Embed Size (px)
Citation preview
Josh ReissCentre for Digital MusicQueen Mary, University of London
www.elec.qmul.ac.uk/digitalmusic/audioengineering/
UNDER THE HOOD OF A DYNAMIC RANGE COMPRESSOR
With thanks to Michael Massberg and Dimitrios GiannoulisWith thanks to Michael Massberg and imitrios Giannoulis
Questions and Challenges
“No two compressors sound alike... each one is inaccurate in its own unique way” –q yRoey Izhaki, Mixing Audio: Concepts, Theory and Practice
Given how a compressor is used, how can you build one?
How can you emulate an analog design?
What makes compressors sound different?
Why do attack and release times mean different things for different compressors?p
How can you measure the performance of a compressor?

What we’re not going to talk aboutHow to use a dynamic range compressorPreferred parameter settings for different tasksPreferred parameter settings for different tasks
How not to use a dynamic range compressor (Loudness war)(Loudness war)But will show how better design helps prevent misuse
Hearing aidsStill applicable, but we’re concerned with compressors for pp pmusic production, mastering and broadcast
Sidechaining and parallel compressionSidechaining and parallel compression
Multiband compressiondd lAdditional parametersLook‐ahead, hold...
Introducing the dynamic range compressormap dynamic range of audio signal to smaller range Reduce signal level of higher peaks while leaving quieter g g p g qparts untreatedThen (optionally) boosting whole signal to make it asThen (optionally) boosting whole signal to make it as loud as, or louder than, original uncompressed signal
Unlike gain delay EQ panningUnlike gain, delay, EQ, panning... Poorly definedNot always agreed what compression parameters do
An adaptive audio effectAction of the compressor depends on the input signal
NonlinearNonlinearGenerally noninvertible

Compressor ControlsThreshold‐ T
level above which compression starts
Ratio‐ Rdetermines the amount of compression applied.p pp
Knee Width‐ WControls transition in the ratio around the thresholdControls transition in the ratio around the threshold
Make‐up Gain‐ MU d t t h th t t i l’ ll l d t th i i lUsed to match the output signal’s overall loudness to the original
Attack Time‐ τATime to decrease gain once signal overshoots threshold
Release Time‐ τRRTime to bring gain back to normal once signal falls below threshold
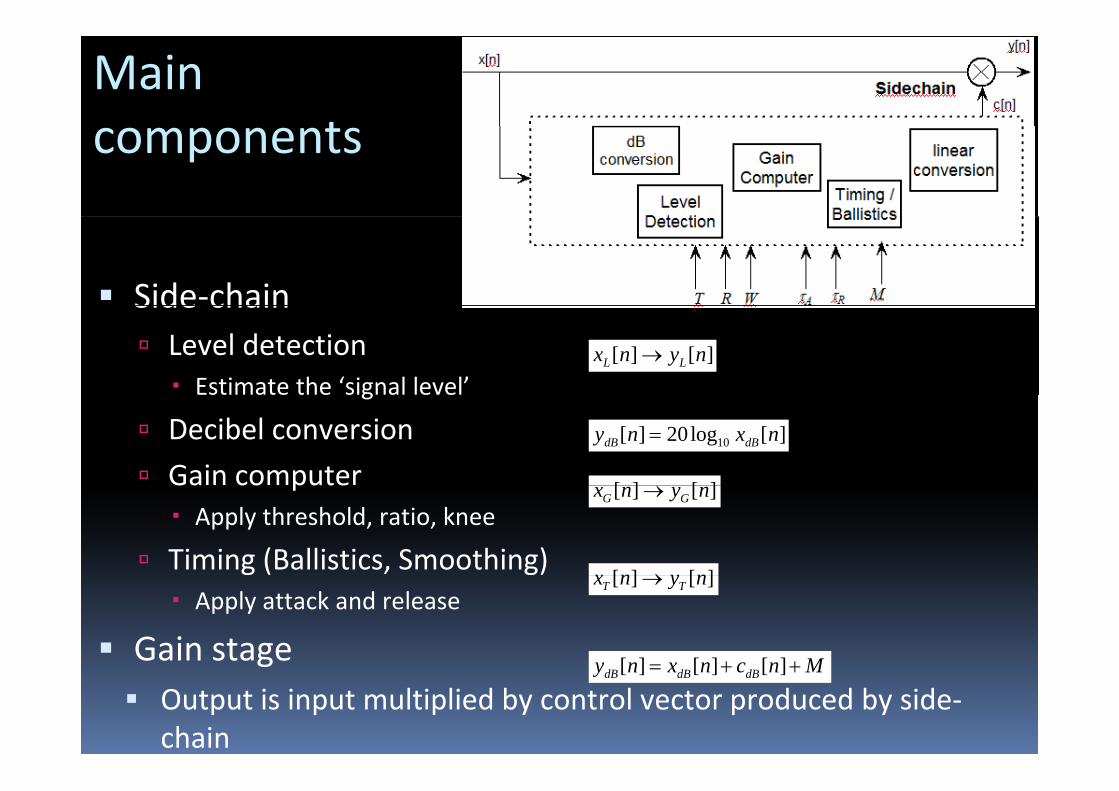
Main tcomponents
Side‐chainSide chainLevel detectionEstimate the ‘signal level’
[ ] [ ]L Lx n y n→
g
Decibel conversion
Gain computer [ ] [ ]
10[ ] 20log [ ]dB dBy n x n=
Ga co puteApply threshold, ratio, knee
Timing (Ballistics, Smoothing)
[ ] [ ]G Gx n y n→
[ ] [ ]x n y n→Apply attack and release
Gain stage [ ] [ ] [ ]y n x n c n M= + +
[ ] [ ]T Tx n y n→
gOutput is input multiplied by control vector produced by side‐chain
[ ] [ ] [ ]dB dB dBy n x n c n M= + +

