Embed Size (px)
Citation preview
Underwater Wireless Communications: Modem
Design and Implementation
Yahong Rosa Zheng
Department of Electrical & Computer Engineering
Lehigh University, Bethlehem, PA, 18015
The work is supported in part by USDoT, ONR and NSF
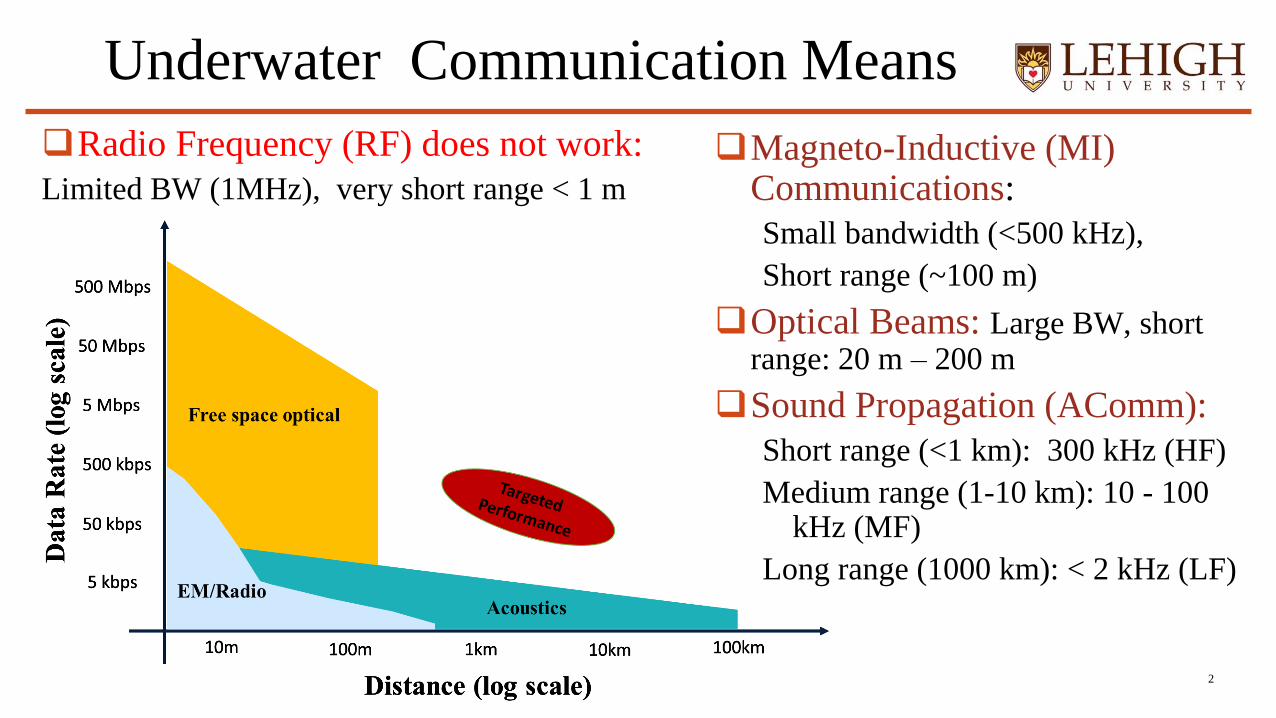
Underwater Communication Means
2
❑Magneto-Inductive (MI) Communications:
Small bandwidth (<500 kHz),
Short range (~100 m)
❑Optical Beams: Large BW, short range: 20 m – 200 m
❑Sound Propagation (AComm):
Short range (<1 km): 300 kHz (HF)
Medium range (1-10 km): 10 - 100 kHz (MF)
