Embed Size (px)
Citation preview
universita degli studi di roma“tor vergata”
Facolta di Ingegneria
Corso di Laurea Specialistica in Ingegneria Medica
Applicazione del principio di minima azione
di Gauss all’analisi biomeccanica
di sistemi multibody
Relatore: Candidata:
Prof. Ettore Pennestrı Martina Trebbi
Correlatori:
Dott. Francesco Nappi
Dott. Diego Rughi
Anno Accademico 2008/2009

A Nash

Abstract
The biomechanical evaluation of working activities is currently based on the indications
given by the standard ISO 11228. These indications require objective and subjective
estimations. The aim of the present work was to contribute in making this biomechanical
evaluation more objective.
In order to reach this goal it was created a 2D biomechanical model for the characte-
rization of dynamic and kinematic aspects of the human body, regarded as a multibody
system. The model, implemented in Matlab programming language, reconstructs the cen-
ters of mass trajectories, as well as their velocities and accelerations. Constraint forces
and driving torques at the joints are computed as well.
The model receives as input centers of mass initial positions, forces applied to bodies,
antropometric data, such as segment’s masses and moments of inertia, and the rehonomic
constraints. The latter are the only information required for each time instant conside-
red. Kinematic data (rehonomic constraints data) are experimentally obtained from an
optoelettronic system, while antropometric data are obtained from literature. The equa-
tions of motion for the constrained system are solved, by means of the Udwadia-Kalaba
formulation. Then, using a numerical integration routine, velocities and positions are
computed.
The model has been validated comparing its kinematic outputs with those of the opto-
elettronic system, while for the dynamic outputs the comparison has been made with that
of a muscular model developed in another thesis. In both cases a satisfactory agreement
with experimental data was obtained.
The model has been tested for monitoring a simple case of manual material handling,
one of the main causes of working related injures. In particular, the results have been
compared to the standard ISO 11228-1, based on NIOSH lifting equation. The results
obtained are fully consistent with those from lifting equation. As a general pattern it was
observed that a lifting activity can be considered safe when the subject, adopting small
and unconscious postural adaptations, is able to avoid drastic increases in joint torques.
Indice
1 Il fascino del moto 1
1.1 Modelli matematici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Studio biomeccanico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3 Motivazioni e metodi del presente lavoro di tesi . . . . . . . . . . . . . . . 10
1.4 Overview della tesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Dinamica analitica 13
2.1 Sistema di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Postulati fondamentali della dinamica . . . . . . . . . . . . . . . . . . . . . 14
2.3 Relazione simbolica della dinamica continua . . . . . . . . . . . . . . . . . 15
2.4 Equazione simbolica della dinamica continua . . . . . . . . . . . . . . . . . 17
2.4.1 Relazione ed equazione simbolica della Statica . . . . . . . . . . . . 18
2.5 Principio di d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6 Equazioni di Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.7 Principio variazionale di Hamilton . . . . . . . . . . . . . . . . . . . . . . . 25
2.8 Principio di d’Alembert-Lagrange generalizzato . . . . . . . . . . . . . . . 27
2.9 Equazioni di Gibbs-Appell . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.10 Minimizzazione di una funzione soggetta a vincoli . . . . . . . . . . . . . . 32
i

INDICE
2.11 Equazioni di Lagrange per sistemi di corpi . . . . . . . . . . . . . . . . . . 32
2.12 Sistema di equazioni algebrico-differenziali . . . . . . . . . . . . . . . . . . 34
3 Formulazione dinamica
con il principio di Gauss 37
3.1 Spazio di configurazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2 Vincoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2.1 Vincoli olonomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2.2 Vincoli non olonomi . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3 Principio di Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4 Operativita del principio di Gauss . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 La reazione dei vincoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.6 Un ulteriore esame dell’equazione fondamentale . . . . . . . . . . . . . . . 52
3.7 Equazione fondamentale e meccanica Lagrangiana . . . . . . . . . . . . . . 53
3.8 La formulazione di Udwadia-Kalaba . . . . . . . . . . . . . . . . . . . . . . 57
3.9 Formulazione stabilizzata di Baumgarte . . . . . . . . . . . . . . . . . . . . 59
4 Analisi della struttura cinematica 61
4.1 Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Coppia rotoidale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.3 Coppia prismatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4 Vincoli reonomi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5 Analisi del movimento 72
5.1 Basi di ricostruzione 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 Calibrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.3 Markers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.1 Markers attivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
ii
INDICE
5.3.2 Markers passivi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.4 Videocamere . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.5 Sincronizzazione dei sensori e marker detection . . . . . . . . . . . . . . . . 84
5.6 Elaborazione da parte del computer . . . . . . . . . . . . . . . . . . . . . . 85
5.7 Sistema BTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.7.1 Componenti del sistema . . . . . . . . . . . . . . . . . . . . . . . . 88
5.7.2 Calibrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6 Modello 95
6.1 Main . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.2 Scrittura delle equazioni vincolari . . . . . . . . . . . . . . . . . . . . . . . 103
6.2.1 Constraint . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.2.2 Driving . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.2.3 Driving derivatives . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.2.4 Interpolazione spline . . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.3 Generazione degli elementi costitutivi delle equazioni del moto . . . . . . . 106
6.3.1 Jacobian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.3.2 Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6.3.3 Forza & Timeforcevar . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.3.4 Fgamma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.3.5 Lambda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.4 Risoluzione delle equazioni del moto . . . . . . . . . . . . . . . . . . . . . . 108
6.4.1 Accel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.4.2 Dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.5 Funzioni accessorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.6 Output grafici del modello . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
iii

INDICE
7 Analisi sperimentale e risultati 111
7.1 Flesso-estensione della spalla . . . . . . . . . . . . . . . . . . . . . . . . . . 112
7.1.1 Setup sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
7.1.2 Modellazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
7.1.3 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
7.1.3.1 Doppia flesso-estensione della spalla . . . . . . . . . . . . 117
7.1.3.2 Estensione della spalla . . . . . . . . . . . . . . . . . . . . 122
7.2 Flesso-estensione del ginocchio . . . . . . . . . . . . . . . . . . . . . . . . . 127
7.2.1 Setup sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
7.2.2 Modellazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
7.2.3 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
7.2.3.1 Doppia flesso-estensione del ginocchio . . . . . . . . . . . 133
7.2.3.2 Flesso-estensione del ginocchio . . . . . . . . . . . . . . . 138
7.3 Flesso-estensione del gomito . . . . . . . . . . . . . . . . . . . . . . . . . . 142
7.3.1 Setup sperimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
7.3.2 Modellazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
7.3.3 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
7.3.3.1 Doppia flesso-estensione del gomito . . . . . . . . . . . . . 147
7.3.3.2 Flesso-estensione del gomito . . . . . . . . . . . . . . . . . 150
8 Movimentazione manuale dei carichi 154
8.1 Metodo NIOSH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
8.2 Limiti di applicabilita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
8.3 Modellazione del caso sperimentale . . . . . . . . . . . . . . . . . . . . . . 160
8.4 Analisi biomeccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Conclusioni 171
iv

INDICE
A Inversa generalizzata di una matrice 174
A.1 MP-inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
A.2 G-inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
A.3 L-inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
A.4 Esistenza ed unicita della MP-inversa . . . . . . . . . . . . . . . . . . . . . 176
A.5 Calcolo numerico della MP-inversa . . . . . . . . . . . . . . . . . . . . . . 178
A.5.1 Calcolo matrice pseudoinversa mediante fattorizzazione di Gram-
Schmidt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
A.5.2 Calcolo matrice pseudoinversa mediante decomposizione SVD . . . 180
A.5.3 Calcolo matrice pseudoinversa mediante algoritmo di Greville . . . 181
Bibliografia 183
v
Elenco delle figure
1.1 Scamnum Hippocraticum . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Giovanni Alfonso Borelli, padre della biomeccanica . . . . . . . . . . . . . 3
4.1 Nomenclatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.2 Coppia rotoidale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.3 Coppia prismatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.1 Le derby d’Epsom, Theodore Gericault, 1821 . . . . . . . . . . . . . . . . . 72
5.2 Il cavallo in movimento, 1878 . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.3 Illustrazione 2D dell’approccio fotogrammetrico . . . . . . . . . . . . . . . 75
5.4 Un sistema a tre telecamere . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.5 Architettura sistema optoelettronico . . . . . . . . . . . . . . . . . . . . . 88
5.6 Markers passivi BTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.7 Telecamere BTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.8 Smart-Analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.9 Terna s.d.r. assoluto per sistema optoelettronico . . . . . . . . . . . . . . . 92
5.10 Processo di calibrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.11 Risultato della calibrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
vi

ELENCO DELLE FIGURE
6.1 Posizione del corpo i-esimo . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.2 Struttura del programma . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.1 Posizione markers per flesso-estensione spalla . . . . . . . . . . . . . . . . . 113
7.2 Schema protocollo flesso-estensione spalla . . . . . . . . . . . . . . . . . . . 116
7.3 Andamenti cinematici tra schiena e braccio . . . . . . . . . . . . . . . . . . 118
7.4 Andamenti cinematici tra braccio e avambraccio . . . . . . . . . . . . . . . 118
7.5 Confronto coordinate braccio . . . . . . . . . . . . . . . . . . . . . . . . . . 119
7.6 Confronto coordinate avambraccio . . . . . . . . . . . . . . . . . . . . . . . 119
7.7 Confronto velocita & accelerazioni schiena-braccio . . . . . . . . . . . . . . 120
7.8 Confronto velocita & accelerazioni braccio-avambraccio . . . . . . . . . . . 120
7.9 Dinamica per l’articolazione della spalla . . . . . . . . . . . . . . . . . . . 121
7.10 Dinamica per l’articolazione del gomito . . . . . . . . . . . . . . . . . . . . 122
7.11 Andamenti cinematici tra schiena e braccio . . . . . . . . . . . . . . . . . . 123
7.12 Andamenti cinematici tra braccio e avambraccio . . . . . . . . . . . . . . . 123
7.13 Confronto coordinate braccio . . . . . . . . . . . . . . . . . . . . . . . . . . 124
7.14 Confronto coordinate avambraccio . . . . . . . . . . . . . . . . . . . . . . . 124
7.15 Confronto velocita & accelerazioni schiena-braccio . . . . . . . . . . . . . . 125
7.16 Confronto velocita & accelerazioni braccio-avambraccio . . . . . . . . . . . 125
7.17 Dinamica per l’articolazione della spalla . . . . . . . . . . . . . . . . . . . 126
7.18 Dinamica per l’articolazione del gomito . . . . . . . . . . . . . . . . . . . . 126
7.19 Posizione markers per flesso-estensione ginocchio . . . . . . . . . . . . . . . 128
7.20 Schema protocollo flesso-estensione ginocchio . . . . . . . . . . . . . . . . . 131
7.21 Andamenti cinematici tra schiena e coscia . . . . . . . . . . . . . . . . . . 133
7.22 Andamenti cinematici tra coscia e gamba . . . . . . . . . . . . . . . . . . . 134
7.23 Confronto coordinate coscia . . . . . . . . . . . . . . . . . . . . . . . . . . 135
7.24 Confronto coordinate gamba . . . . . . . . . . . . . . . . . . . . . . . . . . 135
vii
ELENCO DELLE FIGURE
7.25 Confronto velocita & accelerazioni schiena-coscia . . . . . . . . . . . . . . . 136
7.26 Confronto velocita & accelerazioni coscia-gamba . . . . . . . . . . . . . . . 136
7.27 Dinamica per l’articolazione dell’anca . . . . . . . . . . . . . . . . . . . . . 137
7.28 Dinamica per l’articolazione del ginocchio . . . . . . . . . . . . . . . . . . 137
7.29 Andamenti cinematici tra schiena e coscia . . . . . . . . . . . . . . . . . . 138
7.30 Andamenti cinematici tra coscia e gamba . . . . . . . . . . . . . . . . . . . 138
7.31 Confronto coordinate coscia . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7.32 Confronto coordinate gamba . . . . . . . . . . . . . . . . . . . . . . . . . . 139
7.33 Confronto velocita & accelerazioni schiena-coscia . . . . . . . . . . . . . . . 140
7.34 Confronto velocita & accelerazioni coscia-gamba . . . . . . . . . . . . . . . 140
7.35 Dinamica per l’articolazione dell’anca . . . . . . . . . . . . . . . . . . . . . 141
7.36 Dinamica per l’articolazione del ginocchio . . . . . . . . . . . . . . . . . . 141
7.37 Posizione markers per flesso-estensione gomito . . . . . . . . . . . . . . . . 142
7.38 Schema protocollo flesso-estensione gomito . . . . . . . . . . . . . . . . . . 146
7.39 Andamenti cinematici tra schiena e braccio . . . . . . . . . . . . . . . . . . 147
7.40 Andamenti cinematici tra braccio e avambraccio . . . . . . . . . . . . . . . 148
7.41 Confronto coordinate braccio . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.42 Confronto coordinate avambraccio . . . . . . . . . . . . . . . . . . . . . . . 149
7.43 Dinamica per l’articolazione della spalla . . . . . . . . . . . . . . . . . . . 150
7.44 Dinamica per l’articolazione del gomito . . . . . . . . . . . . . . . . . . . . 150
7.45 Andamenti cinematici tra schiena e braccio . . . . . . . . . . . . . . . . . . 151
7.46 Andamenti cinematici tra braccio e avambraccio . . . . . . . . . . . . . . . 151
7.47 Confronto coordinate braccio . . . . . . . . . . . . . . . . . . . . . . . . . . 152
7.48 Confronto coordinate avambraccio . . . . . . . . . . . . . . . . . . . . . . . 152
7.49 Dinamica per l’articolazione della spalla . . . . . . . . . . . . . . . . . . . 153
7.50 Dinamica per l’articolazione del gomito . . . . . . . . . . . . . . . . . . . . 153
viii

ELENCO DELLE FIGURE
8.1 Fattori demoltiplicativi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
8.2 Classi di rischio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
8.3 Posizione markers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
8.4 Cinematica tra schiena e braccio . . . . . . . . . . . . . . . . . . . . . . . . 164
8.5 Confronto coppie alla schiena . . . . . . . . . . . . . . . . . . . . . . . . . 165
8.6 Angolo schiena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
8.7 Confronto coppie alla spalla . . . . . . . . . . . . . . . . . . . . . . . . . . 166
8.8 Confronto coppie all’articolazione del gomito . . . . . . . . . . . . . . . . . 167
8.9 Confronto potenze nella schiena . . . . . . . . . . . . . . . . . . . . . . . . 168
8.10 Confronto potenze nella spalla . . . . . . . . . . . . . . . . . . . . . . . . . 168
8.11 Confronto parziale coppie . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
8.12 Confronto parziale potenze . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
ix
Capitolo 1Il fascino del moto
La meccanica e una branca della fisica che studia il movimento e la deformazione di corpi
solidi inanimati sui quali agiscono disturbi meccanici chiamati forze. Verso la fine del XVII
secolo si inizio ad applicare la teoria meccanica anche ai sistemi biologici considerati come
strutture fisiologiche sottoposte, anch’esse, a sollecitazioni statiche e dinamiche. Lo studio
della meccanica dei sistemi biologici, in particolar modo del corpo umano, prese quindi il
nome di biomeccanica .
La biomeccanica ha come oggetto lo studio del movimento del corpo umano; in parti-
colar modo studia ed analizza:
� la distribuzione delle sollecitazioni ossee;
� le azioni a livello articolare;
� l’intervento muscolare durante il movimento e il mantenimento posturale.
Il primo connubio tra meccanica e anatomia si puo far risalire all’antica Grecia grazie al
contributo di Aristotele (384-322 a.C.) il quale, nel “De Motu Animalium”, non si limito ad
osservare il movimento dell’animale, ma prese in considerazione anche questioni specifiche,
come ad esempio la differenza fisiologica tra immaginare un’azione ed eseguirla. Si puo
quindi riguardare Aristotele come un antesignano biomeccanico.
1
Cap.1 Il fascino del moto
Ippocrate (460-377 a.C.), uno dei padri della medicina, intorno al 400 a.C. sfrutto la
forza di gravita per alleviare la pressione sui dischi intervertebrali e per ridurre l’insorgenza
e gli effetti del mal di schiena. Per fare cio utilizzo una sorta di scala a cui veniva legato
il sofferente. Ideo inoltre un letto per la trazione vertebrale che chiamo Scamnum.
Figura 1.1: Scamnum Hippocraticum
Le prime ricerche in merito a come si muove il corpo umano furono pero condotte
solamente due millenni dopo ad opera di Leonardo da Vinci (1452-1519), seguito poi da
Galileo Galilei (1564-1643) e Isaac Newton (1642-1727), i quali gettarono le basi per la
comprensione teorica della fisica e delle scienze naturali. Un allievo di Galileo, Giovanni
Alfonso Borelli (1608-1679) sulla scorta delle sue conoscenze di medicina, matematica e
fisica, inizio un percorso di studi sul movimento del corpo umano: mostro che i muscoli e
le ossa formano un sistema di leve, e che durante alcuni movimenti ci sono articolazioni
che trasmettono forze molto maggiori del peso corporeo. Determino la posizione del centro
di gravita corporeo, e dimostro che la respirazione e un processo guidato dai muscoli nella
fase dell’ispirazione, mentre l’espirazione e dovuta all’elasticita tissutale. Raccolse le sue
scoperte nell’opera “De Motu Animalium”, pubblicato postumo e da molti definito come
il vero e proprio inizio della biomeccanica.
2

Cap.1 Il fascino del moto
Figura 1.2: Giovanni Alfonso Borelli, padre della biomeccanica
Borelli fu certamente tra i primi ad effettuare, in campo biologico, quelle operazioni di
idealizzazione della realta naturale indicate dalla rivoluzione galileiana.
e interessante la descrizione che Borelli fornisce dell’uomo che cammina
“L’uomo non avanzerebbe se sollevasse solo alternativamente i piedi da terra e li rimet-
tesse poi nelle stesse posizioni dalle quali li aveva alzati, ma occorre che cambi posto sul piano
dell’orizzonte, muovendo in avanti tutta la mole del corpo umano. Bisogna dunque ricercare
con quali organi e con quali azioni avvenga cio. Ad un primo sguardo il camminare umano
si puo paragonare al movimento di un compasso...”
Questa descrizione, sebbene affascinante dal punto di vista estetico, mostra come lo
studio biomeccanico fosse ancora ad un livello embrionale, sia per le scarse conoscenze
fisiche sia per l’impossibilita di vedere il fenomeno ad una velocita ridotta. All’inizio per
ambedue questi motivi, poi per il secondo soltanto, gli studiosi del diciottesimo secolo
e di buona parte del diciannovesimo furono condannati ad una visione quasi-statica del
fenomeno uomo in movimento.
e solo con la nascita dell’analisi del movimento, ad opera di Eadweard Muybridge
(1830-1904) in America e Ettiene-Jules Marey (1830-1904) in Francia, che fu possibile ef-
3
Cap.1 Il fascino del moto
fettuare il decisivo passaggio dalla statica alla dinamica. L’opera di Marey “La machine
animal, locomotion terrestre et arienne” segna la nascita della cronofotografia e del supe-
ramento dei limiti sensoriali del ricercatore, consentendo un’analisi piu approfondita del
fenomeno movimento umano.
L’era moderna per la disciplina della biomeccanica comincia negli ultimi anni del Nove-
cento con i lavori sulla locomozione umana di Wilhelm Braune (1831-1892) e Otto Fischer
(1861–1916). Mediante tecniche stereofotogrammetriche questi studiosi riuscirono a ricava-
re le traiettorie di punti di repere anatomici, insieme alle relative velocita ed accelerazioni;
furono anche tra i primi a determinare alcune delle forze agenti all’interno del corpo uma-
no. Nella prima meta del ventesimo secolo non ci furono grandi innovazioni dal punto di
vista della descrizione meccanica del movimento umano, ma piuttosto nuove conoscenze
nel campo della neurofisiologia indagarono sui meccanismi regolatori del Sistema Nervoso
Centrale e fornirono una visione piu precisa dei processi di comando dei movimenti e della
natura riflessa di alcune azioni motorie, grazie soprattutto al contributo degli scienzia-
ti russi I.P. Pavlov (1839-1936) e I.M. Secenov (1829-1905), ed alla scoperta del riflesso
condizionato. Nel 1967 lo scienziato russo N. A. Bernstein (1896-1966) presento la sua
tesi sul carattere circolare dei processi di comando, con la quale intuı che e impossibile
capire il movimento, senza tenere conto della meccanica e delle caratteristiche dei muscoli
“attuatori” del movimento stesso. Gran parte dello sviluppo della biomeccanica si deve
alla scuola russa dell’ex URSS, in particolare la sua evoluzione in ambito sportivo. Nel
1939 venne pubblicato il manuale “La biomeccanica degli esercizi fisici” redatto da E.A.
Kotikov, docente di biomeccanica presso l’Universita di Leningrado. Nel 1958 la biomecca-
nica divento studio obbligatorio in tutte le scuole superiori di educazione fisica dell’URSS.
I paesi socialisti (URSS), durante la Guerra Fredda, tentarono di dimostrare la propria
supremazia attraverso l’unico punto di contatto con i paesi occidentali, cioe le manifesta-
zioni sportive internazionali. La ricerca biomeccanica si presto perfettamente allo scopo;
solo successivamente anche nel resto d’Europa e negli USA cominciano a circolare e a
4

Cap.1 Il fascino del moto § 1.1 Modelli matematici
diffondersi traduzioni di testi che illustravano i principi biomeccanici.
Ad oggi, l’analisi del movimento trova spazio in molti settori:
� medico, sia clinico che riabilitativo;
� scientifico, per lo studio del movimento;
� sportivo, per l’analisi del gesto sportivo;
� cinematografico e ludico, nei film di animazione e nei videogiochi di ultima genera-
zione.
Esistono molti sistemi per la cattura e l’analisi del movimento; sicuramente il gold standard
e rappresentato dai sistemi ottici, come il Vicon, ma accanto a questi sistemi ne sono fioriti
molti altri: inerziali, elettromagnetici, o basati sull’uso di accelerometri o goniometri.
Ognuno di questi sistemi ha pregi e difetti. Nel seguito si fara riferimento solamente a
sistemi ottici, sicuramente i piu diffusi in ambito scientifico e commerciale.
1.1 Modelli matematici
Esistono varie classificazioni dei modelli matematici utilizzati per caratterizzare la cine-
matica e la dinamica dei corpi; ogni classificazione mette in luce aspetti diversi dei modelli
stessi. Una prima classificazione e quella che divide i modelli in fenomenologici ed anato-
mici. I primi sono sicuramente piu rudimentali dei secondi, poiche descrivono il compor-
tamento dei corpi in esame senza addentrarsi in una dettagliata modellazione delle loro
strutture; i secondi, pero, richiedendo un’accurata descrizione della geometria dei corpi
indagati, nonche delle proprieta meccaniche dei materiali che li costituiscono, non sono
adatti alla descrizione di sistemi complessi di corpi. Tipicamente vengono quindi utilizzati
nello studio di singole articolazioni.
Una seconda classificazione che puo essere adottata riguarda lo scopo per il quale il modello
e stato realizzato; adottando tale classificazione, ad esempio si avranno:
5

Cap.1 Il fascino del moto § 1.1 Modelli matematici
� modelli predittivi, in cui si usano sistemi di motion capture per creare un modello
che predica il moto futuro del corpo in esame, ad esempio per analizzare i movi-
menti anticipatori di aggiustamento della postura. L’autore di riferimento in questo
ambito e Chaffin [13], il cui modello si basa sulla regressione: un gran numero di
dati vengono collezionati con una strumentazione che permette di catturare il mo-
vimento, compresi gli andamenti temporali degli angoli tra i segmenti corporei in
esame. Questi angoli sono poi input per il modello di regressione, che e usato per
predire l’andamento dell’angolo tra i segmenti corporei in un task simile; il problema
di questo modello e che non sempre i movimenti predetti sono attuabili. Un altro
metodo, sviluppato da McGuan [38] con l’utilizzo del software ADAMS (Mechanical
Dynamics, MSC Softwares), usa la motion capture per predire il moto e fa ricorso
ad un sistema di controllo per scartare movimenti fisicamente inattuabili.
� modelli per l’analisi di un singolo movimento, con applicazioni in scienza dello sport,
medicina, ortopedia e ergonomia; in questo caso tipicamente si modella solamente il
distretto corporeo di interesse. Il movimento sicuramente piu analizzato e il cammi-
no; gli autori piu autorevoli in questo campo sono Winter [49], Anderson & Pandy
[4], Davy & Audu [21]. Molti altri movimenti sono stati presi in esame, come ad
esempio il salto, il calcio, il sollevamento da posizione seduta o il maneggiamento di
un oggetto.
� modelli per la creazione di realta virtuali, utilizzati soprattutto nella computer gra-
phic e nella simulazione di eventi. Esistono in commercio molti software basati su
tali modelli. Un impiego alternativo e stato sviluppato da un team italiano per l’ana-
lisi della postura: questi autori hanno creato un modello 3D parametrico total body
(LAMPO). I parametri da settare sono ricavabili a partire dalle posizioni dei mar-
kers ottenute mediante sistema optoelettronico, e tali parametri vengono utilizzati
per adattare i parametri antropometrici presenti nel modello al soggetto in esame.
6
Cap.1 Il fascino del moto § 1.1 Modelli matematici
Con questa caratterizzazione si ricavano le dimensioni dei vari segmenti ossei, non-
che la loro posizione; mediante un software di modellazione grafica 3D si ottiene la
ricostruzione tridimensionale dello scheletro del soggetto. Con tale approccio si puo
studiare la postura del soggetto, e valutare in tempo reale le correzioni alla postura
apportate mediante applicazione di dispositivi correttivi.
Un’ulteriore classificazione distingue i modelli sulla base delle grandezze che vengono for-
nite in input e in output; in questo caso si parlera di modelli cinematici, se si indagano
le relazioni tra i parametri del moto senza correlarli alle condizioni di carico, mentre si
parlera di modelli cinetici se nel modello si cerca la relazione tra parametri del moto e
carichi applicati. Ovviamente i modelli cinetici sono piu approfonditi, poiche legano il
moto alle cause che l’hanno generato. Questi modelli sono ulteriormente classificati in
statici e dinamici. I primi determinano le forze e i parametri del moto in condizioni di
equilibrio per varie posizioni assunte dal corpo in esame; i modelli statici sono stati studia-
ti piu approfonditamente poiche, rispetto a quelli dinamici, presentano notevoli vantaggi
relativamente alla semplicita di modellazione e computazionale. Nei modelli statici, pero,
non vengono tenuti in conto gli effetti di carichi inerziali, e questo puo comportare di sot-
tostimare notevolmente lo stess sul sistema muscoloscheletrico, come mostrato da Ayoub
e Bernard [6, 9]. Per questo motivo i modelli piu diffusi sono sicuramente quelli dinamici,
che risolvono le equazioni del moto, soggetto a vincoli, per ottenere le forze e i parametri
del moto sotto condizioni dinamiche di carico.
Storicamente lo studio della dinamica si divide in due branche:
� dinamica diretta, se sono note le forze agenti sul corpo e da queste si vuole ricavare
il movimento del corpo stesso;
� dinamica inversa, se invece e noto il movimento e si vogliono conoscere le forze che
lo hanno causato.
7

Cap.1 Il fascino del moto § 1.2 Studio biomeccanico
Per questo motivo convenzionalmente si parla di modelli dinamici diretti e inversi; bisogna
notare, tuttavia, che il modello matematico in se non differisce tra dinamica diretta e
inversa, quello che cambia e solamente la scelta di quali gradezze considerare come dati
noti e quali invece come incognite da ricavare.
Di seguito verranno presi in considerazione solamente i modelli dinamici fenomenolo-
gici, poiche il modello sviluppato in questo lavoro di tesi appartiene a questa categoria.
1.2 Studio biomeccanico
L’obiettivo in biomeccanica e quello di ottenere modelli matematici in grado di descrivere
le proprieta dinamiche dello scheletro e i processi elettrochimici e fisiologici che avvengono
a livello cellulare e che determinano lo sviluppo della forza muscolare. Dal momento che la
deformazione elastica delle ossa puo essere trascurata nella maggior parte dei movimenti
umani, lo scheletro puo essere modellato come costituito da corpi rigidi, e si puo fare
ricorso all’approccio dei sistemi multibody. Applicando quindi i principi della meccanica
si derivano le equazioni del moto per il sistema di corpi in esame, e queste equazioni,
associate allle equazioni che esprimono i vincoli agenti sui corpi, formano un sistema di
equazioni algebrico-differenziali. Alla fine si avra un sistema di corpi rigidi, ognuno dotato
di una massa e di un momento di inerzia e connesso agli altri mediante coppie ideali prive
di attrito.
Inserendo ora nel modello anche i muscoli, a causa del problema della ridondanza
presente nel reclutamento muscolare, si dovra fare ricorso a tecniche di controllo ottimo.
Tenendo in conto tutte queste azioni si possono realizzare modelli muscoloscheletrici di
tutto il corpo umano; i maggiori esponenti in questo ambito sono Eberhard [25] e Rasmus-
sen [20], il cui modello e alla base del software commerciale AnyBody (Anybody Modeling
System TM). Modelli muscoloscheletrici sono stati sviluppati anche per singoli distretti
corporei, vedi Pennestrı [41] per l’arto superiore e Zajac [31] per quello inferiore.
8
Cap.1 Il fascino del moto § 1.2 Studio biomeccanico
Il problema maggiore presentato da questo tipo di modelli e la loro complessita, soprat-
tutto dovuta alla ridondanza del sistema muscolare, a causa della quale un dato esercizio
puo essere compiuto seguendo infiniti possibili moti. Sorge cosı il problema di compren-
dere il motivo per cui un dato individuo usa una specifica postura o moto; la postura
ed il moto dipendono dalla fisiologia, da strutture anatomiche individuali, da abitudini
personali, dall’esercizio, dalla motivazione e dall’ambiente in cui il moto ha luogo. Gli
esseri umani non solo si muovono in maniera differente gli uni dagli altri, ma si muovono
in maniera diversa a seconda dell’esercizio che intendono compiere e dei vincoli ambientali
che li circondano.
La ridondanza del sistema muscolare comporta che l’attivazione muscolare non puo
essere ricavata direttamente dalla dinamica inversa, e l’impostazione di un problema di
controllo ottimo e un processo complesso il cui risultato non e univoco. Inoltre, nelle
equazioni che bisogna risolvere per ricavare l’attivazione muscolare si devono impostare
molti parametri muscolari. Alcuni si possono ricavare da misure sperimentali, ma altri
devono essere presi dalla letteratura; poiche pero il valore di tali parametri e generalmente
variabile da soggetto a soggetto, la scelta del valore deve essere ponderata e verificata
sperimentalmente.
Per questi motivi molti autori hanno preferito sviluppare modelli in cui non vengono
presi in considerazione i muscoli, se non come azioni complessive sul sistema scheletrico
che generano il movimento. I modelli biomeccanici che non tengono in considerazione
i muscoli vengono detti scheletrici; questi ultimi, per essere veramente realistici, devono
modellare tutto il corpo e devono poter prevedere dei movimenti tridimensionali dei suoi
segmenti. Questo tipo di modelli ha una complessita computazionale notevole, che per
essere gestita ha bisogno di un calcolatore potente.
9

Cap.1 Il fascino del moto § 1.3 Motivazioni e metodi del presente lavoro di tesi
1.3 Motivazioni e metodi del presente lavoro di tesi
La valutazione biomeccanica del gesto lavorativo e attualmente fondata sull’impiego dello
standard ISO 11228, che richiede valutazioni di natura oggettiva e soggettiva. L’impor-
tanza di tale valutazione deriva soprattutto dalla necessita di certificare la non pericolosita
del gesto medesimo per la persona che lo compie.
Il lavoro svolto in questa tesi vuole essere un contributo per rendere piu oggettiva la
valutazione biomeccanica del gesto lavorativo e metterla quindi in relazione a grandezze
cinematiche rilevate sperimentalmente mediante l’impiego di un sistema optoelettronico.
Le grandezze dinamiche coinvolte nel gesto lavorativo, ovvero le coppie articolari, sono
state qui stimate utilizzando le equazioni della dinamica dedotte tramite metodologia
multibody.
Il modello biomeccanico sviluppato e un modello 2D total body implementato in lin-
guaggio Matlab; esso viene descritto nel dettaglio nel capitolo 6. La scelta di un approccio
bidimensionale e stata dettata da due circostanze: la prima e che il notevole aumento
della complessita di calcolo avrebbe richiesto prestazioni molto superiori di quelle che ha il
computer sul quale e stato fatto girare il modello, la seconda e che per i movimenti che si
intendeva analizzare, movimenti in gran parte compresi all’interno di un piano anatomico,
non era necessario ricorrere ad una formulazione tridimensionale. Il modello ricostruisce
traiettorie, velocita ed accelerazioni dei centri di massa, nonche le reazioni vincolari e le
coppie alle articolazioni. Gli input necessari sono le posizioni iniziali dei centri di massa,
le forze applicate ai corpi, i dati antropometrici, come masse e momenti d’inerzia dei seg-
menti, e i vincoli reonomi. Questi ultimi sono l’unica informazione richiesta dal modello
in ogni istante di tempo considerato. Tali input vengono in parte presi dalla letteratura
(per i dati antropometrici) e per la restante parte vengono ricavati sperimentalmente con
l’ausilio di un sistema optoelettronico. Le equazioni del moto del sistema vincolato sono
risolte, applicando la formulazione di Udwadia-Kalaba, che fa uso del principio di minima
10

