Embed Size (px)
Citation preview

Transformations I
CS5600Computer Graphicsby
Rich Riesenfeld
27 February 2002Lect
ure
Set
5
CS5600 2
Transformations and Matrices
• Transformations are functions
• Matrices are functions representations
• Matrices represent linear transf’s
• s'TransfLinear 2Matrices22 Dx

CS5600 3
What is a 2D Linear Transf ?
Recall from Linear Algebra:
. and vectorsand ascalar for
,)()()(:
yx
yTxaTyxaTDefinition
CS5600 4
Example: Scale in x
),2(),2(),(2
:say 2,by in x, Scale
11001010 yxyxyyxx

CS5600 5
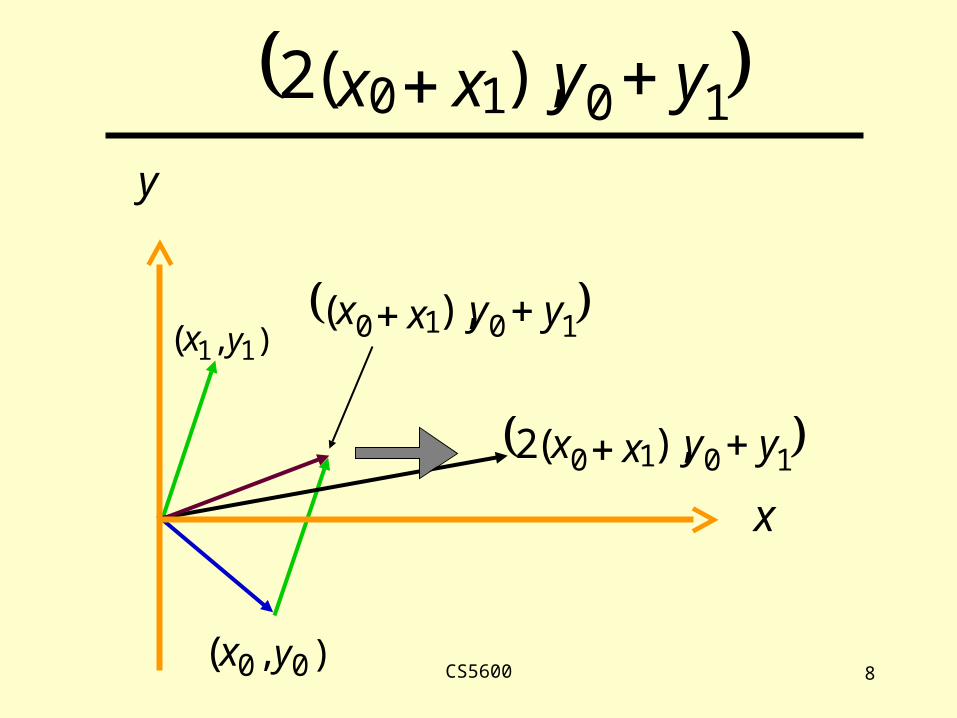
Example: Scale in x by 2
What is the graphical view?

CS5600 6
), 00( yx ), 002( yx
), 11( yx ), 112( yx
Scale in x by 2y
x

CS5600 7
x
y
), 002( yx
), 112( yx
yyxx 1010 ,22
yyxx 1010 ,22
CS5600 8
y
), 00( yx
), 11( yx
yyxx 1010 ),(2
yyxx 1010 ),(
yyxx 1010 ),(2
x
CS5600 9
y
yyxx 1010 ),(2
yyxx 1010 ),(
yyxx 1010 ),(2 y
x

CS5600 10
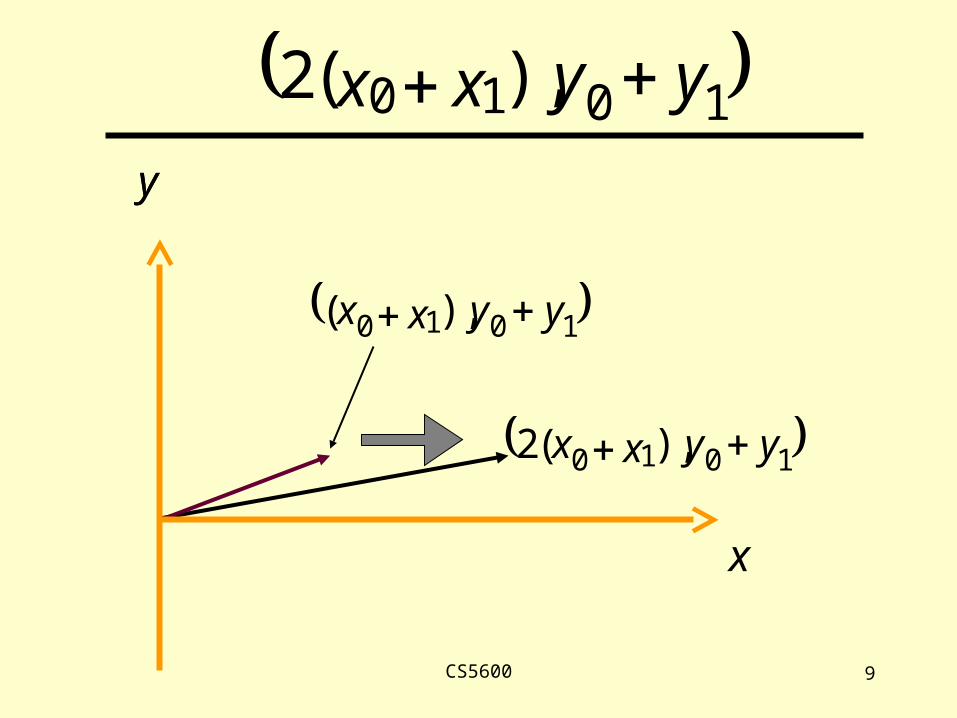
Summary on Scale
• “Scale then add,” is same as
• “Add then scale”

CS5600 11
Matrix Representation
y
x
y
x 2
10
02
Scale in x by 2:
CS5600 12
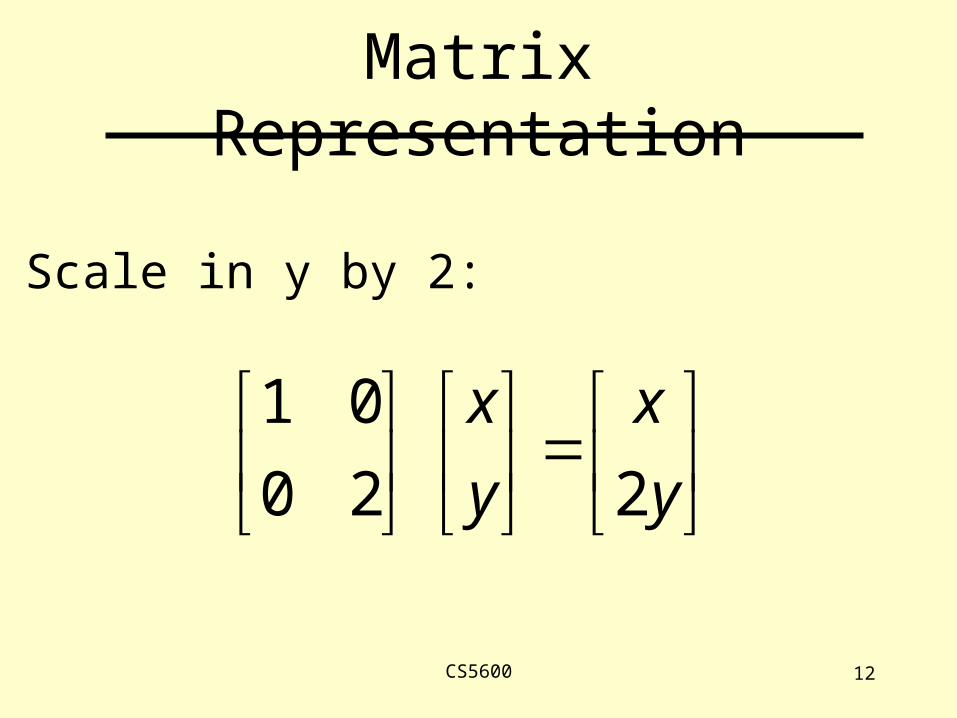
Matrix Representation
y
x
y
x
220
01
Scale in y by 2:

CS5600 13
Matrix Representation
y
x
y
x
y
x2
2
2
20
02
Overall Scale by 2:

CS5600 14
Matrix RepresentationShowing Same
)(
22
)(
)(2
10
02
10
10
10
10
10
10
yy
xx
yy
xx
yy
xx

CS5600 15
What about Rotation?
Is it linear?

CS5600 16
Rotate by
x
y
)0,1(
)1,0(
CS5600 17
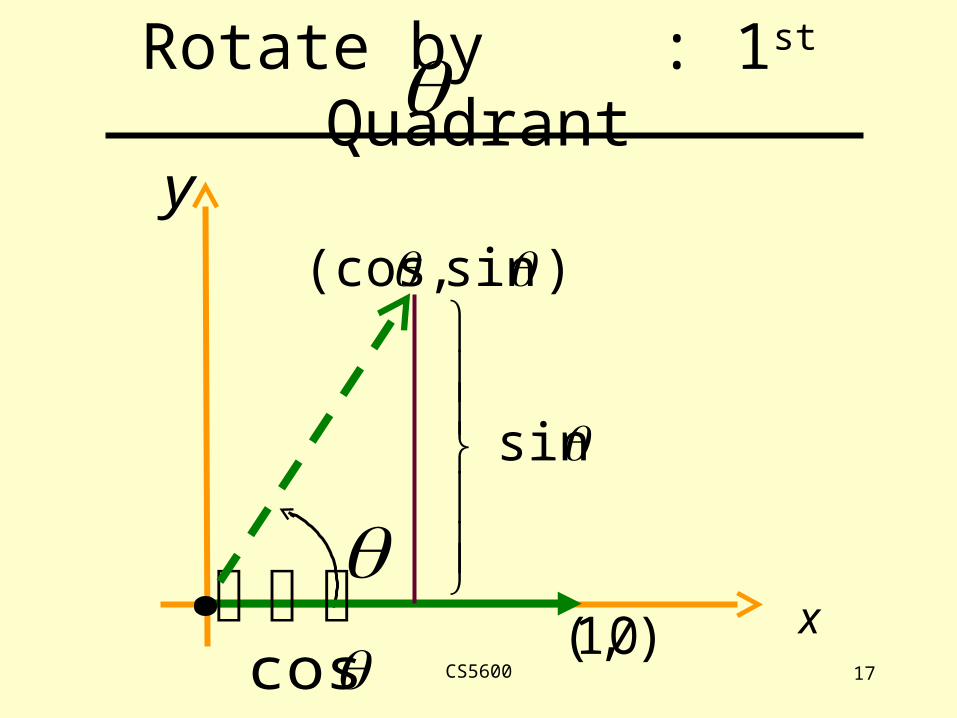
sin
Rotate by : 1st Quadrant
x
y
)0,1(
)sin,(cos
cos

