Embed Size (px)
Citation preview

A Simple Series Battery/Ultracapacitor Drive System for Light Vehicles and Educational Demonstration
Shane Colton
Edgerton Center Summer Engineering WorkshopMassachusetts Institute of Technology, Cambridge, Massachusetts, United States of America
E-mail: [email protected]
Copyright © 2009 MC2D & MITI
Abstract: This paper presents a simple configuration for a combined battery/ultracapacitor motor drive system, developed during a student engineering workshop. The ultracapacitor, placed in series with the battery and DC/DC converter, instead of in parallel, still serves to reduce periods of high current demand on the battery during acceleration and braking. Though this configuration limits the available power transfer paths, it can be simpler, lighter, and more cost effective, especially for lightDC-drive vehicles. It is also more intuitive, making it an ideal educational demonstration of the technology. We built and tested an experimental vehicle, based on a go-kart with a separately-excited DC motor, to evaluate this configuration. The vehicle achieves effective kinetic energy recovery of higher than 30%, with selectable improvements in power, speed, and/or range.
Keywords: battery, ultracapacitor, series configuration, separately-excited DC motor, regenerative braking, launch assist, light vehicles, education
1. Introduction
Research into automotive applications of capacitors has led to the development of ultracapacitors with increasing energy density and decreasing cost. Their high power density and charge cycle lifetime allow ultracapacitors to be used effectively as supplemental energy storage to reduce the load on batteries in hybrid-electric and fully-electric vehicles. This is particularly important for regenerative braking, where large charging currents can otherwise significantly reduce battery lifetime[1]. The electrical characteristics of a combined battery-ultracapacitor system match well with the high ratio of peak-to-average power demands in many driving scenarios, and a combined system can reduce both the total size and cost of a vehicle energy storage unit, as well as increase battery lifetime [2].
Typically, batteries and ultracapacitors are used in a parallel configuration. Power loads are shared by a simple switch/diode selection
circuit [3] or a more complex state-driven DC/DC power split [4,5]. In these configurations, the voltage of the ultracapacitor module is often near that of the batteries. While this facilitates power transfer between the two energy storage elements, it also requires a relatively large ultracapacitor module with many cells in series. These systems may use one or two DC/DC converters capable of both boost and buck operation [6].
In our student engineering workshop, we sought to create a small-scale experimental vehicle, based on a go-kart, that would serve both as a research platform for a combined battery/ultracapacitor energy storage system and as an educational tool. The project team was a collaboration of university and high school students and one of the important design requirements was that the methods employed be easily explained to students interested in engineering and transportation. Additionally, the nature of the project
March 26-29

demanded low-cost components and simple assembly.
Working toward these requirements, we converged on a series configuration battery/ultracapacitor drive system that reduced the system cost and complexity significantly. The primary benefits of acombined energy storage system, including effective kinetic energy recovery, are preserved, although some modes of power transfer are sacrificed. The overall gains certainly outweigh the tradeoffs in oureducational application, and may be usefulmore generally. Light vehicles such as go-karts, golf carts, and neighborhood electric vehicles (NEVs) may be able to use a similar system. These vehicles typically have tight cost constraints that may otherwise prohibit the use of regenerative braking, and this system may serve as an inexpensive performance andefficiency enhancement for standard DC drives. Furthermore, the gas equivalents of these light recreational vehicles are often not subject to strict emissions regulation, so any enabling technology for light electric vehicles stands to make a significant impact on reducing carbon pollution. Though the essential elements are the same, further studies would be needed to determine the feasibility of such a system for full-size vehicles and vehicles with AC drives.
