Embed Size (px)
Citation preview

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 1/25
Level A: Preliminary CTA System Performance Requirements
Author Laboratory Approved by Laboratory
Konrad Bernlöhr (konrad.bernloehr@mpi‐hd.mpg.de)
Oscar Blanch Bigas ([email protected])
Rodolfo Canestrari ([email protected])
Carlos Delgado ([email protected])
Andreas Förster (andreas.foerster@mpi‐hd.mpg.de)
German Hermann
(german.hermann@mpi‐hd.mpg.de)
Jim Hinton ([email protected])
Bruno Khélifi ([email protected])
Giovanni Pareschi ([email protected])
Richard White ([email protected])
plus members of the CTA Design Study Work Packages
German Hermann (Technical Coordinator),
March 31st, 2011
Project Committee, June 7, 2011
Applicable Documents
No. Version Ref. Date Title 1 1.0 TPC‐
SPECS/110331c 2011‐06‐07 Reference Documents for Preliminary CTA Performance
Requirements Level A and B
History
Edition Date Observation 0.0 2011‐03‐31 New document
1.0 2011‐06‐07 Correction of few typos
Distribution CTA internal

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 2/25
‐ Table of Contents ‐
1. INTRODUCTION 3
2. SCIENTIFIC AND PERFORMANCE REQUIREMENTS 4
2.1. OVERVIEW 4 2.2. ENERGY RANGE 4 2.3. FIELD OF VIEW FOR GAMMA‐RAYS ON THE SKY 5 2.4. SYSTEM PERFORMANCE REQUIREMENTS 5
2.4.1 Sensitivity 6 2.4.2 Collection Area 6 2.4.3 Angular Resolution 6 2.4.4 Precision of source localization 6 2.4.5 Energy Resolution 6
3. PHYSICAL REQUIREMENTS 10
3.1. REQUIREMENT OF MORE THAN ONE TELESCOPE TYPE 10 3.2. CAMERA FIELD OF VIEW 10 3.3. PRELIMINARY DEFINITION OF TELESCOPES 10
3.3.1 LST: large‐size telescope 10 3.3.2 MST: mid‐size telescope 11 3.3.3 SST: small‐size telescope, variant 1 (Davies Cotton optics) 11 3.3.4 SST: small‐size telescope, variant 2 (secondary optics) 11
3.4. LAYOUT 11 3.5. ENERGY RANGES COVERED BY TELESCOPE TYPES 11 3.6. ARRAY TRIGGER 12 3.7. DATA ACQUISITION 12 3.8. SYSTEM DEAD TIME DURING OBSERVATIONS 12 3.9. DATA PRODUCTS 13 3.10. ACCURACY OF THE ENERGY SCALE 13
4. OPERATING CONDITIONS 14
4.1. LIGHT LEVELS 14 4.1.1 Background Light Level 14 4.1.2 Signal Light Level 14
4.2. DEFINITION OF OPERATING MODES 16 4.2.1 Normal Operation 16 4.2.2 Critical Situation 16 4.2.3 Emergency Conditions 16 4.2.4 Survival Conditions 17
4.3. ENVIRONMENTAL CONDITIONS 17 4.3.1 Altitude 17 4.3.2 Operational Temperature Range 17 4.3.3 Wind Speed and Power Spectral Density 18 4.3.4 Seismic Activity 19 4.3.5 Lightning 20 4.3.6 Precipitation (rain) 20 4.3.7 Snow and Ice 20 4.3.8 Humidity 21
5. LIFECYCLE, MAINTENANCE 22
5.1. RELIABILITY, AVAILABILITY 22 5.2. MAINTENANCE 22 5.3. LIFE TIME 23 5.4. SAFETY 24

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 3/25
1. Introduct ion
This document collects fundamental performance requirements for a Cherenkov Telescope Array [RD1] (either Northern or Southern site) as a whole (level A). Subsequent documents (for now only to level B) in this collection will provide requirements and specifications at more detailed levels. Level B includes requirements at the sub‐system level (telescope types, array trigger…) which are independent of a specific implementation. A specific implementation would, for example be whether the photo‐sensors are photomultiplier tubes or semiconductor devices, whether signals are read out with analog ring buffers or with FADCs, whether a telescope trigger is based on pixel discriminators and subsequent sector‐wise multiplicity decision or it is based on FPGAs processing continuously digitized PMT pulses. Without reference to a specific implementation, some of the requirements and specifications both here at level A as well as in the companion level B document have to be rather general. Level C and D documents will eventually include specifications at an implementation‐specific level and in more detail. All of the documents in this series are only about the CTA instrument and will not attempt to deal with issues of site selection, with observatory operation etc. – even though, for example, typical site parameters to be expected and consequences of changes of some site parameters on the instrument design may be addressed as well as data rates or other parameters relevant for observatory operation. In Section 2 (Scientific and Performance Requirements) we provide a first set of requirements at a global scale, addressing topics relevant to the astrophysicist who wants to make use of CTA. These include only basic parameters like the energy range to be covered, the field of view on the sky fully usable for science, as well as the sensitivity of a whole CTA instrument and a number of ingredients to achieving an excellent sensitivity. While this section is written without addressing specific sizes of telescope types or their layout, it should be emphasized that the resulting requirements are the result of detailed simulations and analysis codes, having tried a range of different layouts and settling to performance parameters we expect to be achievable with a class of CTA layouts providing a good compromise for a wide range of physics topics (see the Design Concepts document for a selection of physics topics envisaged as well a range of layout variants). Section 3 (Physical Requirements) introduces the types of telescopes which to our current understanding can be used to build a CTA instrument delivering or exceeding the requirements from section 2 within the anticipated cost frame. It also addresses other components needed for a CTA installation. Without the specific implementations at hand, these requirements again are rather general and may, for example, also be met by slightly smaller telescopes with higher quantum efficiency sensors than foreseen as a baseline, or by layouts with more medium‐size telescopes of wider spacing and fewer small telescopes etc. More detailed specifications will be the result of further optimizations of cost versus performance. Section 4 (Operating conditions) provides a collection of expected conditions which are generally not specifications for CTA itself but have to be kept in mind for the instrument design. Depending on the eventual site selection, some of these conditions will have to be detailed later, while other conditions may be relevant for issues of site selection as questions like maximum wind speeds, earthquake hazards, lightning or fires, ambient temperatures and pressure may lead to additional costs. Finally, Section 5 (Lifecycle and Maintenance) addresses issues relevant not just for building a CTA installation but also successfully operating and maintaining it over a period of many years.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 4/25
2. Sc ient i f ic and Performance Requirements
2.1. Overview
The Cherenkov Telescope Array should provide substantial improvements over current very‐high‐energy (VHE) γ‐ray instruments in a number of areas:
Energy range covered.
Sensitivity, in particular in the core energy range (about 100 GeV to 10 TeV), i.e. the energy range where the advantages of IACTs are largest in comparison to other detection techniques.
Effective area.
Gamma‐hadron discrimination.
Angular resolution.
Energy resolution.
Field of view for gamma‐rays
Full sky coverage, through sites on both hemispheres The wide energy range is required for distinguishing different physical processes that can be at action in a γ‐ray source. Over small energy ranges most processes result in power‐law spectra. Only observations over a wider energy ranges will show the characteristic deviations from power laws. Observations with a single instrument have a number of advantages for that purpose, in comparison to combining, for example, observations with Fermi and an IACT instrument: observations are strictly simultaneous and cross‐calibration errors are minimal. The sensitivity actually results from a number of factors, including effective area, gamma‐hadron discrimination and (at least for point‐like sources) angular resolution. The effective area determines the number of γ‐rays detected from a source of a given flux. The gamma‐hadron discrimination tells by how much the omnipresent background of cosmic ray protons and nuclei can be suppressed. In contrast to protons and nuclei, the additional electron background is difficult – if not impossible – to suppress. In either case the background suppression gets more difficult at lower energies because the numbers of interactions and particles involved are lower and therefore fluctuations in the shower development get more important. Remaining backgrounds will not only reduce the statistical significance of source detections but will also vary with off‐axis angle (w.r.t. to the instrument viewing direction), with zenith angle, with angle to the geomagnetic field, with atmospheric conditions etc. Systematic errors in the subtraction of such backgrounds are thus unavoidable and will limit the sensitivity when both, the numbers of detected γ‐rays and of remaining background events are high (or it would result in false detections). An improved angular resolution will both reduce the background on top of a point‐like source, and it will also allow to study the morphology of extended sources in more detail. Improved energy resolution can aid in the detection of possible line emission from dark matter annihilation or decay, in the accurate determination of changes in spectral index, cut‐offs etc.
2.2. Energy range
The energy range to be covered with CTA is limited at the lowest energies by competition with space‐based instruments (e.g. Fermi) which achieve a much better background suppression by direct (non‐)observation of the incoming particles and/or the initial interaction products. The effective areas of space‐based instruments will be many order of magnitudes below that of CTA. The energy below which space‐based instruments can be more sensitive than CTA will differ between steady sources, where data of many years of Fermi observations can be added up, and variable sources, where only CTA will be able to detect a significant number of gamma‐rays in a short time. The sensitivity cross‐over is expected between 50 and 70 GeV for steady point‐like sources and 10 to 20 GeV for variable sources, depending on the time scale. At the highest energies, the flux of any source is so low that a huge area has to be covered with Cherenkov telescopes. Alternate detection techniques, either non‐imaging Cherenkov detectors or more traditional particle detector arrays, may ultimately become more cost‐effective despite their much inferior gamma‐hadron discrimination. A physically well‐motivated aim of detecting gamma‐rays of a few hundred TeV is well within reach of CTA. Such gamma‐rays

