-
KAP 140 AUTOPILOT SYSTEM
Two Axis/Altitude Preselect Operations
83Rev. 2May/02
AP
G
KAP 140
HDG NAV APR REV ALT DN
UP
AP
G
KAP 140
HDG NAV APR REV ALT DN
UP
P R
P R1
2 4 5 6 7 8 93
17 16 15 14
13
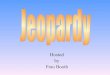
Full KAP 140 Two-Axis with Altitude Preselect Display
Two-axis w/Altitude PreSelect Flight Control Computer
ARM BARO
ARM BARO
10
12 11
18
KAP 140 Two Axis with Altitude Preselect Operation
The KAP 140 is a digital, panel-mounted autopilot system for
light air-craft.
1. PITCH AXIS, (P) ANNUNCIATOR- When illuminated, indicates
failureof the pitch axis and will disengagethe autopilot when the
failure occursand not allow engagement of thepitch axis.
2. AUTOPILOT ENGAGE/DISEN-GAGE (AP) BUTTON - Whenpushed, engages
autopilot if all logicconditions are met. The autopilot willengage
in the basic roll (ROL) modewhich functions as a wing levelerand in
the vertical speed (VS) holdmode. The commanded verticalspeed is be
displayed in the upperright corner of autopilot display areafor
three seconds after engagementor if either the UP or DN button
ispressed. The captured VS will be thevertical speed present at
themoment of AP button press. Whenpressed again, will disengage
theautopilot. For software version 03/01
and later, the AP button must bepressed and held for 0.25
secondsto engage the autopilot.
3. ROLL AXIS (R) ANNUNCIATOR- When illuminated, indicates
failureof the roll axis and will disengage theautopilot and not
allow engagement.
4. HEADING (HDG) MODE SELEC-TOR BUTTON - When pushed, willarm
the Heading mode, which com-mands the airplane to turn to
andmaintain the heading selected by theheading bug on either the DG
orHSI. A new heading may beselected at any time and will result
inthe airplane turning to the new head-ing. Button can also be used
to tog-gle between HDG and ROL modes.This button will engage the
autopilotin units with software prior to soft-ware version
03/01.
-
Two Axis/Altitude Preselect Operations
84 KAP 140 AUTOPILOT SYSTEMRev. 1Apr/02
5. NAVIGATION (NAV) MODESELECTOR BUTTON - Whenpushed, will arm
the navigationmode. The mode provides automaticbeam capture and
tracking of VOR,LOC or GPS as selected for presen-tation on the HSI
or CDI. NAV modeis recommended for enroute naviga-tion tracking.
NAV mode may alsobe used for front course LOC track-ing when GS
tracking is not desired.
6. APPROACH (APR) MODESELECTOR BUTTON - Whenpushed, will arm the
Approachmode. This mode provides auto-matic beam capture and
tracking ofVOR, GPS, LOC, and Glideslope(GS) on an ILS, as selected
for pre-sentation on the HSI or CDI. APRmode is recommended for
instru-ment approaches.
7. BACK COURSE APPROACH(REV) MODE SELECTOR BUTTON- When pushed,
will arm the BackCourse approach mode. This modefunctions similarly
to the approachmode except that the autopilotresponse to LOC
signals isreversed, and GS is disabled.
8. ALTITUDE HOLD (ALT) MODESELECT BUTTON - When pushed,will
select the Altitude Hold mode.This mode provides tracking of
thereference altitude. The reference alti-tude is the altitude at
the momentthe ALT button is pressed. If the ALTbutton is pressed
with an establishedVS rate present, there will be altitudeovershoot
(approximately 10% of theVS rate), with the airplane
returnedpositively to the reference altitude.This button will
engage the autopilotin units with software prior to soft-ware
version 03/01.
9. VERTICAL TRIM (UP/DN) BUT-TONS - The action of these
buttonsis dependent upon the vertical modepresent when pressed. If
VS mode isactive, the initial button stroke willbring up the
commanded verticalspeed in the display. Subsequentimmediate button
strokes will incre-ment the vertical speed commandedeither up or
down at the rate of 100ft/min per button press, or at the rateof
approximately 300 ft/min per sec-ond if held continuously. If
ALTmode is active, incremental buttonstrokes will move the altitude
holdreference altitude either up or downat 20 feet per press, or if
held contin-uously will command the airplane upor down at the rate
of 500 ft/min,synchronizing the altitude hold refer-ence to the
actual airplane altitudeupon button release.
(Note that the altitude hold referenceis not displayed. The
display willcontinue to show the altitude alerterreference.)
10. ROTARY KNOBS - Used to setthe altitude alerter reference
altitude;or may be used immediately afterpressing the BARO button,
to adjustthe autopilot baro setting to matchthat of the airplane’s
altimeter whenmanual adjustment is required. (Insome installations
the baro setting isautomatically synced to that of
thealtimeter.)
11. BARO SET (BARO) BUTTON -When pushed and released, willchange
the display from the altitudealerter selected altitude to the
barosetting display (either IN HG or HPA)for 3 seconds. If pushed
and held for2 seconds, will change the baro set-ting display from
IN HG to HPA or
-
KAP 140 AUTOPILOT SYSTEM
Two Axis/Altitude Preselect Operations
85Rev. 1Apr/02
vice versa. Once the baro settingdisplay is visible the rotary
knobsmay be used to manually adjust thebaro setting if automatic
baro correc-tion is not available.
