Embed Size (px)
Citation preview
TTK4165
Color Flow Imaging
Hans Torp Department of Circulation and Medical Imaging
NTNU, Norway
Hans TorpNTNU, Norway
Color flow imagingColor flow imaging
• Estimator for velocity and velocity spreadEstimator for velocity and velocity spread power, mean frequeny, bandwidth power, mean frequeny, bandwidth
• Color mapping and visualizationColor mapping and visualization
• Clutter filteringClutter filtering
• Scanning strategiesScanning strategies
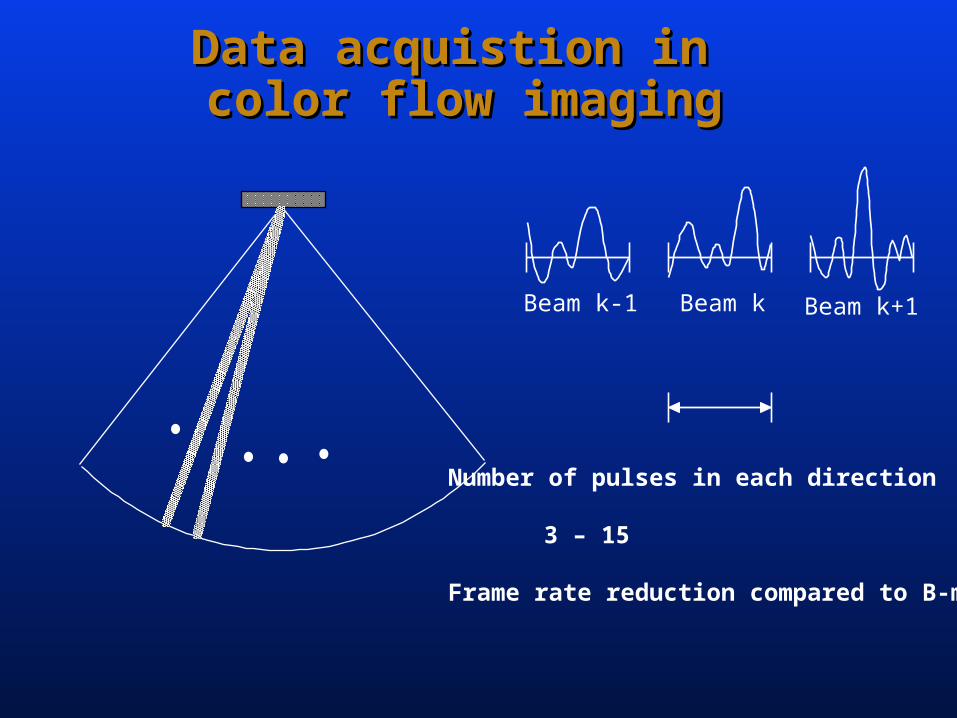
Data acquistion in Data acquistion in color flow imagingcolor flow imaging
Beam k-1 Beam k Beam k+1
Number of pulses in each direction
3 – 15
Frame rate reduction compared to B-mode
2D Color flow imaging2D Color flow imaging
1. Limited information content in the signal, i.e. short observation time, low signal-to-noise ratio, and low Nyquist velocity limit.
2. Insufficient signal processing/display. Full spectrum analysis in each point of the sector is difficult to visualize.
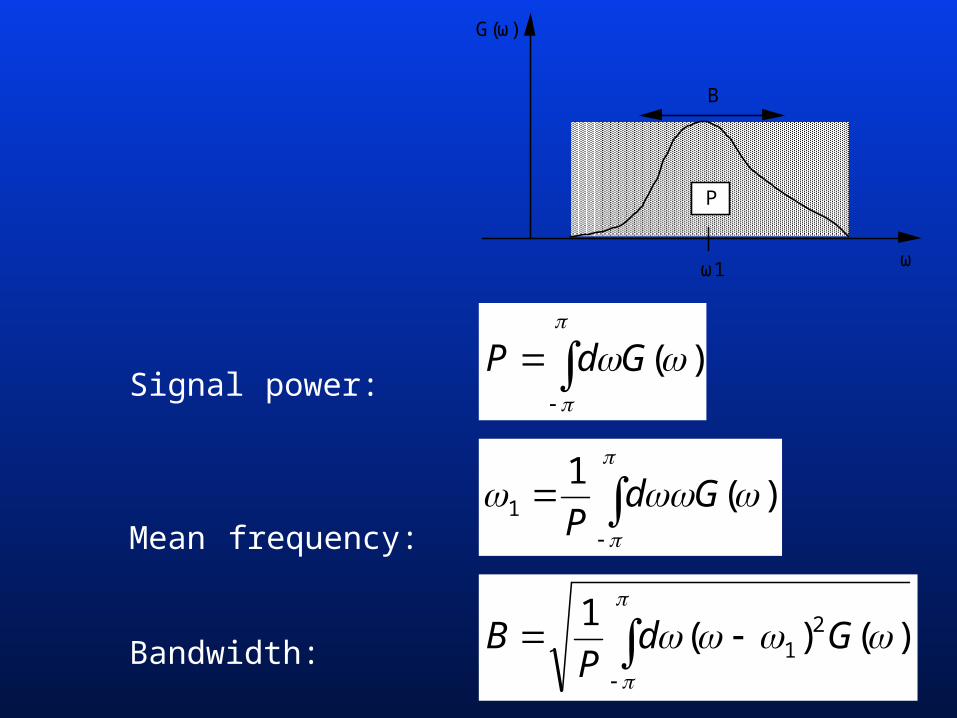
Signal power:
Mean frequency:
Bandwidth:
)(GdP
)(1
1 GdP
)()(1 2
1 GdP
B
G(ω)
P
B
ω1 ω
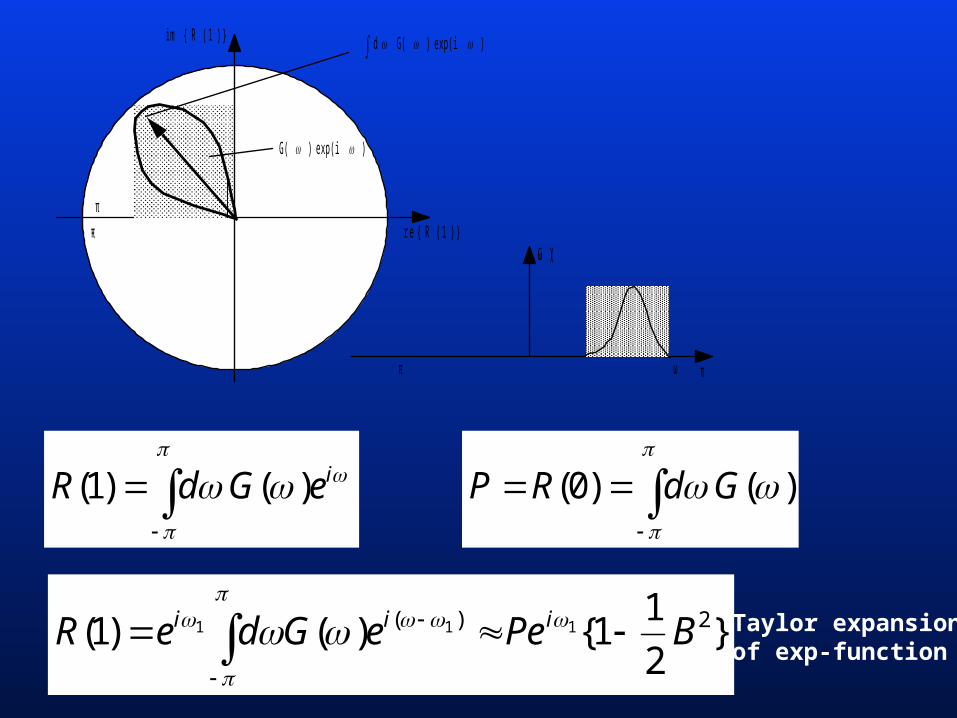
ieGdR )()1(
}2
11{ )()1( 2)( 111 BPeeGdeR iii
)exp(i )G(
)exp(i )G( d i m { R ( 1 ) }
r e { R ( 1 ) }
π
- πG (ω )
πω- π
Taylor expansionof exp-function
)()0( GdRP
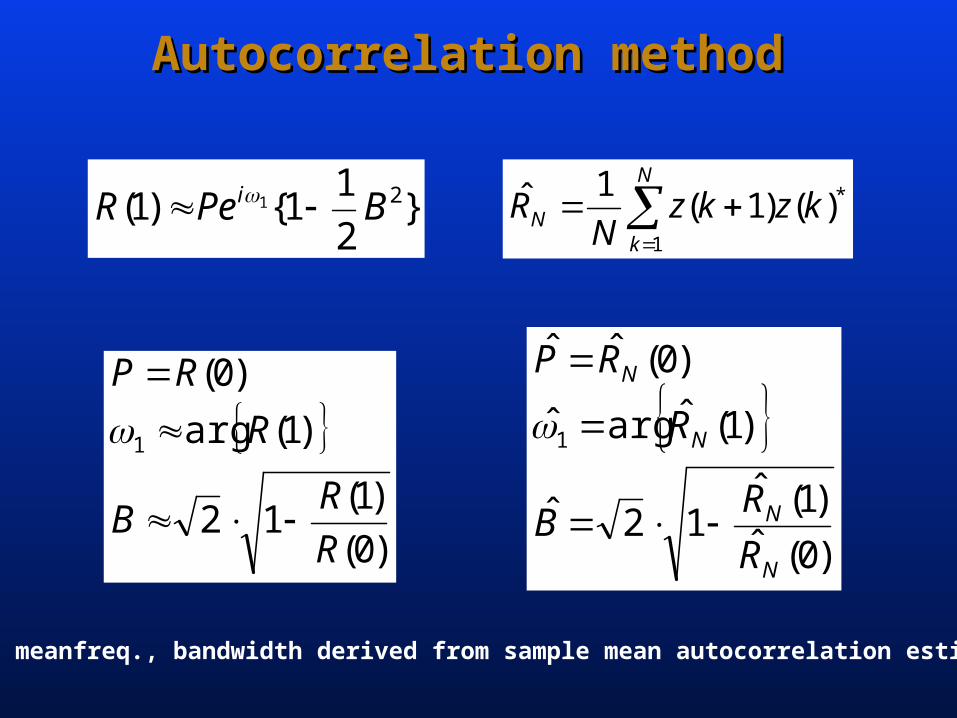
Autocorrelation methodAutocorrelation method
}2
11{ )1( 21 BPeR i
)0(
)1(12
)1(arg
)0(
1
R
RB
R
RP
N
kN kzkz
NR
1
*)()1(1ˆ
)0(ˆ)1(ˆ
12ˆ
)1(ˆargˆ
)0(ˆˆ
1
N
N
N
N
R
RB
R
RP
Power, meanfreq., bandwidth derived from sample mean autocorrelation estimator
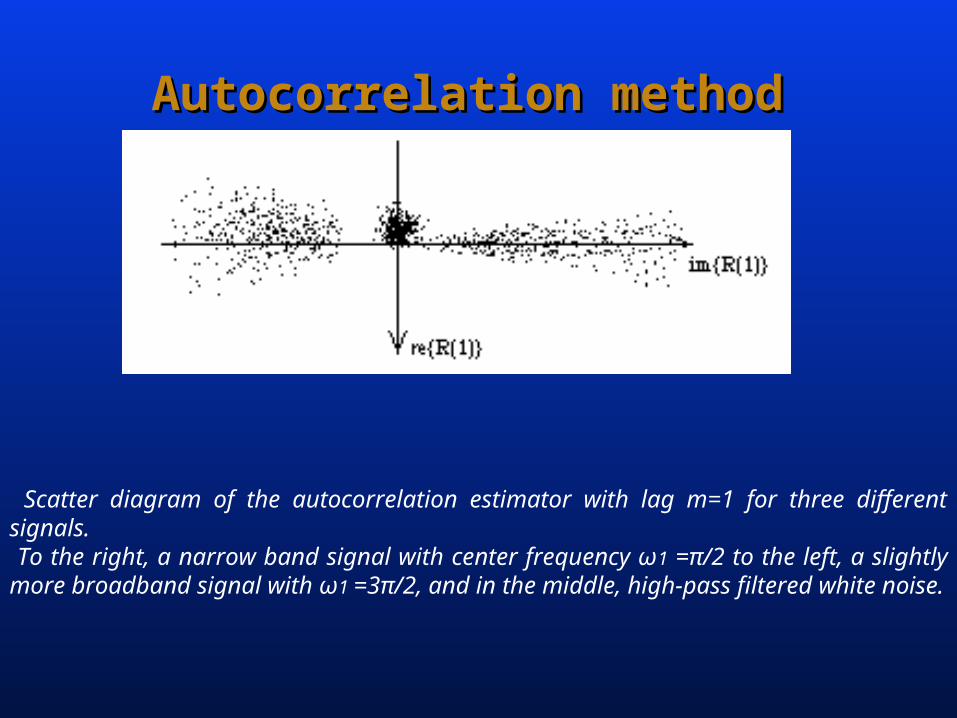
Scatter diagram of the autocorrelation estimator with lag m=1 for three different signals. To the right, a narrow band signal with center frequency ω1 =π/2 to the left, a slightly more broadband signal with ω1 =3π/2, and in the middle, high-pass filtered white noise.
