Embed Size (px)
Citation preview

770 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997
Two Strategies in the Problem ofChange Detection and Isolation
Igor V. Nikiforov
Abstract—The comparison between optimal sequential and nonse-quential (fixed-size sample (FSS)) strategies in the problem of abruptchange detection and isolation is discussed. In particular, we show thatsometimes a simple FSS algorithm is almost as efficient as an optimalsequential algorithm which leads to a burdensome number of arithmeticaloperations.
Index Terms—Quickest change detection, quickest change diagnosis,sequential and fixed-size sample strategies.
I. INTRODUCTION
The history of comparisons between sequential and nonsequential,namely, FSS strategies in the theory of statistical hypotheses testingand signal detection is quite long, some results and references can befound in [16], [3], [4], [1]. The first comparison between optimalsequential and FSS strategies in quickest change detection wasperformed by Shiryaev in [13]–[15] for the Bayesian approach. Thegoal of the present correspondence is to compare optimal sequentialand FSS strategies for the non-Bayesian approach by using Lorden’s“worst case” criterion and toextendthis comparison to the changediagnosis (detection and isolation) problem which is treated as ageneralization of the quickest detection problem to the case ofmultiple (K > 2) hypotheses.
This correspondence treats two problems. The first is to comparethe above strategies in the case of the quickest change detectionproblem (K = 2). The main results of this part are established inTheorem 1 and Corollary 1. Next, we compare the above strategiesin the case of the quickest change detection and isolation problem(K > 2). The main results of this part are represented by Theorem2 and Corollary 2.
II. CHANGE DETECTION PROBLEM
A. The Criterion of Comparison
Let (Yt)t�1 be an independent random sequence with a probabilitydensityp�(Yt), where� is a parameter of interest. Until the unknownchange timet0, the parameter� is � = �0 and from t0 becomes� = �1. The change detection algorithm has to compute a stoppingtime (alarm time)N based on the observationsY1; Y2; � � �. We requirethat the “worst case” mean detection delay [6]
���
= supt �1
esssupE� N � t0 + 1 j N � t0; Yt �11 (1)
should be as small as possible for a given mean time before a falsealarm
�T = E� (N): (2)
Manuscript received June 16, 1995; revised May 27, 1996. The material inthis correspondence was presented in part at the American Control Conference1995, Seattle, WA, June 21–22, 1995.
The author is with D´epartement Genie des Syst`emes d’Information et deDecision, Laboratoire de Modelization et Surete des Systemes, Universite deTechnologie de Troyes, LM2S, BP 2060–10010, Troyes C´edex, France.
Publisher Item Identifier S 0018-9448(97)00792-X.
B. Model
Let (yt)t�1 be the following independent Gaussian random se-quence:
L(yt) =N (�0; �
2); if t < t0N (�1; �
2); if t � t0(3)
wherey 2 RRR; � 2 RRR; �0; �1, and�2 are knowna priori.The optimal sequential strategyis given by the cumulative sum
(CUSUM) algorithm stopping timeN1 [10]
N1 = inf t � 1 : max1�k�t
St
k� �1
St
k=
t
i=k
lnp� (yi)
p� (yi);
p�(y) =1
�p2�
exp(y � �)2
2�2(4)
where�1 is a chosen threshold. Lorden [6] gave an asymptotic lowerbound for the “worst case” mean detection delay and proved that theCUSUM algorithm reaches this bound
N1: ��� � ln �T
�10; as �T !1
where
�10 = E� lnp� (Yt)
p� (Yt)=
(�1 � �0)2
2�2
is the Kullback–Leibler information. Nonasymptotic aspects of opti-mality for the CUSUM algorithm were investigated by Moustakidesin [7].
The optimal FSS strategyis based on the following rule: sampleswith fixed sizem are taken, and at the end of each sample a decisionfunction is computed to test between the hypothesesH0: � = �0and H1: � = �1. Sampling is stopped after the first samplen ofobservations for which the decisiondn is taken in favor ofH1. Thesolution to the optimal hypotheses testing problem is given by thefundamental Neyman–Pearson lemma. Therefore, the stopping time�N1 of the repeated Neyman–Pearson testis
�N1 = infn�1
fnm : dn = 1g (5)
where the decision ruledn of the Neyman–Pearson test is defined by
dn =1; if Snm(n�1)m+1 � h
0; if Snm(n�1)m+1 < h(6)
h is a chosen threshold, and the log-likelihood ratio (LR)Snm(n�1)m+1
corresponding to thenth sample is defined in (4).Let us compute the minimum “worst case” mean detection delay for
the repeated Neyman–Pearson test (5), (6). The result is establishedin the following Theorem 1.