12. ALTITUDE ARM (ARM) BUT-TON - When pushed will toggle
alti-tude arming on or off. When ALTARM is annunciated, the
autopilotwill capture the altitude alerter dis-played altitude
(provided the aircraftis climbing or descending in VS tothe
displayed altitude). When theautopilot is engaged, ALT arming
isautomatic upon altitude alerter alti-tude selection via the
rotary knobs.Note that the alerter functions areindependent of the
arming processthus providing full time alerting, evenwhen the
autopilot is disengaged.
13. ALTITUDE ALERTER/VERTI-CAL SPEED/BARO SETTING DIS-PLAY -
Normally displays the alti-tude alerter selected altitude. If theUP
or DN button is pushed while inVS hold, the display changes to
thecommand reference for the VSmode in FPM for 3 seconds. If
theBARO button is pushed, the displaychanges to the autopilot baro
settingin either IN HG or HPA for 3 sec-onds.
NOTE: This display may be dashedfor up to 3 minutes on start up
if ablind encoder is installed whichrequires a warm up period.
14. ALTITUDE ALERT (ALERT)ANNUNCIATION - The ALERTannunciate is
illuminated 1000 ft.prior to the selected altitude, extin-guishes
200 ft. prior to the selectedaltitude and illuminates
momentarilywhen the selected altitude is
reached. Once the selected altitudeis reached a flashing ALERT
illumi-nation signifies that the 200 ft. “safeband” has been
exceeded and willremain illuminated until 1000 ft. fromthe selected
altitude. Associated withthe visual alerting is an aural alert
(5short tones) which occurs 1000 feetfrom the selected altitude
uponapproaching the altitude and 200feet from the selected altitude
onleaving the altitude.
15. PITCH TRIM (PT) ANNUNCIA-TION - A flashing PT with
arrowsindicates the direction of requiredpitch trim. A solid PT
without anarrow head is an indication of a pitchtrim fault. During
manual electric trimoperation (autopilot disengaged),detection of a
stuck MET switch willbe indicated by a solid PT. When thefault is
corrected, the annunciationwill extinguish.
16. PITCH MODE DISPLAY -Displays the active and armed pitchmodes
(VS, ALT, ARM, ALT andGS).
17. ROLL MODE DISPLAY -Displays the active and armed rollmodes
(ROL, HDG, NAV ARM,NAV, APR ARM, APR, REV ARM,REV, GS ARM). Also
displayed willbe flashing AP annunciation (5 sec-onds) at each
autopilot disconnectaccompanied by an aural tone (for
2seconds).
18. AUTOPILOT ENGAGED (AP)ANNUNCIATION - Illuminates when-ever
the autopilot is engaged.Flashes during pilot initiated or
auto-matic disengagement. Only applica-ble for software versions
03/01 orlater.
-
Two Axis/Altitude Preselect Operations
86 KAP 140 AUTOPILOT SYSTEMRev. 2
May/02
AP
G
KAP 140
HDG NAV APR REV ALT DN
UP
ARM BARO
Vertical Speed (VS) Mode
The Vertical Speed (VS) modeallows variable speed climbs
anddescents. The ALT button togglesbetween altitude hold and
verticalspeed modes.
Note: The KAP 140 engages into VSmode as a default.
To operate in the VS mode(with autopilot currently
disengaged):
1. AP button - Press. Note ROL,VS and current vertical speed
isdisplayed. If no other modes areselected the autopilot will
operatein the ROL and vertical speedhold modes. For software
version03/01 and later, the AP buttonmust be pressed and held for
0.25seconds to engage the autopilot.
2. UP or DN button - Selectdesired climb or descent rate.Each
button stroke will incrementthe vertical speed commanded upor down
by 100 ft/min per buttonpress, or at the rate of approxi-mately 300
ft/min per second ifheld continuously.
To initiate a climb or descent fromAltitude Hold (ALT) mode:
1. ALT button - Press. Note ALT
System Operating Modes
The lateral modes (HDG, NAV, APR and REV) operate identically as
depictedin the KAP 140 Single Axis Operating Modes section. Please
refer to that sec-tion for text descriptions of lateral mode
operation.
changes to VS and current verticalspeed is displayed.
2. UP or DN button - Selectdesired climb or descent rate.Each
button stroke will incrementthe vertical speed commanded upor down
by 100 ft/min per buttonpress, or at the rate of approxi-mately 300
ft/min per second ifheld continuously.
Note: VS command value will be dis-played during Control
WheelSteering (CWS) and for three sec-onds following VS engagement
orpressing the UP or DN button. Bothaltitude and vertical speed
utilize thesame display area. Altitude is alwaysdisplayed except
during verticalspeed selection. If the VS commandvalue is not
displayed, pressing (andreleasing) the UP or DN button willnot
change the indicated altitude ref-erence but will display the VS
com-mand value.
Note: When operating at or near thebest rate of climb airspeed,
at climbpower settings, and using verticalspeed hold, it is easy to
decelerateto an airspeed where continueddecreases in airspeed will
result in areduced rate of climb. Continuedoperation in vertical
speed mode canresult in a stall.
-
AP
G
KAP 140
HDG NAV APR REV ALT DN
UP
ARM BARO
KAP 140 AUTOPILOT SYSTEM
Two Axis/Altitude Preselect Operations
87Rev. 1Apr/02
Altitude Hold (ALT) Mode
The Altitude Hold (ALT) modemaintains the pressure
altitudeacquired upon selection of altitudehold. The ALT button
togglesbetween altitude hold and verticalspeed modes.