CS5600 18
Rotate by : 1st Quadrant
)sin,(cos)0,1(

CS5600 19
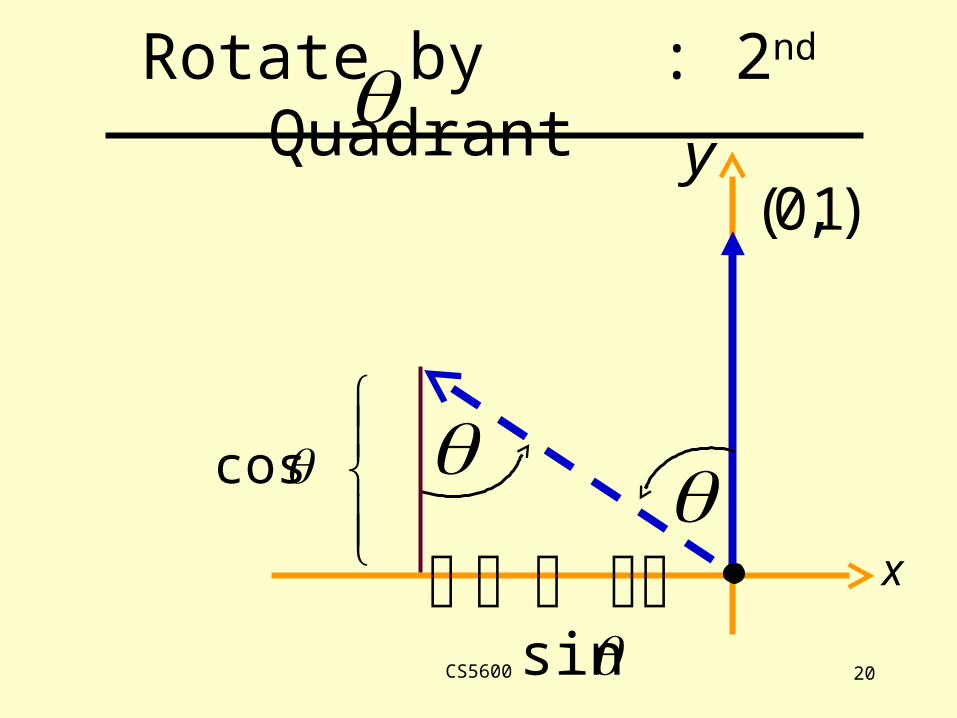
Rotate by : 2nd Quadrant
x
y
)1,0(
)0,1(
CS5600 20
Rotate by : 2nd Quadrant
x
y
cos
sin
)1,0(

CS5600 21
Rotate by : 2nd Quadrant
)cos,sin()1,0(
CS5600 22
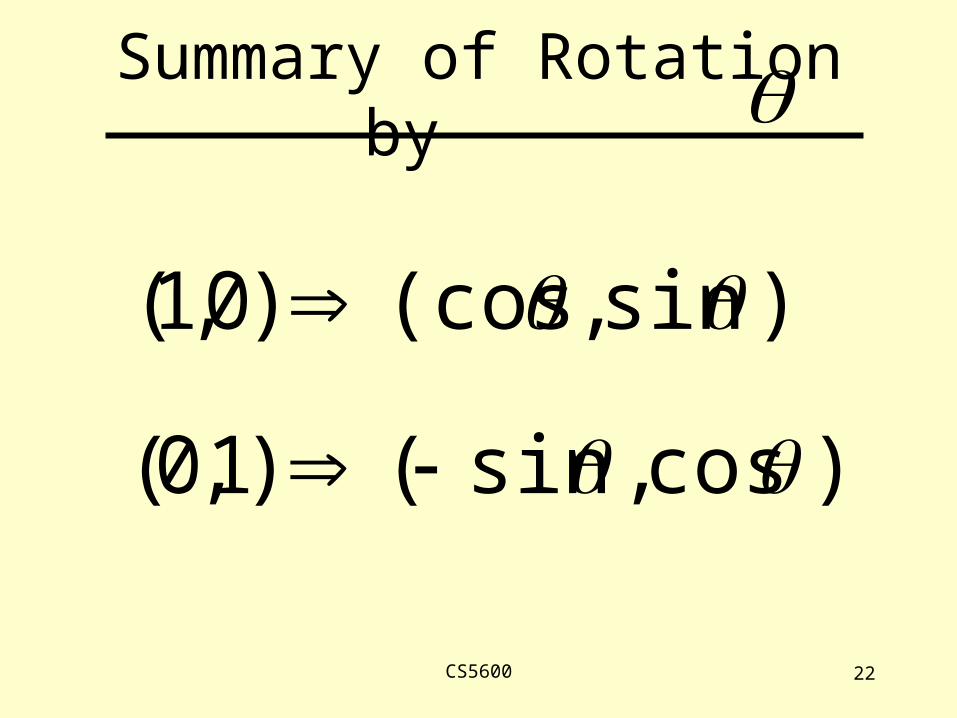
Summary of Rotation by
)sin,(cos)0,1(
)cos,sin()1,0(

CS5600 23
Summary (Column Form)
cos
sin
1
0
sin
cos
0
1

CS5600 24
Using Matrix Notation
sin
cos
0
1
cossin
sin-cos
cos
sin-
1
0
cossin
sin-cos
(Note that unit vectors simply copy columns)

CS5600 25
General Rotation by Matrix
cossin
ysin-cos
cossin
sin-cos
yx
x
y
x

CS5600 26
Who had linear algebra?
Who understand matrices?
CS5600 27
What do the off diagonal elements do?

CS5600 28
Off Diagonal Elements
ybx
x
y
x
b 1
01
y
ayx
y
xa
10
1

CS5600 29
Example 1
y
yx
x
y
xyxT
4.0
14.0
01),(
)1,0(
)0,1(
)1,1(
)0,0(
S
x

CS5600 30
Example 1
x
y
yx
x
yxT
4.0
),(
S
)1,0(
)0,1(
)1,1(
)0,0(

CS5600 31
Example 1
y
)1,0(
)4.0,1(
)0,0(
T(S)
yx
x
yxT
4.0
),()4.1,1(
x

CS5600 32
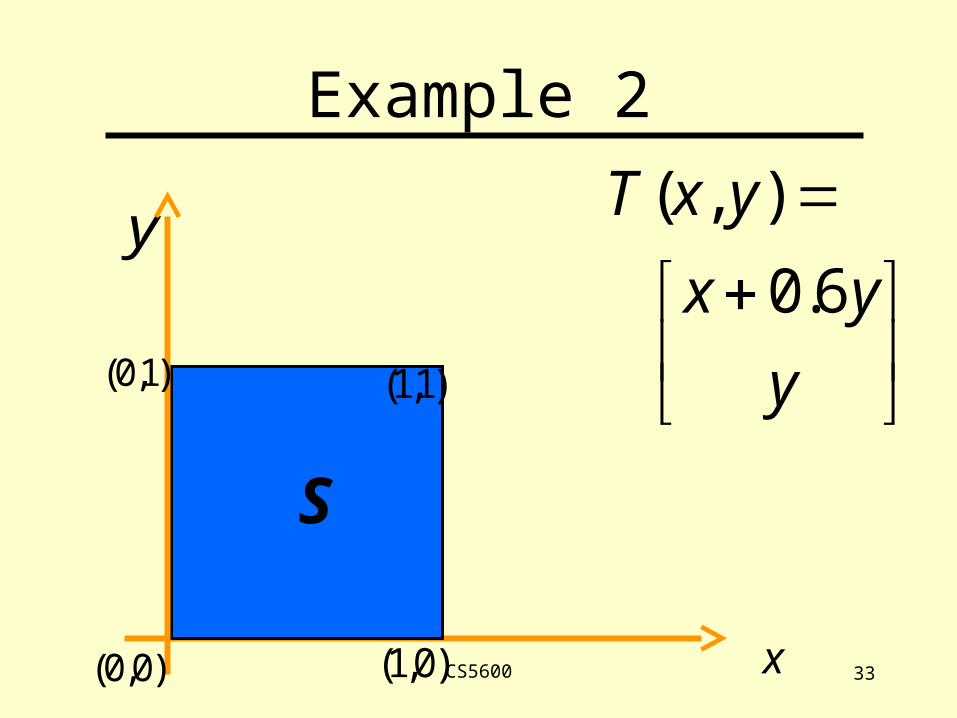
Example 2
y
y
yx
y
xyxT
6.0
10
6.01),(
S
x
)1,0(
)0,1(
)1,1(
)0,0(
CS5600 33
Example 2
x
y
y
yx
yxT
6.0
),(
S
)1,0(
)0,1(
)1,1(
)0,0(

CS5600 34
Example 2
x
y
)1,0(
)0,1()0,0(
T(S)
)1,6.0(
y
yxyxT
6.0 ),(
)1,6.1(
CS5600 35
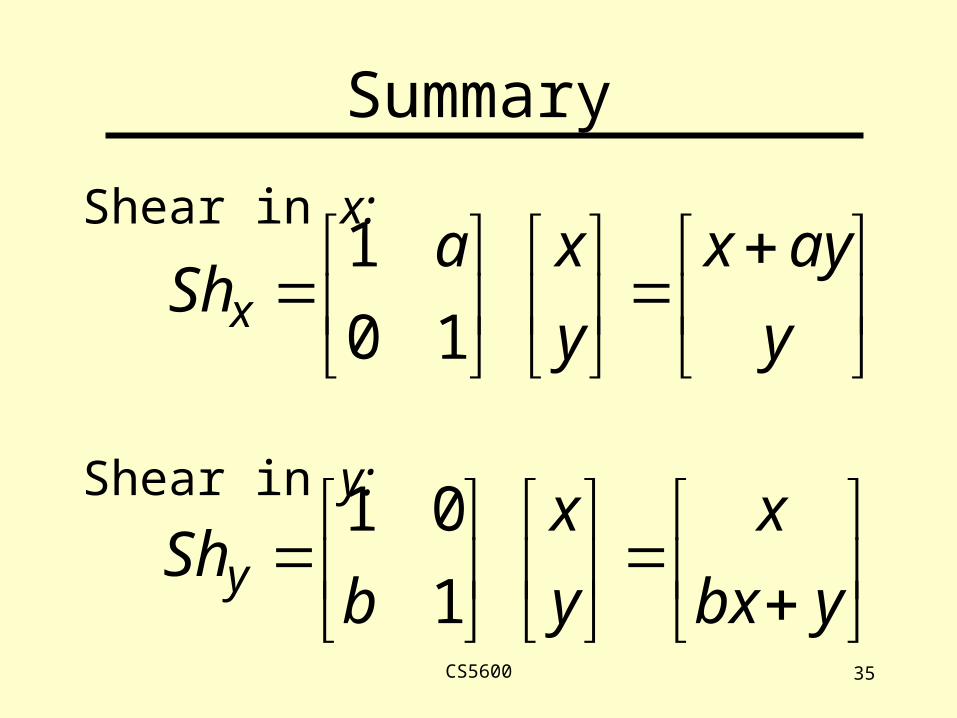
Summary
Shear in x:
Shear in y:
y
ayx
y
xaShx 10
1
ybx
x
y
x
bShy 1
01