Theorem 1: Let us consider model (3). Let�N1 be the FSS changedetection algorithm (5), (6). Then the minimum “worst case” meandetection delay��� for the optimal FSS algorithm is given by thefollowing asymptotic relation:
��� � 2
ln �T
�10; as �T !1: (7)
Proof of Theorem 1:See Appendix I.
0018–9448/97$10.00 1997 IEEE

IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997 771
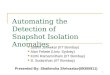
Fig. 1. Comparison between the sequential and FSS algorithms; sequentialalgorithm: asymptotic formula (dashed lines); FSS algorithm: asymp-totic formula (dash–dot lines), and “exact” curves (solid lines) whenK = 2; 5; 10; 20;50.
Corollary 1: Let us consider model (3) and compare the optimalsequential and FSS detection procedures. Asymptotically, as�T goesto infinity, the properties of these procedures are given by thefollowing relations:
��� �
ln �T
�; for the CUSUM algorithm
2 ln�T
�; for the Neyman–Pearson algorithm
as �T !1:
The results of the comparison are presented in Fig. 1 when
�1 � �0
�= 1:
We also show here the results of the exact (nonasymptotic!) opti-mization of the Neyman–Pearson algorithm (see “exact” FSS curvewhenK = 2). The details of this optimization are given in SectionIII-C. This figure shows the following: i) the difference betweenasymptotic formula (7) and the “exact” value of the “worst case”mean detection delay for the FSS change detection algorithm (5), (6)is negligible when�T � 106; ii) the sequential strategy is better thanthe nonsequential one when�T � 2 � 102.
C. Discussion
Let us add three comments on the above results.First, note that the “worst case” criterion, which is slightly different
from (1) and (2), is used in [12] to estimate the optimal parametersof the FSS algorithm. But the analytical formulas for the minimaxmean detection delay and the tuning parameters(m;h; �; �), where� and� are the probabilities of false alarm and miss detection of theNeyman–Pearson test, were not given in [12].
Second, it is well known that the probabilities� and �, bythemselves are not reasonable performance indices in the case of thequickest change detection. From Theorem 1 it follows that the optimalvalues of these probabilities are given by the following asymptoticformulas (see details in Appendix I):
�� � 1p2� �T
p2 ln �T
�� � 1p2� ln �T �ln ln �T
as �T !1:
On the other hand, the optimal choice of the tuning parametersh;m is
h� � ln �T
m� � ln �T
�
as �T !1: (8)
Finally, let us consider the case where the parameter�1 is unknown.For simplicity, we assume�1 > �0. It is well known that in the caseof a real parametric family of densitiesp�(y) with a monotoneLR,there exists a uniformly most powerful (UMP) statistical test for thiscomposite hypotheses testing problem [5]. Roughly speaking, if theprobability � is fixed then the same FSS algorithm is the best foreach�1 > �0. Unfortunately, this result cannot be extended easilyto the on-line change detection problem. It follows from (8) that theoptimal valuem� of a sample size is a function of�1.
III. CHANGE DIAGNOSIS PROBLEM
Let (Yt)t�1 be an independent random sequence with a probabilitydensityp�(Yt). Until t0 the parameter is� = �0, and fromt0 becomes�l; l = 1; � � � ; K�1. The change timet0 and numberl are unknown.The change diagnosis algorithm has to compute a pair(N; �) basedon the observationsY1; Y2; � � � ; whereN is a stopping time and� isa final decision. LetP l
t be the distribution of observationsY1; Y2; � � �when t0 = 1; 2; � � � and letEl
t be the expectation underP lt . Note
here thatP l1 = Pl andP 0
1 = P0. We use the following criterion ofcomparison [8], [9].