2. Series Battery/Ultracapacitor Configuration
A Comparison to Parallel Configurations
The common parallel configurations of battery and ultracapacitor banks are shown in Fig. 1. The parallel capacitance handles short-duration, high-current events, smoothing the demand on the battery. These configurations often require a capacitor bank with a voltage comparable to that of the battery bank. In some cases, the capacitor voltage operates in a rangebetween the battery voltage and some maximum charge voltage, supplying current to the traction motor or other load when its voltage is higher than that of the battery. A low-current charging circuit may allow energy transfer between the battery and ultracapacitor, or they may be isolated by a diode [3]. In either case, the capacitor bank needs to be pre-charged to a minimum operating voltage. In
more advanced implementations, DC/DC converters manage multi-directional power transfer between the battery, ultracapacitor, and traction motor, as in Fig. 1b. The ultracapacitor operating voltage is less constrained in these implementations, but it is still likely to be in the range of the battery voltage to improve conversion efficiency. Two DC/DC converters, typically MOSFET or IGBT boost/buck modules, can be independently controlled by energy and powermanagement algorithms to optimize system performance [4].
Figure 1: Two possible configurations in which the battery and ultracapacitor banks act in parallel, using a single DC/DC converter and a low-current charge controller (a) or a set of two DC/DC converters (b). For AC drives, an inverter would be present between the DC bus and the traction motor.
The series configuration places a low-voltage ultracapacitor module in series with the battery and primary DC/DC converter, as shown in Fig. 2. In this configuration, the ultracapacitor still serves to reduce periods of high current demand on the battery. During braking, the DC/DC controller disconnects the battery and only the ultracapacitor is used to recapture energy. Acceleration can be serviced by the batteries alone or the batteries and ultracapacitor together. Power sharing is accomplished by a summation of voltages, rather than a summation of currents as in the parallel configurations. In this "boost" mode, the controller supplies only as much voltage from the batteries as is needed to supplement the ultracapacitor voltage to achieve a desired current through the load. The current demand from the batteries is proportionally reduced by

virtue of power conservation in the DC/DC conversion.
The series configuration has several advantages, particularly in the context of our project. It is a simpler circuit to build and to explain; the ultracapacitor voltage adds directly to the voltage output of the primary DC/DC converter. This converter could potentially be an off-the-shelf two-quadrant DC motor controller, and no additional large inductors are needed to smooth the current:since all elements are in series, all current passes through the motor inductance. At its input, the DC/DC converter sees the fixed battery voltage instead of a fluctuating higher voltage as in some parallel configurations. Additionally, the ultracapacitor bank can have both a lower voltage and a lower total energy capacity, since its entire voltage range (down to zero volts) can be used during the transient braking and acceleration periods. This reduces the cost and size of the ultracapacitor bank, as well as the complexities of cell balancing. Acapacitor module with lower voltage and higher capacitance will have a lower effective series resistance (ESR), so it will dissipate less heat at high currents. The need for pre-charging is also eliminated.
Figure 2: The series configuration places the ultracapacitor after the initial DC/DC conversion stage so that its voltage adds to that of the DC/DC output. A switch and power diode allow for bypassing the ultracapacitor bank.
There are, however, some disadvantages of the series configuration. Most notably, power cannot be transferred between the battery and the ultracapacitor, as it can in many of the parallel implementations. This prohibits trickle charging of the battery from regenerated energy; the recovered energy can only be used again by the motor. The ability to modulate braking current requires one additional control stage, which could be a second DC/DC converter between the capacitor and the motor(instead of the switch/diode bypass), or an inverter/rectifier for an AC drive system. In
our case, we use the low-current field windings of a separately-excited DC motor as a simple way to achieve this control input.
The benefits of the series configuration certainly outweigh the disadvantages in our application. The key function of the ultracapacitor as a buffer for high current demands, particularly during braking, is preserved, though the ability to completelymanage power transfer paths is sacrificed. The simplicity, low cost, and ease of implementation of this configuration make it viable for light vehicles with significant cost constraints, for which regenerative braking may otherwise be out of reach. As an educational demonstration, it is also an intuitive and easy to model system.
B Modeling Series Power Transfer
During acceleration, the series-configured system transfers power from both the battery and the ultracapacitor to the motor. A simple model of the system is shown in Fig 3.
Figure 3: A model of the series-configured drive system during acceleration.
