Embed Size (px)
Citation preview
Transformations du milieu continu

Extensometriemesures du deplacement relatif de deux points
2/75

Extensometriemesures du deplacement relatif de deux points
3/75

Mesures de champ
mesures de champs de deformations
4/75

Mesures de champ de deplacementessai de traction simple
5/75

Mesures de champ de deplacementessai de traction simple
6/75

Mesures de champ de deplacementessai de traction simple
7/75

Mesures de champ de deplacementallongement de la zone utile
etat initial etat deforme
8/75

Mesures de champ de deplacementmethode de correlation d’images : reconnaissance des motifs autour d’un
reseau de points materiels et suivi de leurs deplacements
1
2
9/75

Mesures de champ de deplacementmethode de correlation d’images : reconnaissance des motifs autour d’un
reseau de points materiels et suivi de leurs deplacements
1
2
10/75
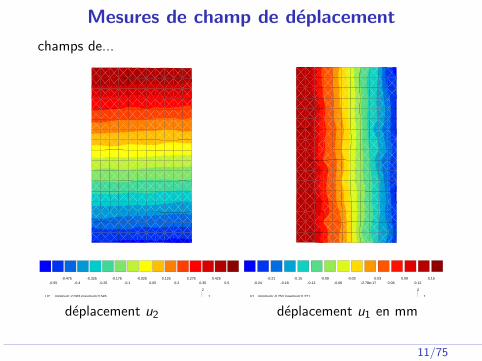
Mesures de champ de deplacement
champs de...
-0.55-0.475
-0.4-0.325
-0.25-0.175
-0.1-0.025
0.050.125
0.20.275
0.350.425
0.5
U2 minimum:-0.583 maximum:0.545 1
2
-0.24-0.21
-0.18-0.15
-0.12-0.09
-0.06-0.03
-2.78e-170.03
0.060.09
0.120.15
U1 minimum:-0.253 maximum:0.221 1
2
deplacement u2 deplacement u1 en mm
11/75

Mesures de champ de deplacementprofils de deplacement le long d’une ligne
x2 (mm)
u2(mm)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 2 4 6 8 10 12 14 16
x1 (mm)
u1(mm)
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 1 2 3 4 5 6 7 8 9 10
verticale horizontale
12/75

Mesures de champ de deplacementprofils de deplacement le long d’une ligne
x2 (mm)
u2(mm)
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 2 4 6 8 10 12 14 16
x1 (mm)
u1(mm)
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 1 2 3 4 5 6 7 8 9 10
verticale horizontale
F22 − 1 =∂u2
∂x2F11 − 1 =
∂u1
∂x1
13/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Transformation du milieu continu
( , )E R
Ω Ω0 t
X xΦ
la transformation Φ x = Φ(X , t)
le champ de deplacement u (X , t) = x − X = Φ(X , t)− X
Le gradient de la transformation 16/75

Le gradient de la transformation
Φ
X
xdX dx
application lineaire tangente associee a Φ
Φ(X + dX )− Φ(X ) =∂Φ
∂X.dX + o(X ,dX )
element de fibre materielle dX initiale et dx actuelle
F∼(X , t) =∂Φ
∂X= Grad Φ = 1∼ + Gradu , dx = F∼.dX
Le gradient de la transformation F∼ est une caracterisation locale de la
transformation (F∼(X , t = 0) = 1∼)
Le gradient de la transformation 17/75

Le gradient de la transformation
Le gradient en coordonnees cartesiennes orthonormees (e i )i=1,3
dxi = FijdXj , avec Fij =∂xi
∂Xj= δij +
∂ui
∂Xjet F∼ = Fij e i ⊗ e j
dx1 =∂Φ1
∂X1dX1 +
∂Φ1
∂X2dX2 +
∂Φ1
∂X3dX3
dx2 =∂Φ2
∂X1dX1 +
∂Φ2
∂X2dX2 +
∂Φ2
∂X3dX3
dx3 =∂Φ3
∂X3dX1 +
∂Φ3
∂X3dX2 +
∂Φ3
∂X3dX3
dx1
dx2
dx3
=
F11 F12 F13
F21 F22 F23
F31 F32 F33
dX1
dX2
dX3
les composantes de F∼ sont sans dimension physique
Le gradient de la transformation 18/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