Long range (1000 km): < 2 kHz (LF)
❑Radio Frequency (RF) does not work:
Limited BW (1MHz), very short range < 1 m
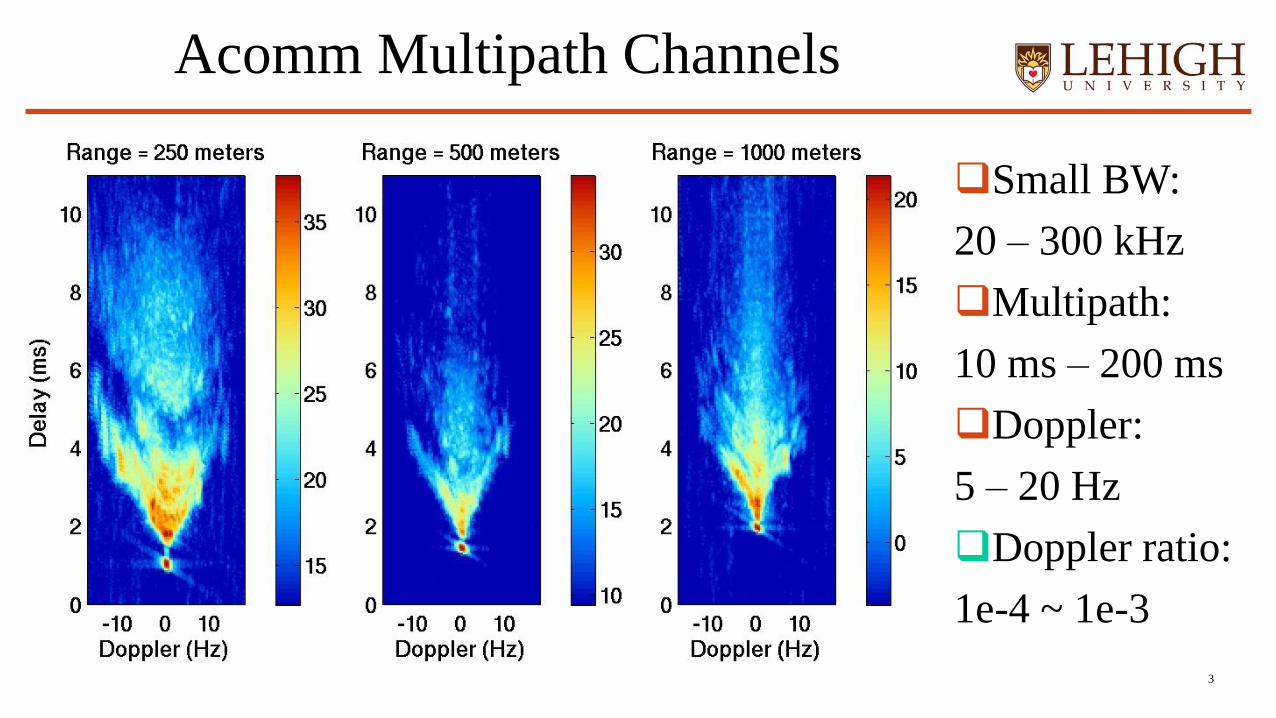
Acomm Multipath Channels
3
❑Small BW:
20 – 300 kHz
❑Multipath:
10 ms – 200 ms
❑Doppler:
5 – 20 Hz
❑Doppler ratio:
1e-4 ~ 1e-3
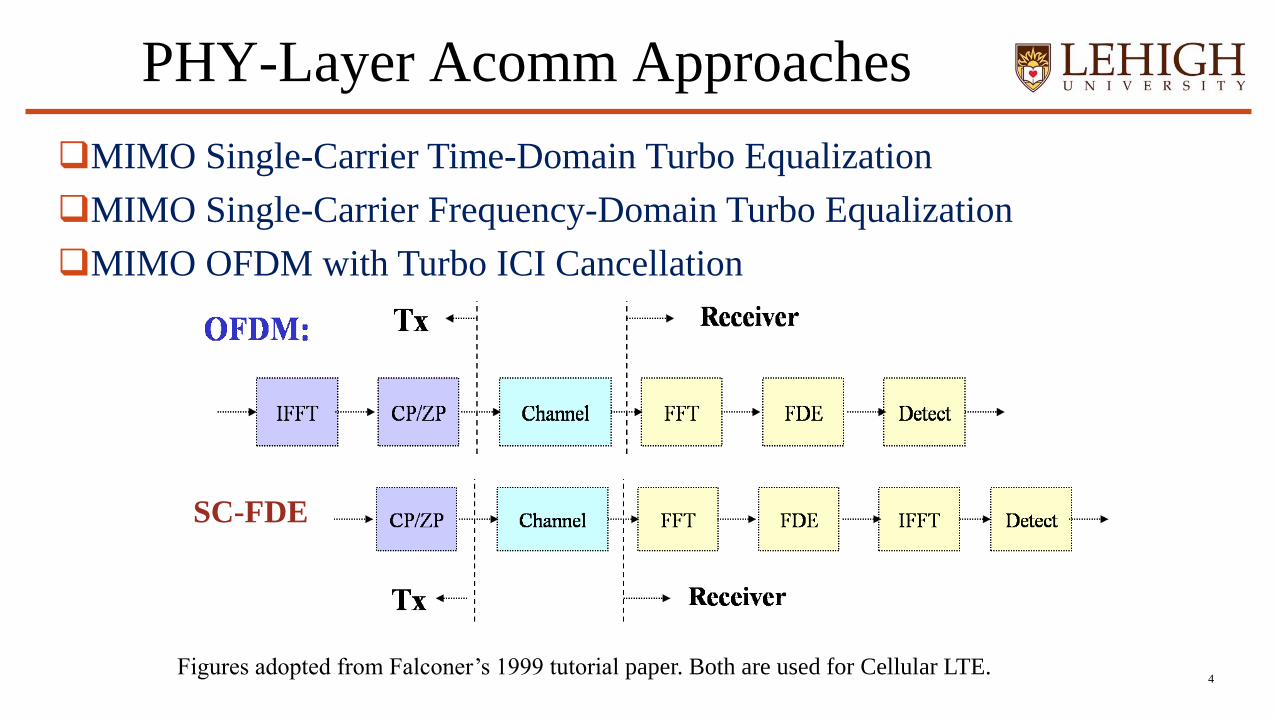
PHY-Layer Acomm Approaches
4
SC-FDE
❑MIMO Single-Carrier Time-Domain Turbo Equalization
❑MIMO Single-Carrier Frequency-Domain Turbo Equalization
❑MIMO OFDM with Turbo ICI Cancellation
Figures adopted from Falconer’s 1999 tutorial paper. Both are used for Cellular LTE.