This model assumes an ideal battery, ultracapacitor, and DC/DC converter, so it is only valid for a first-order approximation. In order to validate the design for our experimental vehicle, we ran a more thorough simulation including internal resistances of the elements and switching dissipation in the DC/DC converter. However, the important dynamics of power sharing during acceleration are captured by the model in Fig. 3 and the resulting power conservation equations.
The system takes as its input a command for armature current, Ia, and the power sharing is established by the following:
aaacapbattmotor RIPPP 2 , (1)
cacap VIP (2)
caaaabatt VIRIP 2 , (3)

where Pmotor, Pbatt, and Pcap are the mechanical, battery, and, capacitor powers, respectively, Ra
is the armature resistance, Vc is the capacitor voltage, ω is the motor speed, and τa is the acceleration torque. As shown by Eq. 3, energy stored on the ultracapacitor reduces the power demand on the battery. The fraction of the totalelectrical power that is delivered by the battery is given by:
,112
a
c
aaa
ca
capbatt
batt
V
V
RI
VI
PP
P
(4)
where Va is the total voltage across the motor terminals. When the capacitor voltage is greater than Va, no power is needed from the batteries. Otherwise, the ratio depends on both the speed and acceleration of the vehicle. In all cases, stored voltage on the ultracapacitor reduces the power fraction supplied by the batteries, as shown in Fig 4. Additionally, the stored voltage extends the maximum speed of the vehicle once the acceleration load is met.
Figure 4: A simulation of acceleration in a series-configured system resembling our experimental vehicle (36V battery and 110F ultracapacitor at 300A load) shows the high initial power contribution from the ultracapacitor, which decreases as the vehicle speeds up and the capacitor discharges.
During regenerative braking, the DC/DC converter is used to effectively short-circuit its output, connecting the motor directly to the ultracapacitor as shown in Fig. 5. The batteries are thus excluded from the circuit during braking and only the ultracapacitor, which has a much higher charge rate, is used to accept large regenerative currents from the motor.
Figure 5: During regenerative braking, only the ultracapacitor is used to accept regenerated current from the motor.
In this simple model, the only dissipative element is the armature resistance of the DC motor. (The resistance of the ultracapacitor module is assumed to be much smaller.) The power transfer from kinetic energy into the ultracapacitor is easily predicted by:
crarbcap VIRIP 2 , (5)
where τb is the braking torque, ω is the motor speed, Ir is the regenerative braking current, and Ra is the motor armature resistance. In our case, braking current is modulated by controlling the field coils of a separately-excited DC motor, which effectively variesback-EMF through Kt, the motor torque constant. In this configuration, regenerative braking can only be achieved when the back-EMF generated by the motor is larger than the capacitor voltage, so a saturation point exists when the field current is maximized. Further electrically-controlled braking can be achieved by reversing the field and driving forward current through the armature, but this would not be regenerative.
3. Experimental Vehicle
Our program was centered on the development of an experimental vehicle, even before we had chosen a specific energy storage configuration. We chose to convert a gas go-kart to electric; a full-scale vehicle was not feasible given the cost and time constraints, but a smaller remote-controlled vehicle would not be as appealing a demonstration and the physics involved in kinetic energy recovery might not scale to such a system. The key requirements of the experimental vehicle were

focused on two main objectives: experimental capability and educational appeal. Reliable wireless data acquisition is an important factor to both of these requirements [7]. The finished vehicle is shown in Fig. 6.
Figure 6: The experimental vehicle, a converted racing go-kart. The capacitor, motor, and DC/DC converter are mounted to a shelf above the rear axle (insert).
A System Overview and Vehicle Layout
We chose to use an existing racing go-kart chassis rather than construct one from scratch. To the existing frame, we added a shelf on which the motor, ultracapacitor module, and power electronics are mounted. A tray that runs across the center of the vehicle holds three sealed deep-cycle lead-acid batteries. To counteract the heavy motor, the batteries were arranged to be as far forward as possible, with two on the left-hand side, as shown in Figure 7. Table 1 lists the key components and specifications of the experimental vehicle.
