Embed Size (px)
Citation preview

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
GNSS Research Centre, Mathematical Geodesy and Positioning Department of Spatial Sciences, Dept of Earth Obs & Space Systems (DEOS) Curtin University of Technology, Perth, Australia Delft University of Technology, Netherlands
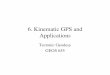
Towards a Unifying Framework for GNSS Ambiguity Resolution
Peter J.G. Teunissen
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
210−×
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
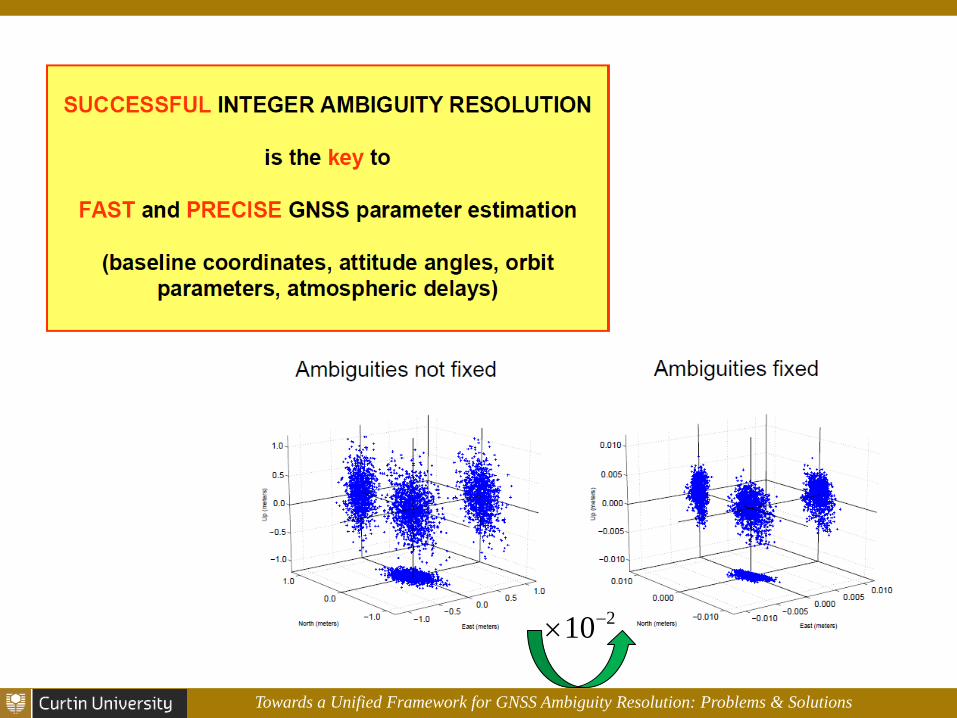
GNSS Model = Mixed Integer Model
1. Float solution:
2. ‘Integer’ mapping
3. Fixed solution
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
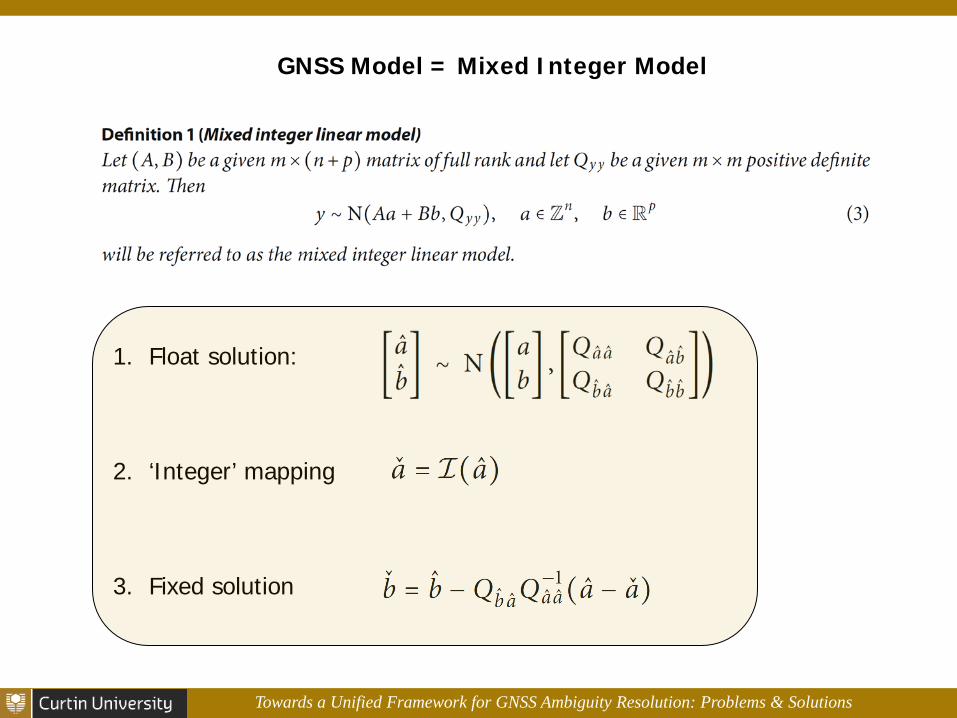
3 Classes of ‘Integer Estimators’ 1. Integer Estimators (I )
2. Integer Aperture Estimators (IA )
3. Integer Equivariant Estimators (IE )
Unifying Estimation Principles for Integer Inference

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
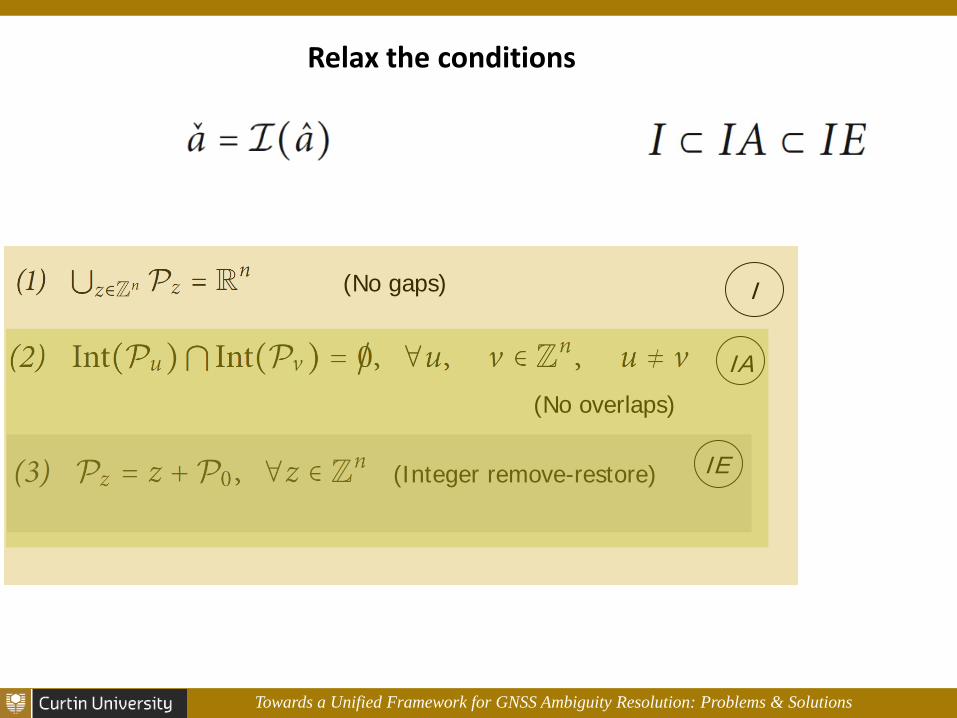
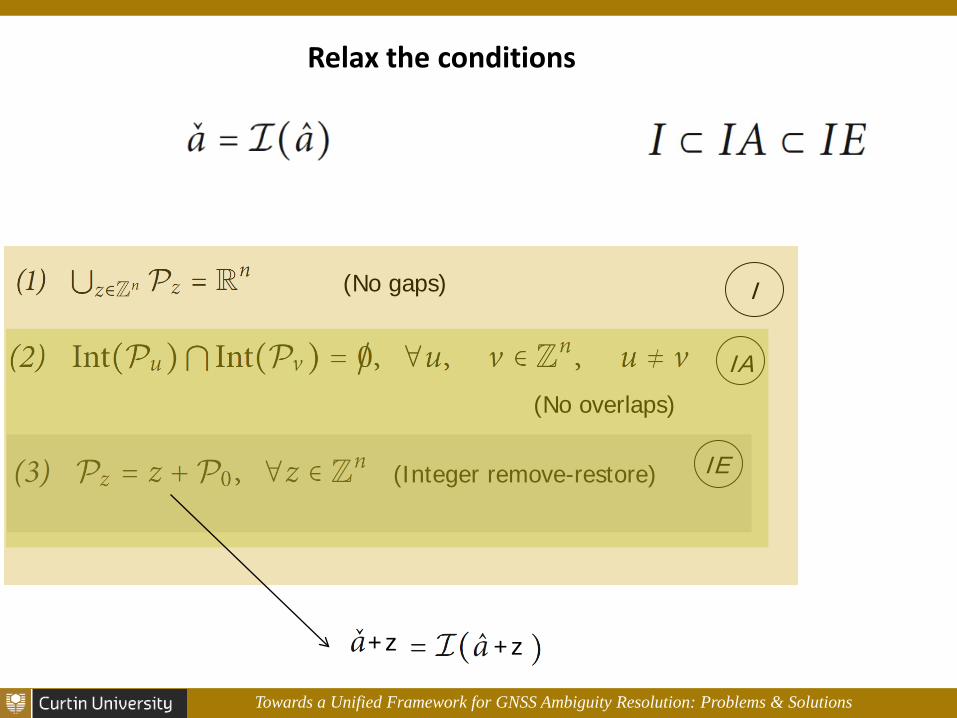
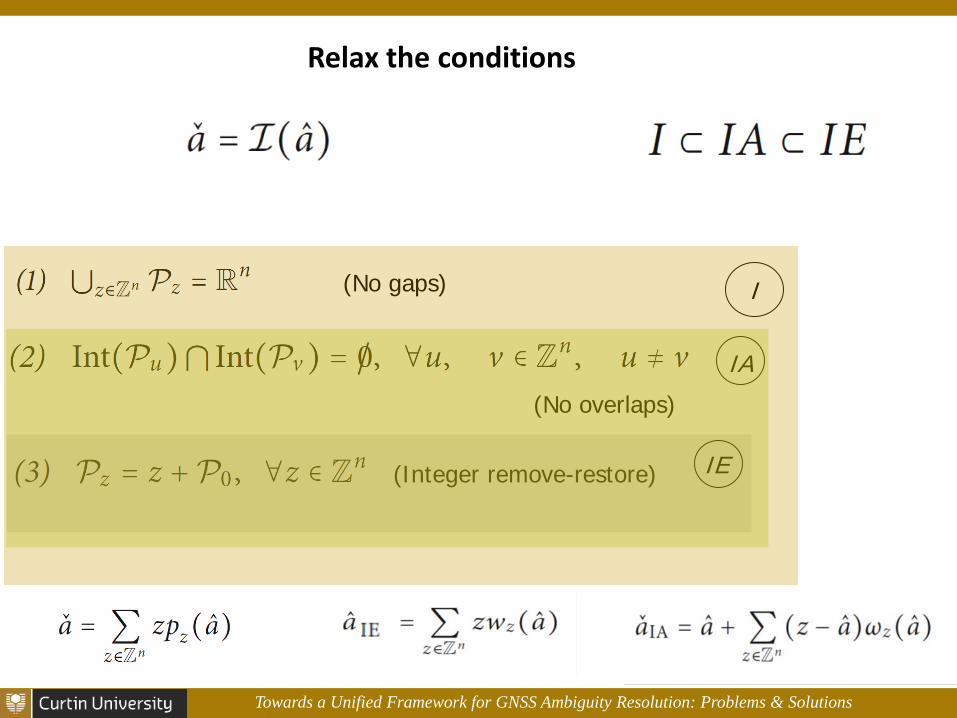
(No gaps)
(No overlaps)
(Integer remove-restore)
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
(No gaps)
(No overlaps)
(Integer remove-restore)
