-
8/3/2019 Transmission - Synchronization Design
1/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
Synchronization Design
1 of 14
-
8/3/2019 Transmission - Synchronization Design
2/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
1. Overview
Synchronization is a fundamental component of an optimally
performing network. Synchronizationnetworks provide timing signals
to all synchronization network elements at each node in a digital
network.These timing signals are traceable to a highly accurate PRS
(Primary Reference Source) clock ofStratum 1 quality with frequency
accuracy of 10-11 or better. The aim is to ensure that all
outgoingtransmissions from a digital network node have the same
average frequency. Buffer elements are usedat important
transmission interfaces to absorb differences between the average
local frequency and theactual short-term frequency of incoming
signals, which may be affected by phase wander and
jitteraccumulated along the transmission paths.
The very nature of digital communications is based on clocking
signals. All digital signals require someform of clocking.
Sampling, multiplexing, accessing and transportation of digital
data are all dependent on
changes based on prescribed time intervals. Digital switches,
digital cross-connect, multiplexers anddigital transport systems
are all linked for the sole purpose of reliable communications. All
of these piecesmust mesh with respect to time in order to get the
right information sampled, switched, transported andreceived.
Network synchronization is a method of achieving:
A common clock rate for the elements making up the network
and;
Ensuring that transmission impairments impacting synchronization
between nodes be kept to aminimum.
In addition to synchronizing the clock rates at the transmit and
receive ends, the links connecting both
ends must be designed to minimize timing impairments such as
jitter and frequency wander. The qualityof the transmission
facilities for transporting traffic or synchronization data is
dependent on the degree ofalignment between the transmit and
receive clocks. The higher the degree of alignment the better
theerror performance. As the degree of alignment degrades, the
rates of operation at the transmit andreceive nodes start to
differ. The end result of this difference in rates is a loss or
repetition of bits or bytesof information. This event is defined a
slip.
Digital communications relies on the use of data buffers to
account for differences in clock rates betweenthe transmitted and
received data. As the difference increases, the amount of buffer
capacity consumedgrows. If the difference is too great for the
buffers, then an overflow occurs resulting in a slip condition.
The impact of slip degradation on different services are shown
in the following table:
Service Observed effectVoice Occasional audible clicks
Voice band data Serious degradation, with some modems needing up
to 6 secondsto recover from a slip
Fax Each slip causes compression or blank lines
Encrypted voice Serious degradation requiring retransmission of
the encryption key
Compressed video Serious degradation resulting in freeze frames
or missing lines
Packet data Loss of packets, resulting in degraded throughput
andretransmission delays
Table 1: Impact of slips
2 of 14
-
8/3/2019 Transmission - Synchronization Design
3/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
In the PDH environment, the classical mechanism for passing
synchronization through a telecom networkis to use the TS0 (Time
Slot 0). In order to overcome slip problems in the PDH networks,
SDH employs acontainer structure to move the traffic through the
network. This considerably reduces the impact of
poorsynchronization on the efficiency of the transmission network
and correspondingly improving thethroughput of applications. As the
containers realign themselves within the transmission layer, they
injectphase hits onto the synchronization layer. The result is that
TS0 in an E1 delivered over an SDH networkwould be susceptible to
phase hits if the network is to become badly behaved and experience
pointeradjustments. Any applications dependent on a clean, stable
wander-free TS0 is potentially at risk.
A synchronization problem exists in two distinct forms:
Non-systematic, i.e. spontaneous and unpredictable: As the
virtual container is moved around toaccommodate anomalies in
transmission, TS0 experiences either VC-4 or VC-12 phase hits.
VC-
4 pointers occur if the virtual container is in the higher level
and VC-12 pointers occur if thevirtual container is in the lower
level. VC-4 pointer adjustments have less of an impact thanVC-12,
being 160 nanoseconds rather than 3.57 microseconds.
Systematic (i.e. regular and continuous) phase transients are
created within the variousequipment elements in a telecom network
by either the phase locked loop behaviour of the clockrecovery
circuit or the effects of buffer correction activity.
Both types of noise will be a problem where the connected
application is expecting to see good qualitysynchronization on the
E1.
What is causing switching phenomenon? In legacy PDH networks,
long term frequency drift or very long
wander build up within a network must be compensated for at the
access point. If not, it will causeproblems by filling up the
buffer and creating a slip.