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 5/25
would result from interaction of PeV energy cosmic rays and would thus indicate the sources of such cosmic rays (often termed pevatrons). Specification: the accessible energy range of CTA should be 20 GeV to 300 TeV Implications on cost: Reduction of the lower limit would require larger telescopes and more of them, with more accurate control of background systematics (implying a larger camera field of view etc.). Extending the upper limit would require coverage of a substantially larger area with instruments sensitive to very bright showers.
2.3. Field of View for Gamma‐Rays on the Sky
The field of view for gamma‐rays of a telescope system is the angle between the shower direction and the observation direction of the telescopes, at which detection efficiency for reconstructed gamma‐rays drops to 80 % of the on‐axis efficiency. In order to fully contain the shower images, the camera field of view needs to be larger than the field of view for gamma‐rays. A larger camera field of view also results in a larger field of view of a telescope system for gamma‐rays. In order to cover the full energy range, CTA is foreseen to be built of three types of telescopes of different sizes (see 3.1), large telescopes for the low energy section and medium‐size and small‐size telescopes for the mid‐ and high energies, respectively. A uniform size of the gamma‐ray field of view (f.o.v.) across all energies would be desirable but is unachievable due to problems of mechanical stability resulting from high camera weights and extremely long focal lengths as needed for a good optical point‐spread function. With the low energy telescope being in competition to direct detection techniques and aiming mainly at transient and variable sources, looking necessarily point‐like, their requirements differ from those for the medium and high energy instrumentation. Low energy observations will mainly focus on point‐like sources, usually with a single (main) source as its target. In addition, small (few 0.1°) sources and the small‐scale morphology of extended sources will be studied in the 50‐200 GeV energy region. Alternating off‐axis (“wobble‐mode”) observations of 0.5°‐0.7° at 0.1°‐0.3° angular resolution are required for optimal subtraction of cosmic‐ray and electron backgrounds. Specification: The gamma‐ray f.o.v. for the low energy regime should thus extend at least to 1.0° from the axis. Core energy regime and high energies: In addition to point‐like (often variable) sources, observations will include extended (steady) sources, in particular within a few degrees of the Galactic Plane. Multiple sources within the field of view are common and source‐free regions for proper background subtraction are rare unless the f.o.v. extends beyond the Galactic Plane. The number of sources which can be studied simultaneously should increase proportional to the f.o.v. solid angle (and thus the number of pixels in the camera) as long as the f.o.v. is still within the Galactic Plane, and then proportional to the f.o.v. diameter once extending beyond the Galactic Plane. Specification: For optimum overall performance the gamma‐ray f.o.v. radius for the core energy regime and high energies should extend to at least 2.5°.
2.4. System Performance Requirements
The following system performance parameters quantify the performance requirements for CTA as next generation observatory. They are based on large‐scale simulations of many different possible implementations of CTA, analysis mainly by traditional methods (using Hillas parameters etc.) and selection of a near‐optimum configuration based on physics goals. It should be made clear that observations of different types of objects, with different spectra, may be better off with different configurations but the overall mix of observations of a wide range of object types is best served by a balanced configuration putting similar amounts of resources into the different CTA‐subset energy ranges (see figure 1).

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 6/25
2.4.1 Sensitivity
Description: The minimum flux of a point source that can be detected in given observation time. Specification: For 50 hours of observation time about 1 milliCrab in integral sensitivity above a few hundred GeV (core energy range), about 10 milliCrab above 10 TeV. For low energies above 50 GeV a sensitivity of about 10 milliCrab should be achieved in only 5 hours of observation time. (see figure 2). The corresponding differential sensitivities are shown in figure 3.
2.4.2 Collection Area
Description: The collection area, or effective area, is defined as the effective geometric area on the ground over which incident gamma‐ray showers can be detected and reconstructed. It can be calculated as the number of reconstructed showers in a given observation time divided by the incident flux and observation time. Specification: ≥ 0.05 km2 at 50 GeV, ≥ 1 km2 at 1 TeV, ≥ 5 km2 at 100 TeV
2.4.3 Angular Resolution
Description: The ability of CTA to resolve an image spatially on the sky, expressed in degrees as the radius of a circle that contains 68% of the reconstructed image resulting from a pure point source. Specification: 68% containment radius of ≤ 0.15 o at 100 GeV, ≤ 0.05 o at 1 TeV, and ≤ 0.02 o at 100 TeV (see figure 4).
2.4.4 Precision of Source Localization
Description: The precision, at which the position of point sources and slightly extended sources can be determined. For sources that are detected with high count rate and good signal to noise ratio, the statistical error on the source location can be as low as a few arc seconds, or even below. The precision on the source location will then be limited by systematic errors of the instrument. Specification: The systematic error on the localization of point sources is required to be less than 5 arc seconds (rms) in space angle.
2.4.5 Energy Resolution
Description: How well the energy can be reconstructed expressed as a percentage of the true energy. Specification: Better than 10% (rms) for energies above 1 TeV and better than 20% (rms) for energies between 100 GeV and 1 TeV (see figure 5).

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 7/25
Figure 1. Top: Illustration of a balanced configuration of CTA South. In this example with three large, 18 mid‐size, and 56 small telescopes (see 3.1). The telescope positions are in units of meters. The effective area of CTA may extend slightly beyond the area actually covered by telescopes (resulting in about 0.1 km2 in the energy range only available to the large telescopes, close to than 1 km2 in the energy range of mid‐size telescopes and about 5 km2 in the energy range of the small telescopes, not counting for γ‐rays lost in the gamma‐hadron discrimination). Bottom: Illustration of a possible configuration for a Northern CTA array with emphasis on the low energy band, here consisting of 4 large and 17 mid‐size telescopes.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 8/25
Figure 2 Integral sensitivity of the balanced CTA configuration (see figure 1 top) as a function of energy. For comparison the sensitivity curves of current generation of Imaging Cherenkov experiments are drawn, as well as of the Fermi LAT.
Figure 3 Differential sensitivity of the same CTA configuration in 5 bins per decade of energy, for different observation times. The sensitivity is shown in 'Crab units', assuming an E‐2.57 power law spectrum matching the Crab Nebula at TeV energies. The black lines are parameterizations of the best performance of any tested configuration. The balanced configuration is thus close to optimal at all energies and for all observation times, even though other configurations may be slightly superior at specific energies.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 9/25
Figure 4: Angular resolution of the balanced CTA configuration as a function, showing both the 68% and 80% containment radius under different cut optimizations resulting in best sensitivity or in best angular resolution.
Figure 5 Energy resolution (r.m.s.) of the balanced CTA configuration as a function of energy, again for different cut optimizations.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 10/25
3. Phys ica l Requirements
3.1. Requirement of more than one telescope type
At the lowest energies large telescopes are required to focus as many of the few Cherenkov photons as possible into a camera. These are very expensive and their effective areas are limited by the characteristics of the Cherenkov emission in air. In addition, the detector dynamic range is limited to a few thousand photo‐electrons per pixel (PMT). Some pixels will thus saturate at high energies. Smaller telescopes will not be able to see the lowest energy showers but will be more cost‐effective for the detection of the higher energy showers. A single type of telescopes may reasonably cover an energy range of a factor of a few hundred between threshold and saturation. Coverage of the CTA energy range with only two types of telescopes would just barely be possible, leaving basically no overlap in the individual ranges and thus resulting in poor cross‐calibration. A two‐type configuration would also result in non‐optimal performance in the core energy range because the large telescopes would be in saturation and cover a too small effective area while the small telescopes would not yet detect the showers with good quality. The optimal design of CTA thus requires three types of telescope, with the middle size (MST: mid‐size telescope) matching the core energy range of the imaging atmospheric Cherenkov technique. Large and small telescopes (LST: large‐size telescope, SST: small‐size telescope) can then be built to have a comfortable overlap in individual energy ranges with the mid‐size telescopes (up to about a TeV for the large telescopes and starting at about a TeV for the small telescopes). For a site emphasizing observation of distant extragalactic objects (mainly AGN), the small telescope type would not be required since γ‐rays above the energy range of the mid‐size telescopes would be lost on their way due to interactions with the cosmic infra‐red background.
3.2. Camera Field of View
Following the requirements on the field of view for gamma‐rays on the sky (section 2.3), the field of view required for the cameras of the different telescopes can be derived: LST: Images of ̣gamma‐ray showers must be fully contained in the camera field of view as long as a telescope is in the light pool of the shower (image c.o.g. up to 0.9° offset plus ~0.5° length). The camera f.o.v. must thus be larger than the gamma‐ray f.o.v. Having more than the bare minimum f.o.v. will result in a more uniform response over the gamma‐ray f.o.v. and reduce any systematic errors in the background subtraction. A camera f.o.v. diameter of ~ 4.2o ‐ 5.0o is required. MST and SST: For MSTs, with inter‐telescope spacing not much exceeding the light‐pool radius, resulting camera f.o.v. diameters of 6°‐8° are optimal. For SSTs using large inter‐telescope spacings to extend the area coverage, the same gamma‐ray f.o.v. corresponds to optimal camera f.o.v. diameters of 7°‐10°.
3.3. Preliminary Definition of Telescopes
Experience with past Cherenkov telescope installations and detailed Monte Carlo simulations indicate that the desired performance for a full CTA array can achieved with a combination of three sizes of telescopes, as indicated below:
3.3.1 LST: large‐size telescope
Mirror collection area: ~400 m2 Angular pixel pitch: ~ 0.1o Camera FoV: ~ 4.2
o ‐ 5.0
o