I
IA
IE
Relax the conditions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
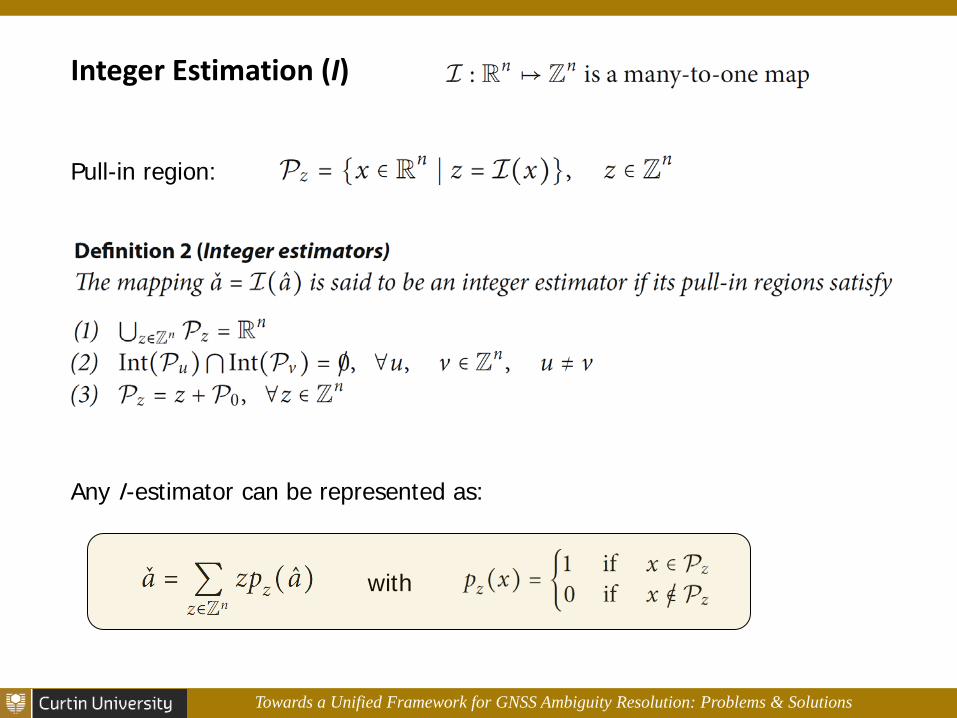
Integer Estimation (I)
Pull-in region:
Any I-estimator can be represented as:
with
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
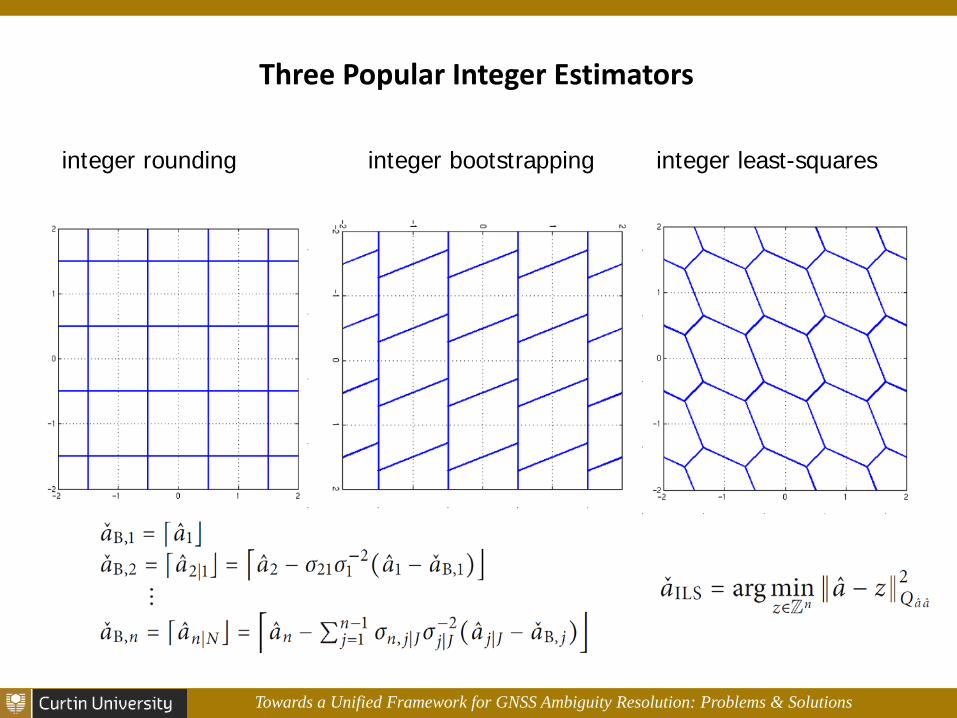
integer rounding integer bootstrapping integer least-squares
Three Popular Integer Estimators

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
Ambiguity PMF and Ambiguity Success-Rate

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
Importance of ambiguity success-rate
Distribution of the Baseline
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
