-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
1/7
Tractors in Spain -- A Dynamic Reanalysis
Author(s): Dani Gamerman and Hlio S. MigonSource: The Journal of
the Operational Research Society, Vol. 42, No. 2 (Feb., 1991), pp.
119-124Published by: Palgrave Macmillan Journalson behalf of the
Operational Research SocietyStable URL:
http://www.jstor.org/stable/2583176.
Accessed: 27/03/2014 05:49
Your use of the JSTOR archive indicates your acceptance of the
Terms & Conditions of Use, available
at.http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars,
researchers, and students discover, use, and build upon a wide
range of
content in a trusted digital archive. We use information
technology and tools to increase productivity and facilitate new
forms
of scholarship. For more information about JSTOR, please contact
[email protected].
.
Palgrave Macmillan Journalsand Operational Research Societyare
collaborating with JSTOR to digitize,
preserve and extend access to The Journal of the Operational
Research Society.
http://www.jstor.org
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/action/showPublisher?publisherCode=palhttp://www.jstor.org/action/showPublisher?publisherCode=orshttp://www.jstor.org/stable/2583176?origin=JSTOR-pdfhttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/stable/2583176?origin=JSTOR-pdfhttp://www.jstor.org/action/showPublisher?publisherCode=orshttp://www.jstor.org/action/showPublisher?publisherCode=pal
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
2/7
J. OpI Res. Soc. Vol. 42, No. 2, pp. 119-124, 1991Printed in
Great Britain. All rights reserved 0160-5682/91 $3.50 +
0.00Copyright ? 1991 Operational Research Society Ltd
Tractors in Spain A Dynamic ReanalysisDANI GAMERMAN and HELIO S.
MIGONUniversidade Federal do Rio de Janeiro, Brazil
This paper presents a class of models obtained from the logistic
curve to forecast stocks of goods. Thedynamic approach allows
variation of the parameters with time, thus allowing the model to
adapt forchanges. The observations are kept at the original scale
and the model is reformulated in terms of theparameters.On-line
estimates, forecasts and measures of performance are obtained. The
methodology isapplied to the stock of tractors in Spain. Fitted
figures are obtained and compared with those fromprevious work.Key
words: dynamic forecasting, logistic curve, tractors, Spain
INTRODUCTIONThe data on the stock of tractors in Spain have been
the subject of study of many articles in thisjournal. All the
models proposed are derived from the logistic growth curve. This
seems to providea good model for the stock of durable goods as it
tends to reach a saturation level. The modifi-cations adopted
always allow for such characteristics. Mar-Molinero' initially
adopted the basiclogistic curve given byyt = At+ et where ut= 1
where et are normally distributed errors with variance a2 and a,
b, 0 > 0. Upon inspection of theautocorrelation of fitted
residuals, the model was extended to an AR(1) for et. Oliver2
extended theabove model by including an additive intercept. Later,
Harvey3 suggested the use of a variation ofthe model employing
difference operations. Although described as a local trend model,
it keepsone of the key parameters of the model, 0, constant as in
(1). Oliver4 studied the problem with adifferent model. It assumed
a fixed number of buyers deciding to buy the considered item (in
thiscase, tractors) with common probability function F(t). It is
not difficult to show that a logisticmean response is obtained for
this binomial model with F(t) = a/(a + bqt). However, Oliver used
aslightly different form for F. All these models have in common the
assumption that the parametersdo not change with time.-Our approach
is based on dynamic models which are obtained by allowing the
parameters in(1) to be time-dependent. A simple relationship is
established between parameters in successivetimes and inference can
be carried out. Forecasts are produced and the fit can be assessed.