CS5600 36
Double Shear
ab)(10
1
1
01
1
1
b
aa
b
1
1 ab)(
1
01
10
1
b
a
b
a

CS5600 37
Sample Points: unit inverses
0
11
1
01
bb
1
0
10
1
1
aa

CS5600 38
Geometric View of Shear in x
)0,1(
)1,( a )1,0(
)0,1(
)1,1(

Another Geometric View of Shear in x
x39x x
yy

Another Geometric View of Shear in x
40
x
y

CS5600 41
Geometric View of Shear in y
)1,0(
)0,0(
),1( b
)1,0(
)0,1()0,0(
)1,1(

Another Geometric View of Shear in y
h h42
x
y
x
y

Another Geometric View of Shear in y
43
x
y
CS5600 44
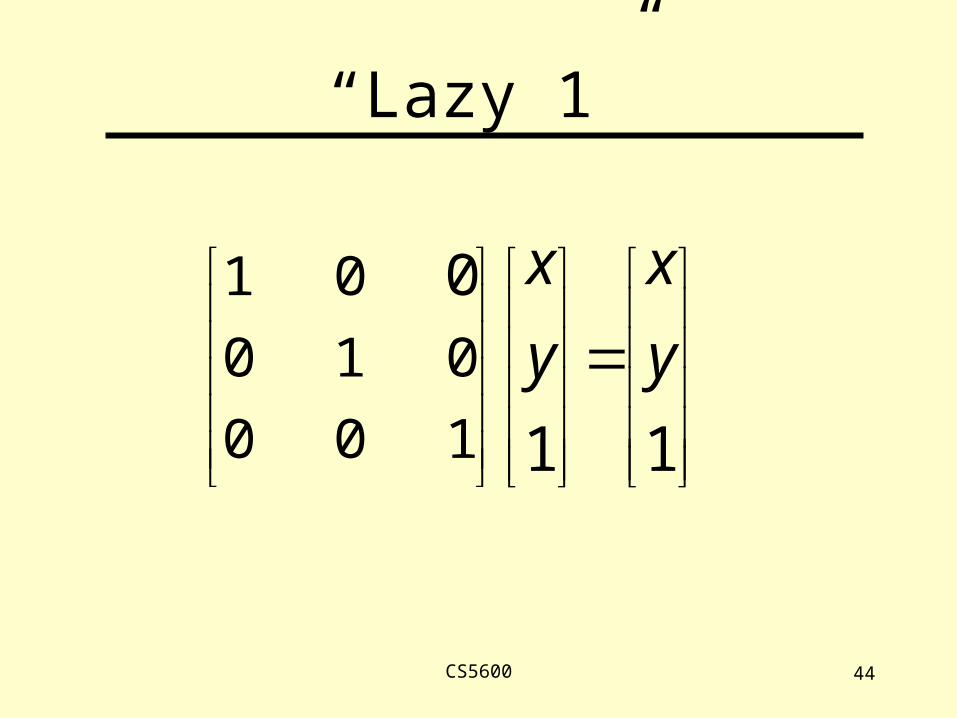
“Lazy 1”
100
010
01 0
11
y
x
y
x

CS5600 45
Translation in x
1
y
x
10 10
010
01
yxdx
xd
CS5600 46
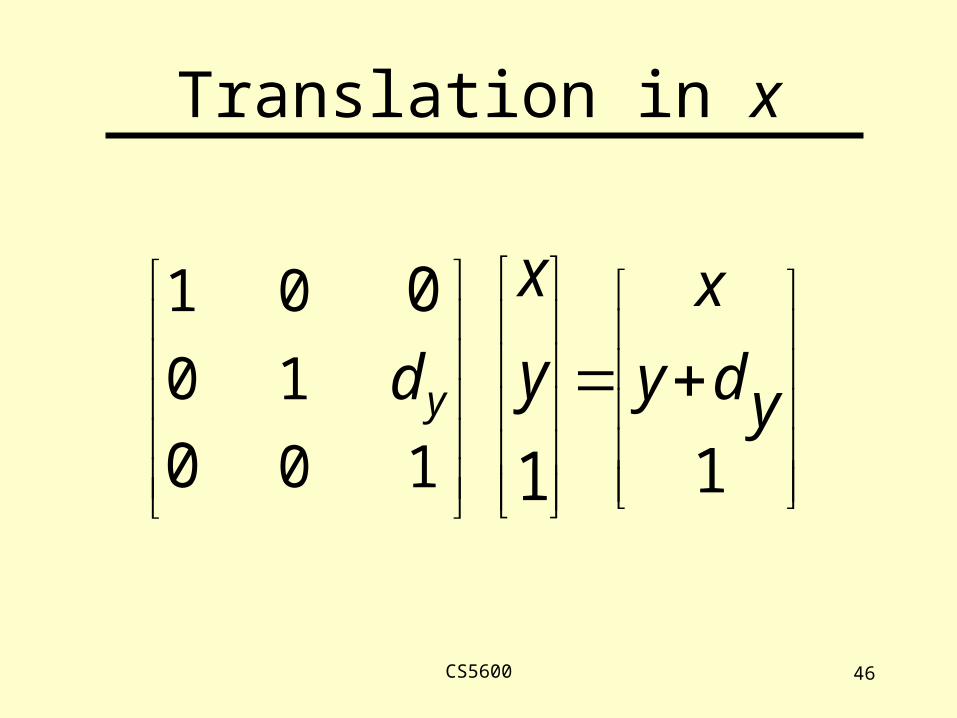
Translation in x
1
y
x
10
0
10
10
01
ydy
x
d y

CS5600 47
Homogeneous Coordinates
100
010
01 0
11
y
x
y
x
CS5600 48
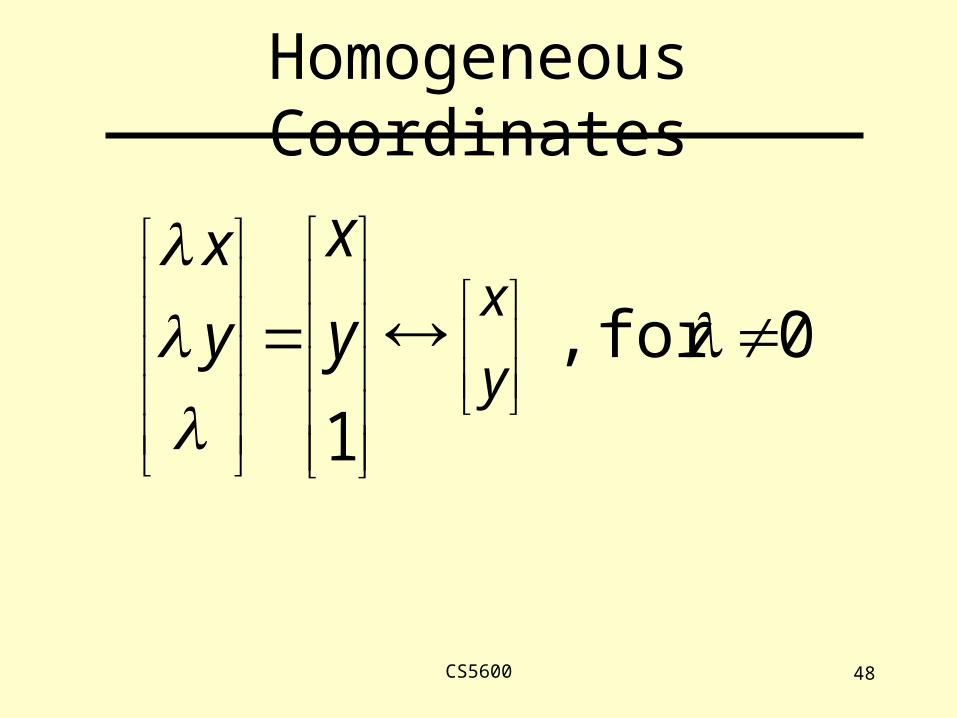
Homogeneous Coordinates
0for ,
y
xy
x
1
y
x

CS5600 49
Homogeneous Coordinates
Homogeneous term effects overall scaling
0,For
y
xy
x
y
x
y
x
1100
010
01
11
0

Homogeneous CoordinatesAn infinite number of points correspond to (x,y,1).
They constitute the whole line (tx,ty,t).
x
w
y
w = 1
(tx,ty,t)
(x,y,1)

CS5600 51
We’ve got Affine Transformations
Linear + Translation

CS5600 52
Compound Transformations
• Build up compound transformations by concatenating elementary ones
• Use for complicated motion
• Use for complicated modeling
CS5600 53
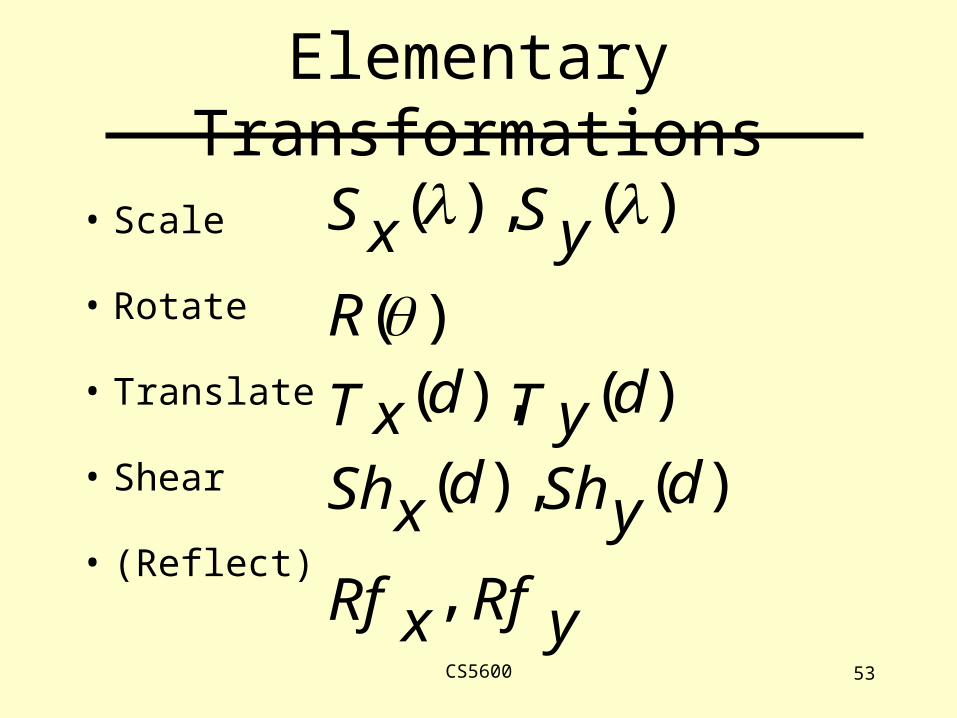
Elementary Transformations
• Scale
• Rotate
• Translate
• Shear
• (Reflect)
)(R)(),( dT ydT x
Rf yRf x,
)(),( dSh ydShx
)(),( S yS x