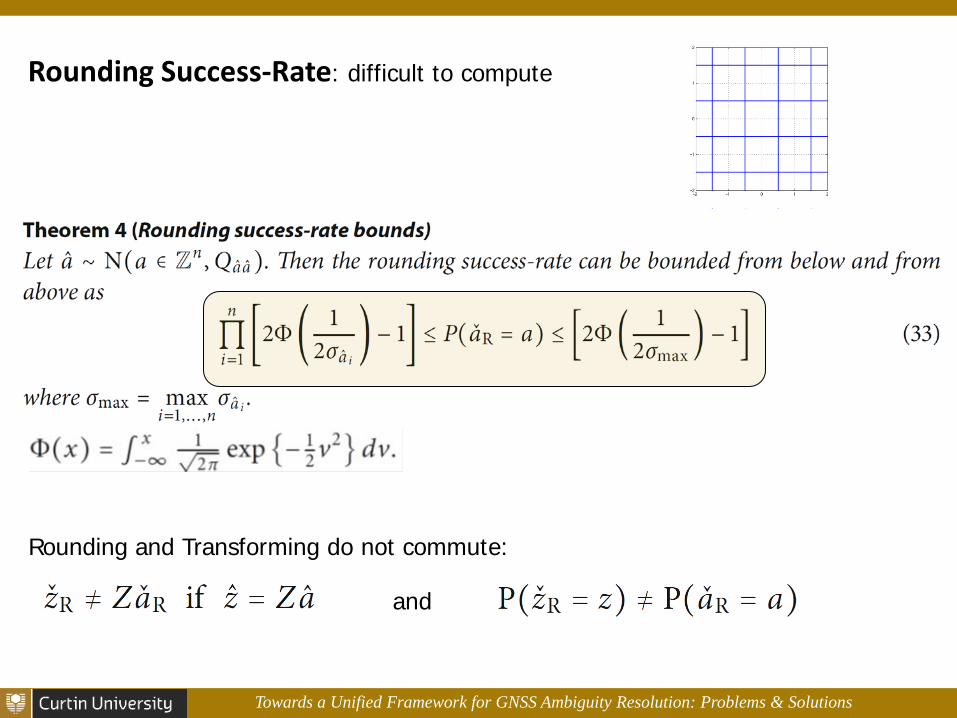
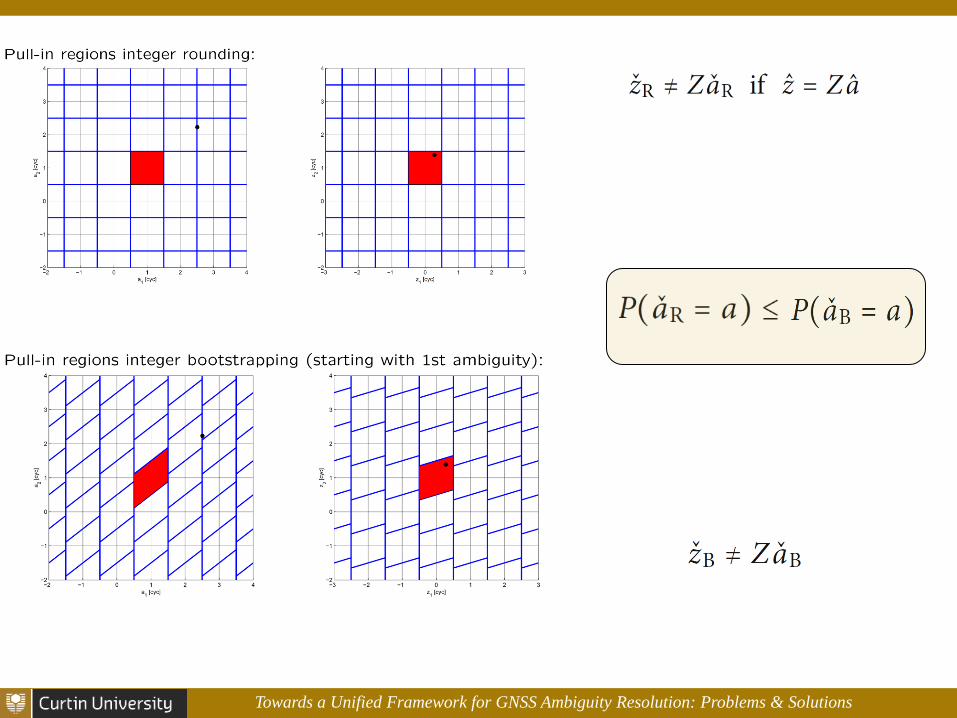
Rounding Success-Rate: difficult to compute
Rounding and Transforming do not commute:
and
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
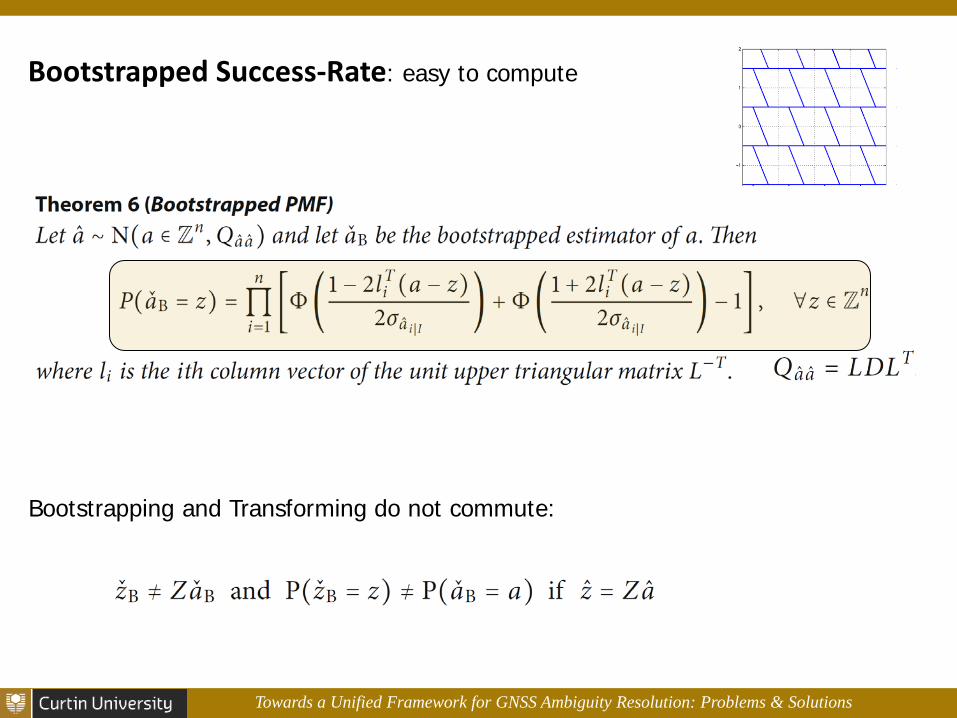
Bootstrapped Success-Rate: easy to compute
Bootstrapping and Transforming do not commute:
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
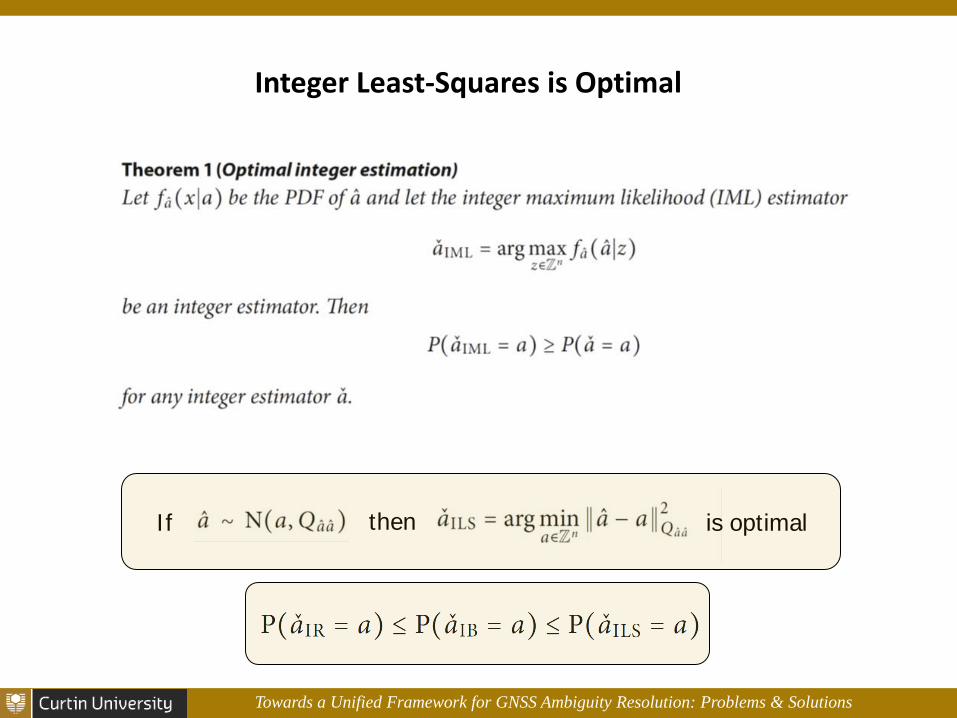
Integer Least-Squares is Optimal
If then is optimal
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
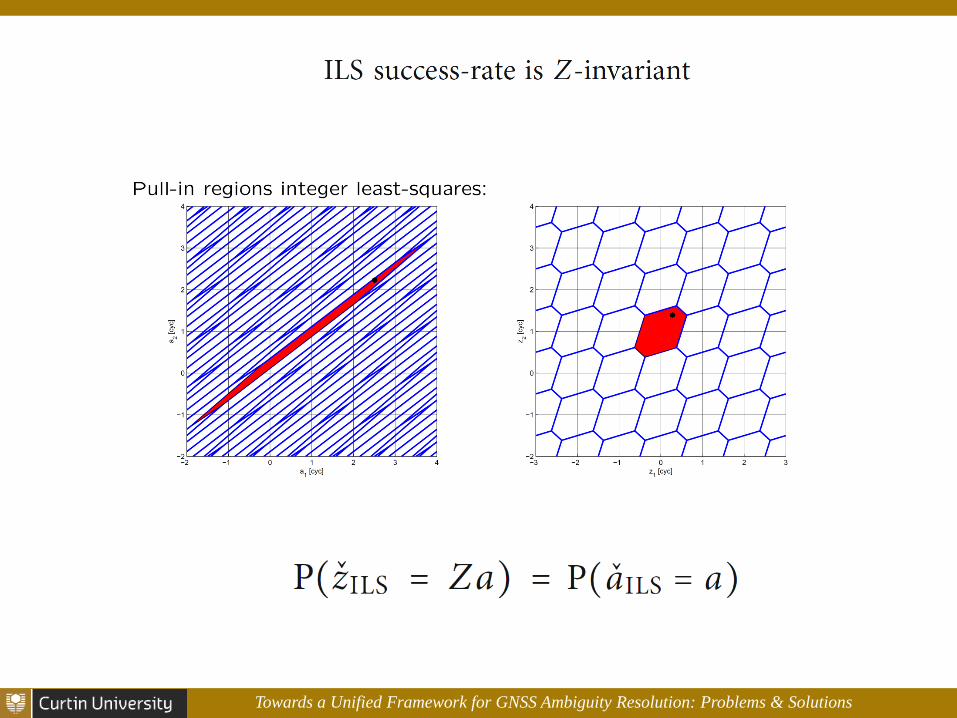
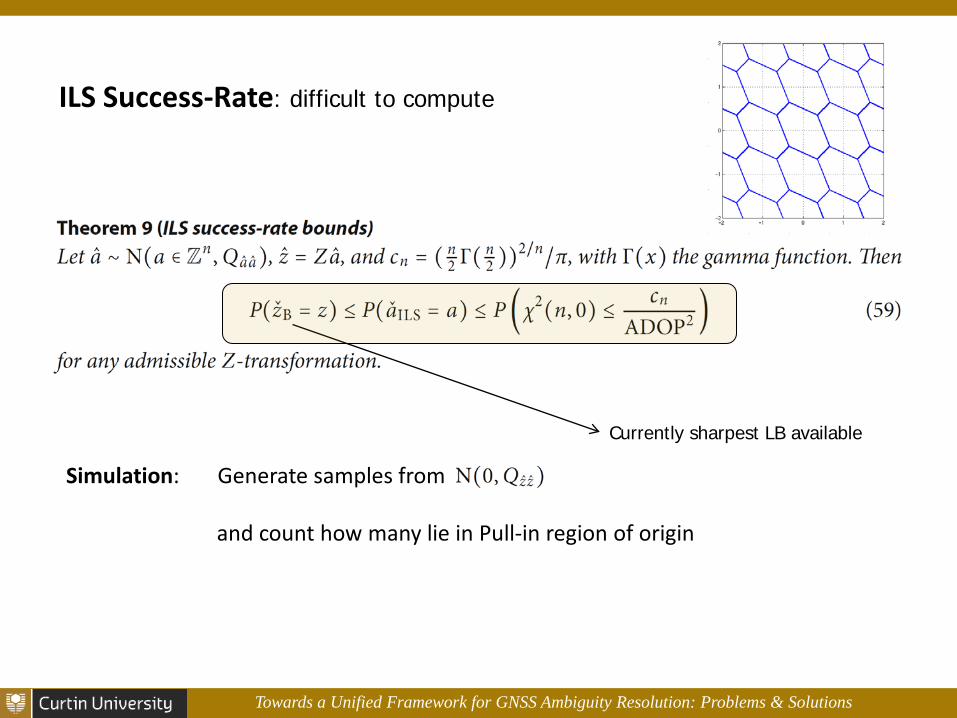
