aristov, A. Frolova, and
S. Zabelok, “Construction of a Unified Continuum/Kinetic Solver for Aerody-
namic Problems,” Journal of Spacecraft and Rockets, vol. 42, no. 4, pp. 598–606,
2005.
[35] N. Crouseilles, P. Degond, and M. Lemou, “Hybrid kinetic/fluid models for
nonequilibrium systems,” Comptes Rendus Mathematique, vol. 336, no. 4, pp. 359–
364, 2003.
[36] A. E. Beylich, “Solving the kinetic equation for all Knudsen numbers,” Physics of
Fluids, vol. 12, no. 2, p. 444, 2000.
[37] J. C. Huang, K. Xu, and P. Yu, “A unified gas-kinetic scheme for continuum
and rarefied flows III: Microflow simulations,” Communications in Computational
Physics, vol. 14, no. 5, pp. 1147–1173, 2013.
[38] K. H. Prendergast and K. Xu, “Numerical Hydrodynamics from Gas-Kinetic The-
ory.pdf,” Journal of Computational Physics, vol. 109, no. 1, pp. 53–66, 1993.
[39] E. M. Shakhov, “Generalization of the Krook kinetic relaxation equation,” Fluid
Dynamics, vol. 3, no. 5, pp. 95–96, 1972.
[40] L. H. Holway, “New Statistical Models for Kinetic Theory: Methods of Construc-
tion,” Physics of Fluids, vol. 9, no. 9, pp. 1658–1673, 1966.
[41] S. Chen, K. Xu, and Q. Cai, “A Comparison and Unification of Ellipsoidal Statis-
tical and Shakhov BGK Models,” Advances in Applied Mathematics and Mechanics,
vol. 7, no. 2, pp. 245–266, 2015.
[42] V. A. Rykov, “A model kinetic equation for a gas with rotational degrees of free-
dom,” Fluid Dynamics, vol. 10, no. 6, pp. 959–966, 1975.
[43] P. Andries, P. Le Tallec, J. P. Perlat, and B. Perthame, “Gaussian-BGK model of
Boltzmann equation with small Prandtl number,” European Journal of Mechanics,
B/Fluids, vol. 19, no. 6, pp. 813–830, 2000.
91

[44] K. Xu, “Gas-kinetic schemes for unsteady compressible flow simulations,” tech.
rep., von Karman Institute for Fluid Dynamics, 1998.
[45] S. Liu, P. Yu, K. Xu, and C. Zhong, “Unified gas-kinetic scheme for diatomic
molecular simulations in all flow regimes,” Journal of Computational Physics,
vol. 259, no. 15, pp. 96–113, 2014.
[46] K. Xu, Direct Modeling for Computational Fluid Dynamics: Construction and Applica-
tion of Unified Gas-Kinetic Schemes. World Scientific Publishing, 2015.
[47] C. Liu, K. Xu, Q. Sun, and Q. Cai, “A unified gas-kinetic scheme for continuum
and rarefied flows, direct modeling, and full Boltzmann collision term.” 2014.
[48] J. Luo, K. Xu, and N. Liu, “A Well-Balanced Symplecticity-Preserving Gas-Kinetic
Scheme for Hydrodynamic Equations under Gravitational Field,” Journal on Sci-
entific Computing, vol. 33, no. 5, p. 31, 2011.
[49] F. Filbet and S. Jin, “A class of asymptotic-preserving schemes for kinetic equa-
tions and related problems with stiff sources,” Journal of Computational Physics,
vol. 229, no. 20, pp. 7625–7648, 2010.
[50] B. Shizgal, “A Gaussian quadrature procedure for use in the solution of the Boltz-
mann equation and related problems,” Journal of Computational Physics, vol. 41,
pp. 309–328, June 1981.
[51] F. Sharipov, “Benchmark problems in rarefied gas dynamics,” Vacuum, vol. 86,
no. 11, pp. 1697–1700, 2012.
[52] F. Sharipov and V. Seleznev, “Data on Internal Rarefied Gas Flows,” Journal of
Physical and Chemical Reference Data, vol. 27, no. 3, pp. 657–706, 1998.
[53] S. Varoutis, C. Day, and F. Sharipov, “Rarefied gas flow through channels of finite
length at various pressure ratios,” Vacuum, vol. 86, no. 12, pp. 1952–1959, 2012.
[54] Z. Guo, K. Xu, and R. Wang, “Discrete unified gas kinetic scheme for all Knudsen
number flows: Low-speed isothermal case,” Physical Review E, vol. 88, no. 3,
p. 033305, 2013.
[55] Z. Guo, R. Wang, and K. Xu, “Discrete unified gas kinetic scheme for all Knudsen
number flows. II. Thermal compressible case,” Physical Review E, vol. 91, no. 3,
p. 033313, 2015.
92