Packetization delay is the delay caused by the necessity to fill
a packet before it is transmitted and isparticularly evident with
compressed voice calls associated with GSM traffic. Buffering delay
results fromthe need to maintain a real time delivery of voice
traffic across the network. The traffic must be brokendown into
packets in order to be transmitted. These packets must then be
reassembled in order toreproduce (emulate) the original voice call.
This delay can often be considerable and if it is not
carefullycontrolled can cause problems with CBR traffic such as
voice over ATM. However the controlmechanism, i.e. the buffer
imposes its own effect on the E1, experienced as the frequency
switching.
2. Synchronization Elements and Standards
The digital switch is made up of timed elements which may
consists of cross connects, multiplexers andgateways. The
deployment of these devices is based on the need to transport and
route traffic amongst anetwork of telecommunications nodes. The
network design for these elements is a function of access,traffic
patterns, carrier boundaries and circuit performance criteria.
The circuit performance criteria is predicated on a maximum
allowable level of jitter and wander. Theamount of network jitter
and wander present is dependent on the type of clocks used and the
criteria fornetwork design. Choosing the right type of clock is the
first step in providing a solid infrastructure for thetimed network
elements.
Master-slave synchronization uses a hierarchy of clocks in which
each level of the hierarchy issynchronized with reference to a
higher level, the highest level being the PRC.
3 of 14
-
8/3/2019 Transmission - Synchronization Design
4/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
The hierarchical levels are shown below:
The PRC (G.811) may be realized as an autonomous clock operating
independently of any othersources, or as a non-autonomous clock
disciplined by a UTC derived precision signal receivedfrom a radio
or a satellite system. Currently these requirements can be met with
either a cesiumbeam system or a GPS receiver system. Cesium
standards are a standalone, highly reliablestratum 1 PRC and
provide signal accuracy exceeding the stratum 1 minimum
requirement.Cesium is easy to install and turn up when rapid
deployment is critical. Minimum training isrequired because it is
self contained and simple to operate and maintain. GPS is a
reliable PRCbut is dependent on satellite visibility to provide
stratum 1 accuracy. The GPS technology doesprovide the service
provider time of day using the Network Time Protocol (NTP) since
the GPSsystem is traceable to UTC.
The SSU (G.812) serves as the slave clock in timing nodes that
are referenced to an upstreammaster clock. The main purposes of the
SSU are:
o Reference selection: typically more than one source feed is
made available to the SSU.
The SSU must be able to select a reference based on priority,
validation, SSM orcombinations thereof;
o Source validation: performance monitoring of the reference
signals in order to
determine the quality of the best available reference;
o Holdover: in the event the reference inputs fail, the SSU must
maintain an output of a
specified accuracy over a defined timeframe. This feature is a
function of the internalclocks within the SSU.
o Filtering: the output from the SSU must be impervious to any
input signal variations. The
typical parameters which the SSU will filter are jitter and
wander accumulation.
The SSU has tree main components: inputs, clocks and outputs.
Usually the SSU isconfigured with at least 2 input cards for
redundancy. This provides the SSU system withmultiple reference
input sources and can be of great benefit for performance
monitoring andmaintenance.The SSU can distribute multiple outputs,
different signal types, and provide outputredundancy. Most
manufactures of SSU equipment can provide hundreds of outputs
fromthe system, where the most common output type are E1 and 2048
MHz.
SDH network element clock (SEC) G.813
About Network Time Protocol (NTP):
NTP is a protocol that devices can use to obtain accurate time
of day (TOD). Accuracy istypically within nanoseconds of UTC.
NTP is transmitted on top of TCP/IP
Two operational modes: Client/Server and Broadcast
Most time servers are GPS
If synchronization is not guaranteed, considerable degradation
in network function, and eventotal failure of the network can be
the result. To avoid this worst case scenario, all network
elementsneed to be synchronized to a central clock. This central
clock is generated by a high precision PrimaryReference Clock (PRC)
unit conforming to ITU-T G.811 (accuracy of 10-11). This clock
signal must be
4 of 14
-
8/3/2019 Transmission - Synchronization Design
5/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
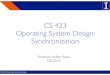
distributed throughout the entire network. A hierarchical
structure is used for this; the signal is passed onby the
subordinate Synchronization Supply Units (SSU) and Synchronous
Equipment Clock (SEC).
PRC
G.811
SSU
G.812
SSU
G.812
SEC
G.813
SEC
G.813
SEC
G.813
SEC
G.813
Figure 1: Synchronization hierarchy
The clock signal is regenerated in the SSU and SEC with the aid
of phase-locked loops. If the clocksupply fails, the affected
network element switches over to a clock source with the same or
lower quality,or if this is not possible, it switches to hold-over
mode.