Level Detection – the options
Peak vs RMSPeak detection Based on absolute value of the signalPeak detection ‐ Based on absolute value of the signal
RMS B d f th i l
[ ] | [ ] |L Ly n x n=
RMS ‐ Based on square of the signalSquare of the level is average of square of the input
/ 2 11 M
Or Square of the level is smoothed estimate of square of the input
/ 2 12 2
/2
1[ ] [ ]M
L Lm M
y n x n mM
−
=−
= −∑
q q p2 2 2[ ] (1 ) [ 1] [ ]L L Ly n y n x nα α= − − +

Exponential Moving Average Filter
Also known as smoothing filter one pole low pass filter
[ ] [ 1] (1 ) [ ]y n y n x nα α= − + −
Also known as smoothing filter, one pole low pass filter...
Step response[ ] 1 for [ ] 1, 1ny n x n nα= − = ≥
Time constant ‐ time it takes a system to reach 1‐1/e= 63%
y
y /of its final value 1[ ] 1 1sf
sy f eττ α −= − = −→
1/ sfe τα −=
Issues with RMS level detection
Introduces significant delayIntroduces significant delay
Introduces additional parameter, M or τSeveral studies suggest general behaviour is the same for peak & RMS detection
F. Floru, "Attack and Release Time Constants in RMS‐Based Feedback Compressors," Journal of the Audio Engineering Society, l 47 788 804 O t b 1999vol. 47, pp. 788‐804, October 1999.
J. S. Abel and D. P. Berners, "On peak‐detecting and rms feedback and feedforward compressors " in 115th AES Convention 2003and feedforward compressors, in 115th AES Convention, 2003.

The Gain Computer
Static Compression Curve
0
10
-5
0
dB)
Knee Width
-20
-15
-10
y G (
-30
-25
20
GainMake-up No compression
5:1 compression, hard knee5 1 i ft k
-40
-35
5:1 compression, soft knee
-45-45 -40 -35 -30 -25 -20 -15 -10 -5 0
xG (dB)
Threshold

The Gain Computer-15
-10
-5
0
y G (d
B)
Knee Width
Compression ratio-30
-25
-20
-15
GainMake-up No compression
5:1 compression, hard knee 5:1 compression, soft kneeCompression ratio
Hard knee GG
x TR for x T
y T−
= > -45
-40
-35
-45 -40 -35 -30 -25 -20 -15 -10 -5 0x (dB)
Threshold
Gy T−
( ) /G G
GG G
x x Ty
T x T R x T≤⎧
= ⎨ + − >⎩
xG (dB)
Soft kneeLinear interpolation (bad)
2( )/ 2 ( / 2)(1 1/ ) / 2 2 | ( ) |
( ) / 2( )
G G
G G G
G G
x x T Wy T W x T W R x T W
T x T R x T W
− < −⎧⎪= − + − + + − ≤⎨⎪ + − − >⎩
Second order interpolation (good)
2
2( )G Gx x T W− < −⎧⎪ 2(1/ 1)( / 2) / (2 ) 2 | ( ) |
( ) / 2( )G G G G
G G
y x R x T W W x T WT x T R x T W
⎪= + − − + − ≤⎨⎪ + − − >⎩