ILS Success-Rate: difficult to compute
Currently sharpest LB available
Simulation: Generate samples from and count how many lie in Pull-in region of origin
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
(No gaps)
(No overlaps)
(Integer remove-restore)
I
IA
IE
Relax the conditions
+z +z
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
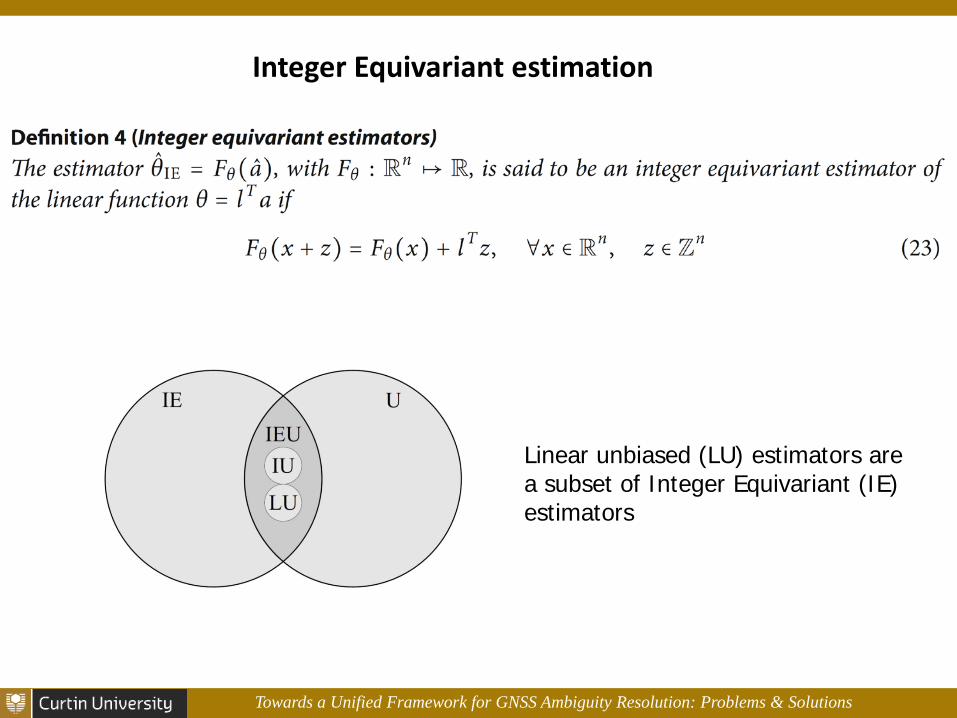
Integer Equivariant estimation
Linear unbiased (LU) estimators are a subset of Integer Equivariant (IE) estimators
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
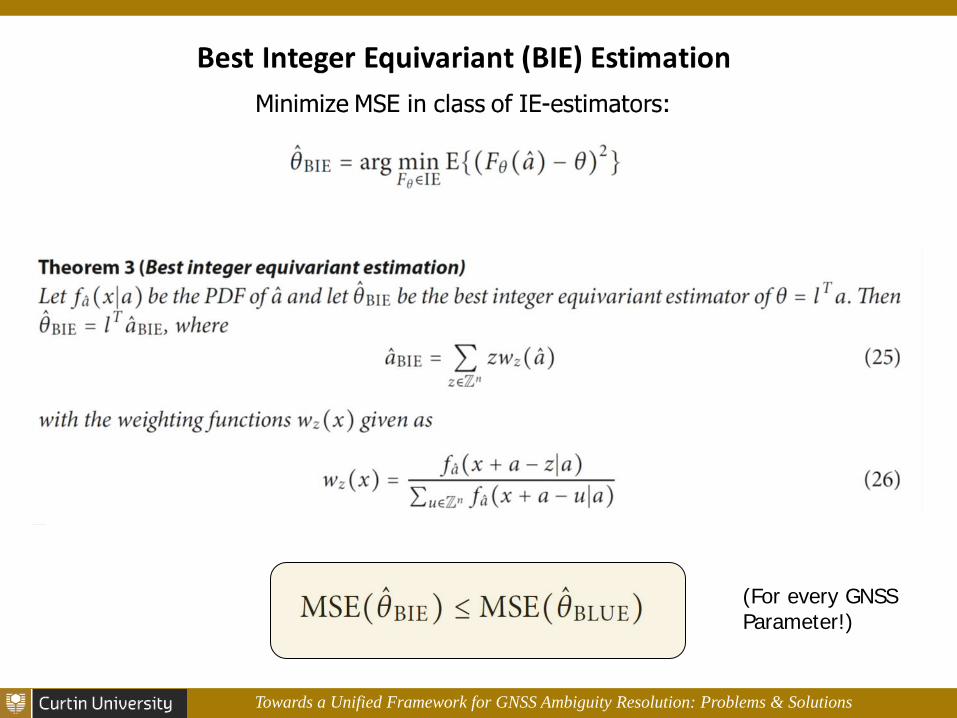
(For every GNSS Parameter!)