Autocorrelation methodAutocorrelation method
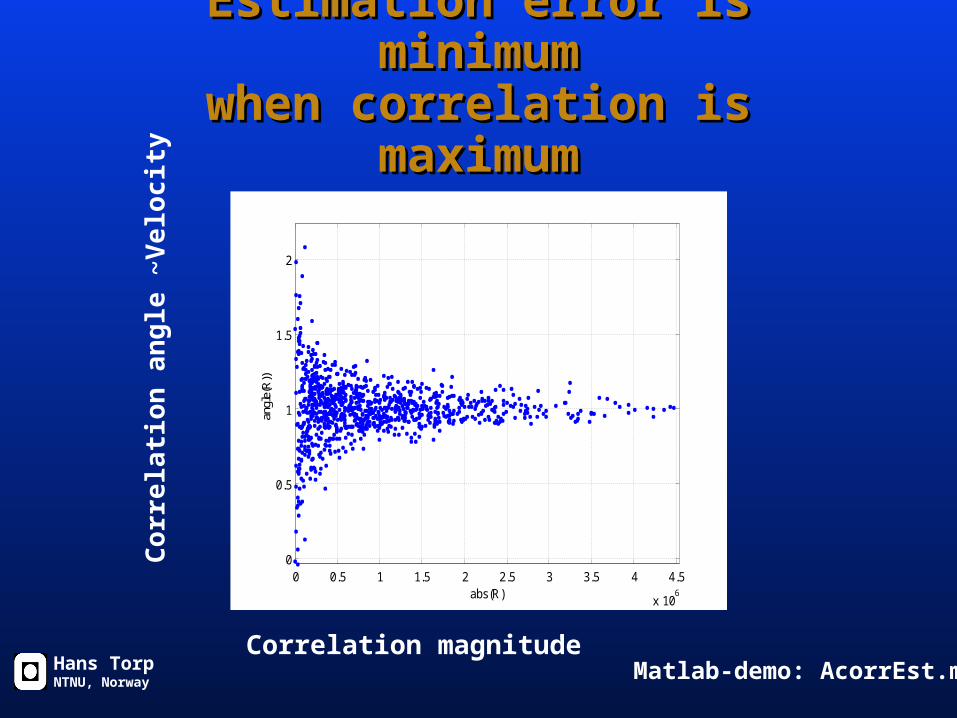
Estimation error is minimumEstimation error is minimumwhen correlation is maximumwhen correlation is maximum
Hans TorpNTNU, Norway
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
x 106
0
0.5
1
1.5
2
abs(R)
angl
e(R
))
Correlation magnitude
Cor
rela
tion
an
gle
~Vel
ocit
y
Matlab-demo: AcorrEst.m
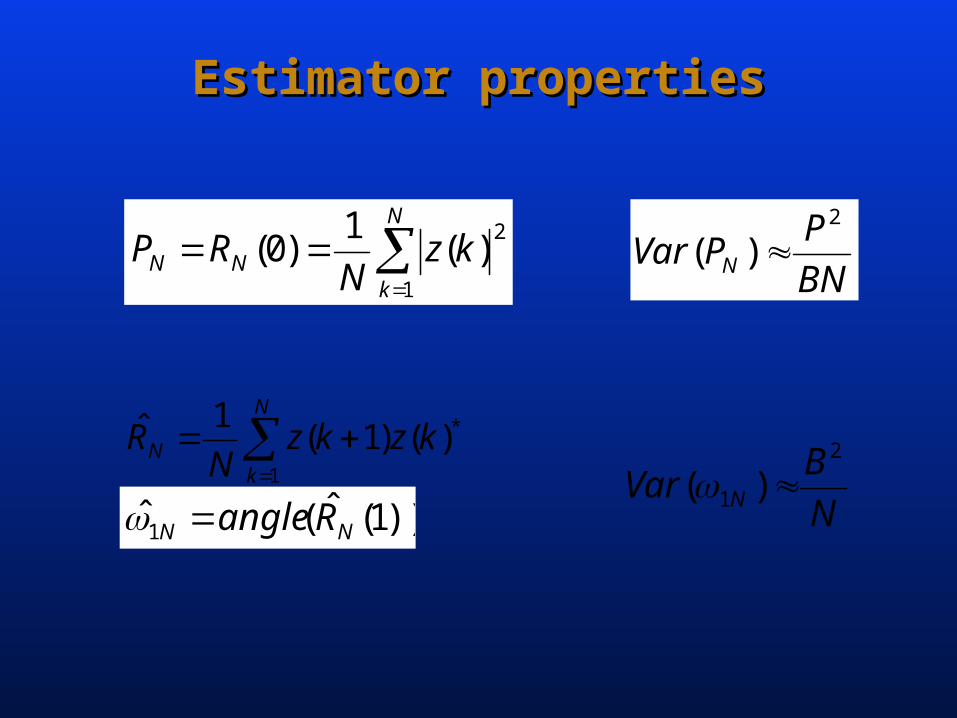
Estimator propertiesEstimator properties
BN
PPVar N
2
)(
N
kNN kz
NRP
1
2)(
1)0(
N
BVar N
2
1 )(
N
kN kzkz
NR
1
*)()1(1ˆ
))1(ˆ(ˆ1 NN Rangle
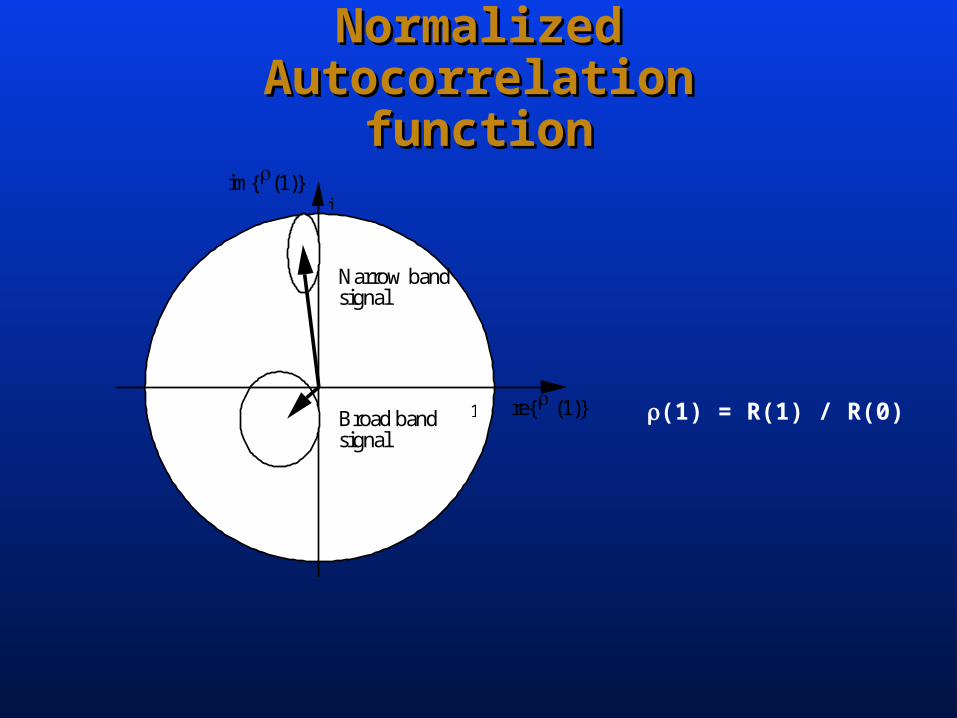
Normalized Autocorrelation Normalized Autocorrelation functionfunction
im{(1)}
re{ (1)}
Narrow band signal
Broad band signal
1
i
(1) = R(1) / R(0)
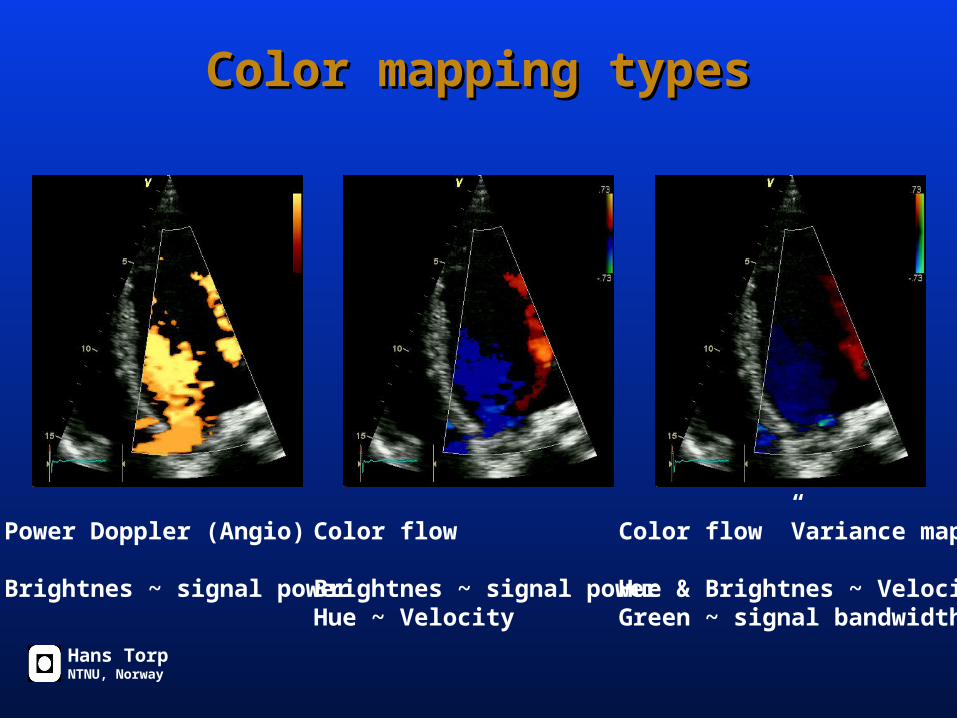
Color mapping typesColor mapping types
Hans TorpNTNU, Norway
Power Doppler (Angio)
Brightnes ~ signal power
Color flow
Brightnes ~ signal powerHue ~ Velocity
Color flow ”Variance map”