Cap.1 Il fascino del moto § 1.4 Overview della tesi
azione di Gauss per ricavare le accelerazioni del sistema vincolato. Attraverso un processo
di integrazione numerica, poi, si derivano velocita e accelerazioni.
Dopo una fase di validazione, il modello e stato applicato all’analisi della sicurezza
sul lavoro in caso di movimentazione manuale dei carichi: analizzando la normativa vi-
gente si e rilevato che essa e basata su un metodo sviluppato dal National Institute for
Occupational Safety and Health che richiede di effettuare valutazioni sia oggettive che sog-
gettive, e che tra l’altro e teso ad evitare sforzi dannosi solamente a livello dell’articolazione
lombo-sacrale. I risultati ottenuti sono pienamente in accordo con quanto indicato dalla
normativa. Come caratteristica generale e stato osservato che un sollevamento puo essere
considerato sicuro se il soggetto, adottando piccoli e inconsci aggiustamenti posturali, e in
grado di evitare aumenti drastici delle coppie articolari.
1.4 Overview della tesi
Nel secondo capitolo vengono fornite le basi della dinamica analitica, secondo l’approccio
lagrangiano: partendo dai postulati fondamentali della dinamica si ricava l’equazione sim-
bolica della dinamica continua (PLV). Questa, espressa in termini di spostamenti virtuali
e tenuto conto dei vincoli, porta a ricavare le equazioni di Lagrange. Nel caso particolare
di spostamenti sincroni, integrando il PLV su un intervallo finito di tempo si ottiene il
principio variazionale di Hamilton. Grazie poi al principio di d’Alembert-Lagrange gene-
ralizzato si e arrivato a scrivere le equazioni di Gibbs-Appell, che rappresentano la forma
piu semplice delle equazioni del moto in meccanica lagrangiana. Si e poi provveduto ad
applicare le equazioni di Lagrange a sistemi di corpi, ottenendo il sistema di equazioni
algebrico-differenziali da cui si parte per ricavare il moto del sistema di corpi preso in
esame.
Nel terzo capitolo si ricava la formulazione di Udwadia & Kalaba: si parte dalla clas-
sificazione dei vincoli in olonomi e non-olonomi e si enuncia il principio di minima azione
11
Cap.1 Il fascino del moto § 1.4 Overview della tesi
di Gauss, mediante il quale si ricava l’espressione dell’accelerazione di un sistema vinco-
lato. Questa espressione viene utilizzata per ottenere l’accelerazione del sistema di corpi
in esame anche nel caso in cui i vincoli applicati non siano linearmente indipendenti tra
loro, ma solamente congruenti. Si mostra poi l’equivalenza tra equazione fondamentale di
Gauss e meccanica lagrangiana. Infine, si illustra la formulazione stabilizzata di Baumgar-
te, che permette di tenere sotto controllo le violazioni delle equazioni vincolari che possono
insorgere in seguito all’operazione di integrazione numerica svolta per ricavare velocita e
posizioni a partire dalla conoscenza delle accelerazioni del sistema.
Nel quarto capitolo vengono fornite le definizioni fondamentali della cinematica e ven-
gono ricavate le equazioni vincolari, nonche gli elementi della matrice Jacobiana e del
vettore γ, dovute alla presenza di coppie rotoidali e prismatiche e di vincoli reonomi.
Il quinto capitolo comincia illustrando i principi della ricostruzione fotogrammetrica,
mediante la quale si ricostruisce la posizione nello spazio di una distribuzione di punti a
partire da una serie di proiezioni bidimensionali della distribuzione stessa. Si illustrano
quindi i componenti fondamentali di un sistema di analisi del movimento. Infine, viene
descritto il sistema optoelettronico di analisi del movimento utilizzato.
Il sesto capitolo e dedicato alla descrizione del modello 2D sviluppato che permette
di risolvere il problema dinamico diretto di un sistema di n corpi rappresentati come
aste unidimensionali rigide ed inestensibili connesse tra loro mediante coppie rotoidali o
prismatiche ideali.
Nel settimo capitolo vengono presentate le prove sperimentali svolte e i risultati conse-
guiti per validare il modello e per confrontare i suoi risultati con quelli ricavati dal sistema
optoelettronico.
Nell’ottavo capitolo si decrive come il modello sia stato utilizzato per verificare la
validita della normativa esistente sulla movimentazione manuale dei carichi.
12

Capitolo 2Dinamica analitica
I modelli matematici per l’analisi dinamica di sistemi costituiti da corpi rigidi rientrano in
due categorie per quanto riguarda le equazioni che li governano:
� sistemi vincolati, cioe sistemi in cui il numero di coordinate utilizzate per descriverli
eccede il numero di gradi di liberta del sistema;
� sistemi con un numero minimo di coordinate.
Nel primo caso le equazioni del moto che si derivano formano un set di equazioni algebrico-
differenziali, computazionalmente inefficiente da risolvere, e affetto dal problema della
violazione dei vincoli.
L’altro approccio e quello di utilizzare un numero minimo di coordinate, che danno vita
ad un sistema di equazioni differenziali ordinarie di semplice integrazione numerica e non
affetto dal problema della violazione dei vincoli. Per un confronto tra le due metodologie
sara utile consultare [10]. Purtoppo la formulazione con un numero minimo di coordinate
puo essere molto complessa, soprattutto per sistemi con un numero di corpi elevato; per
questo motivo di seguito si ricaveranno le equazioni del moto solamente per il caso di
sistema descritto da un numero sovrabbondante di coordinate. Dopo aver ricavato tali
equazioni, si mostrera un metodo che permette di passare da un sistema costituito da
13

Cap.2 Dinamica analitica § 2.1 Sistema di riferimento
equazioni algebrico-differenziali ad un sistema di sole equazioni differenziali, e infine si
mostrera la formulazione stabilizzata di Baumgarte [7, 8], che permette di risolvere il
problema della violazione delle equazioni vincolari.
2.1 Sistema di riferimento
Per descrivere matematicamente un fenomeno meccanico e necessario anzitutto definire
un sistema di riferimento. Mentre in cinematica il s.d.r. puo essere scelto in maniera
arbitraria, in dinamica la scelta del s.d.r. influenza la forma delle equazioni di moto. Si
vorrebbe, pertanto, scegliere un sistema di riferimento rispetto al quale le equazioni del
moto abbiano la forma piu semplice possibile.
Osserviamo che, rispetto ad un s.d.r. qualsiasi, lo spazio e eterogeneo e anisotropo,
ed il tempo non e omogeneo; questo implica che, anche se un corpo non interagisce con
un altro corpo, le sue posizioni e orientazioni nello spazio, cosı come i diversi istanti di
tempo, non sono equivalenti. Tuttavia si puo sempre trovare un s.d.r. rispetto al quale
il tempo sia omogeneo e lo spazio omogeneo e isotropo; un s.d.r. siffatto viene chiamato
sistema di riferimento assoluto. La caratteristica fondamentale di tale s.d.r. e che la
sua terna di assi e solidale, o in moto rettilineo uniforme, con le stelle fisse. Il riferimento
temporale assoluto sara proporzionale all’angolo di rotazione della Terra rispetto alle stelle
fisse, mentre il riferimento spaziale assoluto sara misurato rispetto alla terna di assi del
s.d.r. assoluto.
2.2 Postulati fondamentali della dinamica
La derivazione delle formulazioni per la risoluzione della dinamica continua si basa su due
assiomi detti postulati fondamentali della dinamica.
Il primo postulato della dinamica dei sistemi afferma che:
14

Cap.2 Dinamica analitica § 2.3 Relazione simbolica della dinamica continua
Il moto di un sistema di n punti materiali1 P1, P2, ..., Pn, comunque vincolati tra loro
e verso il mondo esterno, puo essere determinato considerando i punti materiali privi di
vincoli, purche si aggiungano alle forze attive le reazioni vincolari che i vincoli esercitano
su di essi.
Il secondo postulato della dinamica dei sistemi, invece, afferma che:
Il lavoro (la potenza) delle reazioni vincolari in un sistema di n punti materiali
P1, P2, ..., Pn soggetto a vincoli lisci (o ideali), unilateri o bilateri, non e mai negativo
(negativa) per ogni atto di moto virtuale.
Di conseguenza, se l’atto di moto e reversibile e i vincoli sono lisci, unilateri o bilateri,
il lavoro (la potenza) delle reazioni vincolari e nullo.
Da questi postulati discendono la relazione simbolica della dinamica continua e l’ equazione
simbolica della dinamica continua, valide per sistemi qualsiasi, olonomi o anolonomi.2
2.3 Relazione simbolica della dinamica continua
Definite ~Fi la risultante delle forze attive e ~Ri la risultante delle reazioni vincolari agenti
sul generico punto materiale Pi (i = 1, 2, ..., n) di massa mi e accelerazione ~ri, dal primo
postulato si ricava che:
~Fi + ~Ri = mi~ri i = 1, 2, ..., n (2.1)
La relazione precedente puo essere riscritta come:
1Per punto materiale o particella si intende una particella che abbia dimensioni trascurabili rispettoallo spostamento cui e sottoposta, e possa quindi essere immaginata occupare un punto nello spazio.
2Un vincolo che si traduce in una relazione in termini finiti (o in ternini differenziali ma integrabili)tra le n coordinate e detto olonomo; tale vincolo non permette al sistema di raggiungere tutte le ∞n
configurazioni che raggiungerebbe se non fosse vincolato.Un vincolo anolonomo, invece, si traduce in una relazione differenziale non integrabile tra le n coordinate;tale vincolo permette al sistema di raggiungere tutte le∞n configurazioni che raggiungerebbe se non fossevincolato, ma impone delle limitazioni al modo in cui il sistema, partendo da una configurazione, ne puoraggiungere un’altra.
15

Cap.2 Dinamica analitica § 2.3 Relazione simbolica della dinamica continua
~Fi −mi~ri = −~Ri i = 1, 2, ..., n (2.2)
Moltiplicando scalarmente ambo i membri per lo spostamento virtuale3 δ~ri del generico
punto materiale Pi e sommando su tutti i punti materiali del sistema si ricava il lavoro
virtuale delle forze agenti sul sistema:
δL =n∑
i=1
(~Fi −mi
~ri
)· δ~ri = −
n∑i=1
~Ri · δ~ri (2.3)
Se invece si moltiplicano scalarmente ambo i membri della (2.2) per la velocita virtuale
δ~ri del generico punto materiale Pi e sommando su tutti i punti materiali del sistema si
ottiene la potenza virtuale delle forze agenti sul sistema:
δΠ =n∑
i=1
(~Fi −mi
~ri
)· δ~ri = −
n∑i=1
~Ri · δ~ri (2.4)
Per il secondo postulato inoltre, se i vincoli sono lisci, si ha:
n∑i=1
~Ri · δ~ri ≥ 0 (2.5)
e
n∑i=1
~Ri · δ~ri ≥ 0 (2.6)
Da cui si ricava
δL =n∑
i=1
(~Fi −mi
~ri
)· δ~ri ≤ 0 (2.7)
3Spostamento virtuale di un punto P, che si trova all’istante to nella posizione ~ro, e uno degli infinitispostamenti elementari tangenti alla traiettoria passante per ~ro che il punto puo compiere con vincoliirrigiditi all’istante di tempo to.
16

Cap.2 Dinamica analitica § 2.4 Equazione simbolica della dinamica continua
δΠ =n∑
i=1
(~Fi −mi
~ri
)· δ~ri ≤ 0 (2.8)
Quest’ultima disequazione e detta relazione simbolica della dinamica continua.
2.4 Equazione simbolica della dinamica continua
Se l’atto di moto e reversibile, se quindi i vincoli permettono di sostituire δ~ri con −δ~ri e
δ~ri con −δ~ri, si ottiene:
n∑i=1
~Ri · δ~ri = 0 (2.9)
n∑i=1
~Ri · δ~ri = 0 (2.10)
e quindi
δL =n∑
i=1
(~Fi −mi
~ri
)· δ~ri = 0 (2.11)
δΠ =n∑
i=1
(~Fi −mi
~ri
)· δ~ri = 0 (2.12)
La relazione (2.11) viene detta equazione simbolica della dinamica continua, o Principio
dei Lavori Virtuali (PLV), mentre l’equazione (2.12) e nota come Principio delle Potenze
Virtuali (PPV). E bene sottolineare che questi principi hanno origine ben diversa da quella
qui riportata e basata su un approccio assiomatico; per approfondimenti si puo vedere [12].
17

Cap.2 Dinamica analitica § 2.5 Principio di d’Alembert
2.4.1 Relazione ed equazione simbolica della Statica
Dalla relazione e dall’equazione simbolica della dinamica continua si possono dedurre la
relazione e l’equazione fondamentali della statica; ponendo ~ri = 0 nelle equazioni (2.7) e
(2.11) si ha:
n∑i=1
F · δ~ri ≤ 0 (2.13)
n∑i=1
F · δ~ri = 0 (2.14)
o anche dalle equazioni (2.8) e (2.12):
n∑i=1
F · δ~ri ≤ 0 (2.15)
n∑i=1
F · δ~ri = 0 (2.16)
dette rispettivamente relazione simbolica della Statica ed equazione simbolica della Statica.
2.5 Principio di d’Alembert
Confrontando le equazioni (2.7), (2.8) con le (2.13), (2.15), e le equazioni che esprimono il
PLV e il PPV (equazioni (2.11)(2.12)) con le (2.14) e (2.16) si deduce che la forza ~Fi−mi~ri
soddisfa la condizione di equilibrio, ovvero la forza d’inerzia −mi~ri equilibra in ogni istante
di tempo le forze attive agenti sul punto Pi.
Tuttavia si puo dare un’altra interpretazione alla forza ~Fi−mi~ri, riscrivendo l’equazione
(2.2) come:
18

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
(~Fi −mi
~ri
)+ ~Ri = 0 (2.17)
Il termine ~Fi−mi~ri equilibra la reazione vincolare ~Ri, e puo quindi essere visto come una
forza spesa per effetto dei vincoli. A patto di sostituire alle forze attive le forze perdute
e percio possibile passare dalle equazioni di equilibrio statico alle equazioni di equilibrio
dinamico del sistema. Questo principio e noto come Principio di d’Alembert. Esso, pur non
esprimendo niente di nuovo dal punto di vista matematico, e di fondamentale importanza
perche permette di ricondurre un qualsiasi problema di equilibrio statico al corrispondente
problema dinamico e viceversa.
2.6 Equazioni di Lagrange
Le equazioni di Lagrange rappresentano un potente strumento per dedurre le equazioni
del moto di un sistema meccanico.
Si consideri un sistema olonomo costituito da n punti materiali Pi (i = 1, 2, ..., n) soggetto
a vincoli lisci e bilateri; siano x1, x2, ..., xN le N coordinate generalizzate4 del sistema,
con N=3n in generale nello spazio euclideo. Il moto del punto materiale Pi sara funzione
delle N coordinate del sistema, e in presenza di vincoli reonomi, del tempo t :
~ri = ~ri (x1, x2, ..., xN , t) = ~ri(~x, t) i = 1, 2, ..., n (2.18)
Per derivazioni successive si ricavano la velocita e l’accelerazione del generico punto ma-
teriale Pi:
~ri =d~ridt
=N∑k=1
∂~ri∂xk
xk +∂~ri∂t
(2.19)
4In meccanica razionale un sistema di coordinate generalizzate (o lagrangiane) e un sistema dicoordinate, di numero pari ai gradi di liberta del sistema, che determina univocamente lo stato del sistema.
19

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
~ri =d2~ridt2
=N∑k=1
∂~ri∂xk
xk +N∑k=1
N∑j=1
∂~ri∂xk∂xj
xkxj +∂2~ri∂t2
(2.20)
Avvalendosi della regola pratica per il calcolo degli spostamenti virtuali5 si ottiene facil-
mente:
δ~ri =N∑k=1
∂~ri∂xk
δxk (2.21)
Poiche il sistema e olonomo, esisteranno s equazioni che descrivono i vincoli ( s < N ), e
sara possibile esprimere queste equazioni in termini finiti in funzione delle N coordinate e
del tempo t :
ϕh = ϕh (x1, x2, ..., xN , t) = ϕh(~x, t) = 0 h = 1, 2, ..., n (2.22)
Poiche inoltre gli spostamenti virtuali devono essere compatibili con i vincoli, segue neces-
sariamente che tali spostamenti devono soddisfare la relazione:
N∑k=1
∂ϕh
∂xkδxk = 0 (2.23)
L’equazione simbolica della dinamica continua in termini di spostamenti virtuali puo quindi
essere riscritta come:
δL =N∑k=1
n∑i=1
(~Fi −mi
~ri
)· ∂~ri∂xk
δxk = 0 (2.24)
Occorre tuttavia notare che in questa equazione non compaiono i vincoli; per ottenere
un’equazione di moto che tenga conto anche della presenza dei vincoli occorre introdurre
nell’equazione (2.31) l’equazione (2.23); per fare cio si osservi che, per definizione, gli spo-
5Si calcolano gli spostamenti differenziali effettivi d~ri, facendo comparire i differenziali dqk delle coor-dinate e il differenziale dt del tempo, quindi si sostituiscono i differenziali dqk con gli spostamenti virtualiδqk e si pone il differenziale dt pari a zero.
20

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
stamenti virtuali sono compatibili con i vincoli, e quindi e possibile tenere conto nell’equa-
zione (2.31) della presenza dei vincoli introducendo s moltiplicatori arbitrari λ1, λ2, ..., λs
detti moltiplicatori di Lagrange:
n∑i=1
(~Fi −mi
~ri
)· ∂~ri∂xk
=s∑
h=1
λh∂ϕh
∂xkk = 1, 2, ..., N (2.25)
Infatti, sostituendo la (2.25) nella (2.31) si ricava:
N∑k=1
s∑h=1
λh∂ϕh
∂xkδxk =
s∑h=1
λh
N∑k=1
∂ϕh
∂xkδxk (2.26)
che, per la (2.23), e identicamente nulla.
Le N equazioni scalari (2.25) dipendono, oltre che dagli s moltiplicatori di Lagrange,
dalle variabili xk e dalle loro derivate prime e seconde rispetto al tempo. Queste equazioni,
associate alle relazioni algebriche (2.28), consentono di determinare il valore dei moltipli-
catori di Lagrange e l’andamento delle coordinate xk, una volta che siano assegnate le
condizioni iniziali di integrazione, e vengono dette prima forma delle equazioni di Lagran-
ge. Tali equazioni hanno il vantaggio di consentire di scrivere le equazioni del moto di un
qualsiasi sistema in modo automatico, ma hanno lo svantaggio di introdurre un numero
sovrabbondante di incognite (N coordinate e s moltiplicatori, con un numero di g.d.l. del
sistema pari a N-s).
Si vuole ora derivare la seconda forma delle equazioni di Lagrange; per farlo si consideri un
sistema olonomo costituito da n punti materiali Pi (i = 1, 2, ..., n) soggetto a vincoli lisci
e bilateri; siano q1, q2, ..., qo le o coordinate libere, o coordinate lagrangiane, del sistema
(con n° g.d.l.=o). Il moto del generico punto materiale Pi sara funzione delle o coordinate
libere del sistema, e in presenza di vincoli reonomi, del tempo t :
~ri = ~ri (q1, q2, ..., qo, t) = ~ri(~q, t) i = 1, 2, ..., n (2.27)
21

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
Si potranno calcolare la velocita e l’accelerazione del punto come:
~ri =d~ridt
=o∑
k=1
∂~ri∂qk
qk +∂~ri∂t
(2.28)
~ri =d2~ridt2
=o∑
k=1
∂~ri∂qk
qk +o∑
k=1
o∑j=1
∂~ri∂qk∂qj
qkqj +∂2~ri∂t2
(2.29)
Come sopra, dall’equazione (2.28) si ricava:
δ~ri =o∑
k=1
∂~ri∂qk
δqk (2.30)
L’equazione simbolica della dinamica continua scritta in termini di spostamenti virtuali
sara:
δL =o∑
k=1
n∑i=1
(~Fi −mi
~ri
)· ∂~ri∂qk
δqk = 0 (2.31)
Poiche tale equazione deve essere verificata per ogni spostamento virtuale segue necessa-
riamente che:n∑
i=1
(~Fi −mi
~ri
)· ∂~ri∂qk
= 0 k = 1, 2, ..., o (2.32)
Le equazioni appena ricavate sono o equazioni differenziali del secondo ordine nelle o
coordinate lagrangiane qk = qk(t); note 2o condizioni iniziali mediante integrazione si
risale al moto del sistema. Si procedera ora alla riscrittura di queste equazioni in una
forma piu canonica; per farlo si parte dall’espressione dell’energia cinetica del sistema
considerato:
T =1
2
n∑i=1
mi~ri · ~ri (2.33)
e in tale espressione si sostituisce l’espressione della velocita del generico punto materiale
Pi:
22

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
T =1
2
n∑i=1
mi
(o∑
k=1
∂~ri∂qk
qk +∂~ri∂t
)·
(o∑
h=1
∂~ri∂qh
qh +∂~ri∂t
)(2.34)
Sviluppando ora tale espressione si avra:
T =1
2
o∑k=1
o∑h=1
(n∑
i=1
mi∂~ri∂qk· ∂~ri∂qh
)qkqh +
o∑k=1
(n∑
i=1
mi∂~ri∂qk· ∂~ri∂t
)qk+
+
(1
2
n∑i=1
mi∂~ri∂t· ∂~ri∂t
)(2.35)
Se i vincoli sono fissi l’espressione dell’energia cinetica si semplifica notevolmente, diven-
tando una funzione quadratica omogenea in ~q:
T =1
2
o∑k=1
o∑h=1
(n∑
i=1
mi∂~ri∂qk· ∂~ri∂qh
)qkqh (2.36)
Derivando l’espressione dell’energia cinetica rispetto a qk e rispetto a qk si ottiene:
∂T
∂qk=
n∑i=1
mi~ri ·
∂~ri∂qk
(2.37)
∂T
∂qk=
n∑i=1
mi~ri ·
∂~ri∂qk
(2.38)
Derivando inoltre l’espressione della velocita ~ri del generico punto materiale Pi rispetto a
qk si ha:
∂~ri∂qk
=∂~ri∂qk
(2.39)
Sostituendo l’ultima espressione nella (2.38) si avra:
∂T
∂qk=
n∑i=1
mi~ri ·
∂~ri∂qk
(2.40)
23

Cap.2 Dinamica analitica § 2.6 Equazioni di Lagrange
Derivando infine rispetto al tempo
d
dt
∂T
∂qk=
n∑i=1
mi~ri ·
∂~ri∂qk
+n∑
i=1
mi~ri ·
∂~ri∂qk
(2.41)
Indicando con Qk le componenti della forza attiva secondo le coordinate libere qk e con
Qik le componenti opposte alle forze d’inerzia:
Qk =n∑
i=1
~Fi ·∂~ri∂qk
k = 1, 2, ..., o (2.42)
Qik =n∑
i=1
mi~ri ·
∂~ri∂qk
k = 1, 2, ..., o (2.43)
e ricordando la (2.37) si puo riscrivere l’equazione (2.32) come:
d
dt
∂T
∂qk− ∂T
∂qk= Qk k = 1, 2, ..., o (2.44)
Le precedenti o equazioni scalari vengono dette seconda forma delle equazioni di Lagrange,
o anche semplicemente equazioni di Lagrange. Queste equazioni dicono che se due sistemi
hanno la stessa espressione dell’energia cinetica (in coordinate lagrangiane) e le stesse com-
ponenti delle forze attive, allora essi sono dinamicamente equivalenti, poiche presentano le
stesse equazioni di moto.
Un caso particolare, e particolarmente importante, e quello in cui le forze attive siano
posizionali e conservative, ovvero, detto U il potenziale delle componenti lagrangiane delle
forze attive, sia valida la:
Qk =∂U
∂qkk = 1, 2, ..., o (2.45)
24

Cap.2 Dinamica analitica § 2.7 Principio variazionale di Hamilton
In questo particolare caso le equazioni di Lagrange si potranno riscrivere nella forma:
d
dt
∂T
∂qk− ∂T
∂qk=∂U
∂qkk = 1, 2, ..., o (2.46)
L’energia cinetica del sistema e funzione delle coordinate lagrangiane ~q, della loro derivata
prima ~q e, se i vincoli sono reonomi, del tempo t, mentre l’energia potenziale del sistema
V = −U , nel caso in cui le forze attive siano posizionali e conservative, e funzione delle
sole coordiante libere ~q. Di conseguenza la funzione
L = T + U = T − V (2.47)
sara funzione di ~q, ~q e t :
L = L( ~q, ~q, t) (2.48)
La funzione L e anche detta funzione di Lagrange; si possono riscrivere le equazioni di
Lagrange per sistemi conservativi (eq.ne (2.46)) in termini della funzione di Lagrange,
ottenendo:
d
dt
∂L∂qk− ∂L∂qk
= 0 k = 1, 2, ..., o (2.49)
Un sistema nella forma (2.49) e detto sistema lagrangiano.
2.7 Principio variazionale di Hamilton
Si consideri l’equazione simbolica della dinamica continua (eq.ne (2.11)), e come sposta-
menti virtuali si consideri il caso particolare di spostamenti sincroni6. Si integrino entrambi
6Si definisce sincrono uno spostamento funzione del tempo
25

Cap.2 Dinamica analitica § 2.7 Principio variazionale di Hamilton
i membri dell’equazione (2.11) in un intervallo di tempo [t1, t2]:
t2ˆ
t1
o∑i=1
~Fi · δ~ridt−t2ˆ
t1
o∑i=1
mi~ri · δ~ridt = 0 (2.50)
Definito δ∗L il lavoro virtuale delle forze attive, si puo riscrivere l’equazione precedente
come:t2ˆ
t1
δ∗Ldt−o∑
i=1
mi
t2ˆ
t1
~ri · δ~ridt = 0 (2.51)
Integrando per parti il secondo integrale si ha:
t2ˆ
t1
~ri · δ~ridt =[~ri · δ~ri
]t2t1−
t2ˆ
t1
~ri ·d
dtδ~ridt (2.52)
Il secondo integrale a sua volta puo essere scritto come:
t2ˆ
t1
~ri ·d
dtδ~ridt =
t2ˆ
t1
~ri · δ~ridt =
t2ˆ
t1
1
2δ~r2
i dt =
t2ˆ
t1
δTdt (2.53)
L’equazione (2.51) si potra percio riscrivere:
t2ˆ
t1
(δ∗L+ δT ) dt =o∑
i=1
mi
[~ri · δ~ri
]t2t1
(2.54)
Ma il moto variato sincrono deve rispettare le configurazioni estreme:
[δ~ri]t=t1= 0 [δ~ri]t=t2
= 0 (2.55)
⇒t2ˆ
t1
(δ∗L+ δT ) dt = 0 (2.56)
26

Cap.2 Dinamica analitica § 2.8 Principio di d’Alembert-Lagrange generalizzato
Equazione che esprime il principio variazionale di Hamilton. Nel caso in cui tutte le forze
attive agenti sul sistema siano conservative, detto U il potenziale di tali forze si avra
δ∗L = δU , e quindi:
δ
t2ˆ
t1
(T + U) dt = 0 (2.57)
Il termine tra parentesi quadre non e altri che la funzione lagrangiana, e l’equazione
diventa:
δ
t2ˆ
t1
Ldt = δS = 0 (2.58)
dove S viene detta azione hamiltoniana. Il principio variazionale di Hamilton per sistemi
conservativi potra quindi essere formulato nel modo seguente: il moto naturale di un
sistema materiale, soggetto a vincoli bilateri lisci e a forza conservativa e quello che rende
stazionaria l’azione hamiltoniana S rispetto a tutti i moti variati sincroni che rispettano
le condizioni estreme.
2.8 Principio di d’Alembert-Lagrange generalizzato
Per derivare il principio variazionale di Hamilton si e fatto uso della variazione virtuale δ;
esistono tuttavia principi variazionali che fanno ricorso a variazioni virtuali di ordine supe-
riore. Si definisce allora variazione virtuale di ordine h la variazione infinitesima conforme
ai vincoli della derivata totale di ordine h nel tempo; tale variazione verra indicata come
δh, e puo essere ottenuta calcolando le derivate totali nel tempo della generica variabile qk
e imponendo che tutte le derivate fino all’ordine h-1 siano identicamente nulle:
dh−1qk = dh−2qk = ... = dqk = dt = 0 (2.59)
Detto
~ri = ~ri (q1, ..., qo, t) (2.60)
27

Cap.2 Dinamica analitica § 2.8 Principio di d’Alembert-Lagrange generalizzato
il vettore posizione del generico punto materiale Pi, la sua derivata totale rispetto al tempo
sara
~ri =o∑
k=1
∂~ri∂qk
qk +∂~ri∂t
(2.61)
Derivando questa espressione rispetto a qk si otterra
∂~ri∂qk
=∂~ri∂qk
(2.62)
Derivando nuovamente rispetto al tempo la (2.61) si avra
~ri =o∑
k=1
∂~ri∂qk
qk +o∑
k=1
∂~ri∂tqk +
∂~ri∂t
=o∑
k=1
∂~ri∂qk
qk +o∑
k=1
∂~ri∂qk
qk +∂~ri∂t
(2.63)
La derivata rispetto a qk sara
∂~ri∂qk
=∂~ri∂qk
(2.64)
e, ripetendo il procedimento per la generica derivata di ordine h:
∂~ri∂qk
=∂~ri∂qk
= ... =∂h~ri
∂q(h)k
(2.65)
Ora se nell’equazione simbolica della dinamica continua scritta in termini di spostamen-
ti virtuali (2.31) si sostituiscono le uguaglianze (2.65) si puo riscrivere il principio di
d’Alembert-Lagrange come
δL =o∑
k=1
[n∑
i=1
(~Fi −mi
~ri
)· ∂
(h)~ri
∂q(h)k
]δ(h)qk = 0 (2.66)
Affinche l’uguaglianza sia rispettata, osservato che le variazioni δ(h)qk sono indipendenti
tra loro, necessariamente il termine tra parentesi quadre dovra essere nullo:
n∑i=1
(~Fi −mi
~ri
)· ∂
(h)~ri
∂q(h)k
= 0 (2.67)
28

Cap.2 Dinamica analitica § 2.9 Equazioni di Gibbs-Appell
Introducendo il concetto di forza generalizzata, definita come
Qk =n∑
i=1
~Fi ·∂(h)~ri
∂q(h)k
= ... =n∑
i=1
~Fi ·∂~ri∂qk
=n∑
i=1
~Fi ·∂~ri∂qk
(2.68)
le equazioni (2.67) si possono riscrivere in forma piu compatta come
n∑i=1
mi~ri ·
∂(h)~ri
∂q(h)k
= Qk (2.69)
Ora nel caso particolare in cui h sia pari ad uno l’equazione (2.66) diventera:
δL =o∑
k=1
[n∑
i=1
(~Fi −mi
~ri
)· ∂~ri∂qk
]δqk =
n∑i=1
(~Fi −mi
~ri
)· ∂~ri = 0 (2.70)
uguale all’equazione (2.31); tale equazione prende il nome di principio di Jourdain. Se
invece h=2 allora l’equazione (2.66) diventa
δL =o∑
k=1
[n∑
i=1
(~Fi −mi
~ri
)· ∂
2~ri∂q2
k
]δ2qk =
n∑i=1
(~Fi −mi
~ri
)· ∂−→r i = 0 (2.71)
equazione che esprime il principio di Gauss-Gibbs.
e evidente come dalla (2.66), detta principio di d’Alembert-Lagrange generalizzato, sia
possibile ricavare una serie di principi variazionali.
2.9 Equazioni di Gibbs-Appell
Sfruttando l’equazione (2.65) e l’uguaglianza
1
2
∂
∂qk
(~ri · ~ri
)= ~ri ·
∂~ri∂qk
(2.72)
29

Cap.2 Dinamica analitica § 2.9 Equazioni di Gibbs-Appell
e possibile riscrivere le equazioni (2.69) come
(∂S
∂qk−Qk
)= 0 k = 1, 2, ..., o (2.73)
che esprimono le equazioni di Gibbs-Appell ; in tali equazioni con S si e indicata la cosid-
detta funzione di Gibbs :
S =1
2
n∑i=1
mi~ri · ~ri (2.74)
Le equazioni di Gibbs-Appell sono spesso espresse non in coordinate lagrangiane, bensı
nelle cosiddette quasi coordinate7. Per farlo si devono anzitutto esprimere le coordinate
libere in funzione delle quasi coordinate:
qk = β0k +o∑
j=1
βjkuj k = 1, 2, ..., o (2.76)
Introdotte le quasi coordinate la derivata della velocita del generico punto materiale
rispetto alla coordinata libera sara
∂~ri∂qk
=o∑
j=1
∂~ri∂uj
∂uj∂qk
(2.77)
mentre la variazione virtuale della velocita sara pari a
δ~ri =o∑
k=1
∂~ri∂qk
δqk =o∑
k=1
(o∑
j=1
∂~ri∂uj
∂uj∂qk
)δqk =
7Una variabile uj e detta quasi coordinata se soddisfa le seguenti proprieta:
1. le sue derivate sono combinazioni lineari delle derivate prime delle coordinate lagrangiane, ovvero
uj = aj0 +o∑
k=1
ajkqk j = 1, ..., o (2.75)
dove con ajk si sono indicate delle funzioni differenziabili delle coordinate lagrangiane;
2. le combinazioni lineari (2.75) non sono integrabili.
Un esempio di quasi coordinata e la velocita angolare, perche puo essere espressa come combinazionelineare delle coordinate ma non puo essere integrata.
30

