Embed Size (px)
Citation preview

Towards a Real-Time Data Driven Wildland Fire Model
Jan Mandel, Jonathan D. Beezley, Soham Chakraborty, Janice L. Coen, Craig C. Douglas, Anthony Vodacek and Zhen Wang
University of ColoradoNational Center for Atmospheric ResearchUniversity of KentuckyRochester Institute of Technology
Supported by the NSF under grants CNS-0325314, 0324989, 0324988, 0324876, 0324910, 0719641, 0719626, and 0720454

Goals
The modelfaster than real timeCoupled weather-firecalibrated from measurements
Data assimilation: incorporate real data while the model is running
sparse data (weather stations)large image datasets (aerial photographs)data acquisition steeringdata arriving delayed and out of ordercapable of adjusting a highly nonlinear model
Real-time visualization over the internet in the field

Wildfire DDDAS Structure
Synthetic data
Map sources (GIS)
Fuel DataSensors, telemetry
Forecast
Weather
Fire
Model Observation function
Aerial imaging
Adjust Compare
Data Assimilation
Initial conditions
Weather data
Data Acquisition
Real data pool
Real time data
Interpret

The coupled weather-fire model

FIRE
Wind
ATMOSPHERE: WRF MODEL
Heat, water vapor
2D fire propagation
Coupled weather - fire spread model
WRF-SFIRE
Weather: atmospheric dynamics and parametrized
physics (clouds, rain,…)

Burning area: f(x,y)<0, fireline f(x,y)=0Spread rate R in normal direction from fuel, slopeLevel set function evolves by the PDESolved numerically by RK of order 2 (Euler too biased), f must always decrease (stabilizing effect)Coupled with the Weather Research and Forecasting Model (WRF)Suitable for data assimilation
SFIRE: Spread fire model by a level set method
0f R ft
∂+ ∇ =
∂

Level set function representation of the burning area

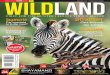
Coupled WRF-SFIRE simulationThe fire propagates from two line ignitions and one circle ignition, in the process of merging. The arrows are the horizontal wind at the ground level. The false color is the fire heat flux.The fire front on the right has an irregular shape and is slowed down because of air being pulled up by the heat created by the fire. This kind of fire behavior cannot be modeled by empirical spread models alone and requires the two-way interaction with the atmosphere.

SFIRE software structure and atmosphere-fire coupling
Model itself independent of WRFCoupled by single driver module as a surface physics processSFIRE input: wind velocities u,v, fuel data, ignition locations and timeInterpolate winds to fire grid, advance fire one time step, compute fuel burned assuming exponential decay from ignitionSubmesh granularity: fireline is a straight line crossing fire cells, computation of fuel burned by approximate integration, can be done exactly tooSFIRE output: add up heat flux from fuel burned over atmosphericcells, translate into temperature and moisture tendencies (with assumed exponential decay over several layers, WRF cannot take flux boundary conditions)

WRF-SFIRE status and immediate goalsNow works with OpenMP parallelization and made-up dataIn progress now: read real data in ad-hoc fashionSummer 08: DM parallel (our version of WRF with fire mesh refinement won’t run with DM now), read data in WRF-approved mannerSummer 08: add crown fire (its own level set function)Fall 08: ready for release, merge with the current WRF versionEnd 08: code freezeSpring 09: release as part of WRF download

Data Assimilation

Data assimilation a.k.a. statistical estimationModel state, including
uncertainty Synthetic data
Observation
function
Data
Model state with the data assimilated
Bayes thm Advance timeAdvance time
Balances the uncertainty in the model and in the dataUse of new data reduces the uncertainty in the model stateGaussian probability distributions → Kalman filterUncertainty represented by an ensemble
ensemble Kalman filters (still Gaussian)particle filters (need huge ensembles)

Parallel software structure
Real data pool
CPU1
CPUn
Fire -
atmosphere model
Observa-
tion
functionSt
ate…
Stat
e
Synt
hetic
da
ta
Fire -
atmosphere model
Observa-
tion
functionSt
ate…
Stat
e
Synt
hetic
da
ta
CPUk
CPUm
Fire -
atmosphere model
Observa-
tion
functionSt
ate…
Stat
e
Synt
hetic
da
ta
Fire -
atmosphere model
Observa-
tion
functionSt
ate…
Stat
e
Synt
hetic
da
ta
…
Ensemble member 1
Ensemble member N
Morphing ensemble Kalman
filter
Parallel linear algebra
Advancing the ensemble in time Data assimilation