Figure 7: The kart layout from above shows the placement of batteries and the ultracapacitor module. The battery placement was chosen to keep weight distribution as even as possible.
Table 1: Experimental Vehicle Components and SpecificationsBatteries 12V, 79Ah sealed AGM Pb-Acid
from SeaVolt, 24kg ea, ~5mΩ ea.Ultra-capacitor
Maxwell 16V (6-cell), 110F with active balancing, 3kg, ~3mΩ
Motor D&D SepEx brushed DC, 10kW peak, 23kg
Mass (no driver): 160kgPeak Current: 300APeak Acceleration: 0.6gTop Speed: 16m/s (58km/hr)
B Separately-Excited Motor
In a separately excited motor, the armature and field windings are wired independently of each other, instead of together in series. The windings are driven separately by independent motor controllers. Field currents are roughly ten times smaller than armature currents, so the field controller is much smaller. Individual control is advantageous because the torque and speed range can be varied. This can be more efficient than a fixed torque curve as in a permanent-magnet motor. Initially, a high field current creates greater starting torque. Then, when acceleration is less critical, the field can be reduced to improve top speed.
The ability to vary the field windings can be used to simulate gear ratios. By discreetly altering the voltage of the field, the speedrange and available torque change as in a manual transmission, an enjoyable feature for a go-kart. A lever on our go-kart triggers a limit switch that alters the voltage being sent to the field windings and changes between first and second “gears.” A continuously variable transmission can also be simulated by varying the voltage in the armature and field windings. The power delivery is perfectly smooth because the change is more gradual.
During braking, when power is not being delivered, the mechanical energy can beconverted into electric potential energy, using the field to control the back EMF generated by the motor and push current back onto the ultracapacitor. The ability to charge a nearly-empty capacitor exists since the field current can be set as low as necessary. The field canalso be reversed, adding a reverse gear without the need for high-current contactors.
C Power Electronics
The DC/DC converter used on our experimental vehicle is a half-bridge

synchronous buck converter that uses MOSFET as switches. Figure 8 shows the circuit schematic. The MOSFETs used are from International Rectifier (IRFB3207). Four in parallel create a leg of the half-bridge, giving an on-resistance of approximately 1mΩ. The low resistance and switching dissipation of these MOSFETs make the half-bridge highly efficient; heat sinks are necessary since heat dissipation is still on the order of 100W.
One high-current contactor is used as a primary battery connection switch. There is also a manual kill switch for emergencies and 400A fuses at the batteries and ultracapacitor.A 10,000μF input capacitor holds the voltage across the half-bridge stable against inductive voltage spikes from the battery cabling inductance.
A second contactor serves to engage both acceleration assist and regenerative braking. When this contactor is closed, the current path is through the ultracapacitor. When the contactor is open, a power diode allows current to bypass the ultracapacitor in one direction (acceleration). This diode also protects against reverse polarization of the ultracapacitor if the contactor is left closed for too long during acceleration. A second half-bridge could replace the contactor/diode configuration to improve efficiency and allow some regenerative braking even when the motor back-EMF falls below the capacitor voltage.
Figure 8: The electrical schematic of our experimental vehicle.
D Signal Electronics
A set of two embedded microprocessor modules control our vehicle. These low-cost modules, designed for wireless data acquisition and control systems [8], each have a Texas Instruments 16-bit microprocessor and embedded ZigBee radio. One module handles inputs from pedal potentiometers, the shift
lever, and a “boost” button on the steering wheel. It relays data wirelessly to the second module, with failsafes to default to a coast state if data connection is lost. This method proved more reliable than a wired connection, since the controller grounds remain isolated.
The rear controller handles inputs from the current and voltage sensors, as well as the tachometer. It outputs a pulse width modulated (PWM) command signal for the armature controller, and a separate PWM signal for the field controller. These signals go into optically-isolated MOSFET gate drivers with passive shoot-through protection to prevent a direct short circuit through the half bridge.