Time constantsFrom the smoothing filter
Officially, time it takes a system to reach 1‐1/e= 63% of y, y / %its final valueτ – level starts at 0 goes to 1 Attack time is the time itτA – level starts at 0, goes to 1. Attack time is the time it takes for level to reach 0.63.
τ – level starts at 1 goes to 0 Release time is the time itτR – level starts at 1, goes to 0. Release time is the time it takes for level to reach 1‐0.63=0.37.
But some compressorsBut some compressors,Miscalculate it
Define it as time to go from 90% of initial value to 10% of final value
Define it as time to change level by so many dBs
...
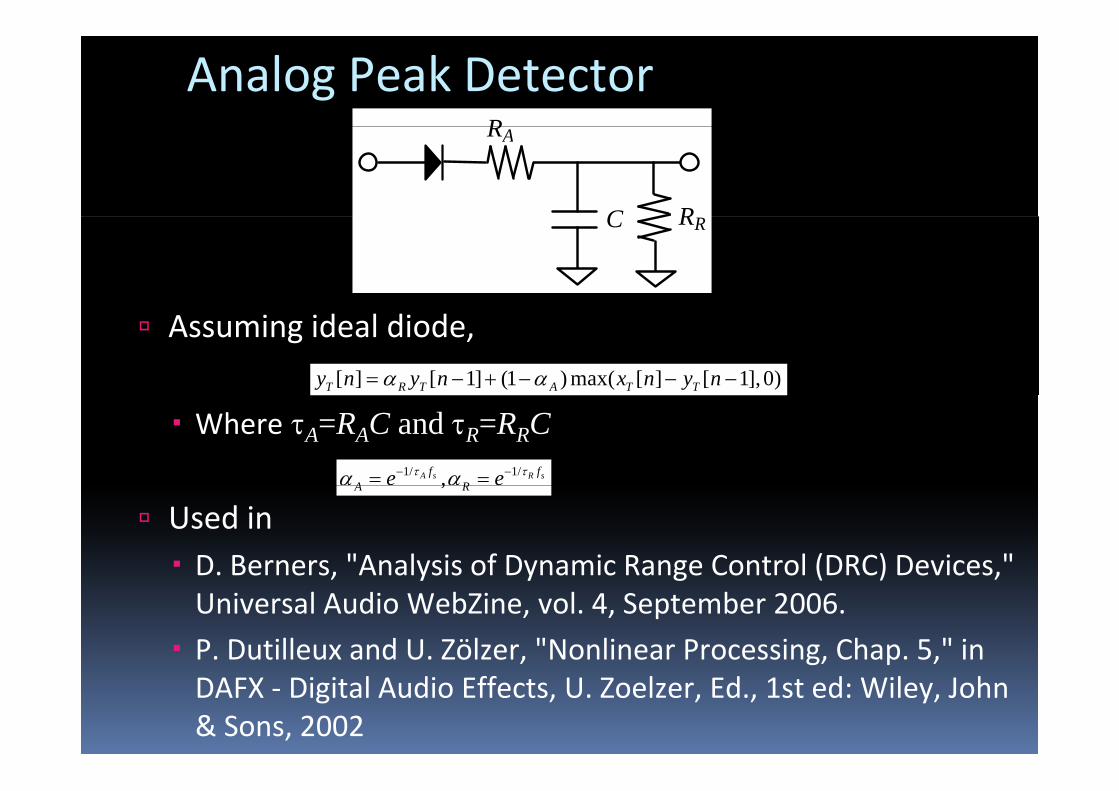
Analog Peak DetectorRRA
RC RRC
Assuming ideal diode,[ ] [ 1] (1 ) max( [ ] [ 1],0)T R T A T Ty n y n x n y nα α= − + − − −
Where τA=RAC and τR=RRC1/ 1/,A s R sf f
A Re eτ τα α− −= =
Used inD. Berners, "Analysis of Dynamic Range Control (DRC) Devices,"
,A R
D. Berners, Analysis of Dynamic Range Control (DRC) Devices, Universal Audio WebZine, vol. 4, September 2006.
P. Dutilleux and U. Zölzer, "Nonlinear Processing, Chap. 5," in g pDAFX ‐ Digital Audio Effects, U. Zoelzer, Ed., 1st ed: Wiley, John & Sons, 2002

