Embed Size (px)
Citation preview
TPS: A Time-Based Positioning Scheme for outdoor Wireless
Sensor Networks
Authors: Xiuzhen Cheng, Andrew Thaeler, Guoliang Xue, Dechang ChenFrom IEEE INFOCOM 2004
Outline
Introduction Overview of Location Detection
Techniques
Outline
Introduction– The challenge of Location Discovery– Overview of TPS
The challenge of Location Discovery
The algorithm must be distributed and localized ( scalable ).
The protocol must has low communication and computation overhead
The positioning functionality should not increase the cost and complexity of the sensor
The location detection scheme must be robust. TPS proposed in this research is designed to meet
these challenges.
Overview of Location detection Scheme
Two phase of major current sensor location detection schemes :
1. Range or angle measurement
2. Calculations Some schemes perform a refinement
phase
Types of Existing Approaches
Time based methods– Time-of-Arrival (ToA)– Time-Difference-of-Arrival (TDoA)
Received-Signal-Strength-Indicator (RSSI) Angle-of-Arrival (AoA) Range estimation use network connectivity
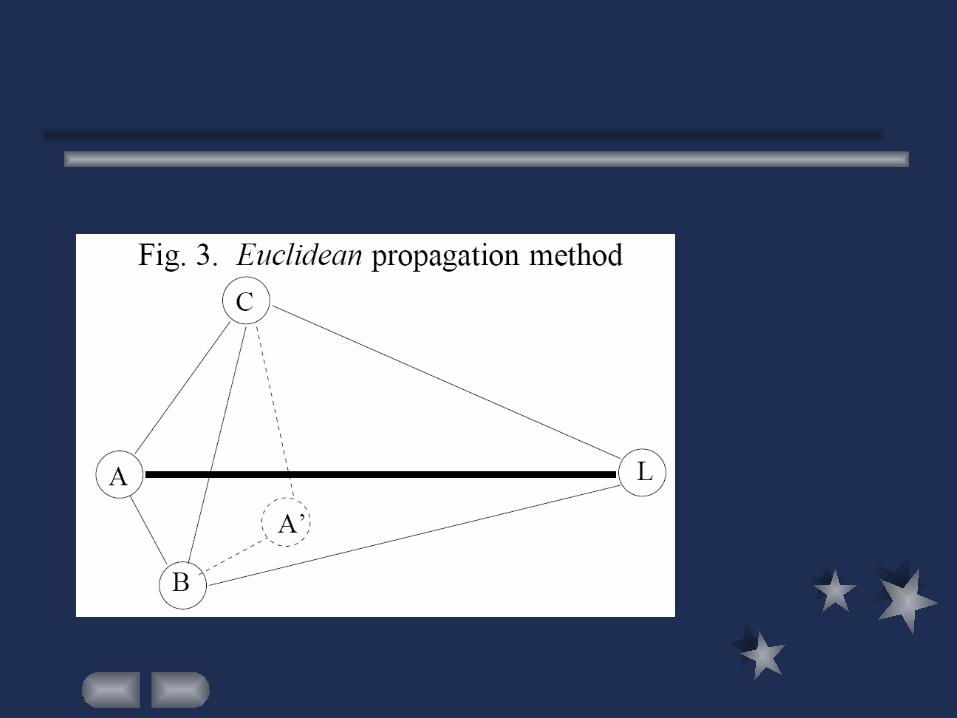
– DV-hop– DV-distance– Euclidean
ToA (Time-of-Arrival)
Processing delays and non-LOS propagation can introduce errors
Requires synchronization to accurately measure time-of-flight.
TDoA (Time-Difference-of-Arrival)
RSSI (Received-Signal-Strength-Indicator)
Computes distance based on transmitted and received power levels and a radio propagation model.
RSSI is mainly used with RF signals. Due to multipath fading ,RSSI can be
inaccurate .
AoA (Angle-of-Arrival)
The calculations of triangulation is simple. It’s difficult to measure accurately when a
sensor is surrounded by scattering objects
Sensors or BS should equip with directive antennas or antennae arrays, which may be prohibitive due to cost and form factors.
Overview of TPS
Based on TDoA (Time-Difference-of-Arrival) of RF signals measured locally at a sensor to detect range differences from the sensor to 3 BSs.