3. Rules
The SDH frame synchronization method uses a technique called
pointer adjustments. The pointer is anaddress field that tells the
multiplexer where the VC is located within the overall frame.
Adjusting thepointer address to inform the multiplexer that the VC
position has moved can rectify any real delays thatoccur over the
network. The pointer addresses are moved in blocks of 3 bytes, so
each pointermovement adds 3 unit intervals of jitter onto the
system.
A maximum of 15 NE from the PRC can be daisy-chained until it
needs to be filtered to thestability set in G.812. After 60 NE, the
clock source must be regenerated to achieve a G.811standard.
External synchronization equipment, often GPS or Cesium based,
is used to achieve this in a network.
ADM/DXC systems must meet the objectives laid down by G.813.
However, in practical synchronization network design, the number
of network elements in tandemshould be minimized for reliability
reasons.
It is recommended that all node clocks and network element
clocks are able to recover timing
from at least two synchronization distribution trails. The slave
clock must reconfigure to recovertiming from an alternative trail
if the original trail fails.
5 of 14
-
8/3/2019 Transmission - Synchronization Design
6/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
In the event of a failure of synchronization distribution, all
network elements need to recovertiming from the highest
hierarchical level clock source available.
To effect this, both G.812 and G.813 clocks may have to
reconfigure and recover timing from one of theiralternate
synchronization distribution trails. This will ensure that a SDH
network element clock-timednetwork element rarely enters holdover
or free-run mode. However, it may have to recover timing from
aG.812 clock which is itself in holdover if this is the highest
hierarchical level source available to it.
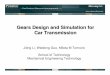
To provide an example of a reconfiguration, if the first network
element from the PRC loses itssynchronization trail from the PRC,
it must reconfigure and accept timing from the G.812 slave
clock.This is shown in the following figure:
G.811 clock
1st NE
G.812 clock
2nd NE
Nth NE
Timing
propagation
G.811 clock
1st NE
G.812 clock
2nd NE
Nth NE
Timing
recovery
Before
recovery
After
recovery
Figure 2: Synchronization reconfiguration example
4. PDH and SDH interworking
In many scenarios, there is a need to carry a PDH payload across
multiple SDH islands. There is noabsolute guarantee that every PDH
multiplex chain will accept the output jitter appearing at the
SDH/PDHboundary. This is because there is no specified lower limit
to the corner frequency of the PDHdemultiplex transfer
characteristic.
5. Mobile Base Stations synchronization requirements
A GSM BTS requires 5 x 10-8. A 3G NodeB requires 2 x 10-8.
Transmission Transmission
BSCBTS Retimer
GPS or Line Sync
6 of 14
-
8/3/2019 Transmission - Synchronization Design
7/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
6. Benefits of a synchronized network
The overall performance of a digital network is directly related
to the degree of synchronization amongstthe network elements and
nodes. Among the many benefits of a properly planned
synchronizationnetwork, the following are the most prominent:
Minimizes the number of frame slips on TDM (Time Division
Multiplexed) telecom networks
Minimizes jitter, suppresses short term instabilities and wander
resulting in:
o Clean external reference to network elements
o Clean synchronization feeds to downstream networks
Improves operation between PDH and SDH networks
Fewer customer outages and complaints
7. Synchronization planning approach and consideration
In order to design and construct a network that will provide a
sound synchronization infrastructure, thefollowing attributes will
be accounted for:
Satisfactory QoS (quality of service) levels for critical
services. For example, controlling slip ratesand limiting pointer
adjustments;
Maximized reliability and redundancy with protection
schemes;
Minimize network maintenance;
Observe hierarchical top down approach;
Minimize potential timing loops;
Design a robust network where redundant and seamless protection
is available;
Minimize human interaction;
Develop a network management scheme for remote central office
management.
With these goals in mind, there are five basic planning
considerations for synchronization which isemphasized:
Maintain hierarchy
Use the SSU concept
Avoid timing loops with careful engineering and planning
Diversity: PRS and cabling diversity
Minimize cascading effect of distributed timing
7 of 14
-
8/3/2019 Transmission - Synchronization Design
8/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
Designing a synchronization network is a combination of choosing
the right clocks and placing them atlogical points in the network
to provide maximum performance and reliability.