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 11/25
3.3.2 MST: mid‐size telescope
Mirror collection area: ~100 m2 Angular pixel pitch: ~ 0.18o Camera FoV: ~ 7o ‐ 8o
3.3.3 SST: small‐size telescope, variant 1 (Davies Cotton optics)
Mirror collection area: ~10‐40 m2 Angular pixel pitch: ~ 0.25o Camera FoV: ~ 7o ‐ 10o
3.3.4 SST: small‐size telescope, variant 2 (secondary optics)
Mirror collection area: ~10 m2
Angular pixel pitch: ~ 0.2o Camera FoV: ~ 7o ‐ 10o
3.4. Layout
Due to the forward direction of Cherenkov light emission in air and the resulting Cherenkov light pool of fairly uniform illumination of about 200‐250 m diameter, inter‐telescope spacings of about 100 m are needed at the threshold, subject to optimization. Well above threshold, showers can be detected from outside the light pool, if the field of view is large enough. For an instrument consisting of several telescope type, the few (3‐5) large telescopes (LSTs) will be placed in the center of the array. The more numerous (15‐25) mid‐size telescopes (MSTs) will cover a larger area, again starting with inter‐telescope spacings of the order of 100 m in the inner region. These spacings may increase towards the edge of the MST part. The Northern CTA installation may consist of only the LST and MST parts since most sources unique to CTA‐North will be of extragalactic nature and no photons beyond tens of TeV may reach us. The Southern installation, with the inner Galaxy also in its view, will in addition also have many (25‐100) small telescopes (SSTs) covering an even larger area, with inter‐telescope spacings from about 150 to 250 m. A few SSTs in the inner region covered by LSTs and MSTs can avoid gaps in area coverage at the highest energies – where LST and MST cameras are in saturation – and aid the sub‐system cross‐calibration. CTA‐South: 3‐5 LSTs, 15‐25 MSTs, 25‐100 SSTs (see figure 1, top). CTA‐North: 3‐5 LSTs, about 15 MSTs (see figure 1, bottom).
3.5. Energy ranges covered by telescope types
Description: Section 2.2 defines the required overall energy range of the CTA instrument, from about 20 GeV (for variable sources) or about 70 GeV (for steady sources) up to about 300 TeV. The lower limit, with overlap to space‐based instruments (Fermi) is covered by the LST. The upper limit of this range also defines the upper limit to the SST sub‐system. The overlap of the LST sub‐system with the MST sub‐system is required for at least two purposes: The LST telescopes need to be able to measure gamma‐ray showers up to at least 1 TeV for cross calibration with the MSTs. For independent operation of the LST sub‐array, showers should not saturate the cameras up to energies, where the sensitivity of the sub‐array is limited by signal statistics (at least 10 detected gamma‐rays). See reference [RD2]

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 12/25
In addition, overlap in energy ranges between MSTs and both LSTs as well as SSTs are required for reasons of cross‐calibration. Specification: 20 GeV to 300 TeV, split up as 0.02 – 5 TeV (LST), 0.1 – 30 TeV (MST), <1 – 300 TeV (SST) Implications on cost: Reduction of the lower limit would require larger telescopes and more of them, with more accurate control of background systematics (implying a larger camera field of view etc.). Extending the upper limit would require coverage of a substantially larger area with instruments sensitive to very bright showers. A larger overlap between the different telescope types would require an increased dynamic range of the cameras.
3.6. Array Trigger
The concept of CTA is based on the stereoscopic detection of air showers. Therefore it is advisable to combine the information of the different telescopes already online, and to acquire event data only for further processing, if certain, configurable inter‐telescope trigger conditions are fulfilled [RD3, RD4, RD5]. This helps to suppress background, to reduce system dead time and to increase the sensitivity of a telescope system. The CTA arrays therefore should be equipped with configurable array trigger systems.
3.7. Data Acquisition
The bulk of data is generated by the cameras of the large size and medium size telescopes. The individual telescopes will generate pre‐array trigger about 50‐100 Byte of raw data per pixel and event, resulting in a raw data flow of the order of up to a GByte/sec per telescope. For a balanced Southern array (figure 1 top) the expected rate of detected air showers after array trigger will be of the order of 15‐20 kHz, with an average telescope multiplicity of 5‐6. For these events, the recorded waveforms of the pixels will be analysed and all calibration steps performed, resulting in pixel intensity values and possibly pulse arrival time values per pixel. In this processing step, the amount of data will be reduced by more than two orders of magnitude from about 50 GByte/sec to a few hundred MByte/sec of calibrated camera images, ready for stereoscopic event reconstruction. Detailed values derived from simulations can be found in the report of the WP MC trigger sub‐task group [RD6] The CTA data acquisition system has to provide the corresponding data transmission bandwidth and processing power, to allow for an online analysis including all pre‐processing and calibrations steps of the recorded events.
3.8. System Dead Time during Observations
During normal data taking for observations, it is possible that telescopes can’t process events, because either the camera readout or the data pipeline is busy with previous event(s). This generates dead time of the instrument, which leads to a reduced sensitivity of the system. Therefore, the dead time of individual telescopes during observations at normal operating conditions should be less than 5 %. In addition, the probability that at least one telescope is busy in an event should be less than 10 %. A second source of dead time during observation sequences can be delays in the response of the data acquisition and slow control software, e.g. between individual observation runs, preventing the telescopes from taking data and resulting in a loss of possible observation time. The intrinsic response time of these processes should be reduced to less than 10 sec.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 13/25
3.9. Data Products
The telescope cameras should provide per pixel a measurement of the light intensity and possibly a measurement for the arrival time of the light pulses in the pixels. For the reconstruction of the events, additional calibration data will be required, like the optical efficiency of the telescopes, the light sensitivity of the individual pixels, the pointing of the telescopes in the sky. The corresponding calibration methods and devices have to be foreseen.
3.10. Accuracy of the Energy Scale
The measurement of flux and energies of gamma‐ray is related to the amount of Cherenkov light emitted by the atmospheric showers. The camera instrumentation provides electric signals that are related to emitted photons by taking into account the electronics properties (e.g. amplification) and the efficiencies of all optical components (e.g. atmosphere, telescopes, camera) . The relationship between the number of emitted photons and the measured signal is determined by the calibration process. It takes into account the atmospheric absorption (measured, e.g. using LIDARs), the global optical efficiency of the telescope (mirrors, structure and camera shadowing) and of the camera (entrance window, photo sensors) and its electronics properties (pedestal, amplification, linearity). Beyond the intrinsic limitation of the Atmospheric Cherenkov technique, the accuracy of calibration directly translates into the accuracy of the energy scale. Specification: <10% To achieve this accuracy, continuous atmospheric measurements are required on each observatory site. In addition each telescope should have a specific instrumentation to measure the telescope efficiency. In general, the largest inaccuracy is coming from the atmosphere properties.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 14/25
4. Operat ing Condit ions
4.1. Light Levels
A telescope is exposed in a dark night to a) a persistent background light level from the night sky and b) short pulses of Cherenkov light.
4.1.1 Background Light Level
Background light is due to star light, zodiacal light, air glow, scattered sun light, moon light and man‐made light pollution. In a dark site (little light pollution) at mountain‐level altitudes and under conditions of astronomical darkness, it is about corresponding to one magnitude 22 star per square arc second or some 200 magnitude 10 stars per square degree in the V (green) wavelength band, increasing substantially in energy flux from the UV to the green and red wavelength region [RD7]. Since Cherenkov light is most intense in the blue and UV region, photo sensors should provide as little sensitivity as possible in the green and, in particular, the red region. They should be completely insensitive to IR wavelengths. In a typical Cherenkov telescope of 100 m² mirror collection area and photon detectors as foreseen for an MST, this background light level will result in background photo‐electron rates in excess of 100 MHz per pixel, even for a very dark region of the sky. For a typical region in the Galactic plane, a level of twice that is common, with considerable spread. In observations while the moon is up, a level of five times that of dark sky is easily exceeded, depending on the phase and distance of the moon, the angle between telescope viewing direction and the moon etc. Observations under high light levels may increase the aging of the photo detectors. Even under dark conditions, the afterpulsing of photo‐multiplier tubes from background light may limit the energy threshold and low‐energy sensitivity of Cherenkov telescopes.
4.1.2 Signal Light Level
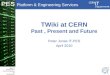
The Cherenkov light of a 100 GeV gamma‐ray shower has a typical and fairly uniform density of some 10 photons/m² on ground (in the wavelength range 300 to 600 nm) within about 120 m from the shower core (see figure 6). This region around the shower core is referred to as the light pool. Beyond that the light density falls with radius R roughly like 1/R². The average central density depends also on the altitude of the site and the atmospheric profile, mainly due to different distance of the shower maximum to the site. At increasing energies E it rises for gamma‐rays a bit more rapidly than proportional to E, due to increasing shower penetration into the atmosphere. Proton showers are rather similar at TeV energies but are far less efficient than gamma‐rays (or electrons) at low energies. A typical telescope of 100 m² mirror collection will get some 1000 photons reflected to its camera from a 100 GeV shower and about 5 million photons from a 100 TeV shower. Depending on the photon detectors, this may result in close to 100 photo‐electrons at the 100 GeV detection level, of which about half may be detected in a handful of pixels, the remaining photo‐electrons being more spread out. For telescopes inside the light pool, most of the Cherenkov light will arrive within a few nanoseconds. Far outside of the light pool, arrival times may be spread out over tens of nanoseconds, due to geometrical reasons. In either case, the signal in each pixel can be rather short, with a typical r.m.s. width of 0.7 ns due to photon arrival times – slightly narrower at the rim of the light pool but generally wider both inside and outside (see figure 7). Typical PMTs will add a similar spread due to their transit time spread, and the reflector, if optimized for point‐spread function rather than time spread, may add again a similar or even larger time spread. At the detection level, the pixels may thus see about 5 to 10 photo‐electrons, most of them within about 2‐3 nanoseconds (FWHM). At energies of a thousand times higher than the detection energy threshold, the most intense pixels may have to deal with some pulses of 50 000 photo‐electrons, a level easily exceeding the dynamic range of photon detectors and electronics.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 15/25
Figure 6: Lateral distribution of Cherenkov light density (in the 300‐600 nm wavelength range) on ground for simulated gamma‐ray showers (left) and proton showers (right).