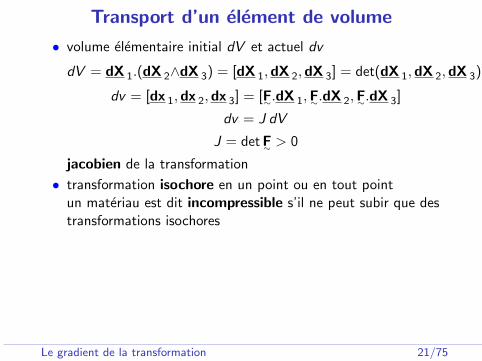
Transport d’un element de volume
• volume elementaire initial dV et actuel dv
Le gradient de la transformation 20/75
Transport d’un element de volume
• volume elementaire initial dV et actuel dv
dV = dX 1.(dX 2∧dX 3) = [dX 1,dX 2,dX 3] = det(dX 1,dX 2,dX 3)
dv = [dx 1,dx 2,dx 3] = [F∼.dX 1,F∼.dX 2,F∼.dX 3]
dv = J dV
J = detF∼ > 0
jacobien de la transformation
• transformation isochore en un point ou en tout pointun materiau est dit incompressible s’il ne peut subir que destransformations isochores
Le gradient de la transformation 21/75

Retour sur la conservation de la masse
ρ dv = ρ0 dV = ρ J dV =⇒ ρ0 = Jρ
interpretation en terme de changement de variable dans uneintegrale sur un domaine materiel D(t)∫
D(t)ρ(x , t) dv =
∫D0
ρ(Φ(X , t), t) J︸ ︷︷ ︸ρ0(X )
dV
avec D0 = Φ−1(D(t))
Le gradient de la transformation 22/75
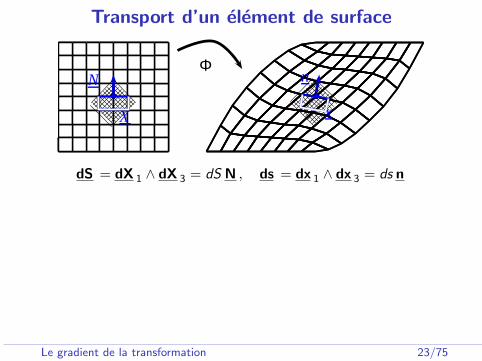
Transport d’un element de surface
Φ
X
x
N n
dS = dX 1 ∧ dX 3 = dS N , ds = dx 1 ∧ dx 3 = ds n
Le gradient de la transformation 23/75

Transport d’un element de surface
Φ
X
x
N n
dS = dX 1 ∧ dX 3 = dS N , ds = dx 1 ∧ dx 3 = ds n
l’element de surface est defini par les directions materiellesorthogonales dX 1 et dX 3 qu’il contient. Le vecteur element desurface dS ne se transforme pas comme une fibre materielle :
ds = J F∼−T .dS
dS et ds (resp. N et n ) ne sont pas constitues des memes pointsmateriels
Le gradient de la transformation 24/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Decomposition polaire du gradient de latransformation
Pour tout tenseur F∼ inversible, il existe deux tenseurs symetriquesdefinis positifs U∼ et V∼ uniques et un unique tenseur orthogonal R∼tels que
F∼ = R∼ .U∼ = V∼ .R∼Si detF∼ > 0, R∼ est une rotation pure (i.e. detR∼ = +1).
R∼ rotation propre (3 composantes) R∼−1 = R∼
T
U∼ ,V∼ deformations pures (6 composantes) U∼T = U∼ , V∼
T = V∼
Le gradient de la transformation 26/75

Decomposition polaire de F∼
F
U
R
R V
Le gradient de la transformation 27/75

Transport d’un triedre principal de U∼• decomposition spectrale de U∼ et V∼
U∼ .V r = λr V r , λr > 0 (no sum), U∼ =3∑
r=1
λr V r ⊗ V r
Les vecteurs propres sont appeles directions principales ou axes
principaux de U∼ , et les valeurs propres deformations principales
v r = R∼ .V r , V∼ =3∑
r=1
λr v r ⊗ v r
• Tout triedre principal de U∼ se transforme en un triedre trirectangle.
L’orientation du triedre deforme par rapport au triedre initial est
donnee exactement par R∼=⇒ il est interessant de suivre une grille dont les aretes (fibres
materielles) sont paralleles aux directions principales de U∼ . C’est le
cas si les triedres trirectangles formes par des aretes de la grille initiale se
transforment en triedres trirectangles. L’orientation du triangle final par
rapport au premier permet de “visualiser” la rotation propre.Le gradient de la transformation 28/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Transformations homogenes
• transformation homogene : F∼(X , t) = F∼(t)
etat initial homogene heterogene
lorsque tous les carres deformes sont superposables, ladeformation est homogene
• consequence sur le champ de deplacement :
x (t) = F∼(t).X + c (t)
pour tout couple de points materiels
x 1 − x 2 = F∼.(X 1 − X 2)
Le gradient de la transformation 30/75