7.1 Maintaining hierarchy
Since synchronization is the result of achieving a common
network clock rate, it is important tounderstand the various ways
this can be achieved. The objective of the synchronization network
is todistribute timing references that are traceable to a primary
reference source (PRS) in order to achieve thecommon network clock
rate. It is this concept of traceable timing that requires a
logical method ofnetworking timing nodes to ensure all nodes are
timed by the proper reference points.
Hierarchical Master Slave
In a hierarchical arrangement of clocks, the level, or quality
of clocks placed in the network is such thatthe higher level clock
always provides distribution of the reference signal to lower level
clocks. Further, itis sufficient for a site to receive timing from
an upstream site of equal type and subsequently pass it on
toanother of equal type or level.Historically, this has been the
most commonly used network synchronization technique. In
thisconfiguration, a reference or master clock is distributed to
all nodes through a tree like topology.
The master-slave synchronization network can be characterized by
the following attributes:
The network consists of hierarchical levels;
The highest level contains the master clock of the network;
The master clock provides distribution of the synchronization
reference signal to downstreamslave clocks;
The slave clocks supply timing to yet lower level clocks in the
hierarchy;
The slave clocks in level 2 will serve as a reference to the
level 3 clocks if all reference signalscoming from the master are
lost;
Synchronization is always transferred from a higher level to a
lower level to avoid timing loops;
All slave clocks should receive reference signals from multiple
sources via different paths.
Even with the advent of distributed PRS sites, care must be
taken in the inter-site distribution of thesynchronization signal.
The synchronization signal of the PRS is distributed to the SSUs
directly via aring or chain of SECs. These transport signals must
be suitable for the transport of synchronization suchthat, at the
end of the trail, it must be possible to recover the timing signal
which meets the jitter andwander limits (specified in ITU-G.823 and
G.825).
7.2 Use the SSU concept
The SSU is the key component for deploying proper
synchronization in a network. With the ability tovalidate accuracy
of an input signal and distribution to all the NE, an SSU will be
the mechanism bywhich each and every NE in a single central site
should be timed from. The SSU can be a standalonePRC, an integrated
PRC/SSU, or use a derived E1 signal.
8 of 14
-
8/3/2019 Transmission - Synchronization Design
9/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
7.3 Avoid timing loops
Timing loops occur when a clock is being referenced to itself. A
condition like this will make the networktiming drift and become
unstable and ultimately will cause slips in the network. A
potential timing loopexample is shown in Figure. In the figure,
when the synchronization output from the SSU is cut, thenetwork
will enter into a timing loop.
SSU SEC
SECSEC
SEC
Figure 2: Timing loop
7.4 Diversity
Maintaining network reliability becomes paramount compared to
the relative small cost of implementing aredundant PRC clock system
such as shown in the next figure.
GPS Cesium
Redundant PRC
Figure: Redundant PRC clock
7.5 Minimize cascading
To limit the accumulation of jitter and wander in a
synchronization distribution chain, a maximum numberof SSU
(Synchronization Supply Unit) and SEC (Synchronous Equipment Clock)
are advised not to beexceeded. The maximum number of SSU in a
single chain shall not be more than 10, and thenumber of SEC shall
not be more than 20 between SSUs, with the restriction that the
total numberof SEC within the chain is limited to 60.
9 of 14
-
8/3/2019 Transmission - Synchronization Design
10/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
This explanation is better visualized in the following
diagram:
SSU
N SEC
SSU 1
SSU
N SEC
SSU 2
SSU
N SEC
SSU K
Maximum recommendednodes:K = 10N = 20, with restriction thatSEC
clocks do not exceed60 within a single chain
Figure 3: SSU and SEC limits
However, there will be cases when some links may have more noise
and thus requires an independent
PRS source at that location. This discretion will be left up to
the designer to determine the severity andimportance of the link,
and where additional PRS and/or SSU may need to be added.
8. Synchronization deployment
Although synchronization networks are different, there are
certain constraints that every operator willagree upon, and that
is, a synchronization plan must avoid timing loops, minimizes
jitter and wander,performance of the network should be enhanced
such that yardsticks like dropped phone calls arereduced, and slip
are minimized.
In the following paragraphs, an approach to formulate a
synchronization plan will be introduced. Thisapproach adheres to
recommendations based on standards, is by no way a firm straight
and narrow
systematic scheme.