Analog Peak Detector 1.0
Input signalP k d t t 50 l ti0.9
0.8
0.7
0.6e
Peak detector, 50ms release time Peak detector, 200ms release time Peak detector, 500ms release time
0.6
0.5
0.4
0.3
Volta
g
0.2
0.1
0.01.00.90.80.70.60.50.40.30.20.10.0
Time (sec)Time (sec)
Step response1
0
1[ ] (1 ) ( 1)
2
nm A R
A R Am R A R A
y nα τ
α α αα α τ τ
−
=
−= − + − → ≈
− − +∑
correct peak estimate only when release time is considerably longer than attack timeattack time gets slightly scaled by release timefaster attack time than expected when we use a fast releasefaster attack time than expected when we use a fast release time
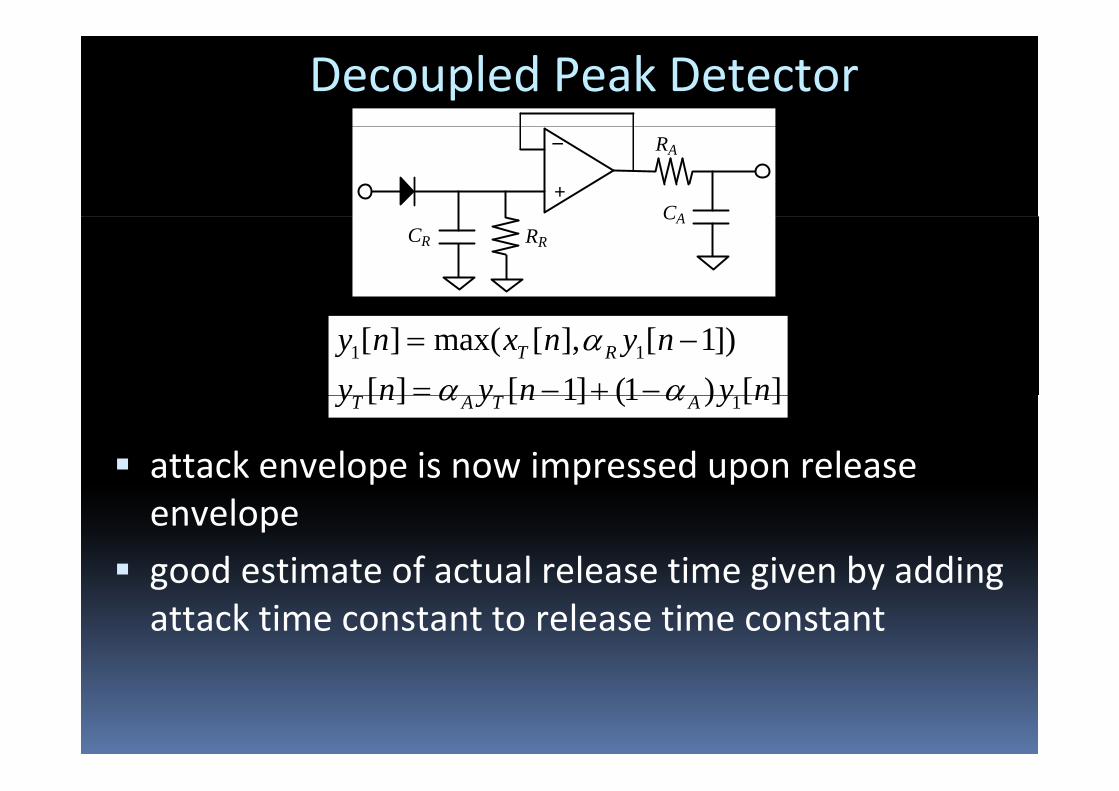
Decoupled Peak Detector_
+
RA
CARRCR
CA
1 1[ ] max( [ ], [ 1])[ ] [ 1] (1 ) [ ]
T Ry n x n y ny n y n y n
αα α
= −= − + − 1[ ] [ 1] (1 ) [ ]T A T Ay n y n y nα α+
attack envelope is now impressed upon release envelope
good estimate of actual release time given by addinggood estimate of actual release time given by adding attack time constant to release time constant
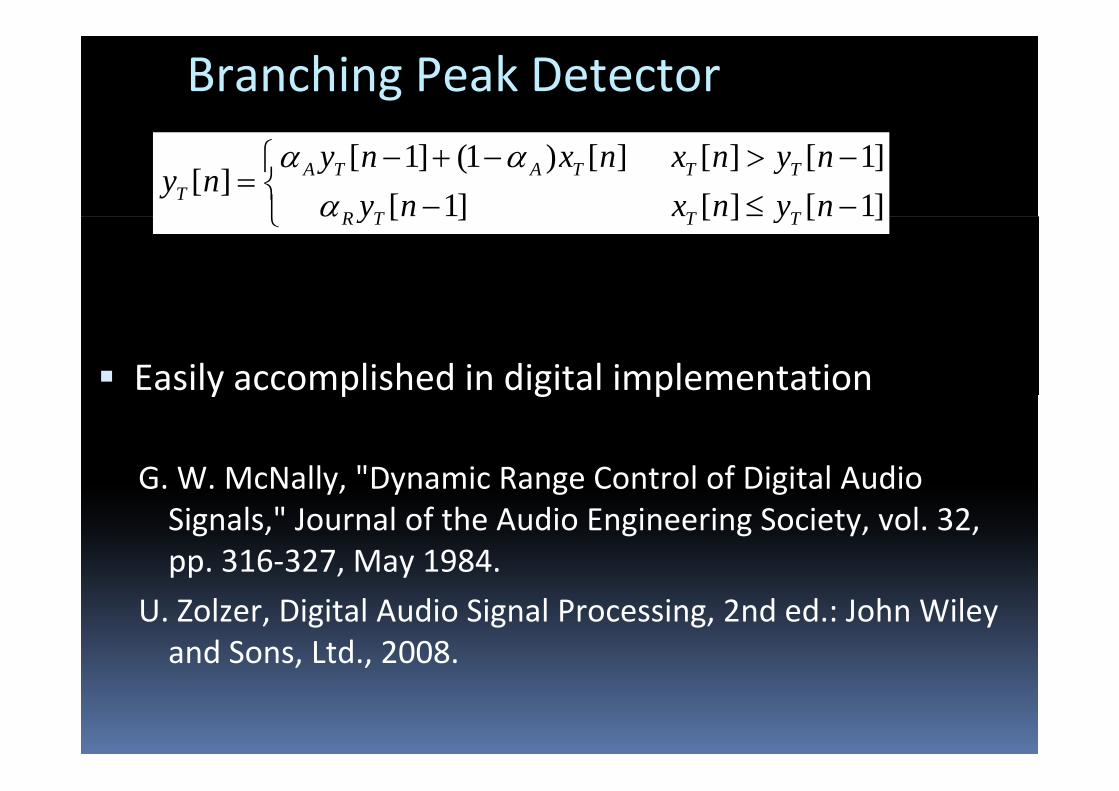
Branching Peak Detector[ 1] (1 ) [ ] [ ] [ 1]
[ ][ 1] [ ] [ 1]
A T A T T TT
R T T T
y n x n x n y ny n
y n x n y nα α
α− + − > −⎧
= ⎨ − ≤ −⎩ [ 1] [ ] [ 1]R T T Ty n x n y nα ≤⎩
Easily accomplished in digital implementationy p g p
G. W. McNally, "Dynamic Range Control of Digital AudioG. W. McNally, Dynamic Range Control of Digital Audio Signals," Journal of the Audio Engineering Society, vol. 32, pp. 316‐327, May 1984.pp , y
U. Zolzer, Digital Audio Signal Processing, 2nd ed.: John Wiley and Sons, Ltd., 2008., ,