A. The Criterion of Comparison
We require that the “worst case’’ mean detection/isolation delay
���= sup
t �1;1�l�K�1esssupE
lt N � t0 + 1 jN � t0; Y
t �11 (9)
should beas small as possiblefor a given minimum�T of the meantime before a false alarm or a false isolation
min0�i�K�1
min1�j 6=i�K�1
Ei infr�1
fNr : �r = jg = �T (10)
whereE0( ) = El1( ); El( ) = El
1( ); and(Nr; �r) are the alarmtime and final decision of the detection/isolation algorithm which isapplied toYN +1; YN +2; � � � ; when
Y1; Y2; � � � ; YN +1; YN +2; � � � � Pi
and
infr�1
fNr : �r = jg
is the first alarm timeNr with the final decisionj in the followingsequence of alarm times:
N0 = 0 < N1 < N2 < � � � < Nr < � � � :
B. Model
Let (Yt)t�1 be an independent Gaussian random sequence ob-served sequentially
L(Yt) =N (�0; �
2IK�1); if t < t0
N (�l; �2IK�1); if t � t0
(11)
where Yt 2 RRRK�1; � 2 RRRK�1; K � 3; �T0 = (0; � � � ; 0);�Tl = (0; � � � ; 0; �; 0; � � � ; 0); � > 0; and�2 are known constants andIK�1 is the identity matrix of orderK � 1. The change timet0 andnumberl are unknown. In other words, we haveK � 1 independentchannels and the “target”� can appear at the unknown momentt0
and in the unknown channell.The optimal sequential strategyis given by the following rule [8],
[9]:
~N = minf ~N1; � � � ; ~NK�1g (12)
~� = argmin f ~N1; � � � ; ~NK�1g (13)
~Nl= inf
k�1~Nl(k) (14)

772 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997
~Nl(k) = inf t � k: min
0�j 6=l�K�1Stk(l; j)� � � 0 (15)
where
Stk(l; 0) =
t
i=k
lnp�(yli)
p0(yli)=
�
�2
t
i=k
yli ��2(t� k + 1)
2�2
Stk(l; j) = S
tk(l; 0)� S
tk(j; 0)
� is a chosen threshold, andyli is the lth element of the vectorYi.The statistical properties and optimality of algorithm (12)–(14) areinvestigated in [8], [9]. The asymptotically optimal relation between��� and �T (a lower bound in a class of detection/isolation algorithms)is given by the following formula (see [8]):
( ~N; ~�) : ��� � ln �T
��; as �T !1 (16)
where
��= min
1�l�K�1min
0�j 6=l�K�1�lj
and
�lj = El lnp� (Yt)
p� (Yt)
is the Kullback–Leibler information between the hypothesesHl: � =
�l andHj : � = �j . It follows immediately from the definition ofmodel (11) that
��=
�2
2�2:
The optimal FSS strategyis based on the following rule: sampleswith fixed size m are taken, and at the end of each sample, adecision function is computed to test between the hypothesesH0: � =
�0;H1: � = �1; � � � ;HK�1: � = �K�1. Sampling is stopped after thefirst sample of observations for which the decision�� is taken in favorof H�� : �� > 0. The solution to the optimal FSS multiple hypothesestesting problem for a Gaussian model with independent channels isknown. This is so-calledK-slippage problem[2; Sec. 6.3]. Considera sampleY1; � � � ; Ym of independent identically distributed (i.i.d.)observations:
L(Yi) = N (�l; �2IK�1); l = 0; 1; � � � ; K � 1:
The decision function�� of the optimal FSS algorithm is given by
��(Y1; � � � ; Ym) =0; if Sm1 < h
d; if Sm1 � h(17)
d(Y1; � � � ; Ym) = arg max1�l�K�1
Sm1 (l; 0) (18)
where
Sm1 = max
1�l�K�1Sm1 (l; 0):
Therefore, after elementary calculations we get the decision rule( �N; ��) of the FSS change detection/isolation algorithm
�N = infn�1
nm : Snm(n�1)m+1 � h (19)
�� = d(Y �N�m+1; � � � ; Y �N): (20)
The following are the tuning parameters of this algorithm: the samplesize m and the thresholdh. Let us now compute the statisticalperformance indices of this algorithm by using criterion (9) and (10).
Theorem 2: Let us consider model (11). Let( �N; ��) be the FSSchange detection/isolation algorithm (19), (20). Then the “worst case”mean detection/isolation delay is given by
���=
�2(x� y)2
�2 1� [1� �(y)][1 � �(x)]K�2+
�2(x� y)2
�2� 1
(21)
where
x =h+m�p
2m�
y =h�m�p
2m�
�(z) =1p2�
1
z
e�
dx m� = m�2
2�2:
The mean time before a false alarm is given by
�Tfa =�2(x� y)2(K � 1)
�2f1� [1� �(x)]K�1g (22)
bounds for the mean time before a false isolation are given by
�Tfa � �T� ��2(x� y)2
�2�(x)[1� �(y)][1� �(x)]K�3(23)
and bounds for the probability of false isolation are given by
�(x)[1� �(y)][1� �(x)]K�3
1� [1� �(y)][1� �(x)]K�2
� �� �1� [1� �(x)]K�1
(K � 1)f1� [1� �(y)][1� �(x)]K�2g : (24)
Proof of Theorem 2:See Appendix II.In Section II of this correspondence we discussed the optimal FSS
algorithm whenK = 2. It was shown that
���K=2 � 2
ln �T
�(�); as �T !1
where�(�) = �
2�. Now, this result has the following generalization.