Hue & Brightnes ~ VelocityGreen ~ signal bandwidth
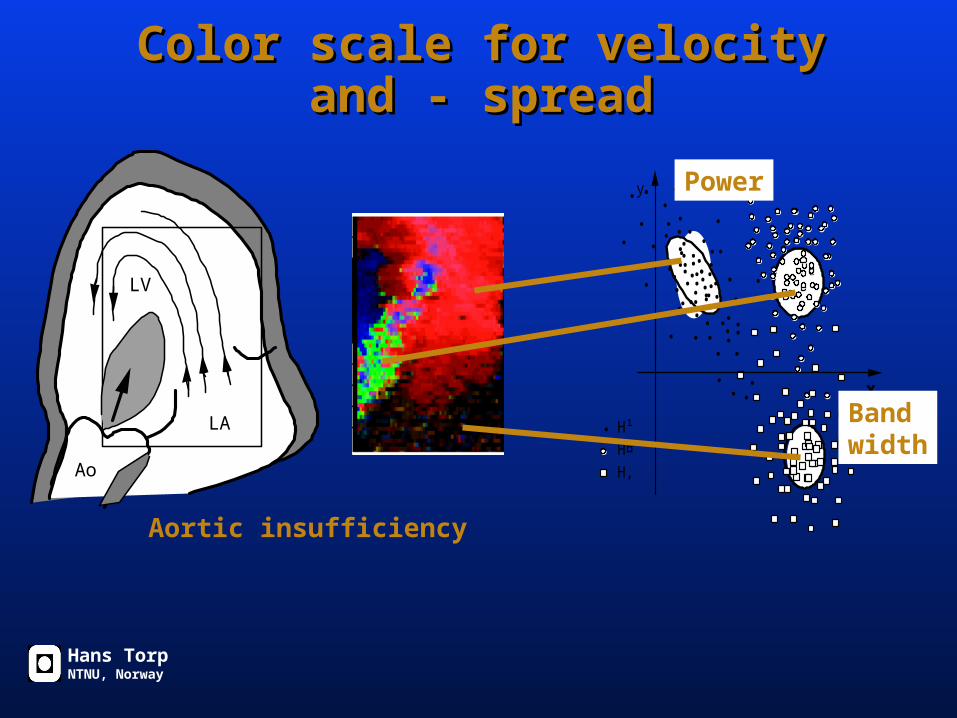
Color scale for velocity and - spreadColor scale for velocity and - spread
•• •
••
••
••
•• •• • •
••••
••
•
•••
••
••
•••
•
•
•
• • ••
•
•
•
•
•••
••••
••
•••• •
••
••••
••
•••
•••
•
• H¹H¤H‚
•
•
•
y
x
Ao
LV
LA
Power
Bandwidth
Aortic insufficiency
Hans TorpNTNU, Norway
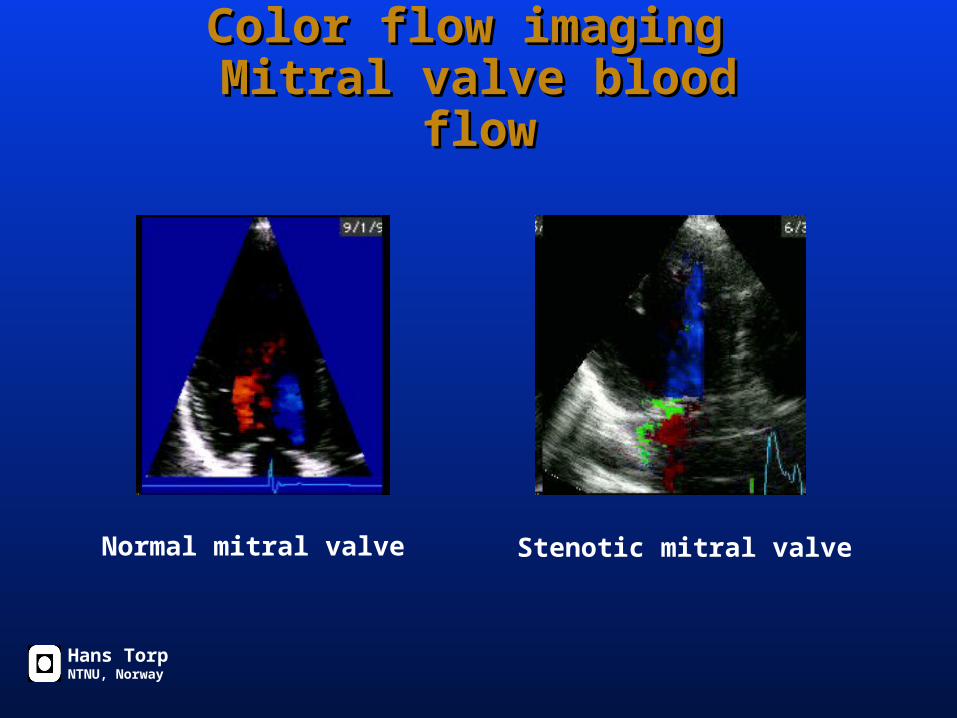
Color flow imaging Color flow imaging Mitral valve blood flowMitral valve blood flow
Normal mitral valve Stenotic mitral valve
Hans TorpNTNU, Norway
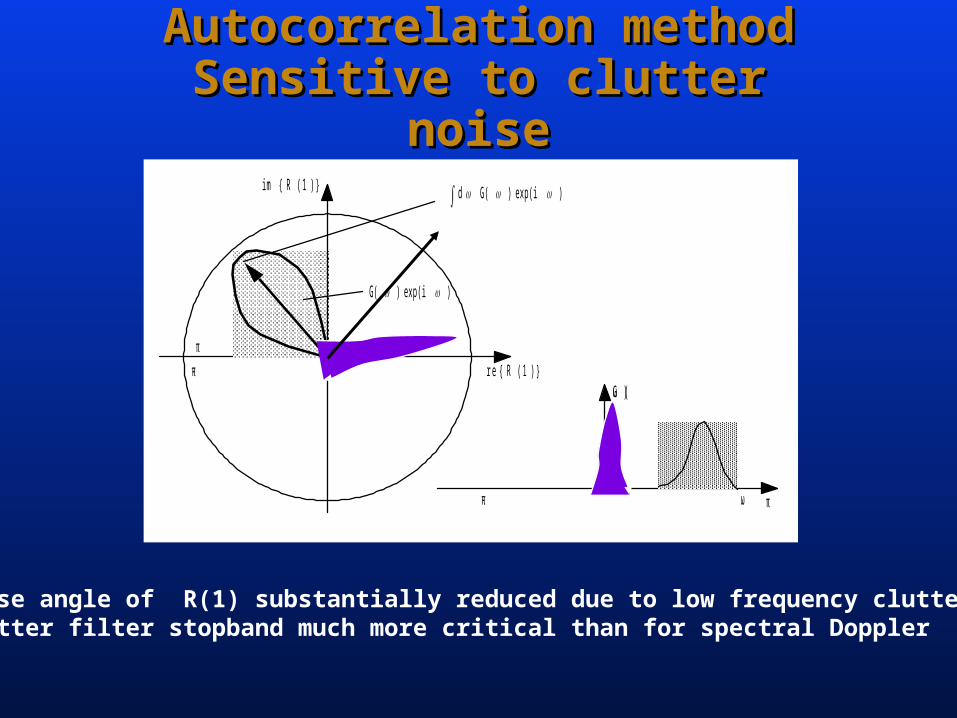
Autocorrelation methodAutocorrelation methodSensitive to clutter noiseSensitive to clutter noise
)exp(i )G(
)exp(i )G( d i m { R ( 1 ) }
r e { R ( 1 ) }
π
- πG (ω )
πω- π
Phase angle of R(1) substantially reduced due to low frequency clutter signalClutter filter stopband much more critical than for spectral Doppler
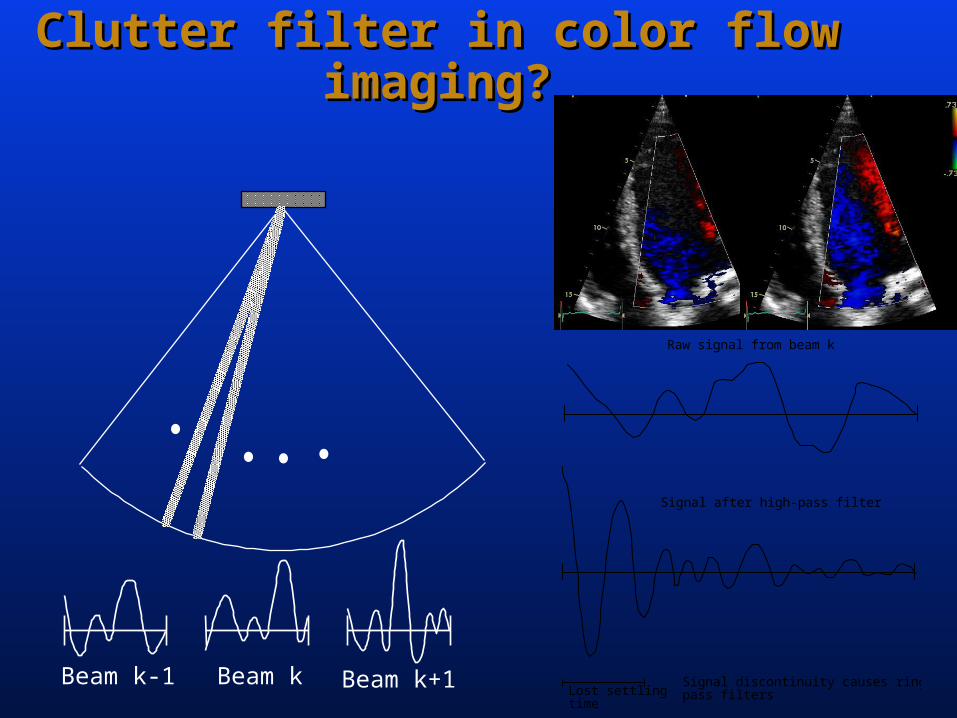
Clutter filter in color flow imaging?Clutter filter in color flow imaging?