It willbe shown that simple models provide a better fit than do all
models mentioned previously.Another approach to dynamic modelling
was proposed by Meade.' As in Harvey, the meanresponse function is
algebraically manipulated and described iteratively. Upon
identification ofobservations with their mean responses, different
parametrizationsare obtained. Our approach isalso based on
transformations but these are performed only on the parameters; the
observationsare unchanged.The main advantage of dynamic modelling
is the allowance for changes. It may well be that 0changes
(probably smoothly) with time as the environment changes (see
Meade6). More generally,all the model parameters are subject to
changes with time. The saturation level of the stock ofgoods (or
the number of buyers in Oliver's terminology) is depressed if the
economy is undergoinga period of recession. Models of such economic
series should in general be capable of adaptation.Dynamic models
are designed for this situation. See Migon and Gamerman7for an
application.The next section outlines the basic ideas of the model,
with a more detailed description of theinference procedure left to
the appendix. Improvements on and generalizations of the basic
logisticmodels are described and, after a brief discussion on
measures of performance, the data on thestock of tractors in Spain
are reanalysed.Correspondence:D. Gamerman,nstitute de Matematica,
UFRJ, Caixa Postal 68530, 21944 Rio de Janeiro, RJ, Brazil
119
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
3/7
Journal of the Operational Research Society Vol. 42, No.
2DYNAMIC MODELLING
The theory of dynamic models in forecasting was put forward by
Harrison and Stevens.8 Itinvolves the specification of two
components: the observation equation and the system equation.The
former is given for logistic curves by (1) with the important
difference that the parameters (a,b, 4)) re indexed by t. The local
description is evident now, since for each time t a different
logisticcurve is considered. The second component of the model
provides the link between the differentcurves. In general, the
curves for each time period are not entirely different but similar
in thatsmall perturbations are expected to promote (minor) changes
in the form of successive logisticcurves. This is parsimoniously
modelled by a random walk in the parameters as follows:
at = at1 + V1t,bt= bt- 1 + V2t, (2)At = Ot-1 + v3t,
where v1t, v2t and v3t are the perturbations to the parameters.
They are generally zero meanrandom variables with some known
covariance structure. The larger the variances of the vts themore
different are the logistic curves. If the variances are zero, the
parametersremain constant intime and the global model (1) is
obtained.The model in (1) is typically non-linear in the
parameters. Exact results are not possible toobtain and alternative
procedures should be pursued. One possibility is to seek parametric
trans-formations to simplify the structure of the model. This is
described briefly in the appendix alongwith an outline of the
inferenceprocedure.A fullerdescription is given in Migon and
Gamerman.]The main outputs are:(a) one- (or many-) steps-ahead
predictions from any given time point. This is based on the meanof
predictive distribution of Yt+kIDt, k = 1, 2, . . ., where Dt is
the information set containingall observations up to time t;(b)
on-line parametric trajectories based on the mean and variance of
the posterior distribution ofthe parametersat all time points given
in the appendix by equation (A4). The trajectoryof ( isexamined via
the means of the distributions of AtIDt, Vt;(c) fitted values of
the observed data series given by the mean response estimate based
on all datainformation. This estimate is obtained from the mean
value of the parameters given in equa-tion (A5).It is important to
note that, despite the local behaviour, the saturation level a- can
still beestimated at all times. In the dynamic setting the
saturation level is allowed to change in time andthereforedifferent
estimates are obtained for each time. The main interest is to
obtain the estimateat the end of the data series, i.e. given Dn.
Another useful addition to the model adopted by
Mar-Molinero is the use of variance laws to give different
weight to the observations. There aremany possible weighting
schemes and we adopted the Poisson law of variance where V[et] =ut
2. The variance increase with the mean is to be expected from count
data, as is the case withthe stock of goods in general. Oliver4
showed the equivalence of his binomial model to a Poissonmodel for
Yt As the data magnitude is large, it can be approximated by normal
distributions withthe same variance law.The model also provides for
an estimation of U2. As with the other parameters,it is allowed
tochange with time owing to small perturbations. These are present
to reflect the influence of theenvironment (or economic
background)on the dispersion of the data.