It follows immediately from (21)–(23) that
���K�2 �
�2(x� y)2
�2�(y)+
�2(x� y)2
�2� 1
�T � �2(x� y)2
�2�(x):
The right sides of the above inequalities are equivalent to the rightsides of the equations for��� and �T in the case ofK = 2 (see the proofof Theorem 1). Therefore, the “worst case” mean detection delay���K=2 plays the role of an upper bound for���K>2 and the followingresult is established in Corollary 2.
Corollary 2: Let us consider model (11) and compare the opti-mal sequential and FSS diagnosis (detection/isolation) procedures.Asymptotically, as�T goes to infinity, the properties of these proce-dures are given by the following relations:
���K>2
� ln �T
�(�); for the sequential algorithm
����K=2 � 2 ln �T
�(�); for the FSS algorithm
as �T !1:
(25)
C. Numerical Comparison
The results of the comparison are presented in Fig. 1 when thesignal-to-noise ratio (SNR) isb = �
�= 1 andK = 2; 5; 10; 20; 50.
For the optimal sequential algorithm we use (16) to compute theasymptotic relation between��� and �T . For the FSS algorithm we givehere the results of the exact (nonasymptotic!) optimization of the FSSalgorithm. The optimal choice of the parametersx = x(m;h) and

IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997 773
Fig. 2. Comparison between the sequential and FSS algorithms; sequentialalgorithm: asymptotic formula (solid lines), simulation (dash–dot lines); FSSalgorithm: “exact” curves (dashed lines), upper bounds (dotted lines).
y = y(m;h) of the FSS algorithm can be reduced to the followingoptimization problem:
(x�; y�) = argminx;y ��(x; y)
�T (x; y) = const(26)
where �T = minf �Tfa; �T�g. Hence, we fix �T0 = minf �Tfa; �T�g anddeduce the optimal valuesx� and y� by minimizing the function���(x; y) (see (21)) with respect tox and y under the constraint�Tfa(x; y) = �T0 (see (22)). The minimum of the “worst case” meandetection/isolation delay is given by���(x�; y�). The delay���(x�; y�)as a function of�T (x�; y�) is called the “exact” FSS curve (see Fig. 1).We also compute an asymptotic upper bound for��� by using (25).
The other results of the comparison when the SNR isb = �
�=
1; 3; 5 andK = 5 are presented in Fig. 2. For the optimal sequentialalgorithm, we use again the asymptotic equation (16). Because this“first-order” equation is not very accurate, we also estimate the “worstcase” mean detection/isolation delay��� for the optimal sequentialalgorithm by using the simulation of this algorithm. For each valueof the threshold� we have performed 1000 repetitions to estimatethe empirical mean of���. As we want to check superiority of thesequential algorithm, we use a lower bound for�T : �T � exp(�) (seedetails in [8]). Therefore, the simulated curves (see Fig. 2, dash–dotlines) play the role ofupper boundsfor the true functions��� = ���( �T )
of the sequential algorithm. These figures show the following: i) the“exact” curves���( �T ) of the optimal FSS algorithm are close to theasymptotic upper bound (25) when�T is large; ii) the “worst case”mean detection/isolation delay of the optimal FSS algorithm doesnot reach the lower bound (16) for���( �T ) in the class of sequentialchange detection/isolation algorithms. Therefore, exactly as in thecase ofK = 2, the optimal sequential change detection/isolationalgorithm is asymptotically twice as good as the FSS competitor.
D. Example—Radionavigation System Integrity Monitoring
Let us consider integrity monitoring of the global positioningsatellite set (GPS or GLONASS). Numerous heuristic fault detectionand isolation algorithms for the GPS integrity monitoring have beensuggested. As mentioned in [11] “the majority can be describedas ‘snapshot’ approaches because they use asingle setof GPSmeasurements collected simultaneously.” In our notations the “snap-shot” approach is the case of the FSS change detection/isolation
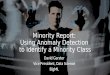
Fig. 3. Comparison between the sequential and “snapshot” algorithms; se-quential algorithm: asymptotic formula (solid lines), simulation (dash–dotlines); “snapshot” algorithm: “exact” curves (dashed lines).
algorithm (19), (20) whenm = 1. The results of the comparisonbetween the sequential and snapshot algorithms for the differentvaluesb = �
�= 1; 3; 5 of the SNR andK = 5 are given in Fig. 3.