[56] G. M. Kremer, An Introduction to the Boltzmann Equation and Transport Processes in
Gases. Springer-Verlag Berlin Heidelberg, 2010.
[57] P. Andries, K. Aoki, and B. Perthame, “A Consistent BGK-type Model for Gas
Mixtures,” Journal of Statistical Physics, vol. 106, no. 5-6, pp. 993–1018, 2002.
[58] E. Gross and M. Krook, “Model for Collision Processes in Gases: Small-
Amplitude Oscillations of Charged Two-Component Systems,” Physical Review,
vol. 102, pp. 593–604, May 1956.
[59] L. Sirovich, “Kinetic Modeling of Gas Mixtures,” Physics of Fluids, vol. 5, no. 8,
pp. 908–918, 1962.
[60] V. Garzo, A. Santos, and J. J. Brey, “A kinetic model for a multicomponent gas,”
Physics of Fluids A: Fluid Dynamics, vol. 1, no. 2, pp. 380–383, 1989.
[61] B. B. Hamel, “Kinetic Model for Binary Gas Mixtures,” Physics of Fluids, vol. 8,
no. 3, pp. 418–425, 1965.
[62] P. Asinari and L.-S. Luo, “A consistent lattice Boltzmann equation with baroclinic
coupling for mixtures,” Journal of Computational Physics, vol. 227, pp. 3878–3895,
Apr. 2008.
[63] M. Groppi, S. Monica, and G. Spiga, “A kinetic ellipsoidal BGK model for a
binary gas mixture,” EPL (Europhysics Letters), vol. 96, p. 64002, Dec. 2011.
[64] S. Brull, V. Pavan, and J. Schneider, “Derivation of a BGK model for mixtures,”
European Journal of Mechanics - B/Fluids, vol. 33, pp. 74–86, May 2012.
[65] T. F. Morse, “Energy and Momentum Exchange between Nonequipartition
Gases,” Physics of Fluids, vol. 6, no. 10, pp. 1420–1427, 1963.
[66] S. Kosuge, K. Aoki, and S. Takata, “Shock-wave structure for a binary gas
mixture: finite-difference analysis of the Boltzmann equation for hard-sphere
molecules,” European Journal of Mechanics - B/Fluids, vol. 20, pp. 87–126, Jan. 2001.
[67] K. Xu and J. C. Huang, “An improved unified gas-kinetic scheme and the study
of hock structures,” IMA Journal of Applied Mathematics, vol. 76, pp. 698–711, Mar.
2011.
93

[68] S. Kosuge and S. Takata, “Database for flows of binary gas mixtures through a
plane microchannel,” European Journal of Mechanics - B/Fluids, vol. 27, pp. 444–465,
July 2008.
[69] F. J. McCormack, “Construction of linearized kinetic models for gaseous mixtures
and molecular gases,” Physics of Fluids, vol. 16, no. 12, pp. 2095–2105, 1973.
[70] C. Wang Chang and G. Uhlenbeck, “On the propagation of sound in monatomic
gases,” in Studies in statistical mechanics, Volume 5 (J. Boer and G. Uhlenbeck, eds.),
pp. 43–75, Amsterdam: North Holland, 1970.
[71] C. L. Pekeris, Z. Alterman, L. Finkelstein, and K. Frankowski, “Propagation of
Sound in a Gas of Rigid Spheres,” Physics of Fluids, vol. 5, no. 12, pp. 1608–1610,
1962.
[72] L. Sirovich and J. K. Thurber, “Propagation of Forced Sound Waves in Rar-
efied Gasdynamics,” The Journal of the Acoustical Society of America, vol. 37, no. 2,
pp. 329–339, 1965.
[73] J. K. Buckner and J. H. Ferziger, “Linearized Boundary Value Problem for a Gas
and Sound Propagation,” Physics of Fluids, vol. 9, no. 12, pp. 2315–2322, 1966.
[74] J. R. Thomas and C. E. Siewert, “Sound-wave propagation in a rarefied gas,”
Transport Theory and Statistical Physics, vol. 8, no. 4, pp. 219–240, 1979.
[75] S. K. Loyalka and T. Cheng, “Sound-wave propagation in a rarefied gas,” Physics
of Fluids, vol. 22, no. 5, pp. 830–836, 1979.
[76] N. G. Hadjiconstantinou and A. L. Garcia, “Molecular simulations of sound wave
propagation in simple gases,” Physics of Fluids, vol. 13, no. 4, pp. 1040–1046, 2001.
[77] M. Greenspan, “Propagation of Sound in Five Monatomic Gases,” The Journal of
the Acoustical Society of America, vol. 28, no. 4, pp. 644–648, 1956.
[78] E. Meyer and G. Sessler, “Schallausbreitung in Gasen bei hohen Frequenzen und
sehr niedrigen Drucken,” Zeitschrift für Physik, vol. 149, no. 1, pp. 15–39, 1957.
[79] R. D. M. Garcia and C. E. Siewert, “The linearized Boltzmann equation: Sound-
wave propagation in a rarefied gas,” Zeitschrift fur Angewandte Mathematik und
Physik, vol. 57, no. 1, pp. 94–122, 2005.
94