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 16/25
4.2. Definition of Operating Modes
4.2.1 Normal Operation
The telescopes can be used for regular observations or be moved for maintenance. All deformations and the optical PSF have to be maintained within the limits for regular observations. All drive systems need to be operational at full speed and acceleration. The camera can be switched on and the lid opened (if in addition darkness criteria fulfilled).
4.2.2 Critical Situation
Observations / maintenance have to be stopped and the telescopes need to be moved to the safe position. No non‐reversible deformations / damage may occur. All drive systems need to be operational at least at 70% of the full speed and of the full acceleration. The camera needs to be switched off and the lid closed.
4.2.3 Emergency Conditions
In case the environmental conditions exceed the thresholds defining the emergency situation, the telescopes still need to be moveable to the safe position. No non‐reversible deformations / damage may occur. All drive systems need to be operational at least at 10% of the full speed and of the full acceleration. The camera needs to be switched off and the lid closed.
Figure 7: Distribution of photon arrival times on ground from simulated vertical gamma-ray showers in different ranges of core distance. In the absence of a time gradient along a shower image(around 120 m core distance), this is also the time distribution in a single pixel, for an idealtelescope and photo-detector. Time zero corresponds to when the primary gamma-ray would have arrived on ground, in case of no interactions.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 17/25
4.2.4 Survival Conditions
The telescopes need to be in the safe position. No non‐reversible deformations or damage may occur to the telescopes. The telescopes do not need to be movable. The camera needs to be switched off and the lid closed.
4.3. Environmental Conditions
The environmental conditions described herein are not specifications for the CTA site, and are not intended as a complete description of the environment on site. They rather represent the current best knowledge of an expected site, and should therefore be treated as the site parameters relevant for the design of the telescopes.
4.3.1 Altitude
Description: The operational altitude is the altitude at which the telescopes will be required to be operational. Specification: Operational altitude 1500 to 3800 metres above mean sea level. Justification: The geographical location of the CTA telescopes has not been identified yet, however site candidates have been identified at altitudes ranging from 1500 metres to 3800 metres above sea level. Qualification: The ambient air pressure and density is reduced as a function of site altitude. Items of electrical or mechanical equipment that are designed to operate at sea level (atmospheric pressure 101325 Pa) should be de‐rated for operation at the site altitude. Ultraviolet radiation also increases with altitude due to decreasing atmosphere thickness, ozone, cloud cover and aerosols. Impact on Performance: Cooling efficiency of items such as motors and fans will be impaired, hence these must be oversized for operation at altitude. As a general guideline ultraviolet solar radiation increases by approximately 10 % for every 1000 metres increase in altitude (estimated by the World Health Organisation). Materials such as thermoplastics and polymers are particularly susceptible to photodegradation due to ultraviolet exposure and increased UV levels can cause embrittlement and loss of extensibility, tensile strength and impact resistance. Impact on Cost: The requirement to de‐rate equipment for operation at elevated altitudes and specify ultraviolet resistant materials can substantially increase component and array capital cost. For example the use of ultraviolet resistant PTFE pneumatic airlines in lieu of nylon can increase costs by a factor of five.
4.3.2 Operational Temperature Range
Description: The normal operational temperature range is defined as the bound formed by the upper and lower temperature limits for which the telescope will be required to conduct normal operations. The emergency operational temperature range is defined as the bound formed by the upper and lower temperature limits for which the telescope must be capable of being operated such that it may be either restored to its normal operating condition or be placed in a stowed position. The survival operational temperature range is defined as the bound formed by the upper and lower temperature limits which the telescope must be capable of withstanding without suffering permanent damage. Specification:
Parameter Minimum Value Maximum Value
Normal Operating Temperature ‐10 Celsius +30 Celsius
Emergency Operating Temperature ‐15 Celsius +45 Celsius
Survival Operating Temperature ‐25 Celsius +60 Celsius