For the optimal sequential algorithm, we use the asymptotic equation(16) and Monte Carlo simulation. For the snapshot algorithm wefix �T0 = minf �Tfa; �T�g and deduce the value ofh� by solving(22): �Tfa(x(h); y(h)) = �T0 under the condition thatm = 1.After this we compute���(x(h�); y(h�)) by using (21). The delay���(x(h�); y(h�)) as a function of �T (x(h�); y(h�)) is called the“exact” FSS curve (see Fig. 3). Fig. 3 shows that the “worst case”mean detection/isolation delay��� of the optimal sequential algorithmis significantly lower then the��� of the “snapshot” algorithm whenthe value of�T is great, especially, for small values of the SNRb.
Let us discuss a numerical example which is typical for the GPSintegrity monitoring. We assume that the sampling period is equalto 1 s; if b = 1 and �T = 10
7 � 1=3 year then the mean delay fordetection of the optimal sequential algorithm is equal to'32 s butthe mean delay for detection of the “snapshot” algorithm is equal to'20, 3 h! Nevertheless, in the case of a large SNR(b � 5) or whenthe value of �T is relatively small the optimal sequential and simple“snapshot” (with a much lower computational cost) algorithms havenearly the same efficiency. The explanation of these results is basedon the fact that the sequential algorithm (12)–(14) is optimal in thesense of criterion (9), (10)only asymptotically(i.e., when �T !1).
APPENDIX IPROOF OF THEOREM 1
Delay for Detection
Let us consider the “worst case” mean detection delay��� for FSSalgorithm (5), (6). We know thaty1; � � � ; yt �1 is a sequence of i.i.d.random variables. It follows from this fact that (1) can be rewritten as
���= sup
t �1
esssupE��N1 � t0+1 j �N1�t0; y
t �11
= max1�k�m
esssupE��N1�k�(n0�1)m+1 j y
(n �1)m+k�1
(n �1)m+1
wherek = t0� (n0� 1)m andn0 : (n0� 1)m+1 � t0 � n0m, kis the change point in then0th sample,n0 is the number of samplewhich contains the change in�. Because the right-hand side of the

774 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997
preceding equation isindependentof the number of samples, weassumen0 = 1 in order to simplify the notations.
First, let us assume thatk = 1. It is easy to see that
esssupE��N1 j y01 = E� (mn
�) (27)
wheren� is the number of subsequent samples (of sizem), beforethe first sample for which the decision isdn = 1. It is well knownthat n� has a geometric distribution
PPP � (n�= n) = �
n(1� �); n = 1; 2; � � �
where� is the probability of miss detection of the Neyman–Pearsontest. Therefore, the expectation ofn� is (1��)�1 and the expectationE� (mn�) can be written as
E� (mn�) =
m
1� �:
Second, let us assume that1 < k � m. In this case
esssupE��N1 � k + 1 j yk�11
= m� k + 1+m
1� �esssupPPP � dn = 0 j yk�11 :
The conditional probabilityPPP � (dn = 0 j yk�11 ) can be rewritten as
PPP � dn = 0 j yk�11 = PPP �
m
i=1
lnp� (yi)
p� (yi)< h j yk�11
and, finally, we get
PPP � dn = 0 j yk�11
= PPP �
�1 � �0
�2
k�1
i=1
yi +
m
i=k
yi �m�1 + �0
2< h j yk�11 :
From the above equation it follows that
max1<k�m
esssupE��N1 � k + 1 j yk�11
= max1<k�m
(m� k + 1) +m
1� �
= m� 1 +m
1� �: (28)
Therefore, it results from (27) and (28) that
���= m� 1 +
m
1� �: (29)
B. Mean Time Before a False Alarm
Let us consider the mean time before a false alarm�T for FSSalgorithm (5), (6). The number of samplesn� has a geometricdistribution
PPP � (n�= n) = (1� �)
n�; n = 1; 2; � � �
where� is the probability of false alarm of the Neyman–Pearson test,and the expectation�T = E� (N1) can be written as
�T =m
�: (30)
C. The Optimal FSS Algorithm
Let us now apply (29) and (30) to compute the optimal parametersof FSS algorithm (5), (6). It follows from the definition of a Gaussianlaw that
� = PPP � (d = 1) = PPP �
�1 � �0
�2
m
i=1
yi �m�1 + �0
2� h :