Cap.2 Dinamica analitica § 2.9 Equazioni di Gibbs-Appell
=o∑
j=1
∂~ri∂uj
(o∑
k=1
∂uj∂qk
δqk
)=
o∑j=1
∂~ri∂uj
δuj =o∑
j=1
∂~ri∂uj
δuj (2.78)
avendo sfruttato la sostituzione
δuj =o∑
k=1
∂uj∂qk
δqk (2.79)
e l’uguaglianza
∂~ri∂uj
=∂~ri∂uj
(2.80)
Derivando la funzione di Gibbs rispetto ad uj si ha
∂S
∂uj=
n∑i=1
mi~ri ·∂~ri∂uj
(2.81)
Per esprimere le equazioni di Gibbs-Appell in funzione delle quasi coordinate si riparta
dal principio di Jourdain; tenuto conto delle equazioni (2.78) e (2.81) tale principio si
riscrivera come:
δL =n∑
i=1
(~Fi −mi
~ri
)δ~ri =
n∑i=1
(~Fi −mi
~ri
) o∑j=1
∂~ri∂uj
δuj =
=o∑
j=1
[(n∑
i=1
~Fi ·∂~ri∂uj
)− ∂S
∂uj
]δuj = 0 (2.82)
Introducendo le forze generalizzate in funzione delle quasi coordinate, ovvero
Qj =n∑
i=1
~Fi ·∂~ri∂uj
= ~Fi ·∂~ri∂uj
(2.83)
e ricordando che le variazioni virtuali δuj sono indipendenti, le equazioni di Gibbs-Appell
in funzione delle quasi coordinate saranno:
∂S
∂uj−Qj = 0 j = 1, 2, ..., o (2.84)
31

Cap.2 Dinamica analitica § 2.10 Minimizzazione di una funzione soggetta a vincoli
2.10 Minimizzazione di una funzione soggetta a vin-
coli
Il metodo di seguito riportato e comunemente noto come metodo dei moltiplicatori di
Lagrange e consente di passare da un problema di ottimizzazione vincolata ad un problema
di ottimizzazione senza vincoli. Come esempio si voglia rendere stazionaria una funzione
continua e derivabile L(q1, q2) soggetta al vincolo Ψ(q1, q2) = 0; per farlo si costruisce una
funzione obiettivo
L∗ = L− λΨ (2.85)
nelle variabili q1, q2, λ, con λ una variabile introdotta artificialmente. La condizione di
stazionarieta per L∗ si verifichera se:
∂L∗
∂q1
≡ ∂L
∂q1
− λ∂Ψ
∂q1
= 0 (2.86)
∂L∗
∂q2
≡ ∂L
∂q2
− λ∂Ψ
∂q2
= 0 (2.87)
∂L∗
∂λ≡ Ψ = 0 (2.88)
La soluzione di questo sistema di equazioni coincide necessariamente con la soluzione del
problema di ottimizzazione vincolata.
2.11 Equazioni di Lagrange per sistemi di corpi
Nella formulazione di Hamilton le equazioni della dinamica si ottenevano imponendo la
stazionarieta dell’integrale
δ
t2ˆ
t1
Ldt = 0 (2.89)
32

Cap.2 Dinamica analitica § 2.11 Equazioni di Lagrange per sistemi di corpi
Se si confronta la formulazione lagrangiana con quella hamiltoniana la prima puo esse-
re interpretata come un metodo per rendere stazionario l’integrale presente nella (2.89);
seguendo tale approccio condizione necessaria e sufficiente affinche l’integrale
t2ˆ
t1
L (q1, q2, ..., qn; q1, q2, ..., qn; t) dt (2.90)
sia reso stazionario e che, supposte nulle le variazioni delle variabili agli estremi di inte-
grazione, sia soddisfatto il sistema di equazioni differenziali
d
dt
(∂L
∂qj
)− ∂L
∂qj= 0 j = 1, 2, ..., n (2.91)
Attraverso la formulazione hamiltoniana il problema dell’analisi dinamica di un sistema
vincolato si riconduce ad un problema di ottimizzazione vincolata in cui la funzione obietti-
vo e l’integrale (2.89), mentre i vincoli tra le variabili (coordinate generalizzate) sono quelli
dovuti alla non olonomicita del sistema. Il metodo di ottimizzazione vincolata fondato sui
moltiplicatori di Lagrange richiede l’introduzione di una funzione lagrangiana estesa:
L = T − V − (λ1Ψ1 + ...+ λpΨp) (2.92)
Se si applicano le equazioni di Lagrange alla funzione lagrangiana estesa, e indicati con [M ]
la matrice delle masse, {Fe} il vettore delle forze generalizzate e [Ψq]T la trasposta della
matrice Jacobiana associata al sistema {Ψ} = {0} delle equazioni di vincolo, si perviene
alle seguenti equazioni del moto per il sistema:
[M ] {q}+ [Ψq]T {λ} = {Fe} (2.93)
33
Cap.2 Dinamica analitica § 2.12 Sistema di equazioni algebrico-differenziali
2.12 Sistema di equazioni algebrico-differenziali
L’approccio multibody per la descrizione della dinamica di un sistema meccanico mediante
un set ridondante di coordinate porta alla scrittura di un set di n equazioni differenziali
nelle incognite q1, ..., qn; λ1, ..., λp, oltre ad un set di equazioni algebriche vincolari Ψ1 =
0, ..., Ψp = 0. In totale si avranno n+p incognite in n+p equazioni algebrico-differenziali
(DAE).
La formulazione cosiddetta ridondante offre sostanziali vantaggi quali:
� caratteristiche cinematiche dei membri ottenute simultaneamente e senza calcoli
aggiuntivi;
� semplicita di sviluppo e manutenzione del codice di calcolo;
� possibilita di calcolo delle reazioni vincolari nelle coppie cinematiche;
� impiego di algoritmi ottimizzati per le matrici sparse.
Per contro, questa formulazione richiede la generazione e la soluzione di un sistema di
equazioni algebrico-differenziali di indice differenziale8 elevato. Inoltre, lo studio delle
DAE e molto piu recente e meno sviluppato di quello delle equazioni differenziali ordinarie
(ODE); per le DAE e molto piu difficile stabilire l’esistenza e l’unicita delle soluzioni,
oltre alle proprieta che un metodo di risoluzione numerica deve possedere per trovare una
soluzione accettabile.
Una possibile via per la risoluzione e quella che prevede di differenziare due volte
rispetto al tempo le equazioni di vincolo:
[Ψq] {q} = − ([Ψq] {q})q {q} − 2 [Ψqt] {q} − {Ψtt} = {γ} (2.94)
8Per indice differenziale di un sistema DAE (differential algebraic equation) si intende il numero minimodi volte che tutte le parti del sistema stesso devono essere differenziate rispetto al tempo per estrarre,attraverso la manipolazione simbolica, un’ ODE (ordinary differential equation) esplicita per tutte leincognite.
34

Cap.2 Dinamica analitica § 2.12 Sistema di equazioni algebrico-differenziali
In questo modo si passa da un sistema algebrico-differenziale di indice differenziale 3 con
vincoli sulle posizioni ad un sistema puramente differenziale di indice differeziale 1 con
vincoli sulle accelerazioni; infatti le equazioni della meccanica per vincoli olonomi sono
riconducibili ad equazioni di indice 3, poiche le equazioni algebriche che le costituisco-
no dipendono solo da incognite differenziali le cui equazioni non contengono le incognite
algebriche stesse.
Le p equazioni cosı trasformate possono essere risolte simultaneamente, insieme alle
altre n equazioni, costruendo il sistema
M ΨTq
Ψq 0
q
λ
=
Fe
γ
(2.95)
nelle incognite {q} e {λ}, ossia accelerazioni e moltiplicatori di Lagrange. Mediante
differenze finite si stimeranno posizioni e velocita all’istante di tempo t+ ∆t:
{q}(t+∆t) ≈ {q}t + {q}t ∆t (2.96)
{q}(t+∆t) ≈ {q}t + {q}t ∆t+1
2{q}t ∆t2 (2.97)
tutto il procedimento verra iterato finche il tempo t non sara minore di un valore fissato. Il
procedimento appena descritto non e molto affidabile, perche conduce ad un rapido accu-
mularsi dell’errore; per questo motivo si dovra cercare di adottare metodi numericamente
piu robusti.
Inoltre, si puo osservare che la matrice
M ΨTq
Ψq 0
(2.98)
e simmetrica, pertanto per la sua inversione ci si puo avvalere di speciali algoritmi, ad
35

Cap.2 Dinamica analitica § 2.12 Sistema di equazioni algebrico-differenziali
esempio delle formule di inversione per matrici partizionate:
M ΨTq
Ψq 0
−1
=
C11 C12
C21 C22
(2.99)
dove si e posto
[C22] =(
[Ψq] [M ]−1 [Ψq]T)−1
(2.100)
[C11] = [M ]−1 − [M ]−1 [Ψq]T [C22] [Ψq] [M ]−1 (2.101)
[C12] = [C21]T = − [M ]−1 [Ψq]T [C22] (2.102)
Mediante l’applicazione di tali formule si perviene al seguente risultato:
{q} = [C11] {Fe}+ [C12] {γ} (2.103)
{λ} = [C21] {Fe}+ [C22] {γ} (2.104)
In ultimo e bene notare che le condizioni iniziali non possono essere arbitrariamente scelte,
ma devono essere congruenti con le equazioni vincolari.
36

Capitolo 3Formulazione dinamica
con il principio di Gauss
Si consideri un punto materiale di massa m, che al tempo t, sottoposta alla forza
{Fx(t), Fy(t), Fz(t)}, occupa la posizione {x(t), y(t), z(t)} in un sistema di riferimento
inerziale. La seconda legge di Newton afferma che, all’istante di tempo t, la forza agente
sulla particella e data dal prodotto della massa per l’accelerazione. Al variare del tempo
la particella descrivera una traiettoria; se si indicano con {x(t), y(t), z(t)} le componenti
dell’accelerazione, il moto della particella sara descritto dalle seguenti tre equazioni scalari:
m · x (t) = Fx (t)
m · y (t) = Fy (t) (3.1)
m · z (t) = Fz (t)
Se si assegnassero la posizione e la velocita iniziale si potrebbe integrare, almeno numeri-
camente, l’equazione (3.1) e ottenere la traiettoria descritta dalla particella.
Si consideri ora il caso piu generale di un sistema costituito da n particelle di masse
m1, ..., mn il cui moto, animato dalle forze impresse {F1x(t), ..., Fnx(t)} ,
37
Cap.3 Formulazione dinamicacon il principio di Gauss
{F1y(t), ..., Fny(t)
}, {F1z(t), ..., Fnz(t)} sia descritto dalle 3n coordinate
{x1(t), ..., xn(t)} , {y1(t), ..., yn(t)} , {z1(t), ..., zn(t)}. Se ogni particella e libera di muo-
versi, indipendentemente dal moto delle altre n-1 particelle, il moto del sistema sara
descritto dalle 3n equazioni:
mi · xi (t) = Fix (t)
mi · yi (t) = Fiy (t) i = 1, 2, , ..., n (3.2)
mi · zi (t) = Fiz (t)
o, in forma piu compatta, adottando la notazione matriciale in cui si considera x(t) =
[x1(t), ..., x3n(t)]T e F (t) = [F1(t), ..., F3n(t)]T :
Mx(t) = F (t) (3.3)
Il caso visto finora, pero, non e il caso piu generale, poiche i sistemi di particelle sono
spesso vincolati: le particelle possono essere vincolate tra loro o vincolate a muoversi
lungo traiettorie particolari; la presenza di vincoli si esprime attraverso l’imposizione di
un dato sistema di m equazioni di vincolo consistenti:
D(x(t), t)x = g(x(t), t) (3.4)
In cui D ha dimensioni m x 3n mentre g e un vettore m x 1. Le condizioni iniziali su
posizione e velocita siano assegnate compatibilmente ai vincoli imposti. Il problema da
risolvere nel moto vincolato sara, allora: dati x(t), x(t), F (t), si determini l’accelerazione
istantanea x(t) in presenza dei vincoli, ovvero come, e di quanto, le accelerazioni del
sistema vincolato deviano da quelle del sistema non vincolato. La presenza del generico
vincolo (3.4) causa l’insorgenza di forze aggiuntive di vincolo che devono essere applicate
38

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.1 Spazio di configurazione
alle particelle; l’equazione che descrive il moto del sistema diventera:
Mx(t) = F (x(t), x(t), t) + F c(t) (3.5)
Si vuole percio determinare il vettore forza di vincolo F c(t).
3.1 Spazio di configurazione
Si consideri un sistema costituito da n punti materiali, ciascuno dotato di una propria
massa mi, i = 1, ..., n. Per indicare univocamente la posizione della generica particella di
massa mi bisognera specificare 3 coordinate xi, yi, zi1. Estendendo questo stesso principio a
tutti gli n punti costituenti il sistema, la configurazione del sistema stesso ad un generico
istante di tempo t sara individuata mediante 3n coordinate, raggruppabili in un unico
vettore x = x1, y1, z1, ..., xn, yn, zn. Ogni vettore descrivera un’unica configurazione del
sistema, ovvero ad esso corrispondera un unico punto nello spazio 3n-dimensionale, detto
spazio di configurazione del sistema.
Il moto del sistema sara descritto dalla seguente equazione:
Mx(t) = F (t) (3.6)
M = diag {m1,m1,m1, ...,mn,mn,mn}
F = [F1x, F1y, F1z, ..., Fnx, Fny, Fnz]
1Sotto l’ipotesi che le coordinate siano prese in un sistema di riferimento ortogonale
39

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
3.2 Vincoli
3.2.1 Vincoli olonomi
Si immagini per semplicita che il sitema meccanico sia costituito da una unica particella
di massa m che si muova lungo l’asse x di un sistema di riferimento inerziale. L’equazione
del moto di tale particella, dette x la posizione della particella stessa ed Fx(x, x, t) la forza
agente sulla particella, sara:
Mx = Fx(x, x, t) (3.7)
In maniera del tutto analoga il moto poteva essere descritto come
mx = Fx(x, x, y, y, z, z, t)
my = Fy(x, x, y, y, z, z, t) (3.8)
mz = Fz(x, x, y, y, z, z, t)
con l’aggiunta dei vincoli
y(t) = 0
z(t) = 0 (3.9)
L’analogia tra queste due scritture si puo facilmente verificare differenziando due volte le
equazioni di vincolo
y(t) = 0
z(t) = 0 (3.10)
40

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
e sostituendo queste espressioni nelle (3.8), ottenendo:
Fy(t) = 0
Fz(t) = 0
mx(t) = Fx(x, x, 0, 0, 0, 0, t) (3.11)
identica alla (3.7). Un vincolo come z(t) = 0 puo essere scritto in generale nella forma:
f(x, y, z, t) = 0 (3.12)
Per un sistema di n particelle si avra:
f(x1, y1, z1, ..., xn, yn, zn, t) = 0 (3.13)
Tale vincolo viene detto olonomo. Se nella sua espressione compare esplicitamente il tempo
si parlera di vincolo reonomo, altrimenti si classifichera come vincolo scleronomo. Per
capire meglio il significato dei vincoli olonomi si consideri un sistema meccanico costituito
da una unica particella, sottoposta ad un vincolo scleronomo della forma
f(x1, y1, z1) = 0 (3.14)
Lo spazio di configurazione della particella e uno spazio tridimensionale, e in tale spazio
il vincolo rappresenta una superficie bidimensionale. La particella, per effetto della pre-
senza del vincolo, non potra muoversi liberamente nello spazio di configurazione, ma sara
costretta a muoversi lungo la superficie bidimensionale individuata dal vincolo olonomo.
Poiche il vincolo e scleronomo, la superficie su cui e vincolata a muoversi la particella sara
invariante nel tempo; se il vincolo fosse stato reonomo la superficie si sarebbe spostata
41

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
e deformata al trascorrere del tempo. Se la particella fosse soggetta a due vincoli indi-
pendenti, il suo moto sarebbe possibile solamente lungo la curva intersezione tra le due
superfici bidimensionali che definiscono i vincoli, mentre se i vincoli fossero tre la parti-
cella sarebbe costretta a rimanere nel punto intersezione tra le tre superfici, punto fisso
(v. scleronomo) o variabile (v. reonomo) nel tempo. In quest’ultimo caso il moto della
particella risulta indipendente dalle forze agenti su di essa, pertanto, affinche il moto della
particella sia dipendente dalle forze agenti su di essa, il numero di vincoli indipendenti
deve essere minore della dimensione dello spazio di configurazione.
Ovviamente quanto detto vale solamente nel caso in cui i vincoli siano consistenti tra
loro, ovvero quando il soddisfacimento di un vincolo non precluda la realizzazione di un
altro vincolo; si sottolinea come la condizione di consistenza sia meno restrittiva di quella
di indipendenza lineare.
Se la funzione f nella (3.13) ha le derivate parziali prime, il suo differenziale totale sara
df =n∑
i=1
∂f
∂xi· dxi +
n∑i=1
∂f
∂yi· dyi +
n∑i=1
∂f
∂zi· dzi +
∂f
∂t· dt = 0 (3.15)
Gli spostamenti infinitesimi dxi, dyi, dzi di un sistema vincolato con vincoli reonomi devono
soddisfare questa equazione; mentre la (3.13) imponeva delle restrizioni sugli spostamenti
finiti, la (3.15), detta forma Pfaffiana dell’equazione di vincolo, da indicazioni sugli spo-
stamenti infinitesimi. Se si deriva la (3.13) rispetto al tempo si ricava la forma equivalente
in cui compaiono le velocita
df
dt=
n∑i=1
∂f
∂xi· xi +
n∑i=1
∂f
∂yi· yi +
n∑i=1
∂f
∂zi· zi +
∂f
∂t= 0 (3.16)
Una qualsiasi 3n-upla {xi, yi, zi} che soddisfi questa relazione e una velocita possibile del
sistema, compatibile con il vincolo imposto. Sebbene nell’espressione del vincolo olonomo
non compaiano espressamente le velocita, comunque la velocita del sistema e soggetta a
42

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
delle restrizioni perche la (3.16) deve essere rispettata, quindi in un sistema soggetto a
vincoli olonomi la velocita del sistema e sempre vincolata.
Riassumendo si puo affermare che per decrivere h vincoli olonomi e necessario intro-
durre il sistema di equazioni
fi(x, t) = 0 i = 1, 2, ..., h (3.17)
Effettuando il differenziale totale della (3.17) si ricava la rappresentazione Pfaffiana di tali
equazioni:
df =3n∑j=1
dij(x, t)dxj + gi(x, t)dt = 0 i = 1, 2, ..., h (3.18)
o, equivalentemente, in termini di velocita possibili
df
dt=
3n∑j=1
dij(x, t)xj + gi(x, t)dt = 0 i = 1, 2, ..., h (3.19)
dij (x, t) =∂fi (x, t)
∂xj
gi (x, t) =∂fi (x, t)
∂t
3.2.2 Vincoli non olonomi
Si definisce non olonomo ogni vincolo che non possa essere messo nella forma (3.13). Un
esempio di vincolo non olonomo e il vincolo che prescrive ad una particella di rimanere
appoggiata sopra una superficie, ad esempio la superficie orizzontale di normale Z :
z(t) ≥ 0 (3.20)
Esiste anche un altro tipo di vincoli non olonomi, che sono espressi da relazioni di ugua-
glianza non integrabili nel tempo, come ad esempio il sistema
43

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
3n∑j=1
dij(x, t)dxj + gi(x, t)dt = 0 i = 1, 2, ..., r (3.21)
Anche per i vincoli non olonomi si puo adottare la classificazione in v. reonomi e sclero-
nomi.
Questo tipo di vincoli impone delle restrizioni agli spostamenti infinitesimi del siste-
ma, ma la non integrabilita dei vincoli fa sı che sia impossibile trovare le corrispondenti
restrizioni agli spostamenti finiti del sistema. Pur non essendo integrabili, i vincoli non
olonomi, come i vincoli olonomi, sono derivabili, a patto che le funzioni dij(x, t) e gi(x, t)
siano sufficientemente regolari; se si derivano le (3.21) e le (3.18) si ottiene un sistema di
m = h+ r equazioni
3n∑j=1
dij(x, t)xj +3n∑j=1
3n∑k=1
dij(x, t)xkxj +3n∑j=1
∂dij(x, t)
∂txj+
+3n∑k=1
∂gi(x, t)
∂txk +
∂gi(x, t)
∂t= 0 i = 1, 2, ..., m (3.22)
o analogamente, nella forma matriciale,
A(x, t) · x = b(x, x, t) (3.23)
in cui il generico elemento (i, j) della matrice A e dij(x, t) , mentre l’i-esimo elemento del
vettore riga b e dato da:
b(x, x, t) = −3n∑j=1
3n∑k=1
dij(x, t)xkxj −3n∑j=1
∂dij(x, t)
∂txj −
3n∑k=1
∂gi(x, t)
∂txk −
∂gi(x, t)
∂t(3.24)
Il numero di gradi di liberta del sistema sara definito come il numero minimo di coordinate
neccessarie a descrivere la configurazione del sistema, diminuito del numero di vincoli
indipendenti. Detto k il numero di equazioni del sistema (3.23) linearmente indipendenti,
44
Cap.3 Formulazione dinamicacon il principio di Gauss § 3.2 Vincoli
il sistema potra essere risolto assegnando 3n-k componenti del vettore x, e risolvendo il
sistema nelle rimanenti k componenti incognite di x.
Si vuole ora approfondire il significato della imposizione di un vincolo non-olonomo;
per farlo si consideri il caso semplice in cui il sistema sia costituito da un’unica particella,
soggetta al seguente vincolo:
dy = z · dx (3.25)
Questo vincolo impone una limitazione agli spostamenti infinitesimi della particella. L’e-
quazione (3.25) non puo essere integrata, dal momento che non esiste nessun fattore inte-
grante; si vuole comunque capire come tale vincolo limiti lo spazio di configurazione della
particella, e quindi se esiste una traiettoria dello spazio di configurazione che conduca la
particella per esempio dall’origine ad un qualsiasi altro punto dello spazio di configura-
zione, rimanendo comunque valido il vincolo. In effetti un vincolo di uguaglianza non-
olonomo non fissa delle restrizioni alle traiettorie possibili della particella; per dimostrarlo
si consideri la seguente traiettoria:
y = f(x)
z = f ′(x)
(3.26)
Questa traiettoria soddisfa il vincolo nonche le condizioni iniziale e finale; inoltre esistono
infinite altre funzioni che soddisfano il vincolo e non limitano la traiettoria della particella.
In definitiva si puo dimostrare che un vincolo di uguaglianza Pfaffiano non integrabile
non limita la dimensione della zona dello spazio di configurazione accessibile alla particella,
a differenza dei vincoli olonomi.
Riassumendo si puo affermare che:
� le equazioni di vincolo applicate al sistema devono essere consistenti tra loro, ma
non necessariamente linearmente indipendenti;
45
Cap.3 Formulazione dinamicacon il principio di Gauss § 3.3 Principio di Gauss
� differenziando i vincoli non-olonomi una volta rispetto al tempo ed i vincoli olonomi
due volte rispetto al tempo si possono mettere le equazioni di vincolo in un unico
sistema lineare nelle accelerazioni;
� per quanto riguarda l’equazione fondamentale di Gauss non c’e differenza tra vincoli
olonomi e vincoli di uguaglianza non-olonomi Pfaffiani; la stessa cosa vale per i
vincoli scleronomi e reonomi. Si e comunque voluto fornire la definizione dei vari
tipi di vincoli sia per comprendere le differenze qualitative tra i vincoli sia perche in
letteratura la distinzione tra vincoli olonomi e non-olonomi e sempre riportata.
3.3 Principio di Gauss
Si consideri un sistema di n particelle di masse mi, i = 1, ..., n. La posizione della
i -esima particella sara nota una volta stabilite le coordinate [xi, yi, zi]. Se sulla particella
agisce la forza Fi(t), in assenza di vincoli la sua accelerazione sara ai(t) = Fi(t)mi
. Si assuma,
inoltre, che le particelle siano vincolate tramite delle interconnessioni, espresse ad esempio
con il fatto che debbano stare su qualche superficie dello spazio di configurazione o che
debbano soddisfare qualche vincolo Pfaffiano. L’obiettivo che ci si pone e di determinare
le accelerazioni effettive delle particelle ad ogni istante di tempo, come risultato delle forze
impresse e dei vincoli, a patto di conoscere posizioni e velocita al tempo t. Se non ci fossero
vincoli, l’equazione del moto sarebbe:
Ma(t) = F (x(t), x(t), t) (3.27)
Dove il 3n vettore F e definito forza esterna impressa al sistema.
In presenza di vincoli l’accelerazione del sistema di particelle differira da a(t); indicato
con x(t) il vettore accelerazione, e noti al tempo t sia il vettore posizione x che il vettore
46

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.3 Principio di Gauss
velocita x, e quindi anche il vettore della forza impressa, compatibili con i vincoli assegnati,
il principio di Gauss [29] afferma che:
Di tutte le accelerazioni, compatibili con i vincoli, che il sistema puo avere all’istante
di tempo t, l’unica che effettivamente ha luogo e quella che rende minima la quantita
G(x) = (x− a)T M (x− a) = (xn − an)T (xn − an) (3.28)
dove si sono indicate con il pedice N le accelerazioni normalizzate
xN = M1/2x aN = M1/2a (3.29)
La funzione scalare G e definita Gaussiana del sistema. La quantita ∆x = x − a e
la deviazione dell’accelerazione del sistema vincolato da quella che il sitema avrebbe in
assenza di vincoli, quindi la gaussiana puo essere vista come il quadrato della lunghezza
normalizzata del vettore ∆x, rispetto alla matrice M.
Da qui in avanti si considereranno solamente i vincoli esprimibili con relazioni di ugua-
glianza tra le accelerazioni, che possono cioe essere messi mella forma (3.23); i vincoli del
tipo (3.20) non verranno presi in considerazione. In questo modo i vincoli che saranno trat-
tati troveranno posto nella Meccanica Lagrangiana; inoltre i vincoli saranno considerati tra
loro consistenti, ma non necessariamente descritti da equazioni linearmente indipendenti.
Da ultimo si definira matrice dei vincoli la matrice AM− 12 , e d’ora in poi la si indichera
sinteticamente con la lettera B.
47

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.4 Operativita del principio di Gauss
3.4 Operativita del principio di Gauss
Ad ogni istante di tempo t il 3n-vettore che rappresenta l’accelerazione di un sistema di n
particelle, in presenza di vincoli espressi dalla (3.23) e dato da
x = a+M− 12
(AM− 1
2
)+
(b− Aa) (3.30)
ovvero
x = a+M− 12B+(b− Aa) (3.31)
in cui B+ =(AM− 1
2
)+2 e l’unica inversa della matrice dei vincoli B.
Si dimostrera ora tale affermazione; dapprima si dimostra che l’accelerazione ottenuta con
la (3.30) soddisfa l’equazione dei vincoli (3.23), ovvero minimizza la Gaussiana G ; sotto
tali condizioni, infatti, il principio di Gauss affermerebbe che l’accelerazione contenuta
nella (3.30) e proprio l’accelerazione che caratterizza i punti del sistema vincolato.
L’equazione (3.23), considerando che M12M− 1
2 = I, puo essere messa nella forma
AM− 12
(M
12 x)
= AM− 12 (xN) = b (3.32)
ovvero
BxN = b (3.33)
Affinche la (3.32) sia congruente, ovvero x sia soluzione, deve essere necessariamente
2Con la notazioneB+ si e indicata la MP-inversa della matrice B. Per approfondimenti sulla MP-inversasi puo fare riferimento all’appendice.
Inoltre, se X e una matrice definita positiva, si puo definire la X12 come
X12 = WΛ
12WT ;
X− 12 = WΛ− 1
2WT ;
48

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.4 Operativita del principio di Gauss
verificata la condizione di congruenza3
AM− 12
(AM− 1
2
)+
b = b (3.34)
Sostituendo ora l’espressione per x fornita dalla (3.30) nell’equazione appena scritta si ha
Ax = Aa+ AM− 12
(AM− 1
2
)+
(b− Aa) =
[I − AM− 1
2
(AM− 1
2
)+]Aa+ AM− 1
2
(AM− 1
2
)+
b =
[I − AM− 1
2
(AM− 1
2
)+](
AM− 12
)M
12a+ AM− 1
2
(AM− 1
2
)+
b = (3.35)
[(AM− 1
2
)− AM− 1
2
(AM− 1
2
)+ (AM− 1
2
)]M
12a+ AM− 1
2
(AM− 1
2
)+
b =
[AM− 1
2 − AM− 12
]M
12a+ AM− 1
2
(AM− 1
2
)+
b = b
L’accelerazione definita dalla (3.30) soddisfa l’equazione dei vincoli (3.23).
Resta ora da dimostrare che tale accelerazione e anche quella che minimizza la Gaus-
siana G. Per farlo si ipotizzi che esista un vettore u, diverso da x, che soddisfa l’equazione
(3.23) e che differisce da x di una quantita v, ovvero u = x+ v. Si dovra dimostrare che,
per ogni v 6= 0, necessariamente G(u) > G(x). Poiche per ipotesi u soddisfa l’equazione
(3.23), sara sempre verificata l’equazione
Au = b (3.36)
ovvero
A (x+ v) = Ax+ Av = b (3.37)
Si sa altresı che Ax = b, quindi necessariamente Av = 0. Questa uguaglianza puo anche
3Un sistema Ax = b e congruente ⇔AAGb = b, dove AGe una delle G-inverse di A, ovvero AAGA = A
49

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.4 Operativita del principio di Gauss
essere espressa come:
(M
12v)T (
AM− 12
)+
= 0 (3.38)
Se si scrive ora l’espressione della Gaussiana per u si ottiene:
G(u) =
[(AM− 1
2
)+
(b− Aa) +M12v
]T [(AM− 1
2
)+
(b− Aa) +M12v
]=
=
[(AM− 1
2
)+
(b− Aa)
]T [(AM− 1
2
)+
(b− Aa)
]+
[(AM− 1
2
)+
(b− Aa)
]TM
12v+
(M
12v)T [(
AM− 12
)+
(b− Aa)
]+(M
12v)T (
M12v)
(3.39)
Il primo termine del secondo membro e G(x), il secondo ed il terzo termine sono nulli per
la (3.38); semplificando si ottiene:
G(u) = G(x) +(M
12v)T (
M12v)
(3.40)
Poiche la matrice delle masse e definita positiva, il secondo termine a secondo membro e
sempre non negativo, ed e uguale a zero solamente nel caso in cui v = 0. Come conseguenza
G(u) ≥ G(x), cio vuol dire che la Gaussiana di u ha un minimo per u = x.
Si osservi infine che nel caso particolare in cui la matrice delle masse sia diagonale con
tutte le masse uguali si ha
M− 12
(AM− 1
2
)+
= m−12 I(m−
12AI
)+
= A+ (3.41)
e l’equazione fondamentale (3.30) si semplifica nel modo seguente:
x = a+ A+(b− Aa) (3.42)
50

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.5 La reazione dei vincoli
Questa semplice forma per l’equazione del moto di un sistema vincolato si puo ottenere
anche nel caso in cui le particelle che costituiscono il sistema meccanico abbiano masse
diverse tra loro, scalando i vettori accelerazione di un’opportuna quantita.
3.5 La reazione dei vincoli
Si e visto come la presenza dei vincoli costringa l’accelerazione del sistema a deviare da
quella che si avrebbe se non ci fossero i vincoli; tale deviazione nell’accelerazione e determi-
nata da una forza esercitata sul sistema in virtu del fatto che il sistema non vincolato deve
ora soddisfare anche i vincoli. Le equazioni del moto del sistema non vincolato saranno
date dalla:
Ma = F (t) (3.43)
in cui F e il vettore delle forze esterne impresse sul sistema. Le equazioni del moto del
sistema vincolato, invece, saranno date da:
Mx = Ma+M− 12
(AM− 1
2
)+
(b− Aa) (3.44)
o, sostituendo la (3.43) nella (3.44)
Mx = F (t) +M− 12
(AM− 1
2
)+
(b− Aa) = F (t) + F c(t) (3.45)
Pertanto, ad ogni istante di tempo, il sistema vincolato e sottoposto ad una forza di vincolo
aggiuntiva F c(t); questa forza costringe l’accelerazione del sistema al tempo t a passare
dal valore non vincolato a(t) al valore vincolato x(t).
51