CS5600 54
Refection about y-axis
0
1
0
1
10
01

CS5600 55
Reflection about y-axis
x
y
),( yx),( yx
)0,1()0,1(
CS5600 56
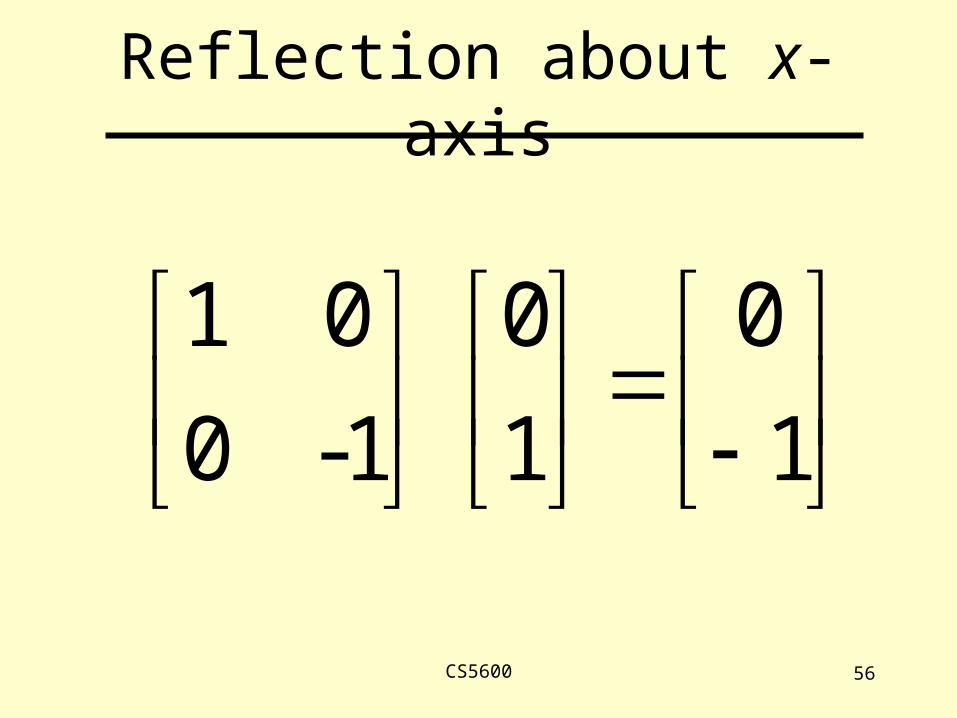
Reflection about x-axis
1
0
1
0
1-0
01

CS5600 57
Reflection about x-axis
x
y
)1,0( ),( yx
),( yx )1,0(
Is Reflection “Elementary?”
• Can we effect reflection in an elementary way?
• (More elementary means scale, shear, rotation, translation.)
58

CS5600 59
Reflection is Scale (-1)
CS5600 60
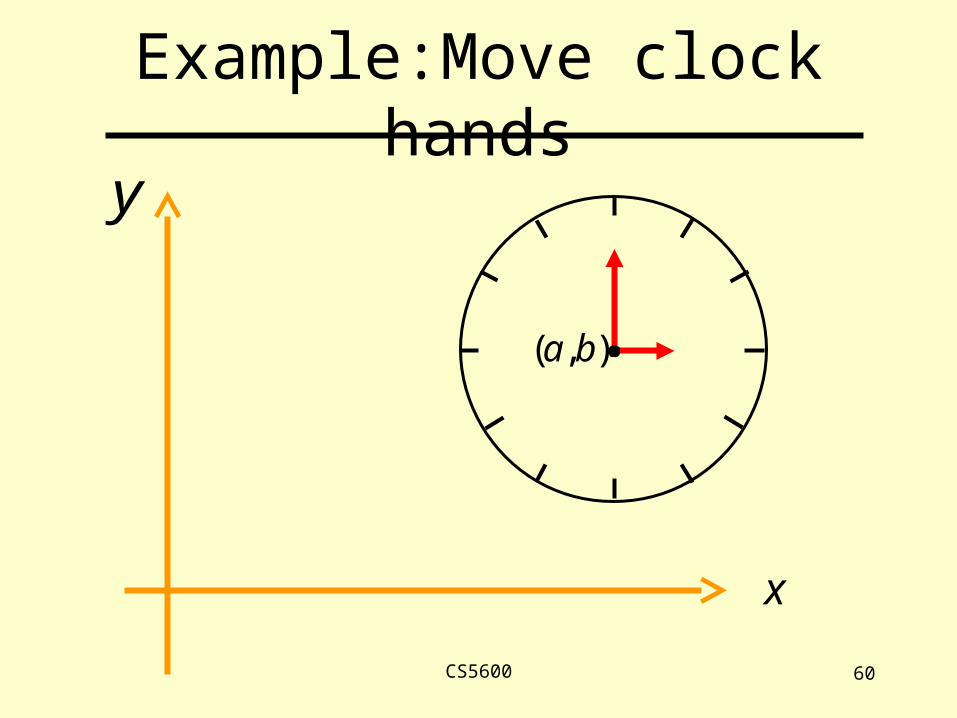
Example:Move clock hands
x
),( ba
y

CS5600 61
Example:Move clock hands
),( ba
x
y

CS5600 62
Example:Move clock hands
),( ba
x
y

CS5600 63
Example:Move clock hands
y
),( ba
x

CS5600 64
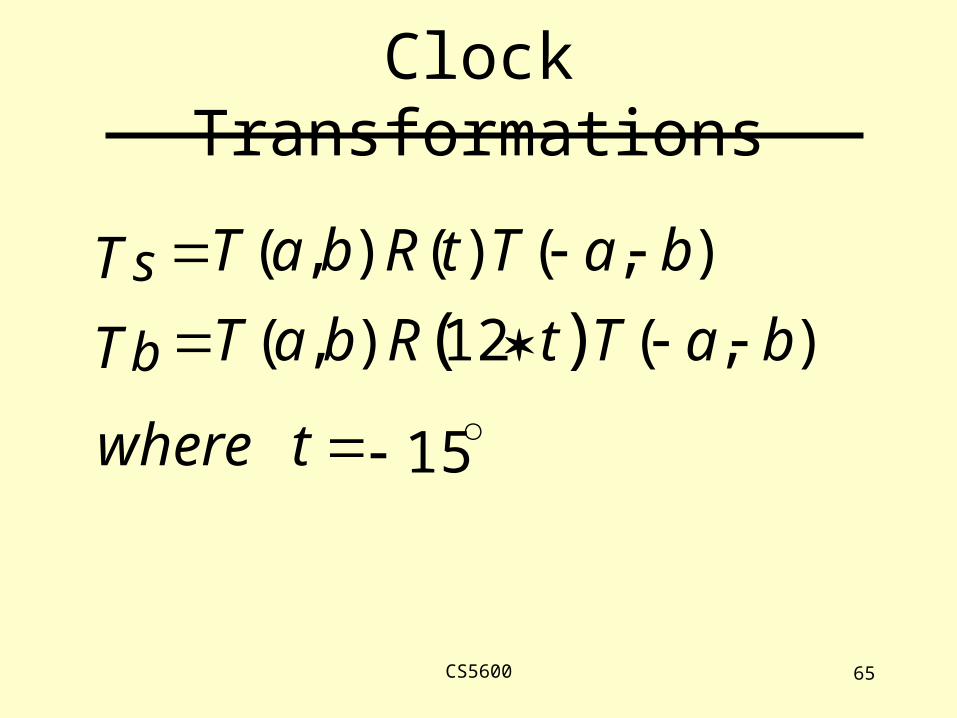
Clock Transformations
• Translate to Origin
• Move hand with rotation
• Move hand back to clock
• Do other hand
CS5600 65
Clock Transformations
15
),(12),(
),()(),(
)(
twhere
baTtRbaTT
baTtRbaTT
b
s

CS5600 66
Clock Transformations
1
y
x
1
10
01
11
10
01
0000
0)cos()sin(
0)sin()cos(
00
b
a
tt
tt
b
a

CS5600 67
Map [a,b] [0,1]
0[ ]
x
a b
x
1

CS5600 68
Map [a,b] [0,1]
• Translate to Origin
• Map x to translated interval
axx
ababaaba ,0,,
CS5600 69
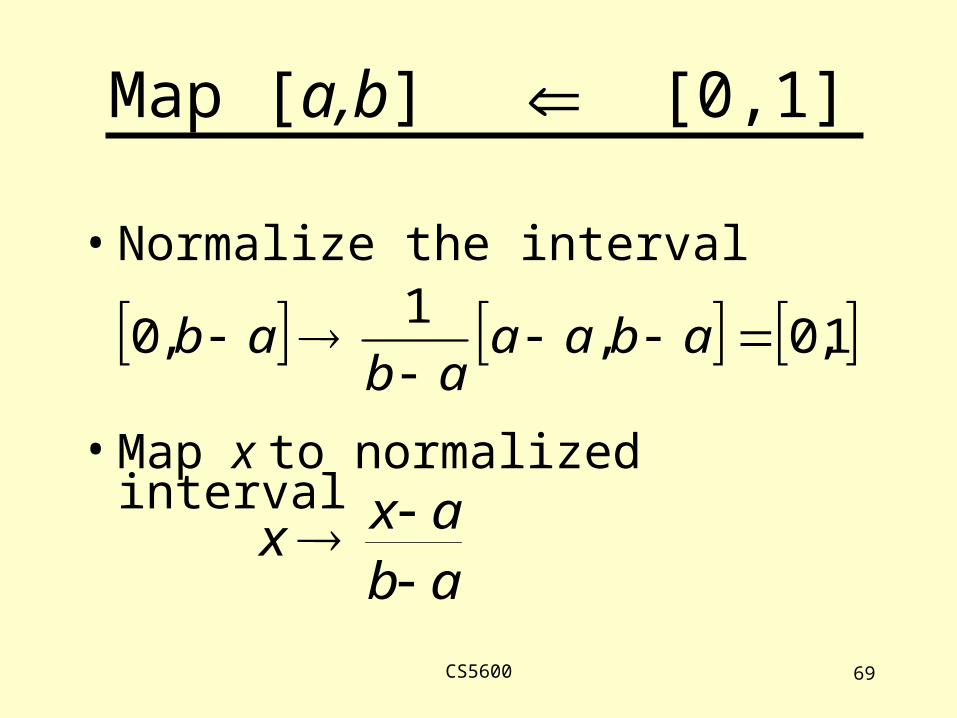
Map [a,b] [0,1]
• Normalize the interval
• Map x to normalized interval
abaxx
1,0,1
,0
abaaab
ab

CS5600 70
Map [a,b] [0,1])( aT x
abS x1
1100
010
01
y
xa
1
yab
ax
100
010
001
ab

CS5600 71
Just Look at
10
01
ab
1 RThis is a homogeneous form for 1D
)( aT x
abS x1
10
1 a
1
x
1
ab
ax