Time constants in decoupled & branching peak detectors1.0
0.9
0.8
Input Signal Decoupled, τA=100ms, τR=200ms Branching, τA=100ms, τR=300ms Decoupled, τA=100ms, τR=100ms
0.7
0.6
0 5nal L
evel
Branching, τA=100ms, τR=200ms
0.5
0.4
0.3
Sign
0.2
0.1
0.01.00.90.80.70.60.50.40.30.20.10.0
Time (sec)
Output of decoupled and branching peak detector circuitsOutput of decoupled and branching peak detector circuits for different release time constantsbranching peak detector produces intended release time constantbranching peak detector produces intended release time constantdecoupled peak detector produces measured time constant ~ τA+τR.

Smooth, level corrected peak detector
[ ] max( [ ] [ 1] (1 ) [ ])y n x n y n x nα α= − + −
Smooth decoupled peak detector
1 1
1
[ ] max( [ ], [ 1] (1 ) [ ])[ ] [ 1] (1 ) [ ]
T R R T
T A T A
y n x n y n x ny n y n y n
α αα α
= += − + −
S h b hi k dSmooth branching peak detector[ 1] (1 ) [ ] [ ] [ 1]
[ ] A T A T T Ty n x n x n y ny n
α α− + − > −⎧⎨[ ]
[ 1] (1 ) [ ] [ ] [ 1]LR T R T T T
y ny n x n x n y nα α
= ⎨ − + − ≤ −⎩
Used inUsed inP. Dutilleux, et al., "Nonlinear Processing, Chap. 4," in Dafx:Digital Audio Effects, 2nd ed: Wiley, 2011, p. 554.Dafx:Digital Audio Effects, 2nd ed: Wiley, 2011, p. 554.
U. Zolzer, Digital Audio Signal Processing, 2nd ed.: John Wiley and Sons, Ltd., 2008., ,

Comparison of Digital Peak DetectorsAll envelopes reach maximum peak value and feature similar attack trajectoriesRelease envelopes too short for decoupled and branching peak detectors
smoothed versions make full use of release time
Discontinuity for smooth, branching peak detector
1.0
y g pabrupt switch from attack to releaserelease envelope is continuous for smoothed, decoupled peak detector
0.9
0.8
1.0
0 9
Inset
0.7
0.6
l Lev
el
0.9
0.80.350.300.25
0.5
0.4
0 3
Sign
al
Input Decoupled Branching Decoupled, smoothB hi S th0.3
0.2
0.1
Branching, Smooth
0.1
0.01.00.90.80.70.60.50.40.30.20.10.0
Time (ms)

Feedforward or feedback design
Feedforward
( ) /dB dB dB
dB dB
y c xy T x T R
= +
= + −
→(1/ 1)( )dB dBc R x T
→= − −
Feedback
( ) /dB dB dB
dB dB
y c xy T x T R
= +
= + −
→
Limiter (ratio of∞: 1) needs infinite negative amplification
(1 )( )dB dBc R y T= − −
Limiter (ratio of : 1) needs infinite negative amplification
Not designed for look‐ahead

Sidechain configuration
[ ] [ ]L Lx n y n→
10[ ] 20 log [ ]dB dBy n x n=
Level detection
Decibel conversion[ ] [ ]G Gx n y n→
[ ] [ ]x n y n→
Decibel conversion
Gain computer
Timing (Ballistics Smoothing) [ ] [ ]T Tx n y n→Timing (Ballistics, Smoothing)

Timing Placement‐ linear domain
[ ] [ ]T Lx n y n=
10[ ] 20log [ ][ ] [ ] [ ]
G L
dB G G
x n y nc n y n x n M
=
= − +
R. J. Cassidy, "Level Detection Tunings and Techniques for the Dynamic Range Compression of Audio Signals," in 117th AES Convention, 2004.
J S Ab l d D P B "O k d t ti d f db k dJ. S. Abel and D. P. Berners, "On peak‐detecting and rms feedback and feedforward compressors," in 115th AES Convention, 2003.
U. Zolzer, Digital Audio Signal Processing, 2nd ed.: John Wiley and Sons, Ltd., 2008., g g g, y , ,
P. Hämäläinen, "Smoothing of the Control Signal Without Clipped Output in Digital Peak Limiters," in International Conference on Digital Audio Effects (DAFx), Hamburg Germany 2002 pp 195 198Hamburg, Germany, 2002, pp. 195‐198.
S. J. Orfanidis, Introduction to Signal Processing Orfanidis (prev. Prentice Hall), 2010.