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.6 Un ulteriore esame dell’equazione fondamentale
3.6 Un ulteriore esame dell’equazione fondamentale
Si vuole approfondire la portata dell’equazione fondamentale (3.30); innanzitutto si osservi
come nell’equazione si fa uso della MP-inversa che, com’e noto, e unica. Questo vuol dire
che, dati i vettori a e b, nonche le matrici M ed A, il secondo membro e univocamente
determinato, il che implica che le accelerazioni del sistema vincolato hanno un unico valore,
in accordo con il comune senso fisico. Inoltre, dalle proprieta della MP-inversa, vale
l’uguaglianza4:
X+ = XT(XXT
)+(3.46)
Sfruttando questa uguaglianza ed il fatto che la matrice M− 12 e simmetrica l’equazione
fondamentale puo essere riscritta nella forma
x = a+M−1AT(AM−1AT
)+ (b− AM−1a
)(3.47)
Premoltiplicando ambo i membri per M scompare la M− 12 dall’equazione fondamentale:
Mx = F + AT(AM−1AT
)+ (b− AM−1F
)(3.48)
Nel caso particolare in cui la matrice A, di dimensioni mxn, ha rango pieno (ovvero le
equazioni di vincolo sono mutuamente indipendenti), considerato che M e definita positiva,
il rango della matrice mxm AM−1AT sara pieno e la matrice sara non singolare; si potra
sostituire la MP-inversa con l’inversa e l’equazione fondamentale si riscrivera come:
x = a+M−1AT(AM−1AT
)−1 (b− AM−1a
)(3.49)
4XT(XXT
)+= XT
(W ∧ V TV ∧WT
)+= XT
(W ∧2 WT
)+= V ∧WTW ∧−2 WT = V ∧−1 WT =
X+
52
Cap.3 Formulazione dinamicacon il principio di Gauss § 3.7 Equazione fondamentale e meccanica Lagrangiana
3.7 Equazione fondamentale e meccanica Lagrangia-
na
Si consideri un sistema di n particelle non vincolate; detti M la matrice diagonale delle
masse, a il vettore accelerazione e F il vettore delle forze impresse, il moto del sistema
sara descritto dalla relazione:
Ma (t) = F (t) (3.50)
Come si e visto, in presenza di vincoli le accelerazioni delle particelle differiranno da a, e
verranno indicate con x. Esprimendo i vincoli con le m equazioni
ϕi (x, x, t) = 0 i = 1, ..., m (3.51)
e differenziando tali equazioni rispetto al tempo si ottiene
A (x, t) x = b (x, x, t) (3.52)
dove la matrice A mxn e l’m-vettore b sono funzioni note di x, x, t; affinche l’accelerazione
del sistema vincolato sia compatibile con i vincoli, dovra rispettare l’equazione precedente.
Si applichi ora la sostituzione
r (t) = M12 x (t) (3.53)
nell’equazione di vincolo (3.52):
AM− 12 r = Br = b (3.54)
e noto che la soluzione generale dell’equazione appena scritta e
r = B+b+(I −B+B
)y = B+b+Ry (3.55)
53

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.7 Equazione fondamentale e meccanica Lagrangiana
in cui y e un arbitrario n-vettore. Se si assume che, all’istante di tempo t, siano note
posizioni e velocita, allora la matrice A ed il vettore b, funzioni delle posizioni e delle
velocita, saranno univocamente determinati; il primo termine alla destra dell’uguale sara
pertanto noto, e per ottenere l’accelerazione del sistema occorrera solamente determinare
il termine Ry. La determinazione di questo termine e dettata dai principi della meccanica,
ovvero dal principio di Gauss; secondo questo principio l’accelerazione del sistema vincolato
ad ogni istante di tempo deve minimizzare la Gaussiana
G(x) = (x− a)T M (x− a) =(M
12 x−M
12a)T
(M12 x−M
12a) =
(r −M
12a)T
(r −M12a)
(3.56)
Sostituendo la (3.55) nell’espressione della Gaussiana e necessario trovare il vettore y che
minimizzi la funzione
G(y) =[Ry −
(M
12a−B+b
)]T [Ry −
(M
12a−B+b
)](3.57)
Ora il vettore y che minimizza questa funzione e dato da
y = R+(M
12a−B+b
)+(I −R+R
)z (3.58)
in cui z e un n-vettore arbitrario. Ricordando ora la definizione di R, risulta R+ = R;
inoltre R e idempotente, e quindi RR = R. Applicando queste relazioni si ottiene:
y = R+(M
12a−B+b
)+ (I −R) z (3.59)
Premoltiplicando per R si ricava
Ry = RR+(M
12a−B+b
)+R (I −R) z =
54

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.7 Equazione fondamentale e meccanica Lagrangiana
= RR+(M
12a−B+b
)+ (R−RR) z = (3.60)
= R(M
12a−B+b
)Si e ricavata l’espressione di Ry ; sostituendola nella (3.55) si ha
r = B+b+R(M
12a−B+b
)= B+b+
(I −B+B
) (M
12a−B+b
)=
= M12a+B+BB+b−B+BM
12a = M
12a+B+b−B+BM
12a = (3.61)
M12a+B+
(b−BM
12a)
= M12a+
(AM− 1
2
)+
(b− Aa)
Premoltiplicando ambo i membri per M12 si perviene infine all’espressione dell’accelerazio-
ne del sistema vincolato:
x = a+M− 12
(AM− 1
2
)+
(b− Aa) (3.62)
che e l’equazione fondamentale.
Si vuole ora stabilire il legame tra principio di Gauss e meccanica Lagrangiana. Per
farlo si osservi che l’accelerazione del sistema vincolato si puo esprimere come:
x(t) = M− 12B+b+M− 1
2Ry =
= M− 12B+b+M− 1
2R(M
12a−B+b
)= (3.63)
M− 12B+b+
(a−M− 1
2B+b)
L’accelerazione totale puo essere quindi vista come somma di due vettori: il primo e
determinato dall’imposizione sul sistema dei vincoli, mentre il secondo e presente perche
l’accelerazione deve soddisfare il principio di Gauss, cioe e determinato dai principi della
Meccanica. Premoltiplicando ambo i membri dell’equazione (3.62) per la matrice delle
55

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.7 Equazione fondamentale e meccanica Lagrangiana
masse si ottiene:
Mx (t) = Ma+M12
(AM− 1
2
)+
(b− Aa) =
= F (t) + F c (t) (3.64)
in cui
F c (t) = M12
(AM− 1
2
)+
(b− Aa) (3.65)
Il vettore F (t) rappresenta le forze impresse sul sistema, mentre il vettore F c (t) esprime
le forze che devono essere applicate affinche i vincoli siano rispettati. Ora il prodotto(AM− 1
2
)+
(b− Aa) puo sempre essere espresso come(AM− 1
2
)+
λ, con λ un m-vettore.
λ e detto moltiplicatore di Lagrange, poiche Lagrange fu il primo ad utilizzarlo nella
descrizione del moto di sistemi vincolati. Con l’introduzione di questo vettore ad ogni
istante di tempo t la forza di vincolo puo essere espressa come
F c (t) = M12
(AM− 1
2
)+
(b− Aa) = M12
(AM− 1
2
)+
λ = ATλ (3.66)
e l’equazione che regola il moto del sistema vincolato si riscrivera come
Mx (t) = F (t) + ATλ (3.67)
Questo risultato e valido anche quando le equazioni di vincolo non sono indipendenti, e
quindi il rango di A e minore di m.
Attraverso l’equazione fondamentale si e provata l’esistenza di un m-vettore λ che,
moltiplicato per la matrice AT , da luogo alla forza di vincolo F c (t). L’equazione (3.67),
sulla quale si basa la meccanica Lagrangiana, non e altro che un risultato dell’equazio-
ne fondamentale. Resta cosı dimostrata la conformita dell’equazione fondamentale alla
meccanica Lagrangiana.
56

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.8 La formulazione di Udwadia-Kalaba
3.8 La formulazione di Udwadia-Kalaba
Nel precedente paragrafo si e ottenuta la seguente uguaglianza per l’inversa della matrice
dei coefficienti: M ΨTq
Ψq 0
−1
=
M−1 −M−1ΨTq
(ΨqM
−1ΨTq
)−1ΨqM
−1 −M−1ΨTq
(ΨqM
−1ΨTq
)−1
−(ΨqM
−1ΨTq
)−1ΨqM
−1(ΨqM
−1ΨTq
)−1
(3.68)
Tale espressione e valida solamente sotto l’ipotesi che la matrice dei coefficienti abbia
tutte le righe indipendenti, ovvero solo se la matrice Jacobiana [Ψq] ha rango pieno; la
formulazione di Udwadia-Kalaba [47] nasce per calcolare le accelerazioni anche nel caso in
cui tale ipotesi non sia verificata; per dedurla indicato con
{qf} = [M ]−1 {Fe} (3.69)
il vettore delle accelerazioni che si avrebbero in assenza di vincoli, si ottengono per le
accelerazioni e per i moltiplicatori di Lagrange le seguenti espressioni:
{q} = {qf}+ [M ]−1 [Ψq]T(
[Ψq] [M ]−1 [Ψq]T)−1
({γ} − [Ψq] {qf}) (3.70)
{λ} =(
[Ψq] [M ]−1 [Ψq]T)−1
({γ} − [Ψq] {qf}) (3.71)
Indicando ora con
[M ]−1 = [M ]−12 [M ]−
12 (3.72)
[D] = [Ψq] [M ]−12 (3.73)
57

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.8 La formulazione di Udwadia-Kalaba
e ricordando la definizione di matrice pseudoinversa sinistra
[D]+ = [D]T(
[D] [D]T)−1
(3.74)
la (3.70) si puo riscrivere come:
{q} = {qf}+ [M ]−12
([M ]−
12 [Ψq]
T)(
[Ψq] [M ]−12 [M ]−
12 [Ψq]
T)−1
({γ} − [Ψq] {qf}) =
= {qf}+ [M ]−12 [D]T
([D] [D]T
)−1
({γ} − [Ψq] {qf}) =
= {qf}+ [M ]−12 [D]+ ({γ} − [Ψq] {qf}) (3.75)
La (3.75), che esprime la formulazione di Udwadia-Kalaba, ha notevoli vantaggi:
� puo applicarsi anche nel caso in cui i vincoli siano sovrabbondanti o nel caso in cui
la matrice Jacobiana [Ψq] non abbia rango pieno;
� permette di avvalersi dell’uso di solutori di ODE ottenendo simultaneamente tutte
le variabili del sistema, pur non impiegando un numero minimo di coordinate;
� richiede che i vincoli siano congruenti tra loro, ma non necessariamente indipendenti.
Da queste considerazioni appare evidente come tale formulazione sia ideale nel caso in cui
si vogliano ricavare i parametri di moto di un sistema meccanico per via numerica.
Da ultimo e bene osservare che in questa trattazione si e implicitamente supposto che
la matrice delle masse sia diagonale, ipotesi sempre valida in caso di moto rigido piano, in
cui la matrice associata alla massa del generico i-esimo corpo assume la forma
[Mi] =
mi 0 0
0 mi 0
0 0 Ii
(3.76)
58

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.9 Formulazione stabilizzata di Baumgarte
In caso di moto rigido spaziale, in cui la la matrice associata alla massa del generico i -esimo
corpo assume la forma
[Mi] =
miIi 0 0
0 miIi 0
0 0 Ji
(3.77)
tale ipotesi e valida solamente nel caso in cui la matrice dei momenti d’inerzia [Ji] sia
diagonale, ovvero solamente se tale matrice e valutata rispetto ad assi principali d’inerzia.
3.9 Formulazione stabilizzata di Baumgarte
Come visto in precedenza, per effettuare l’analisi dinamica di un sistema meccanico occorre
risolvere al tempo t = t il sistema
M ΨTq
Ψq 0
q
λ
=
Fe
γ
(3.78)
rispetto alle variabili incongnite q e λ. Le velocita e le posizioni al tempo t si ricavano
poi per differenze finite; putroppo questo modo di procedere puo portare ad un rapido
accumularsi dell’errore, e comunque puo dare luogo a violazioni delle equazioni vincolari
Ψ = 0.
A Baumgarte [7, 8] si deve lo sviluppo di una formulazione che permette di tenere sotto
controllo possibili violazioni delle equazioni vincolari. Per illustrare tale formulazione si
cominci sottolineando che le equazioni vincolari che devono essere rispettate, ad ogni
istante di tempo, sono le seguenti
Ψ ≡ Ψ (q, t) = 0 (3.79)
Ψ ≡ [Ψq] {q}+ {Ψt} = 0 (3.80)
59

Cap.3 Formulazione dinamicacon il principio di Gauss § 3.9 Formulazione stabilizzata di Baumgarte
Ψ ≡ [Ψq] {q} − {γ} = 0 (3.81)
nelle incognite, rispettivamente, q, q e q. Per smorzare le violazioni delle equazioni vin-
colari che si verificano durante il processo di integrazione numerica, Baumgarte propose
di inserire tali violazioni proprio nelle equazioni vincolari, in particolare di aggiungere alle
(3.81) le equazioni
Ψ + 2αΨ + β2Ψ = 0 (3.82)
con α e β funzioni peso, sempre positive, scelte arbitrariamente dall’utente. Con l’aggiunta
di queste equazioni il sistema si trasforma nel:
M ΨTq
Ψq 0
q
λ
=
Fe
γ − 2αΨ− β2Ψ
(3.83)
Per quanto attiene alla scelta delle funzioni α e β tipicamente si fissano costanti e pari
all’inverso del passo di integrazione; per conoscere strategie piu complesse si puo consultare
il lavoro di Nikravesh [15]; comunque risulta evidente come la scelta di α e β debba essere
fatta con attenzione, verificandola mediante analisi dei risultati.
Utilizzando questa formulazione le accelerazioni possono essere computate mediante le
equazioni:
{q} = {qf}+ [M ]−1 [Ψq]T(
[Ψq] [M ]−1 [Ψq]T)−1 (
{γ} − 2α{
Ψ}− β2 {Ψ} − [Ψq] {qf}
)(3.84)
I moltiplicatori di Lagrange, invece, devono essere calcolati risolvendo il sistema di par-
tenza, poiche quelli calcolati in seguito all’introduzione della stabilizzazione potrebbero
essere moto diversi da quelli originari.
60
Capitolo 4Analisi della struttura cinematica
4.1 Definizioni
Di seguito vengono riportate alcune definizioni utili ai fini della comprensione degli argo-
menti trattati. Tutta la terminologia verra riferta ai corpi rigidi, quindi corpi indeformabili
in grado di muoversi nello spazio.
Si definisce membro cinematico un singolo corpo, o un insieme di corpi tra loro collegati
in modo tale che sia inibito il moto relativo tra di essi.
Per ottenere l’instaurarsi di un moto relativo tra due membri e necessaria la presenza di
un elemento cinematico, che non e altro che la zona del corpo rigido sagomata in modo
tale da consentire il collegamento e il moto relativo con un altro corpo.
Per coppia cinematica si intende l’insieme di due elementi cinematici che consentono il
collegamento tra due membri. A Releaux si deve la classificazione delle coppie cinemati-
che in coppie cinematiche inferiori, caratterizzate da contatti superficiali in corrispondenza
degli elementi cinematici (coppia prismatica, rotoidale, elicoidale, sferica...) e coppie cine-
matiche superiori, caratterizzate, in corrispondenza degli elementi cinematici, da contatti
lineari e puntiformi (denti con profili coniugati...). Ad ogni coppia si puo associare un
grado di liberta della coppia, indicato con fi, che consiste nel numero di moti relativi in-
61

Cap.4 Analisi della struttura cinematica § 4.1 Definizioni
dipendenti che sono possibili tra gli elementi collegati dalla coppia. Il numero di moti che
vengono soppressi nel moto relativo tra i due corpi che costituiscono la coppia cinematica
e detto grado di vincolo, g.d.v.
Un’altra definizione fondamentale nell’analisi della struttura cinematica e quella che
consente di distinguere tra catena cinematica e meccanismo:
� La catena cinematica e un insieme di membri ciascuno dei quali sia collegato, attra-
verso elementi cinematici, almeno ad un membro dello stesso insieme;
� Il meccanismo e una catena cinematica nella quale un membro, detto telaio, e stato
reso fisso.
Grado di liberta di un sistema meccanico e il minimo numero di coordinate indipendenti
necessarie per descrivere la configurazione del sistema.
Esistono vari metodi per calcolare il numero di gradi di liberta di un sistema. I piu semplici
sono sicuramente i metodi topologici, seguendo i quali il numero di gradi di liberta F si
calcola come:
F = (g.d.l. dei membri svincolati)− (g.d.v. dei membri, introdotti dalle coppie) (4.1)
Indicato con l il numero di membri, con j il numero di coppie cinematiche e con λ il
parametro di mobilita (pari a 6 per sistemi animati da moto spaziale e pari a 3 per sistemi
in moto piano), il numero di g.d.l. secondo Kutzbach e dato da:
F = λ(l − 1)−j∑
i=1
(λ− fi) = λ(l − j − 1) +
j∑i=1
fi (4.2)
La formula di Kutzbach e solo un esempio di metodo topologico; e importante ricordare
pero che i criteri topologici non sempre permettono di calcolare esattamente il numero
di gradi di liberta. Infatti in questi criteri il numero di g.d.l e funzione solamente della
62

Cap.4 Analisi della struttura cinematica § 4.1 Definizioni
struttura cinematica, mentre il numero di g.d.l. e influenzato anche da altri parametri,
quali la configurazione del sistema, la geometria dei membri, etc.
Per calcolare in maniera corretta F occorre ricorrere a dei metodi analitici; si cita il
metodo matriciale dovuto a Whittaker, secondo il quale i g.d.l. di un sistema, detto n il
numero di coordinate usate per definire la configurazione del sistema e p il numero delle
relazioni indipendenti che si possono stabilire tra le variazioni infinitesime delle coordinate,
sono dati da:
F = n− p (4.3)
La trattazione che segue non vuole avere nessuna pretesa di esaustivita. Per ulteriori
approfondimenti si rimanda ai testi di meccanica, ad esempio [16].
Per effettuare l’analisi cinematica si e scelto di applicare il metodo delle equazioni di
vincolo. La scelta e ricaduta su questo metodo perche, nonostante il gran numero di
equazioni e di variabili che coinvolge, ha il vantaggio di essere facilmente implementabile
in un’ottica di lavoro multibody. Nel seguito verranno considerati sistemi in cui i membri
sono animati da moto piano.
I vincoli che caratterizzano meccanismi articolati possono essere dei seguenti tipi:
� vincoli scleronomi (indipendenti dal tempo), dovuti alla presenza delle coppie cine-
matiche;
� vincoli reonomi (dipendenti esplicitamente dal tempo), dovuti a delle leggi di moto
assegnate ai membri.
Le equazioni relative ai vincoli reonomi devono essere inserite direttamente, mentre le
equazioni relative agli altri vincoli possono essere generate automaticamente una volta
stabilita la topologia del sistema e la geometria dei membri.
Da qui in avanti verra utilizzato un sistema di coordinate generalizzate: ad ogni membro
63

Cap.4 Analisi della struttura cinematica § 4.1 Definizioni
mobile verra associato un sistema di riferimento cartesiano oi − xiyi.
La posizione del membro i-esimo, rispetto ad un riferimento inerziale O−XY , sara definita
una volta specificate le tre coordinate generalizzate q3i−2, q3i−1, q3i, in cui le prime due
coordinate specificano la posizione dell’origine del s.d.r. mobile, mentre la terza indica
l’angolo esistente tra gli assi delle ascisse dei due s.d.r., misurato a partire da X in senso
antiorario. Nella figura seguente viene mostrata la convenzione utilizzata:
Figura 4.1: Nomenclatura
a
b
c
d
e
f
g
h
l
Y
q3i-1
q3i
q3i-2
xi
yi
Oi
X
corpo i
Posto
[oiA] =
cos q3i −sin q3i
sin q3i cos q3i
(4.4)
la trasformazione che permette di ottenere le coordinate assolute (X, Y ) di un generico
punto a partire dalla conoscenza delle coordinate nel riferimento locale(x, y) e la seguente:
X
Y
= [oiA]
x
y
+
q3i−2
q3i−1
(4.5)
Si ricavano nel seguito le equazioni di vincolo per coppie rotoidali e prismatiche, unici
vincoli scleronomi previsti dal modello sviluppato; entrambe queste coppie hanno un grado
di liberta, e pertanto nel caso di moto piano introdurranno due gradi di vincolo.
64

Cap.4 Analisi della struttura cinematica § 4.2 Coppia rotoidale
4.2 Coppia rotoidale
Nel caso di coppia rotoidale tra i membri i e j le equazioni da introdurre traducono la
condizione di coincidenza tra i punti Ai e Aj:
Ψk ≡ XAi−XAj
= 0 (4.6)
Ψk+1 ≡ YAi− YAj
= 0 (4.7)
Figura 4.2: Coppia rotoidale
a
b
c d
e
f
g
h
i
r
s
u
v
q3i-1
q3j-1
q3i-2
q3j-2
yAi
xAi y
Aj
xAj
oi
oj
Ai=A
j
X
Y
Ricordando la 4.5, le equazioni vincolari si trasformano in:
Ψk ≡ (q3i−2 + xAicos q3i − yAisin q3i)−
(q3j−2 + xAj
cos q3j − yAjsin q3j
)= 0 (4.8)
Ψk+1 ≡ (q3i−1 + xAisin q3i + yAicos q3i)−
(q3j−1 + xAj
sin q3j + yAjcos q3j
)= 0 (4.9)
65

Cap.4 Analisi della struttura cinematica § 4.2 Coppia rotoidale
Per effettuare l’analisi cinematica e indispensabile ricavare gli elementi della matrice Ja-
cobiana [Ψq] e del vettore γ, pertanto nel seguito si ricaveranno tali elementi dovuti alla
presenza della coppia rotoidale:
∂Ψk
∂q3i−2
= 1 (4.10)
∂Ψk
∂q3i−1
= 0 (4.11)
∂Ψk
∂q3i
= − (xAisin q3i + yAi
cos q3i) = q3i−1 − YAi(4.12)
∂Ψk
∂q3j−2
= −1 (4.13)
∂Ψk
∂q3j−1
= 0 (4.14)
∂Ψk
∂q3j
= xAjsin q3j + yAj
cos q3j = YAj− q3j−1 (4.15)
∂Ψk+1
∂q3i−2
= 0 (4.16)
∂Ψk+1
∂q3i−1
= 1 (4.17)
∂Ψk+1
∂q3i
= xAicos q3i − yAi
sin q3i = XAi− q3i−2 (4.18)
66

Cap.4 Analisi della struttura cinematica § 4.3 Coppia prismatica
∂Ψk+1
∂q3j−2
= 0 (4.19)
∂Ψk+1
∂q3j−1
= −1 (4.20)
∂Ψk+1
∂q3j
= −xAjcos q3j + yAj
sin q3j = q3j−2 −XAj(4.21)
γ (k) = −[q2
3i (q3i−2 −XAi)− q2
3j
(q3j−2 −XAj
)](4.22)
γ (k + 1) = −[q2
3i (q3i−1 − YAi)− q2
3j
(q3j−1 − YAj
)](4.23)
4.3 Coppia prismatica
Per coppie prismatiche, invece, le condizioni da imporre sono:
1. I punti Ai e Bi del corpo i devono essere allineati con il punto Cj del corpo j lungo
l’asse della coppia;
2. La differenza ∆ϕij tra le coordinate q3i e q3j deve essere costante, poiche la presenza
della coppia prismatica non permette la rotazione relativa tra i corpi.
67
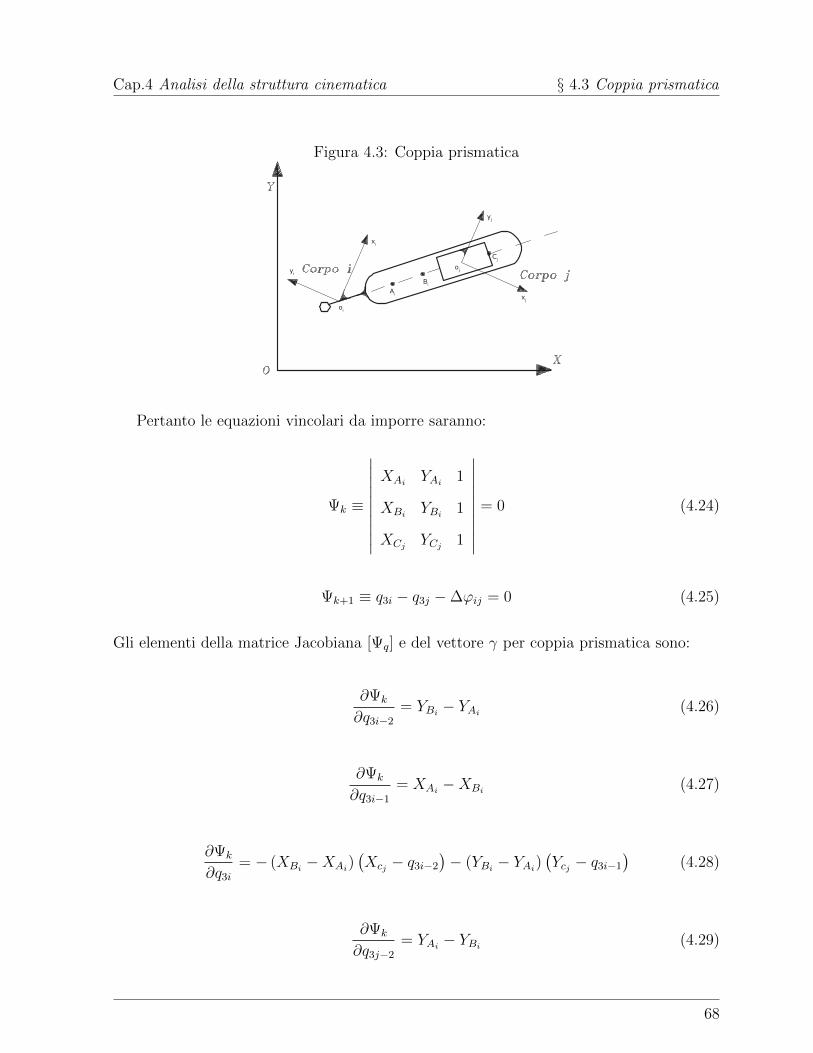
Cap.4 Analisi della struttura cinematica § 4.3 Coppia prismatica
Figura 4.3: Coppia prismatica
Bib
Ai
Cj
xi
yi
xj
yj
oi
oj
Pertanto le equazioni vincolari da imporre saranno:
Ψk ≡
∣∣∣∣∣∣∣∣∣∣XAi
YAi1
XBiYBi
1
XCjYCj
1
∣∣∣∣∣∣∣∣∣∣= 0 (4.24)
Ψk+1 ≡ q3i − q3j −∆ϕij = 0 (4.25)
Gli elementi della matrice Jacobiana [Ψq] e del vettore γ per coppia prismatica sono:
∂Ψk
∂q3i−2
= YBi− YAi
(4.26)
∂Ψk
∂q3i−1
= XAi−XBi
(4.27)
∂Ψk
∂q3i
= − (XBi−XAi
)(Xcj − q3i−2
)− (YBi
− YAi)(Ycj − q3i−1
)(4.28)
∂Ψk
∂q3j−2
= YAi− YBi
(4.29)
68
Cap.4 Analisi della struttura cinematica § 4.3 Coppia prismatica
∂Ψk
∂q3j−1
= XBi−XAi
(4.30)
∂Ψk
∂q3j
= − (XBi−XAi
)(q3j−2 −Xcj
)− (YAi
− YBi)(Ycj − q3j−1
)(4.31)
∂Ψk+1
∂q3i−2
= 0 (4.32)
∂Ψk+1
∂q3i−1
= 0 (4.33)
∂Ψk+1
∂q3i
= 1 (4.34)
∂Ψk+1
∂q3j−2
= 0 (4.35)
∂Ψk+1
∂q3j−1
= 0 (4.36)
∂Ψk+1
∂q3i
= −1 (4.37)
γ(k) = 2q3i [(YAi− YBi
) (q3i−1 − q3j−1) + (XAi−XBi
) (q3i−2 − q3j−2)] +
+q23i [(XAi
−XBi) (q3i−1 − q3j−1) + (YBi
− YAi) (q3i−2 − q3j−2)] (4.38)
69

Cap.4 Analisi della struttura cinematica § 4.4 Vincoli reonomi
γ (k + 1) = 0 (4.39)
4.4 Vincoli reonomi
Detto F il numero di gradi di liberta di un sistema, affinche si possa effettuare l’analisi
cinematica bisogna specificare F leggi di moto per i membri. Un esempio di vincolo
reonomo e quello che traduce l’esistenza di un moto uniformemente accelerato:
Ψ = q −(q0 + q0t+
t2
2q0
)(4.40)
Pertanto, per effettuare l’analisi delle posizioni sara sufficiente imporre, per ogni vincolo
di movimento, l’uguaglianza
Ψ = 0 (4.41)
Derivando rispetto alle incognite derivate qk, (k = 1, ..., 2j1 + F ) si perviene all’analisi
delle velocita:
[Ψq] {q} = −{Ψt} (4.42)
Per l’analisi delle accelerazioni occorrera derivare rispetto al tempo l’ultima equazione:
d
dt{[Ψq (q, t)] {q}} =
[d
dtΨq (q, t)
]{q}+ [Ψq (q, t)]
{˙q}
=
[∂
∂q[Ψq (q, t)] {q}+
∂Ψq
∂t
]{q}+ [Ψq (q, t)]
{˙q}
(4.43)
d
dt{Ψt (q, t)} = [Ψtq] {q}+ {Ψtt} (4.44)
70
Cap.4 Analisi della struttura cinematica § 4.4 Vincoli reonomi
⇒ [Ψq]{
˙q}
= {γ} (4.45)
Dove con γ si indica:
{γ} = − ([Ψq] {q})q {q} − 2 [Ψqt] {q} − {Ψtt} (4.46)
71