The rear controller radio also transmits data at approximately 20Hz. This data is picked up by a radio connected to a laptop within range (several hundred meters), where it is time-stamped and logged for later analysis. Figure 9 shows an overview of the signal flow.
Figure 9: The path of wired and wireless signals on our vehicle. Commands from the driver are interpreted by the front controller and sent to the rear controller, which controls the motor and relays data to a laptop.
E Control Methods
Table 2 lists the control states of our experimental vehicle, and how the power electronics are configured to achieve each.Figure 10 shows the mapping of inputs to these states. In these mappings, “PWM” indicates current-controlled switching based onreference commands from the pedals. For example, during a full acceleration command in first gear, the high-side MOSFET would be PWMed at whatever duty cycle is necessary to achieve 300A armature current, or, if this is not possible, left at 100% duty cycle. As the vehicle increases speed, the duty cycle and

subsequent armature voltage would increase automatically. During braking, a similar feedback method is used to regulate the regenerative current by controlling the field voltage. In reverse, the field voltages are simply reversed. In the acceleration states, the low-side MOSFET is left off to act as a flyback didoe, though it can also be switched with a complementary PWM signal to achieve more efficient synchronous rectification.
Table 2: Experimental vehicle state descriptions.State MOSFET
Hi/LoCapacitorContactor
Field
Coast Off/Off Open Off1st Gear PWM/Off Open 36V1st Gear Boost
PWM/Off Closed 36V
2nd Gear PWM/Off Open 6V2nd Gear
BoostPWM/Off Closed 6V
Brake Off/On Closed PWM
Figure 10: Our vehicle’s state transition decision tree. Except in the event of a critical failure (e.g. overcurrent), the program immediately returns to the start of the decision tree after a state is chosen.This loop runs as fast as possible, asynchronously with the 20Hz radio routines.
4. Results
With our experimental vehicle, we have been able to collect data from both test drives and flywheel load testing. These results have verified the functionality of key components,
helped troubleshoot problems, and provided a check for the system model.
A Test Drives
A major goal of the project was to create a fun, drivable test vehicle that could still be used for data acquisition. The driver, free from the constraints of exact experimental procedure, should focus on the qualitative experience while the data acquisition system provides numeric results. Since the data system is custom-designed, the first important task was to verify its operation during test drives. Fig. 11 shows a data profile from the first test of ultracapacitor power assist. Data latency measurements show that even during hard switching of the capacitor contactor with a 270A load, only one data packet is lost. Radio range was confirmed to be at least 100m. In this data clip, the ultracapacitor boost was engaged late in the acceleration; its effect on reducing battery current at this point is minimal, though still observable. As the acceleration finishes and the controller leavesthe current-controlled region (41.5s), the capacitor voltage extends the vehicle’s top speed by about 23%.
Figure 11: Data collected during a test-drive demonstrates the effect of a 12V ultracapacitor “boost.” 2,350rpm is the nominal top speed with batteries alone and a 12V field. With the ultracapacitor engaged, the top speed is improved to 2,900rpm.
A persistent hardware failure mode prevented us from testing regenerative braking

during the test drives. However, we were able to capture data during one failure that allowed us to trace the problem back to a simple software bug. Fig. 12 shows the data profile leading up to this failure. During testing of the “two-speed manual” field-weakening mode, a 750A current spike was recorded when the driver let off the brake while the accelerator was still held down. In this particular state, the software should enforce the current limit, but instead jumped to the previous value of the DC/DC PWM command, which happened to be 100%. This simple diagnosis proved thevalue of reliable data collection for an experimental vehicle, and the fix was implemented for future testing.
Figure 12: Test-drive data showing the effect of field weakening in two-speed manual operation to create a second period of acceleration. At 66.3s, a software bug caused an errant 100% motorcommand and a large current spike.