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 18/25
Justification: The operating temperature ranges must incorporate both diurnal and annual temperature extrema for the candidate or actual site location accounting for both air temperature and gains from solar radiation. Qualification: Diurnal and annual air temperature extrema may be obtained from local or national meteorological data. Surface temperatures due to solar radiation may be estimated by calculation of the equilibrium temperature derived from incident solar radiation heat flux. Impact on Performance: Differential thermal expansion may cause structural damage, binding of moving parts, induce high strains in optical components, cause unstable operation or failure of electronic components due to high thermal gradients and degradation of polymers and composite materials resulting in a shortened operational lifetime. Impact on Cost: Athermalisation of the structure may require the use of materials having low coefficients of thermal expansion, e.g. austenitic stainless steels, invar alloys or composite materials. Use of these can significantly increase cost. Impact on Other Specifications: The structural properties of many commonly used engineering materials such as ferrous and non ferrous metals, polymers and composites vary widely with operating temperature. Variations of mechanical properties such as the Young’s modulus, fracture toughness, fatigue resistance, stress‐strain behavior and thermal expansion coefficients must be considered.
4.3.3 Wind Speed and Power Spectral Density
Description: The normal operational wind speed is defined as the wind speed at which normal telescope operation is possible. The critical operational wind speed is defined as the wind speed at which normal telescope operation shall cease and the telescope be moved at normal slew speed to its safe stow position. The emergency operational wind speed is defined as the wind speed at which the telescope must be immediately moved to its safe stow position. The maximum survival wind speed is defined as the maximum wind speed that the telescope will sustain without suffering permanent damage that would prevent immediate resumption of normal telescope operation. The wind power spectral density is defined as a function of mean wind velocity and frequency. Specification:
Parameter Value
Normal Operational Wind Speed Equal to or less than 50 km/hr
Critical Operational Wind Speed Exceeding 50 km/hr but less than 65 km/hr
Emergency Operational Wind Speed Exceeding 65 km/hr but less than 100 km/hr
Maximum Survival Wind Speed Equal to 200 km/hr
Nomenclature: km/hr = Kilometres per hour The wind power spectral density may be calculated either as a Von Karman Power Spectrum or by using an empirically based (Davenport) model. Justification: It is anticipated that static and dynamic wind loads will render normal telescope operation difficult at wind speeds exceeding 50 kilometres per hour. For wind speeds in excess of 50 kilometres per hour the telescope should be moved to the safe stow position. For the survival condition of 200 kilometres per hour the telescope should be locked in the stow position. Qualification: Wind speed magnitudes and power spectra are dependent upon environmental conditions at the telescope geographical location. Therefore site specific wind speed and power spectrum data must be obtained from local or national meteorological institutes.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 19/25
Impact on Performance: The operational wind speed will directly impact upon the operational slew torque and the telescope pointing and tracking ability. The critical and emergency wind speeds will impact upon the slew torques required to drive the telescope to the safe stow position, the survival wind speed will dictate the magnitude of the static and dynamic wind loads that must be resisted by the telescope and the magnitude of the overturning moments that must be resisted by the foundation. Impact on Cost: The operational, critical and survival wind speeds will dictate the required drive torques and electrical power requirements and hence their capital and running costs. It is important to consider overall electrical power requirements for the array as the required infrastructure will incur a significant capital cost and operational power requirements will be a significant fraction of the annual running costs. The maximum survival wind speed will dictate the foundation and structure design and cost. Impact on Other Specifications: The maximum survival wind speed will directly impact upon the foundation specification, design and cost. Anchoring methods for the telescopes such as rock bolting or the use of a gravity base must be designed so as to withstand the survival wind speed.
4.3.4 Seismic Activity
Description: Seismic activity is defined as the magnitudes of horizontal and vertical accelerations that the telescope must withstand during normal operation. The operational base earthquake is defined as the maximum earthquake level that the telescope must withstand without suffering damage that would prevent quickly resuming normal operation. The maximum likely earthquake is defined as the maximum earthquake level that the telescope will withstand without suffering such severe damage that it proves uneconomic to resume use of the telescope. Specification: The magnitudes of peak horizontal and vertical accelerations are site specific and must be obtained from local construction design codes or from national geophysical institutes. However as an example assuming South America as the telescope site the operational base earthquake horizontal acceleration magnitude will be specified to be 0.25 G and the maximum likely earthquake horizontal acceleration magnitude will be specified to be 0.34 G. The vertical acceleration in both cases will be assumed to be equal to 0.67 times the horizontal acceleration magnitude, with both the horizontal and vertical accelerations being applied simultaneously. Justification: Seismic maps indicating global peak ground acceleration magnitudes are available from GSHAP (Global Seismic Hazard Assessment Programme). The resistance of the telescope structure and foundation to seismic damage will typically be evaluated by specifying the magnitude of the operational base earthquake (OBE) and the maximum likely earthquake (MLE) in terms of acceleration amplitudes. These can vary considerably depending upon the site location. For example for South America the maximum likely earthquake (MLE) horizontal acceleration magnitude may be 0.34 G and the operational base earthquake (MBE) horizontal acceleration magnitude may be 0.25 G, whereas for West Africa these may be 0.08 G and 0.05 G respectively. Due to the potential for facility damage due to under specification or of incurring additional construction costs due to over specification it is extremely important that site specific acceleration magnitudes are obtained and adopted in the design. Qualification: General rules for the design of structures for seismic activity that may assist the designer when evaluating the resistance of the telescope structure to seismic activity will be given in local construction design codes. As an example within Europe the following design codes that may be relevant are Eurocode 8: Design of structures for earthquake resistance, Part 1: General rules seismic actions and rules for buildings, Part 5: Foundations, retaining structures and geotechnical aspects and Part 6: Towers, masts and chimneys. Impact on Cost: Foundation and structure cost may be considerably affected by the seismic acceleration magnitudes. Impact on Other Specifications: Acceleration of the telescope as a result of seismic activity will impose large overturning moments upon the foundation. Anchoring methods such as rock bolting or the use of a gravity base must be designed to withstand these.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 20/25
4.3.5 Lightning
Description: A lightning protection system must be installed consisting of air termination points, down conductors, test points and earthing points. Specification: The lightning protection system must be designed in accordance with national standards, for example in the United Kingdom the relevant standard being BS 62305 (Protection against Lightning). Specification of the lightning protection system and modes of telescope operation during weather conditions likely to result in occurrences of lightning will be provided in the additional safety documentation for the telescope. Impact on Cost: The requirement to provide a lightning protection system for the telescopes within the array is anticipated to be a significant capital cost.
4.3.6 Precipitation (rain)
Description: This is defined as the rainfall rate and velocity. Specification: For normal telescope operation the rainfall rate is specified to be zero. For the critical, emergency and survival conditions the rainfall rate and velocity must be derived from rainfall data obtained from local or national meteorological institutes. Justification: Rainfall rate and velocity is expected to be highly dependent upon local climatic conditions, hence local site specific rainfall data must be applied. Water tightness of enclosures containing critical electrical items must be specified by an ingress protection rating. Impact on Performance: Pooling or accumulation of rainwater upon or within the telescope may cause intermittent operation or failure of electrical items and increase the static loads imposed upon the telescope. Accumulation of rainwater within hollow members such as telescope truss tubes or mount will increase drive torques and power requirements and decrease slew rates. Accumulation of trapped or standing water will lead to corrosion and may also lead to structural damage as a result of ice formation at low temperatures. Impact on Cost: Specification of enclosures, cabling and electrical connectors that will be resistant to water ingress will incur additional cost.
4.3.7 Snow and Ice
Description: Site specific snow and ice loads should be applied to the telescope structure in order to evaluate the resistance of the telescope structure to accumulated snow or freezing precipitation. Specification: Site specific snow loads and ice accretion data must be obtained from national or regional specific snow load maps. Justification: It is suggested that reference be made to national standards, e.g. ASCE 7‐10 Snow Loads (United States), Eurocode 1 Actions on Structures Part 1‐3 General Actions Snow Loads (Europe) or to the relevant national standards for the country concerned. Impact on Performance: Ice accretion or snow accumulation on the telescope will increase static loads upon the telescope due to self weight and increase static and dynamic loads due to wind resistance. These in turn will affect pointing and tracking ability and increase slew torques and drive power requirements and increase the total power requirements for the telescope array. Impact on Cost: Snow or ice accumulation will impose increased static and dynamic loads upon the telescope, the telescope structure must be designed to withstand these at a consequent increase in cost.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 21/25
Impact on Other Specifications: Snow and ice loads will also increase static loads upon any telescope enclosure that may be specified.
4.3.8 Humidity
Description: The normal operational humidity range is defined as the bound formed by the upper and lower humidity limits for which the telescope will be required to conduct normal operations. The dew point indicates the temperature at which water vapour will condense from the local air mass to form liquid water. The critical and emergency operational humidity ranges are defined as the bounds formed by the upper and lower humidity limits for which the telescope must be capable of being operated such that it may be either restored to its normal operating condition or be placed in a stowed position. The survival humidity range is defined as the bound formed by the upper and lower humidity limits which the telescope must be capable of withstanding without suffering permanent damage. Specification:
Parameter Minimum Value Maximum Value
Normal Operating Relative Humidity 5 Percent 95 Percent
Critical Operating Relative Humidity 0 Percent 100 Percent
Emergency Operating Relative Humidity 0 Percent 100 Percent
Survival Relative Humidity 0 Percent 100 Percent
Justification: The operating humidity ranges must incorporate both diurnal and annual humidity extrema for the candidate or actual site location. Local meteorological data must be consulted so as to assess the potential for dew forming conditions to occur that may prevent normal operation of the telescope due to degraded image quality. Impact on Performance: Low relative humidity can cause degradation of polymeric or rubber based compounds such as seals, couplings or drive belts and increase the possibility of electrostatic discharge, high relative humidity can cause condensation within enclosed spaces such as electrical enclosures. Should the dew point fall below the ambient temperature condensation may form on optical components and metallic surfaces and the optical image quality be adversely affected. Dewing of optical surfaces may be mitigated by use of anti dew heating elements embedded into the optics but these will considerably increase optical element complexity and electrical power requirements. Impact on Cost: Dew forming on optical surfaces may necessitate the inclusion of anti dew heaters into the optics, considerably increasing optic component costs and array operational costs.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 22/25
5. L i fecyc le , Maintenance
5.1. Reliability, Availability
Description: This is the overall reliability of the array. It includes maintenance of the structures and cameras. More detailed items, such as the reliability of a given telescope size and the pixel failure rate, are specified in Level B and Level C respectively. Specification: 80% of the telescopes must be operational in at least 90% of the time and 90% of the telescopes must be operational in at least 80% of the time. Justification: Assuming the array consist of 100 telescopes, it is (very) reasonable that no more than 10 are non‐operational at one time for a total of 10 weeks, and that no more than 20 of them are non‐operational at one time for a total of 5 weeks. This does not preclude the possibility that all the telescopes are non‐operational for a night or so, or that one or two telescopes could be broken for the entire year (not the same one or two telescopes!). Qualification: This is a safe goal. It should be possible to exceed this goal with the specified maintenance level ( 5.2) given a reasonable design. Impact on Performance: Improving the reliability of the array implies that more telescopes are operational at a given time, increasing the collection area, and sensitivity of the array. If the number of telescopes imaging a given event is consistently higher, the angular resolution will be improved. If the reliability of a given sub‐system falls below this specification, the energy range of the array could be affected. Reduced reliability also leads to increased systematic errors on the system performance. Impact on Cost: The running costs, used in part to fund maintenance are not included in the cost envelope. It is therefore tempting to reduce the cost of components at the price of poor reliability and higher maintenance / lower reliability to achieve the highest performance in the cost envelope. This should clearly be avoided. It is also expected that the cost of many replacement parts and components would be purchased upfront to avoid availability issues later on. Estimates must be made of the cost of maintaining the above‐specified reliability for a give design. It must also be assessed that if a given design exceeds this specification, whether it is better to reduce the running costs until the failure rate drops to the specified value, or to maintain the running costs and benefit from the improved performance. Impact on Other Specifications: The required reliability should be taken into account in specifying the desired reliability of sub‐systems and assemblies. The reliability also affects the required level of maintenance (as specified in 5.2) and the lifetime of the array ( 5.3).
5.2. Maintenance
Description: The level of maintenance available to sustain the reliability (as specified in 5.1) for the lifetime of the array (as specified in 5.3). Specification: No greater than 6 person hours per telescope per week in average. Justification: This equates to 15 full time people, assuming 100 telescopes are to be maintained, and implies that about 6 people could access, repair and re‐commission a telescope in less than one working week (40 hours). Qualification: This specification is in place to indicate the importance of considering maintenance levels. Real assessment of the maintenance level should be made during the design stage, and attempts to minimise them should be made.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 23/25
Impact on Performance: If the maintenance level increases the reliability of the array could be improved, thereby affecting the performance as indicated in 5.3.1. Naturally, if the maintenance level is not enough to sustain the specified reliability, the performance is reduced in a similar way. Impact on Cost: The cost of maintenance scales with the number of people employed to maintain the telescopes and the training of such personnel. There is a cost increase associated with maintenance equipment, workshop and office space that may increase non‐linearly, when the number of “repair teams” increases. Note that running costs, and therefore maintenance cost, are not included in the cost envelope. Impact on Other Specifications: The available level of maintenance should be taken into account in specifying the desired reliability of sub‐systems and assemblies.
5.3. Life Time
Description: The expected operational lifetime of the array, defined by the point at which the array exceeds the maintenance reliability specified in 5.1. This lifetime excludes major upgrades and the replacement of full telescopes or cameras. That it, this lifetime should be obtainable under normal maintenance schedule (to be specified in proceeding levels) with the original set of telescopes. Specification: 30 years. Justification: To estimate a reasonable lifetime to be aimed at, the most critical components that will not be completely replaced over that lifetime must be identified. If this component is the PMTs, then 30000 hours corresponds to 30 years assuming 1000 hours of non‐moonlight observations per year, or ~15 years if we assume 1000 hours of non‐moonlight observations and 500 hours of moonlight observations per year. This exercise should be repeated for mirrors and other components. The second critical contribution to the lifetime of CTA is expected to be fatigue in the telescopes. For normal operation it is expected that three slewing motions of the telescope may be made in a one hour period, therefore the fatigue life of the telescopes and their assemblies must be evaluated for a minimum of 150000 slew operations. Each slew operation is defined as an acceleration of the telescope from rest to its maximum slew speed, motion at constant velocity at maximum slew speed and a deceleration of the telescope from the maximum slew speed to rest. The acceleration and deceleration magnitudes may be derived from the slew rate. Fatigue damage may be assessed by applying the maximum acceleration amplitudes to calculate maximum strain or stress amplitudes and then applying a damage summation technique such as Miners Rule to evaluate the resistance of the telescope structure to fatigue. In addition it is possible that the natural frequencies of structural members such as truss tubes could coincide with vortex shedding frequencies over the operational wind speed range. Therefore in order to avoid wind induced excitation of resonant modes of items such as the truss tubes in the optical tube assembly, it is suggested that the natural frequencies of items such as truss tubes are checked against vortex shedding frequencies obtained by calculation of the Strouhal number. Qualification: This is an order of magnitude that should be aimed at. It is somewhere between a specification and an estimate based on current hardware. It is clearly desirable to exceed this specification. Impact on Performance: The total exposure available to CTA obviously depends on the lifetime of the array. However, none of the performance criteria directly depend on the array lifetime. Designs may be available that offer increased lifetimes at the price of decreased performance within the cost envelope. Impact on Cost: It may be possible to increase the lifetime of the array by spending more money on given sub‐systems, assemblies and components. The cost ratio between different sub‐systems, assemblies and components should take this into account.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 24/25
Impact on Other Specifications: The lifetime of the array is affected by the specified reliability of the array. If the reliability constraint is loosened, the defined lifetime increases. The lifetime of each component and even part should be considered at the design stage. At the lower specification levels the lifetime of sub‐systems and assemblies should be considered in the context of that specified here, to give a clear idea at the design stage of lifetime‐critical assemblies and components.
5.4. Safety
Safety specifications and procedures will be contained in another document. Every component specified in the set of requirement documents (Level B and below) must conform to these safety specification.