Capitolo 5Analisi del movimento
La storia dell’analisi del movimento inizia nel 1878 grazie ad un noto fotografo paesaggista,
Eadweard Muybridge, al quale era stato commissionato di risolvere attraverso la fotografia
un quesito che al tempo destava grande interesse: c’e qualche momento della corsa di un
cavallo in cui tutte e quattro le zampe dell’animale si trovano sollevate dal terreno? Era
infatti convinzione comune che il cavallo si staccasse completamente da terra nella posizione
di massima estensione, situazione che fu spesso raffigurata nei dipinti e disegni degli inizi
del 1800, come nell’esempio di Theodore Gericault:
Figura 5.1: Le derby d’Epsom, Theodore Gericault, 1821
Per rispondere al quesito Muybridge si avvalse della tecnica denominata cronofoto-
72
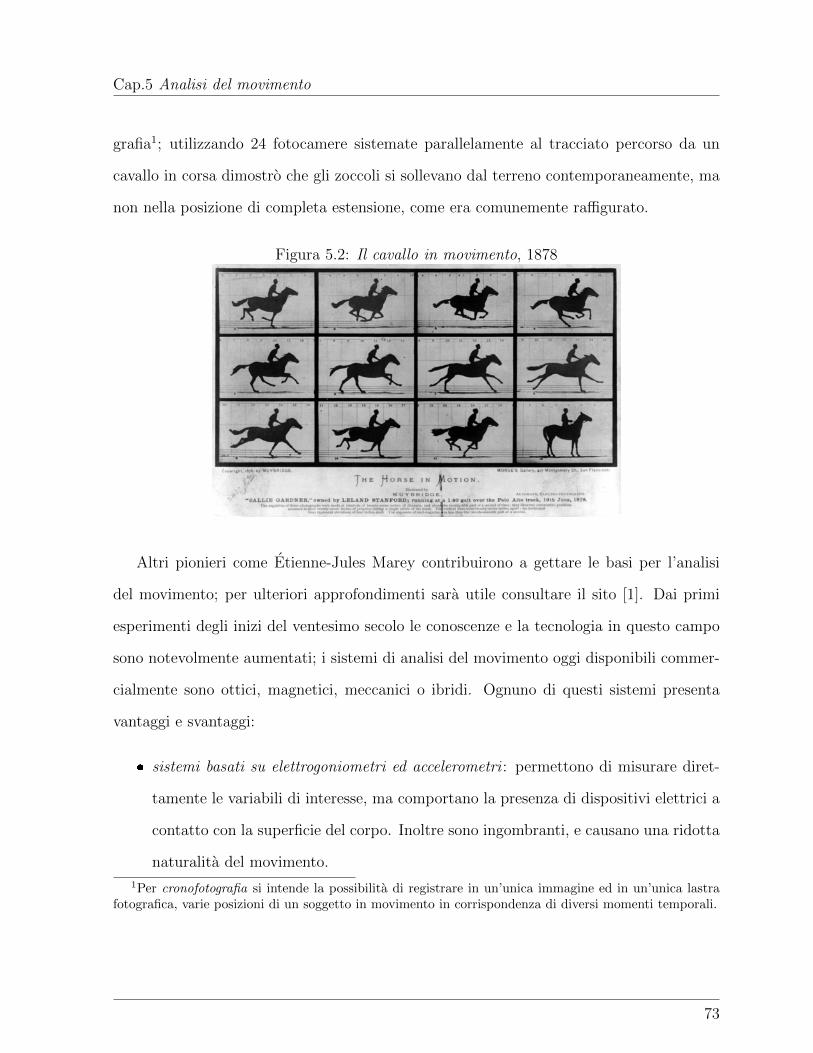
Cap.5 Analisi del movimento
grafia1; utilizzando 24 fotocamere sistemate parallelamente al tracciato percorso da un
cavallo in corsa dimostro che gli zoccoli si sollevano dal terreno contemporaneamente, ma
non nella posizione di completa estensione, come era comunemente raffigurato.
Figura 5.2: Il cavallo in movimento, 1878
Altri pionieri come Etienne-Jules Marey contribuirono a gettare le basi per l’analisi
del movimento; per ulteriori approfondimenti sara utile consultare il sito [1]. Dai primi
esperimenti degli inizi del ventesimo secolo le conoscenze e la tecnologia in questo campo
sono notevolmente aumentati; i sistemi di analisi del movimento oggi disponibili commer-
cialmente sono ottici, magnetici, meccanici o ibridi. Ognuno di questi sistemi presenta
vantaggi e svantaggi:
� sistemi basati su elettrogoniometri ed accelerometri : permettono di misurare diret-
tamente le variabili di interesse, ma comportano la presenza di dispositivi elettrici a
contatto con la superficie del corpo. Inoltre sono ingombranti, e causano una ridotta
naturalita del movimento.
1Per cronofotografia si intende la possibilita di registrare in un’unica immagine ed in un’unica lastrafotografica, varie posizioni di un soggetto in movimento in corrispondenza di diversi momenti temporali.
73
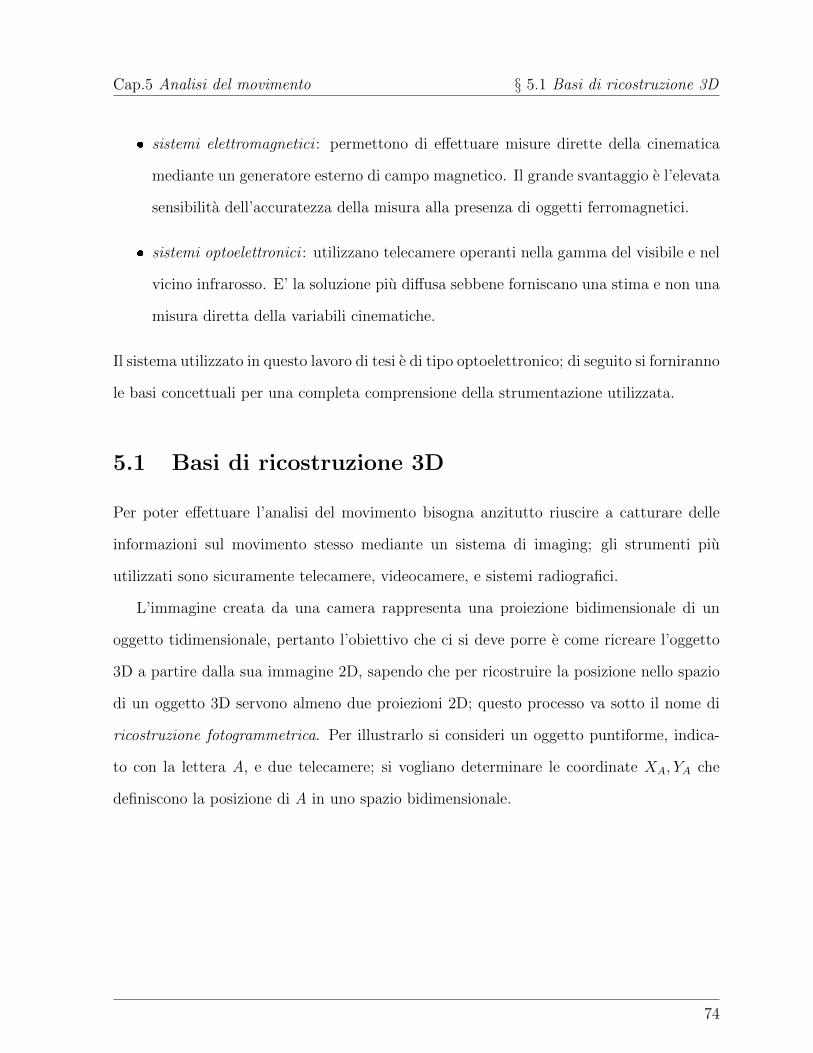
Cap.5 Analisi del movimento § 5.1 Basi di ricostruzione 3D
� sistemi elettromagnetici : permettono di effettuare misure dirette della cinematica
mediante un generatore esterno di campo magnetico. Il grande svantaggio e l’elevata
sensibilita dell’accuratezza della misura alla presenza di oggetti ferromagnetici.
� sistemi optoelettronici : utilizzano telecamere operanti nella gamma del visibile e nel
vicino infrarosso. E’ la soluzione piu diffusa sebbene forniscano una stima e non una
misura diretta della variabili cinematiche.
Il sistema utilizzato in questo lavoro di tesi e di tipo optoelettronico; di seguito si forniranno
le basi concettuali per una completa comprensione della strumentazione utilizzata.
5.1 Basi di ricostruzione 3D
Per poter effettuare l’analisi del movimento bisogna anzitutto riuscire a catturare delle
informazioni sul movimento stesso mediante un sistema di imaging; gli strumenti piu
utilizzati sono sicuramente telecamere, videocamere, e sistemi radiografici.
L’immagine creata da una camera rappresenta una proiezione bidimensionale di un
oggetto tidimensionale, pertanto l’obiettivo che ci si deve porre e come ricreare l’oggetto
3D a partire dalla sua immagine 2D, sapendo che per ricostruire la posizione nello spazio
di un oggetto 3D servono almeno due proiezioni 2D; questo processo va sotto il nome di
ricostruzione fotogrammetrica. Per illustrarlo si consideri un oggetto puntiforme, indica-
to con la lettera A, e due telecamere; si vogliano determinare le coordinate XA, YA che
definiscono la posizione di A in uno spazio bidimensionale.
74
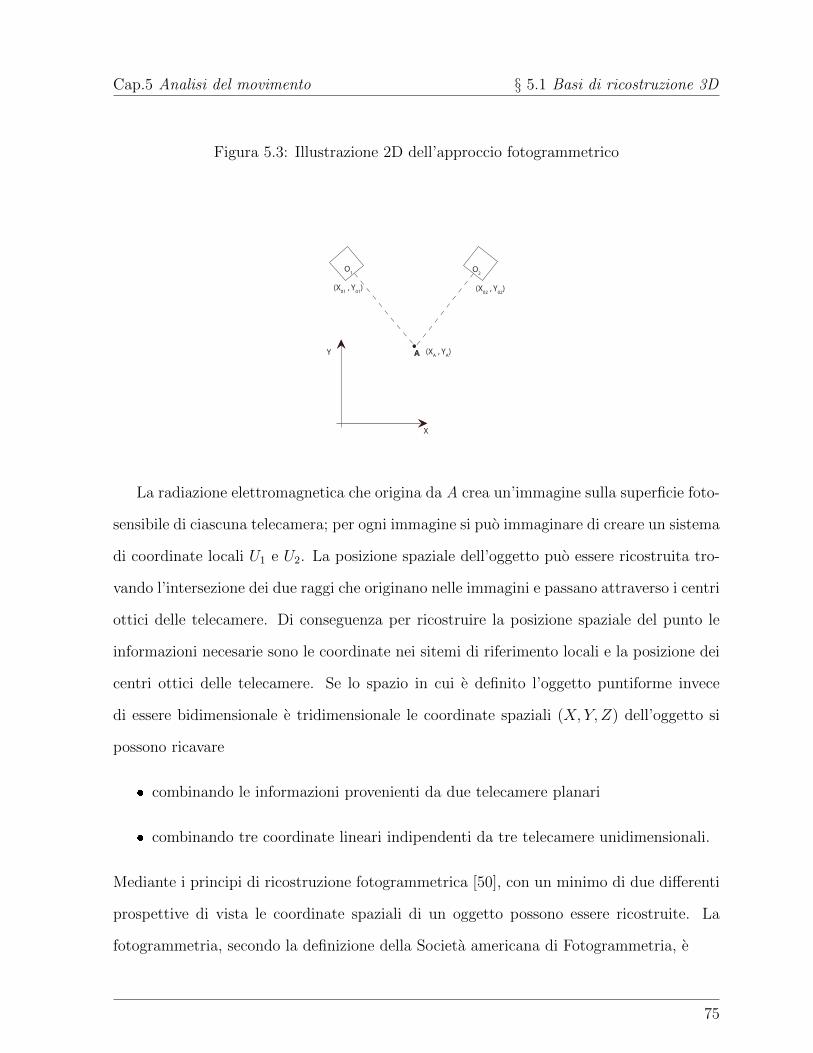
Cap.5 Analisi del movimento § 5.1 Basi di ricostruzione 3D
Figura 5.3: Illustrazione 2D dell’approccio fotogrammetrico
.A (X
A , Y
A)
(X02
, Y02
)(X01
, Y01
)
O1
O2
X
Y
La radiazione elettromagnetica che origina da A crea un’immagine sulla superficie foto-
sensibile di ciascuna telecamera; per ogni immagine si puo immaginare di creare un sistema
di coordinate locali U1 e U2. La posizione spaziale dell’oggetto puo essere ricostruita tro-
vando l’intersezione dei due raggi che originano nelle immagini e passano attraverso i centri
ottici delle telecamere. Di conseguenza per ricostruire la posizione spaziale del punto le
informazioni necesarie sono le coordinate nei sitemi di riferimento locali e la posizione dei
centri ottici delle telecamere. Se lo spazio in cui e definito l’oggetto puntiforme invece
di essere bidimensionale e tridimensionale le coordinate spaziali (X, Y, Z) dell’oggetto si
possono ricavare
� combinando le informazioni provenienti da due telecamere planari
� combinando tre coordinate lineari indipendenti da tre telecamere unidimensionali.
Mediante i principi di ricostruzione fotogrammetrica [50], con un minimo di due differenti
prospettive di vista le coordinate spaziali di un oggetto possono essere ricostruite. La
fotogrammetria, secondo la definizione della Societa americana di Fotogrammetria, e
75
Cap.5 Analisi del movimento § 5.1 Basi di ricostruzione 3D
“L’arte, la scienza e la tecnologia che permette di ottenere informazioni affidabili su
oggetti fisici e sull’ambiente mediante i processi di registrazione, misura e interpretazione
di immagini fotografiche e patterns di energia elettromagnetica radiante o altri fenomeni.”
Esistono due distinti tipi di analisi fotogrammetrica:
� Fotogrammetria metrica, che consiste nell’effettuare misure precise da immagini o
altre fonti per determinare la posizione di markers o punti;
� Fotogrammetria interpretativa, che invece consiste nell’usare tecniche sistematiche di
analisi per riconoscere ed identificare gli oggetti.
I moderni sistemi di analisi del movimento coinvolgono entrambi. Per poter ricostruire
la posizione di punti di interesse, o markers, bisogna anzitutto definire un sistema di
riferimento fisso, normalmente definito sistema di riferimento di laboratorio, rispetto al
quale vengono calcolate le coordinate dei markers. Sui segmenti del corpo si possono poi
definire dei sistemi di riferimento locali, mobili. Nella figura sono riportate tre telecamere
fisse che ricostruiscono la posizione del marker.
Figura 5.4: Un sistema a tre telecamere
.X1
Y1
Z1
u1
v1
X2
Y2
Z2
v2
u2
Y3
Z3
v3
u3
X3
L’origine del sistema di riferimento per ogni telecamera e posizionata nel punto focale.
Assumendo che l’immagine che si genera e piatta, un asse puo essere eliminato; i restanti
76
Cap.5 Analisi del movimento § 5.1 Basi di ricostruzione 3D
due assi vengono denominati ui e vi rispettivamente. Una volta definiti i sistemi di ri-
ferimento vengono risolte delle equazioni per risalire alle coordinate spaziali assolute del
marker. In queste equazioni compaiono sia parametri esterni (l’orientazione spaziale della
telecamera) sia parametri interni, come le caratteristiche della lente o il tipo di telecamera;
l’esatta conoscenza di tali valori e la base di una corretta ricostruzione.
La tecnica standard si fonda sull’utilizzo di due immagini; ogni altra immagine viene utiliz-
zata per creare una coppia di telecamere aggiuntiva (con quattro telecamere, ad esempio,
si avranno sei coppie).
Uno dei principi fondamentali alla base dell’analisi fotogrammetrica e la condizione di
colinearita, che richiede che un marker e la sua immagine formino una linea retta che passa
attraverso il punto focale. Un’altra condizione altrettanto importante e la condizione di
complanarieta, che richiede che il marker, la sua coppia di immagini e i due punti focali
giacciano su uno stesso piano. Se queste due condizioni sono rispettate, la posizione
spaziale del marker puo essere ricostruita. Detto punto principale dell’immagine l’origine
degli assi del s.d.r. della telecamera, e adottata la seguente notazione:
� (X, Y, Z) coordinate assolute del marker
� (X0, Y0, Z0) coordinate assolute del punto focale
� (u, v) coordinate del punto proiezione del marker nell’immagine
� ∆u e ∆v gli errori su u e v
� (up, vp) coordinate del punto principale dell’immagine
� C la lunghezza focale
� λ il fattore di scala lineare
� M una matrice di trasformazione 3 x 3 dal s.d.r. dell’immagine al s.d.r. assoluto
77

Cap.5 Analisi del movimento § 5.1 Basi di ricostruzione 3D
le equazioni che permettono di ricostruire la posizione del marker costituiscono il sistema:
u− up + ∆u
v − vp + ∆v
−C
= λ [M ]
X −X0
Y − Y0
Z − Z0
(5.1)
Le equazioni (5.1) nel tempo sono state molto rimaneggiate; ad oggi vengono soprattut-
to utilizzate tecniche implicite per la ricostruzione delle coordinate del marker. Queste
tecniche si basano tutte sul sistema di equazioni classico, trasformato in una serie di para-
metri incogniti, funzione di costanti o delle coordinate del punto oggetto. Le costanti sono
complesse relazioni matematiche che coinvolgono uno o piu parametri della telecamera.
Per determinare tali parametri sperimentalmente e necessaria una calibrazione, e un
dispositivo per la calibrazione. I passi da seguire per la ricostruzione delle coordinate dei
markers sono quindi due:
� inizialmente il dispositivo utilizzato per la calibrazione viene fotografato, e la sua im-
magine, insieme alle coordinate assolute dell’oggetto, sono utilizzate per determinare
le costanti presenti nelle equazioni;
� successivamente il dispositivo per la calibrazione viene sostituito con i markers inco-
gniti le cui coordinate devono essere determinate.
Sicuramente la tecnica piu utilizzata per la ricostruzione 3D e quella sviluppata da Mar-
zan&Karara e basata sulla Direct Linear Transformation (DLT). Questa tecnica riscrive
le equazioni classiche nella forma:
u+ ∆u =L1X + L2Y + L3Z + L4
L9X + L10Y + L11Z + 1
v + ∆v =L5X + L6Y + L7Z + L8
L9X + L10Y + L11Z + 1(5.2)
78

Cap.5 Analisi del movimento § 5.2 Calibrazione
Per una descrizione dettagliata si puo consultare [37]. L’ulteriore vantaggio nella formu-
lazione implicita di Marzan e che non e piu necessario che gli assi ottici delle telecamere
siano paralleli, condizione indispensabile invece se si fa ricorso alle (5.1).
5.2 Calibrazione
Affinche il sistema restituisca risultati corretti, e necessaria una calibrazione (che va ese-
guita prima di effettuare l’acquisizione vera e propria), in modo da permettere al software
di calcolare la posizione e l’orientamento assoluti di ogni videocamera e di interpretare
correttamente le coordinate ricevute. Dal punto di vista operativo, la calibrazione consi-
ste nel calcolare gli 11 coefficienti DLT per ciascuna camera utilizzata; questi coefficienti
esprimono:
� parametri interni:
– lunghezza focale
– coordinate del punto principale
– coefficienti di distorsione
� parametri esterni:
– posizione del sistema di riferimento della telecamera rispetto a quello assoluto
Il processo di ricostruzione delle coordinate spaziali di un oggetto e soggetto a molte fonti di
errore; probabilmente la piu comune e la piu comunemente trascurata e la qualita e la cura
impiegate durante la calibrazione. L’accuratezza2 dello strumento usato in calibrazione e
cruciale perche influenzera anche l’accuratezza della ricostruzione 3D. Sara impossibile
2Nella teoria degli errori, l’accuratezza e il grado di corrispondenza del dato teorico, desumibile da unaserie di valori misurati (campione di dati), con il dato reale o di riferimento, ovvero la differenza tra valormedio campionario e valore vero o di riferimento.
79

Cap.5 Analisi del movimento § 5.2 Calibrazione
avere un’accuratezza nella conoscenza delle coordinate dell’oggetto maggiore di quella che
si e ottenuta in fase di calibrazione; per questo motivo si raccomanda di usare particolare
attenzione in calibrazione.
Il numero minimo di punti selezionati necessari per determinare i parametri incogniti
nell’algoritmo di ricostruzione varia a seconda della tecnica di ricostruzione utilizzata; per
la DLT sono necessari almeno sei markers. Con sei markers si otterrano dodici equazioni
nelle undici incognite L1, ..., L11; il numero di equazioni sara sovrabbondante , e si dovra
ricorrere al metodo dei minimi quadrati per risolvere il sistema. Da notare che l’errore
non e drasticamente influenzato dal numero di punti utilizzato, a patto di effettuare la
calibrazione con sufficiente accuratezza.
Per effettuare la calibrazione, inizialmente si creava nel volume di lavoro una distri-
buzione di markers secondo delle posizioni note con estrema precisione; questo implicava
la necessita di creare delle strutture di markers ingombranti e costose. Un approccio dif-
ferente e rappresentato da una procedura di auto-calibrazione, sviluppata da Borghese
& Cerveri [11] che non richiede la preventiva conoscenza delle posizioni dei markers 3D.
Con questo approccio basta disporre di una barra rigida ai cui estremi sono collocati dei
markers; il sistema deve conoscere la distanza 3D tra i due markers. La barra deve poi
essere mossa all’interno del volume di lavoro; il sistema riconosce, grazie ad un algoritmo
di template matching, i markers. Dalla registrazione della posizione dei markers istante
per istante si ricava la distanza tra i markers stessi, e questa distanza viene comparata con
il valore vero che il sistema ha in memoria. Il confronto tra la distanza nota e quella sti-
mata fornisce informazioni sull’accuratezza delle misure effettuate dal sistema e permette
di stimare la componente casuale di errore associata al processo di misura. Con questa
procedura, un grande numero di punti di calibrazione distribuiti lungo tutto il volume puo
essere collezionato in poco tempo. L’unica informazione metrica di cui il sistema deve
disporre e la vera distanza 3D tra le estremita della barra, e questo valore e critico per
una corretta calibrazione; se la distanza non e fornita correttamente, si introduce una
80
Cap.5 Analisi del movimento § 5.3 Markers
degradazione nella accuratezza. Ovviamente, poiche questa misura deve essere presa una
sola volta, e ragionevole assumere che potra essere effettuata con adeguata accuratezza.
5.3 Markers
I markers sono degli oggetti di forma predeterminata e di lucentezza maggiore rispetto a
qualsiasi altro oggetto presente nel volume di lavoro, che vengono riconosciuti dal siste-
ma e la cui posizione nel tempo viene registrata. La forma scelta deve essere invariante
rispetto alla rotazione, altrimenti cambierebbe quando il corpo si muove. Per il riconosci-
mento della forma i sistemi utilizzano algoritmi di pattern recognition, mediante i quali
un oggetto viene riconosciuto come marker solamente se la sua forma eguaglia quella pre-
definita, mentre per il riconoscimento del segnale deve essere impostato un valore di soglia
sul segnale video. Per l’analisi biomeccanica i markers vengono posizionati su cosiddetti
punti di repere anatomico, punti in cui lo scorrimento tra la cute e l’osso e minimo. Per
la definizione dei punti di repere si e fatto riferimento allo standard della Societa interna-
zionale di Biomeccanica (ISB), in particolare a [43] per gli arti inferiori ed a [51] per quelli
superiori.
I markers utilizzati nei sistemi optoelettronici possono essere di due tipi:
� markers attivi, che emettono un segnale luminoso. Tipicamente sono costituiti da
LED a bassa potenza ( < 1W). Richiedono una sorgente di energia esterna;
� markers passivi, oggetti costituiti da sfere o semisfere di materiale plastico rivestiti
di carta catarinfrangente; la forma sferica, oltre a garantire l’invarianza rispetto
alla rotazione, permette la miglior riflessione dei raggi infrarossi (ampi angoli di
riflessione).
Di seguito vengono analizzati nel dettaglio i due tipi di markers.
81
Cap.5 Analisi del movimento § 5.3 Markers
5.3.1 Markers attivi
Sebbene nel passato siano stati utilizzati vari tipi di markers attivi, ad oggi vengono comu-
nemente utilizzati i LED; tipicamente la lunghezza d’onda scelta e nel vicino infrarosso,
poco sopra gli 800 nm, per evitare disturbi visivi ai soggetti. Il maggiore vantaggio connes-
so con l’utilizzo dei markers attivi e la semplicita nell’etichettatura (labeling), oltre all’alta
frequenza di campionamento quando vengono utilizzati pochi markers.
La scelta dell’uso di markers attivi comporta pero notevoli problemi:
� necessita dell’alimentazione esterna, che comporta la presenza di cavi elettrici che
limitano la liberta di movimento del soggetto;
� limitato angolo di emissione luminosa, che implica problemi nel caso in cui, durante
il movimento, il marker debba ruotare. Si puo aumentare l’angolo di emissione, ma
questo va a scapito dell’intensita della radiazione luminosa che raggiunge la camera.
� i sensori che rilevano il segnale luminoso proveniente dai markers generalmente ri-
chiedono che il segnale provenga in modo consequenziale tra i vari markers; questo
limita il numero di markers che possono essere utilizzati e causa un campionamento
non simultaneo delle coordinate dei markers.
5.3.2 Markers passivi
I markers passivi riflettono la luce nella direzione da cui proviene. I vantaggi connessi
con l’utilizzo di questi markers sono che i movimenti del soggetto non sono ostacolati
dalla presenza dei markers stessi, neanche nel caso di rotazioni, e che i markers passivi
sono visibili da ogni direzione. Non richiedendo l’applicazione di cavi, possono essere
utilizzati anche in caso di studio di movimenti rapidi e ampi. Il fatto che i markers vengano
visti contemporaneamente dai sensori e vantaggioso dal punto di vista del processamento
del segnale, ma come svantaggio comporta la necessita di un’operazione di labeling per
82

Cap.5 Analisi del movimento § 5.4 Videocamere
assegnare un’etichetta ad ogni coppia di coordinate; questo processo e usualmente espletato
durante una fase del processing detta tracking.
Altri vantaggi sono la liberta del movimento e la possibilita di fare ricorso ad un numero
potenzialmente illimitato di markers. Uno svantaggio e che la frequenza di campionamento
e limitata dalla videocamera utilizzata; tipicamente le frequenze utilizzate sono intorno ai
100 Hz, mantenendo un’elevata risoluzione e accuratezza, oppure ai 200 Hz, con una signi-
ficativa riduzione delle stesse. Queste frequenze, comunque, sono ampiamente sufficienti
per descrivere i comuni movimenti umani, anche nel caso di analisi di un gesto sportivo.
5.4 Videocamere
Sono unita integrate di cattura ed elaborazione delle immagini; la parte sensibile e costi-
tuita da un sensore optoelettronico. I sensori optoelettronici possono essere divisi in due
classi: sensori addressable e non addressable.
Un sensore addressable, o indirizzabile, e in grado di associare ogni pixel dell’immagine
con una coppia di coordinate; le videocamere sono un esempio di questo tipo di sensori,
poiche l’imagine e codificata nel cosiddetto formato raster : l’immagine e scansionata linea
per linea e colonna per colonna, ottenendo una rappresentazione monodimensionale del
segnale. In pratica le relazioni spaziali tra diverse parti dell’immagine sono trasformate
in scostamenti temporali. Questo tipo di sensore puo raccogliere in una stessa immagine
le informazioni provenienti da piu sensori contemporaneamente. I piu diffusi sensori di
tipo addressable sono CCD (Charge Coupled Device) e CMOS (Complementary Metal
Oxide Semiconductor); i primi hanno costituito la tecnologia dominante fino agli anni ’80,
ma con l’avvento del digitale si e preferito passare ai CMOS, dotati di un’uscita di tipo
digitale.
Un sensore non addressable, invece, da un’informazione complessiva sull’immagine a
quel dato istante di tempo. I fotodiodi a effetto laterale, ad esempio, forniscono come out-
83
Cap.5 Analisi del movimento § 5.5 Sincronizzazione dei sensori e marker detection
put le coordinate del punto nell’immagine maggiormente illuminato. Per questa ragione,
se vengono utilizzati per rilevare i segnali luminosi provenienti dai markers, e necessario
che sia illuminato un unico marker per volta. Questo ovviamente e possibile solamente se
si fa ricorso a markers attivi; inoltre, la luce proveniente da un marker puo riflettersi su
delle superfici, il che potrebbe portare ad una falsa detezione di un marker su un qualche
sensore, situazione che corromperebbe la misura.
L’illuminazione della scena e affidata ad una corona di led IR che circonda l’obiettivo.
Per quanto concerne la scelta dell’illuminazione infrarossa, questa e dovuta al fatto che
la lunghezza d’onda propria degli infrarossi non e percepita dall’occhio umano, risultando
dunque invisibile. Questo permette, in fase di cattura, di lavorare con normali luci ar-
ticiali, mentre e sconsigliata la presenza di luce solare sulla scena, in quanto essa invade
parzialmente il campo di emissione infrarosso, e potrebbe generare quindi rifessi rilevabili
dalle videocamere.
Un cavo USB standard alimenta sia la videocamera sia la corona di led IR.
5.5 Sincronizzazione dei sensori e marker detection
Per effettuare una misura tridimensionale, e necessario utilizzare almeno due sensori; que-
sto fa sorgere il problema della sincronizzazione dei segnali provenienti dai vari sensori.
Per i sensori di tipo addressable questo problema e risolto inserendo nell’hardware un
sincronizzatore; per l’altro tipo di sensori il problema e piu complicato, perche i segnali
provenienti dai vari sensori devono essere convertiti in forma digitale in modo sincrono,
e questa operazione deve essere fatta per tutti i markers attivi, che come si e visto in
precedenza sono scansionati sequenzialmente nel tempo.
Per quanto riguarda, invece, la rilevazione dei markers il problema che sorge e quello di
trovare il giusto equilibrio tra collezionare sufficienti informazioni per la ricostruzione 3D
e evitare di sovraccaricare il sistema con troppe informazioni, che comporterebbero anche
84

Cap.5 Analisi del movimento § 5.6 Elaborazione da parte del computer
l’eventualita di creare dei falsi positivi. Nei moderni sistemi di analisi del movimento si
utilizzano due approcci: la creazione di un valore di soglia, al di sotto del quale il segnale
non viene memorizzato, e il processing del segnale immagine. Innanzitutto il segnale
video viene comparato, pixel per pixel, con un valore di soglia; questo stadio e molto
semplice e allo stesso tempo molto efficace. Ovviamente con questo approccio esiste la
possibilita di trascurare il segnale proveniente da un marker perche troppo debole, e allo
stesso tempo di accettare come valido un segnale di intensita elevata, ma non proveniente
da un marker. Sul segnale vengono poi applicati degli algoritmi di pattern recognition:
l’immagine viene comparata con un’immagine di riferimento. Se l’immagine concorda con
quella di riferimento, la funzione di cross-correlazione e massimizzata. La maschera con
cui viene fatta la comparazione e studiata in modo tale da massimizzare la reiezione del
rumore; il risultato e che il rapporto segnale-rumore dopo l’applicazione della maschera e
notevolmente aumentato.
5.6 Elaborazione da parte del computer
La quantita di dati che il computer riceve e la velocita alla quale tali dati devono essere
trattati dipende da vari fattori:
� N numero di markers
� S numero di sensori
� F frequenza di campionamento
La relazione che lega tutti questi fattori e la seguente:
T = N · S · F (5.3)
85

Cap.5 Analisi del movimento § 5.6 Elaborazione da parte del computer
Dove T e un parametro che esprime l’ammontare di dati che devono essere elaborati
ad ogni istante di tempo. Se si vuole conoscere la quantita di dati che devono essere
elaborati durante un’intera acquisizione bastera moltiplicare il parametro T per la durata
dell’acquisizione stessa:
D = N · S · F · t = T · t (5.4)
Per dare un’idea del numero di bites totali richiesti da una singola acquisizione si consideri
che, per 20 markers visti da 4 sensori che lavorano ad una frequenza di 100 Hz per 30
secondi, assumendo una codifica a 4 bit, si dovranno elaborare 960000 bites.
Durante l’acquisizione dei dati il sistema deve effettuare anche un processing on-line
dei dati stessi, per valutare la loro affidabilita e per effettuare una compressione. Dopo
queste due fasi il processing di base che il sistema deve operare e costituito da:
� esaltare le coordinate
� etichettare i markers
� correggere le distorsioni
� effettuare la ricostruzione 3D
L’etichettatura dei markers e una procedura richiesta in caso ci si avvalga di markers
passivi e di sensori addressable. L’utente e chiamato a specificare un’etichetta per ogni
marker nei primi frames. Il sistema, poi, seguendo la curva che caratterizza le coordinate di
ciascun marker, assegna la stessa etichetta a quel marker per ogni frame. A volte qualche
marker puo scomparire per qualche frame, ad esempio a causa di un oscuramento ad opera
di una parte del corpo; per ovviare a questo fenomeno puo essere richiesto di interpolare
una parte mancante di traiettoria di qualche marker.
La correzione delle distorsioni serve a compensare le non linearita ottiche e dei sen-
sori; essa viene usualmente portata a termine mediante un’espressione polinomiale con
coefficienti computati, in fase di calibrazione, in base alla misura di un oggetto di controllo.
86
Cap.5 Analisi del movimento § 5.7 Sistema BTS
Per quanto attiene alla ricostruzione 3D delle coordinate, infine, si e gia esposto, nel
paragrafo 5.1, l’approccio basato sulla DLT. Il set di equazioni che trasforma le coordinate
spaziali nelle coordinate nel piano dell’immagine e il seguente:
x− x0 = −c · M11 (X −X0) +M12 (Y − Y0) +M13 (Z − Z0)
M31 (X −X0) +M32 (Y − Y0) +M33 (Z − Z0)(5.5)
y − y0 = −c · M21 (X −X0) +M22 (Y − Y0) +M23 (Z − Z0)
M31 (X −X0) +M32 (Y − Y0) +M33 (Z − Z0)(5.6)
dove si e indicato con c la lunghezza focale delle lenti, con (x0, y0) le coordinate del
punto principale, con (X0, Y0, Z0) le coordinate del punto focale e con Mij i nove elementi
della matrice di rotazione che permette di passare dal riferimento spaziale al riferimento
dell’immagine [50]; di questi nove elementi solamente tre sono indipendenti.
Il grande problema nell’utilizzo di questa equazione e la natura non lineare delle due
equazioni. La DLT supera questo ostacolo riarrangiando i termini delle equazioni, e
introducendo altri parametri.
5.7 Sistema BTS
Il sistema BTS Smart-D e un sistema optoelettronico digitale ad alta risoluzione che con-
sente l’analisi di ogni tipo di movimento. e un dispositivo medico e come tale soddisfa i
requisiti essenziali della direttiva Dispositivi Medici 93/42/CEE recepita in Italia con il
decreto legislativo 24 Febbraio 1997 numero 46. Il sistema e anche conforme alle direttive
europee inerenti la Compatibilita Elettromagnetica (89/336/CEE e successive modifiche)
e alle direttive sugli apparecchi in Bassa Tensione (73/23/CEE e successive modifiche).
Smart-D e in grado di ricostruire tridimensionalmente le traiettorie di un insieme di
markers applicati al corpo del paziente. L’acquisizione del movimento e fatta mediante te-
lecamere ad infrarossi posizionate attorno al volume in cui avviene l’azione, le cui posizioni
sono state precedentemente calcolate attraverso una procedura di calibrazione.
87

Cap.5 Analisi del movimento § 5.7 Sistema BTS
Le prestazioni fornite sono in linea con i piu precisi sistemi ottici. Lo stesso sistema,
con una semplice sostituzione degli obiettivi, puo essere utilizzato per volumi di lavoro
che vanno da poche decine di centimetri fino a qualche metro di lato. Smart-D e anche
compatibile con segnali EMG, con piattaforme di forza e con altri dispositivi di misura
per poter svolgere un’analisi clinica maggiormente dettagliata.
L’architettura del sistema di acquisizione e riportata nella figura:
Figura 5.5: Architettura sistema optoelettronico
Struttura di
acquisizione
Software di
elaborazione
Movimento
Sequenza di
immagini
Telecamere,
illuminatori,
schede di
acquisizione …
Rilevazione dei
marcatori
5.7.1 Componenti del sistema
Di seguito vengono analizzati i principali componenti del sistema:
� markers: sono markers passivi, sfere di materiale plastico ricoperte di carta rin-
88
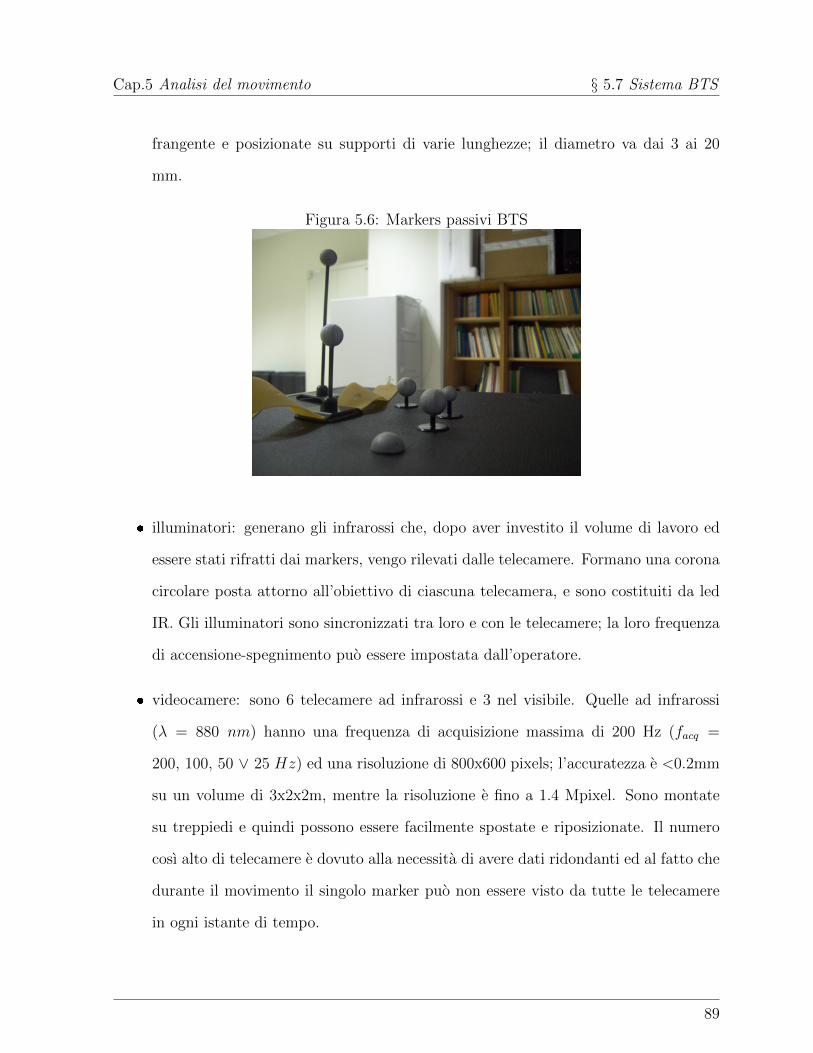
Cap.5 Analisi del movimento § 5.7 Sistema BTS
frangente e posizionate su supporti di varie lunghezze; il diametro va dai 3 ai 20
mm.
Figura 5.6: Markers passivi BTS
� illuminatori: generano gli infrarossi che, dopo aver investito il volume di lavoro ed
essere stati rifratti dai markers, vengo rilevati dalle telecamere. Formano una corona
circolare posta attorno all’obiettivo di ciascuna telecamera, e sono costituiti da led
IR. Gli illuminatori sono sincronizzati tra loro e con le telecamere; la loro frequenza
di accensione-spegnimento puo essere impostata dall’operatore.
� videocamere: sono 6 telecamere ad infrarossi e 3 nel visibile. Quelle ad infrarossi
(λ = 880 nm) hanno una frequenza di acquisizione massima di 200 Hz (facq =
200, 100, 50 ∨ 25 Hz) ed una risoluzione di 800x600 pixels; l’accuratezza e <0.2mm
su un volume di 3x2x2m, mentre la risoluzione e fino a 1.4 Mpixel. Sono montate
su treppiedi e quindi possono essere facilmente spostate e riposizionate. Il numero
cosı alto di telecamere e dovuto alla necessita di avere dati ridondanti ed al fatto che
durante il movimento il singolo marker puo non essere visto da tutte le telecamere
in ogni istante di tempo.
89