Denote byz a Gaussian random variable:z � N(0; 1). It is obviousthat
� = PPP z � h+m�p2m�
= �h+m�p2m�
where
m� = m�10 = m(�1 � �0)
2
2�2
and
�(x) =1p2�
1
x
e�
dx:
By the same arguments we can write
� = PPP z <h�m�p2m�
= 1� �h�m�p2m�
:
As in [14], [15] let us introduce the following variables:
x =h+m�p2m�
and y =h�m�p2m�
:
Therefore,
���=
m
1� �+m� 1 =
(x� y)2
2�10�(y)+
(x� y)2
2�10� 1
�T =m
�=
(x� y)2
2�10�(x):
If �T is a given value then��� is a function of one of the parametersx; y. Let us compute the derivative of��� with respect tox
1�T
@���
@x=�'(x)�2(y)� '(x)�(y) + '(y) @y
@x�(x)
�2(y)
='(x)'(y)
�2(y)��2(y)
'(y)� �(y)
'(y)+
�(x)
'(x)+x� y
2
='(x)'(y)
�2(y)��2(y)
'(y)+ V (x)� V (y)
where
V (x) =1
2x+
�(x)
'(x)'(x) =
1p2�
e�
and
y = x� 2�10 �T�(x):
It will suffice to solve the equations
�� (y)
'(y)+ V (x)� V (y) = 0
y = x� 2�10 �T�(x):(31)
Let us denote byx�; y� the roots of these equations. As in [14],[15], the idea of the proof consists in showing the fact thatx�( �T )!1; y�( �T ) ! �1 as �T ! 1.
It results from the definition of the parametersx andy thatx > y.Hence, there are the following particular cases: i)y < x < 0; ii)x > y > 0; iii) x > 0 andy < 0. Let us show now thatonly caseiii) leads to the solution of (31) as�T ! 1.

IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997 775
First, let us note that in case i) the following inequality is true:
V (x) < V (y) +�2(y)
'(y):
This leads to
@���
@x< 0:
Second, it follows from the second equation in (31) that in caseii) the following asymptotic relation holds:x�( �T )!1 as �T !1.Moreover, from the properties of the functionV (x) and (31) we getthat in this casey�( �T ) ! 1. Under these assumptions (31) can berewritten in the following manner:
x� y � 2x�2'(x)
x� y = 2�10 �T�(x)as �T !1:
It is easy to check by simple computations that the above equationsdo not have any rootsas �T ! 1.
Next, let us consider case iii)(x > 0 and y < 0). From theproperties of the functionV (x) and (31) it is easy to see that inthis casex�( �T ) ! 1 and y�( �T ) ! �1 as �T ! 1. By thesame arguments as in the previous case, (31) can be expressed in thefollowing asymptotic form:
x� y � 4'�1(y)
x� y = 2�10 �T�(x)as �T !1:
From the above equations we get the asymptotic optimal solutions
x� � 2 ln �T
y� � � ln ln �T :
The substitution of the asymptotic optimal solutions in (31) results in
��� � 2
ln �T
�10as �T !1:
The proof of Theorem 1 is complete.
APPENDIX IIPROOF OF THEOREM 2
Note that the scheme of our proof is exactly the same as in thefirst part of Theorem 1.
A. Delay for Detection
Let us consider the “worst case” mean detection/isolation delay��� for the FSS change detection/isolation algorithm. The sequenceY1; � � � ; Yt �1 is i.i.d. It follows from this fact that (9) can berewritten in the following manner:
���l = sup
t �1
esssupElt
�N � t0 + 1 j �N � t0; Y1; . . . ; Yt �1
= max1�k�m
esssupElk
�N � k � (n0 � 1)m+ 1 j Y (n �1)m+k�1
(n �1)m+1
wherek = t0 � (n0 � 1)m andn0: (n0 � 1)m + 1 � t0 � n0m.Exactly as in Theorem 1, ifk = 1 then
esssupEl1
�N j Y 01 =
m
1� �
where� = PPP l(Sm1 < h) is the probability of missed detection for
the K-slippage problem. If1 < k � m then
max1<k�m
esssupEl1
�N � k + 1 j Y k�11
= max1<k�m
m� k + 1 +m
1� �esssupPPP
lk S
m1 < h j Y k�1
1 :
Therefore, from the facts thatesssupPPP lk(S
m1 < h j Y k�1
1 ) = 1
and that the value of� is the same for the different vectors�lwe get, finally, the following formula for the “worst case” meandetection/isolation delay:
���= m� 1 +
m
1� �: (32)
The probability� is given by the following equation:
� = PPP l max1�l�K�1
Sm1 (l; 0) < h
= PPP z <h�m�p
2m�
K�2
i=1
PPP z <h+m�p
2m�
= [1� �(y)][1� �(x)]K�2
wherez is a Gaussian random variable:L(z) = N (0; 1).