These range differences are averaged over multiple beacon intervals before they are combined to estimate the sensor location through trilateration.
Overview of TPS
Not iterative Refine position estimates by averaging
time difference measurements prior to calculating position.– This averaging requires less
computation than repeatedly solving linear system matrices, least squares or multilateration algorithms.
Using network connectivity
If a sensor can not receive signals from enough BSs,– ≥ 2 for AoA– ≥ 3 for ToA, TDoA, and RSSI
none of the previous techniques will work. Network connectivity can be used for
range estimation
DV-hop
BSs flood their positions to all nodes in the network.
Sensors compute the minimum distance in hops to several base stations.
BSs compute an average distance per hop to other BSs.
BSs then flood this information to the whole network allowing nodes to calculate their positions.
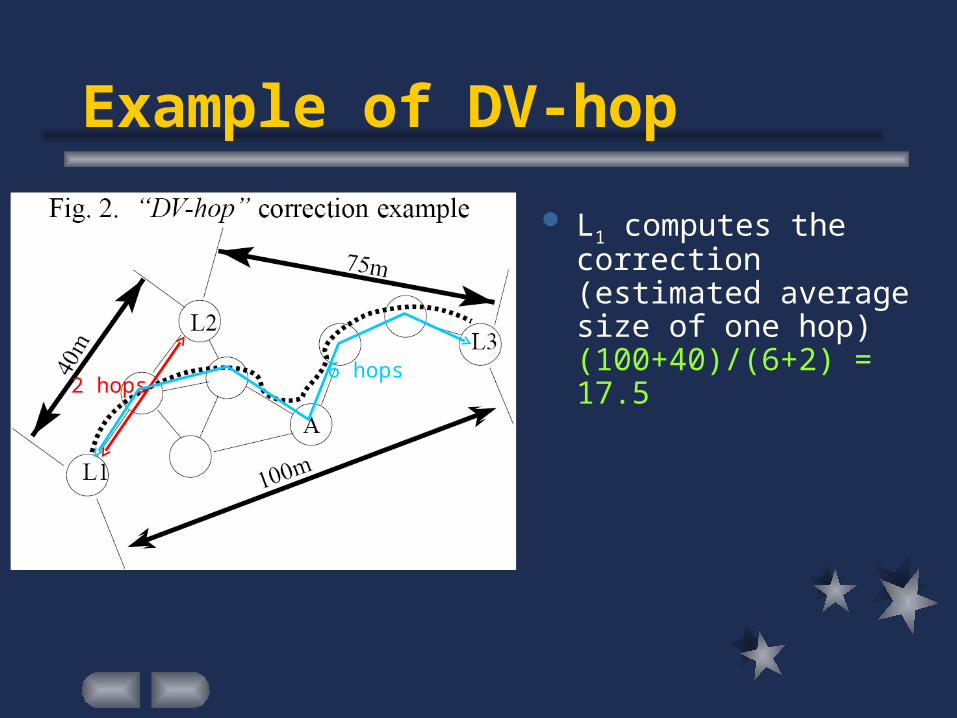
Example of DV-hop
L1 computes the correction (estimated average size of one hop) (100+40)/(6+2) = 17.5
2 hops6 hops
DV-distance
DV-distance replaces hop counts with cumulative range estimates in meters estimated from RSSI.

AHLoS
A TDoA based scheme BSs transmit both ultrasound and RF signals
simultaneously. The RF signal is used for synchronization purposes. A sensor will measure the difference of the arrival
times between the two signals and determine the range to the base station.
Multilateration is applied to combine range estimates to generate location data.
AHLoS provides fine-grained localization capability.
Ultrasound transceivers can only cover a short range (several meters)
large numbers of base stations may be required to cover large areas.
Multilateration








Advantages of TPS
Offers scalability - Sensors independently compute their positions.
Requires no time synchronization - using a local clock
Sensors do require the ability to measure the difference in signal arrival times with precision– No requirements for an ultrasound receiver,
second radio or specialized antennae at BS or sensors.
Advantages of TPS
The computation overhead is low– Multilateration based systems require matrix
operations to optimize the objective functions No communication overhead
– Sensors listen passively and make no radio transmissions.
– BS transmit all the beacon signals. – This conserves sensor energy and reduces RF
channel use.