But Ensemble Kalman
Filter fails for fire models
Probability distributions are strongly non-gaussian(burning/not burning)Discrepancies are in the fire position as well as in the intensityUnlike features in other problems (atmosphere, ocean,…) fire in the wrong location will not conveniently dissipate, but grows instead, and soon the whole domain is burning

Dealing with position errors: Morphing Ensemble Filters

Image registration and morphing
(Picture Gao and Sederberg, 1998)
0 1
interpolate between two maps: ( ) ( )given and , how to find ?solve minimization problem for registration distance
( , ) min ( )
automatically, by multilevel optimizationT
f x f x Txf f g f T
d f g f I T g T T
λ λ= += =
= + − + +
The transformation is found automatically without any human input.

Automatic morphing combines fire positions and intensities in one shot

Morphing Ensemble Filter
Represent the ensemble members ui as morphs of one fixed state plus a residual:
Apply data assimilation to the extended state mapping Ti, + residuals ri instead of the states ui
After the members are advanced in time, use the previous morph mappings as a good initial guess.Now the ensemble Kalman filter can move the fireline easily!
( ) ( )i i iu u r I T= + +

Data Assimilation by Morphing EnKF
X (m)
Y (
m)
0 100 200 300 400 5000
100
200
300
400
500
X (m)
Y (
m)
0 100 200 300 400 5000
100
200
300
400
500
X (m)
Y (
m)
0 100 200 300 400 5000
100
200
300
400
500
Forecast fire position (model output)
Data Analysis fire position (data accounted for, continue running the model)Instead of having linear combinations of the
states create a number of smaller fires, linear combinations of the transformed states move a single fire around.

Data assimilation in coupled atmosphere/fire model WRF/SFIRE
Simulated data Standard EnKF Morphing EnKF

Observation function

Observation function and data sourcesCreate synthetic data from the model state to be matched against the real dataSynthetic weather station data: reports location, timestamp, wind velocity, temperature, and humidity. Must determine which cell in grid, where, and if fire is present in cell or a neighboring cell.Synthetic infrared aerial images in several frequencies bands. Needs ray tracing and computation of the flame height and direction
Determine sensor location
Fire in multiple cells

Data Acquisition

Primarily for local weather… but some burnovers
0
100
200
300
400
500
600
700
800
11250 11750 12250 12750 13250
seconds after ignition
tem
pera
ture
, C
Kremens, et al. 2003. Int. J. Wildland Fire
Data logger and thermocouples
Time (sec. after ignition)
T (oC)
Reconfigure to rapidly deployGPS -
Position AwareVersatile Data InputsVoice or Data Radio telemetryInexpensive
Autonomous Environmental Detectors

Autonomous Environmental Sensorss
positioned so as to provide weather conditions near a fire, aremounted at various heights above the ground on a pole with a ground spikewill survive burnovers by low intensity firesthe temperature and radiation measurements provide a direct indication of the firefront passage and the radiation measurement can also be used to determine the intensity of the firethe sensors transmit data and can be reprogrammed by radio

Wildfire Airborne Sensor Program (WASP)
High Performance Position Measurement SystemColor or Color Infrared
Camera• 4k x 4k pixel format• 12 bit quantization• High quality Kodak CCD
Fire Detection Cameras• 640 x 512 pixel format• 14 bit quantization• < 0.05K NEDT
•Position 5 m•Roll/Pitch 0.03 deg•Heading 0.10 deg
D. McKeownB. KremensM. Richardson

Next: Put it All Together and Test on a Real Fire
The morphing EnKF method works reliably now –integrate it into our production quality data assimilation frameworkIntegrate the data assimilation code with the real wildfire-atmosphere codeConnect the input with real-time data acquisition, under development separatelyIntegrate the output with Google Earth visualization Test on reanalysis of the Esperanza 2006 fire

Data assimilation status and software goals
Morphing EnKF now works, a research codeNow data = whole array in stateNeed to speed up the automatic registrationSummer 08: image data, one observation function as a templateFall 08: station data (will require different algorithms… more math)Spring 09: a presentable code

Conclusion
Dynamic Data Driven Application System for wildfire modeling and prediction in progressHighly nonlinear system poses unique challenges in data assimilation and motivates new developments in data assimilation methodologyPractical needs drive new mathematical methodsCollaborative software developmentEmphasis on software validation and reliabilityCoupled atmosphere-fire model handles realistic firesMany components done, still need to put them togetherData assimilation works well on model fire problems