To operate in the ALT mode(with autopilot currently in
theVertical Speed mode):
1. ALT button - Press. Note ALTis annunciated and
autopilotmaneuvers to maintain pressurealtitude acquired at button
selec-tion.
2. UP or DN button - Select tochange altitude. Incremented
but-ton strokes will move the refer-ence altitude by 20 feet per
press,or if held continuously will com-mand a 500 ft/min altitude
change,acquiring a new reference altitudeupon button release.
Note: Incremented altitude changesshould be limited to 500 ft.
ofchange.
-
Two Axis/Altitude Preselect Operations
88 KAP 140 AUTOPILOT SYSTEMRev. 1Apr/02
Baro unit conversion
The barometric pressure display cantoggled between IN HG and HPA
asneeded by the pilot.
1. BARO button - Press and holdfor two seconds.
Altitude Alerter
The function of the Altitude Alerter isindependent of the
autopilot.
1. ALTITUDE SELECT knob -ROTATE until the desired altitudeis
displayed.
Note: The ALERT annunciation isilluminated 1000 ft. prior to
theselected altitude, extinguishes 200 ft.prior to the selected
altitude and illu-minates momentarily when theselected altitude is
reached. Oncethe selected altitude is reached, aflashing ALERT
illumination signifiesthat the 200 ft. “safe band” has beenexceeded
and will remain illuminateduntil 1000 ft. from the selected
alti-tude. Associated with the visual
Altimeter Setting
Installations with remote baroinput
1. BARO setting - CHECK.depressing the BARO button willdisplay
the baro setting for threeseconds.
Installations without remote baroinput
Upon successful completion of pre-flight test, the baro display
will flash.
1. BARO setting - Enter baromet-ric setting using the rotary
knobsOR if correct as displayed, pressBARO.
Note: It is recommended that thebaro value be updated whenever
theaircraft altimeter setting is changed.
Altitude Alerting and Preselect
The Altitude Preselect function allows capturing of a desired
altitude andtransferring into altitude hold. Manual input of
desired altitude is accomplishedthrough the rotary knobs on the
faceplate of the KAP 140.
The Altitude Alerting function will visually and aurally
announce approaching,acquiring and deviation from a selected
altitude.
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UPAP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
-
alerting is an aural alert (five shorttones) which occurs 1000
ft. from theselected altitude upon approachingthe altitude and 200
ft. from theselected altitude on leaving the alti-tude.
Altitude Preselect
1. ALTITUDE SELECT knob -ROTATE until desired altitude
isdisplayed. ARM annunciationoccurs automatically upon
altitudeselection when the autopilot isengaged.
2. Airplane - ESTABLISH desiredvertical speed to intercept
theselected altitude.
3. Upon altitude capture, ALTARM will extinguish and ALT willbe
annunciated.
Note: Altitude preselect captures arenot recommended on
non-precisionapproaches to capture the MDA.Glideslope coupling will
preclude analtitude capture on an ILS.
KAP 140 AUTOPILOT SYSTEM
Two Axis/Altitude Preselect Operations
89Rev. 1Apr/02
Voice Messaging
The following standard voice mes-sages will be annunciated as
condi-tions warrant:
1. “TRIM IN MOTION, TRIM INMOTION…” - Pitch trim runningfor more
than 5 seconds.
2. “CHECK PITCH TRIM” - Anout of trim condition has existedfor
15 seconds.
a. Airplane Control Wheel -GRASP FIRMLY, press CWSand check for
an out of pitch trimcondition. Manually retrim asrequired.
b. CWS button - RELEASE.
c. AUTOPILOT OPERATION -CONTINUE if satisfied that theout of
trim condition was tempo-rary. DISCONTINUE if evidenceindicates a
failure of the auto trimfunction.
The following optional voice mes-sages will be annunciated if
the sys-tem is configured for voice messag-ing:
1. “ALTITUDE” - 1000 feetbefore approaching selected
alti-tude.
2. “LEAVING ALTITUDE” - 200feet away, departing selected
alti-tude.
3. “AUTOPILOT” - Autopilot hasdisengaged, either through
pilotaction or automatically.
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
AP
G
KFC 140
HDG NAV APR REV ALT
ARM BARO
DN
UP
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
9091
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N
33 30W
2421
S1512
E
63
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
33 30
W
2421
S
1512E
63
P
US
H
PUSH
OR
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30 W24
21S
15
12E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30 W24
21S
15
12E6
3
P
US
H
PUSH
OR
ARM
BARO
N
080°
010°
12
34
12
34
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 33
30W
24
21S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 33
30W
24
21S15
12E
6
3
P
US
H
PUSH
OR
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 33
30W
24
21S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 33
30W
24
21S15
12E
6
3
P
US
H
PUSH
OR
ARM
BARO
OP
ER
AT
ION
S W
ITH
TH
E K
AP
140
Tak
eoff
An
d C
limb
To
Ass
ign
ed A
ltit
ud
e
3. T
he a
utop
ilot i
s re
spon
ding
to th
e he
adin
g se
lect
mod
e w
ith a
left
bank
. The
clim
b ra
te h
as b
een
decr
ease
d, u
sing
the DN
butto
n, in
pre
para
tion
for
leve
l out
. Th
e ve
rtic
al s
peed
val
ue w
ill b
edi
spla
yed
upon
sel
ectio
n of
the DN
butto
n an
dw
ill re
mai
n fo
r thr
ee s
econ
ds.