[80] H. Struchtrup, “Resonance in rarefied gases,” Continuum Mechanics and Thermo-
dynamics, vol. 24, no. 4-6, pp. 361–376, 2012.
[81] F. Sharipov, W. Marques, and G. M. Kremer, “Free molecular sound propaga-
tion,” The Journal of the Acoustical Society of America, vol. 112, no. 2, pp. 395–401,
2002.
[82] R. Schotter, “Rarefied gas acoustics in the noble gases,” Physics of Fluids, vol. 17,
no. 6, pp. 1163–1168, 1974.
[83] L. Onsager, “Reciprocal Relations in Irreversible Processes. I.,” Physical Review,
vol. 37, pp. 405–426, Feb. 1931.
[84] L. Onsager, “Reciprocal Relations in Irreversible Processes. II.,” Physical Review,
vol. 38, pp. 2265–2279, Dec. 1931.
[85] S. R. de Groot and P. Mazur, Non-Equilibrium Thermodynamics. Dover Publica-
tions, 1984.
[86] L. Waldmann, “Non-equilibrium Thermodynamics of Boundary Conditions,”
Zeitschrift Naturforschung Teil A, vol. 22, no. 8, pp. 1269–1280, 1967.
[87] S. K. Loyalka, “Kinetic Theory of Thermal Transpiration and Mechanocaloric
Effect. I,” The Journal of Chemical Physics, vol. 55, no. 9, pp. 4497–4503, 1971.
[88] S. K. Loyalka, “Kinetic theory of thermal transpiration and mechanocaloric effect.
II,” The Journal of Chemical Physics, vol. 63, no. 9, pp. 4054–4060, 1975.
[89] F. Sharipov, “Onsager-Casimir reciprocal relations based on the Boltzmann equa-
tion and gas-surface interaction: Single gas,” Physical Review E, vol. 73, p. 026110,
Feb. 2006.
[90] K. Aoki, P. Degond, and L. Mieussens, “Numerical Simulation of a Knudsen
Pump Using the Effect of Curvature of the Channel,” in 25th International Sympo-
sium on Rarefied Gas Dynamics, (Saint-Petersburg, Russia), pp. 1–6, 2006.
[91] A. Würger, “Leidenfrost Gas Ratchets Driven by Thermal Creep,” Physical Review
Letters, vol. 107, p. 164502, Oct. 2011.
[92] S. Hardt, S. Tiwari, and T. Baier, “Thermally driven flows between a Leidenfrost
solid and a ratchet surface,” Physical Review E, vol. 87, p. 063015, June 2013.
95

[93] A. A. Donkov, S. Tiwari, T. Liang, S. Hardt, A. Klar, and W. Ye, “Momentum
and mass fluxes in a gas confined between periodically structured surfaces at
different temperatures,” Physical Review E, vol. 84, p. 016304, July 2011.
[94] F. Sharipov, “Onsager-Casimir reciprocity relations for open gaseous systems at
arbitrary rarefraction: II. Application of the theory for single gas,” Physica A:
Statistical Mechanics and its Applications, vol. 203, no. 3-4, pp. 457–485, 1994.
[95] V. G. Chernyak, V. V. Kalinin, and P. E. Suetin, “Theory of nonisothermal gas
motion in a plane channel,” Journal of Engineering Physics, vol. 36, pp. 696–700,
June 1979.
96