Beam k-1 Beam k Beam k+1 Signal discontinuity causes ringing in high-pass filters
Raw signal from beam k
Signal after high-pass filter
Lost settling time
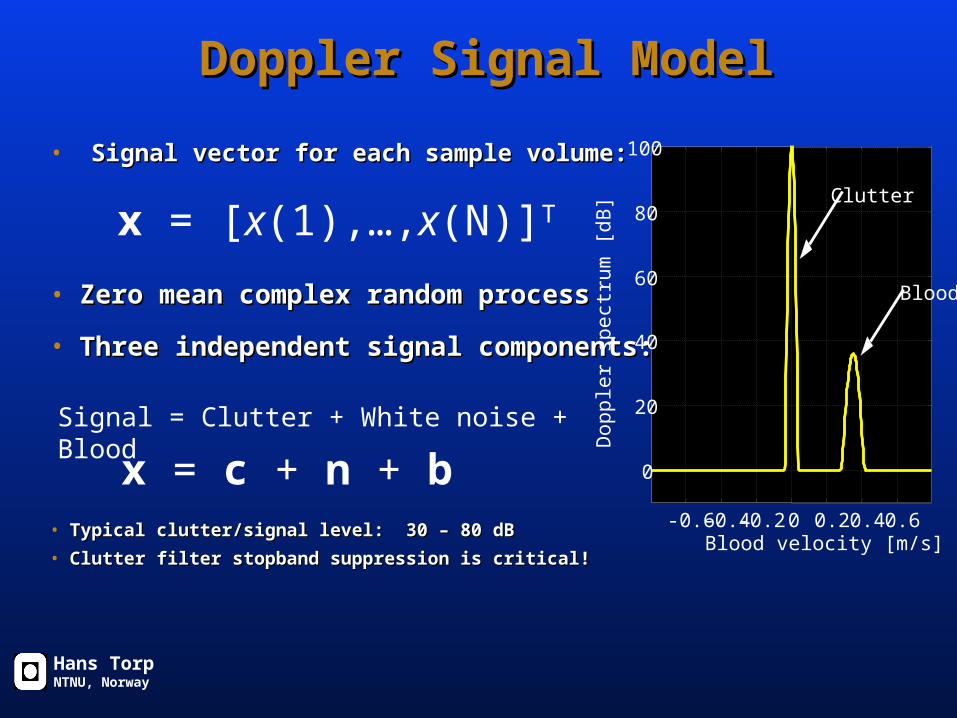
Doppler Signal ModelDoppler Signal Model
• Signal vector for each sample volume:Signal vector for each sample volume:
x = [x(1),…,x(N)]T
Signal = Clutter + White noise + Blood
x = c + n + b• Typical clutter/signal level: 30 – 80 dBTypical clutter/signal level: 30 – 80 dB
• Clutter filter stopband suppression is critical!Clutter filter stopband suppression is critical!
• Zero mean complex random processZero mean complex random process
• Three independent signal components:Three independent signal components:
Hans TorpNTNU, Norway
-0.6-0.4-0.2 0 0.2 0.4 0.6
0
20
40
60
80
100
Blood velocity [m/s]
Do
pp
ler
spe
ctru
m [
dB
]
Clutter
Blood
Approaches to clutter filteringApproaches to clutter filteringin color flow imagingin color flow imaging
• IIR-filter with initialization techniquesIIR-filter with initialization techniques
• Short FIR filtersShort FIR filters
• Regression filtersRegression filters
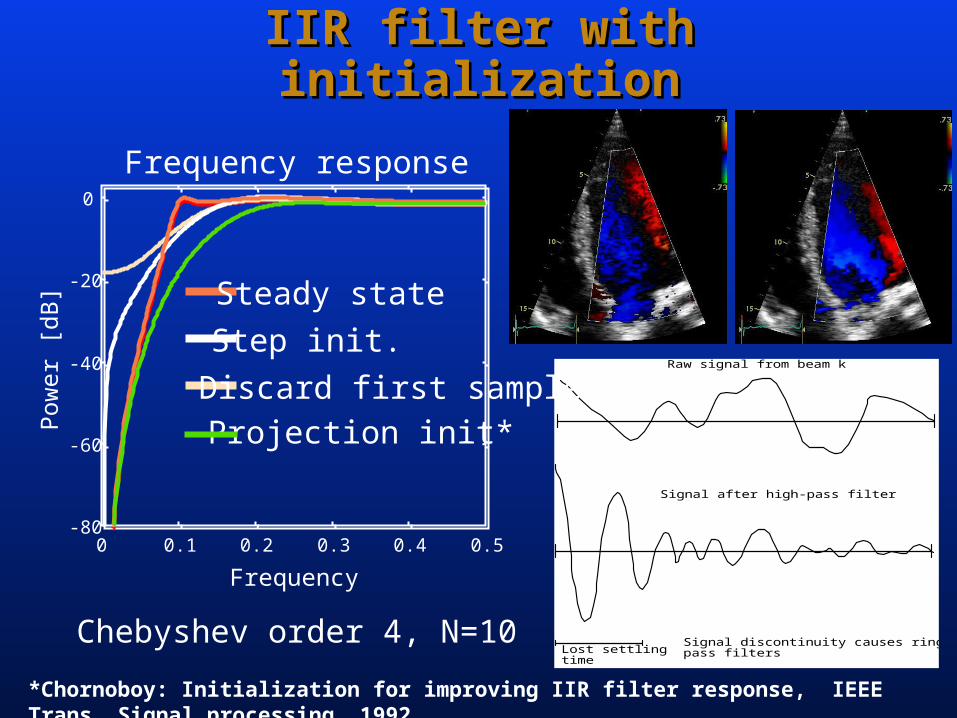
IIR filter with initializationIIR filter with initialization
Signal discontinuity causes ringing in high-pass filters
Raw signal from beam k
Signal after high-pass filter
Lost settling time
Chebyshev order 4, N=10
Pow
er [
dB]
Frequency
0 0.1 0.2 0.3 0.4 0.5-80
-60
-40
-20
0
Frequency response
Steady state
Step init.
Discard first samples
Projection init*
*Chornoboy: Initialization for improving IIR filter response, IEEE Trans. Signal processing, 1992
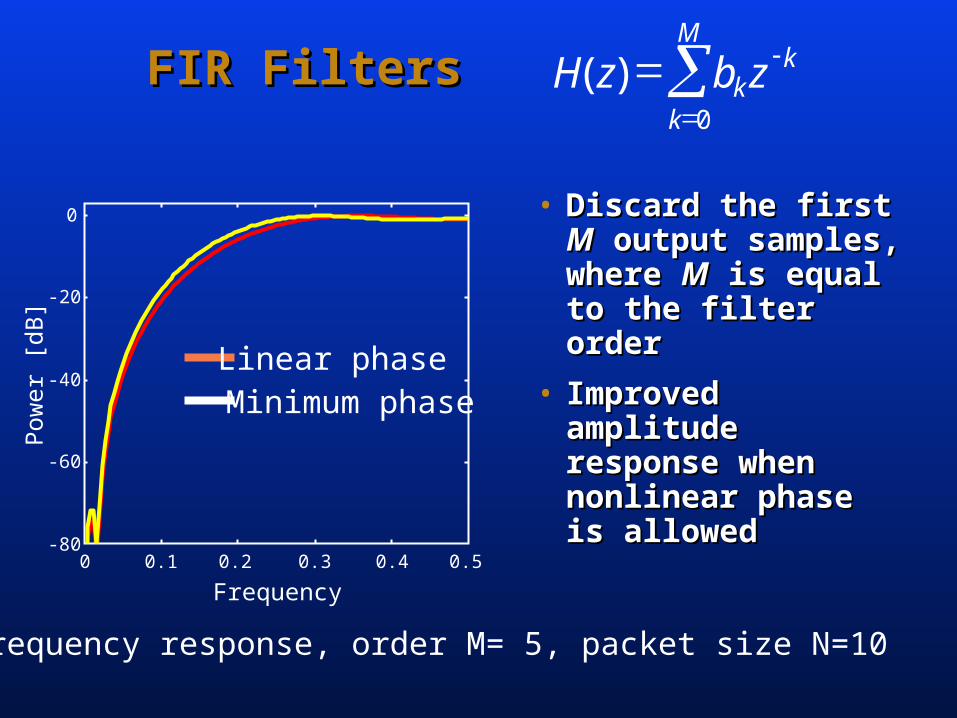
FIR FiltersFIR Filters
• Discard the first Discard the first MM output samples, where output samples, where MM is equal to the filter is equal to the filter orderorder
• Improved amplitude Improved amplitude response when nonlinear response when nonlinear phase is allowedphase is allowed
0 0.1 0.2 0.3 0.4 0.5-80
-60
-40
-20
0
Pow
er [
dB]
Frequency
Frequency response, order M= 5, packet size N=10
M
k
kkzbzH
0
)(
Linear phaseMinimum phase