CS5600 72
Map [a,b] [-1,1]
0[ ]
-1 +1x
a bx
2
ba

CS5600 73
Map [a,b] [-1,1]
• Translate center of interval to origin
• Normalize interval to [-1,1]
2
baxx
22 2
1 bax
bax
ab

CS5600 74
Map [a,b] [-1,1]
• Substitute x =a (analogous for x =b) :
12
)(2
2
22
22
22
ab
ab
baa
ab
baa
ab
x
CS5600 75
Now Map [a,b] [c,d]
• First map [a,b] to [0,1]
– (We already did this)
• Then map [0,1] to [c,d]
CS5600 76
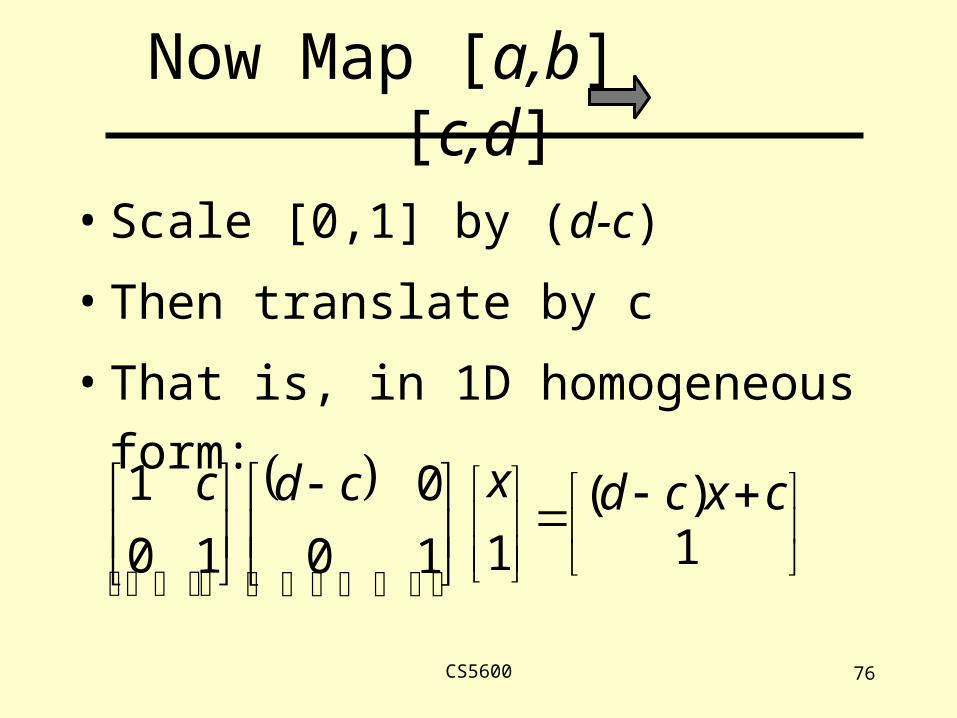
Now Map [a,b] [c,d]
• Scale [0,1] by (d-c)
• Then translate by c
• That is, in 1D homogeneous form:
1)(
110
0
10
1 cxcdxcdc
CS5600 77
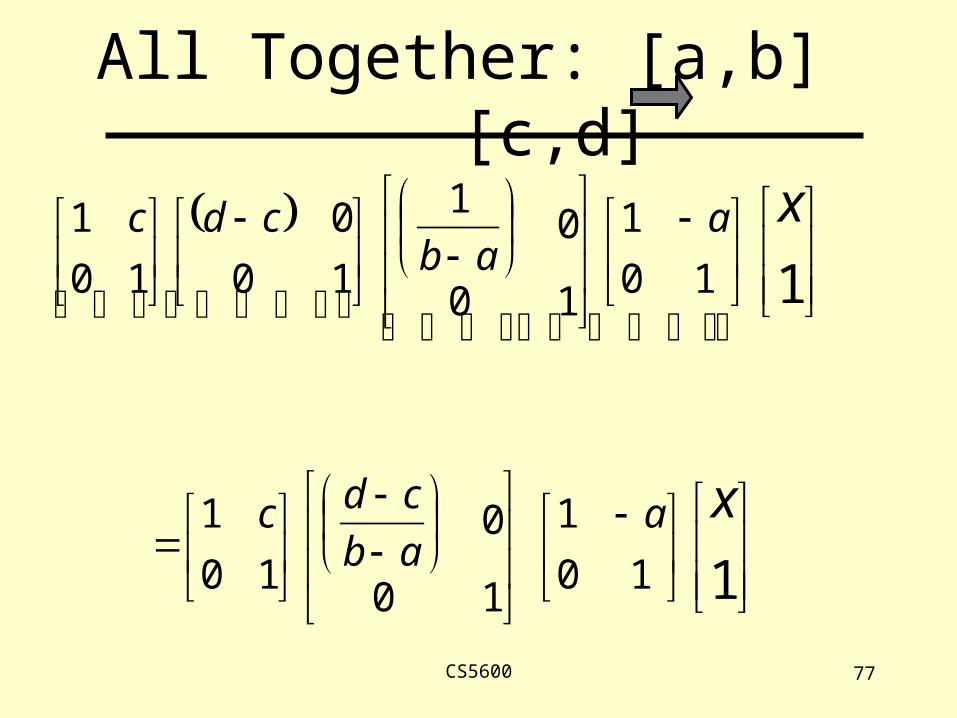
All Together: [a,b] [c,d]
110
1
10
01
10
0
10
1 xaab
cdc
110
1
10
010
1 xaab
cdc
CS5600 78
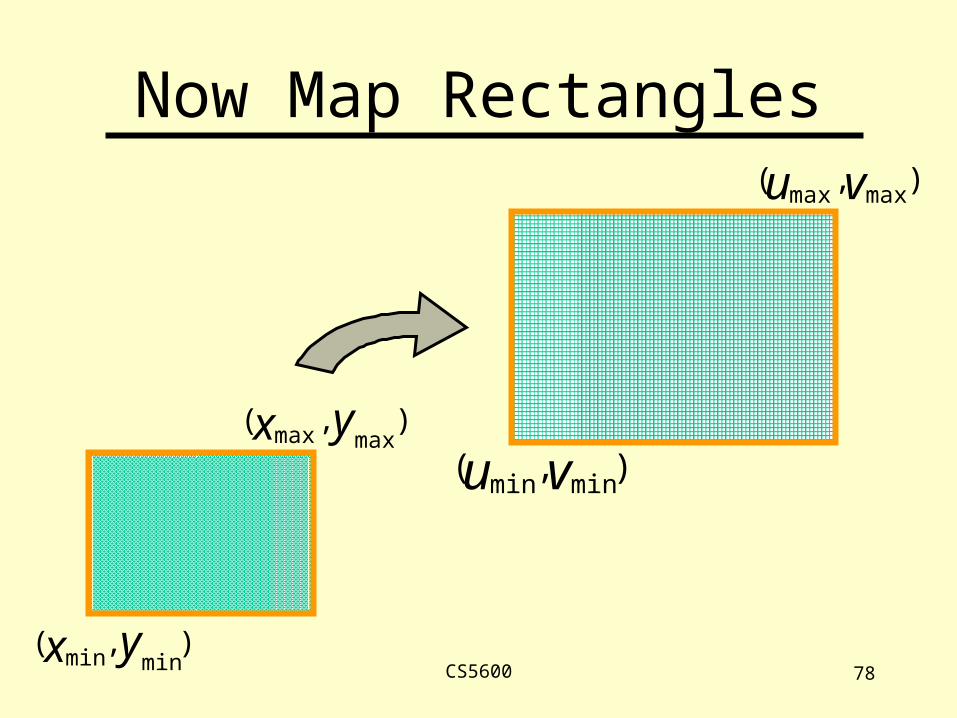
Now Map Rectangles
),(minmin yx
),(maxmax vu
),(minmin vu
),(maxmax yx

CS5600 79
Transformation in x and y
yyvv
xxuu
yx
vu
xx
y
x
y
x
minmax
minmax
minmax
minmax
min
min
min
min
,where
1100
10
01
100
00
00
100
10
01
,

This is the Viewport Transformation
• Good for mapping objects from one
coordinate system to another
• This is what we do with windows and
viewports
80
CS5600 81
3D Transformations
• Scale
• Rotate
• Translate
• Shear
)(),(),( dT zdT ydT x
)(),(),( dShzdSh ydShx
)(),(),( S zS yS x
)(),(),( RzR yRx
CS5600 82
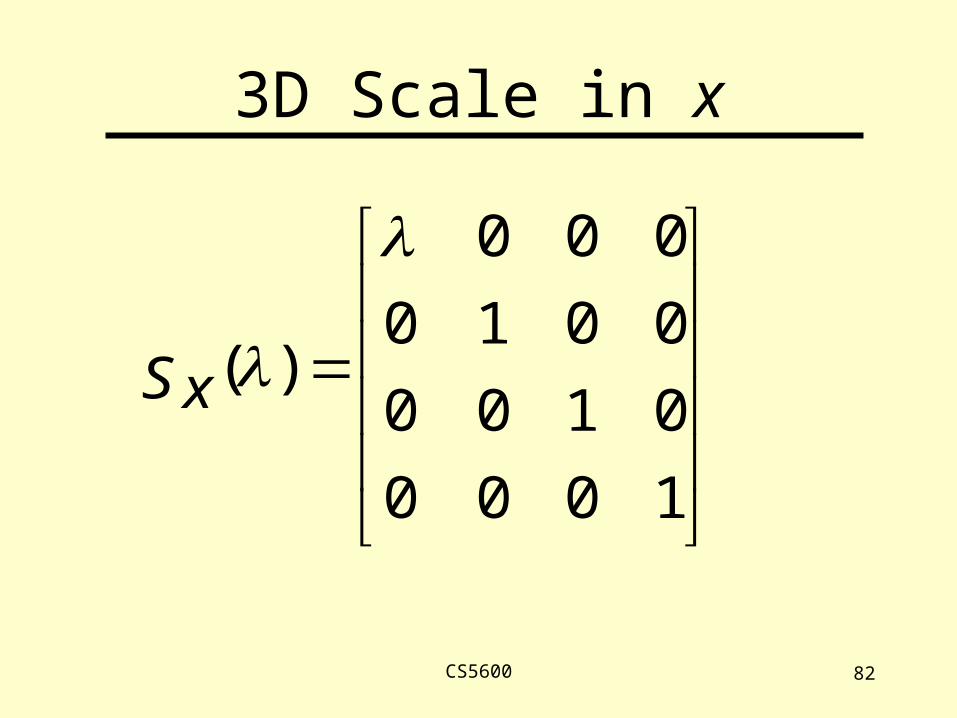
3D Scale in x
1000
0100
0010
000
)(
S x
CS5600 83
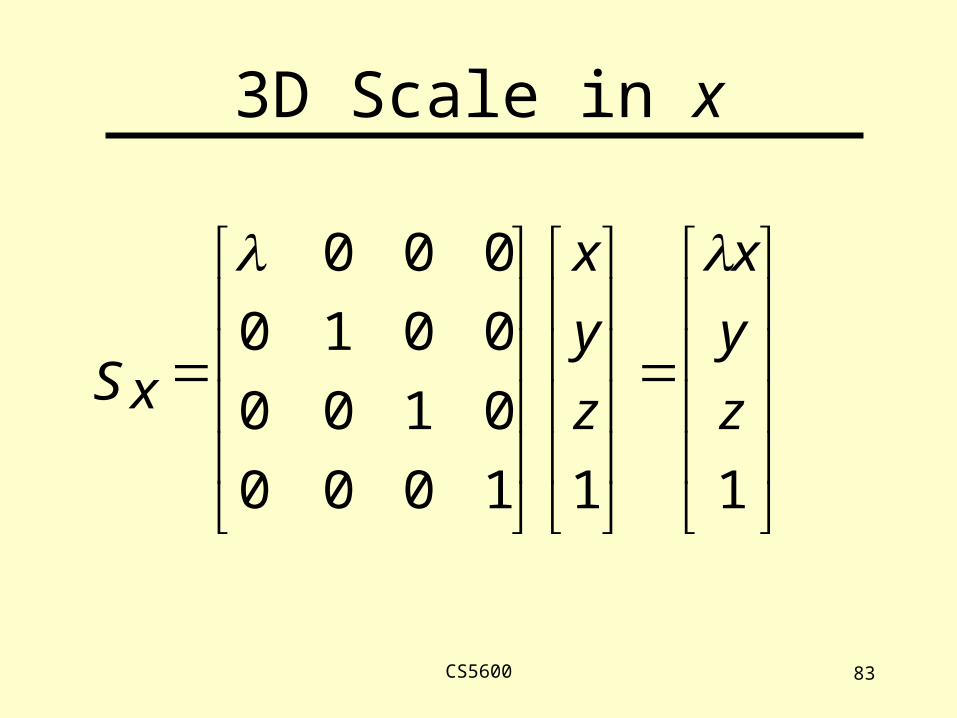
3D Scale in x
111000
0100
0010
000
z
y
x
z
y
x
S x