CTA Ref : TPC‐SPECS/110331a CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level A: Preliminary CTA System
Performance Requirements Page : 25/25

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 1/12
Level B: Preliminary CTA Sub‐System Performance Requirements
Author Laboratory Approved by Laboratory
Konrad Bernlöhr (konrad.bernloehr@mpi‐hd.mpg.de)
Oscar Blanch Bigas ([email protected])
Rodolfo Canestrari ([email protected])
Carlos Delgado ([email protected])
Andreas Förster (andreas.foerster@mpi‐hd.mpg.de)
German Hermann
(german.hermann@mpi‐hd.mpg.de)
Jim Hinton ([email protected])
Bruno Khélifi ([email protected])
Pascal Vincent ([email protected])
Richard White ([email protected])
plus members of the CTA Design Study Work Packages
German Hermann (Technical Coordinator),
March 31st, 2011
Project Committee, June 7, 2011
Applicable Documents
No. Version Ref. Date Title 1 1.0 TPC‐
SPECS/110331c 2011‐06‐07 Reference Documents for Preliminary CTA Performance
Requirements Level A and B
History
Edition Date Observation 0.0 2011‐03‐31 New document
1.0 2011‐06‐07 Added plot and refined wording in sec. 4.8 « signal charge resolution »
Distribution CTA internal

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 2/12
‐ Table of Contents ‐
1. INTRODUCTION 3
2. SUB‐SYSTEM FUNCTIONALITY 3
2.1. LST 3 2.2. MST 3 2.3. SST 3
3. TELESCOPE REQUIREMENTS 4
3.1. MOUNT TYPE 4 3.2. PRIMARY REFLECTOR DIAMETER 4 3.3. OPTICAL POINT SPREAD FUNCTION 4 3.4. FOCAL LENGTH, DISH SHAPE 4 3.5. TELESCOPE POSITIONING AND TRACKING RANGE 5
3.5.1 Positioning Range During Observation 5 3.5.2 Positioning Range During Technical Tests 5 3.5.3 Positioning Range During Stow / Service 5 3.5.4 Tracking Range and Tracking Speed 5
3.6. SLEW SPEED 5 3.7. AXIS TRACKING PRECISION 6 3.8. FOCAL PLANE POSITIONING 6 3.9. POINTING PRECISION POST‐CALIBRATION 6 3.10. OPTICAL THROUGHPUT 6
4. CAMERA REQUIREMENTS 7
4.1. CAMERA FIELD OF VIEW 7 4.2. PIXEL SIZE 7 4.3. CAMERA WEIGHT 8 4.4. ENVIRONMENTAL CONTROL 8 4.5. PIXEL SIGNAL DYNAMIC RANGE 8 4.6. CAMERA PHOTON DETECTION EFFICIENCY 8 4.7. CAMERA HOMOGENEITY 8 4.8. SIGNAL CHARGE RESOLUTION 9 4.9. SIGNAL TIME RESOLUTION 10 4.10. MINIMUM GAMMA‐RAY IMAGE AMPLITUDE 11 4.11. CAMERA DEAD TIME 11 4.12. ALLOWED TRIGGER RATE DUE TO NIGHT SKY BACKGROUND 11 4.13. TRIGGER AND READOUT RATE TO HANDLE 11
5. ARRAY TRIGGER 12

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 3/12
1. Introduct ion
This Level B document captures performance requirements for the LST, MST and SST sub‐systems of CTA. The “Common Sub‐system Requirements” described here are those specifications applicable to all three telescope subsystems.
2. Sub ‐system Funct ional i ty
2.1. LST
The LSTs sub‐system provides: A) Sensitivity in the 20‐100 GeV domain (and improved sensitivity up to ~200 GeV) when working together with the MSTs [RD2]. Above 200 GeV, the larger number of MST will significantly overpass the contribution from the LST. B) An independent system with sensitivity in the 20 GeV ‐ 5 TeV domain for rapid response to transient phenomena and variable objects at cosmological distances.
2.2. MST
The MST sub‐system provides: A) Substantially improved sensitivity and resolution in the 0.1‐10 TeV domain when working together with the SST and/or LST sub‐arrays [RD2]. B) An independent system with 0.1‐30 TeV sensitivity to extended objects and with wide FoV for survey capability.
2.3. SST
The SST sub‐system provides: A) Multi square kilometer collection area at energies above 10 TeV, with sensitivity up to at least 300 TeV and trigger threshold not greater than 1 TeV when working alone and with wide FoV for survey capability [RD2]. B) A cost effective way of improving collection area and sensitivity above ~ 1 TeV, working together with the MST array

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 4/12
3. Telescope Requirements
3.1. Mount Type
All telescopes should use Alt‐Azimuth mount (see [RD8]). Deviation from this standard may add unnecessary complications to the control and positioning systems, and can only be justified through significant cost advantages over the full life cycle.
3.2. Primary Reflector Diameter
The collection areas given below are for a system with nominal mirror reflectivity, shadowing and photon detection efficiency (see [RD1] for a full description of the reference system parameters as introduced in Level A Section 3.1). The telescopes of each sub‐system should result in an equivalent light‐collection power. LST: The requirement of about 400 m2 collection area corresponds to a dish diameter of approximately 23 m. MST: The requirement of about 100 m2 collection area corresponds to a dish diameter of approximately 12 m. SST: The requirement of a about 10‐40 m2 collection area corresponds to a dish diameter of greater than 3.5 m and less then 7 m.
3.3. Optical Point Spread Function
The optical performance of a telescope can be expressed in terms of the 80% containment diameter of the optical point‐spread‐function (PSF), θ80, which will vary as a function of position in the field of view. To avoid significant degradation of sensitivity over the majority of the field of view the value of θ80 should be kept below the pixel diameter out to 80% of the camera radius. In the case that the telescope structure cost is strongly dominant and increases significantly with focal length (as is likely the case for the LSTs of CTA), it may be appropriate to violate this constraint: keeping θ80 smaller than the pixel diameter over a minimum optically high‐quality camera field of view of 2.5° diameter. This minimum optically high‐quality field of view, and the presence of detector pixels somewhat oversampling the PSF at considerably larger radii (up to at least 4.2° diameter) are considered to be the minimum requirement for effective wobble mode observations of point‐like sources. On the optical axis, θ80 should be below about 0.1° diameter over the full elevation range, used for observations. This is important for achieving the required pointing precision (see section 3.9) and to reduce systematic errors. For optical designs, where this goal cannot be achieved, alternative methods to monitor the optical alignment are required.
3.4. Focal Length, Dish Shape
Mirror systems will be segmented to reduce cost. Spherical segments are envisaged for all telescope designs apart from those involving secondary optics. Single reflector designs can be characterised by the focal length and the radius of curvature of the dish. LST: The requirement of a dish diameter of approximately 23 m and the gamma‐ray field of view described in Level A impose a minimum focal length of 28 m for an intermediate dish shape (radius of curvature of the dish = 1.5 …. 1.6 x focal length) for a minimum field of view of 4.2°. A larger focal length makes the balance and construction of the telescope more demanding but enables high quality imaging in the camera up to larger off‐axis angles. An f/D of 1.3 is appropriate for a 5° camera FoV and 0.1° pixels.