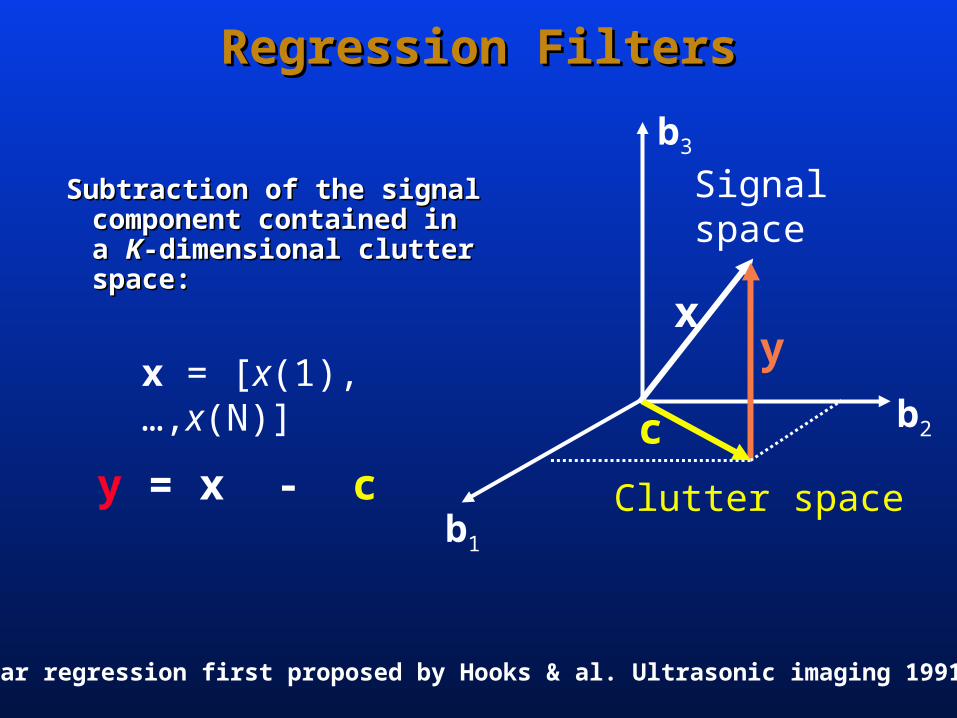
Regression FiltersRegression Filters
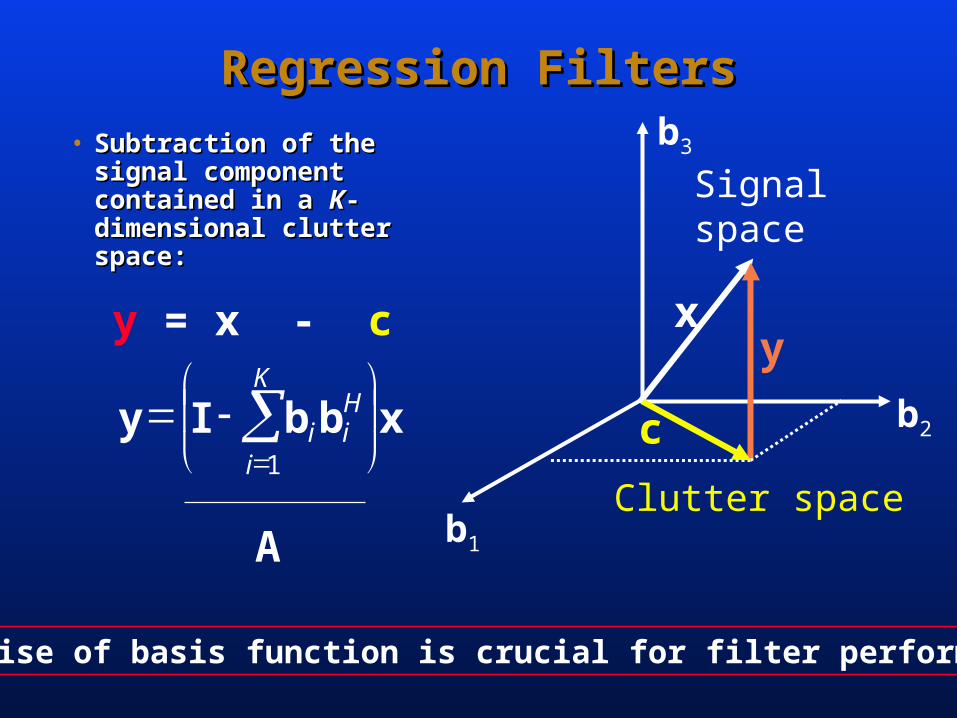
Subtraction of the signal Subtraction of the signal component contained in a component contained in a KK-dimensional clutter -dimensional clutter space:space:
Signal space
Clutter spaceb1
b2
b3
xy
cy = x - c
Linear regression first proposed by Hooks & al. Ultrasonic imaging 1991
x = [x(1),…,x(N)]
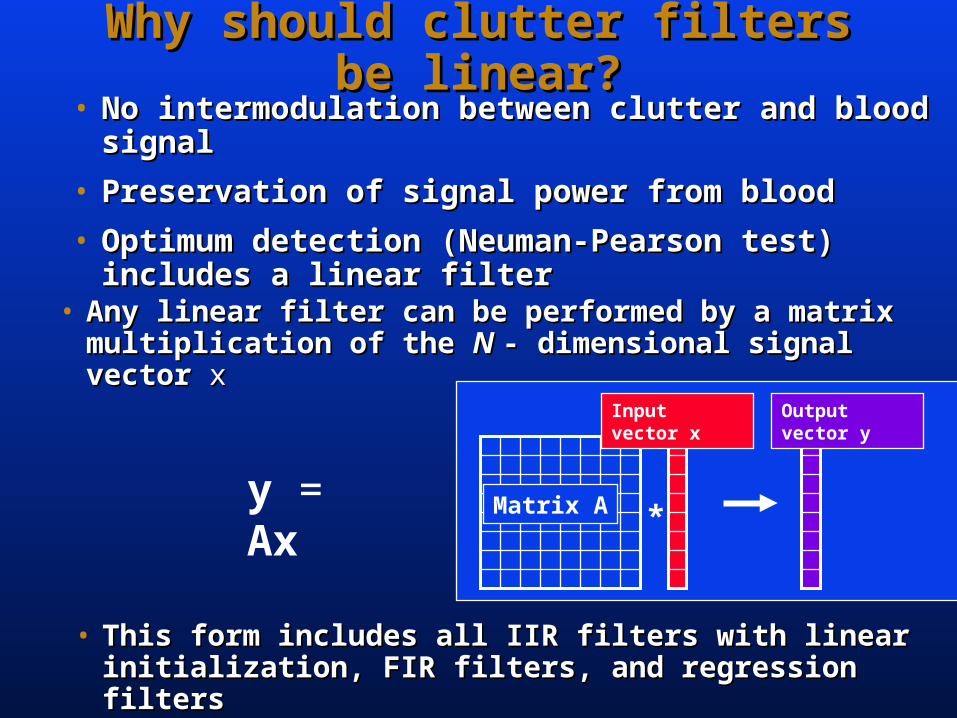
Why should clutter filters be linear?Why should clutter filters be linear?• No intermodulation between clutter and blood signalNo intermodulation between clutter and blood signal
• Preservation of signal power from bloodPreservation of signal power from blood
• Optimum detection (Neuman-Pearson test) includes a linear Optimum detection (Neuman-Pearson test) includes a linear filter filter
y = Ax
• Any linear filter can be performed by a matrix multiplication Any linear filter can be performed by a matrix multiplication of the of the N N - dimensional signal vector - dimensional signal vector xx
• This form includes all IIR filters with linear initialization, FIR This form includes all IIR filters with linear initialization, FIR filters, and regression filtersfilters, and regression filters
*Matrix A
Input vector x Output vector y
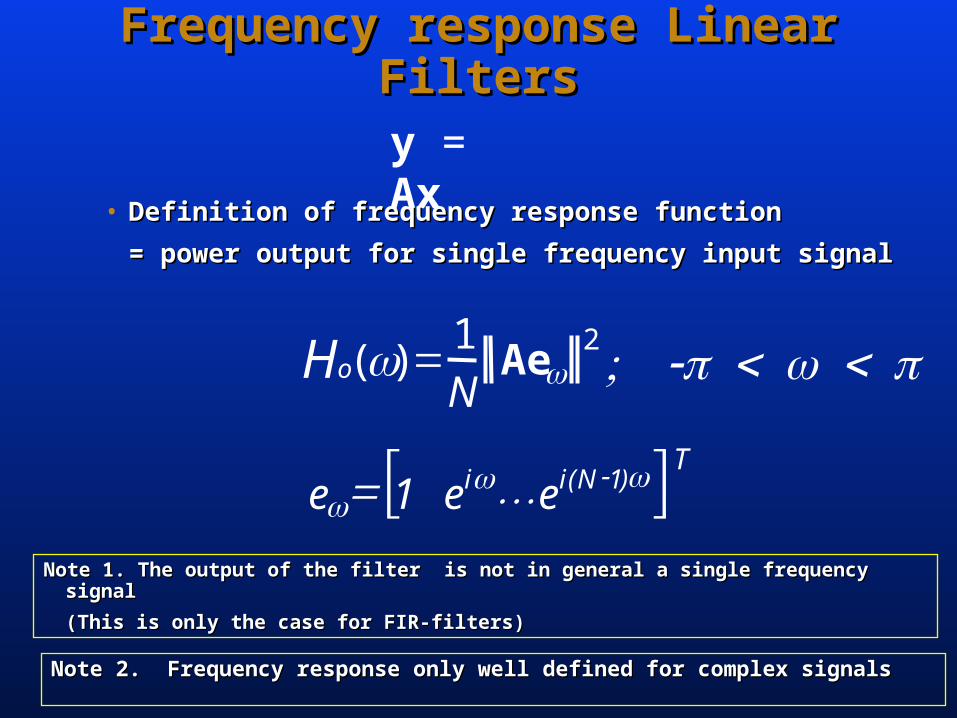
Frequency response Linear FiltersFrequency response Linear Filters
y = Ax
• Definition of frequency response function Definition of frequency response function
= power output for single frequency input signal= power output for single frequency input signal
21)( Ae
NHo
TNii eee
)1(1
Note 1. The output of the filter is not in general a single frequency signalNote 1. The output of the filter is not in general a single frequency signal
(This is only the case for FIR-filters)(This is only the case for FIR-filters)
Note 2. Frequency response only well defined for complex signalsNote 2. Frequency response only well defined for complex signals
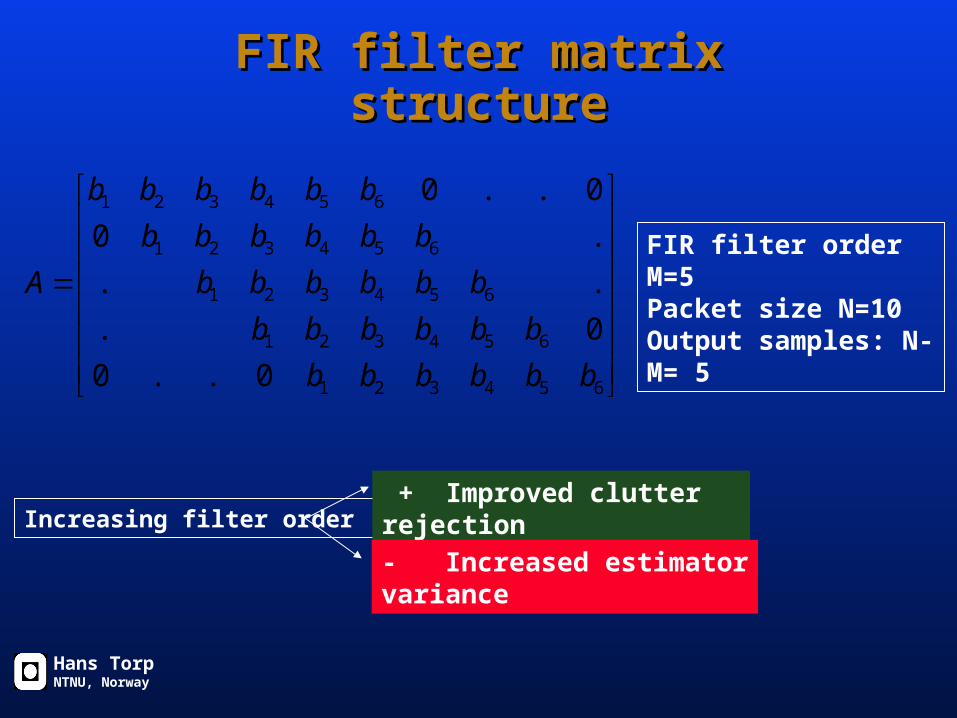
FIR filter matrix structureFIR filter matrix structure
654321
654321
654321
654321
654321
0..0
0.