CS5600 84
3D Scale in y
111000
0100
000
0001
)(z
y
x
z
y
x
S y

CS5600 85
3D Scale in z
111000
000
0010
0001
)(z
y
x
z
y
x
S z

CS5600 86
Overall 3D Scale
11 1000
0100
0010
0001
)(z
y
x
z
y
x
S

CS5600 87
Overall 3D Scale
Same in x,y and z:
z
y
x
z
y
x
z
y
x
11

What is a Positive Rotation in 3D ?
• Sit at end of given axis
• Look at Origin
• CC Rotation is in Positive direction
88

3D Positive Rotations
x
z
y
CS5600 90
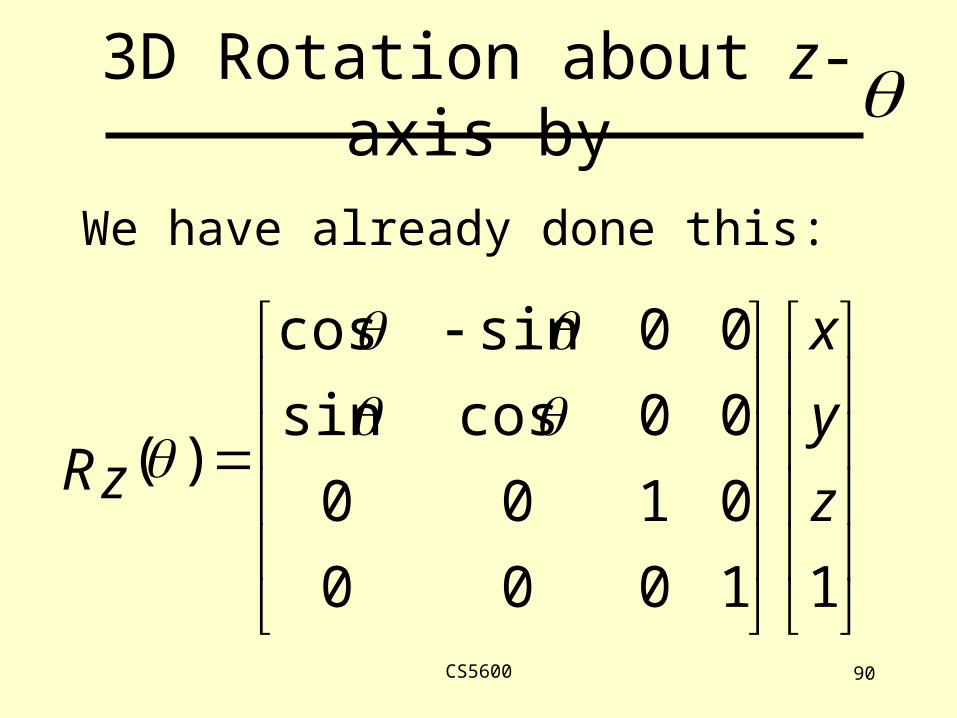
3D Rotation about z-axis by
We have already done this:
11000
0100
00cossin
00sincos
)(z
y
x
Rz

CS5600 91
3D Rotation about x-axis by
y
z
)0,1,0(
)1,0,0(

CS5600 92
3D Rotation about x-axis
11000
0cossin0
0sincos0
0001
)(z
y
x
Rx

3D Rotation about y-axis by
x
z
)0,0,1(
)1,0,0(
93

CS5600 94
3D Rotation about y-axis
11000
0cos0sin
0010
0sin0cos
)(z
y
x
R y

CS5600 95
Elementary Transformations
• Scale
• Rotate
• Translate
• Shear
• (Reflect)
)(),( R yRx)(),( dT ydT x
)(),( S yS x
Rf yRf x,
)(),( dSh ydShx

CS5600 96
Consider an arbitrary 3D rotation
• What is its inverse?
• What is its transpose?
• Can we constructively elucidate this
relationship?

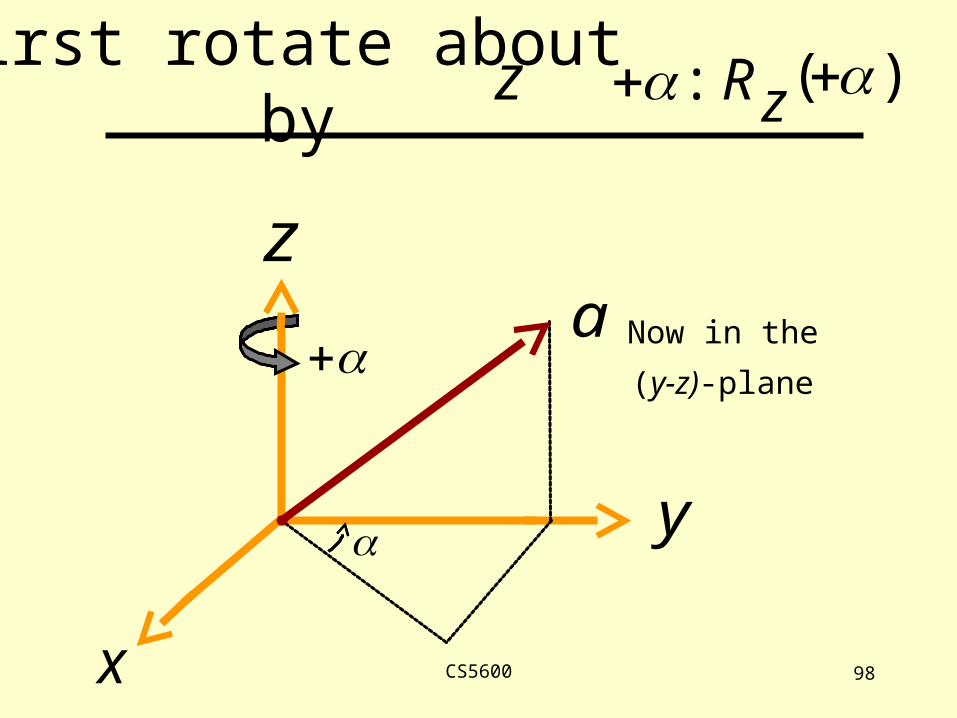
Want to rotate by about arbitrary axis a
a
)(: Ra
x
z
y
97
CS5600 98
First rotate about by
)(: Rzz
a Now in the
(y-z)-plane
x
z
y