GENERALIZED LOGISTIC CURVESThe logistic curve can be embedded in
the more general family generated by
pi= a- b(Pt. (3)When i = -1, the logistic curve is obtained. The
Gompertz curve (A= 0) is obtained by takingthe logarithm of the
mean response and is similar in shape to the logistic curve. This
gener-alization is given in Gregg et al.9 and is used here to
assess the performance of the model as Avaries. In our assessment,
A s taken as -1, 0 and 1. The latter is the modified exponential
curve,
120
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
4/7
D. Gamerman and H. S. Migon-Tractors in Spain-A Reanalysiswhich
was not appropriate due to the nature of the data. Observe that as
t -* oo, if 0 < + < 1,
t -* a. Therefore,all' (ea, when A= 0) is the limiting value or
saturation level of the series provi-ded 0 < 0 < 1.
Otherwise, no such limit exists.DATA ANALYSIS
The data consist of 26 yearly figures on tractor ownership in
Spain given by Mar-Molinero.'The data were analysed with the three
models described in the previous section. The prior dis-tribution
for the parameters was centred around values within the range of
the data with largevariances. The prior mean for 0 was 0.9, with an
associated standard deviation of 0.2. Thevariances in equation (2)
were set using the discount approach of Ameen and Harrison 0
withdiscount values 0.9.After analysing the data, final estimates
for 0 and al/2 were obtained. These are reported inTable 1. The
estimates for the logistic model are in the region of the estimates
obtained by pre-vious authors. The estimate of 0 for the Gompertz
model is larger implying a larger estimate forthe saturation level.
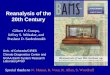
The on-line estimates of 0 for the two models considered are shown
in Figure1 with corresponding confidence limits. It shows that
despite their common prior setting themodel learns from the data
and processes the information in different ways. There is a
suggestionthat the trajectories increase with the value of A.TABLE
1. Summary of estimation
Estimate Estimate of Sum of squaredModel of 0 saturation level
fitted residualsLogistic (1) 0.823 52.08 4.98Logistic with 0.829
53.72 4.72additive interceptLogistic with 0.823 52.08 2.57
AR(1) errorsLogistic with 0.826 55.84
4.40differenceoperatorBinomial 0.840 55.49 n/aDynamic/Gompertz
0.932 93.44 1.88Dynamic/logistic 0.835 56.09 1.51
There are many ways to measure the performance of a model. One
could use a long-termforecast as the basis, but a simple and
effective scheme is to consider one-step-ahead forecasts.They can
be compared with data forming a set of one-step-ahead forecast
residuals utgiven byt = t- yt = Yt E[ytIDt-,], t = 1, 2, ..., n
-1.
n-1It is common to use E 2 as a performancemeasure. Another
approach is to consider the fit oft= 1the model to the data and
measure the model by how well it adjusts to the observed data. A
set offitted residuals fitgiven byfat= yt - t = yt -E[pt IDJ] t =
1, ..,n,
n-1is now formed. The model is then evaluated by consideration
of E u2. Measures based on predic-t= 1tion, which is essentially an
extrapolative fit, should be preferredin forecasting system.
Neverthe-less, fitted figures are also presented here for the
assessment of models relative to those previouslyused. The fits
obtained with the two dynamic models are better than ever before,
as can be seenfrom Table 1. The sums of squared forecast residuals
are 14.26 and 13.18 for the Gompertz andlogistic models,
respectively. These models have similar performance in terms of fit
and predictionand therefore one cannot be ruled out in favour of
the other despite the difference evidenced inestimation. The fitted
figures are substantially lower than those obtained with forecast
errors,which stresses the additional difficulty associated with
prediction.
121
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
5/7
Journal of the Operational Research Society Vol. 42, No.
