Embed Size (px)
Citation preview

Wouter Bac MSc 27 September 2012
Wageningen UR Greenhouse Horticulture
Toward commercialization of robotic
systems for high-value crops: state-of-the-
art review and challenges ahead

Overview
Introduction
Plant Maintenance Operations (PMOs)
Literature review about harvesting robots
7 factors limiting commercialization
7 future challenges
2

Why this review
Despite 30 years of research no commercial robots for PMOs in high-value crops why?
Quantified performance unknown about state-of-the art
Future challenges to commercialize robotic systems for high-value crops
3

Literature review demarcation
Only high-value crops high labour costs (29 % NL)
Only multiple-harvest crops (tomatoes but not lettuce)
Only Plant Maintenance Operations (PMOs)
Time period 1981-2011
4

Operations in high value crops: PMOs candidate 1. Seeding, grafting and cutting
2. Transplanting
3. Transport of plants to a greenhouse
4. Planting
5. Plant Maintenance Operations – PMOs
1. Attaching plants to a supporting wire or stick
2. Sticking support sticks or knotting wires
3. Side shoot removal
4. Fruit/flower thinning
5. Leaf picking
6. Lowering plants
7. Crop protection/spraying
8. Harvesting (single/multiple)
6. Internal transport of plants or harvested products
7. Grading
8. Packing
9. Crop removal and cleaning
5

Review Methodology
6

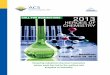
Only harvesting robots were reviewed, examples:
7
Cucumber (Van Henten et al., 2003)
Melons (Edan, 1994)
Strawberry (Hayashi et al., 2010)
Egg-plant (Hayashi et al., 2001)
Cherry
(Tanigaki et al., 2008)

Methodology
Performance indicators
Autonomous: true/false
Tested in field or lab
Fruit localization success [%]
Fruit detachment success [%]
Cycle time [s]
Damage rate [%]
Number of fruits evaluated [#]
Detachment attempt ratio [total attempts/succesful attempts]
8

Methodology (2)
Design process techniques
Use of systematic design or systems engineering methods: true/false
Use of an economic analysis
Hardware design decision
Manipulator DOFs used
Off-the-shelve or custom-made hardware components
9

Methodology (3)
Algorithms partially or fully reported for:
Fruit localization
Ripeness determination
Obstacle localization
Task planning
Motion planning
Whether any of these algorithms were adaptive: true/false
10

Results
11

In total, 48 projects have been performed
12

Performance indicators
Cycle time was 35 ± 57 s (N=26) 13

Performance indicators (2)
73 % were autonomous
12.5 % reported the attempts made: avg 1.7 att per fruit
67 % were tested in the field
14

Systematic Design/ Economic analysis
12.5 % used a systematic design method
12.5 % performed an economic analysis
15

Manipulators mostly 3 DOF
16

7 factors limiting commercialization of
robotics systems
17

Factors 1-3 (quantified proof)
1. Cycle time too long (35 ± 53 s)
2. Fruit localization, detachment, and harvest (65.7 %) did not reach 100 %.
What about the other 35 % of the ripe fruits?
Lack of learning capabilities
3. Projects poorly reported
57 % of the performance indicators was based on a known number of test samples
Number of samples evaluated varied: 11 to 2506
Units missing in 24 % of the reported perf. indicators
18

Factors 1-3 (quantified proof)
3. Projects poorly reported
Damages to the plant never reported, exception (Pool & Harrell, 1991)
False-positive detections hardly reported
Requirements hardly described
Functionality of the robot hardly described
Algorithms hardly described (5-63 %)
Algorithms partly described in 49 % of the cases
Failed projects never reported
19

Factors 4-7 (indications only)
4. Robot designs probably suboptimal
Mostly travelling device, manipulator and
end-effector
Manipulator DOF
Alternative designs hardly explored
Economics hardly considered
5. Scattered market
6. PMOs differ among crops & limited machine utilization
7. Added value hardly explored
20

Future Challenges
21

Challenges 1-2 1. Modifying the environment
Different cultivation systems, e.g. cucumber
Supportive mechanisms, e.g. blowers, pushing mechanisms, canopy compression
Alternative cultivation methods, e.g. flower pruning to avoid fruit clusters
Cultivar selection and cross-breeding
2. Enhancing the robotic system
Learning capabilities, e.g. adaptive classifiers, on-line learning algorithms
Human-robot collaboration
Dedicated hardware, e.g. compliant end-effectors, optimized manipulators 22

Challenges 3-4 3. Using systematic design
Involve stakeholders: growers, engineers, academia
Define requirements for several aspects
QFD by Toyota; Cradle-to-cradle; etc.
Systems engineering (Edan & Miles, 1994)
4. Performing economic analyses System costs
Payback time
Damages
Maintenance costs
R&D costs
Example:
sweet-pepper harvester for 180 k€ @ 6s/fruit 23

Challenges 5-7
5. Adding value to the robotic system Tracking and Tracing
Ripeness prediction
Disease detection by chlorophyll fluorescence
Sorting and quality assesment directly after harvest
Phenotyping tasks
6. Multi-operational or multi-crop systems Apple and peach (Sites and Delwiche, 1988)
Cucumber leaf picking and harvesting (Van Henten et al. 2002, 2006)
Grape harvesting, spraying, bagging and thinning (Monta, 1995)
However, trade-off between cost and machine flexibility (Gupta & Goyal, 1989)
7. Improve knowledge transfer 24

Conclusion
Operations summarized
Only 2 projects for PMOs other than harvesting and spraying
48 harvesting robot projects identified
7 Limiting factors identified
7 Future challenges established
25

Thank you for your attention
26