CS5600 99
Then rotate about by
x
z
y
)(: Rx x
Rotate in the
(y-z)-plane
a

Now perform rotation about -
x
z
y
)(: Raxisz za Now aligned
with z-axis
100
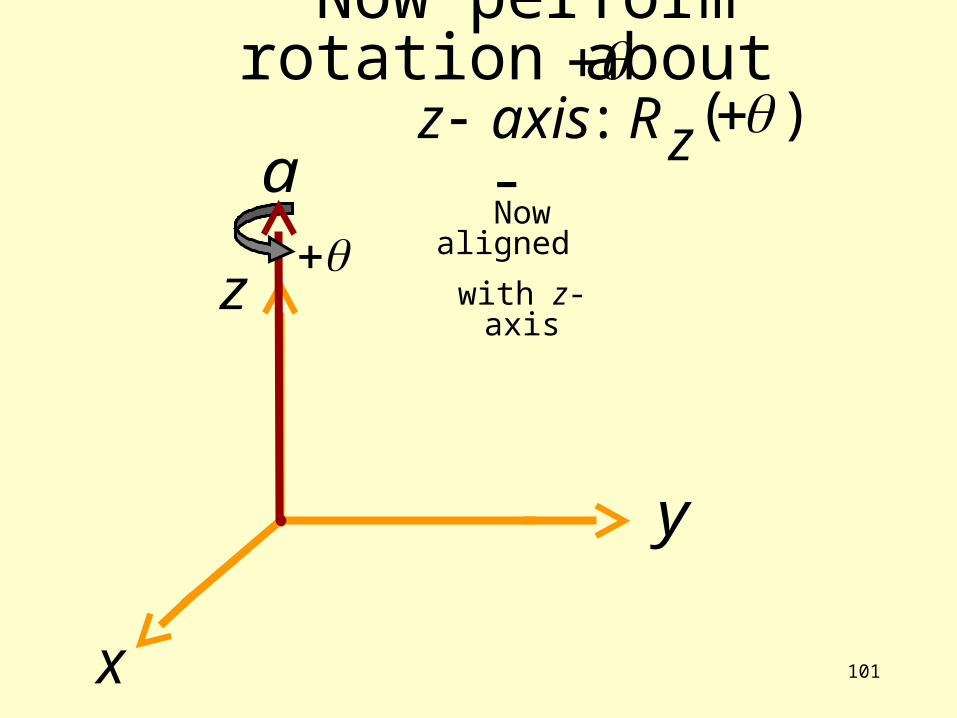
Now perform rotation about -
x
z
y
)(: Raxisz zaNow aligned
with z-axis
101
CS5600 102
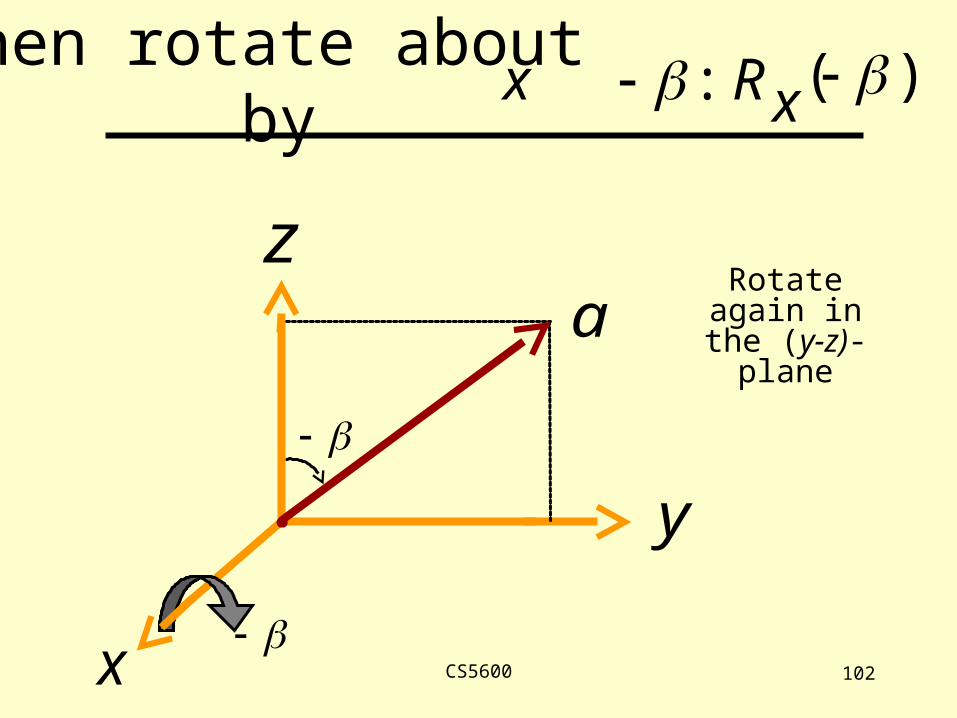
Then rotate about by )(: Rx x
Rotate again in the (y-z)-plane
x
z
y
a
CS5600 103
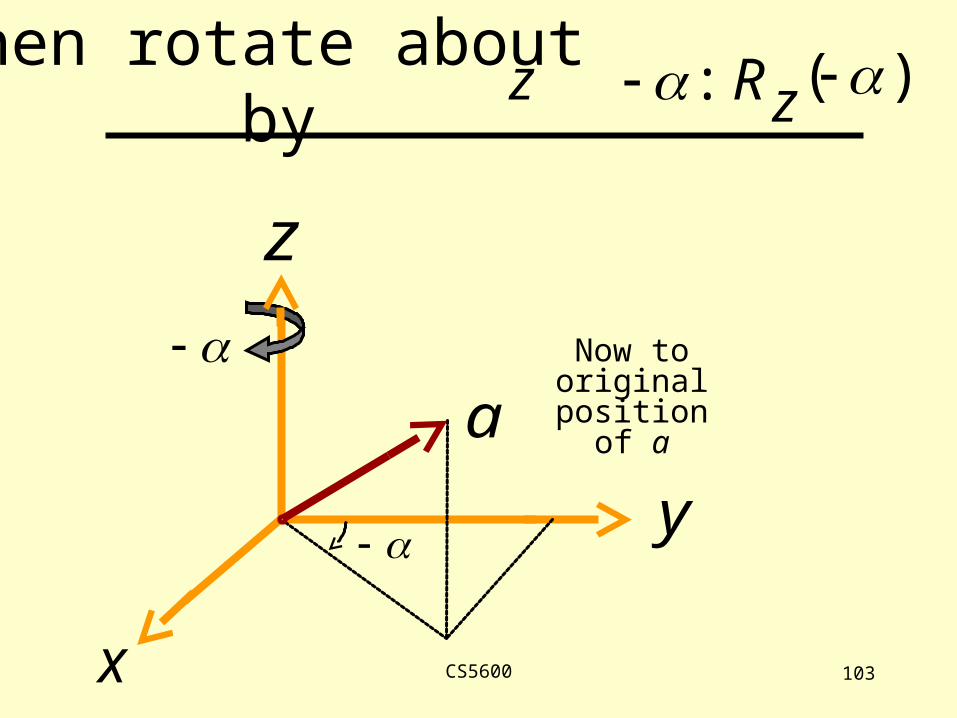
Then rotate about by )(: Rz z
Now to original position of a
a
x
z
y

We effected a rotation by about arbitrary axis a
a
)(: Ra
x
z
y
104
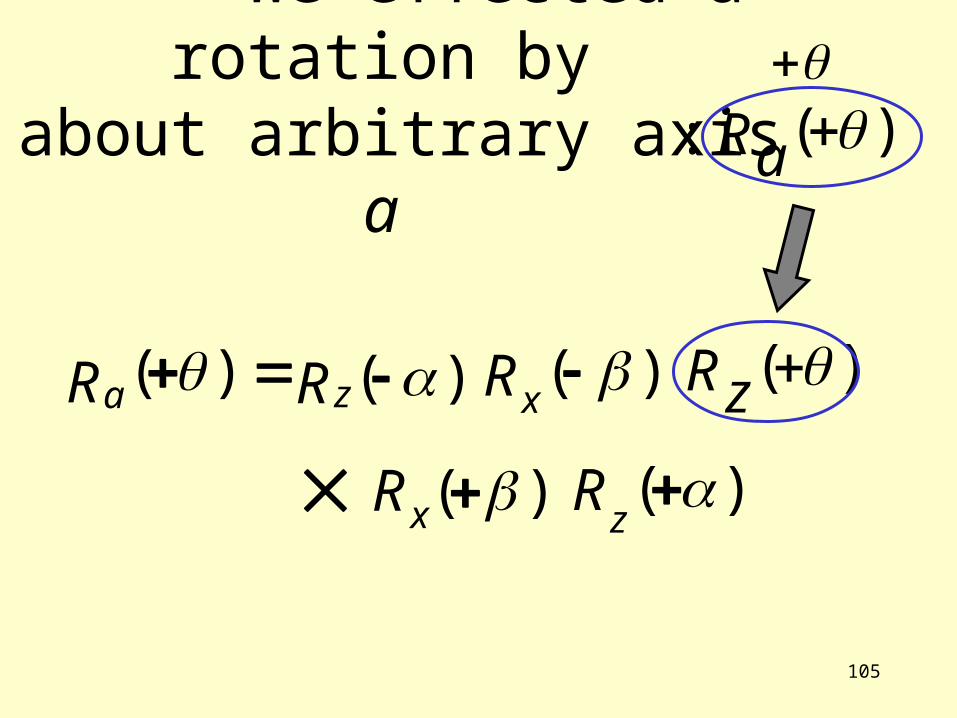
We effected a rotation by about arbitrary axis a )(: Ra
105
)()()( RRR z xa)( Rz
)()( RRx z
CS5600 106
Rotation about an arbitrary axis
• Rotation about a-axis can be effected by a composition of 5 elementary rotations
• We show arbitrary rotation as succession of 5 rotations about principal axes

CS5600 107
)( Ra
1000
0)cos()sin(0
0)sin()cos(00001
10000100
00)cos()sin(
00)sin()cos(
)(
Ra
1000010000cossin00sincos
1000
0cossin0
0sincos00001
1000010000cossin00sincos
)( Rz
In matrix terms, )( Rz
)( Rx
)( Rx
)( Rz
CS5600 108
1000
0)cos()sin(0
0)sin()cos(00001
10000100
00)cos()sin(
00)sin()cos(
)(
Ra
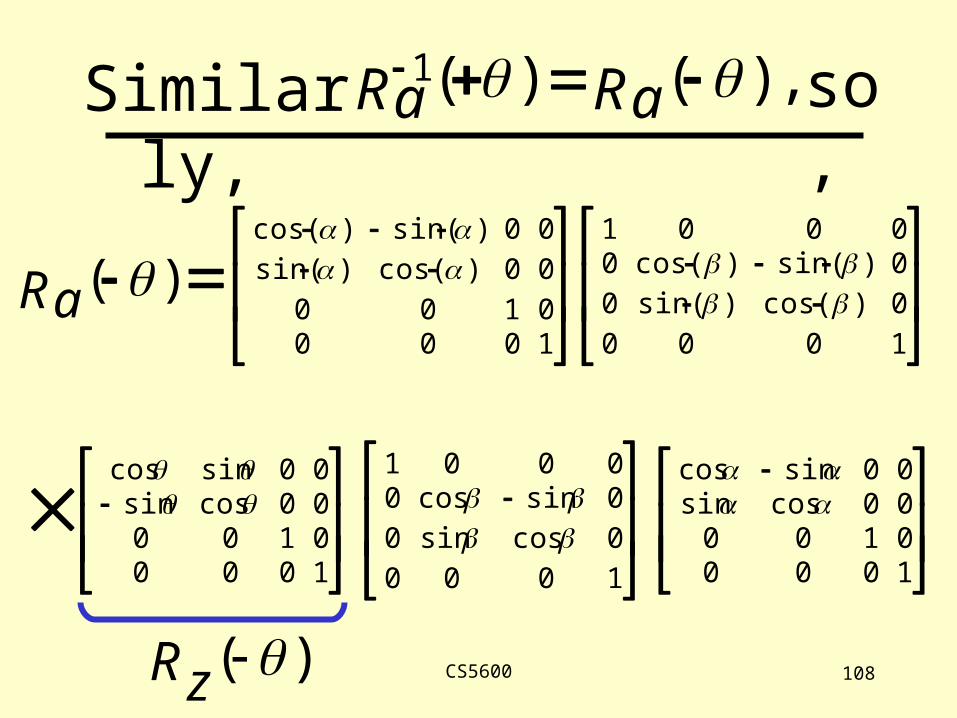
,)()(1 RaRa
1000010000cossin00sincos
1000
0cossin0
0sincos00001
1000010000cossin00sincos
)( Rz
Similarly, so,

CS5600 109
Recall, tAtBtAB
RtMtRtA
tttt RRMt
RMR .
Consequently, for , RMtRA
because,
RMR tt

CS5600 110
RStMtStRt
RSMtStR
It follows directly that,

CS5600 111
)()(1 RtaRa
)( Rtz
1000
0)cos()sin(0
0)sin()cos(00001
10000100
00)cos()sin(
00)sin()cos(
)(
Ra
1000010000cossin00sincos
1000
0cossin0
0sincos00001
1000010000cossin00sincos