4. D
esire
d al
titud
e ha
s be
en r
each
ed a
nd a
uto-
mat
ic a
ltitu
de c
aptu
re o
ccur
s. T
he a
utop
ilot h
asco
mpl
eted
the
turn
and
is n
ow e
stab
lishe
d on
a01
0°he
adin
g.
1. T
he a
ircra
ft is
wel
l off
the
grou
nd a
nd e
stab
-lis
hed
at a
saf
e cl
imb
rate
.Th
e he
adin
g bu
g on
the
DG o
r HSI
is tu
rned
toth
e de
sire
d he
adin
g of
080
°(r
unw
ay h
eadi
ng).
By d
epre
ssin
g th
e HDG
butto
n on
the
KAP
140,
the
auto
pilo
t eng
ages
into
the
head
ing
and
ver-
tical
spe
ed m
odes
and
mai
ntai
ns t
he s
elec
ted
head
ing
of 0
80°
and
curr
ent r
ate
of c
limb.
Note
: Pre
ss a
nd h
old
the AP
butto
n fo
r 0.
25se
cond
s to
eng
age
the
auto
pilo
t (a
pplic
able
only
to s
oftw
are
vers
ion
03/0
1 an
d la
ter)
.
2. T
he h
eadi
ng b
ug o
n th
e DG
or
HSI i
s tu
rned
toth
e ne
w d
esire
d he
adin
g of
010
°an
d th
e ai
rcra
ftbe
gins
to re
spon
d w
ith a
n im
med
iate
left
turn
. Acr
uise
alti
tude
of 7
,000
feet
is e
nter
ed u
sing
the
rota
ry k
nobs
. Alti
tude
ARM
annu
ncia
tion
occu
rsau
tom
atic
ally
upo
n se
lect
ion.
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
9293
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. W
hen
the
com
pute
d ca
ptur
e po
int
is r
each
ed,
the ROL
annu
ncia
tion
chan
ges
to NAV
and
arig
ht tu
rn is
initi
ated
by
the
auto
pilo
t.
4. T
he tu
rn is
com
plet
e an
d th
e au
topi
lot i
s tra
ck-
ing
the
GPS
cour
se.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
33 30W
2421
S
1512
E
63
P
US
H
PUSH
TO FR
N
SE
W
33 30
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
33 30
W
2421
S
1512E
63
P
US
H
PUSH
TO FR
N
SE
W
33 30
2421
1512
63
OBS
GS
ı
ARM
BARO
N 1
23
4
40°
010°
1. C
ontin
uing
on
head
ing
010°
, a G
PS w
aypo
int i
ses
tabl
ishe
d. A
30°
inte
rcep
t is
desi
red.
2. T
he HDG
butto
n is
dep
ress
ed t
o se
lect
ROL
mod
e w
hich
will
allo
w a
n “a
ll an
gle
inte
rcep
t”.
GPS
data
is s
elec
ted
for t
he C
DI a
nd th
e OB
S is
set
to 0
40°.
The
NAV
butto
n is
dep
ress
ed a
ndNAVARM
is a
nnun
ciat
ed. ROL
will
cha
nge
toHDG
and
flash
for
fiv
e se
cond
s. ROL
will
the
nbe
red
ispl
ayed
. Whi
le t
he HDG
annu
ncia
tion
isfla
shin
g, m
ove
the
head
ing
bug
to t
he d
esire
dco
urse
of
040°
. The
airc
raft
will
rem
ain
win
gsle
vel u
ntil
the
capt
ure
poin
t.
GP
S C
aptu
re U
sin
g D
G
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30 W24
21S
15
12E6
3
P
US
H
PUSH
TO FR
N
S
E
W
33
3024
2115
126
3
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30 W24
21S
15
12E6
3
P
US
H
PUSH
TO FR
N
SE
W
33 30
2421
1512
63
OBS
GS
ı
ARM
BARO
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
9495
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
N 1
23
4
40°
010°
3. W
hen
the
com
pute
d ca
ptur
e po
int
is r
each
ed,
the HDG
annu
ncia
tion
chan
ges
to NAV
and
arig
ht tu
rn is
initi
ated
by
the
auto
pilo
t.
4. T
he tu
rn is
com
plet
e an
d th
e au
topi
lot i
s tra
ck-
ing
the
GPS
cour
se.
1. C
ontin
uing
on
head
ing
010°
, a G
PS w
aypo
int i
ses
tabl
ishe
d. A
30°
inte
rcep
t is
desi
red.
2. G
PS d
ata
is s
elec
ted
for
the
HSI.
The
cour
sepo
inte
r is
set
to
040°
. Th
e NAV
butt
on i
sde
pres
sed
and NAVARM
is a
nnun
ciat
ed.
GP
S C
aptu
re U
sin
g H
SI
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30 W24
21S
15
12E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30 W24
21S
15
12E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N
33 30W
2421
S
1512E
63
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N
33 30W
2421
S
1512E
63
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
9697
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. A
t the
des
ired
poin
t, HDG
mod
e is
use
d to
initi
-at
e th
e pr
oced
ure
turn
. Sel
ect HDG
and
set t
hehe
adin
g bu
g to
283
°. D
urin
g th
e pr
oced
ure
turn
outb
ound
, the
CDI
cou
rse
inde
x go
es o
ff sc
ale
to th
e rig
ht. T
he a
ircra
ft is
flyi
ng a
way
from
the
loca
lizer
cen
terli
ne a
t a 4
5°an
gle
on a
sel
ecte
dhe
adin
g of
283
°.