Extension simple
Le gradient de la transformation 31/75

Extension simple
x1 = X1(1 + λ)x2 = X2
x3 = X3
F∼ = 1∼+λe 1⊗e 1, [F∼] =
1 + λ 0 00 1 00 0 1
R∼ = 1∼, U∼ = F∼
Le gradient de la transformation 32/75

Glissement simple
Le gradient de la transformation 33/75

Glissement simple
x1 = X1 + γX2
x2 = X2
x3 = X3
, F∼ = 1∼ + γe 1 ⊗ e 2, [F∼] =
1 γ 00 1 00 0 1
Le gradient de la transformation 34/75

Glissement simple
C∼ = 1∼+γ(e 1⊗e 2+e 2⊗e 1)+γ2e 2⊗e 2, [C∼ ] =
1 γ 0γ 1 + γ2 00 0 1
Les valeurs propres de C∼ sont
λ1 =1
2(γ2 + 2 + γ
√γ2 + 4) = (
1
2(γ +
√γ2 + 4))2
λ2 =1
2(γ2 + 2− γ
√γ2 + 4) = (
1
2(−γ +
√γ2 + 4))2
λ3 = 1
Les vecteurs propres de C∼ et U∼ sont
V 1 =1
2(−γ +
√γ2 + 4)e 1 + e 2
V 2 =1
2(−γ −
√γ2 + 4)e 1 + e 2
V 3 = e 3
Le gradient de la transformation 35/75

Glissement simple
U∼ =
1√1 + (γ/2)2
γ
2√
1 + (γ/2)20
γ
2√
1 + (γ/2)2
1 + γ2/2√1 + (γ/2)2
0
0 0 1
V∼ =
1 + γ2/2√1 + (γ/2)2
γ
2√
1 + (γ/2)20
γ
2√
1 + (γ/2)2
1√1 + (γ/2)2
0
0 0 1
R∼ =
1√1 + (γ/2)2
γ
2√
1 + (γ/2)20
−γ
2√
1 + (γ/2)2
1√1 + (γ/2)2
0
0 0 1
la rotation propre est une rotation autour de e 3 d’angle tan θ = −γ
2
Le gradient de la transformation 36/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Les tenseurs de Cauchy–Green
Φ
X
xdX 1 dX 2
dx 1dx 2
Deformations 39/75

Les tenseurs de Cauchy–Green
Φ
X
xdX 1 dX 2
dx 1dx 2
dx 1.dx 2 = (F∼.dX 1).(F∼.dX 2) = dX 1.F∼T .F∼.dX 2 = dX 1.C∼ .dX 2
le tenseur de Cauchy–Green droit C∼ = F∼T .F∼ instaure une metrique sur Ω0
dX 1.dX 2 = dx 1.B∼−1.dx 2
le tenseur de Cauchy–Green gauche B∼ = F∼.F∼T instaure une metrique sur
Ωt
(C∼ et B∼ sont symetriques et definis positifs, B∼ 6= C∼T !!)
Deformations 40/75

Variation de longueurs
• variation de longueurs
‖dx ‖2 − ‖dX ‖2
• allongement relatif
dX = ‖dX ‖M
λ(M ) =‖dx ‖‖dX ‖
• interpretation des composantes de C∼
λ(e 1)
Deformations 41/75

Variation de longueurs
• variation de longueurs
‖dx ‖2 − ‖dX ‖2 = dX .(C∼ − 1∼).dX = dx .(1∼ − B∼−1).dx
• allongement relatif
dX = ‖dX ‖M
λ(M ) =‖dx ‖‖dX ‖
=√
M .C∼ .M = ‖F∼.M ‖ = ‖U∼ .M ‖
• interpretation des composantes de C∼
λ(e 1) =√
C11 =√
F 211 + F 2
21 + F 231
C11 designe donc le carre de l’allongement du premier vecteur de
base
Deformations 42/75