Cap.5 Analisi del movimento § 5.7 Sistema BTS
Figura 5.7: Telecamere BTS
� set per calibrazione, costituito da tre aste ortogonali tra loro sulle quali sono posti
dei markers; una delle aste, detta wand, si puo estrarre per eseguire la seconda fase
della calibrazione.
� software Smart-D, con tre principali applicazioni:
– Smart Capture, che consente di abilitare l’acquisizione dei segnali voluti (op-
toelettronico, elettromiografico, dinamometrico...), di effettuare la calibrazione
per ognuno di questi segnali e di attivare la registrazione dei segnali stessi; a
questo livello si puo anche settare la soglia al di sotto della quale il segnale non
viene riconosciuto come proveniente da un marker.
– Smart Tracker, che effettua il labeling ed il tracking dei markers;
– Smart Analyzer, nel quale si possono creare protocolli per ottenere grandezze a
partire dalla conoscenza delle posizioni dei markers, ad esempio s.d.r. relativi,
vettori tra markers, angoli tra questi vettori...
90

Cap.5 Analisi del movimento § 5.7 Sistema BTS
Figura 5.8: Smart-Analyzer
5.7.2 Calibrazione
Quando si comincia una calibrazione, innanzitutto bisogna posizionare le telecamere in
modo tale che siano centrate sul volume di lavoro che si vuole analizzare; dopo averle
posizionate occorrera focalizzarle; ovviamente questa operazione deve essere ripetuta so-
lamente se il volume di lavoro e stato cambiato dopo l’ultima calibrazione, oppure se le
telecamere sono state spostate. Dopo avere effettuato queste operazioni preliminari, si
puo procedere alla calibrazione vera e propria; in accordo con Borghese & Cerveri [11], la
calibrazione e un processo a due step.
Il primo passo e l’acquisizione della posizione del s.d.r. assoluto: all’interno del vo-
lume di lavoro viene posizionata una terna cartesiana, della quale il sistema conosce le
caratteristiche; in particolare la terna e cosı fatta:
91
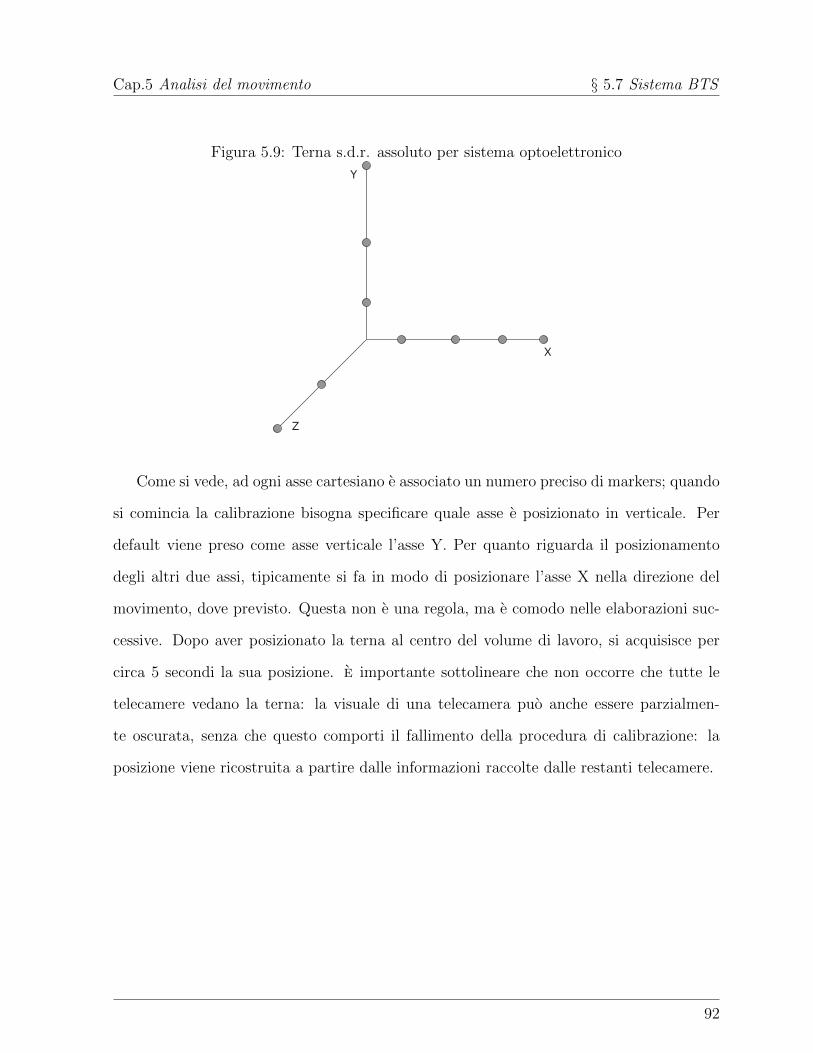
Cap.5 Analisi del movimento § 5.7 Sistema BTS
Figura 5.9: Terna s.d.r. assoluto per sistema optoelettronico
Y
X
Z
Come si vede, ad ogni asse cartesiano e associato un numero preciso di markers; quando
si comincia la calibrazione bisogna specificare quale asse e posizionato in verticale. Per
default viene preso come asse verticale l’asse Y. Per quanto riguarda il posizionamento
degli altri due assi, tipicamente si fa in modo di posizionare l’asse X nella direzione del
movimento, dove previsto. Questa non e una regola, ma e comodo nelle elaborazioni suc-
cessive. Dopo aver posizionato la terna al centro del volume di lavoro, si acquisisce per
circa 5 secondi la sua posizione. e importante sottolineare che non occorre che tutte le
telecamere vedano la terna: la visuale di una telecamera puo anche essere parzialmen-
te oscurata, senza che questo comporti il fallimento della procedura di calibrazione: la
posizione viene ricostruita a partire dalle informazioni raccolte dalle restanti telecamere.
92
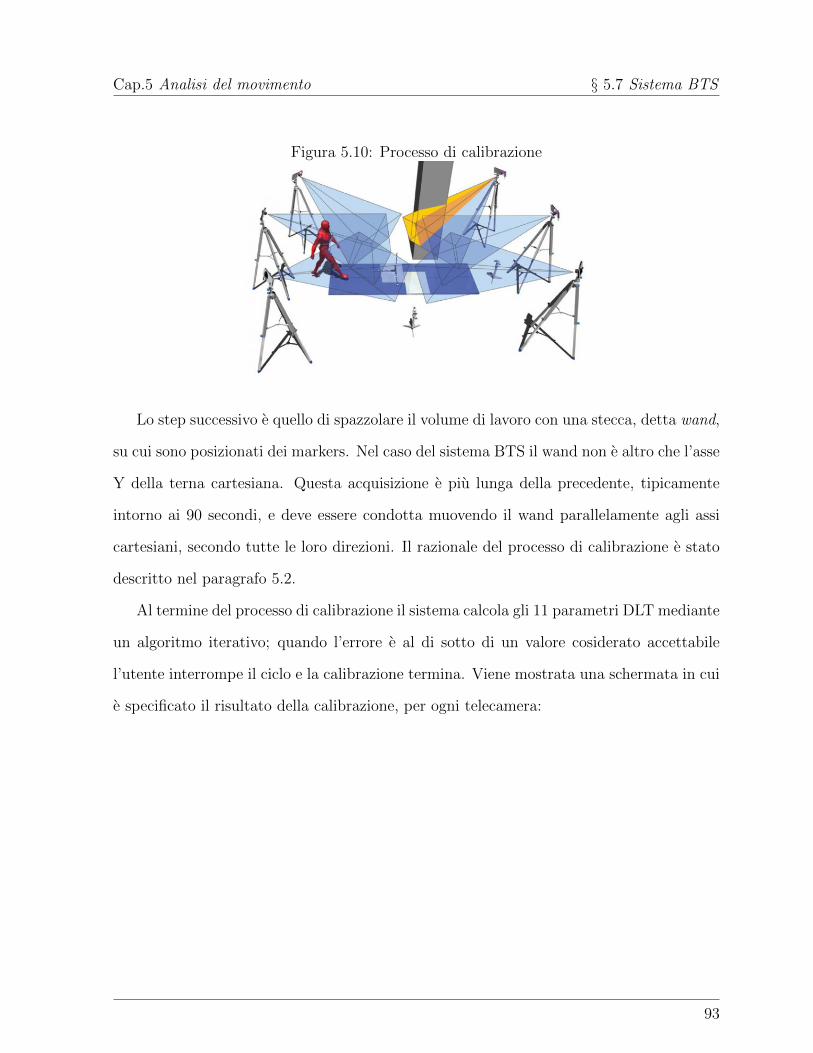
Cap.5 Analisi del movimento § 5.7 Sistema BTS
Figura 5.10: Processo di calibrazione
Lo step successivo e quello di spazzolare il volume di lavoro con una stecca, detta wand,
su cui sono posizionati dei markers. Nel caso del sistema BTS il wand non e altro che l’asse
Y della terna cartesiana. Questa acquisizione e piu lunga della precedente, tipicamente
intorno ai 90 secondi, e deve essere condotta muovendo il wand parallelamente agli assi
cartesiani, secondo tutte le loro direzioni. Il razionale del processo di calibrazione e stato
descritto nel paragrafo 5.2.
Al termine del processo di calibrazione il sistema calcola gli 11 parametri DLT mediante
un algoritmo iterativo; quando l’errore e al di sotto di un valore cosiderato accettabile
l’utente interrompe il ciclo e la calibrazione termina. Viene mostrata una schermata in cui
e specificato il risultato della calibrazione, per ogni telecamera:
93

Cap.5 Analisi del movimento § 5.7 Sistema BTS
Figura 5.11: Risultato della calibrazione
3D Reconstruction Mean and Standard Deviation rappresentano una statistica della
differenza tra le interdistanze nominali della bacchetta e quelle ricostruite. 2D Recon-
struction Mean and Standard Deviation rappresentano parametri statistici dell’errore di
ri-proiezione sul piano immagine di ciascuna telecamera.
Il sistema BTS ha una risoluzione spaziale garantita di 1/5 di millimetro.
94

Capitolo 6Modello
Il modello sviluppato e un modello 2D che permette di risolvere il problema dinamico
attraverso una formulazione multibody delle equazioni del moto. In esso lo scheletro
viene modellato come un sistema costituito da aste unidimensionali rigide ed inestensibili,
connesse tra loro mediante coppie rotoidali o prismatiche ideali. Le ipotesi, quindi, su cui
si fonda il modello sono:
� moto planare. Questa e forse l’ipotesi piu forte, perche limita il campo di appli-
cabilita del modello ai soli movimenti che si svolgono interamente all’interno di un
piano. In realta con buona approssimazione molti movimenti tipici possono essere
considerati planari, come ad esempio movimenti di sollevamento-abbassamento del
corpo o movimenti di maneggiamento di oggetti.
� corpi rigidi. Questa ipotesi e consistente con la rigidita delle strutture ossee.
� coppie prismatiche e rotoidali. Con buona approssimazione la maggior parte delle
articolazioni puo essere assimilata ad una di queste due coppie. Ovviamente ogni
articolazione in realta ha una struttura complessa ed e in grado di collegare i membri
ossei in piu di un piano, ma se ci si limita allo studio di un moto planare allora le
articolazioni posssono essere modellate come coppie rotoidali o prismatiche. Si noti
95
Cap.6 Modello
che un modello che permette di effettuare una descrizione puntuale della struttura e
della motilita delle articolazioni sarebbe molto complesso; tipicamente tali modelli,
detti fenomenologici (vedi paragrafo1.1), vengono sviluppati quando si vuole studiare
una unica articolazione.
� articolazioni prive di attrito. Anche questa sembra un’ipotesi ragionevole dal mo-
mento che fisiologicamente il moto relativo tra le ossa e coadiuvato dalla presenza
del liquido sinoviale.
Fermo restando tali ipotesi, il modello e valido per un numero qualsiasi di corpi; e necessario
che uno di questi sia preso come membro di riferimento, o telaio.
Prima di effettuare l’analisi dinamica bisogna descrivere le struttura cinematica del
meccanismo in esame. Per fare cio si e creata una matrice, detta matrice di connetivita, in
cui ad ogni riga corrisponde una coppia cinematica. Le righe della matrice di connettivita
contengono tutte le informazioni ncessarie a caratterizzare completamente la coppia stessa,
come la posizione, il tipo, i membri che connette.
Nel modello ad ogni membro cinematico deve essere associato un sistema di riferimento
locale, con origine nel centro di massa e orientazione arbitraria. Poiche il moto e planare,
per descrivere la posizione di un membro bastera specificare tre coordinate, che sono le
due coordinate dell’origine del s.d.r. locale piu l’angolo tra l’asse delle ascisse del s.d.r.
globale e quello del s.d.r. locale, misurato in senso antiorario.
96

Cap.6 Modello § 6.1 Main
Figura 6.1: Posizione del corpo i-esimo
q3i
q3i-1
q3i-2 X
Y
x
y
O
Oi
corpo i
Evidentemente questo approccio porta a definire un numero di coordinate sovrabbon-
dante, ma ha il vantaggio di essere facilmente implementabile e di generare delle equa-
zioni con complessita algebrica ridotta rispetto all’approccio con un numero minimo di
coordinate.
Le analisi dinamica e cinematica che il modello svolge necessitano che in input vengano
forniti gli andamenti degli angoli relativi tra i segmenti corporei; questi vengono assimilati
a dei vincoli, e vengono aggiunti ai vincoli dovuti alla presenza delle coppie cinematiche.
Nel seguito vengono descritte le subroutines che compongono il programma, insieme
al main che costituisce l’interfaccia con l’utente. Per una maggiore comprensione le sub-
routines vengono divise in blocchi funzionali; si individuano tre blocchi: il blocco delle
equazioni di vincolo, il blocco per la preparazione dei termini che compaiono nell’equa-
zione del moto, il blocco che genera e risolve l’equazione del moto. In ultimo verranno
descritte delle subroutine accessorie che completano il programma.
6.1 Main
Il main e la parte del programma che riceve gli input e quindi l’unica parte che deve essere
modificata per adattare il modello al caso sperimentale in esame. I dati da specificare
97

Cap.6 Modello § 6.1 Main
sono:
� nbodies : numero di corpi presi in esame. Come detto puo essere un qualsiasi numero
naturale maggiore di uno.
� nrev : numero di coppie rotoidali presenti.
� nprism: numero di coppie prismatiche
� ndriv : numero di driving constraint.
� nframe: numero del corpo che funge da telaio.
� con: matrice di connettivita, dotata di 10 colonne e un numero di righe pari al
numero di coppie totali. Il tipo di coppia e specificato con un numero pari a 10
in caso di coppia rotoidale e pari ad 11 per coppia prismatica. Con la convenzione
adottata nei paragrafi 4.2 e 4.3, la generica riga relativa ad una coppia rotoidale si
esprimera
i j 10 xAi yAi xAj yAj 0 0 0
mentre la generica riga relativa ad una coppia prismatica sara:
i j 11 xAi yAi xBi yBi xCj yCj ∆ϕij
dove con i e j si sono indicati i corpi connessi dalla coppia.
� bodylength: vettore riga i cui elementi sono pari alle lunghezze dei corpi.
� mi ed Ii: vettori delle masse e dei momenti di inerzia, i cui elementi esprimono le
masse e i momenti d’inerzia dei corpi.
Per quanto riguarda i dati antropometrici da inserire (massa dei corpi e momenti di
inerzia), le fonti a cui fare riferimento sono varie, ma riconducibili a due approcci:
98
Cap.6 Modello § 6.1 Main
– Dati provenienti dallo studio su cadaveri, come in Dempster [24], Clauser [17] e
Chandler [14]. Il problema che sorge nell’utilizzare questi dati e la scarsa genera-
lizzabilita, poiche gli studi sono stati condotti su pochi soggetti, anche solo due
o tre cadaveri, e sempre maschi caucasici; inoltre i Body Segment Parameters
(BSP) variano molto con la morfologia: la massa, ad esempio, e proporzionale
al cubo dell’altezza. Infine, il corpo subisce delle modificazioni post-mortem
(ad esempio la massa del tronco aumenta a causa delle tecniche utilizzate per
la conservazione), e quindi anche i parametri antropometrici variano.
– Dati presi da soggetti vivi, come Jensen [32], Zatsiorsky [52] e de Leva [23], che
ha aggiustato i dati ricavati da Zatsiorsky riferendoli al s.d.r. comunemente
utilizzato nell’analisi biomeccanica; il problema di questo approccio e il danno
alla salute dei soggetti in esame, perche si tratta di tecniche in cui si fa uso
di radiazioni elettromagnetiche, il tempo necessario a ricavare i dati e il costo
della procedura. Un metodo alternativo e stato proposto da Damavandi in [19]
ed e basato sull’utilizzo di una piattaforma di forza, quindi assolutamente non
invasivo e non dannoso. L’inconveniente di questo metodo e che non consente
di ricavare i momenti di inerzia, ma solamente le masse e le posizioni dei centri
di massa dei segmenti corporei.
In [19] e mostrato un confronto tra i dati ricavati dai vari autori, e da questo confronto
emerge che i dati di de Leva [23] sono i piu affidabili, oltre ad essere anche completi;
per queste ragioni si e scelto di fare riferimento a questa fonte per ricavare i dati
antropometrici.
� forces : matrice delle forze, in cui ogni riga esprime una forza, mentre gli elementi
della riga i-esima esprimono, rispettivamente:
– forces(i, 1): corpo sul quale la forza e esercitata;
99
Cap.6 Modello § 6.1 Main
– forces(i, 2), forces(i, 3), forces(i, 4): componenti cartesiane della forza;
– forces(i, 5), forces(i, 6): coordinate del punto di applicazione della forza, espres-
se nel sistema di riferimento locale;
– forces(i, 7): questo elemento e pari a 0 se le componenti cartesiane della forza
sono espresse nel s.d.r. assoluto, mentre e pari ad 1 se tali componenti sono
fornite nel s.d.r. locale.
– forces(i, 8): pari a 0 se la forza e costante nel tempo, mentre e pari al nu-
mero che esprime il case corrispondente nella subroutine Timeforcevar (vedi
paragrafo 6.3.3) se la forza e variabile nel tempo.
� alpha1 : fattore α di Baumgarte (paragrafo 3.9).
� beta1 : fattore β di Baumgarte.
� t initial : tempo iniziale.
� t final : tempo finale.
� numpoints : numero di istanti di tempo totali che si vuole costituiscano il tempo
discreto di riferimento.
� q0: vettore colonna in cui sono specificate le posizioni iniziali dei centri di massa dei
corpi; sotto l’ipotesi che i corpi siano costituiti da aste unidimensionali ed omogenee, i
centri di massa si trovano a meta dei segmenti. Le posizioni devono essere specificate
seguendo l’ordine con cui sono stati numerati i corpi. A titolo di esempio il vettore
100

Cap.6 Modello § 6.1 Main
per un sistema costituito da due corpi sara:
q3i−2
q3i−1
q3i
q3j−2
q3j−1
q3j
� driving : matrice con un numero di righe pari al numero di frames e tante colonne
quanti sono i drivings. Questa matrice specifica l’andamento nel tempo degli angoli
relativi tra i corpi in esame; l’andamento e cosı imposto, e il modello deve calcolare
le posizioni, le velocita e le accelerazioni dei centri di massa dei segmenti congruenti
con le posizioni iniziali e questi moti imposti.
Dopo aver preso tutti i dati necessari al programma, il Main si occupa di effettuare l’in-
tegrazione numerica, richiamando la funzione ode23 della libreria di Matlab® (The Ma-
thWorks TM). Ode23 e un solutore a singolo step di equazioni differenziali ordinarie del
tipo:
y = f (t, y) (6.1)
Gli input che riceve sono la funzione f , il vettore tempo all’interno del quale si vuole
effettuare l’integrazione, le condizioni iniziali e dei parametri opzionali che cambiano le
proprieta di integrazione impostate di default. L’output e la y. Ode23 e meno popolare di
ode45, altro solutore di Matlab, perche e meno preciso, ma viene preferito nel caso in cui la
tolleranza sui valori sia alta (bassa in modulo). Nel caso del modello sono stati impostati
dei valori di tolleranza dell’ordine di 10−4. La funzione f e la funzione Dinamica, che verra
descritta nel seguito, mentre le condizioni iniziali sono le posizioni iniziali (il vettore q0) e
101

Cap.6 Modello § 6.1 Main
le velocita iniziali, calcolate in modo congruente con i vincoli risolvendo il sistema
[Ψq] {q0} = −{Ψt} (6.2)
Il Main, infine, si occupa di lanciare alcuni output grafici, sia cinematici che dinamici:
per i primi vengono graficati gli andamenti degli angoli, delle velocita e delle accelerazioni
relative tra segmenti ossei adiacenti, mentre per i secondi viene mostrata l’animazione del
modello stick&ball, degli angoli relativi, delle reazioni vincolari e delle coppie relative tra
segmenti ossei adiacenti.
Per una maggior comprensione della struttura del programma, si faccia riferimento al
seguente schema, che riassume l’organizzazione del programma stesso:
Figura 6.2: Struttura del programma
Main
Analisi
cinematica
Analisi
dinamica
eq.ni vincolomatrice
Jacobiana
vettori Gamma
e Psit
matrice delle
massevettore forze
esterne
lettura stampa
102
Cap.6 Modello § 6.2 Scrittura delle equazioni vincolari
6.2 Scrittura delle equazioni vincolari
6.2.1 Constraint
Genera le equazioni di vincolo. Per quanto riguarda i vincoli scleronomi, le equazioni
vengono generate mediante un ciclo for che scorre le righe della matrice di connettivita e
valuta il tipo di coppia presente, analizzandone il terzo elemento. Se tale elemento e pari a
10 (coppia rotoidale) allora viene richiamata la funzione Revolute, che genera le equazioni
di vincolo dovute alla presenza di una coppia rotoidale (si faccia riferimento al paragrafo
4.2). Se, invece, tale elemento e pari ad 11 (coppia prismatica), in accordo con quanto
detto nel paragrafo 4.3, le equazioni di vincolo corrispondenti saranno:
∣∣∣∣∣∣∣∣∣∣XAi
YAi1
XBiYBi
1
XCjYCj
1
∣∣∣∣∣∣∣∣∣∣= 0 (6.3)
q3i − q3j −∆ϕij = 0 (6.4)
dove ∆ϕij e l’ultimo elemento della riga della matrice di connettivita che si sta valutando.
Per quanto attiene ai vincoli reonomi, invece, la funzione Constraint non fa altro che
richiamare la funzione Driving, e aggiungendo alle equazioni di vincolo gia calcolate quelle
dovute ai vincoli di movimento.
Infine, vengono aggiunti i vincoli dovuti alla presenza del telaio, imponendo che le tre
coordinate del membro telaio non varino nel tempo.
6.2.2 Driving
In questo modulo vengono specificate le seguenti grandezze:
� i corpi coinvolti nel vincolo di movimento, detti body i(1) e body j(1);
103

Cap.6 Modello § 6.2 Scrittura delle equazioni vincolari
� la direzione in cui agisce il vincolo di movimento:
– body i(2)=2 e body j(2)=2 se il vincolo agisce lungo la direzione x;
– body i(2)=1 e body j(2)=1 se il vincolo agisce lungo la direzione y;
– body i(2)=0 e body j(2)=0 se il vincolo e di tipo angolare.
� gli elementi del vettore dei vincoli Ψdriv;
� gli elementi della matrice Jacobiana Ψq driv;
� la derivata prima del vettore dei vincoli, detta Ψt driv;
� la derivata seconda del vettore dei vincoli, detta Ψtt driv.
I corpi interessati dall’i-esimo vincolo di movimento non sono altro che il primo e secondo
elemento della i-esima riga dell matrice di connettivita.
Per quanto riguarda invece la scrittura degli elementi del vettore dei vincoli si egua-
glia la differenza tra le coordinate dei corpi coinvolte nel vincolo con il valore ottenuto
interpolando il driving constraint in input al modello al tempo t nel quale interessa calco-
lare il vincolo. Per fare cio occorre richiamare la funzione Interpolazione spline che verra
descritta nel seguito. Per chiarezza si consideri il caso di vincolo angolare relativo tra il
corpo 1 e il corpo 2; l’elemento i-esimo del vettore dei vincoli sara:
Ψdriv(i− esimo) = (q6 − q3)− i1 (6.5)
Dove con i1 si e indicato il valore della funzione interpolante al tempo t.
Lo stesso ragionamento viene poi applicato alle derivate prima e seconda rispetto al
tempo di Ψdriv, cosı come alla derivata rispetto a q.
104
Cap.6 Modello § 6.2 Scrittura delle equazioni vincolari
6.2.3 Driving derivatives
Questa funzione si occupa di fare le derivate rispetto al tempo dei driving che vengo-
no dati in input al modello. Per farlo si avvale delle funzioni di differenziazione dette
Derivative cwt e Derivative dwt, sviluppate da Luo, Bai & Shao in [35] sulla base della
Trasformata Wavelet. Queste sono le migliori funzioni disponibili in Matlab per effettuare
la differenziazione; gli input che richiedono sono, oltre naturalmente al vettore che si vuole
derivare e al passo di differenziazione, il nome della wavelet che si vuole utilizzare e il
fattore di scala per la funzione wavelet.
Nel programma si e utilizzata la Trasformata Wavelet Discreta, perche rende possibile
il calcolo della trasformata wavelet senza necessita di ricorrere alle approssimazioni insite
nella discretizzazione della Trasformata Wavelet Continua. Per ulteriori approfondimenti
sulla teoria della trasformata wavelet si rimanda a [26].
6.2.4 Interpolazione spline
Effettua l’interpolazione sulla base della funzione di Matlab interp1 (interpolazione uno-
dimensionale di dati). L’interpolazione viene eseguita su di un set di dati, oltre che sulla
sua derivata prima e seconda, calcolate richiamando la funzione Derivative dwt.
Gli Input che richiede sono i dati da interpolare, insieme alla loro derivata prima e
seconda, il vettore rispetto al quale sono stati derivati e il vettore contenente i punti in
cui vogliono essere interpolati.
105

Cap.6 Modello § 6.3 Generazione degli elementi costitutivi delle equazioni del moto
6.3 Generazione degli elementi costitutivi delle equa-
zioni del moto
6.3.1 Jacobian
Genera la matrice Jacobiana [Ψq] e il vettore Ψt, procedendo riga per riga. Come la
funzione Constraint, con un ciclo for valuta il terzo elemento della matrice di connettivita;
a seconda del valore inserisce gli elementi dovuti ad una coppia rotoidale oppure quelli
dovuti ad una coppia prismatica.
Aggiunge poi gli elementi di [Ψq] dovuti alla presenza del telaio, e quelli dovuti ai
vincoli di movimento, richiamando Driving.
6.3.2 Massa
Questa funzione assembla la matrice delle masse. Per moto bidimensionale che coinvolge
n corpi tale matrice e pari a:
[M ] =
M1 0 · · · 0
0 M2 0 0
... 0. . .
...
0 0 · · · Mn
(6.6)
dove il generico blocco i-esimo e pari a:
[Mi] =
miIi 0 0
0 miIi 0
0 0 Ii
(6.7)
Come detto in precedenza, mi ed Ii sono forniti dall’utente nel Main, e rappresentano
rispettivamente la massa ed il momento d’inerzia del membro i-esimo.
106

Cap.6 Modello § 6.3 Generazione degli elementi costitutivi delle equazioni del moto
6.3.3 Forza & Timeforcevar
Genera il vettore delle forze generalizzate. Prende in input la matrice forces creata nel
main; a seconda del valore che costituisce l’ottavo elemento della i-esima riga della matrice
valuta se la forza e costante o variabile nel tempo. Nel secondo caso richiama la funzio-
ne Timeforcevar. In questa funzione, con uno switch, viene fornito un andamento della
forza diverso a seconda del numero che e stato specificato nella matrice forces. Questo
andamento deve essere fornito dall’utente.
Dopo aver raccolto gli andamenti sia delle forze costanti che di quelle variabili, per ogni
riga della matrice controlla se la forza e espressa nel s.d.r. assoluto o in quello relativo,
andando a valutare il settimo elemento della riga. A seconda del valore trovato modifica
il valore delle componenti cartesiane della forza, fornite con gli elementi da due a quattro
della matrice forces.
6.3.4 Fgamma
Questa subroutine assembla il vettore γ. Il principio di azione e lo stesso della funzione
Jacobian: valuta il terzo elemento della i-esima riga della matrice di connettivita, e a
seconda del valore crea la i-esima riga del vettore γ compatibile con quella coppia. Quando
arriva alla fine della matrice di connettivita aggiunge al vettore γ tre righe nulle che tengono
conto del telaio, e poi tante righe quanti sono i driving constraints; l’i-esimo elemento
dovuto ad un vincolo di movimento e posto pari al termine del vettore Ψtt driv relativo a
quel vincolo e creato dalla funzione Driving.
107