..
.0
0..0
bbbbbb
bbbbbb
bbbbbb
bbbbbb
bbbbbb
AFIR filter order M=5Packet size N=10Output samples: N-M= 5
Increasing filter order + Improved clutter rejection
- Increased estimator variance
Hans TorpNTNU, Norway
Regression FiltersRegression Filters
• Subtraction of the signal Subtraction of the signal component contained in a component contained in a KK-dimensional clutter -dimensional clutter space:space:
xbbIy
K
i
Hii
1
Signal space
Clutter spaceb1
b2
b3
xy
c
Choise of basis function is crucial for filter performance
y = x - c
A
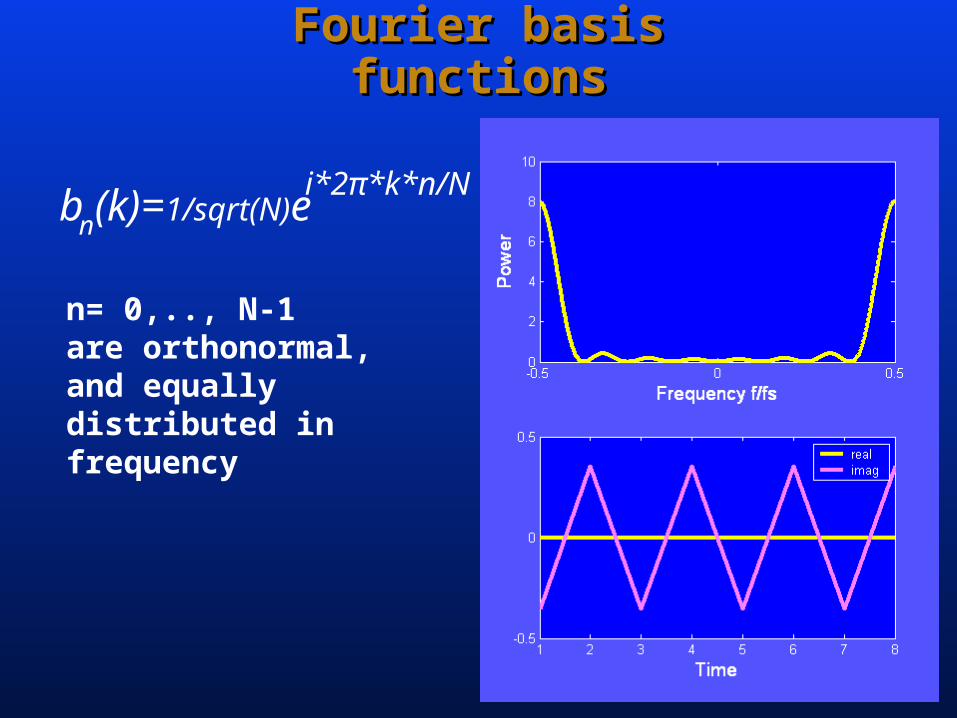
Fourier basis functionsFourier basis functions
nb (k)=1/sqrt(N)ei*2π*k*n/N
n= 0,.., N-1are orthonormal, and equally distributed in frequency
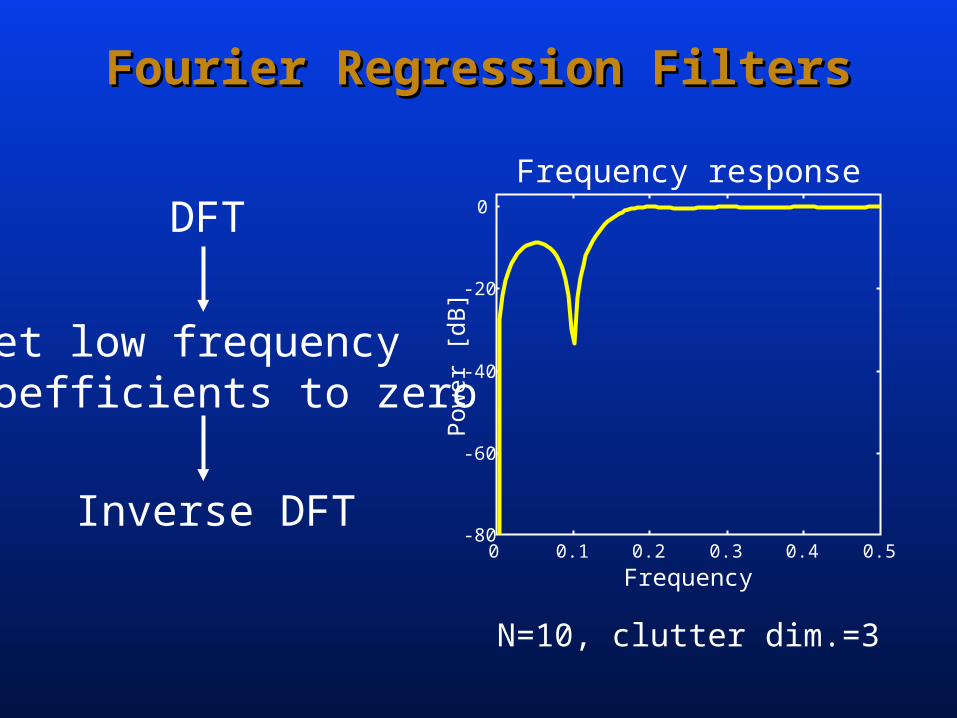
Fourier Regression FiltersFourier Regression Filters
DFT
Set low frequency coefficients to zero
Inverse DFT0 0.1 0.2 0.3 0.4 0.5
-80
-60
-40
-20
0
Frequency
Pow
er [
dB]
Frequency response
N=10, clutter dim.=3
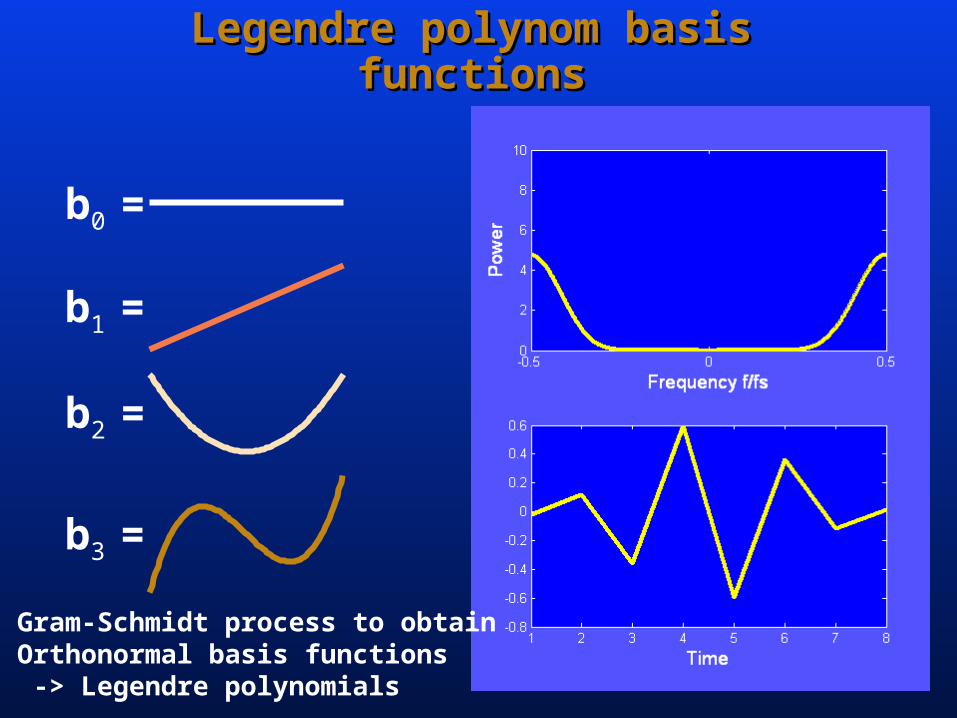
Legendre polynom basis functionsLegendre polynom basis functions
b0 =
b1 =
b2 =
b3 =
Gram-Schmidt process to obtainOrthonormal basis functions -> Legendre polynomials
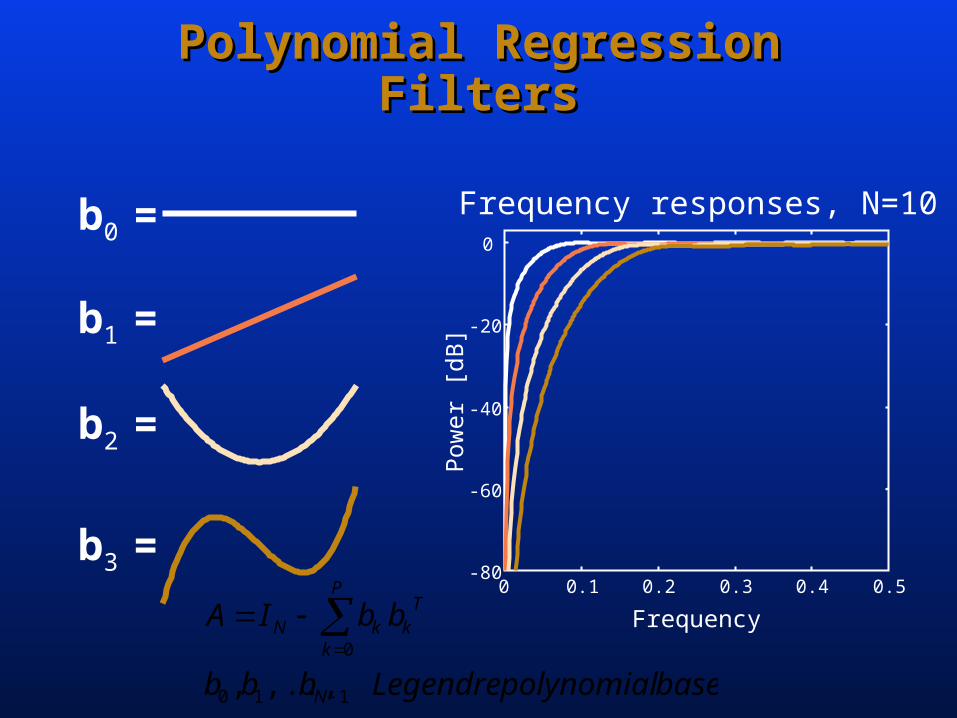
Polynomial Regression FiltersPolynomial Regression Filters
b0 =
b1 =
b2 =
b3 =
Pow
er [
dB]
Frequency
0 0.1 0.2 0.3 0.4 0.5-80
-60
-40
-20
0
Frequency responses, N=10
basepolynomialLegendrebbb
bbIA
N
P
k
TkkN
110
0
,..,,
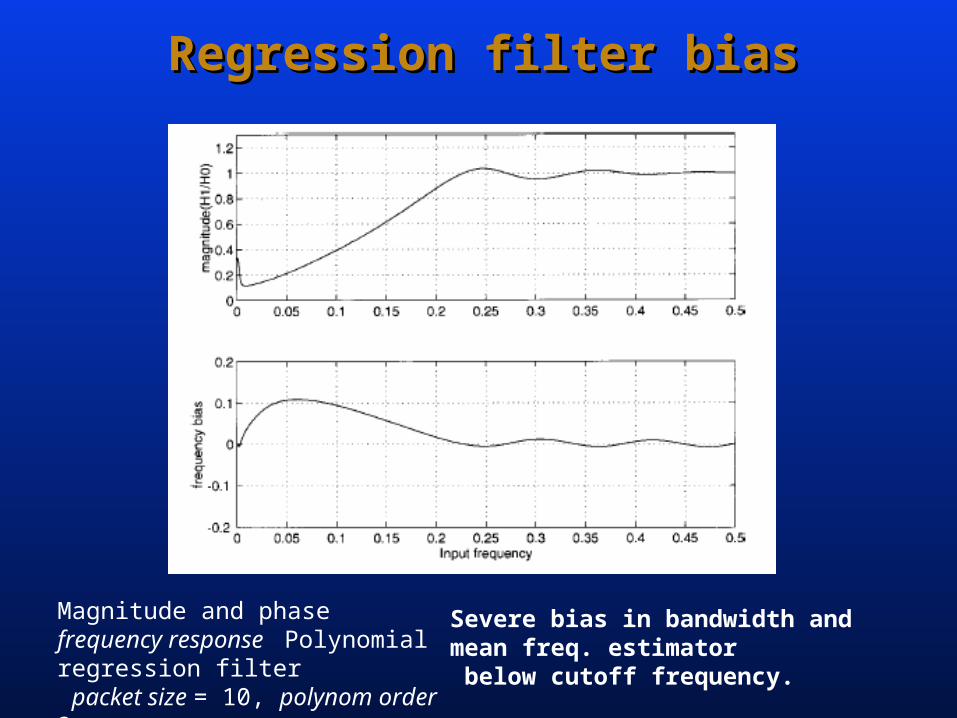
Regression filter biasRegression filter bias
Magnitude and phase frequency response Polynomial regression filter packet size = 10, polynom order 3.