Variation d’angles
• variation d’angle entre deux elements de fibre materielle
dX 1 = |dX 1|M 1, dX 2 = |dX 2|M 2
dx 1 = |dx 1|m 1, dx 2 = |dx 2|m 2
cos Θ = M 1.M 2
cos θ = m 1.m 2
• angle de glissement γ des directions M 1 et M 2 dans le plande glissement (M 1,M 2)
γ := Θ− θ
Si Θ = π/2 (directions initialement orthogonales)
sin γ =
• interpretation des composantes de C∼ : M 1 = E 1 et M 2 = E 2
sin γ =
Deformations 43/75

Variation d’angles
• variation d’angle entre deux elements de fibre materielle
dX 1 = |dX 1|M 1, dX 2 = |dX 2|M 2
dx 1 = |dx 1|m 1, dx 2 = |dx 2|m 2
cos Θ = M 1.M 2
cos θ = m 1.m 2 =M 1.C∼ .M 2
λ(M 1)λ(M 2)
• angle de glissement γ
γ := Θ− θ
Si Θ = π/2 (directions initialement orthogonales)
sin γ =M 1.C∼ .M 2
λ(M 1)λ(M 2)
• interpretation des composantes de C∼ : M 1 = E 1 et M 2 = E 2
sin γ =C12√C11C22
Deformations 44/75

Retour sur les mouvements de corps rigideUne transformation homogene est appelee mouvement de corpsrigide lorsque la distance entre tout couple de points materielsreste inchangee au cours du mouvement :
∀X 1,X 2 6= 0, ‖x 1 − x 2‖ = ‖X 1 − X 2‖
Deformations 45/75

Retour sur les mouvements de corps rigideUne transformation homogene est appelee mouvement de corpsrigide lorsque la distance entre tout couple de points materielsreste inchangee au cours du mouvement :
(F∼.(X 1−X 2))2 = (X 1−X 2).F∼
T .F∼.(X 1−X 2) = (X 1−X 2).(X 1−X 2)
=⇒ F∼T .F∼ = C∼ = 1∼
Le gradient de la transformation est donc orthogonal direct. C’estune rotation Q
∼(t). La transformation correspondante est
x = Q∼(t).X + c (t)
Deformations 46/75

Mesures de deformation
• candidatsC∼,B∼ ,U∼ ,V∼
• quelques regles supplementaires conventionnelles pour une mesurede deformation :
? elle est symetrique et sans dimension physique;? elle est nulle pour un mouvement de corps rigide et en F∼ = 1∼;? son developpement limite autour de F∼ = 1∼ s’ecrit
12 (H∼ + H∼
T ) + o(H∼ )
H∼ = F∼ − 1∼ = Gradu
• les tenseurs de Green–Lagrange et d’Almansi
E∼ :=1
2(C∼ − 1∼), A∼ :=
1
2(1∼− B∼
−1)
E∼ =1
2(H∼ + H∼
T + H∼T .H∼ )
Eij =1
2(∂ui
∂Xj+
∂uj
∂Xi+
∂uk
∂Xi
∂uk
∂Xj)
• mesures lagrangiennes / mesures euleriennes de deformation
Deformations 47/75

Grandes deformations / grandes rotations
F∼ = R∼ .U∼
Deformations 48/75
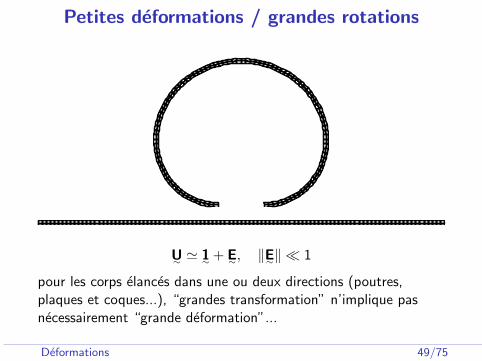
Petites deformations / grandes rotations
U∼ ' 1∼ + E∼, ‖E∼‖ 1
pour les corps elances dans une ou deux directions (poutres,plaques et coques...), “grandes transformation” n’implique pasnecessairement “grande deformation”...
Deformations 49/75