2Logistic model1.10 _
1.00 _0.90_0.80 -0.70 -0.60 l l l l l l1950 1955 1960 1965 1970
1975 1980
Year
Gompertz model1.201.10 -1.00 '0.900.80 -0.70 _0.60 | I l l1950
1955 1960 1965 1970 1975 1980
YearFIG. 1. 4 estimates: mean, ; 2 s. d. limits,- -
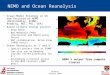
Figure 2 shows the one-step-ahead forecasts for yt, t = 1, ...,
n, with confidence bounds for theGompertz and logistic models. The
performance is considered satisfactory for both, as all
thehistorical data is included in the narrow confidence limits
around the forecasts. The figure alsoshows forecasts up to six
years ahead at the end of the data. The effect of the discount
factors canbe appreciated here. They downweigh the data information
and, when one predicts further intothe future,these are less
important. As a result, the confidence band gets larger and
larger.The residual autocorrelation was also analysed. This was
also motivated by the improvementon the fit obtained by
Mar-Molinero after allowing for an AR(1) error structure. Fitted
andforecast residuals can be-considered in the dynamic approach.
For the logistic model these wereestimated as 0.43 and 0.58
respectively,whereas for the Gompertz model these were 0.45 and
0.66.This again shows similarities in both models. The
autocorrelations are not negligible, as wasexpected for cumulative
series, but the fit of the model was considered satisfactory and in
thename of parsimony the models remained unchanged.
SUMMARYThis paper provides an alternative way of analysing the
data of the tractors in Spain. Thedynamic Bayesian methodology
leads to an adaptive procedure which enables calculation
ofparameter estimates, prediction and implementation of many
additional features. This is easily
achieved within the context of the method.Simple models were
used and results show the improvement obtained. The key element is
therecognition that dynamic models are essential to the study of
time series data. In fact, data setsbearing some indexation on time
or any other variable subject to environmental changes shouldbe
approached in the same way.The use of the logistic curve to model
the purchase of goods in a population is well known inthe
literature. Despite their non-linear behaviour, approximating
techniques efficiently simplify thecomputations. (A simple APL
program provides the results of the analysis in a few seconds on
a122
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
6/7
D. Gamerman and H. S. Migon-Tractors in Spain-A
ReanalysisLogistic model60.00 -
40.00 - -n/
--
20.00 - X
0.001950 1955 1960 1965 1970 1975 1980 1985Year
Gompertz model60.00 -
/ /////0.00 _-,/
/X/'
20.00 _
0.001950 1955 1960 1965 1970 1975 1980 1985Year
FIG.2. Forecasts: data, x; forecasts, ; 1.5 s. d. limits, -
-.
microcomputer.)Improvementsin the fit can be obtained through
techniques such as intervention,incorporation of expert opinion and
further elaboration of the model. These are features of thedynamic
approach and despite not being required for this application can be
readily accessedwhenevernecessary.APPENDIX
Reparametrization and Inference ProceduresConsider a vector
sequence {01, 02, 03}t specifiedby
01,= t ,t -l + 02,t-1 (Al)02, = 03,t-102,t-1 (A2)03,, = 03, t- 1
(A3)
that can be concisely written as Ot = G(Ot i). 01 is the current
level to which an increment 02 isadded. This increment is inflated
or deflated by 03. Proceeding iteratively backward in time, by(Al)
and (A2) at t - 1,01,t = [01,t-2 + 02,t-2] + 03,t-202,t-2
= 01,t-2 + 02,t-2(1 + 03,t-2)= [01,t-3 + 02,t-3] + [03,t-3 +
02,t-3](l + 03,t-3), by (Al), (A2) and (A3) at t -2= 01,t-3 +
02,t-3(l + 03,t-3 + 03,t-3).