Timing Placement‐ biased linear domain
/ 20[ ] | [ ] | 10TT Lx n x n= −
/ 2010[ ] 20 log ( [ ] 10 )
[ ] [ ] [ ]
T LT
G T
dB G G
x n y nc n y n x n M
= +
= − +dB G G
Attack and release now depend on threshold, not zero
Envelope smoothly fades out once signal falls below threshold

Timing Placement‐ linear domain, post‐gain
10( [ ] [ ] )/ 20
[ ] 20log [ ]
[ ] 10 G G
G Ly n x n M
x n x n
x n − +
=
= ( [ ] [ ] )[ ] 10[ ] [ ]
G GyT
T
x nc n y n
==
J Bit d D S h idt "P t E ti ti f D iJ. Bitzer and D. Schmidt, "Parameter Estimation of Dynamic Range Compressors: Models, Procedures and Test Signals," presented at the 120th AES Convention 2006presented at the 120th AES Convention, 2006
L. Lu, "A digital realization of audio dynamic range control," in Fourth International Conference on Signal Processing g gProceedings (IEEE ICSP), 1998, pp. 1424 ‐ 1427.

Timing Placement‐ log (dB) domain
10[ ] 20log [ ]G Lx n x n=
S W i d W X "FPGA i l t ti f i l l ti i
[ ] [ ] [ ][ ] [ ]
T G G
dB T
x n x n y nc n M y n
= −
= −
S. Wei and W. Xu, "FPGA implementation of gain calculation using a polynomial expression for audio signal level dynamic compression," J Acoust Soc Jpn (E) vol 29 pp 372‐377 2008J. Acoust. Soc. Jpn. (E), vol. 29, pp. 372 377, 2008.
S. Wei and K. Shimizu, "Dynamic Range Compression Characteristics Using an Interpolating Polynomial for Digital Audio Systems," IEICE g p g y g y ,Trans. Fundamentals, vol. E88‐A, pp. 586‐589, 2005.
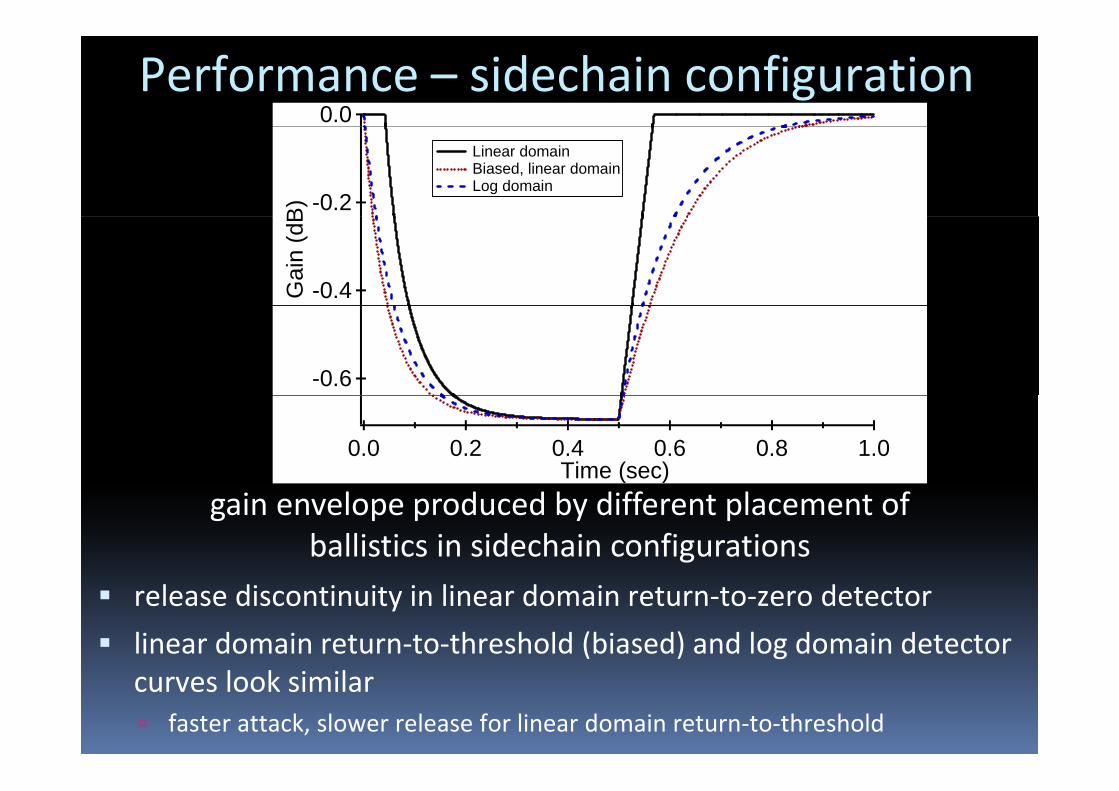
Performance – sidechain configuration0.0
-0.2B)
Linear domain Biased, linear domain Log domain
-0.4Gai
n (d
B
-0.6
1.00.80.60.40.20.0Time (sec)
gain envelope produced by different placement of ballistics in sidechain configurations
release discontinuity in linear domain return‐to‐zero detector
linear domain return‐to‐threshold (biased) and log domain detector curves look similar
faster attack, slower release for linear domain return‐to‐threshold
Performance‐ ArtifactsHow can we measure and characterise performance of a compressor?
Most artifacts associated with parameter settings, not designg
DropoutsLong release ‐> keeps attenuating after transient finished
OvershootLong attack ‐> misses attenuation of initial transient
Lack of clarityShort attack ‐> squash all transients
PumpingShort release ‐> jump in signal level after transient
B hiBreathingNoticeable movement of noise floor