10 of 14
-
8/3/2019 Transmission - Synchronization Design
11/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
In practice, passing synchronization in networks is classified
in one of two categories, Inter-Node or Intra-Node. In an
inter-node scheme, synchronization is passed between nodes usually
by way of a transportdevice, such as via SDH. In an intra-node
scheme, synchronization is passed from a device such as anSSU to
all pieces of equipment co-located in the same site.8.1 Inter-Node
synchronization
With Inter-Node synchronization, distribution of timing from the
PRSs to the other clocks in the networkhas, for the most part, been
hierarchical. Todays digital network is characterized by a much
moredistributed versus hierarchical synchronization topology, due
to the advances in clock designs anddistribution techniques.
It is worthwhile to review the different approaches to network
synchronization, in order to fullycomprehend the effects of
synchronization. Network elements at different sites can be brought
to a
common clock rate by employing at least one of the following
topologies. The most prevalent are:
Independent PRS;
Distributed PRS;
Chains
Rings
8.1.1 Independent PRS
The independent clock approach is based on the plesiochronous
approach to network synchronizationwhere data buffers are used to
compensate for the frequency differences in the system clocks.
Highlystable atomic clock references are used at each node of the
network with a buffer large enough tomaintain a specified accuracy
over a pre-determined period. Conceptually, independent clocks
constitutethe simplest of all techniques for network
synchronization. The chief advantage lies in systemsurvivability,
where link degradation, or failure of one node does not affect
other nodal clocks.
PRS 1
PRS 3
PRS 2
NETransmission
link
Transmissionlink
Transmissionlink
NE
NENE
Figure 4: Independent clock synchronization concept
11 of 14
-
8/3/2019 Transmission - Synchronization Design
12/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
8.1.2 Distributed PRS
A distributed PRS approach actually combines the attributes of
the hierarchical and independent clockmethods. This technique
involves the deployment of multiple PRS types at the same site in
an effort toflatten the distribution hierarchy.
The distributed PRS approach has several advantages:
It reduces the complexity of the planning effort, i.e. simpler
distribution topology;
Provides for increased performance and reliability;
Provides an opportunity for multiple alternate references
(timing diversity) and supports an active
surveillance capability;
Can be used to establish fail-safe timing to SDH ring
architectures, independent of softwarebased message techniques;
8.1.3 Chain
Synchronization signals can be transported between network nodes
via synchronization chains withclock-transparent paths (2 Mbit/s
paths) being preferred. The 2 Mbit/s data signals which are part of
theSDH payload are not suitable as reference timing signals.
The main requirements for inter-node synchronization are:
Transportation of synchronization signals between node clocks
must maintain jitter and wanderperformance requirements. In
principle, a maximum number of 20 SECs in a chain between twoSSUs
will meet the requirements. In practice however, long chains are
discouraged and arelimited to 4 to guarantee performance
margins;
SDH NEs require alternative synchronization trails be
established in case of distribution linkfailures. Reconfiguration
scenarios can be based on SSM (Sync Status Messaging) schemes,which
will be explored shortly.
Under normal operation the synchronization information is
transported from SSU 1 which is assumed tobe synchronized to a PRS,
to SSU 2 via a chain of NEs containing an SEC clock.
Under normal operation the network elements between SSU 1 and
SSU 2 perform the following tasks inthe transport of
synchronization:
NE 1: Generate a transport signal whose timing is derived from
the upstream SSU which issynchronized to a PRS;
NE 2.n-1: Recover the clock from the incoming transport signal
and use it as reference for theSEC. The timing of the outgoing
transport signals is derived from the SEC clock;
NE n: Recover the clock from the incoming transport signal and
generate a reference signal forthe SSU.
In order to keep a lower quality clock from timing a higher
quality clock, the reference output signal issquelched when the
quality falls below the SSU level (or in some cases, below the PRC
level). For that
12 of 14
-
8/3/2019 Transmission - Synchronization Design
13/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
purpose, certain signal criteria must be supervised and the
quality information in the SSM is evaluated, ifSSM processing is
supported and enabled in the NE.
Alternatively if SSM is not used during a failure, the NEs in
the chain are programmed to acceptsynchronization from the
downstream SSU, reversing the direction of synchronization
transport up to thepoint of the fault, as shown in the diagram. One
important point to add to this scenario is that thedownstream SSU
must have a higher quality clock than the SEC internal clocks,
otherwise hierarchyprinciples will be violated.
8.1.4 Rings
Synchronization rings are typically made up of two parallel
chains between SSUs, as shown in thefollowing figure. The
synchronization signal is injected into the ring at one of the NEs
of the ring via the
external reference input and transported through one of the SDH
transport chains. At some other NE ofthe ring the reference signal
is recovered and passed to the downstream SSU.