* Ch
eck
the
head
ing
disp
laye
d on
the
DG
agai
nst
the
mag
netic
com
pass
and
rese
t if n
eces
sary
.
4. N
ow y
ou h
ave
rese
t th
e he
adin
g bu
g to
103
°an
d m
ade
a 18
0°tu
rn t
o th
is h
eadi
ng.
This
103°
head
ing
will
inte
rcep
t the
fron
t cou
rse
of05
8°. Y
ou m
ust n
ow s
elec
t the
app
roac
h m
ode
by d
epre
ssin
g th
e APR
butto
n on
the
KAP
140.
* Th
e HDG
annu
ncia
tion
will
flas
h fo
r fiv
e se
c-on
ds th
en e
xtin
guis
h. W
hile
the HDG
annu
ncia
-to
r is
fla
shin
g, m
ove
the
head
ing
bug
to t
hefro
nt c
ours
e 05
8°. S
ince
the
45°
inte
rcep
t is
103°
, the
airc
raft
will
not
tur
n un
til t
he f
ront
cour
se is
cap
ture
d.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
3330
W
2421 S
1512
E
63
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
N A V
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30W
24
21S15
12E
6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
N A V
ı
ARM
BARO
N1
2
3
4
270°
283°
058°
238°
283°
103°
1. T
he a
ircra
ft is
hea
ding
270
°w
ith h
eadi
ng a
ndal
titud
e ho
ld e
ngag
ed. T
o in
terc
ept a
nd fl
y th
eIL
S fro
nt c
ours
e ou
tbou
nd, s
et th
e fro
nt c
ours
eon
the
OBS
and
dep
ress
th
e re
vers
e co
urse
(REV
) bu
tton.
The
HDG
annu
ncia
tion
will
flas
hfo
r fiv
e se
cond
s th
en e
xtin
guis
h. W
hile
the
HDG
annu
ncia
tion
is f
lash
ing,
mov
e th
e he
ad-
ing
bug
to t
he f
ront
cou
rse
058°
. Sin
ce HDG
was
act
ive
upon
sel
ectio
n of
REV
the
auto
pilo
tw
ill in
itiat
e a
45°
inte
rcep
t to
the
loca
lizer
sig
-na
l. In
this
cas
e, th
e ai
rcra
ft w
ill tu
rn to
283
°.
2. W
hen
the
com
pute
d ca
ptur
e po
int
is r
each
ed,
auto
inte
rcep
t m
ode
is c
ance
lled
and
reve
rse
loca
lizer
mod
e is
aut
omat
ical
ly a
ctiv
ated
and
ale
ft tu
rn o
utbo
und
on th
e lo
caliz
er is
initi
ated
by
the
auto
pilo
t.
Note:Theleft-rightdeviatio
nsoftheCDIcourse
deviationne
edle
arereve
rsed
(you
mus
tturn
righ
tto
center
ade
viationof
theinde
xto
theleft).Th
isne
edle
reve
rsingtake
splac
ebe
caus
eyo
uarefly
-ingoutboundonafrontc
ourse.
Ou
tbo
un
d O
n F
ron
t C
ou
rse
Fo
r P
roce
du
re T
urn
To
ILS
Ap
pro
ach
Usi
ng
DG
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30W
24
21 S15
12E
6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
N A V
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30
W24
21
S 15
12
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
N A V
ı
ARM
BARO
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
9899
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. A
t the
des
ired
poin
t, HDG
mod
e is
use
d to
initi
-at
e th
e pr
oced
ure
turn
. D
urin
g th
e pr
oced
ure
turn
out
boun
d, th
e de
viat
ion
bar
show
s th
at th
eai
rcra
ft is
flyi
ng a
way
from
the
loca
lizer
cen
ter-
line
at a
45°
angl
e on
a s
elec
ted
head
ing
of28
3°.
4. N
ow y
ou h
ave
rese
t th
e he
adin
g bu
g to
103
°an
d m
ade
a 18
0°tu
rn t
o th
is h
eadi
ng.
The
103°
head
ing
will
inte
rcep
t the
fron
t cou
rse
of05
8°. Y
ou m
ust n
ow s
elec
t the
app
roac
h m
ode
by d
epre
ssin
g th
e APR
butto
n on
the
KAP
140.
Auto
mat
ic c
aptu
re o
f the
loca
lizer
will
occ
ur.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21 S
15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N
3330
W
2421S
1512
E
63
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
N1
23
4
270°
058°
238°
283°
103°
1. T
he a
ircra
ft is
hea
ding
270
°w
ith h
eadi
ng a
ndal
titud
e ho
ld e
ngag
ed. T
o in
terc
ept a
nd fl
y th
eIL
S fro
nt c
ours
e ou
tbou
nd, s
et th
e fro
nt c
ours
eon
the
HSI a
nd d
epre
ss t
he b
ack
cour
se (REV
)bu
tton
. Th
e ba
ck c
ours
e (REV
) m
ode
isse
lect
ed t
o go
out
boun
d on
the
fro
nt c
ours
e.Th
e ca
ptur
e po
int
is n
ow b
eing
com
pute
dba
sed
on c
losu
re ra
te.