B Flywheel Testing
For more controlled bench testing, we coupled the motor directly to a flywheel load sized to simulate the mass of a 250kg fully-loaded kart. The flywheel creates a near-ideal inertial load for testing, minimizing the effect of modeling uncertainties such as driver mass and rolling friction. These tests areapproximations for periods of acceleration and braking, where the inertial load dominates, but would not be representative of cruise conditions where friction and drag dominate.
One goal of flywheel testing was to validate the simple models developed for the system. For regenerative braking, the model proposed (Fig. 5) consists of very few elements, making it easy to use parameter estimation from recorded data to validate the model. If the recorded current and voltage profiles can predict the values of capacitance and resistance both precisely and accurately, then the model is supported. In each test run, the flywheel was taken up to speed, and then the brake pedal was used to impose varying braking currents. Fig. 13 shows a representative flywheel regenerative braking profile, and Table 3shows the results of the parameter estimation method, based on numeric integration of Eq. 5,over seven braking periods.
Figure 13: A data sample showing regenerative braking to charge the ultracapacitor. The motor field is used to feedback-control the armature current, which charges the ultracapacitor.
Table 3: Parameter estimation from flywheel regenerative braking data over seven trials. The capacitance prediction is stronger than the armature resistance prediction.Flywheel Moment of Inertia: 0.382kg∙m2
Equivalent Vehicle Mass: 252kgParameter [Unit]
Estimate Mean[Range]
Nominal
C [F] 112.4[106.3 - 124.6]
110
Ra [mΩ] 49.1[44.6 - 61.4]
50

To characterize regenerative braking efficiency, we consider the total energy gained by the capacitor, less the energy used to generate the motor field (found by numeric integration of the field current). This is compared to the total energy lost by the flywheel. In our initial testing, this measure of energy recovery ranged from 5-35%. Generally, braking from higher speeds and braking into a partially-charged capacitor improved efficiency. From relatively low speeds, the capacitor can be charged over two or more braking cycles. When averaged over two low-speed braking cycles, the energy recoveries ranged from 17-25%.
Notably, the energy lost to generating the field is a significant portion of the total resistive dissipation (11-35% in our initialtesting), despite the relatively low field current. This observation, and the current profiles (such as in Fig. 13), suggest that an algorithm which accounts for the diminishing returns as field current saturates toward the end of a braking cycle would further improve efficiency. A simple soft-limit of the field current during braking can also achieve improvements: Later trials under similar conditions, but with a 20A field current limit, yielded energy recoveries of 28-43%, with the average over two low-speed braking cycles improving to 35-39%. In these trials, field dissipation accounted for only 3-21% of the total resistive dissipation.
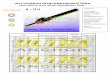
Under ultracapacitor-assisted acceleration, the system is slightly more complex. However, the power conservation-based model offers a good starting framework for data analysis. Fig.14 shows a typical acceleration profile where the ultracapacitor, initially charged to 12V, is engaged immediately (as opposed to later, as in Fig. 11, for a speed boost). Initially, the power contributed by the ultracapacitor reduces the power demand on the battery. Then, after the current-limited acceleration period finishes, the left-over capacitor voltage improves the top speed of the vehicle. The four power elements of Eq. 1 are tracked. The power conservation model is supported by the relatively low amount of unaccounted-for power in the system at all times. Over three trials, the ratio of RMS unaccounted-for to RMS accounted-for power ranged from 11-13%.
Figure 14: A typical boost profile in which the ultracapacitor is engaged at the start of acceleration while the accelerator is held at full command. The results indicate that the essential power elements are accounted for in the model proposed.
There is an inherent tradeoff between the performance and efficiency benefits of the series-configured system. Table 4 examines three scenarios, averaged over three trials each, to show this tradeoff with a 12V ultracapacitor boost. Scenario 1 represents a maximum acceleration load with no boost. Using the ultracapacitor boost, a speed and power improvement can be achieved while still reducing battery energy used (Scenario 2). Amore substantial reduction in battery energy consumption can be achieved by sacrificing the extra speed, while keeping the extra power (Scenario 3). An even more dramatic reduction in battery energy use could be achieved by targeting the same top speed and power as without boost (untested). An algorithm that could optimize energy and performance priorities to coordinate the engagement of the ultracapacitor and the main DC/DC converter would be a target for future work. For now, it is left to the driver’s judgment.