Appendix A
Taylor Expansion of Maxwell Distribution
In a Cartesian grid (x, y, z), the first order Taylor expansion of g at (x0, t0) is
g(x, t) =g + gx · (x − x0) + gt(t − t0)
=g[1 + a(x − x0) + b(y − y0) + c(z − z0) + A(t − t0)],
(A.1)
where g and its derivatives are evaluated at (x0, t0). The coefficients a, b, c, A share the
same form. Taking A as example,
A =1
ggt =
1
g
∂g
∂W· ∂W
∂t=
1
g
(
∂g
∂ρρt +
∂g
∂(ρUi)(ρUi)t +
∂g
∂(ρE)(ρE)t
)
. (A.2)
The derivatives of g to the conservative variables are calculated form the chain rule,
∂g
∂ρ=
∂g
∂ρ
∂ρ
∂ρ+
∂g
∂Ui
∂Ui
∂ρ+
∂g
∂T
∂T
∂ρ= g
(
5
2ρ− 1
2puiui +
ρ
6p2UiUicjcj
)
, (A.3)
∂g
∂(ρUi)=
∂g
∂ρ
∂ρ
∂(ρUi)+
∂g
∂Uj
∂Uj
∂(ρUi)+
∂g
∂T
∂T
∂(ρUi)= g
(
1
pui −
ρ
3p2Uicjcj
)
, (A.4)
∂g
∂(ρE)=
∂g
∂ρ
∂ρ
∂(ρE)+
∂g
∂Ui
∂Ui
∂(ρE)+
∂g
∂T
∂T
∂(ρE)= g
(
ρ
3p2cici −
1
p
)
. (A.5)
Substitute Eq.(A.3) - Eq.(A.5) into Eq.(A.2), and rearrange A into the following form,
A = aiψi = a1 + ai+1ui + a51
2uiui, (A.6)
97

then ai are
a5 =ρ
3p2
(
2∂ρE
∂t+
(
UiUi −3p
ρ
)
∂ρ
∂t− 2Ui
∂ρUi
∂t
)
, (A.7)
ai+1 =1
p
(
∂ρUi
∂t− Ui
∂ρ
∂t
)
− Uia5 (i = 1, 2, 3), (A.8)
a1 =1
ρ
∂ρ
∂t− Uiai+1 −
1
2
(
UiUi +3p
ρ
)
a5. (A.9)
Other coefficients are calculated by replacing the corresponding derivatives of conser-
vative variables in Eq.(A.7) - Eq.(A.9).
Another method to derive Eq.(A.7) - Eq.(A.9) is to substitute Eq.(A.6) into Eq.(A.2),
then integrate over the particle velocity [12].
98

Appendix B
Moments of Maxwell Distribution
Following [12], the moment of a Maxwell distribution is denoted as
⟨φ⟩ = 1
ρ
∫
φgdu. (B.1)
Since particle velocities are independent, it follows the following rules,
⟨aun1 um
2 ul3 + b⟩ = a⟨un
1⟩⟨um2 ⟩⟨ul
3⟩+ b, (B.2)
where a, b are not a function of particle velocities.
The moment ⟨un⟩ satisfies the recursive relation,
⟨un+2⟩ = U⟨un+1⟩+ p
ρ(n + 1)⟨un⟩. (B.3)
For full range integration in (−∞, ∞), the first two values are
⟨u0⟩ = 1, ⟨u1⟩ = U. (B.4)
For half range integrations in (−∞, 0) and (0, ∞), the first two values are
⟨u0⟩<0 =1
2erfc
(√
ρ
2pU
)
, (B.5)
⟨u1⟩<0 = U⟨u0⟩<0 −1
2
√
2p
πρexp
(
− ρ
2pU2
)
, (B.6)
and
⟨u0⟩>0 =1
2erfc
(
−√
ρ
2pU
)
, (B.7)
⟨u1⟩>0 = U⟨u0⟩>0 +1
2
√
2p
πρexp
(
− ρ
2pU2
)
. (B.8)
99

If reduced distribution functions are used, the integration of ξ ′2 = ξ∗i ξ∗i + ξ jξ j and
ξ ′4 = (ξ∗i ξ∗i + ξ jξ j)2 are needed,
⟨ξ ′2⟩ = (3 + M − N)
(
p
ρ
)
, ⟨ξ ′4⟩ = (3 + M − N)(5 + M − N)
(
p
ρ
)2
, (B.9)
where N is the dimension of the problem, ξ∗i (i = 1, .., 3− N) has (3− N) dimensions,
and ξi (i = 1, ..., M) are the degree of freedom other than the translational one.
100