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 5/12
MST: The requirement of a dish diameter of approximately 12 m and the gamma‐ray field of view described in Level A impose a minimum focal length of 16 m for a spherical dish shape with radius of curvature 19.2 m (a compromise between time‐spread and off‐axis performance, see [RD9]). SST: Several options that meet the gamma‐ray field of view requirement described in Level A for the required dish diameter of greater than 3.5 m are under consideration.
3.5. Telescope Positioning and Tracking Range
All telescopes of all sub‐systems are required to meet the following:
3.5.1 Positioning Range During Observation
Elevation: at least 25°‐91° Azimuth: at least ±270° from parking position, depending on geographical latitude. No repositioning (no azimuth wrap‐around) during observation should be required to follow any given source. Safety considerations may imply a larger range.
3.5.2 Positioning Range During Technical Tests
Elevation: at least 25°‐95° Azimuth: as for observations
3.5.3 Positioning Range During Stow / Service
Elevation: <0° Azimuth: anti‐solar at noon. The stowing position should provide easy access to the camera. A fixation point close to ground level is recommended.
3.5.4 Tracking Range and Tracking Speed
The telescope should be able to follow any target in the observation range for earth rotation at least for zenith angles of larger than 0.5° within tracking and pointing precisions as detailed in sections 3.7 and 3.9. If feasible without major cost implications zenith angles of down to 0.1° to 0.2° should be accessible. Implications on maximum tracking speeds depend on the geographical latitude.
3.6. Slew Speed
A change in axis pointing from, and to, anywhere in the specified “Position Range During Observations” (section 0) should be possible within about 1 minute for the LST and MST telescope, and within about 2 minutes for the SST telescopes. This corresponds to a maximum required azimuth velocity of about 360° /min and 180° /min azimuth velocity, respectively, if the dish of the telescope cannot be used in “reverse” mode, with elevation angles larger 90°.

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 6/12
3.7. Axis Tracking Precision
The required precision of the orientation of the telescope axis duration source during astrophysical tracking within the “Position Range During Observations” is better than 1% of the field of view diameter on each axis. This value represents roughly 2.5 arc minutes for the LST, 5 arc minutes for the MST, and 5 arc minutes for the SST. Short term (< 1 min) non‐reproducible tracking deviations should be kept well below that, as they would cause a problem to achieve the required post calibration pointing precision.
3.8. Focal Plane Positioning
In the Z‐direction this is defined as the precision with which the entrance window of the camera pixels (e.g. the input area of light guides in front of the photosensors) should coincide with the focal plane during the observations. In the X and Y directions this is defined as the positioning accuracy of the pixels within this plane.
In z: any movement that causes defocus should be < 25% of a pixel diameter.
In x, y: any movement should be less than 5% of the FoV. Short term (< 1 min) movements should be well below that level.
This prevents significant degradation of the optical PSF and the consequential impact on performance and stability.
3.9. Pointing Precision Post‐Calibration
The required precision for the viewing direction of the camera pixels on the sky ( post‐calibration, after correction using a guide camera and/or pointing correction model) within the “Position Range During Observations” should be less than 7 arc seconds rms in space angle ( 5 arc seconds in elevation and 5 arc seconds/sin(elevation) in azimuth).
3.10. Optical Throughput
The optical throughput of the telescope is the ratio of the number of photons reaching the camera to the number of Cherenkov photons arriving at the telescope. It includes the specular reflection of the dish and the shadowing by the telescope structure. Averaged over the atmospheric Cherenkov spectrum at ground in the wavelength range from 300 to 550 nm the optical throughput should be at least 70 % (e.g. > 80 % mirror reflectivity and ~10 % shadowing by the structure).

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 7/12
4. Camera Requirements
4.1. Camera Field of View
The angular diameter (or equivalent thereof) of the camera field of view is determined by the required “Gamma‐Ray Field of View” as introduced in Level A and varies between the telescopes of the different sub‐systems as follows:
LST: 4.2 – 5 degrees For a camera smaller than 4 degrees in diameter, a significant degradation on the sensitivity is expected even for point like sources. A larger camera may be needed for extended sources or field of views with several sources, and also for enhanced control of background systematics (see references: [RD10, RD11]).
MST: 7 – 8 degrees
Below 6° there is a significant decrease of the collection area; between 6° and 7° there is no variation in sensitivity for on‐axis sources but a reduction for off‐axis sources. Additionally the gamma‐ray PSF for off‐axis observations depends strongly on the camera field of view (see references: [RD10, RD11])..
SST: 7 – 10 degrees
The gamma‐ray field of view of the SST should be similar to that of the MST. A somewhat larger camera field of view than for the MST may be required, as the typical inter‐telescope spacing very likely exceeds that of the MST sub‐system. The shape of the camera field of view should be close to circular in order to reduce the fraction of images clipped at the edge.
4.2. Pixel Size
The angular pixel pitch or spacing (the angular distance between the centers of adjacent pixels) of the camera pixels is determined by the properties of Cherenkov images produced by gamma rays in the target energy ranges of the different sub‐systems (see Section 2). For a given focal length this corresponds to a linear spacing within which the physical pixel size should fit in, with minimal dead space (which is assumed to be zero in the following). LST: 0.07 – 0.12°. The optimum size is likely between 0.07° and 0.1° to optimize the sensitivity at the lowest energies, while ignoring cost implications (~ factor of 2 in camera cost). It is recommended to use the same linear pixel size of 50 mm LST and MST telescopes. This leads to 0.09° for f=31 m, 0.1° for f=28 m. Preliminary studies (not focused on the lowest energies) showed that no improvement was observed with pixel sizes below 0.1° (see references: [RD13]. MST: about 0.18°. Above 0.2° a reduction of the sensitivity (due to reduced gamma/hadron separation power) is expected; below 0.15° no improvement is expected, but camera cost would increase significantly. A linear pixel size of 50 mm is recommended for a telescope focal length of 16 m (see references: [RD14, RD15]), resulting a pixel size of 0.179°. SST: 0.18° – 0.28°. The pixel size of the SST requires cost/performance in the range and will depend on the SST option chosen. Note that if non‐hexagonal pixels are employed, the solid angle subtended should be equal to that of the hexagonal case defined here.

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 8/12
4.3. Camera Weight
The camera weight should be minimized to reduce the cost of the supporting structure. With this in mind, and based on the approximate number of pixels in each telescope type, the current sub‐system telescope specific limit are as follows:
LST: 2000 kg MST: 2500 kg SST: 1500 kg
4.4. Environmental Control
The telescopes will be built without a protecting shelter or dome. Therefore the cameras will be exposed to possibly harsh environmental conditions. Proper pre‐cautions, like sealing, temperature control, lightning protection, etc. have to be implemented.
4.5. Pixel Signal Dynamic Range
The required pixel signal dynamic range is determined by the required telescope sub‐system energy range and impact distance range required. Gamma‐ray showers of any energy and impact distance within this range should be recorded without significant impact on performance due to pixel signal saturation or other dynamic range limitations. The required values are currently under investigation and the current recommendations are roughly 1 – 3000 pe for all pixels in all telescopes of all sub‐systems (see [RD2]) . Electronic resolutions down to about 0.2 photoelectron‐equivalent may be useful for calibration purposes, but could be compensated for by other calibration methods. Large dynamic ranges of the electronics chain may require the use of two electronics channels of different gain per pixel, of which the low gain channel may be read out at lower speed.
4.6. Camera Photon Detection Efficiency
The Photon Detection Efficiency of the camera is defined as the probability of a photon arriving at the camera, coming from the dish, contributes to a detectable signal in the camera. This includes e.g. the throughput of the entrance window, the light guides, the quantum and collection efficiency of the photomultipliers, as well as any loss of signal in the digitization scheme, e.g due to too small and misplaced readout windows Averaged over the atmospheric Cherenkov spectrum at ground in the wavelength range from 300 to 550 nm, the camera photon detection efficiency is required to be at least 12 %. Improvements in photon detection efficiency are possible, through, for example using sBA / uBA photocathodes for photomultipliers, but such gains must be achieved in a cost‐effective way, and without substantial increases in the rate of noise signals above 4 photoelectron amplitudes (such as afterpulses).
4.7. Camera Homogeneity
The camera homogeneity defines the relative response of a camera for showers being recorded at any place in the camera after calibration (flat fielding etc). The camera homogeneity includes the difference in photon‐detection efficiency, trigger efficiency and readout effects post‐calibration, and should be stable to within values to be

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 9/12
determined, to minimise systematic effects and improve reliability of the subsystem. Studies are underway to provide specifications for this parameter for the different sub‐systems.
4.8. Signal Charge Resolution
The lower limit for the charge resolution of a PMT‐camera channel is given by the Poisson fluctuation in the number of photoelectrons (p.e.) generated by the incoming photons and the intrinsic excess noise factor (ENF) of the photomultipliers, which is typically in the range of 1.1‐1.2. The theoretical limit for the relative charge resolution of a signal of N p.e. in a PMT camera is therefore given by:
dQ/Q = ENF / sqrt(N) ~ 1.15 /sqrt(N) [1.1 to 1.2 / sqrt(N)] In the presence of a typical night sky background level in a dark region of the sky (see Lvl A requirements) , the charge resolution for signals from 5 to several hundred photoelectrons should not exceed this theoretical limit by more than another factor of 1.2 . For larger signals, a relative charge resolution per pixel of about 5 %, e.g. dominated by phase errors in the signal sampling, is acceptable. Table 1 give examples of the required resolution for different amplitudes. Figure 1 shows the relative contributions. Table 1 : Examples of required relative charge resolution dQ/Q for different Cherenkov light signal amplitudes, expressed in units of photoelectrons.
20 50
44 10
62 5
dQ / Q [%] Signal [p.e.]
5 3000
7 600
14 100
dQ / Q [%] Signal [p.e.]