B. Mean Time Before a False Alarm
The mean time�Tfa before a false alarm of aj-type is given by thefollowing equation (see the proof of Theorem 1):
�Tfa = E0 infr�1
f �Nr: �r = jg =m
�j
where
�j = PPP 0[ Sm1 > h \ fd(Y1; � � � ; Ym) = j > 0g]
is the probability of aj-type’s false alarm for theK-slippage problem.Note that�j = � for j = 1; � � � ; K � 1. Let us compute theprobability �. It is easy to see that
K�1
j=1
PPP 0 Sm1 > h \ fd(Y1; � � � ; Ym) = j > 0g + PPP 0 S
m1 < h
= 1:
Hence
� =
1�K�1
j=1
PPP 0 Sm1 (j; 0) < h
K � 1
=1� [PPP (z < x)]K�1
K � 1=
1� [1� �(x)]K�1
K � 1:
C. Mean Time Before a False Isolation
The mean time�T� before a false isolation of aj-type is given byexactly the same equation as in the previous case
�T� = Ei infr�1
f �Nr: ��r = j 6= ig =m
�ij
where
�ij = PPP i[fSm1 > hg \ fd(Y1; � � � ; Ym) = j > 0g]is the probability of aj-type’s false isolation for theK-slippageproblem. It is easy to see that�ij = � for j = 1; � � � ; K � 1 and1 � i 6= j � K � 1;K � 3. To simplify the notations we assumethat i = 1 and j = 2. Let us consider the probability�. First, itcan be shown that
� = PPP 1 Sm1 � h \ fd(Y1; � � � ; Ym) = 2g
= PPP 1 Sm1 (2; 0) � h \ S
m1 (2; 0) > S
m1 (1; 0)
\ � � � \ Sm1 (2; 0) > S
m1 (K � 1; 0)
� PPP 0 Sm1 (2; 0) � h \ S
m1 (2; 0) > S
m1 (1; 0)
\ � � � \ Sm1 (2; 0) > S
m1 (K � 1; 0) :

776 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 43, NO. 2, MARCH 1997
Hence,� � �. Second, from the definition of the decision functiond it follows that
� = PPP 1 Sm1 (2; 0) � h \ S
m1 (2; 0) > S
m1 (1; 0)
\ � � � \ Sm1 (2; 0) > S
m1 (K � 1; 0)
� PPP 1 Sm1 (2; 0) > h \ h > S
m1 (1; 0)
\ � � � \ h > Sm1 (K � 1; 0)
� PPP 0 Sm1 (2; 0) � h PPP 1 S
m1 (1; 0) < h
K�1
j=3
PPP 0 Sm1 (j; 0) < h
� �(x)[1� �(y)][1� �(x)]K�3
:
D. Probability of a False Isolation
Let us compute now the probability of aj-type’s false isolation
�� = PPP 1(�� = 2) =
1
n=1
PPP 1(dn = 2 j �N = nm)PPP 1( �N = nm)
where dn = d(Y(n�1)m+1; � � � ; Ynm). Because the decisiondn isindependent ofn, the above probability can be rewritten as
�� = PPP 1(d1 = 2 j �N = m) = PPP 1 d1 = 2 j Sm1 � h :
By using the definition of the conditional probabilityPPP 1(d1 = 2 jSm1 � h) we, finally, get
�� =PPP 1 Sm1 � h \ fd(Y1; � � � ; Ym) = 2g
1� PPP 1 Sm1 < h=
�
1� �:
Therefore, we have derived formulas (21)–(24). The proof of The-orem 2 is complete.
REFERENCES
[1] M. Basseville and I. Nikiforov,Detection of Abrupt Changes. Theory andApplications (Prentice-Hall Information and System Sciences Series).Englewood Cliffs, NJ: Prentice-Hall, 1993.
[2] T. S. Ferguson,Mathematical Statistics. A Decision Theoretic Approach.New York and London: Academic, 1967.