2. W
hen
the
com
pute
d ca
ptur
e po
int
is r
each
ed,
HDG
mod
e is
can
celle
d an
d re
vers
e lo
caliz
erm
ode
is a
utom
atic
ally
act
ivat
ed a
nd a
left
turn
outb
ound
on
the
loca
lizer
is in
itiat
ed b
y th
eau
topi
lot.
Note:Theleft-rightdeviatio
nsoftheHSIcourse
needle
operate
justasthoughyouwere
flyinga
fron
tcou
rseap
proa
ch.
Ou
tbo
un
d O
n F
ron
t C
ou
rse
Fo
r P
roce
du
re T
urn
To
ILS
Ap
pro
ach
Usi
ng
HS
I
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21 S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N3330
W24
21
S 1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
100
101
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. A
t th
e m
iddl
e m
arke
r, th
e pi
lot
dise
ngag
es t
heau
topi
lot
with
the
but
ton
on t
he c
ontro
l whe
el.
This
can
cels
all
oper
atin
g m
odes
. The
fla
shin
gAP
annu
ncia
tions
are
dis
play
ed a
nd a
dis
con-
nect
tone
will
sou
nd.
4. T
he p
ilot i
nitia
tes
the
mis
sed
appr
oach
and
sta
-bi
lizes
the
airc
raft
in t
he c
limb.
The
hea
ding
bug
is s
et t
o th
e m
isse
d ap
proa
ch h
eadi
ng o
f09
0°.
By d
epre
ssin
g th
e HDG
butto
n on
the
KAP
140,
the
auto
pilo
t eng
ages
into
the
head
-in
g an
d ve
rtica
l spe
ed m
odes
, com
men
cing
arig
ht tu
rn to
a h
eadi
ng o
f 090
°an
d m
aint
aini
ngth
e ra
te o
f clim
b ex
istin
g at
eng
agem
ent.
Note
: Pre
ss a
nd h
old
the AP
butto
n fo
r 0.
25se
cond
s to
eng
age
the
auto
pilo
t (a
pplic
able
only
to s
oftw
are
vers
ion
03/0
1 an
d la
ter)
.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 3330
W24
21
S1512
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 33
30
W24
21
S15
12
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
N
12
34
058°
090°
238°
1. C
ontin
uing
the
man
euve
r on
page
96,
APR
cou
-pl
ing
occu
rs (HDG
annu
ncia
tion
chan
ges
toAPR
), an
d th
e gl
ides
lope
mod
e is
aut
omat
ical
lyar
med
. The
aut
opilo
t w
ill c
aptu
re t
he lo
caliz
eran
d th
e CD
I cou
rse
inde
x w
ill c
ente
r.
2. T
he a
utop
ilot
is f
ollo
win
g th
e lo
caliz
er. A
t th
eou
ter
mar
ker,
the
glid
eslo
pe d
evia
tion
need
le is
at m
idsc
ale.
Alti
tude
hol
d is
aut
omat
ical
ly d
isen
-ga
ged
whe
n th
e gl
ides
lope
is c
aptu
red.
The
ALT
annu
ncia
tor
extin
guis
hes
and GS
is d
ispl
ayed
.Th
e au
topi
lot w
ill m
ake
pitc
h an
d ba
nk c
hang
esas
nec
essa
ry t
o m
aint
ain
loca
lizer
and
glid
es-
lope
.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 3330
W24
21
S1512
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 3330
W24
21
S1512
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
12
34
Fro
nt
Co
urs
e IL
S A
pp
roac
h U
sin
g D
G
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
102
103
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. A
t th
e m
iddl
e m
arke
r, th
e pi
lot
dise
ngag
es t
heau
topi
lot
with
the
but
ton
on t
he c
ontro
l whe
el.
This
can
cels
all
oper
atin
g m
odes
. The
fla
shin
gAP
annu
ncia
tions
are
dis
play
ed a
nd a
dis
con-
nect
tone
will
sou
nd.
4. T
he p
ilot i
nitia
tes
the
mis
sed
appr
oach
and
sta
-bi
lizes
the
airc
raft
in t
he c
limb.
The
hea
ding
bug
is s
et t
o th
e m
isse
d ap
proa
ch h
eadi
ng o
f09
0°.
By d
epre
ssin
g th
e HDG
butto
n on
the
KAP
140,
the
auto
pilo
t eng
ages
into
the
head
-in
g an
d ve
rtica
l spe
ed m
odes
, com
men
cing
arig
ht tu
rn to
a h
eadi
ng o
f 090
°an
d m
aint
aini
ngth
e ra
te o
f clim
b ex
istin
g at
eng
agem
ent.
Note
: Pre
ss a
nd h
old
the AP
butto
n fo
r 0.
25se
cond
s to
eng
age
the
auto
pilo
t (a
pplic
able
only
to s
oftw
are
vers
ion
03/0
1 an
d la
ter)
.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
N
12
34
058°
090°
238°
1. C
ontin
uing
the
man
euve
r on
page
98,
APR
cou
-pl
ing
occu
rs (HDG
annu
ncia
tion
chan
ges
toAPR
), an
d th
e gl
ides
lope
mod
e is
aut
omat
ical
lyar
med
. The
aut
opilo
t w
ill c
aptu
re t
he lo
caliz
eran
d th
e CD
I cou
rse
inde
x w
ill c
ente
r.
2. T
he a
utop
ilot
is f
ollo
win
g th
e lo
caliz
er. A
t th
eou
ter
mar
ker,
the
glid
eslo
pe d
evia
tion
need
le is
at m
idsc
ale.