5
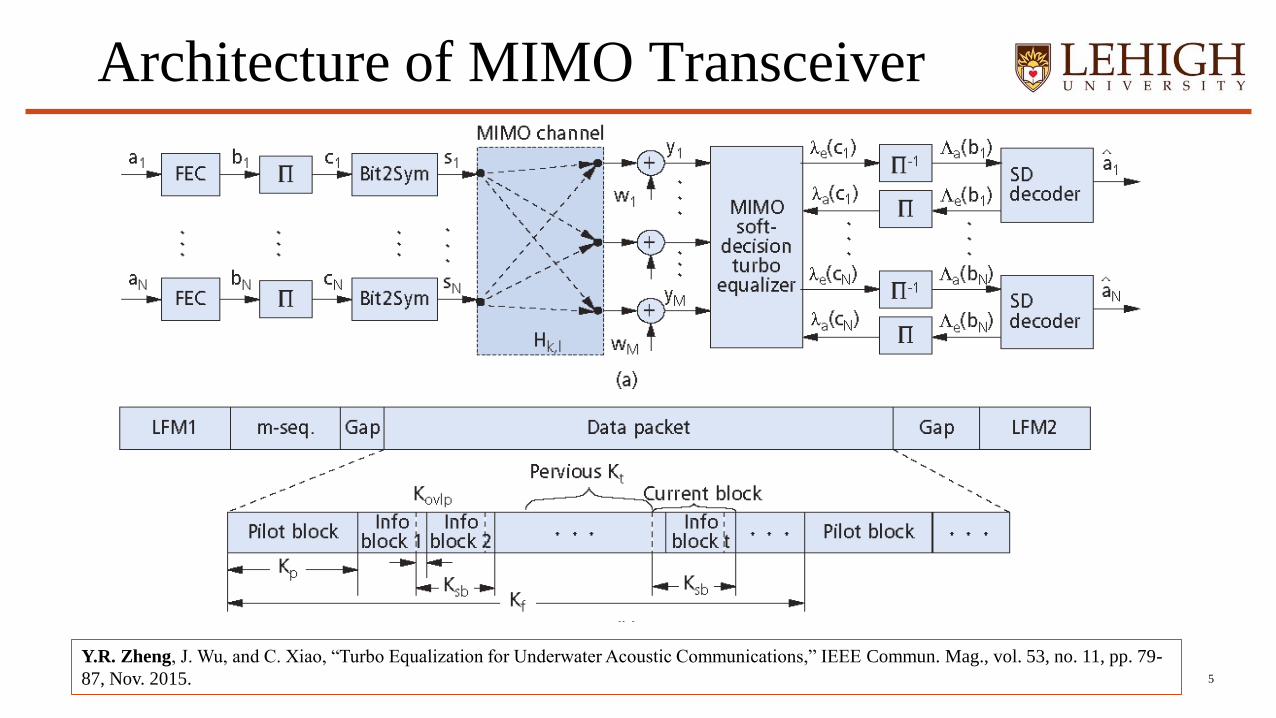
Architecture of MIMO Transceiver
Y.R. Zheng, J. Wu, and C. Xiao, “Turbo Equalization for Underwater Acoustic Communications,” IEEE Commun. Mag., vol. 53, no. 11, pp. 79-
87, Nov. 2015.
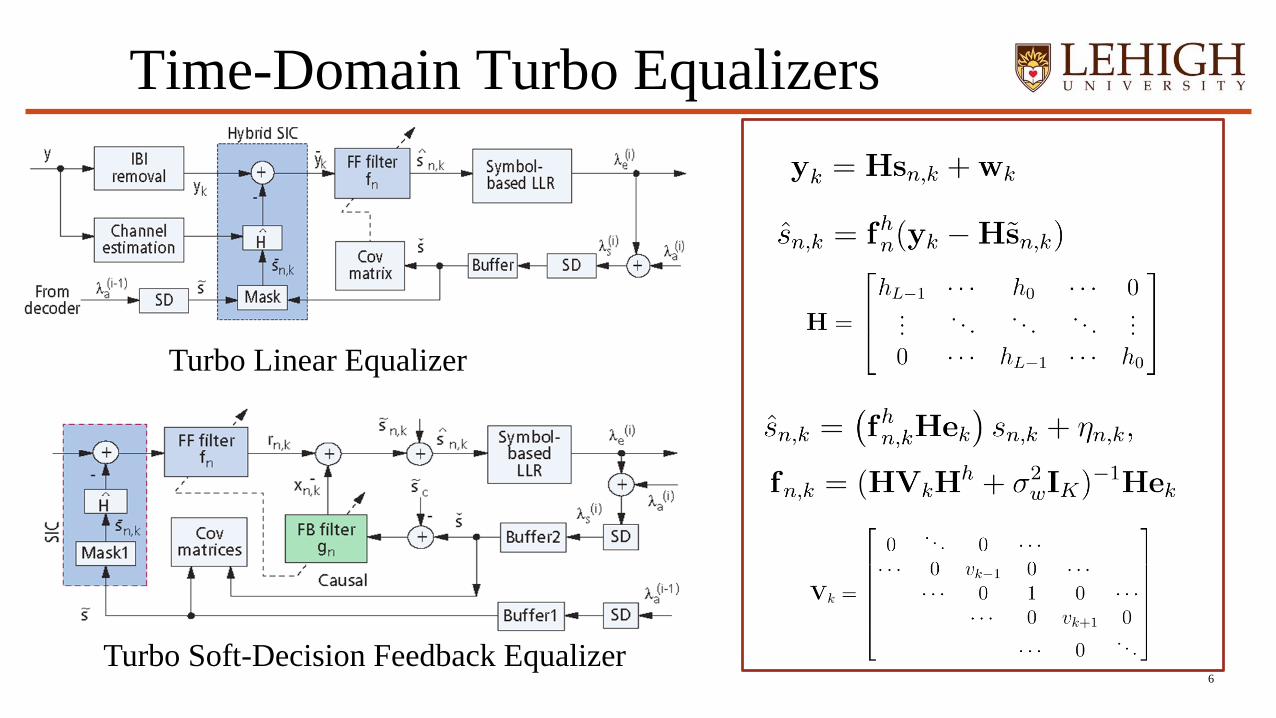
Time-Domain Turbo Equalizers
6
Turbo Linear Equalizer
Turbo Soft-Decision Feedback Equalizer
7
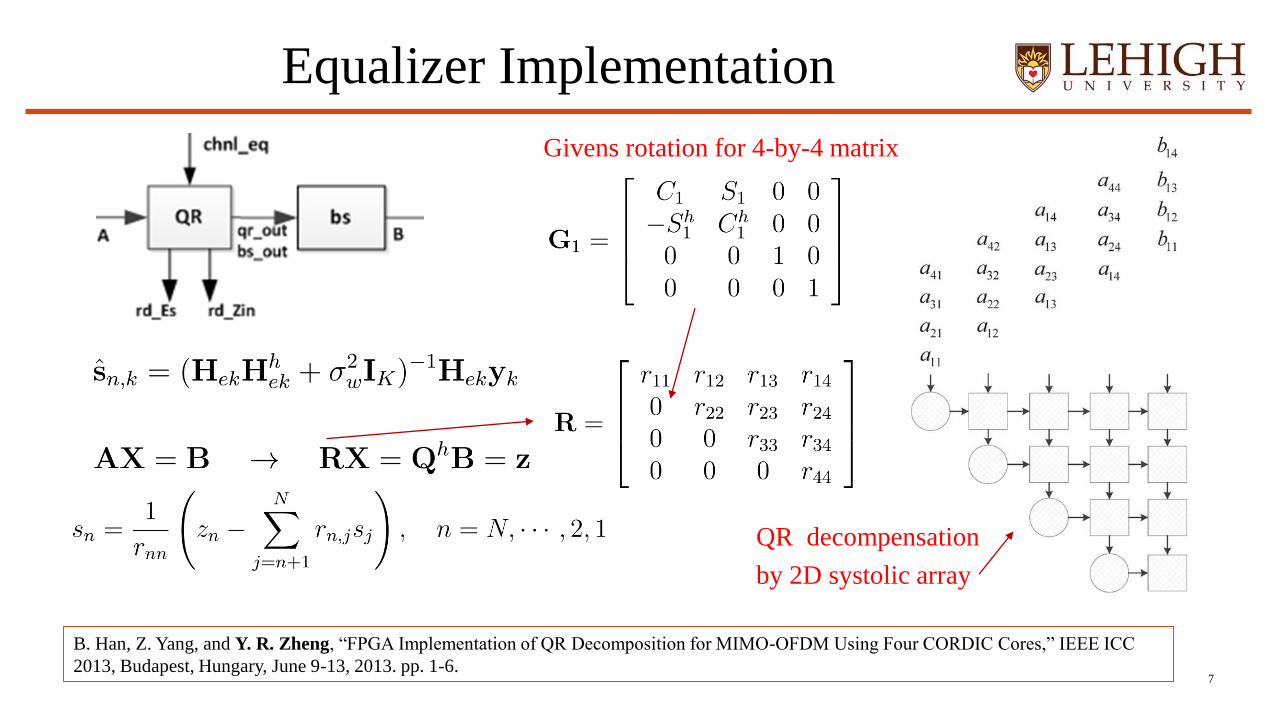
Equalizer Implementation
B. Han, Z. Yang, and Y. R. Zheng, “FPGA Implementation of QR Decomposition for MIMO-OFDM Using Four CORDIC Cores,” IEEE ICC
2013, Budapest, Hungary, June 9-13, 2013. pp. 1-6.
Givens rotation for 4-by-4 matrix
QR decompensation
by 2D systolic array
8
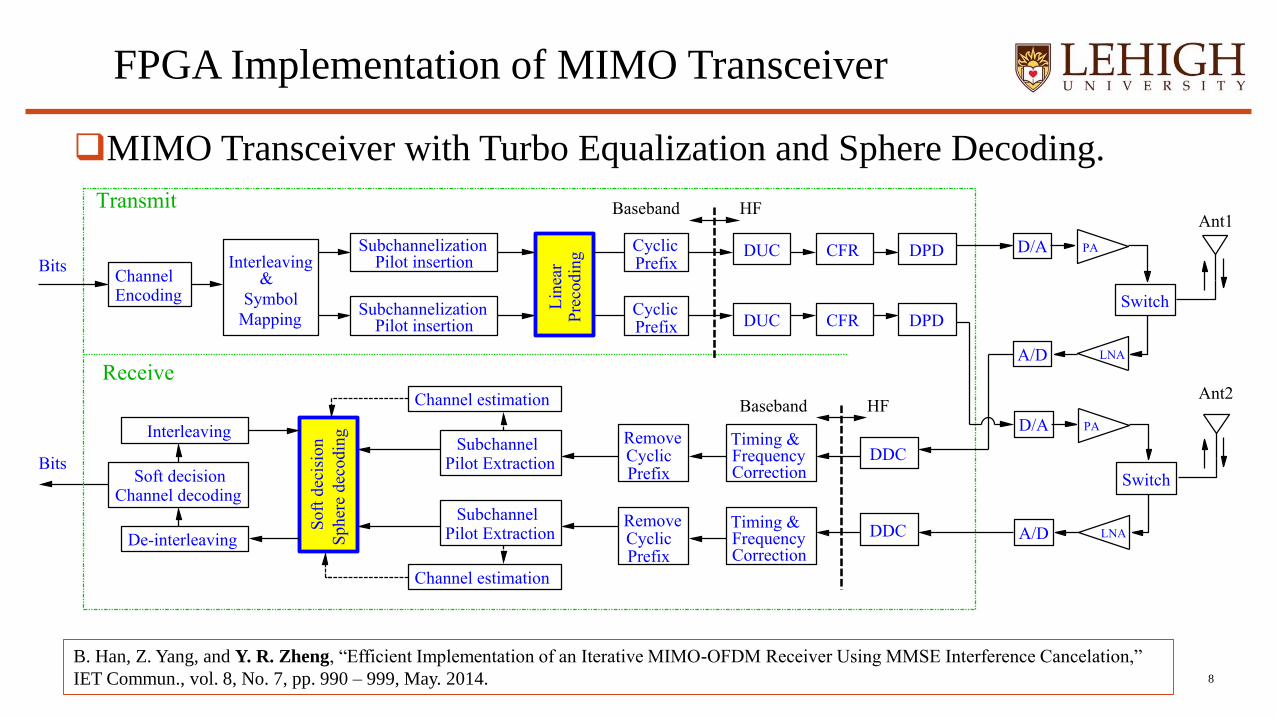
FPGA Implementation of MIMO Transceiver
Channel decodingSoft decision
Channel Encoding
Interleaving
De-interleaving
DPD
DPD
PAD/A
A/D LNA
Switch
Interleaving
Mapping
Symbol
&
SubchannelizationPilot insertion
SubchannelizationPilot insertion
Lin
ear
Pre
cod
ing
CyclicPrefix
CyclicPrefix DUC
DUC CFR
CFR
Pilot ExtractionSubchannel
Pilot ExtractionSubchannel
Channel estimation
Channel estimation
So
ft d
ecis
ion
Sp
her
e d
eco
din
g RemoveCyclicPrefix
RemoveCyclicPrefix
PAD/A
A/D LNA
Switch
FrequencyCorrection
Timing &
FrequencyCorrection
Timing &
DDC
Baseband HF
DDC
Transmit
Bits
Bits
Ant1
Ant2
Baseband HF
Receive
❑MIMO Transceiver with Turbo Equalization and Sphere Decoding.