Cap.6 Modello § 6.4 Risoluzione delle equazioni del moto
6.3.5 Lambda
Lambda calcola le reazioni vincolari utilizzando il metodo delle matrici partizionate. In-
nanzitutto assembla la matrice dei coefficienti A:
A =
M ΨTq
Ψq 0
(6.8)
partiziona l’inversa:
A−1 =
C11 C12
C21 C22
(6.9)
ed infine calcola {λ} dalle formule ricavate nel paragrafo 2.12:
{λ} = [C21] {Fe}+ [C22] {γ} (6.10)
6.4 Risoluzione delle equazioni del moto
6.4.1 Accel
Calcola le accelerazioni sulla base della formulazione di Udwadia-Kalaba, esposta nel pa-
ragrafo 3.8, modificata introducendo i fattori di Baumgarte. Questa formulazione e stata
scelta perche non richiede che la matrice dei coefficienti abbia tutte le righe linearmente
indipendenti, ovvero che la matrice Jacobiana abbia rango pieno, ed inoltre non impone
che i vincoli siano indipendenti tra loro, ma solamente che siano congruenti. In accordo
con la formulazione di Udwadia-Kalaba, per calcolare le accelerazioni del sistema vincolato
e necessario cacolare la pseudoinversa della martice
[D] =(
[Ψq] [M ]−12
)(6.11)
108
Cap.6 Modello § 6.5 Funzioni accessorie
Tale calcolo e portato a termine mediante l’utilizzo della funzione di libreria di Matlab
pinv, la quale si avvale della decomposizione SVD (si veda A.5.2); la tolleranza con cui
tale decomposizione e effettuata puo essere impostata dall’utente, ma per default viene
posta pari a
tol = max(m,n) ∗ norm(X) ∗ eps
Accel richiede in input gli output delle funzioni Massa, Jacobian, Constraint, Fgamma,
Forza, nonche i fattori di Baumgarte e posizioni e velocita all’istante di tempo considerato,
che vengono calcolati nel Main.
6.4.2 Dinamica
e la funzione che risolve le equazioni del moto, ricavando le accelerazioni a partire dalla
conoscenza di posizioni e velocita. In Dinamica vengono richiamate tutte le funzioni
che generano elementi delle equazioni del moto; questo passaggio e necessario per poter
richiamare Accel, che in input richiede che vengano fornite tutte queste grandezze. Dopo
aver richiamato anche Accel, la funzione Dinamica si occupa di lanciare Lambda e, quindi,
di computare le reazioni vincolari.
L’output di Dinamica sono le velocita e le accelerazioni al tempo t considerato.
6.5 Funzioni accessorie
Sono funzioni di complemento al funzionamento delle subroutine sopra descritte oppure
sono utilizzate per generare output grafici.
� Abmat : genera la matrice di trasformazione dal s.d.r. relativo a quello assoluto.
� Confronto coord : si occupa di confrontare le coordinate dei centri di massa dei
membri ottenute dal modello con quelle ricavate in fase sperimentale dal sistema
optoelettronico.
109
Cap.6 Modello § 6.6 Output grafici del modello
� Confronto vel&acc: come la funzione precedente, effettua il confronto tra velocita e
accelerazioni computate dal modello con quelle rilevate dal sistema optoelettronico.
� Coords: richiamando Abmat permette di ricavare le coordinate assolute a partire
dalla conoscenza delle coordinate relative.
� Lambdamod : poiche le λ che vengono presentate in output grafico sono i moduli delle
reazioni vincolari, questa subroutine calcola per ogni articolazione il modulo della
reazione vincolare.
� Revolute: genera le equazioni vincolari dovute alla presenza di una coppia rotoidale.
Viene richiamata da Constraint.
6.6 Output grafici del modello
Gli output sono cinematici e dinamici.
Per quanto riguarda gli output cinematici il modello calcola gli angoli relativi tra i corpi,
come differenza tra le coordinate angolari dei corpi considerati, le velocita angolari rela-
tive e le accelerazioni angolari relative. Gli andamenti di queste grandezze sono mostrati
in ndriv figure, ognuna contenente l’andamento dell’angolo, della velocita e dell’accele-
razione relativi tra due corpi adiacenti. Lanciando poi le subroutines Confronto coord e
Confronto vel&acc si grafica il confronto tra coordinate, velocita ed accelerazioni calcolate
dal modello e rilevate in fase sperimentale.
Per quanto attiene agli output dinamici, invece, vengono mostrati gli andamenti dei
moduli delle reazioni vincolari e delle coppie relative tra corpi adiacenti; si fa notare che
le reazioni vincolari non sono altro che i moltiplicatori di Lagrange relativi alla coppia che
unisce i due corpi in esame, mentre le coppie sono i moltiplicatori di Lagrange relativi al
driving presente tra i corpi considerati.
110
Capitolo 7Analisi sperimentale e risultati
Il modello sviluppato e stato validato mediante una serie di acquisizioni, riconducibili a
tre movimenti di base:
� flesso-estensione del gomito
� flesso-estensione del ginocchio
� flesso-estensione della spalla
La scelta di questi movimenti e stata dettata dall’esigenza di analizzare movimenti pla-
nari e dall’impossibilita di effettuare acquisizioni prolungate o con un elevato numero di
markers, a causa della limitata capacita di calcolo dei calcolatori utilizzati; questi movi-
menti sono comunque rappresentativi di movimenti molto comuni, che vengono compiuti
frequentemente anche in ambito lavorativo. Per ognuno di questi movimenti fondamentali
sono state acquisite sequenze semplici e doppie. Si sottolinea comunque che il modello puo
lavorare con un numero qualsiasi di markers e di corpi, purche il movimento analizzato sia
tutto compreso in un piano.
Durante le acquisizioni sono stati registrati, oltre alla posizione dei markers, anche il
segnale elettromiografico e l’immagine video. Tutti e tre questi segnali sono perfettamente
sincroni, pur avendo frequenze di acquisizione in generale diverse tra loro. Come ulteriore
111
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
validazione del modello i soggetti scelti per svolgere le tre acquisizioni sono diversi: il
modello, infatti, tra gli altri input richiede i parametri antropometrici del soggetto, ed
e quindi completamente adattabile, fatta salva la scarsa letteratura esistente per alcune
classi di soggetti, come donne oppure soggetti non caucasici.
I parametri del moto che sono stati registrati e che servono come input per il modello
sono le posizioni iniziali dei centri di massa dei corpi, ricavati a partire dalla conoscenza
delle posizioni iniziali dei markers, situati nei punti di repere anatomici [43, 51], e gli
angoli relativi tra i corpi, ricavati a partire dalla conoscenza delle posizioni dei markers
nel tempo.
7.1 Flesso-estensione della spalla
7.1.1 Setup sperimentale
In questa serie di acquisizioni i corpi presi in esame sono stati la schiena, l’avambraccio
ed il braccio destri. Il soggetto era chiamato a compiere, in posizione seduta, una flesso-
estensione della spalla ad una velocita ritenuta normale dal soggetto. I markers sono
stati posizionati sull’acromion destro e sinistro, sull’olecrano destro, sulle porzioni distali
dell’ulna e del radio, in corrispondenza della settima vertebra cervicale e tra L5 ed S1.
112
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.1: Posizione markers per flesso-estensione spalla
Per quanto attiene al prelevamento del segnale elettromiografico, sono stati registrati
i segnali provenienti dal deltoide (deltoideus anterior) e dal bicipite (biceps brachii caput
longus), mediante l’applicazione di due coppie di elettrodi sulla cute, posizionati seguendo
le Raccomandazioni Europee per l’Elettromiografia di Superficie [39, 2].
Per calibrare il sistema si e acquisita la posizione del s.d.r. assoluto per 8.8 secondi,
mentre il volume di lavoro e stato spazzolato con il wand per 120 secondi. In tabella sono
riportati i risultati della calibrazione:
Tabella 7.1: Calibrazione flesso-estensione spalla
3D reconstruction [mm] Mean Standard DeviationWand 0.250 0.263
2D residual [pixel] Mean Standard DeviationCamera 1 0.098 0.076Camera 2 0.086 0.057Camera 3 0.091 0.063Camera 4 0.086 0.069Camera 5 0.111 0.103Camera 6 0.108 0.079
Dopo aver acquisito la Massima Contrazione Volontaria (MCV) sia per il bicipite che
113

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
per il deltoide, si e passato ad effettuare le acquisizioni.
Il soggetto era chiamato a svolgere delle flesso-estensioni della spalla destra da posi-
zione seduta cercando di mantenere la schiena ferma e il movimento il piu possibile nel
piano sagittale. Sulla mano destra era applicato un peso di 3 kg, per aumentare lo sforzo
muscolare. Si sono eseguite due acquisizioni:
� una doppia flesso-estensione, di durata 10.55 secondi;
� una estensione, durata 3.37 secondi.
7.1.2 Modellazione
Dopo aver acquisito le posizioni nel tempo dei markers ed aver effettuato il tracking neces-
sario per assegnare i markers, si e creato un protocollo nello Smart-Analyzer per generare
le grandezze in input al modello:
� baricentro braccio destro come nuovo punto tra marker acromion destro e marker
olecrano destro;
� baricentro avambraccio destro come nuovo punto tra marker olecrano destro e punto
medio tra i due markers applicati sul polso destro;
� baricentro schiena come nuovo punto tra marker c7 e marker sacro (marker L5-S1).
� nuovo punto, definito come punto medio tra acromion destro e sinistro;
� vettore tra c7 e punto medio tra gli acromion;
� vettore tra c7 e sacro;
� piano sagittale come piano definito dai due vettori precedenti.
� vettore braccio come vettore tra acromion destro ed olecrano destro;
114

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
� vettore avambraccio come vettore tra olecrano destro e punto medio tra i due markers
applicati sul polso destro;
� vettore schiena come vettore tra c7 e sacro.
� proiezione acromion destro su piano sagittale;
� proiezione baricentro braccio su piano sagittale;
� proiezione baricentro avambraccio su piano sagittale;
� proiezione -asse x s.d.r. assoluto (-lab i) su piano sagittale;
� proiezione asse y s.d.r. assoluto (lab j ) su piano sagittale;
� prodotto vettoriale tra proiezione -lab i e proiezione lab j.
� nuovo s.d.r. relativo con origine nella proiezione dell’acromion destro sul piano
sagittale e con assi pari a:
– asse x: proiezione -lab i su piano sagittale;
– asse y: proiezione lab j su piano sagittale;
– asse z: prodotto vettoriale tra proiezione -lab i e proiezione lab j.
� proiezione baricentro braccio su piano sagittale espresso nel s.d.r. relativo⇒ q04, q05
� proiezione baricentro avambraccio su piano sagittale espresso nel s.d.r. relativo ⇒
q07, q08
� angolo tra asse x s.d.r. relativo e vettore proiezione braccio ⇒ q06
� angolo tra asse x s.d.r. relativo e vettore proiezione avambraccio ⇒ q09
115
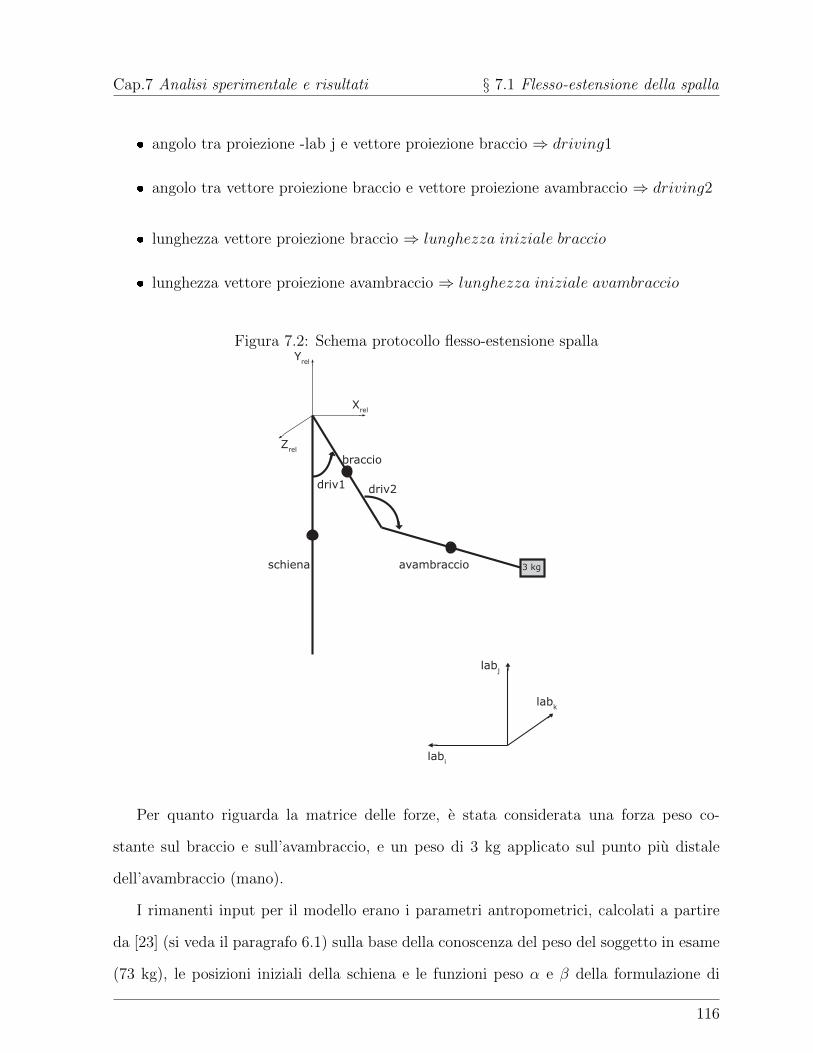
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
� angolo tra proiezione -lab j e vettore proiezione braccio ⇒ driving1
� angolo tra vettore proiezione braccio e vettore proiezione avambraccio ⇒ driving2
� lunghezza vettore proiezione braccio ⇒ lunghezza iniziale braccio
� lunghezza vettore proiezione avambraccio ⇒ lunghezza iniziale avambraccio
Figura 7.2: Schema protocollo flesso-estensione spalla
Xrel
Zrel
Yrel
labi
labj
labk
driv1 driv2
schiena avambraccio
braccio
3 kg
Per quanto riguarda la matrice delle forze, e stata considerata una forza peso co-
stante sul braccio e sull’avambraccio, e un peso di 3 kg applicato sul punto piu distale
dell’avambraccio (mano).
I rimanenti input per il modello erano i parametri antropometrici, calcolati a partire
da [23] (si veda il paragrafo 6.1) sulla base della conoscenza del peso del soggetto in esame
(73 kg), le posizioni iniziali della schiena e le funzioni peso α e β della formulazione di
116
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Baumgarte. Le posizioni iniziali della schiena non sono state prese a partire dalle posizioni
dei markers (proiezione baricentro schiena nel s.d.r. relativo) perche il telaio (la schiena)
nel modello e stato considerato fermo; per questo motivo le posizioni iniziali del baricentro
della schiena sono state fissate arbitrariamente, in accordo con le restanti posizioni iniziali
e soprattutto con la posizione del’origine del s.d.r. relativo. Le funzioni peso, invece, sono
state prese nulle perche non c’erano violazioni significative delle equazioni vincolari dovute
al processo di integrazione numerica.
Gli ultimi parametri da settare erano gli input per la funzione derivative dwt ; si e scelto
di utilizzare come wavelet function una spline a sei punti, perche questa dava i risultati
migliori in termini di regolarita: se si diminuiva il numero di punti gli andamenti delle
derivate dei drivings erano troppo irregolari, ma se si aumentava sopra sei il numero di
punti l’andamento diventava troppo regolare e si perdevano informazioni importanti.
7.1.3 Risultati
7.1.3.1 Doppia flesso-estensione della spalla
Una volta inseriti tutti gli input si e lanciato il Main del modello con Matlab; i risultati
delle analisi cinematica e dinamica sono stati raccolti in grafici. I primi grafici ad essere
mostrati sono quelli che illustrano l’andamento degli angoli relativi tra corpi adiacenti e
delle loro derivate prima e seconda:
117
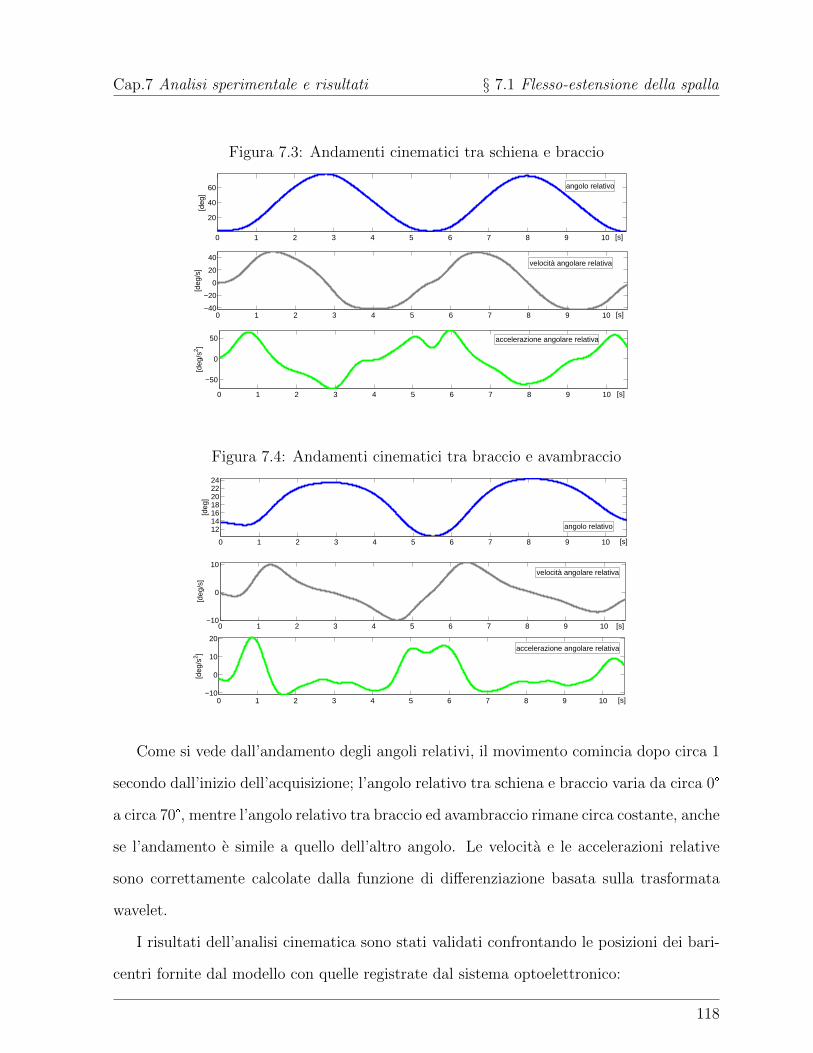
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.3: Andamenti cinematici tra schiena e braccio
0 1 2 3 4 5 6 7 8 9 10
20
40
60 angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6 7 8 9 10−40
−20
0
20
40velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8 9 10
−50
0
50 accelerazione angolare relativa
[s]
[deg
/s2 ]
Figura 7.4: Andamenti cinematici tra braccio e avambraccio
0 1 2 3 4 5 6 7 8 9 10
12141618202224
angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6 7 8 9 10−10
0
10velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8 9 10−10
0
10
20accelerazione angolare relativa
[s]
[deg
/s2 ]
Come si vede dall’andamento degli angoli relativi, il movimento comincia dopo circa 1
secondo dall’inizio dell’acquisizione; l’angolo relativo tra schiena e braccio varia da circa 0°
a circa 70°, mentre l’angolo relativo tra braccio ed avambraccio rimane circa costante, anche
se l’andamento e simile a quello dell’altro angolo. Le velocita e le accelerazioni relative
sono correttamente calcolate dalla funzione di differenziazione basata sulla trasformata
wavelet.
I risultati dell’analisi cinematica sono stati validati confrontando le posizioni dei bari-
centri fornite dal modello con quelle registrate dal sistema optoelettronico:
118

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.5: Confronto coordinate braccio
0 2 4 6 8 10
0.05
0.1
0.15
coord x baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8 10
−0.15
−0.1
−0.05
coord y baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8 100
0.05
0.1
coord x baricentro da sistema optoelettr
[s]
[m]
0 2 4 6 8 10
−0.15
−0.1
−0.05
coord y baricentro da sistema optoelettr
[s]
[m]
Figura 7.6: Confronto coordinate avambraccio
0 2 4 6 8 10
0.1
0.2
0.3
0.4
coord x baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8 10
−0.4
−0.3
−0.2
−0.1
coord y baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8 100
0.1
0.2
0.3
0.4
coord x baricentro da sistema optoelettr
[s]
[m]
0 2 4 6 8 10
−0.4
−0.3
−0.2
−0.1
coord y baricentro da sistema optoelettr
[s]
[m]
C’e un’ottima corrispondenza sia per gli andamenti che per i valori. In piu, a circa 9.8
secondi il sitema optoelettronico perde per qualche frame il baricentro dell’avambraccio;
questo non influisce assolutamente sul modello. Infatti gli unici input che vengono forniti
al modello per tutta la durata dell’acquisizione sono gli andamenti degli angoli relativi
tra i corpi; se il sistema optoelettronico perde la posizione del baricentro dell’avambraccio
per qualche frame, allora anche l’angolo relativo tra braccio ed avambraccio si perdera.
119

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Tuttavia, utilizzando la funzione derivative dwt, si e in grado di interpolare le parti di
traiettoria mancanti, purche queste siano relative a pochi frames.
Lo stesso confronto e stato fatto per le velocita e per le accelerazioni calcolate e
misurate:
Figura 7.7: Confronto velocita & accelerazioni schiena-braccio
0 2 4 6 8 10
−0.5
0
0.5
vel ang rel calcolata dal modello
[s]
[rad
/s]
0 2 4 6 8 10
−1
−0.5
0
0.5
1
acc ang rel calcolata dal modello
[s]
[rad
/s2 ]
0 2 4 6 8 10
−0.5
0
0.5
vel ang rel calcolata dal sistema optoelettr
[s]
[rad
/s]
0 2 4 6 8 10
−1
0
1
2
acc ang rel calcolata dal sistema optoelettr
[s]
[rad
/s2 ]
Figura 7.8: Confronto velocita & accelerazioni braccio-avambraccio
0 2 4 6 8 10
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
vel ang rel calcolata dal modello
[s]
[rad
/s]
0 2 4 6 8 10
−0.1
0
0.1
0.2
0.3
acc ang rel calcolata dal modello
[s]
[rad
/s2 ]
0 2 4 6 8 10−0.2
−0.1
0
0.1
0.2vel ang rel calcolata dal sistema optoelettr
[s]
[rad
/s]
0 2 4 6 8 10
−0.2
0
0.2
0.4
acc ang rel da sistema optoelettr
[s]
[rad
/s2 ]
Il confronto si mantiene ottimo per le velocita, mentre risulta piu scadente per le
accelerazioni.
120

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Dopo aver risolto la cinematica si e passato alla dinamica; gli output grafici relativi
alla dinamica sono le reazioni vincolari dovute alla presenza delle coppie cinematiche e le
coppie alle articolazioni generate dai vincoli di movimento.
Figura 7.9: Dinamica per l’articolazione della spalla
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 2 4 6 8 10
10
20
30
40
50
60
70
angolo relativo
[s]
[deg
]
0 2 4 6 8 10
40.4
40.6
40.8
41
41.2
41.4
Modulo della reaz vincolare
[s]
[N]
0 2 4 6 8 10
5
10
15
20
25
Coppia
[s]
[N*m
]
Inizialmente il braccio e la schiena sono quasi paralleli, e quindi la coppia presente
tra questi due corpi e quasi nulla; quando invece l’angolo relativo e al valore massimo, la
coppia relativa e massima anch’essa. Per quanto riguarda il modulo delle reazioni vincolari,
invece, questo oscilla attorno ad un valore di circa 41 N. La stessa situazione si ripropone
per il gomito, in cui pero il valore della coppia e piu basso (la variazione angolare e piu
contenuta) mentre il modulo della reazione vincolare vale circa 63 N.
121
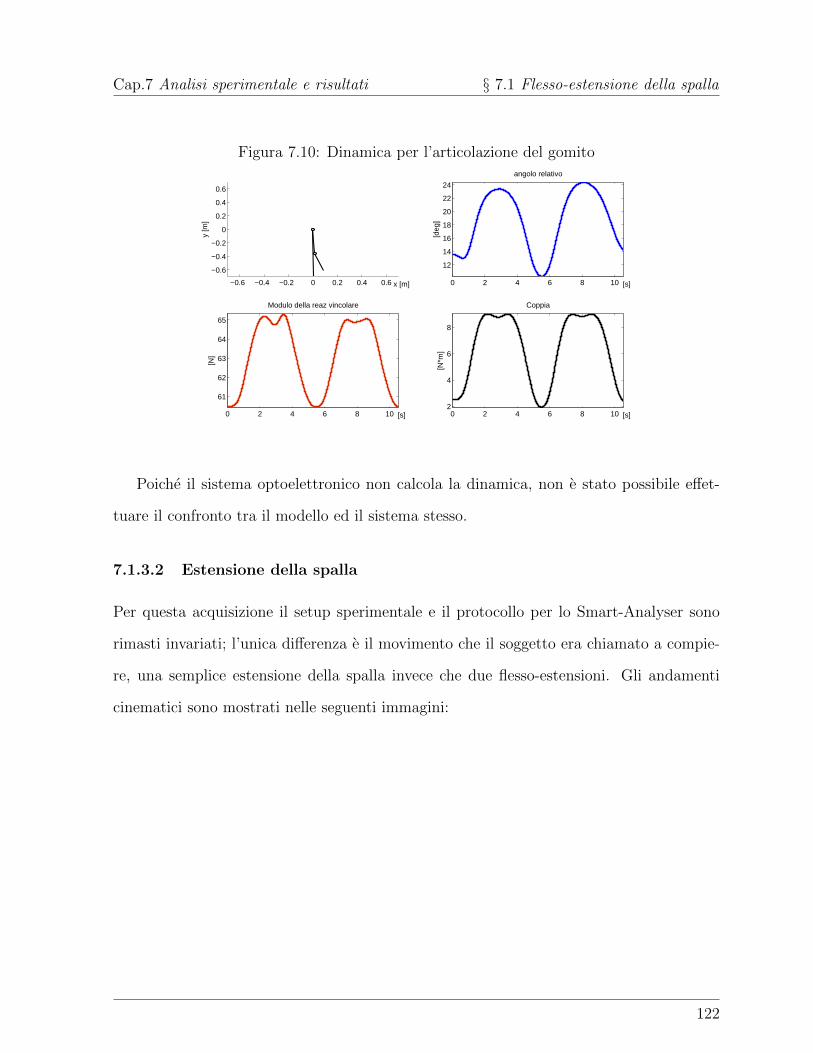
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.10: Dinamica per l’articolazione del gomito
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 2 4 6 8 10
12
14
16
18
20
22
24
angolo relativo
[s]
[deg
]
0 2 4 6 8 10
61
62
63
64
65
Modulo della reaz vincolare
[s]
[N]
0 2 4 6 8 102
4
6
8
Coppia
[s]
[N*m
]
Poiche il sistema optoelettronico non calcola la dinamica, non e stato possibile effet-
tuare il confronto tra il modello ed il sistema stesso.
7.1.3.2 Estensione della spalla
Per questa acquisizione il setup sperimentale e il protocollo per lo Smart-Analyser sono
rimasti invariati; l’unica differenza e il movimento che il soggetto era chiamato a compie-
re, una semplice estensione della spalla invece che due flesso-estensioni. Gli andamenti
cinematici sono mostrati nelle seguenti immagini:
122
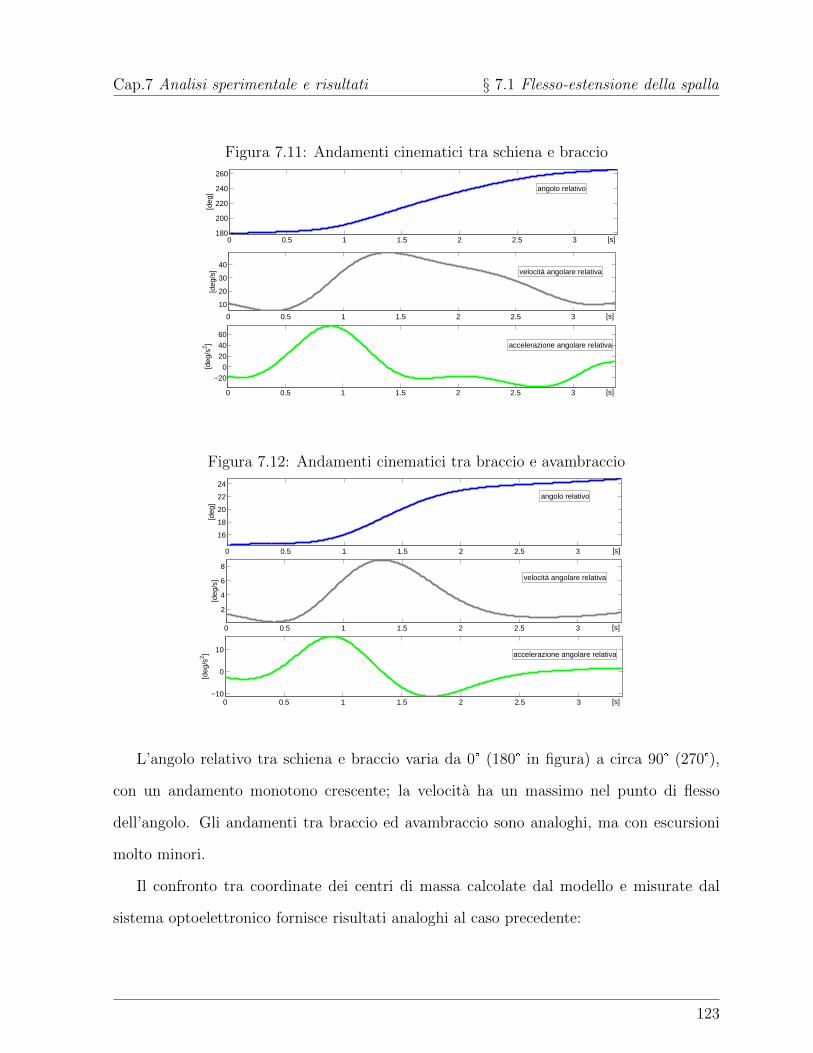
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.11: Andamenti cinematici tra schiena e braccio
0 0.5 1 1.5 2 2.5 3180
200
220
240
260
angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3
10
20
30
40velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3
−20
0
20
40
60accelerazione angolare relativa
[s]
[deg
/s2 ]
Figura 7.12: Andamenti cinematici tra braccio e avambraccio
0 0.5 1 1.5 2 2.5 3
16
18
20
22
24
angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3
2
4
6
8
velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3−10
0
10accelerazione angolare relativa
[s]
[deg
/s2 ]
L’angolo relativo tra schiena e braccio varia da 0° (180° in figura) a circa 90° (270°),
con un andamento monotono crescente; la velocita ha un massimo nel punto di flesso
dell’angolo. Gli andamenti tra braccio ed avambraccio sono analoghi, ma con escursioni
molto minori.
Il confronto tra coordinate dei centri di massa calcolate dal modello e misurate dal
sistema optoelettronico fornisce risultati analoghi al caso precedente:
123

Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.13: Confronto coordinate braccio
0 0.5 1 1.5 2 2.5 30
0.05
0.1
0.15
coord x baricentro calcolata dal modello
[s]
[m]
0 0.5 1 1.5 2 2.5 3
−0.15
−0.1
−0.05
coord y baricentro calcolata dal modello
[s]
[m]
0 0.5 1 1.5 2 2.5 30
0.05
0.1
coord x baricentro da sistema optoelettr
[s]
[m]
0 0.5 1 1.5 2 2.5 3
−0.16
−0.14
−0.12
−0.1
−0.08
−0.06
−0.04coord y baricentro da sistema optoelettr
[s]
[m]
Anche qui il confronto fornisce un ottimo riscontro; non solo, la coordinata del bari-
centro dell’avambraccio viene perduta dal sistema optoelettronico dopo circa 1.2 secondi
di acquisizione. Il modello riesce comunque, interpolando l’andamento a disposizione, a
calcolare la parte di curva mancante:
Figura 7.14: Confronto coordinate avambraccio
0 0.5 1 1.5 2 2.5 3
0.1
0.2
0.3
0.4
coord x baricentro calcolata dal modello
[s]
[m]
0 0.5 1 1.5 2 2.5 3
−0.4
−0.3
−0.2
−0.1
0
coord y baricentro calcolata dal modello
[s]
[m]
0 0.5 1 1.5 2 2.5 3
0.1
0.2
0.3
0.4
coord x baricentro da sistema optoelettr
[s]
[m]
0 0.5 1 1.5 2 2.5 3
−0.4
−0.3
−0.2
−0.1
coord y baricentro da sistema optoelettr
[s]
[m]
Si mostrano anche gli andamenti delle velocita ed accelerazioni computate e misurate:
124
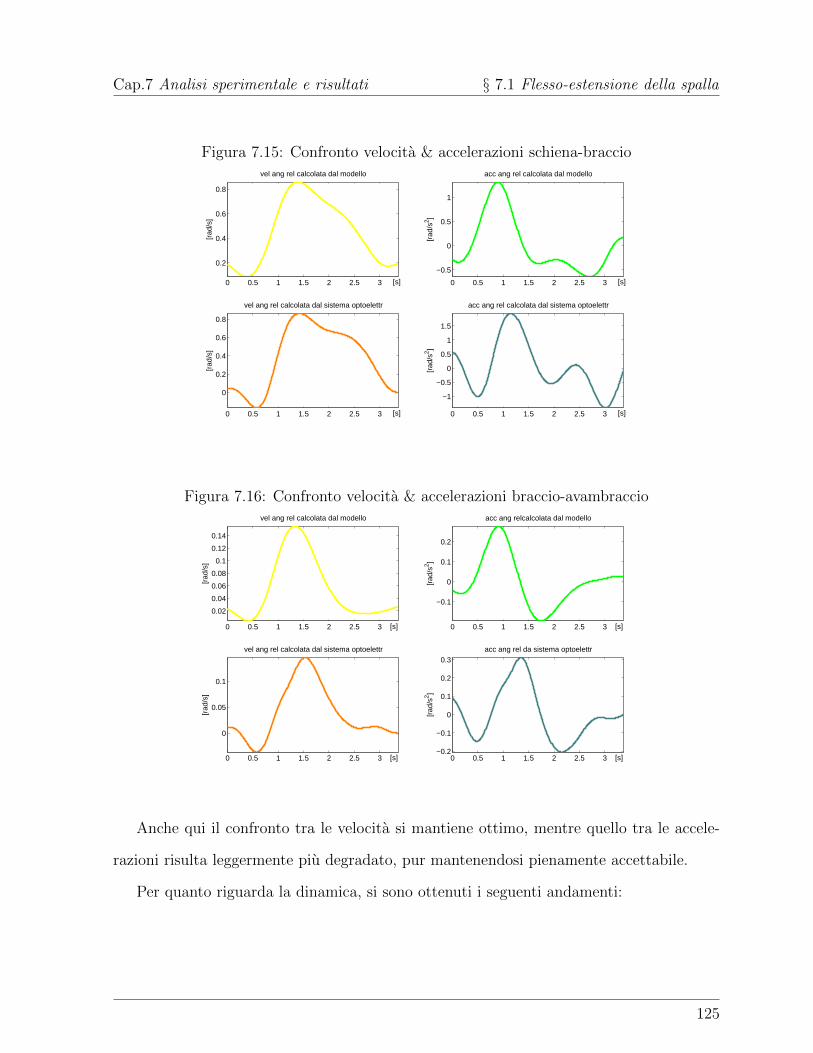
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.15: Confronto velocita & accelerazioni schiena-braccio
0 0.5 1 1.5 2 2.5 3
0.2
0.4
0.6
0.8
vel ang rel calcolata dal modello
[s]
[rad
/s]
0 0.5 1 1.5 2 2.5 3
−0.5
0
0.5
1
acc ang rel calcolata dal modello
[s]
[rad
/s2 ]
0 0.5 1 1.5 2 2.5 3
0
0.2
0.4
0.6
0.8
vel ang rel calcolata dal sistema optoelettr
[s]
[rad
/s]
0 0.5 1 1.5 2 2.5 3
−1
−0.5
0
0.5
1
1.5
acc ang rel calcolata dal sistema optoelettr
[s]
[rad
/s2 ]
Figura 7.16: Confronto velocita & accelerazioni braccio-avambraccio
0 0.5 1 1.5 2 2.5 3
0.02
0.04
0.06
0.08
0.1
0.12
0.14
vel ang rel calcolata dal modello
[s]
[rad
/s]
0 0.5 1 1.5 2 2.5 3
−0.1
0
0.1
0.2
acc ang relcalcolata dal modello
[s]
[rad
/s2 ]
0 0.5 1 1.5 2 2.5 3
0
0.05
0.1
vel ang rel calcolata dal sistema optoelettr
[s]
[rad
/s]
0 0.5 1 1.5 2 2.5 3−0.2
−0.1
0
0.1
0.2
0.3acc ang rel da sistema optoelettr
[s]
[rad
/s2 ]
Anche qui il confronto tra le velocita si mantiene ottimo, mentre quello tra le accele-
razioni risulta leggermente piu degradato, pur mantenendosi pienamente accettabile.
Per quanto riguarda la dinamica, si sono ottenuti i seguenti andamenti:
125
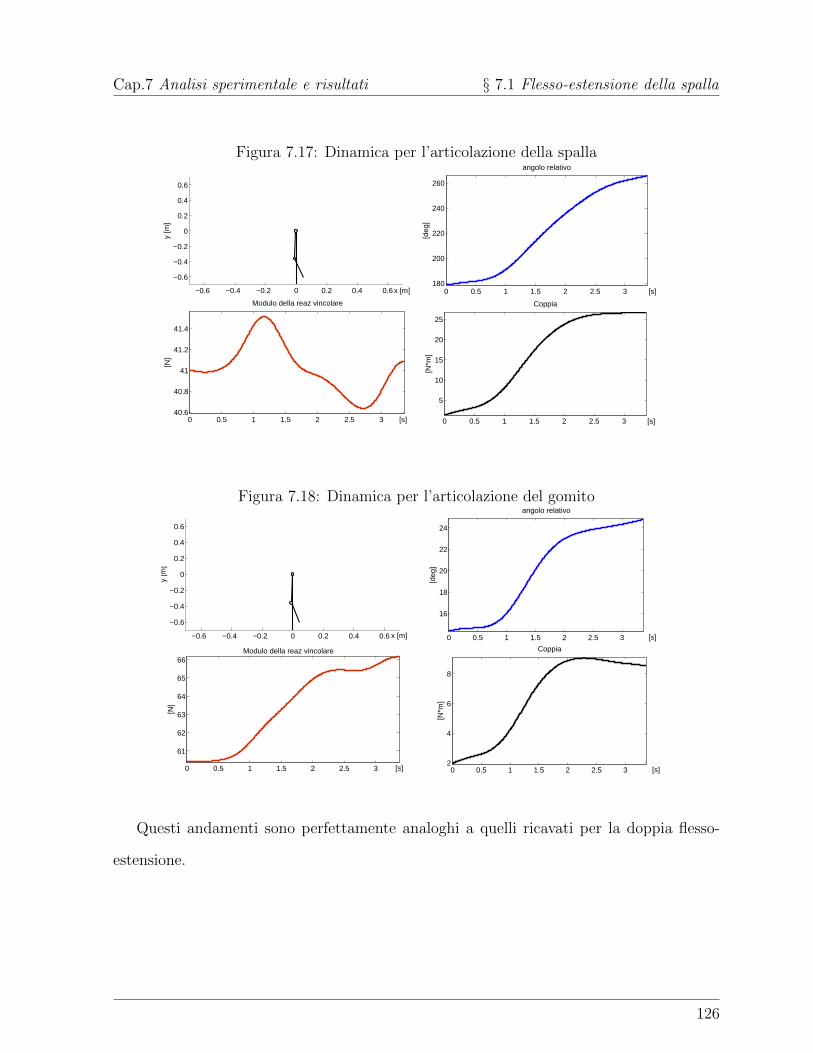
Cap.7 Analisi sperimentale e risultati § 7.1 Flesso-estensione della spalla
Figura 7.17: Dinamica per l’articolazione della spalla
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 0.5 1 1.5 2 2.5 3180
200
220
240
260
angolo relativo
[s]
[deg
]0 0.5 1 1.5 2 2.5 3
40.6
40.8
41
41.2
41.4
Modulo della reaz vincolare
[s]
[N]
0 0.5 1 1.5 2 2.5 3
5
10
15
20
25
Coppia
[s][N
*m]
Figura 7.18: Dinamica per l’articolazione del gomito
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 0.5 1 1.5 2 2.5 3
16
18
20
22
24
angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3
61
62
63
64
65
66Modulo della reaz vincolare
[s]
[N]
0 0.5 1 1.5 2 2.5 32
4
6
8
Coppia
[s]
[N*m
]
Questi andamenti sono perfettamente analoghi a quelli ricavati per la doppia flesso-
estensione.
126