Severe bias in bandwidth and mean freq. estimator below cutoff frequency.
How to image low velocity flowHow to image low velocity flow
• Long observation time neededLong observation time needed
• Obtained by increased packet size or lower PRFObtained by increased packet size or lower PRF
• Beam interleaving permits lower prf without loss in Beam interleaving permits lower prf without loss in framerateframerate
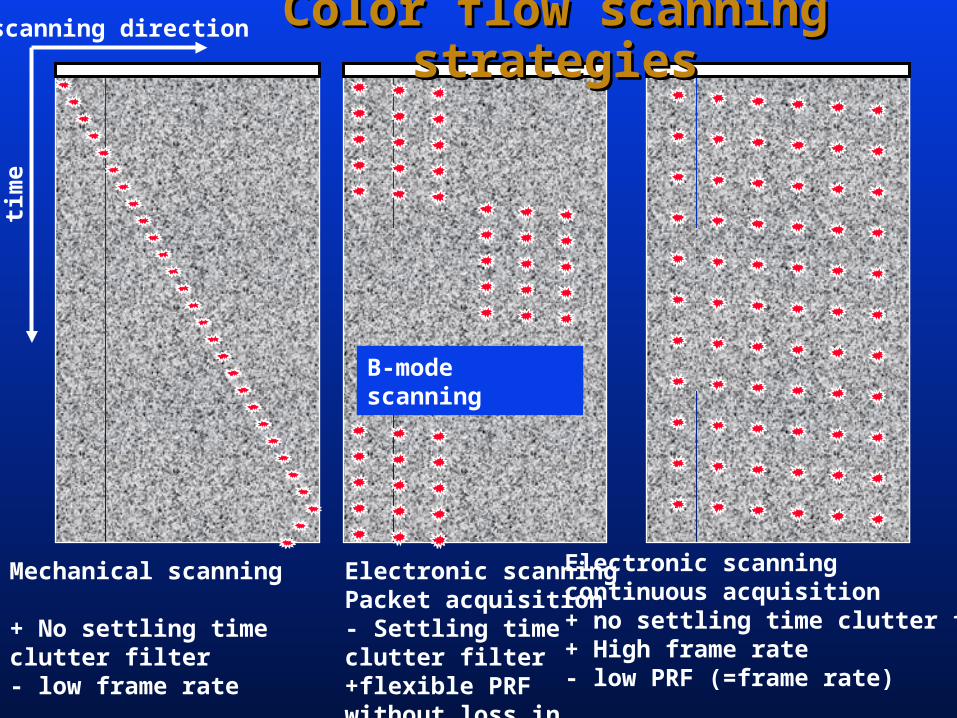
Color flow scanning strategiesColor flow scanning strategies
B-mode scanning
Mechanical scanning
+ No settling time clutter filter- low frame rate
Electronic scanning Packet acquisition- Settling time clutter filter+flexible PRF without loss in frame rate
Electronic scanning continuous acquisition+ no settling time clutter filter+ High frame rate- low PRF (=frame rate)
scanning directionti
me
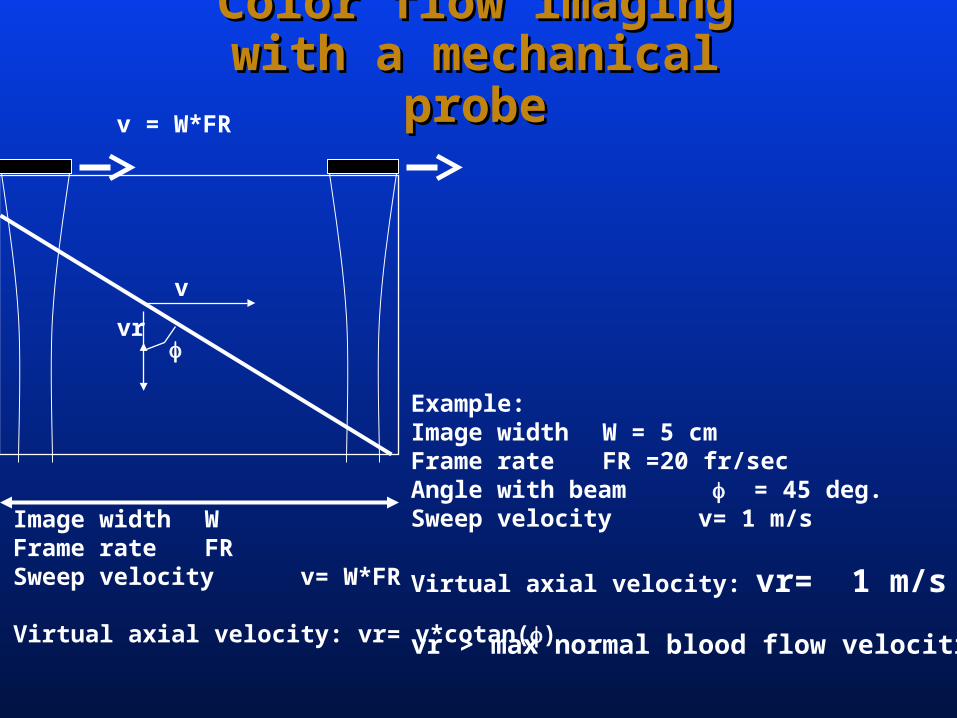
Color flow imaging with a Color flow imaging with a mechanical probemechanical probe
v = W*FR
Image width WFrame rate FRSweep velocity v= W*FR
Virtual axial velocity: vr= v*cotan()
vr
v
Example:Image width W = 5 cmFrame rate FR =20 fr/secAngle with beam = 45 deg.Sweep velocity v= 1 m/s
Virtual axial velocity: vr= 1 m/s
vr > max normal blood flow velocities!