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
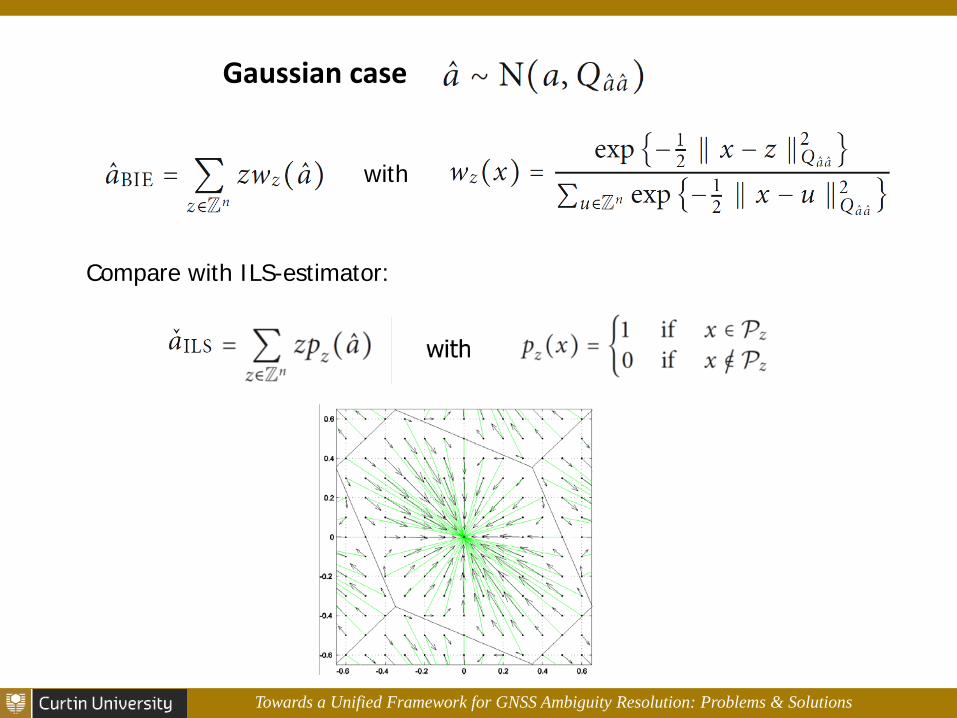
Compare with ILS-estimator:
Gaussian case
with
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
(No gaps)
(No overlaps)
(Integer remove-restore)
I
IA
IE
Relax the conditions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
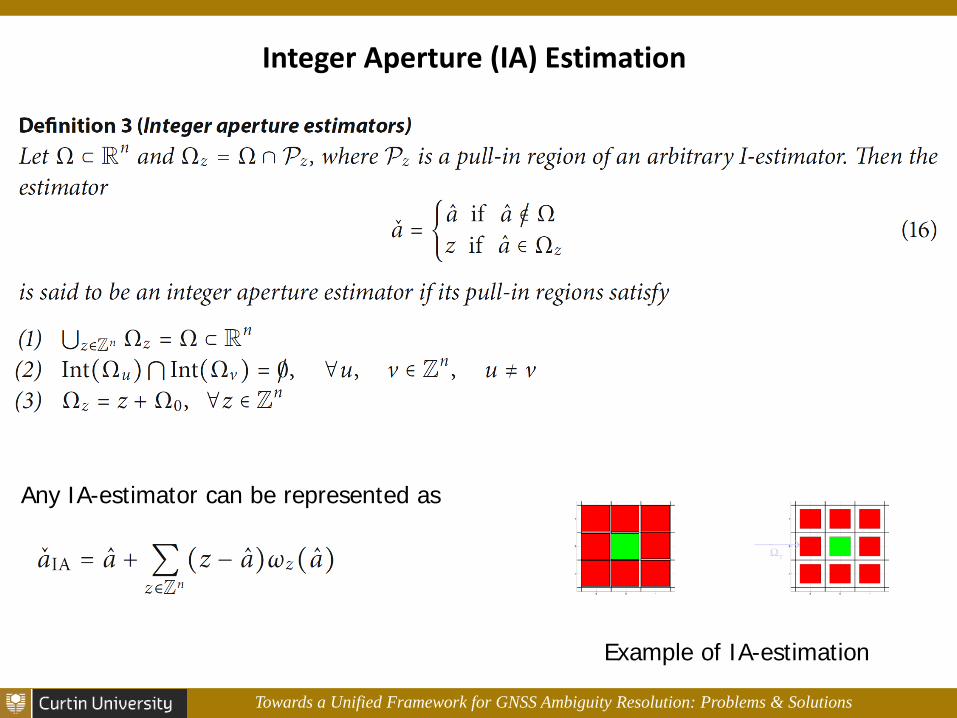
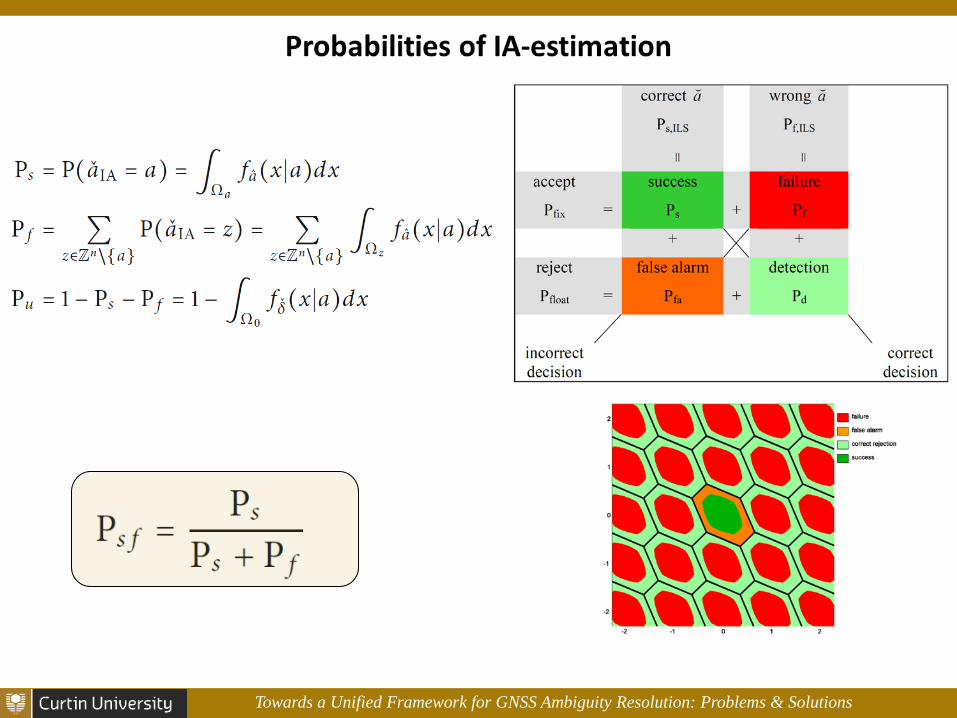
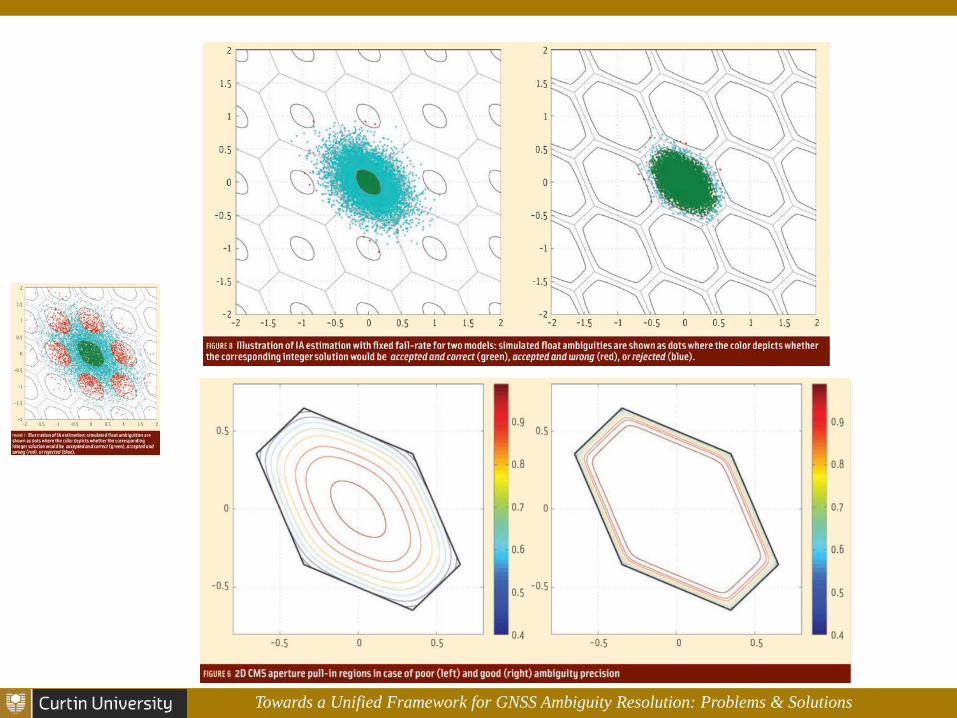
Integer Aperture (IA) Estimation
Any IA-estimator can be represented as
Example of IA-estimation
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
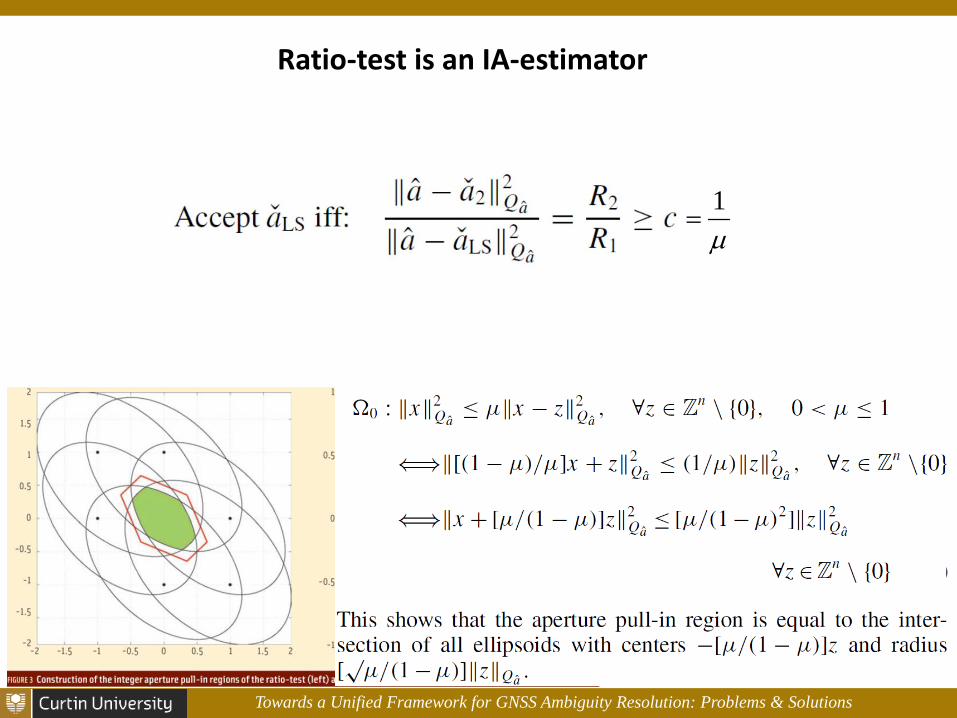
Ratio-test is an IA-estimator
µ1
=

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
Difference-test is an IA-estimator
µ
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions

21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
The Optimal IA-Estimator
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
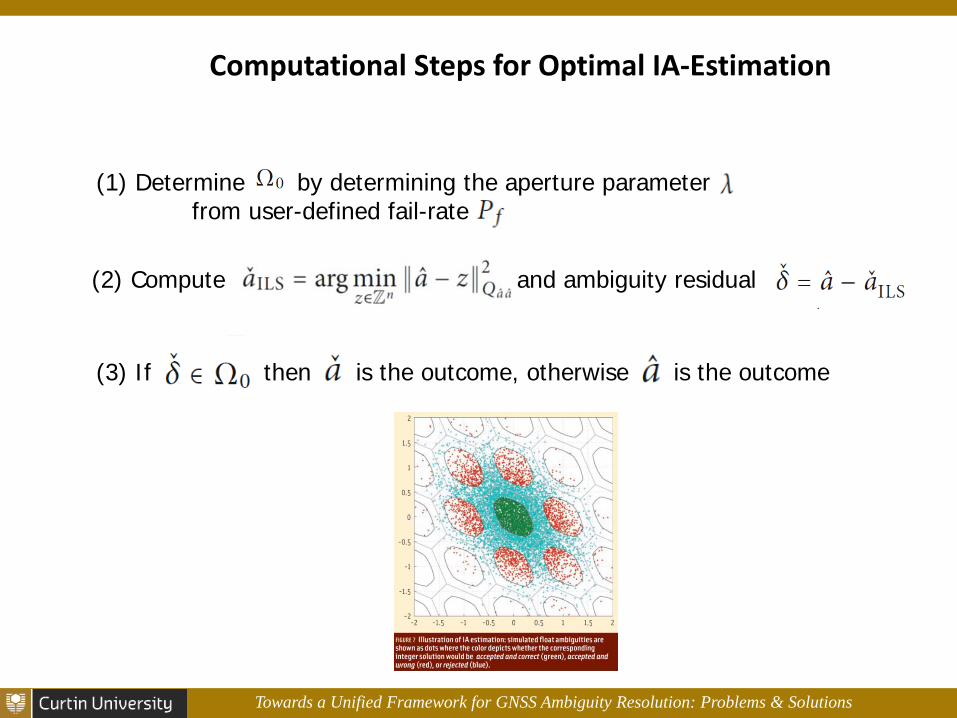
(2) Compute and ambiguity residual
(1) Determine by determining the aperture parameter from user-defined fail-rate
(3) If then is the outcome, otherwise is the outcome
Computational Steps for Optimal IA-Estimation
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
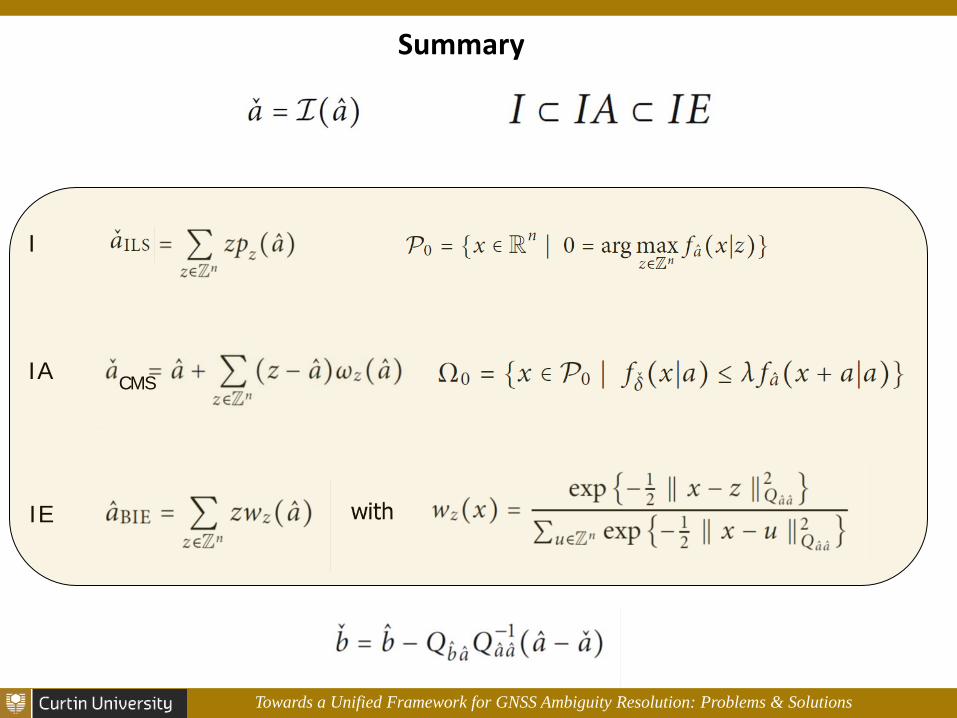
Summary
CMS
I
IA
IE
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
FURTHER READING (THEORY, PROOFS AND APPLICATIONS) THE LAMBDA METHOD Introduced Teunissen PJG (1995): The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity resolution. J. Geod., 70: 65-82. Teunissen PJG (1994): A new method for fast carrier phase ambiguity estimation. Proc. IEEE PLANS '94 (1994), pp. 562-573. Teunissen PJG (1993): Least-squares estimation of the integer GPS ambiguities. Proc. IAG ’93. Also in: LGR Series No. 6, pp. 59-74. Examples of its performance Teunissen PJG, P.J. de Jonge and C.C.J.M. Tiberius (1997): The Least-squares Ambiguity Decorrelation Adjustment: Its performance on short GPS baselines and short observation spans. Journal of Geodesy (1997), 71: 589-602. Teunissen PJG, PJ de Jonge, CCJM Tiberius (1997): Performance of the LAMBDA method for fast GPS ambiguity resolution. Navigation, 44(3), 373-383. Boon F, BAC Ambrosius (1997): Results of real-time application of the LAMBDA method in GPS based aircraft landings. Proceedings KIS97, 339-345. Cox DB, JD Brading (2000): Integration of LAMBDA ambiguity resolution with Kalman filter for relative navigation of spacecraft. Navigation, 47(3), 205-210. Tsai, YF, JC Juang (2007): Ambiguity resolution validation based on LAMBDA and eigendecomposition. Proceedings 63rd AM-ION GPS, 299-304. Dai L, KV Ling, N Nagarajan (2004): Real-time attitude determination for Microsatellite by LAMBDA method combined with Kalman filtering. Proceedings AIAA-ICSS 2004, 3118, 1-8. Monikes R, O Meister, J Wendel, GF Trommer (2006): Yaw-angle estimation of the VTOL-UAVs with the extended LAMBDA method and low cost receivers. Proceedings ION-NTM 2006, 179-186. Van der Kuylen L, P Nemry, F Boon, A Simsky (2006): Comparison of attitude performance for multi-antenna receivers. European J. of Navigation, 4(2), 1-9. Wu F, N Kubo, A Yasuda (2004): Performance evaluation of GPS augmentation using Quasi Zenith Satellite System. IEEE Transactions on Aerospace and Electronic Systems, 40(4), 1249-1260. Hosseini S, Y Balazadegan, MA Rajabi, JA Blais (2006): Evaluation of the effects of the observation weight matrix on the ambiguity resolution in LAMBDA method. Proceedings XXIII FIG, Shaping the Change, TS43, 1-15. Psiaki ML (2006): Batch algorithm for Global-Positioning-System attitude determination and integer ambiguity resolution. Journal of Guidance, Control and Dynamics, 29(5), 1070-1079. Ji S, W Chen, C Zhao, X Ding, Y Chen (2007): Single epoch ambiguity resolution for Galileo with the CAR and LAMBDA methods. GPS Solutions, DOI 10.1007/s10291-007-0057-9
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
AMBIGUITY SUCCESS RATES (proofs, optimality, bounds, ADOP) Teunissen PJG (1997): A canonical theory for short GPS baselines, Part III: The geometry of the ambiguity search space. Journal of Geodesy, 71: 486-501. Teunissen PJG, D Odijk (1997): Ambiguity dilution of precision: Definition, properties and application. Proc. ION-GPS ’97 (1997), pp. 891-899. Teunissen PJG (1998): Succes probability of integer GPS ambiguity rounding and bootstrapping. Journal of Geodesy, 72: 606-612. Teunissen PJG (1999a): The probability distribution of the GPS baseline for a class of integer ambiguity estimators. Journal of Geodesy, Vol. 73(5), pp. 275-284. Teunissen PJG (1999b): An optimal property of the integer least-squares estimator. Journal of Geodesy, 73(11), pp. 587-593. Teunissen PJG, P Joosten, CCJM Tiberius (1999): Geometry-free ambiguity success rates in case of partial fixing. Proc ION GPS-99, pp. 201-207. Teunissen PJG (2000): The success rate and precision of the GPS ambiguities. Journal of Geodesy, 74(3-4), pp. 321-326. Teunissen PJG (2000): ADOP based upperbounds for the bootstrapped and the least-squares ambiguity success. Artificial Satellites, 35(4), pp. 171-179. Teunissen PJG (2005): GNSS ambiguity resolution with optimally controlled failure-rate. Artificial Satellites, 40(4), pp. 219-227 . GENERAL THEORY (overview, generalizations, I-IA-IE-estimators) Teunissen PJG (2000): The GPS integer least-squares statistics. Physics and Chemistry of the Earth, Part A, 25(9-11), 673-677. Teunissen PJG (2001): Integer estimation in the presence of biases. Journal of Geodesy, 75(7-8), 399-407. Teunissen PJG (2002): The parameter distributions of the integer GPS model, Journal of Geodesy (2002), 76(1), pp. 41-48. Teunissen PJG (2003): Theory of integer equivariant estimation with