Performance‐ Noise and DistortionSignal to Noise RatioSignal to Noise RatioNot useful
Total Harmonic DistortionMeasures strength of harmonics (introduced by
28
g ( ycompression) in relation to original frequency
24
20
(%)
Compressor Design
16
12
THD
( g Branching Decoupled Branching Smooth Decoupled Smooth
8
4
0
102 103 104
Frequency (Hz)
Performance – frequency dependenceEffective compression ratioused in assessing compressors in cochlear implants and g p phearing aids
amplitude modulated sine wave applied at inputamplitude modulated sine wave applied at input
i f i d id b d[ ] (1 cos(2 ))cos(2 )m cx n m f n f nπ π= +
spectrum consists of a carrier and two side bands
ΔSi difference between amplitude of side bands and amplitude of carrier of input signal
ΔSo difference between amplitude of side bands and o pamplitude of carrier of compressed signal is found,.
effective compression ratio is then given by ΔSi/ΔS .effective compression ratio is then given by ΔSi/ΔSo.

Performance – effective compression ratio66.5
6.0
5 5Rat
io Compressor Design Branching
5.5
5.0
4 5pres
sion
Decoupled Branching Smooth Decoupled Smooth
4.5
4.0
3.5ve C
omp
3.0
2.5Effe
ctiv
2.0
3632282420161284
Interpretation?
3632282420161284Modulation Frequency (Hz)

Performance‐ Ballistics and sidechain configurationDetector Fidelity of Envelope Shape (FES)Detector
Placement Detector Typey p p ( )
Guitar Bass Drums Vocals
Branching 0.884 0.945 0.766 0.952
Decoupled 0.899 0.932 0.755 0.941
Fid lit f th Logdomain Branching Smooth 0.852 0.927 0.640 0.941
Decoupled Smooth 0 859 0 911 0 648 0 936
Fidelity of the envelope shape
Decoupled Smooth 0.859 0.911 0.648 0.936
Branching 0.836 0.879 0.517 0.932
Decoupled 0.790 0.831 0.537 0.930
Lineardomain Branching Smooth 0.825 0.856 0.456 0.932
Decoupled Smooth 0 775 0 805 0 461 0 934Decoupled Smooth 0.775 0.805 0.461 0.934
Measures correlation between envelopes of compressed and uncompressed signalsuncompressed signals
Nonsmooth designs do well since they often apply no compression
Pl i b lli ti ( tt k d l ) i l d i t fPlacing ballistics (attack and release) in log domain outperforms placing them in linear domain