[3] B. K. Ghosh, Sequential Tests of Statistical Hypotheses. Cambridge,MA: Addison-Wesley, 1970.
[4] B. K. Ghosh and P. K. Sen, Eds.,Handbook of Sequential Analysis.New York: Marcel Dekker, 1991.
[5] E. L. Lehmann,Testing Statistical Hypotheses, 2nd ed. New York:Wiley, 1986.
[6] G. Lorden, “Procedures for reacting to a change in distribution,”Ann.Math. Stat., vol. 42, pp. 1897–1908, 1971.
[7] G. Moustakides, “Optimal procedures for detecting changes in distribu-tions,” Ann. Stat., vol. 14, pp. 1379–1387, 1986.
[8] I. V. Nikiforov, “A generalized change detection problem,”IEEE Trans.Inform. Theory, vol. 41, no. 1, pp. 171–187, Jan. 1995.
[9] , “Sequential optimal detection and isolation of faults in systemswith random disturbances,” inProc. American Control Conf.(Baltimore,MD, June–July 1994), vol. 2, pp. 1853–1857.
[10] E. S. Page, “Continuous inspection schemes,”Biometrika, vol. 41, pp.100–115, 1954.
[11] B. W. Parkinson and P. Axelrad, “Autonomous GPS integrity monitoringusing the pseudorange residual,”Navigation, vol. 35, no. 2, pp. 255–274,1988.
[12] L. Pelkowitz and S. C. Schwartz, “Asymptotically optimum samplesize for quickest detection,”IEEE Trans. Aerosp. Electron. Syst., vol.AES-23, pp. 263–272, Mar. 1987.
[13] A. N. Shiryaev, “The problem of the most rapid detection of a distur-bance in a stationary regime,”Sov. Math.–Dokl., no. 2, pp. 795–799,1961.
[14] , “On optimum methods in quickest detection problems,”TheoryProb. Appl., vol. 8, pp. 22–46, 1963.
[15] , “On detection of disorder in a manufacturing process II, ”TheoryProb. Appl., vol. 8, pp. 402–413, 1963.
[16] A. Wald, Sequential Analysis. New York: Wiley, 1947.
Polynomial Interpolation and Prediction ofContinuous-Time Processes from Random Samples
Elias Masry,Fellow, IEEE
Abstract—We consider the interpolation and prediction of continuous-time second-order random processes from a finite number of randomlysampled observations using Lagrange polynomial estimators. The sam-pling processftjg is a general stationary point process on the real line. Weestablish upper bounds on the mean-square interpolation and predictionerrors and determine their dependence on the mean sampling rate�and on the number of samples used. Comparisons with the Wiener–Hopfestimator are given.
Index Terms—Lagrange interpolation, Wiener–Hopf estimation, ran-dom sampling, mean-square errors.
I. INTRODUCTION
One of the classical problems in signal estimation is the recoveryof a continuous-time signalf(t) from a sequence of its samplesff(tj)g. The well-known Shannon’s sampling theorem interpolates aband-limited signal from equally spaced samples taken at the Nyquistrate. Sampling schemes which take into account jitter, lost samples(skipping), and other read-in errors were considered in [1], [3], [4],[9], [10], [12], and [15].
This correspondence is concerned with the interpolation and predic-tion of second-order stochastic signalsfX(t);�1 < t <1g froma finite number of samplesfX(tj)g where the sampling instantsftjg constitute a stationary, orderly, point process on the real linewith mean rate� which is independent ofX [2], [6], [8]. A linearWiener–Hopf approach for estimationX(t) via
X(t) =
1
i=�1
X(ti)h(t� ti) (1.1)
was considered in [9] where the optimal filterh(t) is obtained byminimizing the mean-square estimation errore2 = E[X(t)�X(t)]2.The derivations in [9] are heuristic in nature and exact conditionsunder which the results hold are not given. However, as can be seenfrom the results in [3] and [10], The Wiener–Hopf approach hasserious drawbacks.
a) The optimal filter requires the knowledge of the second-orderstatistics of the processesfX(t);�1 < t < 1g and ftjgwhich may not be available.
b) The optimal filter may require infinitely many samples whetherit is realizable or unrealizable.
Manuscript received October 17, 1995; revised August 19, 1996.This work was supported by the Office of Naval Research under Grant
N00014-90-J-1175.The author is with the Department of Electrical and Computer Engineering,
University of California at San Diego, La Jolla, CA 92093 USA.Publisher Item Identifier S 0018-9448(97)00628-7.
0018–9448/97$10.00 1997 IEEE