Table 4: Three scenarios demonstrating the power, speed, and energy tradeoffs of a capacitor boost.Scenario: 1 2 3Top Speed [RPM] 1814 2150 1814Peak Motor Power [kW]
5.6 7.2 7.2
Peak Battery Power [kW]
8.2 8.3 8.3
Peak Capacitor Power [kW]
NA 3.1 3.1
Battery Energy Used [kJ]
11.4 11.3 8.7

5. Conclusion
This paper demonstrates the potential advantages, first-order model, and successful implementation of a series battery/ultracapacitor drive system for alightweight electric vehicle. The system provides many of the benefits inherent in theparallel configuration but with a significantly reduced cost for small vehicles, along with a simpler control scheme more well-suited for educational demonstration.
Our results with a separately-excited DC traction motor-powered go-kart confirmed effective regenerative energy recovery into the capacitor only, demonstrated reduced load on batteries during acceleration, and showedsignificantly increased top speeds after the acceleration period. Further research and prototyping should be done to determine the scalability of this system to larger electric vehicles, including those with AC motor systems, along with cost comparisons forcomponent prices at that scale.
Acknowledgements
This project is supported by the Peter J. Eloranta Summer Undergraduate Research Fellowship and the Edgerton Center at MIT. The author would like to thank the Edgerton Center staff, as well as Professors Alexander Slocum, Jeffrey Lang, and Hongshen Ma, and Matt Robertson for their help and guidance.
The project would not have been possible without the inspiration and enthusiasm of the Summer Engineering Workshop team: Ethan Aaron, Costas Akrivoulis, Ronny Contreras,Max Hill, Kevin Krakauer, David McCarthy,Mike Paresky, Edwin Perez-Clancy, Anil Singhal, and Cameron Tenny.
References
[1] F. Gagliardi, M. Pagano, “Experimental results of on-board battery-ultracapacitor system for electric vehicle applications,” in Proc. International Symposium on Industrial Electronics, IEEE, Vol. 1, pp. 93-98, L'Aquila, Italy, 2002.
[2] R.M. Sclupbach et. al., “Design methodology of a combined battery-ultracapacitor energy storage unit for
vehicle power management,” in Proc. Power Electronics Specialist Conference, IEEE, Vol. 1, pp. 88-93, Acapulco, Mexico, 2003.
[3] A.W. Stienecker, M.A. Flute, and T.A. Stuart, “Improved Battery Charging in an Ultracapacitor–Lead Acid Battery Hybrid Energy Storage System for Mild Hybrid Electric Vehicles,” in Proc. SAE World Congress, Detroit, Michigan, USA, 2006.
[4] P.C.K. Luk and L.C. Rosario, “Power and Energy Management of a Dual- Energy Source Electric Vehicle – PolicyImplementation Issues,” in Proc.International Power Electronics and Motion Control Conference, IEEE, pp. 1-6, Shanghai, China, 2006.
[5] “Electric Green Racing,” University of Manchseter, online final project video: http://www.eee.manchester.ac.uk/undergraduate/courses/specialfeatures/fourthyearproject/Electric_Green_Racing_medium.wmv, 2007.
[6] J.W. Dixon and M.E. Ortuzar, “Ultracapacitors + DC-DC converters in regenerative braking system,” IEEE Aerospace and Electronic Systems Magazine, Vol. 17, No. 8, pp. 16-21, 2002.
[7] T. Lequeu et. al., “Two Examples of Pedagogical Applications of Electrical Go-Karts,” in Proc. European Conference on Power Electronics and Applications, IEEE, pp. 1-9, Aalborg, Denmakr, 2007.
[8] S. Colton, “Exportable Development of the 2.007 Control System,” S.B. thesis, Massachusetts Institute of Technology, 2008.