Pseudocode% Smoothed branching digital dynamic range compressor.
% Parameters
% x: input signal
% fs: sample rate (kHz)
% tauAttack: attack time constant (ms)
% tauRelease: release time constant (ms)
% T l ith i th h ld% T: logarithmic threshold
% R: compression ratio
% W: decibel width of the knee transistion% W: decibel width of the knee transistion
% M: decibel Make-up Gain
% Returns
% y: output (compressed) signal
%LEVEL DETECTION
y_L = max(abs(x), 1e-6);
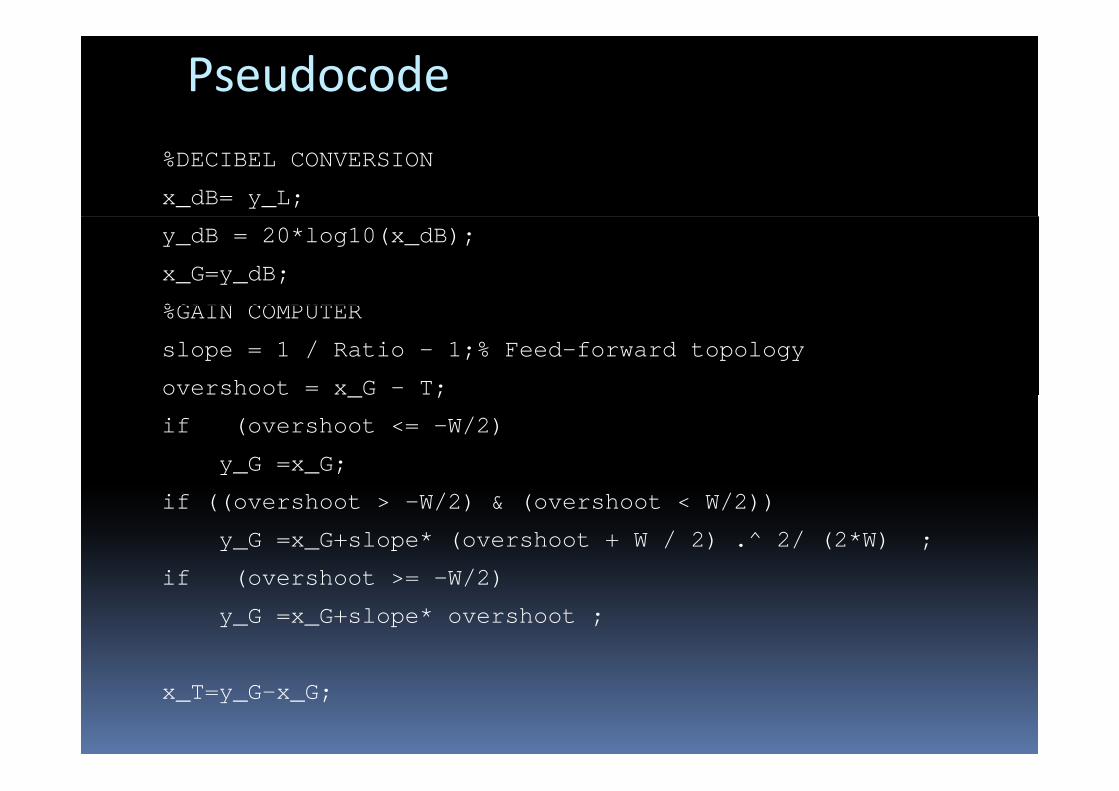
Pseudocode%DECIBEL CONVERSION
x_dB= y_L;
y_dB = 20*log10(x_dB);
x_G=y_dB;
%GAIN COMPUTER%GAIN COMPUTER
slope = 1 / Ratio - 1;% Feed-forward topology
overshoot = x G - T;_ ;
if (overshoot <= -W/2)
y_G =x_G;
if ((overshoot > -W/2) & (overshoot < W/2))
y_G =x_G+slope* (overshoot + W / 2) .^ 2/ (2*W) ;
if (overshoot > W/2)if (overshoot >= -W/2)
y_G =x_G+slope* overshoot ;
x_T=y_G-x_G;
Pseudocode%BALLISTICS%BALLISTICS
alphaAtt = exp(‐1 / (tauAttack * fs));
alphaRel = exp(‐1 / (tauRelease * fs));
if x_T(0) > 0
y_T(0) = (1‐alphaAtt)*x_T(0);
elseelse
y_T(0) = (1‐alphaRel)*x_T(0);
end
for i=2:length(x_T)
if x_T(i) > y_T(i‐1)
y_T(i)= alphaAtt * y_T(i‐1) + (1‐alphaAtt)*x_T(i);
else
y_T(i)= alphaRel * y_T(i‐1) + (1‐alphaRel)*x_T(i);
dend
end
c_dB = M‐y_T; %CONTROL VECTOR, WITH MAKE‐UP GAIN
gain = 10.^(c_dB./20); %CONVERT TO LINEAR
y = x .* gain; %GAIN STAGE

The big unknown – psychoacousticsCompressor designs in the literature: >20in the literature: >20
Commercial designs: >40
Studies of parameter settingsStudies of parameter settings for hearing aids: >10
for music production and broadcast: 0 ?Anecdotal recommendations : 10?
Studies of compressor designs for hearing aids: <5?for hearing aids: <5?
for music production and broadcast: 0 !
Recommendations
Feedforward compressors are preferred bl d di bl h f db k d imore stable and predictable than feedback designs
Benefits of feedback designs are only relevant in analog
Peak level detection suggested over RMSRMS introduces additional parameterOften not user controlled
Smoothing done anyway by attack and release
May introduce unnecessary delay
Soft knee with high order interpolationSoft knee with high order interpolationLinear interpolation gives two hard knees

RecommendationsBallistics in the log domain after the gain computerBallistics in the log domain after the gain computer
Maintain envelope shape
tt k lno attack lag
easy implementation of variable knee width
Smooth, peak detector for attack and releaseDecoupled Low harmonic distortion
Prevent discontinuities
Branchingdetailed knowledge of the effect of the time constants
d h l f hMinor discontinuities in the slope of the gain curve
Make‐up gain at end of side‐chainAgrees with expected use
Not intended or needed to be smoothed

ThanksMichael Massberg
See his talk this afternoon, at 2:30pm
“Digital Low‐Pass Filter Design with Analog Matched Magnitude Response”
Dimitrios Giannoulis





