B. Han, Z. Yang, and Y. R. Zheng, “Efficient Implementation of an Iterative MIMO-OFDM Receiver Using MMSE Interference Cancelation,”
IET Commun., vol. 8, No. 7, pp. 990 – 999, May. 2014.
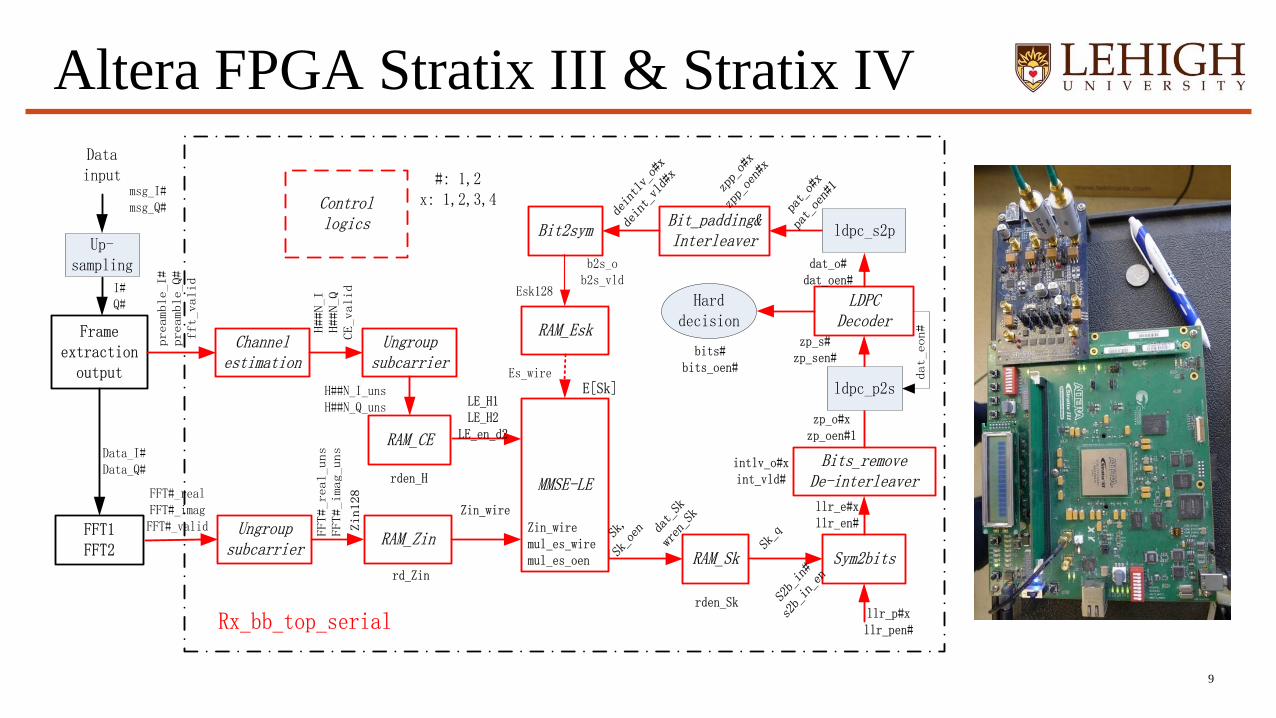
Altera FPGA Stratix III & Stratix IV
FFT1FFT2
RAM_ZinRAM_Sk
RAM_CE
Channel estimation
Frame extraction
output
MMSE-LE
E[Sk]
RAM_Esk
LE_H1LE_H2
LE_en_d2
Zin_wiremul_es_wiremul_es_oen Sym2bits
Ungroupsubcarrier
Bits_remove De-interleaver
LDPCDecoder
Bit_padding&Interleaver
Sk,
Sk_oen
Rx_bb_top_serial