Grandes deformations / petites rotations
representation des petites rotations
[R∼ ] =
cos φ − sin φ 0sin φ cos φ 0
0 0 1
' 1 0 0
0 1 00 0 1
+
0 −φ 0φ 0 00 0 0
R∼ ' 1∼ + ω∼
ω∼ antisymetrique : ω∼T = −ω∼
Deformations 50/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu
Petites deformations / petites rotations
H∼ = Gradu , F∼ = 1∼ + H∼ = 1∼ + ε∼+ ω∼
ε∼ =1
2(H∼ + H∼
T ), ω∼ =1
2(H∼ −H∼
T )
• le contexte des transformations infinitesimales (dans un referentieldonne) :
‖H∼ = Gradu ‖ 1 ⇐⇒ F∼ = O(1∼)
transformation infinitesimale = petite deformation + petite rotation
F∼ = 1∼ + ε∼+ ω∼ ' (1∼ + ω∼).(1∼ + ε∼)
tenseur des deformations infinitesimales εij = 12 (ui,j + uj,i )
tenseur des rotations infinitesimales ωij := 12 (ui,j − uj,i )
• objectif : tenue en service des materiaux et des structures(dimensionnement, fiabilite)
• piege : on peut toujours calculer ε∼ mais il n’a de sens que dans lecontexte infinitesimal...
F∼ = Q∼
=⇒ C∼ = 1∼, E∼ = 0 mais ε∼ =1
2(Q∼
+ Q∼
T )− 1∼ 6= 0 !!!
Deformations 52/75

Etude des deformations dans le contexteinfinitesimal
• C∼ ' 1∼ + 2ε∼, E∼ ' ε∼• variation de volume
dv
dV= detF∼ = det
1 + u1,1 u1,2 u1,3
u2,1 1 + u2,2 u2,3
u3,1 u3,2 1 + u3,3
cas d’une transformation isochore
• variation de longueur
λ(M ) =‖dx ‖‖dX ‖
=√
M .C∼ .M
• variation d’angle
cos θ = m 1.m 2 =M 1.C∼ .M 2
λ(M 1)λ(M 2)
cas de deux directions initialement orthogonales
Deformations 53/75
Etude des deformations dans le contexteinfinitesimal
• C∼ ' 1∼ + 2ε∼, E∼ ' ε∼• variation de volume
dv − dV
dV' div u = trace ε∼
cas d’une transformation isochore : trace ε∼ = 0
• variation de longueur‖dx ‖ − ‖dX ‖
‖dX ‖' M .ε∼.M
si M = e 1, l’allongement relatif est ε11
• variation d’angle
cos θ =M 1.M 2 + 2M 1.ε∼.M 2
(1 + M 1.ε∼.M 1)(1 + M 2.ε∼.M 2)
cas de deux directions initialement orthogonales :γ ' 2M 1.ε∼.M 2
si M 1 = e 1, M 2 = e 2, alors γ ' 2ε12
Deformations 54/75

Application : jauges de deformation
‖dx ‖ − ‖dX ‖‖dX ‖
' M .ε∼.M
Deformations 55/75

Application : jauges et extensometres
Dans une zone “utile” ou la transformation est (quasi–)homogene,
X 2 − X 1 = l0 M
x 2 − x 1 = l m
C11 =l2
l20, E11 =
l2 − l20l20
Dans le contexte infinitesimal
ε11 =l − l0
l0=
δl
l0
Si F∼.M ‖ M ,
F11 = U11 =l
l0
Deformations 56/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Position du probleme de compatibilite
le champ C∼(X , t) caracterise la forme actuelle de tous les petits
parallelogrammes individuels
Compatibilite d’un champ de deformation 59/75

Position du probleme de compatibilite
le champ C∼(X , t) caracterise la forme actuelle de tous les petits
parallelogrammes individuels
Compatibilite d’un champ de deformation 60/75

Position du probleme de compatibilite
A quelles conditions est–il possible de reconstituer le puzzle etcomment passer de
a ?
Compatibilite d’un champ de deformation 61/75
Position du probleme de compatibilite
• Question 1 (theorique) : soit C∼(X ) un champ de tenseursd’ordre 2 symetriques definis positifs, a quelles conditionsexiste–t–il une transformation Φ(X ) telle que
(Grad Φ)T .(Grad Φ) = C∼ ?
Si un tel champ u (X ) existe, le champ de deformation C∼(X )est dit compatible
• Question 2 (theorique, pratique) : si ces conditions sontremplies, de combien different les solutions possibles?
• Question 3 (pratique) : si ces conditions sont remplies,comment reconstituer le(s) champ(s) de deplacement dumilieu si l’on connaıt le champ de deformation?en d’autres termes, connaissant C∼(X ), comment reconstituer R∼(X )
pour connaıtre F∼(X ) et l’integrer ensuite?
Compatibilite d’un champ de deformation 62/75

