Embed Size (px)
Citation preview

THIC – 8/22/071
Presented at the THIC Meeting at the National Center for Atmospheric Research, 1850 Table Mesa Drive, Boulder CO
80305-5602 August 21-22, 2007
Transition from AMR to GMR Headsin Tape Recording
John P. NibargerSun Microsystems
1450 Infinite Dr., Louisville CO 80027-9440Phone: +1-303-661-2837 FAX: +1-303-661-8992
E-mail: [email protected]

THIC – 8/22/072
• Basics of magnetic recording> AMR (Anisotropic Magneto-Resistance)> GMR (Giant Magneto-Resistance)
• Transition in disk from AMR to GMR• Issues surrounding the transition from
AMR to GMR in tape
Outline

THIC – 8/22/073
*
*Using a peak detect channel
Head writes datato media
Media stores data
Head reads data from media
Channel convertsanalog signal to digital user data
Channel convertsdigital user data to
analog signal
Digital Magnetic Recording

THIC – 8/22/074
• Allow system to resolve changes in the magnetic media which stores the user information
• Two types in magnetic recording> Inductive: Faraday’s Law ( )> Magneto-Resistive (MR): electric resistance of the
sensor changes with applied magnetic field
t∂∂−=×∇ BΕ
Rotation of the magnetization in a MR sensor gives rise to a resistivity change (∆ρ)
( )θρρρ f⋅∆+= 0
tdwIRIV ⋅∆⋅=∆⋅=∆ ρ
Magnetic layer
Magnetic sensor
Magnetic flux
Magneticmoment
wd
t
Magnetic Read Sensors

THIC – 8/22/075
• Inductive> A variable magnetic field from the media will induce a variable
voltage in a coil• Anisotropic magneto-resistance (∆ρ/ρ ~ 2% in Ni80Fe20)
> Bulk effect in ferromagnetic materials• Giant magneto-resistance (∆ρ/ρ ~ 20% in Co/Cu/Co)
> Interface effect in thin multilayers• Tunneling giant magneto-resistance (∆ρ/ρ ~ 250% in Co/MgO/Co)
> Coherent tunneling effect across an insulator
GMR
Tape
Disk
Inductive AMR GMR
Inductive AMR TMR
1985 2010 ??
1992 1997 2006IBM Corsair IBM Deskstar 16GP Seagate Momentus II
IBM 3480
Tape and Disk Sensor Technology

THIC – 8/22/076
• Tape area – width (½”) and length (900 m)> ~ 18,000 in2
• Disk area – area of a platter and number of platters> ~ 8 in2 for 1 single-sided platter
Direction of media travel
Tracks per inch (tpi)
bits per inch (bpi)
Areal density (bits/in2) = tpi· bpi
shieldssensor
Magnetic Recording

THIC – 8/22/077
0.01
0.1
1
10
100
1000
1990 1995 2000 2005 2010 2015 2020
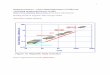
Disk ProductTape ProductTape INSIC Roadmap
GMR
Tape
Disk
Inductive AMR GMR
Inductive AMR TMR1985 2010 ??1992 1997 2006
Year of Introduction
Area
l Den
sity
(Gb/
in2 )
INSIC EHDR demo goal
16 TB
2 TB

THIC – 8/22/078
• Anisotropic Magneto-Resistance (AMR) is a bulk effect in Permalloy (Ni80Fe20) and other ferromagnetic materials> Optimum bias at 45 degrees
( ) ( )20 cosAMRH Hρ ρ ρ θ= + ∆
current
magnetization
θ
AMR:
Goal is to offset the bias field
Vary field with tape
Rectified SensorOutput
R
H
Vary field with tape
SensorOutput
R
H
AMR Response

THIC – 8/22/079
Cap
Sensor
Soft Adjacent Layer(SAL)
Spacer
SubstrateSeed
45 – 80 nm
25-45 nm
7-12 nm
15-25 nm
Cap
Ni80Fe20
Co90Zr5Mo5
Ta
SubstrateSeed
AMR Sensor Stack Materials

THIC – 8/22/0710
• AMR is a good sensor (and still used by tape)
• BUT, it has a problem. Output decreases as sensor thickness decreases
• Why has sensor thickness decreased over time?
Tape head AMR layerthickness and year of Sun/STK product introduction
0
5
10
15
20
0 100 200 300 400 500 600
∆R/R
(%)
Sensing Layer Thickness (Angstroms)
AMR
2006 2003 1999 1993
Why Switch from AMR?