CS5600 112
)()( 1 RtaRa
Constructively, we have shown,
This will be useful later

CS5600 113
3D Translation in x
111000
0100
0010
001
)(z
yd xx
z
y
xd x
d xT x

CS5600 114
3D Translation in y
111000
0100
010
0001
)(zd yy
x
z
y
x
d yd yT y

CS5600 115
3D Translation in z
111000
100
0010
0001
)(d zz
y
x
z
y
x
d zd zT z
CS5600 116
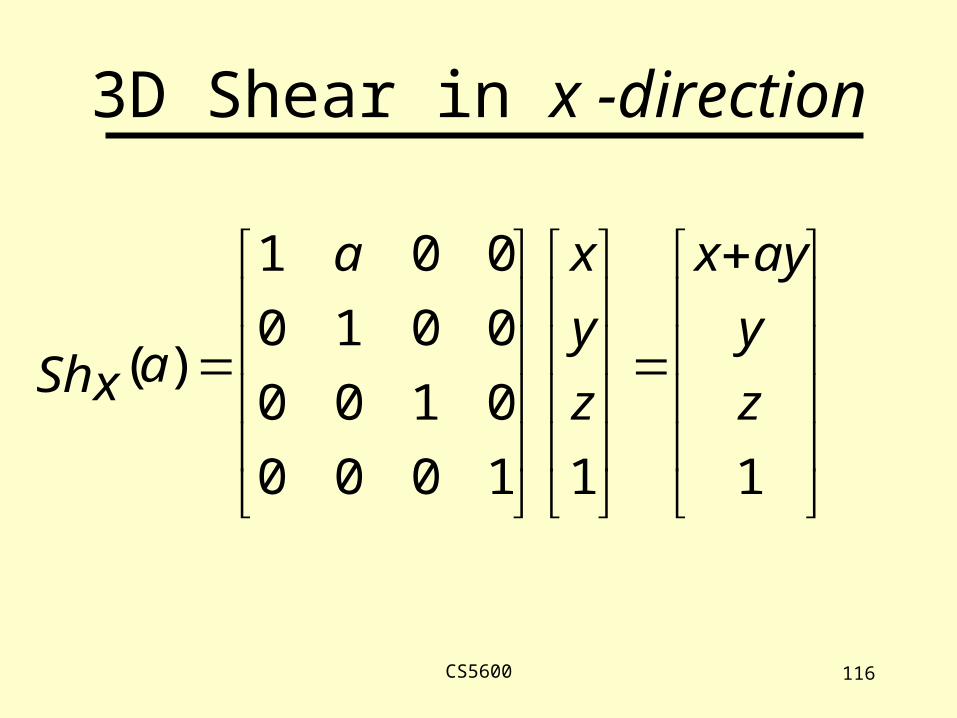
3D Shear in x -direction
111000
0100
0010
001
)(z
y
ayx
z
y
xa
aShx
CS5600 117
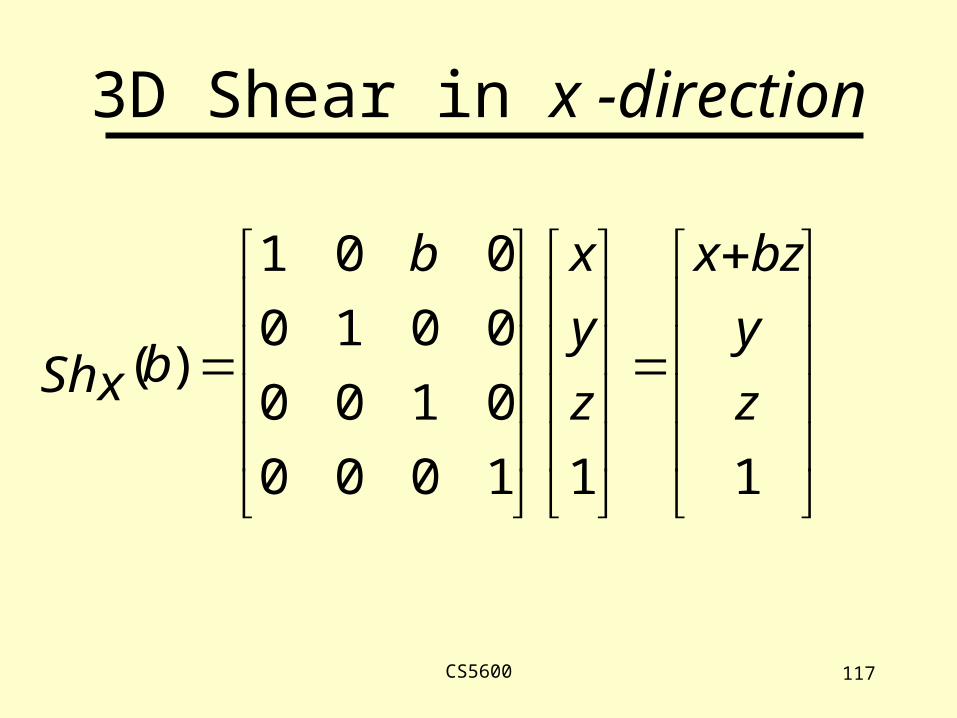
3D Shear in x -direction
111000
0100
0010
001
)(z
y
bzx
z
y
xb
bShx

CS5600 118
3D Shears:clamp a principal plane, shear in other 2 DoFs
x
z
y

x
z
y
111000
0100
0010
001
)(z
y
ayx
z
y
xa
aShx
x
z
y

CS5600 120
3D Shear in y -direction
111000
0100
010
0001
)(z
czy
x
z
y
x
ccShy

CS5600 121
3D Shear in y -direction
111000
0100
001
0001
)(z
ydx
x
z
y
x
ddShy

x
z
y
x
z
y
111000
0100
001
0001
)(z
ydx
x
z
y
x
ddShy

CS5600 123
3D Shear in z -direction
111000
010
0010
0001
)(zex
y
x
z
y
x
eeShz
CS5600 124
3D Shear in z
111000
010
0010
0001
)(zex
y
x
z
y
x
eeShz

CS5600 125
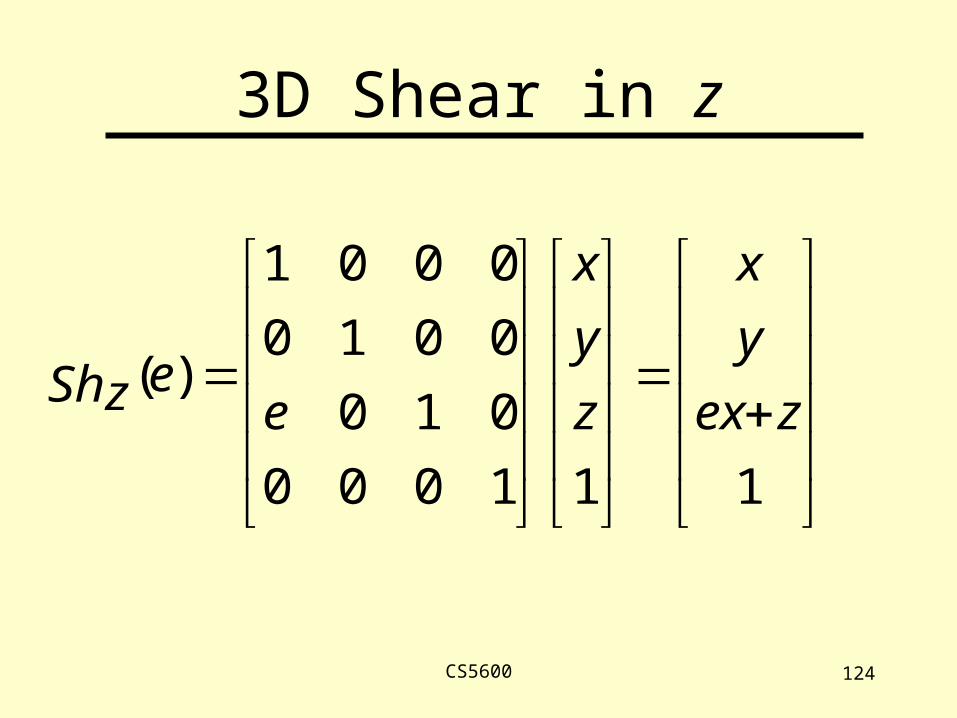
3D Shear in z
111000
010
0010
0001
)(zfy
y
x
z
y
x
ffShz
CS5600 126
What is “Perspective?”
• A mechanism for portraying 3D in 2D
• “True Perspective” corresponds to
projection onto a plane
• “True Perspective” corresponds to an
ideal camera image

Many Kinds of Perspective Used
• Mechanical Engineering
• Cartography
• Art

CS5600 128
Perspective in Art
• Naïve (wrong)
• Egyptian
• Cubist (unrealistic)
• Esher
– Impossible (exploits local property)
– Hyperpolic (non-planar)
– etc
CS5600 129
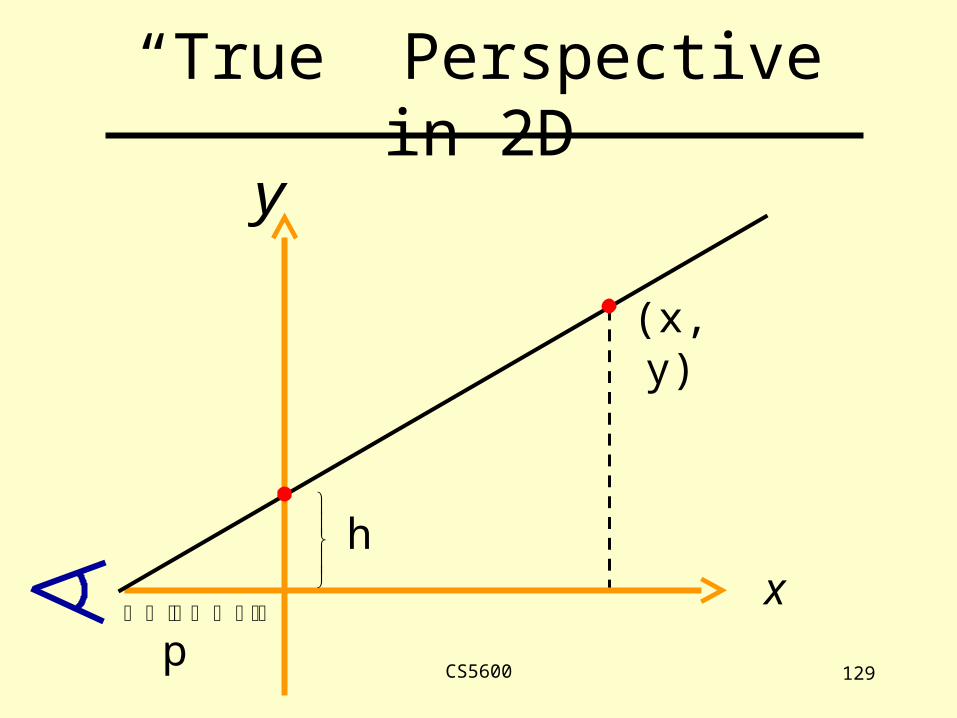
“True” Perspective in 2D
y
x
(x,y)
p
h

CS5600 130
“True” Perspective in 2D
pxpyh
pxy
ph

CS5600 131
“True” Perspective in 2D
px
py
px
px
px
py
px
px
p
pxpx
y
x
y
x
11
This is right answer for screen projection

CS5600 132
“True” Perspective in 2D
11101
010
001
yp
x
y
x
p
End Transformations I
Lect
ure
Set
5
133





