123
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AMAll use subject to JSTOR Terms and Conditions
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp
-
8/12/2019 Tractors in Spain- A Dynamiv=c Reanalysis
7/7
Journal of the OperationalResearch Society Vol. 42, No. 2If the
process is continued up to time t = 0,
01, t = 01, 0 + 02, (1 + 03,0 + 03 + 3*+ 0g)t- 1
= 01,0 + 02,0 E O03,0j=0= 01, 0 + 02, 0 X 1 01 -03, 0= 01,0 +
2,0 - 1 0, 03,0
Upon identification of a = 01, + 02, /(1 - 03, ) b =_ 02, 0/(
-03, o) and + = 03, 0, the originalparametrizationin (3) is
obtained. The parametric description is completed by setting ut =
01, t toreplace equation (3). The system equation becomes dynamic
by addition of a three-dimensionalperturbation ot to G(Ot-1).The
relations (A1)-(A3) are assumed to hold on average.Under this
parametrization,the observation equation becomesyt = pt + et where
u' = FO and et .N(0, U21ut)where Ft = (1, 0, 0) is a row vector.
Setting mt = E[OtIDt] and r2Ct = V[Ot Dt, a2], one canobtain a
recursive relation to update mean and variance of parametric
distribution by Kalmanfilter type equations:
Mt= G(mt-1) + stq 1(gt '4),Ct = Rt - s s(1 - pt/qt)/qt,
(A4)where st = R F qt= R = G'(mt -1)Ct - 1 G'(m_1)]T + Wt. Wt=
V[Cot], gt = E[jiI Dt] andPt= V[,ui Dt]. G' is the matrix of
derivatives of G with element Gij= aGi/aOj,1 < i, j < 3.
Esti-mates of a, b and 0 are calculated from components of mt.
The variance U72 is also sequentially updated via a gamma
distribution with parameters ct=J Ot-1 + 2 and fit = 3vft-l + ui/2
where bvis the variance discount factor set in the applicationas
0.98 and it is the standardizedforecast residual at time t.The
information is redistributed back via a smoothing backward
algorithm. This algorithmsuccessively relatesm' = E[OtIDj and r2C,=
V[Ot D, a2] viamn = mt + Lt[mn+ 1 -G(mt)],Cn = Ct - Lt[Rt- Cn+1]Lf,
(A5)
whereLt = Ct[G'(mt + 1)] TR-+1-
Acknowledgements-We are grateful to the referees for useful
comments. This research was supported by grants fromCNPq and
FAPERJ.
REFERENCES1. C. MAR-MOLINERO (1980)Tractors in Spain: a logistic
analysis. J. OplRes. Soc. 31, 141-152.2. F. R. OLIVER (1981)
Tractors in Spain: a further logistic analysis. J. OplRes. Soc. 32,
499-502.3. A. C. HARVEY (1984)Time series forecasting based on the
logistic curve. J. Opl Res. Soc. 35, 641-646.4. R. M. OLIVER (1987)
A Bayesian model to predict saturation and logistic growth. J.
OplRes. Soc. 38, 49-56.5. N. MEADE (1985) Forecasting using growth
curves-an adaptative approach. J. OplRes. Soc. 36, 1103-1115.6. N.
MEADE (1988) Forecasting with growth curves-the effect of
errorstructure.J. of Forecasting 7, 235-244.7. H. S. MIGON and D.
GAMERMAN (1989) Generalised exponential growth models: a Bayesian
approach. TechnicalReport No. 41, LES/IM, Universidade Federal do
Rio de Janeiro.8. P. J. HARRISON and C. F. STEVENS (1976) Bayesian
forecasting (with discussion). J. R. Statist. Soc. B., 38,
205-247.9. J. V. GREGG, C. H. HASSEL and T. J. RICHARDSON (1964)
Mathematical Trend Curve: An Aid to Forecasting. Oliver &Boyd,
Edinburgh.10. J. R. M. AMEEN and P. J. HARRISON (1985) Normal
discount Bayesian models. In Bayesian Statistics 2 (J. M. BER-
NARDO, M. H. DEGROOT, D. V. LINDLEY and A. F. M. SMITH, Eds.)
University Press, Valencia.
124
This content downloaded from 103.24.98.179 on Thu, 27 Mar 2014
05:49:03 AM
http://www.jstor.org/page/info/about/policies/terms.jsphttp://www.jstor.org/page/info/about/policies/terms.jsp