THIC – 8/22/0711
Magnetic sensor
Magnetic flux
Magneticmoment
Tape magnetic layer
Tape substrate
Thick media → low density → lots of fluxThick sensor to match flux
Thin media → high density → less flux Thin sensor to match flux
Sensor for higher densities:1. Thinner sensor (for thinner media)2. Higher sensitivity (to make up for
reduced flux)
Achieving Higher Densities

THIC – 8/22/0712
Thinning the sensor allows higher density BUT the signal goes down!
Want something that can increase output with decreasing sensor thickness
0
5
10
15
20
0 100 200 300 400 500 600
∆R/R
(%)
Sensing Layer Thickness (Angstroms)
AMR
2006 2003 1999 1993
Decreasing Thickness Penalty in AMR

THIC – 8/22/0713
AMR is a bulk effect, interfacial scattering takes over at small thicknesses
GMR is an interface effect
0
5
10
15
20
0 100 200 300 400 500 600
∆R/R
(%)
Sensing Layer Thickness (Angstroms)
GMR
AMR
Advantage of GMR

THIC – 8/22/0714
Pinned Layer
Free Layer
Non-magnetic Spacer
Anti-aligned momentsHigh Resistance
Pinned Layer
Free Layer
Non-magnetic Spacer
Aligned momentsLow Resistance
GMR – Spin Dependent Scattering

THIC – 8/22/0715
( ) ( )0 sinGMRH Hρ ρ ρ θ= + ∆
• GMR is an interface effect> Bias at 0 degrees R
esistanceFree
Pinned
pinned
Cu spacer
Applied Field
Vary field with tape
SensorOutput
Vary field with tape
SmallSensorOutput
GMR:
Goal is to zero the bias field
R
H
R
H
free
GMR Response

THIC – 8/22/0716
• GMR structures act as a spin valve> Resistance depends on direction of applied
magnetic field on the sensor
• 3 important components> Free layer
> Well behaved> Properly oriented and biased
> Non-magnetic spacer > Interface properties are important
> A solid pinned layer> Won’t move with field from tape
Cap
Free Layer
Pinned Layer
Non-magnetic spacer
SubstrateSeed
How Do We Make These Structures?

THIC – 8/22/0717
Cap
Co90Fe10
Seed
Cu
Substrate
Pt50Mn50
Co90Fe10
Ru (10 Ǻ)
Ni80Fe20
Co90Fe10
Cap
Free Layer
Pinned Layer
Spacer
SubstrateSeed
Ru atomic radii ~ 2.6 Ǻ 10 Ǻ
5-15 nm
2-3 nm
10-40 nm
magnetization
Ǻ = 10-10 m
GMR Sensor Stack Materials

THIC – 8/22/0718
-2000
0
2000
4000
6000
8000
10000
12000
-10 -5 0 5 10
Ibias (mA)Pe
ak to
pea
k vo
ltage
(uV)
GMR 5 um reader 1.5 um stripeGMR 2.5 um reader 1.3 um stripeGMR 1 um reader 1 um stripeAMR 5 um reader 1.6 um stripe
100
1000
10000
100000
0 2500 5000 7500 10000 12500 15000density (frmm)
Vpp
(uV)
NGD-B
NGD-C 41 (1 um stripe)GMR prototype sensorAMR sensor
5 µm reader width comparison
( )( )
9% 4.52%
GMR
AMR
RR
RR
∆= =
∆
frmm = flux reversals per mm
GMR at Sun

THIC – 8/22/0719
• Providing leading edge head technologies for Enterprise, Mid-Range, and Low-End tape drive products.> Sun Microsystems T10000 and 9x40 product lines; LTO2-LTO4> The first thin film helical scan read & write heads in production with VXA-3
• Developing the technology building blocks for future generation products now> GMR, increased device density, advanced materials
• Custom designed equipment technology to meet the unique requirements of tape head manufacturing> Dynamic testers, head assembly, critical dimension measurement
• State-of-the-art performance analysis capabilities to ensure product quality and competitive position> Dynamic performance, constructional analysis, magnetics analysis
Recording Head Operations at SunLouisville, CO

THIC – 8/22/0720
GMR
Gallagher and Parkin, IBM J. Res. Dev. 50, 5 (2006)
TMR
GMR to TMR

THIC – 8/22/0721www.hitachigst.com/hdd/technolo/gmr/gmr.htm
AMR to GMR Transition for IBM