Controllogics Bit2sym
Ungroupsubcarrier
ldpc_p2s
ldpc_s2p
Data input
Up-sampling
msg_I#msg_Q#
I#Q#
Data_I#Data_Q#
preamble_I#
preamble_Q#
fft_valid
H##N_I
H##N_Q
CE_valid
H##N_I_unsH##N_Q_uns
Es_wire
deintlv_o#x
deint_vld#x
Esk128
FFT#_realFFT#_imagFFT#_valid F
FT#_real_uns
FFT#_imag_uns
b2s_ob2s_vld
Zin_wire
pat_o#x
pat_oen#1
llr_e#xllr_en#
S2b_in#
s2b_in_en
bits#bits_oen#
dat_o#dat_oen#
zp_o#xzp_oen#1
zp_s#zp_sen#
Hard decision
Zin128
intlv_o#xint_vld#
zpp_o#x
zpp_oen#x
dat_Sk
wren_Sk
Sk_q
#: 1,2x: 1,2,3,4
dat_eon#
llr_p#xllr_pen#
rd_Zin
rden_Sk
rden_H
9
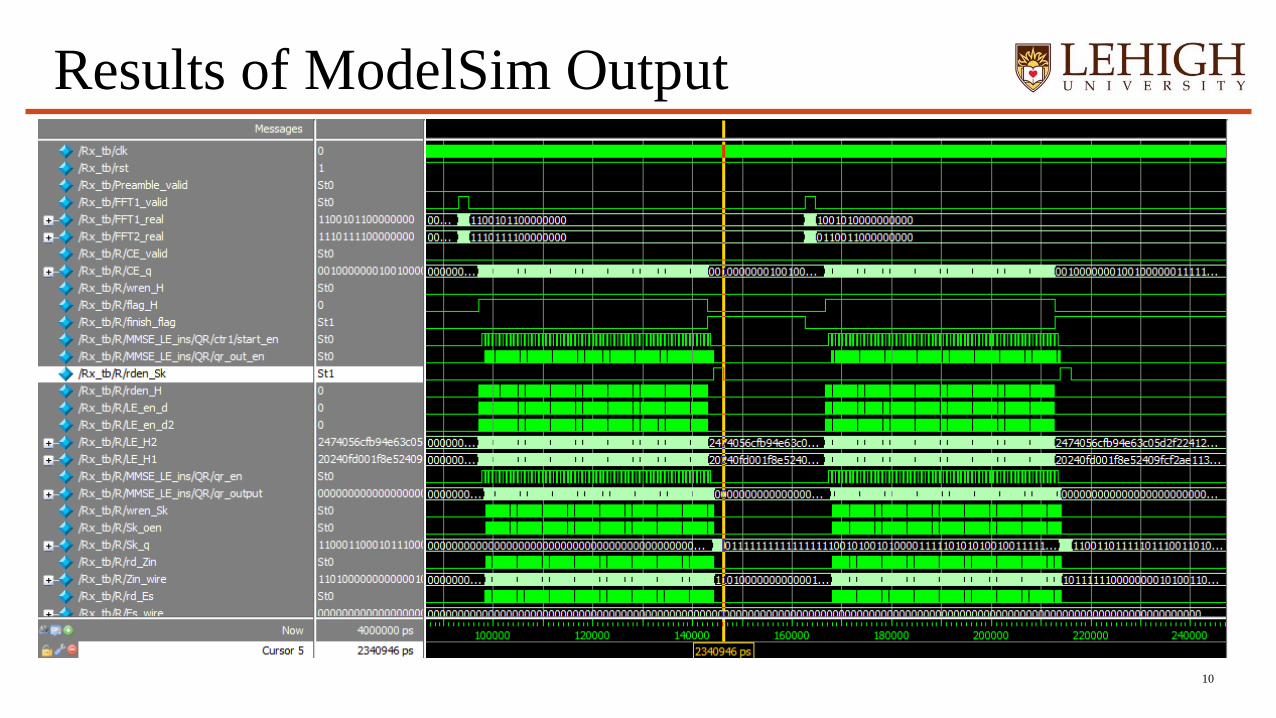
Results of ModelSim Output
10
11
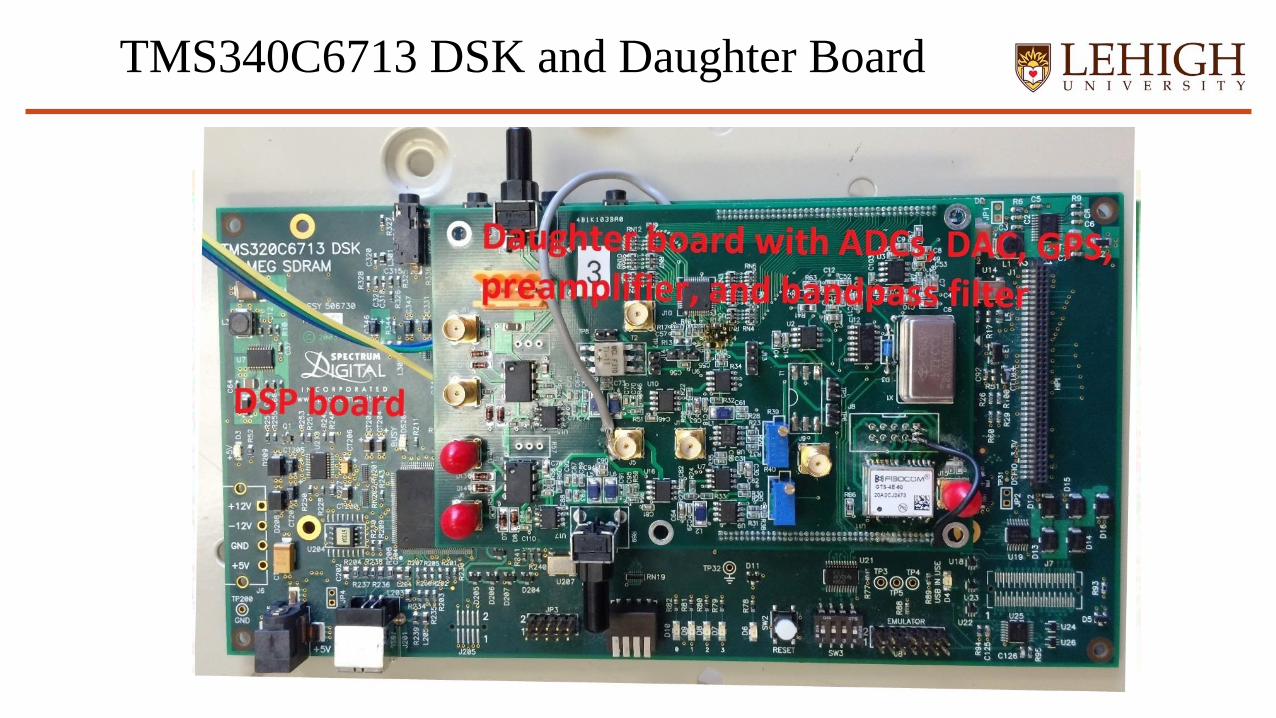
TMS340C6713 DSK and Daughter Board
12
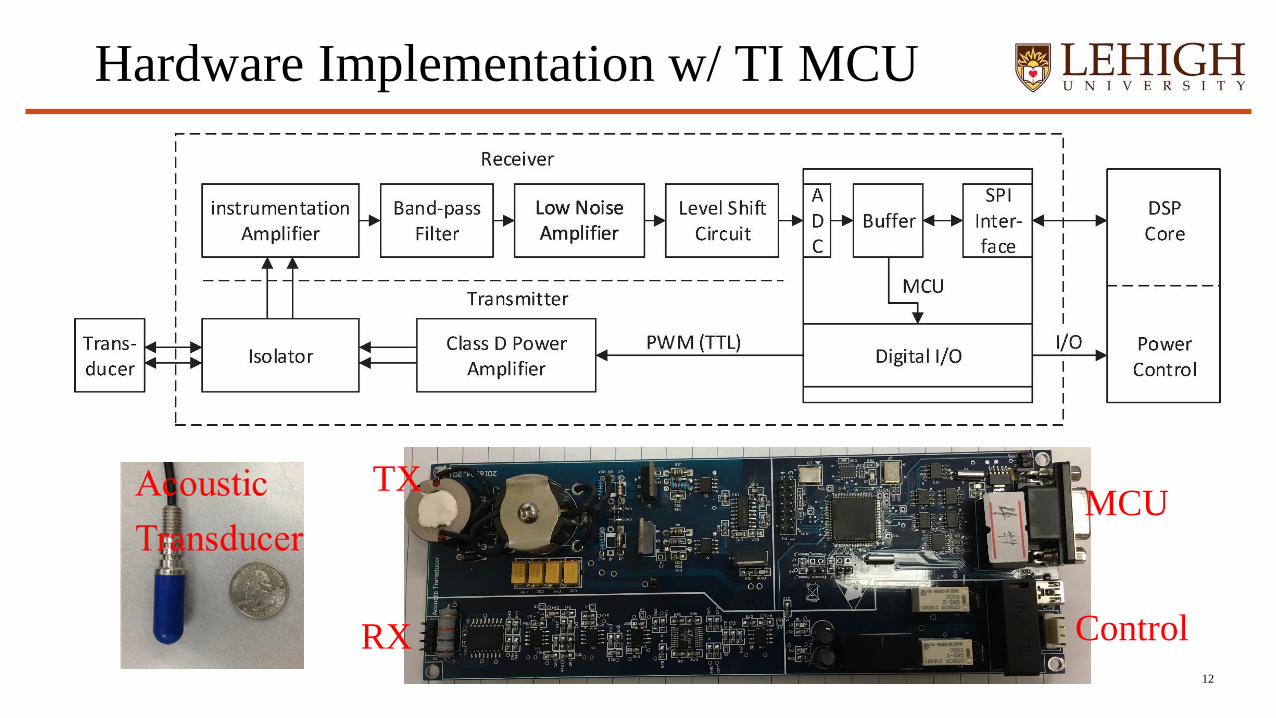
Hardware Implementation w/ TI MCU
TX
RX
MCU
Control
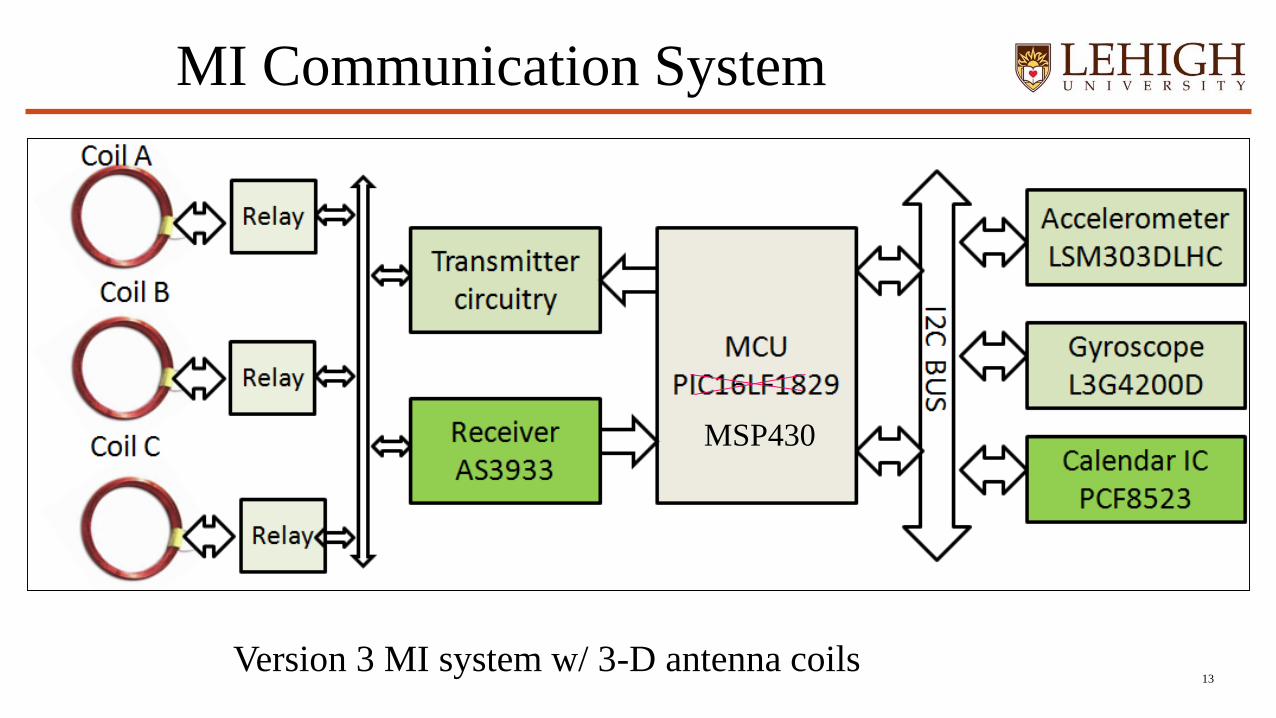
MI Communication System
13Version 3 MI system w/ 3-D antenna coils
MSP430
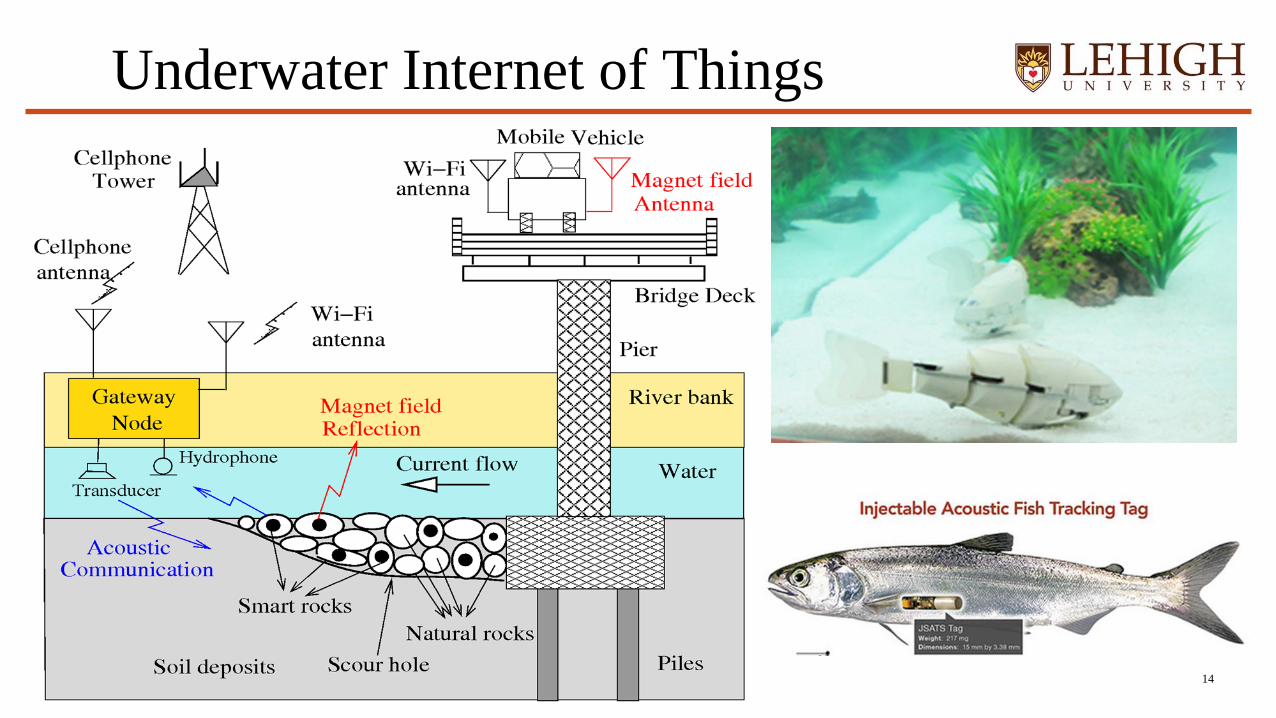
Underwater Internet of Things
14

Bridge Scour Monitoring
15