A ring creates additional or different synchronization
properties, compared to the chain:
Using automatic reconfiguration mechanisms, each NE in the ring
can be reached from theupstream SSU via two synchronization trails.
Therefore it is not necessary to injectsynchronization from the
downstream SSU into the ring, even under many failure conditions
asshown in the previous diagrams;
The downstream SSU can be synchronized via either of the chains,
i.e. via two alternativesynchronization trails. There are two
single points of failure, the gateway NEs to the SSUs.Those can be
eliminated by injecting and extracting the synchronization signal
at two NEs.
Measures must be taken to avoid timing loops around the ring
under certain failure conditions inconnection with automatic
reconfiguration. One method is to not close the ring. As shown in
thediagram, the SEC clock with the red highlight does not provide a
sync reference to the adjacentSEC, thereby not closing the
ring.
Another method to avoid timing loops is to use SSM which is
explored next.
SSM Synchronous Status Messaging
SSM evolved as a method to transport the quality of a
synchronization signal utilizing a message to
identify the state of the sync signal in order to avoid timing
loops and for auto restoration of the syncnetwork when the original
sync signal is lost. Or to describe it simply, usage of SSM will
allow an SSU ora NE to select the best available sync signal based
on the sync quality messge.
ETSI and ITU have standardized on a SSM messaging scheme to
enable this feature. The SSM is codedin the S1 byte of the STM-N
section overhead reflecting the SSM quality message.
The fundamental strategy behind SSM is when a timing failure
occurs, the network elements now havethe ability to take an
alternate timing reference signal based upon the quality level
message that isavailable at its input and auto correct itself.
Further the network element will relay this information to its
downstream network element.
13 of 14
-
8/3/2019 Transmission - Synchronization Design
14/14
SerieGuidelines
Title74111877.doc
Date20/10/2006
DepartmentTechnical/Engineering
ServiceTransmission
8.2 Intra-Node synchronization
In an intra-node synchronization distribution, the
synchronization reference provide a reference signal toall
co-located network elements i.e., same site. The reference signals
are generated in a node clockwhich is usually a SASE (StandAlone
Synchronization Equipment).
Although some NEs feature an embedded SSU, the SASE
implementation is preferred from a planningand maintenance
perspective. The SASE is synchronized to a reference signal coming
from a PRS viainter-node synchronization transport. [TRANS-SYNC] It
is recommended that intra-node synchronizationdistribution is in
the form of a logical star.Properties and functionalities for
intra-node synchronization:
Dedicated signals for synchronization transport to and from the
node clock:o
2048 kHz (G.703)o 2048 kbit/s (G.703)
o 2048 kbit/s (G.704) supporting SSM
For robustness against faults in the synchronization transport
several transport signals arriving atthe node are selected as
potential reference sources;
Ensure that the reference signal at the inputs of the node clock
is sufficient. This can be achievedin several ways:
o Squelch the reference output at the NE if the quality
indicated by the SSM message in
the incoming traffic signal is below a threshold message. The
threshold must not belower than the quality of the node clock (in
holdover mode, i.e. SSUT). Additionally othersupervision criteria
like Loss of Signal, Loss of Frame etc can be used for
squelching;
o Sync signals at the inputs of the node clock with respect to
frequency deviation, phasejumps, can be measured with performance
monitoring from the SSU.
Collect the quality information of the NEs in a management
system and select the best signal atthe node clock by management
command. This solution requires that the NEs and the nodeclock can
be accessed from a common management system;
Provide an SSM message for the STM-N signals leaving the node.
In order to insert the correctvalue it is necessary to have the
information about the quality of the reference signal in use at
thenode clock;
If the intra-node synchronization distribution is accomplished
via 2048 kHz signals, the only way
to transport information is squelching the signal dependent of
some supervision criteria;
If 2048 kbit/s signals supporting SSM are used for intra-node
synchronization, the qualityinformation can be forwarded using the
SSM message. This solution requires that all involvedpieces of
equipment have 2048 kbit/s reference inputs and outputs also
support SSM.
If none of the enumerated options are available, a fixed SSM
message must be inserted into theSTM-N signals leaving the node.
The assignment of the appropriate SSM message is a task forthe
synchronization planner.
The synchronization signal can be transported between network
nodes via synchronization chains withclock-transparent paths (2
Mbit/s path) being preferred. The 2 Mbit/s signals which are part
of the
SDH payload are not suitable as reference signals because they
are subject to wander caused bypointer adjustments.
14 of 14