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 10/12
0.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
1 10 100 1000 10000
Signal photo electrons
Re
so
luti
on
[%
]
Poisson
addt'l ENF= "theoret. lim."
addtl' NSB
Addt'l Phase
Requirement
Figure 1 Relative charge resolution dQ/Q for different Cherenkov light signal amplitudes, expressed in units of photoelectrons (p.e.) . The red line describes the required performance. The other lines are for reference, and illustrate the contributions of different effect to the charge resolution. Black: limit due to poissonian fluctuations in number of p.e. released from the photocathode. Pink line includes the ENF of the tube, the blue one adds in addition the effect of the night sky background, here assumed with a mean contribution of 1 p.e. per readout window. The green line indicates the transition from the statics limited regime to the regime, where the resolution is limited by e.g. phase errors.
4.9. Signal Time Resolution
Pulse arrival time information in pixels can help to reduce the impact of night sky background on the image reconstruction. In addition the use of the time gradient across an image might improve shower reconstruction. The Signal Time Resolution of a camera pixel is defined as the resolution for the measured arrival time of the Cherenkov light pulse in the pixel, after calibration. The resolution is influenced e.g. by the intrinsic PMT transit time jitter, the night sky background, electronics noise, as well as by the time reconstruction method. For signal amplitudes of more than 5 photoelectrons a pixel charge resolution of better than 2 ns is required under normal night sky background conditions (see Level A, sec. 4.1.1).

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 11/12
4.10. Minimum Gamma‐Ray Image Amplitude
A gamma‐ray image illuminating a compact region located in any region over 90% of the area of the camera, which triggers a given camera with 50% probability, should have a total minimum intensity no larger than 100 photoelectrons for all telescopes of all sub‐systems.
4.11. Camera Dead Time
The dead time of a camera of any telescope within any sub‐system should not violate the requirement in Level A Section 3.8, and should be on average less than 5% under normal operation conditions.
4.12. Allowed Trigger Rate due to Night Sky Background
Cherenkov cameras also trigger due to fluctuations and signals induced by the background light of the night sky. These background triggers can introduce dead time for the cameras and the system, but also an irreducible background for the analysis, depending on the trigger condition of the cameras. At the nominal setting of the trigger to achieve the required minimum gamma‐ray image amplitude (see 4.10), the allowed camera trigger rate due to night sky background should be less than about 5 kHz. In case of a camera trigger condition that already requires the image to resemble gamma‐ray images this value is reduced to about 100 Hz.
4.13. Trigger and readout rate to handle
The cameras need to be able to operate at a sustained camera trigger and readout rate of at least 10 kHz for the LST and MST and 1 kHz for the SST, within the given dead time limits (see 4.11).

CTA Ref : TPC‐SPECS/110331b CTA
EDMS id :
Edition : 1.0
Date: June 7, 2011
Level B: Preliminary CTA Sub‐System
Performance Requirements Page : 12/12
5. Array Tr igger
The array trigger is a central sub‐system that enables the selection of events online during operation, which have been detected by a predefined minimum number of telescopes, or predefined combinations of telescopes (see references: [RD3, RD4, RD5]). The array trigger serves to reduce the rate of acquired background events, while keeping gamma‐ray like events with high efficiency. It is used to reduce the dead time of the telescope system, generated either by dead time of the camera readout, or by limitation in the data handling capabilities. It consists at minimum of a timing system, to measure the relative arrival time of events at the telescopes and a central software‐ or hardware‐based unit that derives the array trigger decision. The array trigger decision is based on trigger information, provided by the telescopes. Asynchronous trigger schemes, as well as synchronous schemes could be envisaged. Using up‐to‐date technology for event digitization and data buffering, an asynchronous, software‐based scheme is preferred. The array trigger needs to be configurable in the parameters below. The optimization of the settings will be done through Monte Carlo simulations. The array trigger system shall provide the following features:
1) relative timing information for the event arrival time at the telescopes with accuracies of better than 5 nsec (rms).
2) response time of less than 100 msec in an asynchronous scheme, or less than 3 usec in a synchronous scheme, including signal travel time between the array trigger unit at the telescopes.
3) measurement of absolute event arrival time information with an accuracy of better 10 usec
4) option to be freely configurable on the number and configuration of sub‐arrays that might be operational in parallel.
5) configurable coincidence time window from a few nsec up to several hundred (~400) nsec, depending on telescopes type and position.
6) configurable time window for accepting data from other telescopes after a valid array trigger has occurred.
7) option to measure the dead time of the telescopes and the sub‐arrays
8) provide info on event by event basis, which telescopes contribute to the event and which telescopes might have been busy.
9) option to base the trigger decision on additional event information from the telescopes, like e.g. image intensity or location inside the camera.
10) shall be able to operate at array trigger rates of > 30 kHz, and sustained single telescope trigger rates of 10‐20 kHz.

CTA Ref : TPC‐SPECS/110331c CTA
EDMS id :
Edition : 1.00
Date: June 7, 2011
Reference Documents for Preliminary CTA Performance Requirements Level A and B
Page : 1/2
Reference Documents for Preliminary CTA Performance Requirements Level A and B
Author Laboratory Approved by Laboratory
Konrad Bernlöhr (konrad.bernloehr@mpi‐hd.mpg.de)
Oscar Blanch Bigas ([email protected])
Rodolfo Canestrari ([email protected])
Carlos Delgado ([email protected])
Andreas Förster (andreas.foerster@mpi‐hd.mpg.de)
German Hermann
(german.hermann@mpi‐hd.mpg.de)
Jim Hinton ([email protected])
Bruno Khélifi ([email protected])
Pascal Vincent ([email protected])
Richard White ([email protected])
plus members of the CTA Design Study Work Packages
German Hermann (Technical Coordinator)
March 31st, 2011
History
Edition Date Observation 0.0 2011‐03‐31 New document
1.0 2011‐06‐07 Added few WWW links
Distribution CTA internal

CTA Ref : TPC‐SPECS/110331c CTA
EDMS id :
Edition : 1.00
Date: June 7, 2011
Reference Documents for Preliminary CTA Performance Requirements Level A and B
Page : 2/2
[RD1] The CTA consortium: Design Concepts for the Cherenkov Telescope Array CTA” (arXiv:1008.3703) [RD2] White, R. J. et. al., “Energy Ranges and Dynamic Ranges for the CTA Telescopes”, CTA Internal Note, March, 2011, http://www.cta‐observatory.org/ctawpcwiki/index.php/File:RW_EnergyAndDynamicRanges.pdf [RD3] Bulian, N. et. al., "Characteristics of the Multi‐Telescope Coincidence Trigger of the HEGRA IACT System", Astroparticle Physics, Volume 8, Number 4, pp. 223‐233, 1998 [RD4] Funk, S., et. al., "The trigger system of the H.E.S.S. telescope array", Astroparticle Physics, Volume 22, Issue 3‐4, p. 285‐296, 2004 [RD5] Hermann, G. et. al., “A Trigger and Readout Scheme for future Cherenkov Telescope Arrays”, 4th Heidelberg International Symposium on High Energy Gamma‐Ray Astronomy, 2008, http://arxiv.org/abs/0812.0762 [RD6] Bernlöhr, K., et. al., "Report of the TRIG Subtask", CTA Internal Note, November, 2009, http://www.cta‐observatory.org/ctawpcwiki/images/4/41/CTA_MC_SubTaskRep09_Trigger_v2.pdf [RD7] Benn, C. and Ellison, S., “LA Palma Night‐Sky Brightness”, New Astronomy Reviews 42, 503, 1998, astro‐ph/9909153 [RD8] Panter, M., “Work Packages TEL and MIR”, TEL / MIR WP Meeting, Heidelberg, March, 2010 http://www.cta‐observatory.org/ctawpcwiki/images/1/13/WP_TEL_HD0310_panter.pdf [RD9] Bernlöhr, K., “A comparison of optical point‐spread functions for a 12‐m IACT”, CTA Internal Note, November, 2009, http://www.cta‐observatory.org/ctawpcwiki/images/a/ab/CTA_MC_Note4_MST_PSF.pdf [RD10] Hinton, J., “Field‐of‐view Optimisation in the presence of Systematics”, CTA Consortuim Meeting, Zeuthen, May, 2010 http://www.cta‐observatory.org/ctawpcwiki/images/1/17/Mc zeuthen fov hinton.pdf [RD11] Colin, P., “Off‐axis performances studies”, MC WP Meeting, Leicester, March 2011, http://www.lsw.uni‐heidelberg.de/indico/getFile.py/access?contribId=7&resId=0&materialId=slides&confId=51 [RD12] G. Maier, “Off‐axis performances“, CTA Consortuim Meeting, Zeuthen, May, 2010, http://www.cta‐observatory.org/ctawpcwiki/images/4/4b/Mc_zeuthen_offaxis_maier.pdf [RD13] Bernlöhr, K., Funk, S. & Hinton, J. “CTA Monte Carlo Work Package: Subtask Pixel Size Status Report”, CTA Internal Note, September 2009 http://www.cta‐observatory.org/ctawpcwiki/images/e/e6/CTA_MC_SubTaskRep09_PixelSize.ps [RD14] Bernlöhr, K., “Performance of Heidelberg CTA configurations”, MC WP Meeting, Berlin, May, 2008, http://www.cta‐observatory.org/ctawpcwiki/images/a/a6/Kb_performance.pdf [RD15] Funk, S., “MC Studies”, Heidelberg, MC WP Meeting, July, 2008, http://www.cta‐observatory.org/ctawpcwiki/images/e/eb/WP_MC_Heidelberg_Funk_Sim.ppt