Un cas particulierTrouver une classe de champs C∼ qui soient systematiquementcompatible?
Compatibilite d’un champ de deformation 63/75

Un cas particulier : les deformations homogenesTrouver une classe de champs C∼(X ) qui soient systematiquementcompatible?
les deformations homogenes sont toujours compatibles :C∼(X ) = C∼0
(les pieces du puzzle ont toutes la meme formeparallelepipedique)
• Si la transformation est homogene (F∼(X ) = F∼0), alors la
deformation est homogenedemonstration basee sur l’unicite de la decomposition polaire
• Si la deformation est homogene (C∼(X ) = C∼0) alors la
transformation est homogeneintuitif mais demonstration plus delicate
Compatibilite d’un champ de deformation 64/75

Un cas particulier : les deformations homogenesTrouver une classe de champs C∼(X ) qui soient systematiquementcompatible?
les deformations homogenes sont toujours compatibles :C∼(X ) = C∼0
(les pieces du puzzle ont toutes la meme formeparallelepipedique)
• Si la transformation est homogene (F∼(X ) = F∼0), alors la
deformation est homogenedemonstration basee sur l’unicite de la decomposition polaire
• Si la deformation est homogene (C∼(X ) = C∼0) alors la
transformation est homogeneintuitif mais demonstration plus delicate
Corollaire : si la deformation de Green–Lagrange E∼ est nulle entout point, alors la transformation est un mouvement de corpsrigide
Compatibilite d’un champ de deformation 65/75

Reponse a la question 2Soit C∼(X ) un champ compatible de tenseurs d’ordre 2symetriques definis positifs.Supposons qu’il existe 2 transformations Φ1(X ) et Φ2(X ) dedeplacements dont C∼(X ) soit le champ des deformations deCauchy–Green droit associe. Quel est le lien entre Φ1 et Φ2?
Compatibilite d’un champ de deformation 66/75

Reponse a la question 2Soit C∼(X ) un champ compatible de tenseurs d’ordre 2symetriques definis positifs.Supposons qu’il existe 2 transformations Φ1(X ) et Φ2(X ) dedeplacements dont C∼(X ) soit le champ des deformations deCauchy–Green droit associe. Quel est le lien entre Φ1 et Φ2?
Reponse : les deux transformations different d’un mouvement decorps rigide
F∼2= Q
∼.F∼1
Φ2(X ) = Q∼.Φ1(X ) + c
Compatibilite d’un champ de deformation 67/75

Reponse a la question 2Soit C∼(X ) un champ compatible de tenseurs d’ordre 2symetriques definis positifs.Supposons qu’il existe 2 transformations Φ1(X ) et Φ2(X ) dedeplacements dont C∼(X ) soit le champ des deformations deCauchy–Green droit associe. Quel est le lien entre Φ1 et Φ2?
Reponse : les deux transformations different d’un mouvement decorps rigide
F∼2= Q
∼.F∼1
Φ2(X ) = Q∼.Φ1(X ) + c
On va repondre aux questions 1 et 3 uniquement dans le contexteinfinitesimal
Compatibilite d’un champ de deformation 68/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu