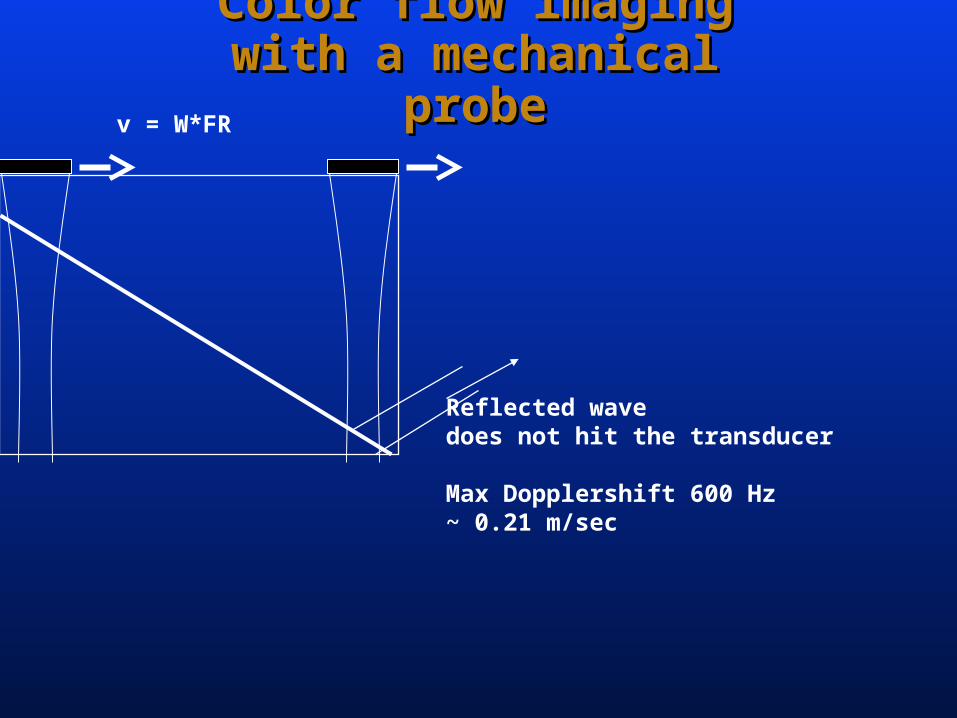
Color flow imaging with a Color flow imaging with a mechanical probemechanical probe
v = W*FR
Reflected wavedoes not hit the transducer
Max Dopplershift 600 Hz~ 0.21 m/sec
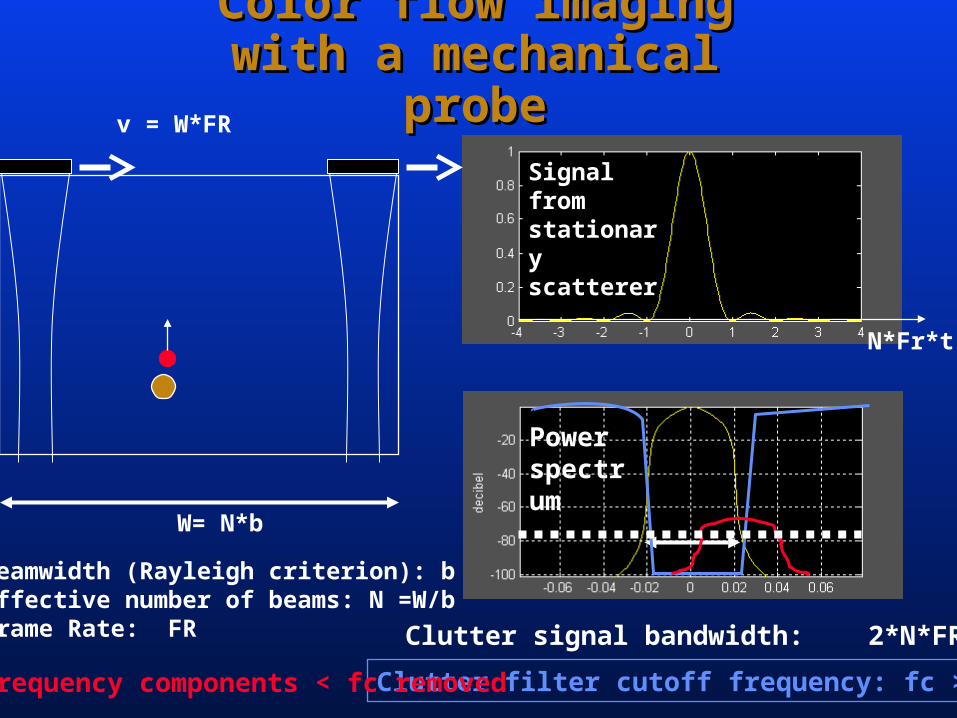
Color flow imaging with a Color flow imaging with a mechanical probemechanical probe
W= N*b
v = W*FR
Beamwidth (Rayleigh criterion): bEffective number of beams: N =W/bFrame Rate: FR
Signal from stationary scatterer
N*Fr*t
Clutter signal bandwidth: 2*N*FR
Power spectrum
Clutter filter cutoff frequency: fc > N*FR Frequency components < fc removed
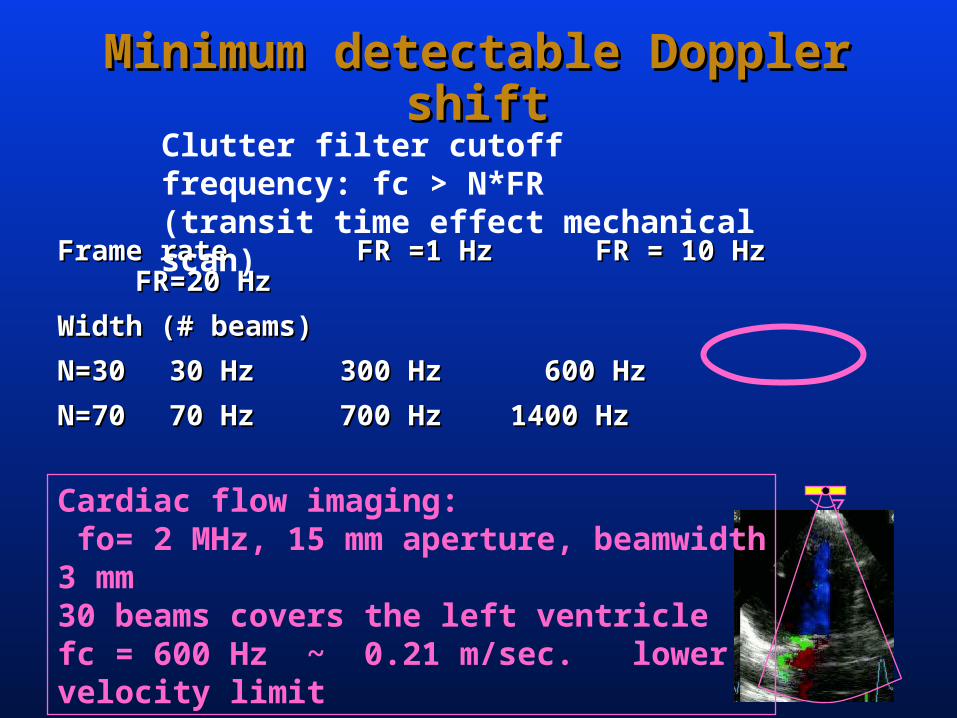
Minimum detectable Doppler shiftMinimum detectable Doppler shift
Frame rate Frame rate FR =1 Hz FR =1 Hz FR = 10 Hz FR=20 Hz FR = 10 Hz FR=20 Hz
Width (# beams)Width (# beams)
N=30N=30 30 Hz30 Hz 300 Hz300 Hz 600 Hz 600 Hz
N=70N=70 70 Hz70 Hz 700 Hz700 Hz 1400 Hz1400 Hz
Clutter filter cutoff frequency: fc > N*FR(transit time effect mechanical scan)
Cardiac flow imaging: fo= 2 MHz, 15 mm aperture, beamwidth 3 mm30 beams covers the left ventriclefc = 600 Hz ~ 0.21 m/sec. lower velocity limit
Atlanta, GA april 1986Atlanta, GA april 1986
Vingmed, introduced Vingmed, introduced CFMCFM The first commercial The first commercial
colorflow imaging scanner colorflow imaging scanner with mechanical probewith mechanical probe
Horten, Norway Horten, Norway september 2001september 2001
GE-Vingmed closed down GE-Vingmed closed down production line for production line for CFMCFM
after 15 years of continuous after 15 years of continuous productionproduction
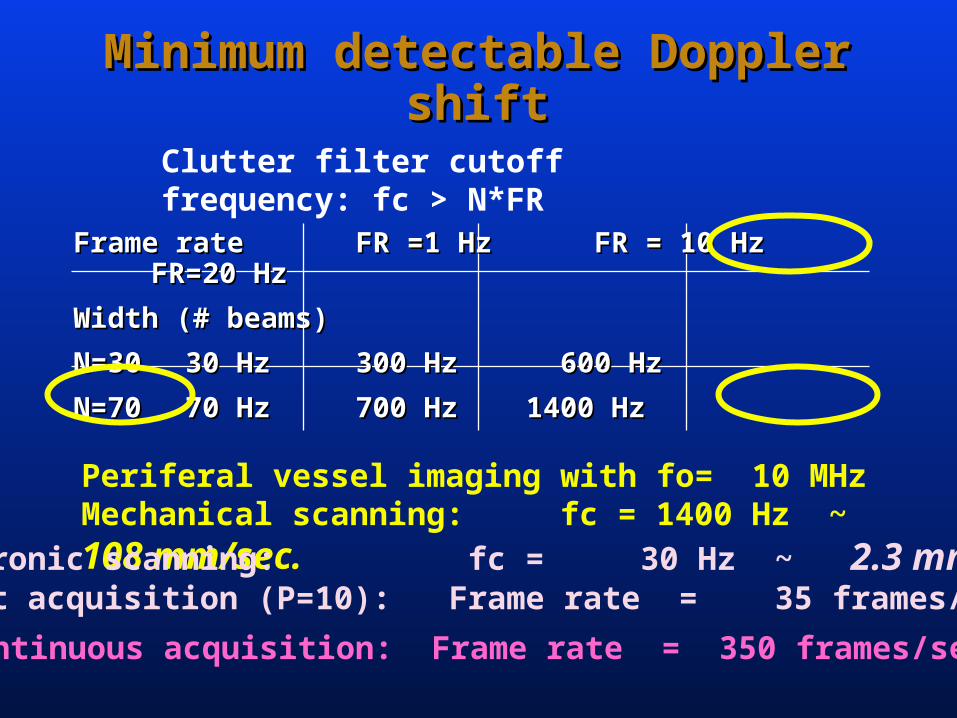
Minimum detectable Doppler shiftMinimum detectable Doppler shift
Clutter filter cutoff frequency: fc > N*FR
Frame rate Frame rate FR =1 Hz FR =1 Hz FR = 10 Hz FR = 10 Hz FR=20 Hz FR=20 Hz
Width (# beams)Width (# beams)
N=30N=30 30 Hz30 Hz 300 Hz300 Hz 600 Hz 600 Hz
N=70N=70 70 Hz70 Hz 700 Hz700 Hz 1400 Hz1400 Hz
Periferal vessel imaging with fo= 10 MHzMechanical scanning: fc = 1400 Hz ~ 108 mm/sec. Electronic scanning: fc = 30 Hz ~ 2.3 mm/sec.
Packet acquisition (P=10): Frame rate = 35 frames/sec
Continuous acquisition: Frame rate = 350 frames/sec
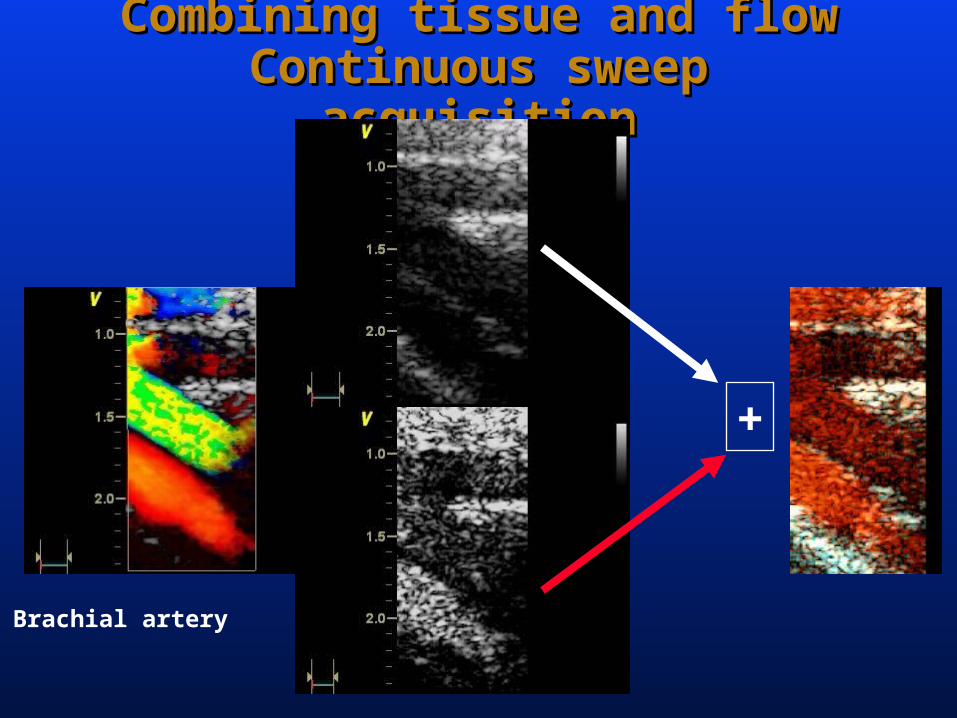
Combining tissue and flowCombining tissue and flowContinuous sweep acquisitionContinuous sweep acquisition
+
Brachial artery





