Rock shells weigh 50 – 200 lb
16
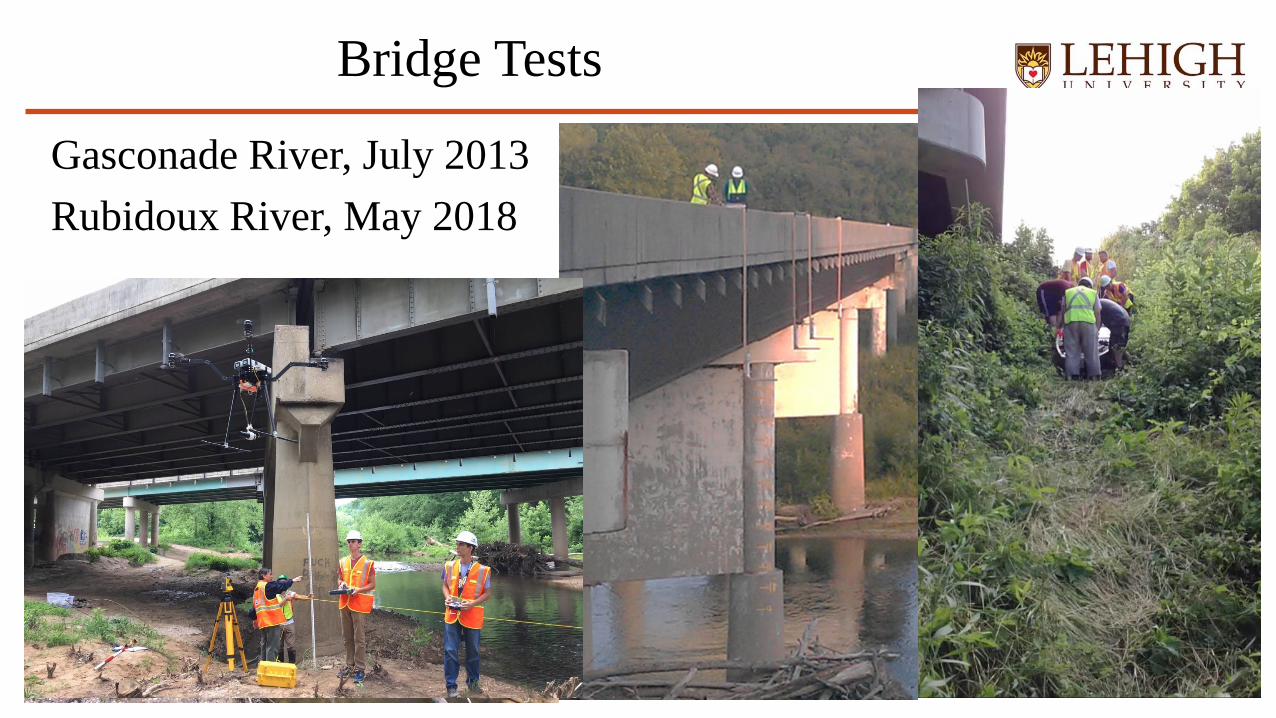
Gasconade River, July 2013
Rubidoux River, May 2018
Bridge Tests
Conclusion and Future Work
❑Two of the three means in underwater wireless communication:
❖Ultrasound (acoustic) communications (Acomm);
❖Magneto-Inductive (MI) Communications.
❑What are the most important factors: reliability, range, data rate,
power consumption, small form factor, cost?
❑Future work:
❖Hardware integration and field test;
❖Innovative network protocols and secure communication.
17