Alti
tude
hol
d is
aut
omat
ical
ly d
isen
-ga
ged
whe
n th
e gl
ides
lope
is c
aptu
red.
The
ALT
annu
ncia
tion
extin
guis
hes
and GS
is d
ispl
ayed
.Th
e au
topi
lot w
ill m
ake
pitc
h an
d ba
nk c
hang
esas
nec
essa
ry t
o m
aint
ain
loca
lizer
and
glid
es-
lope
.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
12
34
Fro
nt
Co
urs
e IL
S A
pp
roac
h U
sin
g H
SI
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
104
105
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
N
12
3
4
058°
270°
238°
283°
103°
3. A
t th
e de
sire
d po
int,
head
ing
mod
e is
use
d to
initi
ate
the
proc
edur
e tu
rn. D
urin
g th
e pr
oced
ure
turn
out
boun
d, th
e de
viat
ion
bar
show
s th
at th
eai
rcra
ft is
flyi
ng a
way
from
the
GPS
cour
se a
t a45
°an
gle
on a
sel
ecte
d he
adin
g of
283
°.
* Ch
eck
the
head
ing
disp
laye
d on
the
DG
agai
nst
the
mag
netic
com
pass
and
rese
t if n
eces
sary
.
4. T
he h
eadi
ng b
ug h
as b
een
set t
o 10
3°an
d th
eai
rcra
ft ha
s m
ade
a le
ft tu
rn t
o th
is h
eadi
ng.
The
GPS’
s Le
g/OB
S m
ode
switc
hing
is s
et t
oLe
g m
ode
and
the
OBS
is s
et t
o 05
8°. S
elec
tap
proa
ch m
ode
by d
epre
ssin
g th
e APR
butto
n.*T
he HDG
annu
ncia
tion
will
flas
h fo
r fiv
e se
c-on
ds th
en e
xtin
guis
h. W
hile
the HDG
annu
ncia
-tio
n is
flas
hing
, mov
e th
e he
adin
g bu
g to
058
°.Si
nce
the
45°
inte
rcep
t is
103°
, the
airc
raft
will
not t
urn
until
the
cour
se is
cap
ture
d.
1. T
he a
ircra
ft is
in APR
mod
e ap
proa
chin
g th
eIA
F. A
ppro
ach
arm
is in
dica
ted
on t
he G
PSan
nunc
iato
r.*
2. U
pon
way
poin
t al
ertin
g at
the
IAF
, the
hea
ding
bug
is s
et t
o 23
8°, t
he G
PS’s
Leg
/OBS
mod
esw
itchi
ng is
set
to
OBS
mod
e an
d th
e OB
S is
set t
o 23
8°. T
he a
utop
ilot i
nitia
tes
a le
ft tu
rn to
track
the
238°
GPS
cour
se.
Ou
tbo
un
d o
n G
PS
Ap
pro
ach
Usi
ng
DG
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30W
24
21 S15
12E
6
3
P
US
H
PUSH
TO FR
N
S
EW
33
3024
21 15
126
3
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30
W24
21
S 15
12
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
33
30W
24
21 S
15
12E
6
3P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N
33
30W
24
21S
15
12E
6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
106
107
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
3. A
t th
e de
sire
d po
int,
head
ing
mod
e is
use
d to
initi
ate
the
proc
edur
e tu
rn. D
urin
g th
e pr
oced
ure
turn
out
boun
d, th
e de
viat
ion
bar
show
s th
at th
eai
rcra
ft is
flyi
ng a
way
from
the
GPS
cour
se a
t a45
°an
gle
on a
sel
ecte
d he
adin
g of
283
°.
4. T
he h
eadi
ng b
ug h
as b
een
set t
o 10
3°an
d th
eai
rcra
ft ha
s m
ade
a le
ft tu
rn t
o th
is h
eadi
ng.
The
GPS’
s Le
g/OB
S m
ode
switc
hing
is s
et t
oLe
g m
ode
and
the
cour
se p
oint
er is
set
to
058°
. Sel
ect a
ppro
ach
mod
e by
dep
ress
ing
the
APR
butto
n.
1. T
he a
ircra
ft is
in APR
mod
e ap
proa
chin
g th
eIA
F. A
ppro
ach
arm
is in
dica
ted
on t
he G
PSan
nunc
iato
r.*
2. U
pon
way
poin
t al
ertin
g at
the
IAF
, the
cou
rse
poin
ter i
s se
t to
238°
, the
GPS
’s L
eg/O
BS m
ode
switc
hing
is s
et to
OBS
mod
e. T
he a
utop
ilot i
ni-
tiate
s a
left
turn
to tr
ack
the
238°
GPS
cour
se.
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21 S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N3330
W24
21
S 1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21 S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
N
12
3
4
058°
270°
238°
283°
103°
Ou
tbo
un
d o
n G
PS
Ap
pro
ach
Usi
ng
HS
I
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
108
109
KAP
140
AUTO
PILO
T SY
STEM
Rev.
2M
ay/0
2Re
v. 1
Apr/0
2
N
1
2
34
058°
090°
238°
FA
F
3. A
t the
MDA
, the
ALT
butto
n is
dep
ress
ed c
aus-
ing
the
auto
pilo
t to
leve
l off
and
mai
ntai
n a
con-
stan
t al
titud
e. A
t th
e M
AP t
he p
ilot
dise
ngag
esth
e au
topi
lot
with
the
but
ton
on t
he c
ontr
olw
heel
. A f
lash
ing AP
annu
ncia
tion
is d
ispl
ayed
and
a di
stin
ctiv
e to
ne w
ill s
ound
.