THIC – 8/22/0722
AMR to GMR Transition for tape
9940B (2002), 0.2 Gb/in2 (200 GB)
T10000 (2006), 0.4 Gb/in2 (500 GB)
INSIC (2007), 0.8 Gb/in2 (1 TB)
INSIC (2011), 2.7 Gb/in2 (4 TB)
INSIC (2009), 1.5 Gb/in2 (2 TB)
INSIC (2013), 5 Gb/in2 (8 TB)
02 04 06 07 09 11 13 15 ~ 12 year technology offset
INSIC (2015), 10 Gb/in2 (16 TB)
20xx
CGR = 40 %INSIC high bpi scenario

THIC – 8/22/0723
0.01
0.1
1
10
100
0.1 1 10 100
reader width (um)
area
l den
sity
(Gb/
in^2
)
10
100
1000
100 1000 10000 100000
tpi
kbpi
• Disk change to GMR ~ 2 - 5 Gb/in2
• Tape change to GMR ~ 1 - 2 Gb/in2
Disk - AMRDisk - GMRTapeTape (high bpi)Tape (high tpi)
2005 INSIC roadmap
Areal Density

THIC – 8/22/0724
Disk - AMRDisk - GMRTapeTape (high bpi)Tape (high tpi)
10
100
1000
0.1 1 10 100
reader width (um)
kbpi
100
1000
10000
100000
0.1 1 10 100
reader width (um)
tpi
Read width = ½ track width
• Disk change to GMR ~ 1 µm, but only at 200 kbpi• Tape change to GMR ~ 2 - 3 µm, but only at 300 - 400 kbpi
2005 INSIC roadmap
Kbpi and Tpi

THIC – 8/22/0725
1
10
100
1000
0.1 1 10 100
reader width (um)
BA
R
1
10
100
1000
0.01 0.1 1 10 100
areal density (Gb/in^2)
BA
R
BAR = bpi/tpi= W/L
L W
Tape has much higher BAR since bpi is pushed more
Disk - AMRDisk - GMRTapeTape (high bpi)Tape (high tpi)
Bit Aspect Ratio (BAR)

THIC – 8/22/0726
• Similarities> Fundamental physics of recording is identical
• Differences> Interchange is needed for tape> Disk is a “closed” environment compared to tape
> Contamination and corrosion> Tape does read while write> Area (18,000 in2 vs. 8 in2)> Rigid disk vs. flexible tape media (sputtered vs. particulate)> Number of tracks
> 32 data + 4 servo tracks in Sun T10000 drive (crosstalk is a major issue)> But disk can have lots of platters (5 two-sided disks with 10 heads)
> Manufacturing yield: tape, 36/36 with 36 tracks, disk, 1/1> (device yield)36 = head yield> (83% device yield)36 = 0.1% head yield> (99.5% device yield)36 = 83% head yield
Similarities and Differences

THIC – 8/22/0727
• GMR sensors are extremely sensitive to ESD
• Two failure modes– High temperatures melt and
fuse materials together– Moderate temperatures heat
PtMn anti-ferromagnet above it’s blocking temperature
• PtMn can reorient ~ 350º C• NiFe free layer ~ 660 º C• Cu spacer ~ 1000 º C
(Al Wallash – Maxtor Corporation)
Electro-Static Discharge

THIC – 8/22/0728
• Hard drive> Preamp on slider
• Tape > Long flex to preamp
(Al Wallash – Maxtor Corporation)
HBM
Fai
lure
Vol
tage
(V)
0
50
100
150
200
250
1990 1995 2000 2005
AMRGMR
Year
2006 Maxtor hard driveSun T10000 head, flex, and voice coil
ESD Sensitivity

THIC – 8/22/0729
• Fundamental physics will drive the transition from AMR to GMR in tape just as it did in disk> Disk migrated at 2 – 5 Gb/in2, ~ 200 kbpi, and 1 µm reader width> Tape will migrate ~ 1 – 2 Gb/in2, ~ 300 – 400 kbpi, and 2 – 3 µm
reader width• Engineering tradeoffs have pushed disk to high tpi and tape
to (relatively) high bpi due to track following issues in tape• Disk migrated to GMR successfully (and then TMR)• Tape will migrate to GMR but issues exist
> Corrosion> ESD> Media
Conclusion

THIC – 8/22/0730
Questions?

![GMR Voting System Catalog Part1 ... - download.gongkong.comdownload.gongkong.com/file/company/10490/GMRVotingSystemCatalog.pdf · c?Ô 1 1. veÄ • gmr 2Ï4³ veÄ 3 • gmr ]](https://img.pdfslide.us/doc/110x75/5bfc0ea409d3f225088bc5a1/gmr-voting-system-catalog-part1-co-1-1-veae-gmr-2i4-veae-3-.jpg)