application to GNSS. J. Geod., 77: 403-410. Teunissen PJG (2003): Theory of carrier phase ambiguity resolution. Wuhan Journal of Natural Sciences, 8(2b), 471-484. Teunissen PJG (2003): Towards a unified theory for GPS ambiguity resolution. Journal of Global Positioning Systems, 2(1), 1-12. Teunissen (2004): Penalized GNSS Ambiguity Resolution. Journal of Geodesy, (2004), Vol. 78, No. 4-5, 235 – 244. Verhagen AA, Teunissen PJG (2006): New Global Navigation Satellite System ambiguity resolution method compared to existing approaches. Journal of Guidance, Control and Dynamics, 29(4), 981-991. Teunissen PJG, Verhagen AA (2009): The GNSS Ambiguity Ratio-Test Revisited: A Better Way of Using It. Survey Review, 41, 138-151. Teunissen PJG, Verhagen AA (2011): Integer Aperture Estimation; A Framework for GNSS Ambiguity Acceptance Testing. Inside GNSS, 2011, 66-73.
21-3-2012
Towards a Unified Framework for GNSS Ambiguity Resolution: Problems & Solutions
THE CONSTRAINED LAMBDA METHOD Introduced Teunissen PJG (2006): The LAMBDA Method for the GNSS Compass. Artificial Satellites, Vol.41, N.3 Teunissen PJG (2008): Integer Least Squares Theory for the GNSS Compass. Journal of Geodesy, Springer, submitted, 2008. Teunissen PJG (2008): GNSS Ambiguity Resolution for Attitude Determination: Theory and Method. Proceedings of International GPS/GNSS Symposium, Tokyo Giorgi G, PJG Teunissen (2012): GNSS carrier phase-based attitude determination. Recent Advances in Aircraft Technology, Ed. Ramesh K. Agarwal, InTech, 193-220. Examples of its performance Park C, PJG Teunissen (2003): A New Carrier Phase Ambiguity Estimation for GNSS Attitude Determination Systems. Proceedings of International GPS/GNSS Symposium, Tokyo Park C , PJG Teunissen (2008): A Baseline Constrained LAMBDA Method for the Integer Ambiguity Resolution of GNSS Attitude Determination Systems. Journal of Control, Robotics and Systems (Korean) Vol.14(6), 587-594 Buist P (2007): The Baseline Constrained LAMBDA Method for Single-Epoch, Single-Frequency Attitude Determination Applications. Proceedings of ION GPS 2007 Giorgi G, PJG Teunissen, P Buist (2008): A Search and Shrink Approach for the Baseline Constrained LAMBDA Method: Experimental results. Proceedings of International GPS/GNSS Symposium, Tokyo, 2008 Verhagen AA (2006): Visualization of GNSS-related design parameters: manual for the Matlab user interface VISUAL Giorgi G, PJ Buist, S Verhagen, PJG Teunissen (2011): GNSS-based attitude determination: aerospace and formation flying, Inside GNSS, July/August, 2011, 62-71








![Determining GNSS Phase Biases [1.05ex]by Common Clock ... - Kersten.pdfI Carrier Phase Biases, improved ambiguity resolution (integer PPP), [Laurichesse et al., 2009] I Key Parameter](https://img.pdfslide.us/doc/110x75/5f07a2b47e708231d41df8aa/determining-gnss-phase-biases-105exby-common-clock-i-carrier-phase-biases.jpg)