4. T
he p
ilot i
nitia
tes
the
mis
sed
appr
oach
and
sta
-bi
lizes
the
airc
raft
in t
he c
limb.
The
hea
ding
bug
is s
et t
o th
e m
isse
d ap
proa
ch h
eadi
ng o
f09
0°.
By d
epre
ssin
g th
e HDG
butto
n on
the
KAP
140,
the
auto
pilo
t eng
ages
into
the
head
-in
g an
d ve
rtica
l spe
ed m
odes
, com
men
cing
arig
ht tu
rn to
a h
eadi
ng o
f 090
°an
d m
aint
aini
ngth
e ra
te o
f clim
b ex
istin
g at
eng
agem
ent.
Note
: Pre
ss a
nd h
old
the AP
butto
n fo
r 0.
25se
cond
s to
eng
age
the
auto
pilo
t (a
pplic
able
only
to s
oftw
are
vers
ion
03/0
1 an
d la
ter)
.
1. C
ontin
uing
the
man
euve
r on
pag
e 10
4, APR
mod
e ca
ptur
e oc
curs
. The
aut
opilo
t in
itiat
es a
left
tur
n to
tra
ck t
he 0
58°
GP
S c
ours
e.*
Appr
oach
act
ive
is in
dica
ted
on t
he G
PSan
nunc
iato
r.
2. A
t the
FAF
, ALT
is d
epre
ssed
to a
ctiv
ate
verti
cal
spee
d m
ode.
The
des
ired
des
cent
rat
e is
obta
ined
usi
ng th
e DN
butto
n.
Rem
embe
r,sp
eedne
edsto
beco
ntrolledwith
thethrottle.
Inb
ou
nd
on
GP
S A
pp
roac
h U
sin
g D
G
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 33
30W
24
21S15
12E
6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 3330
W24
21
S1512
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N 3330
W24
21
S1512
E6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
N33
30W
24
21S15
12E
6
3
P
US
H
PUSH
TO FR
N
S
E
W
3330
2421
1512
63
OBS
GS
ı
ARM
BARO
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
12
34
-
KAP
140
AUTO
PILO
T SY
STEM
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
Two
Axis
/Alti
tude
Pre
sele
ct O
pera
tions
110
111
KAP
140
AUTO
PILO
T SY
STEM
Rev.
1Ap
r/02
Rev.
1Ap
r/02
N
1
2
34
058°
090°
238°
FA
F
3. A
t the
MDA
, the
ALT
butto
n is
dep
ress
ed c
aus-
ing
the
auto
pilo
t to
leve
l off
and
mai
ntai
n a
con-
stan
t al
titud
e. A
t th
e M
AP t
he p
ilot
dise
ngag
esth
e au
topi
lot
with
the
but
ton
on t
he c
ontr
olw
heel
. The
fla
shin
g AP
annu
ncia
tions
are
dis
-pl
ayed
and
a d
istin
ctiv
e to
ne w
ill s
ound
.
4. T
he p
ilot i
nitia
tes
the
mis
sed
appr
oach
and
sta
-bi
lizes
the
airc
raft
in t
he c
limb.
The
hea
ding
bug
is s
et t
o th
e m
isse
d ap
proa
ch h
eadi
ng o
f09
0°.
By d
epre
ssin
g th
e HDG
butto
n on
the
KAP
140,
the
auto
pilo
t eng
ages
into
the
head
-in
g an
d ve
rtica
l spe
ed m
odes
, com
men
cing
arig
ht tu
rn to
a h
eadi
ng o
f 090
°an
d m
aint
aini
ngth
e ra
te o
f clim
b ex
istin
g at
eng
agem
ent.
Note
: Pre
ss a
nd h
old
the AP
butto
n fo
r 0.
25se
cond
s to
eng
age
the
auto
pilo
t (a
pplic
able
only
to s
oftw
are
vers
ion
03/0
1 an
d la
ter)
.
1. C
ontin
uing
the
man
euve
r on
pag
e 10
6, APR
mod
e ca
ptur
e oc
curs
. The
aut
opilo
t in
itiat
es a
left
tur
n to
tra
ck t
he 0
58°
GP
S c
ours
e.*
Appr
oach
act
ive
is in
dica
ted
on t
he G
PSan
nunc
iato
r.
2. A
t the
FAF
, ALT
is d
epre
ssed
to a
ctiv
ate
verti
cal
spee
d m
ode.
The
des
ired
des
cent
rat
e is
obta
ined
usi
ng th
e DN
butto
n.
Rem
embe
r,sp
eedne
edsto
beco
ntrolledwith
thethrottle.
Inb
ou
nd
on
GP
S A
pp
roac
h U
sin
g H
SI
* D
escr
iptio
n of
GP
S o
pera
tion
base
d on
Ben
dix/
Kin
g G
PS
rec
eive
r. O
ther
s m
ayre
quire
diff
eren
t ope
ratio
n.
12
34
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 33
30W
24
21S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N 3330
W24
21
S1512
E6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO
LR
2 M
IN.
TU
RN
CO
OR
DIN
AT
OR
NO
PIT
CH
INF
OR
MA
TIO
N
D.C
. EL
EC
.
GSGS
N33
30W
24
21S15
12E
6
3
ı
AP
G
KAP
140
HDG
NAV
APR
REV
ALT
DNUP
ARM
BARO