Compatibilite dans le contexte infinitesimalSoit ε∼(X ) un champ de tenseurs symetriques, a quelles conditionsexiste–t–il un champ de deplacements u (X ) tel que
1
2
((Gradu ) + (Gradu )T
)= ε∼(X ) ?
les 6 champs εij(X ) ne doivent dependre en fait que de la connaissance
de 3 champs ui (X )
Conditions de compatibilite :
∀i , j , k, l , εij ,kl + εkl ,ij = εil ,jk + εjk,il
Compatibilite d’un champ de deformation 70/75
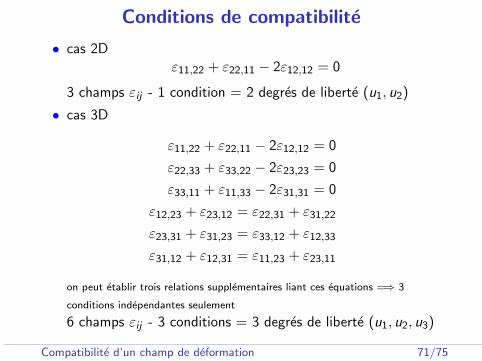
Conditions de compatibilite
• cas 2Dε11,22 + ε22,11 − 2ε12,12 = 0
3 champs εij - 1 condition = 2 degres de liberte (u1, u2)
• cas 3D
ε11,22 + ε22,11 − 2ε12,12 = 0
ε22,33 + ε33,22 − 2ε23,23 = 0
ε33,11 + ε11,33 − 2ε31,31 = 0
ε12,23 + ε23,12 = ε22,31 + ε31,22
ε23,31 + ε31,23 = ε33,12 + ε12,33
ε31,12 + ε12,31 = ε11,23 + ε23,11
on peut etablir trois relations supplementaires liant ces equations =⇒ 3
conditions independantes seulement
6 champs εij - 3 conditions = 3 degres de liberte (u1, u2, u3)
Compatibilite d’un champ de deformation 71/75

Plan
1 Mise en evidence experimentale
2 Le gradient de la transformationTransports convectifsDecomposition polaireExtension et glissement simples
3 DeformationsMesures de deformationsTransformations infinitesimales
4 Compatibilite d’un champ de deformationLe cas general des transformations finiesEquations de compatibilite dans le contexte infinitesimal
5 Bilan : deformation du milieu continu
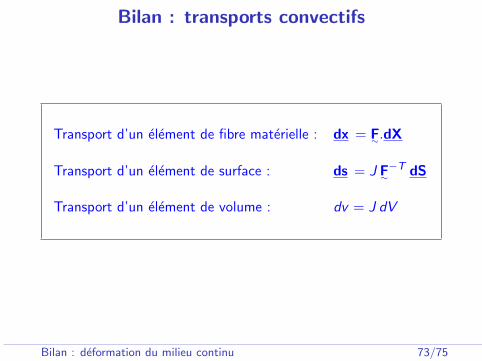
Bilan : transports convectifs
Transport d’un element de fibre materielle : dx = F∼.dX
Transport d’un element de surface : ds = J F∼−T dS
Transport d’un element de volume : dv = J dV
Bilan : deformation du milieu continu 73/75

Bilan : transformations finies
F∼ = R∼.U∼ = V∼ .R∼ gradient de la transformation (detF∼ > 0)
R∼ rotation propre (detR∼ = 1)
U∼ tenseur droit de deformation pure
V∼ tenseur gauche de deformation pure
C∼ := F∼T .F∼ = U∼
2 tenseur de Cauchy–Green droit
B∼ := F∼.F∼T = V∼
2 tenseur de Cauchy–Green gauche
E∼ :=1
2(C∼ − 1∼) tenseur de Green–Lagrange
A∼ :=1
2(1∼− B∼
−1) tenseur d’Almansi
Bilan : deformation du milieu continu 74/75
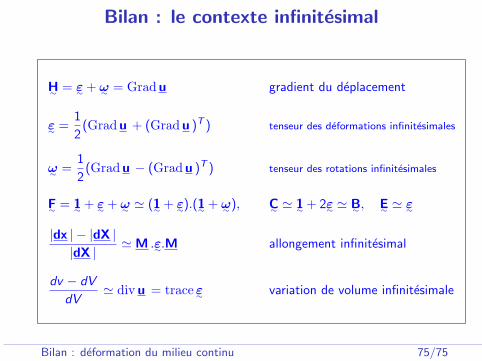
Bilan : le contexte infinitesimal
H∼ = ε∼+ ω∼ = Gradu gradient du deplacement
ε∼ =1
2(Gradu + (Gradu )T ) tenseur des deformations infinitesimales
ω∼ =1
2(Gradu − (Gradu )T ) tenseur des rotations infinitesimales
F∼ = 1∼ + ε∼+ ω∼ ' (1∼ + ε∼).(1∼ + ω∼), C∼ ' 1∼ + 2ε∼ ' B∼ , E∼ ' ε∼
|dx | − |dX ||dX |
' M .ε∼.M allongement infinitesimal
dv − dV
dV' div u = trace ε∼ variation de volume infinitesimale
Bilan : deformation du milieu continu 75/75





