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
7.2 Flesso-estensione del ginocchio
7.2.1 Setup sperimentale
In questa serie di acquisizioni i corpi presi in esame sono stati la schiena, la coscia e la
gamba destri. Il soggetto era chiamato a compiere, sdraiato su di un tavolo in posizione
prona, una flesso-estensione del ginocchio; la scelta di questa posizione e stata dettata
dall’esigenza di non interferire con il monitoraggio del segnale elettromiografico, compri-
mendo le sonde. Si voleva prelevare, infatti, il segnale elettromiografico proveniente dai
seguenti cinque muscoli:
� vasto mediale
� semitendinoso
� gastrocnemio mediale
� gastrocnemio laterale
� bicipite femorale breve
Una volta posizionati gli elettrodi secondo le raccomandazioni del SENIAM [2], poiche
gli elettrodi del semitendinoso e del bicipite femorale andavano posizionati nella porzione
posteriore della coscia, per evitare di schiacciare le corrispondenti sonde si e dovuto far
sdraiare il soggetto in posizione prona.
Per quanto riguarda il posizionamento dei markers, invece, sono stati posti su: fronte,
c7, acromion destro e sinistro, spina iliaca superiore posteriore destra e sinistra, trocantere
destro, ginocchio interno ed esterno destro, caviglia interna ed esterna destra.
127

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Figura 7.19: Posizione markers per flesso-estensione ginocchio
Per calibrare il sistema si e acquisita la posizione del s.d.r. assoluto per 6.6 secondi,
mentre il volume di lavoro e stato spazzolato con il wand per 146 secondi. In tabella sono
riportati i risultati della calibrazione:
Tabella 7.2: Calibrazione flesso-estensione ginocchio
3D reconstruction [mm] Mean Standard DeviationWand 0.247 0.224
2D residual [pixel] Mean Standard DeviationCamera 1 0.121 0.094Camera 2 0.087 0.055Camera 3 0.094 0.068Camera 4 0.090 0.058Camera 5 0.164 0.151Camera 6 0.132 0.085
Dopo aver acquisito la Massima Contrazione Volontaria (MCV) per tutti i muscoli, si
e passato ad effettuare le acquisizioni.
Il soggetto era chiamato a svolgere delle flesso-estensioni del ginocchio destro da po-
sizione sdraiata e prona cercando di mantenere la schiena ferma e il movimento il piu
possibile nel piano sagittale. Si sono eseguite due acquisizioni:
128
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
� una doppia flesso-estensione, di durata 8.48 secondi;
� una flesso-estensione, durata 5.3 secondi.
7.2.2 Modellazione
Dopo aver acquisito le posizioni nel tempo dei markers ed aver effettuato il tracking neces-
sario per assegnare i markers, si e creato un protocollo nello Smart-Analyzer per generare
le grandezze in input al modello:
� baricentro schiena come nuovo punto tra marker c7 e marker trocantere destro;
� baricentro coscia destra come nuovo punto tra marker trocantere destro e punto
medio tra i due markers applicati sul ginocchio destro;
� baricentro gamba come nuovo punto tra punto medio tra i due markers applicati sul
ginocchio destro e punto medio tra i due markers applicati sulla caviglia destra.
� nuovo punto, definito come punto medio tra spina iliaca destra e sinistra;
� vettore tra c7 e proiezione punto medio tra le spine iliache sul piano della terra (piano
X-Z s.d.r. assoluto);
� vettore tra c7 e fronte;
� piano sagittale come piano definito dai due vettori precedenti; il motivo per cui si e
scelto di definire il vettore tra c7 e la proiezione del punto medio tra le spine iliache
sul piano della terra e stato che l’angolo tra c7-fronte e c7-punto medio spine iliache
era basso, circa pari a 30°, e di conseguenza il piano che veniva generato era troppo
soggetto ad errore.
� vettore coscia come vettore tra trocantere destro e punto medio tra i markers appli-
cati sul ginocchio destro;
129
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
� vettore gamba come vettore tra punto medio tra i markers applicati sul ginocchio
destro e punto medio tra i due markers applicati sulla caviglia destra;
� vettore schiena come vettore tra c7 e trocantere destro.
� proiezione trocantere destro su piano sagittale;
� proiezione baricentro schiena su piano sagittale;
� proiezione baricentro coscia su piano sagittale;
� proiezione baricentro gamba su piano sagittale;
� proiezione asse x s.d.r. assoluto (lab i) su piano sagittale;
� proiezione asse y s.d.r. assoluto (lab j ) su piano sagittale;
� prodotto vettoriale tra proiezione lab i e proiezione lab j.
� nuovo s.d.r. relativo con origine nella proiezione del trocantere destro sul piano
sagittale e con assi pari a:
– asse x: proiezione lab i su piano sagittale;
– asse y: proiezione lab j su piano sagittale;
– asse z: prodotto vettoriale tra proiezione lab i e proiezione lab j.
� proiezione baricentro coscia su piano sagittale espresso nel s.d.r. relativo ⇒ q04, q05
� proiezione baricentro gamba su piano sagittale espresso nel s.d.r. relativo ⇒ q07, q08
� angolo tra asse x s.d.r. relativo e vettore proiezione coscia ⇒ q06
� angolo tra asse x s.d.r. relativo e vettore proiezione gamba ⇒ q09
130

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
� angolo tra vettore proiezione schiena e vettore proiezione coscia ⇒ driving1
� angolo tra vettore proiezione coscia e vettore proiezione gamba ⇒ driving2
� lunghezza vettore proiezione schiena ⇒ lunghezza iniziale schiena
� lunghezza vettore proiezione coscia ⇒ lunghezza iniziale braccio
� lunghezza vettore proiezione gamba ⇒ lunghezza iniziale avambraccio
Figura 7.20: Schema protocollo flesso-estensione ginocchio
Xrel
Zrel
Yrel
labi
labj
labk
driv1
driv2
schiena
gamba
coscia
piano di appoggio
Per quanto riguarda la matrice delle forze, e stata considerata una forza peso costante
sulla coscia e sulla gamba; a questa forza peso e stata aggiunta una forza contraria che
annullava l’effetto della gravita negli intervalli dell’acquisizione in cui la coscia e la gamba
erano appoggate al piano, e che variava con legge quadratica fino ad annullarsi quando
la coscia e la gamba non erano piu appoggiate al piano. In questo modo si e riuscito ad
introdurre gradatamente l’azione della forza di gravita. La forza e stata introdotta con
un case in Timeforcevar ; le parti di codice in cui sono stati specificati gli andamenti della
forza sono:
131
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
1 case (37) % a c q 3 f o r z a marco 22 d i c corpo 3
2 i f t<=0.5
3 Fp(1) =0. ;
4 Fp(2) =(9.8) *mi (3) *(−1.4142* t +0.7071) ˆ2 ;
5 torque =0. ;
6 e l s e i f t>4.5
7 Fp(1) =0. ;
8 Fp(2) =(9.8) *mi (3) * (0 .5590* t −2.5155) ˆ2 ;
9 torque =0. ;
10 e l s e
11 Fp(1) =0. ;
12 Fp(2) =0. ;
13 torque =0. ;
14 end
per la flesso-estensione del ginocchio e
1 case (5 ) % acq 4
2 i f t<=0.300
3 Fp(1) =0. ;
4 Fp(2) =(9.8) *mi (3) *(−2.3570* t +0.7071) ˆ2 ;
5 torque =0. ;
6 e l s e
7 Fp(1) =0. ;
8 Fp(2) =0. ;
9 torque =0. ;
10 end
per la doppia flesso-estensione.
132

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
I rimanenti input per il modello erano i parametri antropometrici, calcolati sempre a
partire da [23] sulla base della conoscenza del peso del soggetto in esame (73 kg), e gli
input per la funzione derivative dwt e derivative cwt ; si e scelto di utilizzare derivative dwt
con una spline a sei punti come wavelet function nel caso della flesso-estensione singola,
mentre una spline a 38 punti con derivative cwt nel caso della doppia flesso-estensione.
7.2.3 Risultati
7.2.3.1 Doppia flesso-estensione del ginocchio
Nelle due figure seguenti e mostrato l’andamento degli angoli relativi tra corpi adiacenti e
delle loro derivate prima e seconda:
Figura 7.21: Andamenti cinematici tra schiena e coscia
0 1 2 3 4 5 6 7 82
4
6
8
10angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6 7 8−4
−2
0
2
4
6
velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8−10
−5
0
5
accelerazione angolare relativa
[s]
[deg
/s2 ]
133
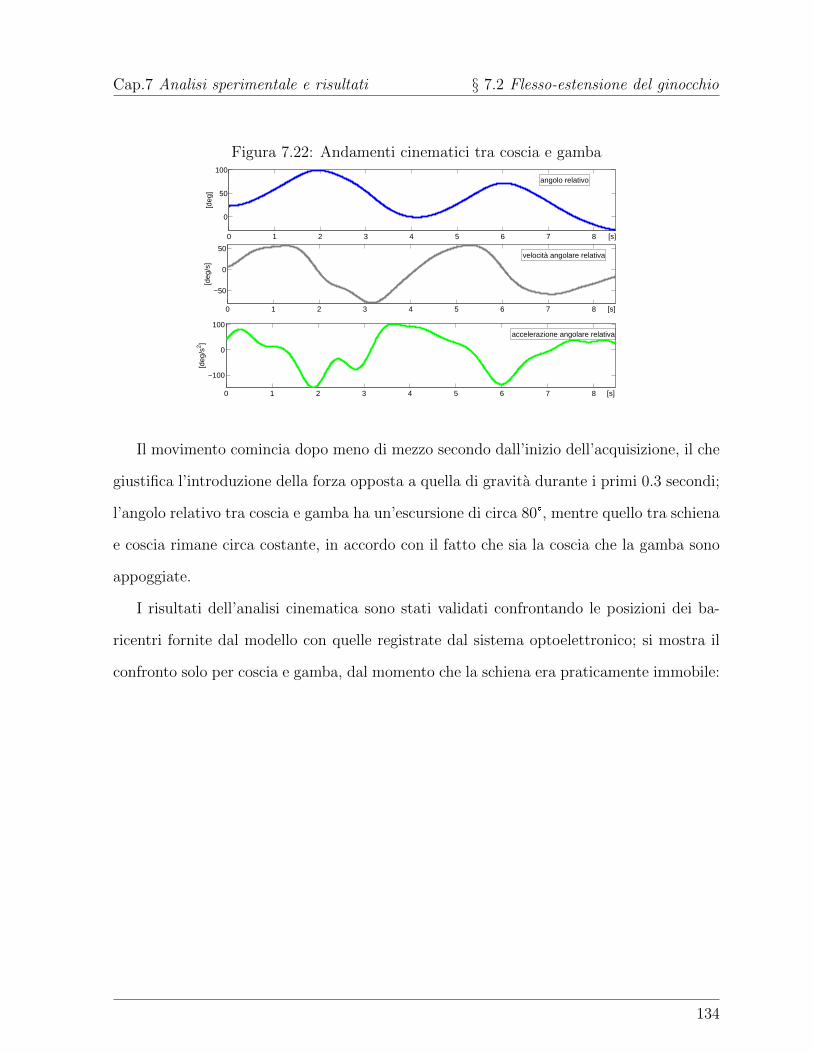
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Figura 7.22: Andamenti cinematici tra coscia e gamba
0 1 2 3 4 5 6 7 8
0
50
100angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6 7 8
−50
0
50velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8
−100
0
100accelerazione angolare relativa
[s]
[deg
/s2 ]
Il movimento comincia dopo meno di mezzo secondo dall’inizio dell’acquisizione, il che
giustifica l’introduzione della forza opposta a quella di gravita durante i primi 0.3 secondi;
l’angolo relativo tra coscia e gamba ha un’escursione di circa 80°, mentre quello tra schiena
e coscia rimane circa costante, in accordo con il fatto che sia la coscia che la gamba sono
appoggiate.
I risultati dell’analisi cinematica sono stati validati confrontando le posizioni dei ba-
ricentri fornite dal modello con quelle registrate dal sistema optoelettronico; si mostra il
confronto solo per coscia e gamba, dal momento che la schiena era praticamente immobile:
134
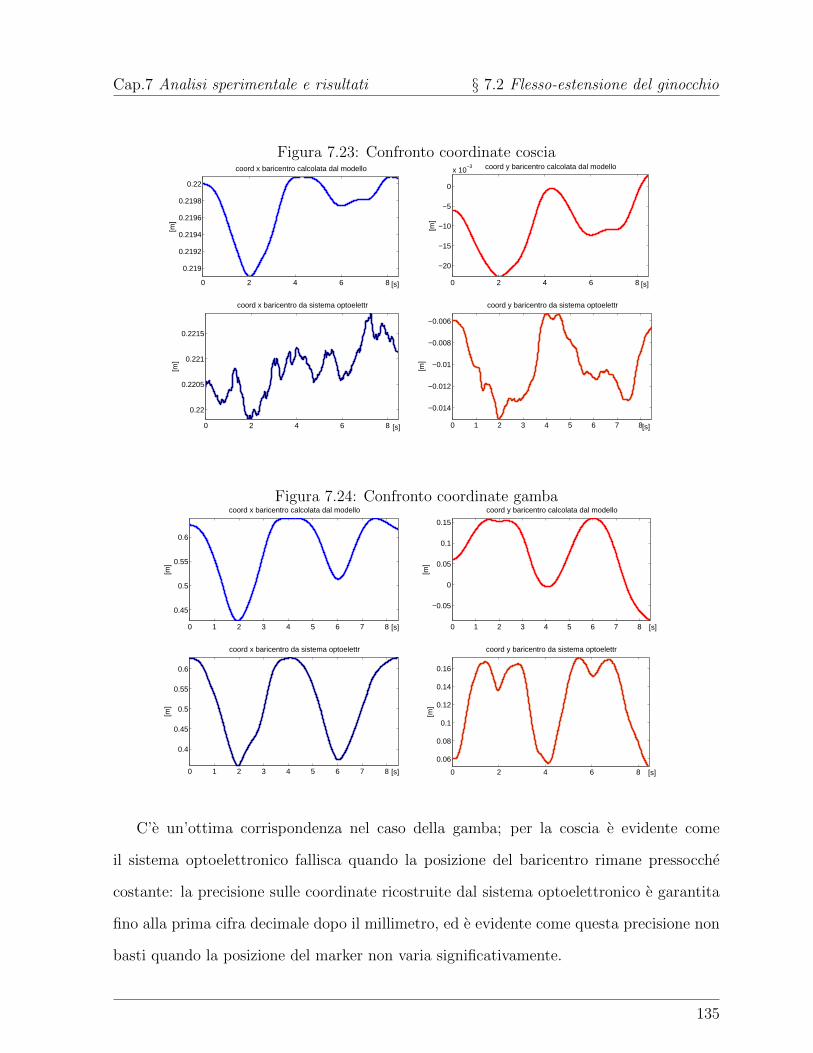
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Figura 7.23: Confronto coordinate coscia
0 2 4 6 8
0.219
0.2192
0.2194
0.2196
0.2198
0.22
coord x baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8
−20
−15
−10
−5
0
x 10−3 coord y baricentro calcolata dal modello
[s]
[m]
0 2 4 6 8
0.22
0.2205
0.221
0.2215
coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4 5 6 7 8
−0.014
−0.012
−0.01
−0.008
−0.006
coord y baricentro da sistema optoelettr
[s][m
]
Figura 7.24: Confronto coordinate gamba
0 1 2 3 4 5 6 7 8
0.45
0.5
0.55
0.6
coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 6 7 8
−0.05
0
0.05
0.1
0.15
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 6 7 8
0.4
0.45
0.5
0.55
0.6
coord x baricentro da sistema optoelettr
[s]
[m]
0 2 4 6 8
0.06
0.08
0.1
0.12
0.14
0.16
coord y baricentro da sistema optoelettr
[s]
[m]
C’e un’ottima corrispondenza nel caso della gamba; per la coscia e evidente come
il sistema optoelettronico fallisca quando la posizione del baricentro rimane pressocche
costante: la precisione sulle coordinate ricostruite dal sistema optoelettronico e garantita
fino alla prima cifra decimale dopo il millimetro, ed e evidente come questa precisione non
basti quando la posizione del marker non varia significativamente.
135

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Lo stesso confronto e stato fatto per le velocita e per le accelerazioni calcolate e
misurate:
Figura 7.25: Confronto velocita & accelerazioni schiena-coscia
0 1 2 3 4 5 6 7 8
−2
0
2
4
vel ang rel calcolata dal modello
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8
−5
0
5
acc ang rel calcolata dal modello
[s]
[deg
/s2 ]
0 1 2 3 4 5 6 7 8−4
−2
0
2
4
6
vel ang rel calcolata dal sistema optoelettr
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8
−10
−5
0
5
10
acc ang rel calcolata dal sistema optoelettr
[s]
[deg
/s2 ]
Figura 7.26: Confronto velocita & accelerazioni coscia-gamba
0 1 2 3 4 5 6 7 8
−60
−40
−20
0
20
40
vel ang rel calcolata dal modello
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8
−100
−50
0
50
100acc ang rel calcolata dal modello
[s]
[deg
/s2 ]
0 1 2 3 4 5 6 7 8
−50
0
50
vel ang rel calcolata dal sistema optoelettr
[s]
[deg
/s]
0 1 2 3 4 5 6 7 8
−200
−150
−100
−50
0
50
100
acc ang rel da sistema optoelettr
[s]
[deg
/s2 ]
Anche qui il confronto delle velocita e delle accelerazioni e buono: l’andamento viene
conservato dal modello, anche se le scale sono diverse.
Si passa ora ad analizzare gli output dinamici.
136
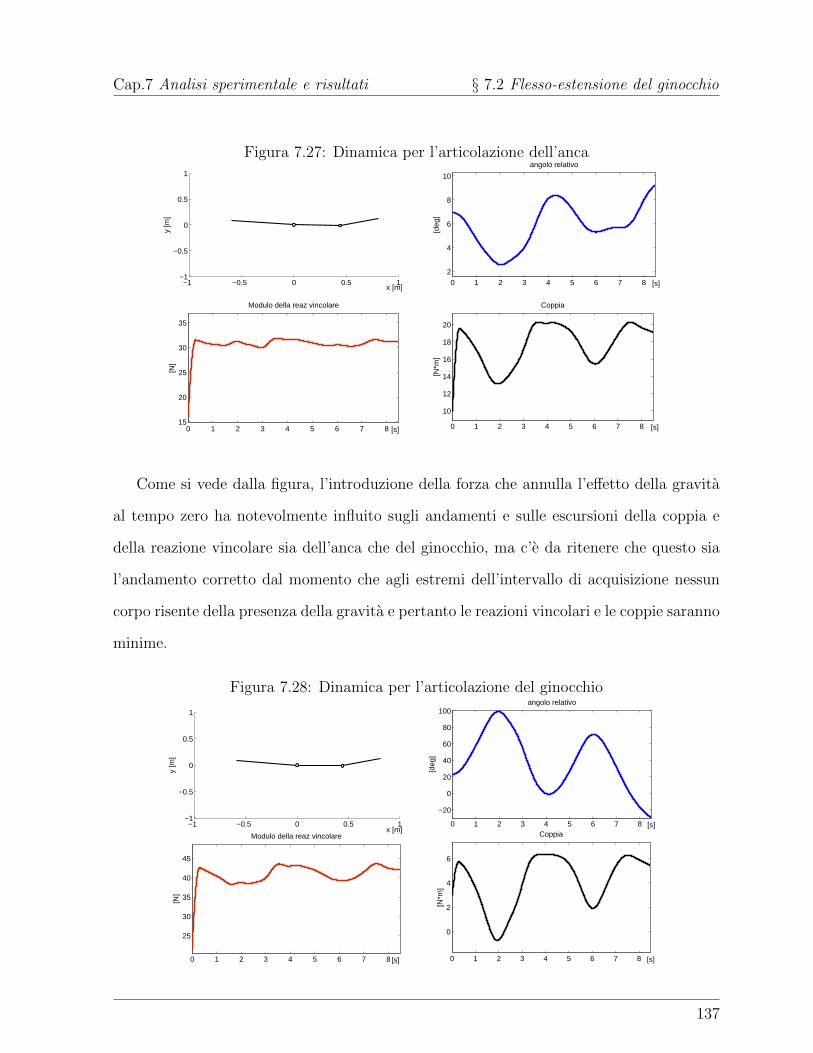
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Figura 7.27: Dinamica per l’articolazione dell’anca
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
x [m]
y [m
]
0 1 2 3 4 5 6 7 8
2
4
6
8
10
angolo relativo
[s]
[deg
]0 1 2 3 4 5 6 7 8
15
20
25
30
35
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 5 6 7 8
10
12
14
16
18
20
Coppia
[s][N
*m]
Come si vede dalla figura, l’introduzione della forza che annulla l’effetto della gravita
al tempo zero ha notevolmente influito sugli andamenti e sulle escursioni della coppia e
della reazione vincolare sia dell’anca che del ginocchio, ma c’e da ritenere che questo sia
l’andamento corretto dal momento che agli estremi dell’intervallo di acquisizione nessun
corpo risente della presenza della gravita e pertanto le reazioni vincolari e le coppie saranno
minime.
Figura 7.28: Dinamica per l’articolazione del ginocchio
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
x [m]
y [m
]
0 1 2 3 4 5 6 7 8
−20
0
20
40
60
80
100angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6 7 8
25
30
35
40
45
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 5 6 7 8
0
2
4
6
Coppia
[s]
[N*m
]
137

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
7.2.3.2 Flesso-estensione del ginocchio
Nelle due figure seguenti e mostrato l’andamento degli angoli relativi tra corpi adiacenti e
delle loro derivate prima e seconda:
Figura 7.29: Andamenti cinematici tra schiena e coscia
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 55
6
7angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−2
0
2
velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−5
0
5 accelerazione angolare relativa
[s]
[deg
/s2 ]
Figura 7.30: Andamenti cinematici tra coscia e gamba
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 520
40
60
80
100angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−50
0
50
velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−150
−100
−50
0
50
accelerazione angolare relativa
[s]
[deg
/s2 ]
Il movimento comincia dopo circa mezzo secondo dall’inizio dell’acquisizione, il che
giustifica l’introduzione della forza opposta a quella di gravita durante tale intervallo;
138
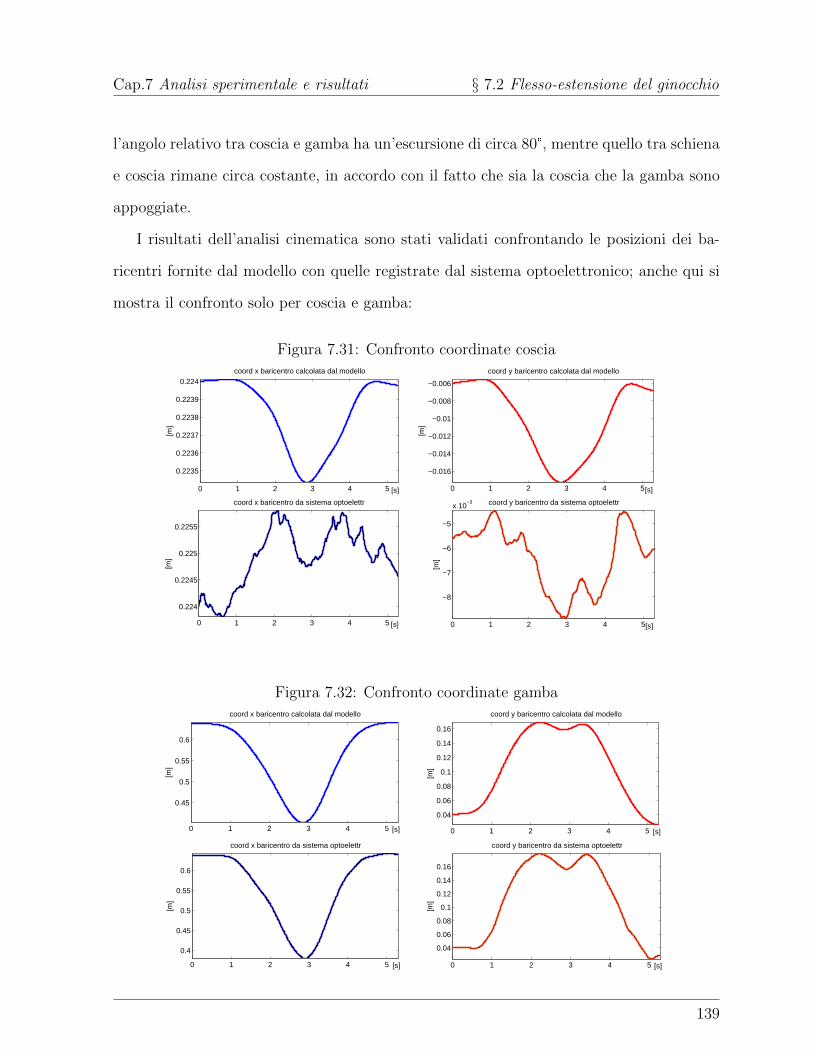
Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
l’angolo relativo tra coscia e gamba ha un’escursione di circa 80°, mentre quello tra schiena
e coscia rimane circa costante, in accordo con il fatto che sia la coscia che la gamba sono
appoggiate.
I risultati dell’analisi cinematica sono stati validati confrontando le posizioni dei ba-
ricentri fornite dal modello con quelle registrate dal sistema optoelettronico; anche qui si
mostra il confronto solo per coscia e gamba:
Figura 7.31: Confronto coordinate coscia
0 1 2 3 4 5
0.2235
0.2236
0.2237
0.2238
0.2239
0.224coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5
−0.016
−0.014
−0.012
−0.01
−0.008
−0.006
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5
0.224
0.2245
0.225
0.2255
coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4 5
−8
−7
−6
−5
x 10−3 coord y baricentro da sistema optoelettr
[s]
[m]
Figura 7.32: Confronto coordinate gamba
0 1 2 3 4 5
0.45
0.5
0.55
0.6
coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5
0.04
0.06
0.08
0.1
0.12
0.14
0.16
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5
0.4
0.45
0.5
0.55
0.6
coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4 5
0.04
0.06
0.08
0.1
0.12
0.14
0.16
coord y baricentro da sistema optoelettr
[s]
[m]
139

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Come nell’acquisizione precedente, la corrispondenza tra coordinate calcolate e misu-
rate e ottima nel caso della gamba; per la coscia, come sopra, il sistema optoelettronico
da risultati non realistici.
Lo stesso confronto e stato fatto per le velocita e per le accelerazioni calcolate e
misurate:
Figura 7.33: Confronto velocita & accelerazioni schiena-coscia
0 1 2 3 4 5
−2
−1
0
1
2
vel ang rel calcolata dal modello
[s]
[deg
/s]
0 1 2 3 4 5
−6
−4
−2
0
2
4
acc ang rel calcolata dal modello
[s]
[deg
/s2 ]
0 1 2 3 4 5−3
−2
−1
0
1
2
3
4vel ang rel calcolata dal sistema optoelettr
[s]
[deg
/s]
0 1 2 3 4 5
−10
−5
0
5
10acc ang rel calcolata dal sistema optoelettr
[s]
[deg
/s2 ]
Figura 7.34: Confronto velocita & accelerazioni coscia-gamba
0 1 2 3 4 5
−60
−40
−20
0
20
40
vel ang rel calcolata dal modello
[s]
[deg
/s]
0 1 2 3 4 5−150
−100
−50
0
50
acc ang rel calcolata dal modello
[s]
[deg
/s2 ]
0 1 2 3 4 5
−60
−40
−20
0
20
40
60
vel ang rel calcolata dal sistema optoelettr
[s]
[deg
/s]
0 1 2 3 4 5−200
−150
−100
−50
0
50
100
acc ang rel da sistema optoelettr
[s]
[deg
/s2 ]
140

Cap.7 Analisi sperimentale e risultati § 7.2 Flesso-estensione del ginocchio
Anche qui il confronto delle velocita e delle accelerazioni e buono: l’andamento viene
conservato dal modello, anche se le scale sono diverse.
Si passa ora ad analizzare gli output dinamici.
Figura 7.35: Dinamica per l’articolazione dell’anca
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
x [m]
y [m
]
0 1 2 3 4 5
5
5.5
6
6.5
7
7.5
8angolo relativo
[s]
[deg
]
0 1 2 3 4 5
20
25
30
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 510
12
14
16
18
20
Coppia
[s]
[N*m
]
Come si vede dalla figura, l’introduzione della forza che annulla l’effetto della gravita
al tempo zero e al tempo finale ha notevolmente influito sugli andamenti della coppia e
della reazione vincolare sia dell’anca che del ginocchio.
Figura 7.36: Dinamica per l’articolazione del ginocchio
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
x [m]
y [m
]
0 1 2 3 4 5
20
40
60
80
100
angolo relativo
[s]
[deg
]
0 1 2 3 4 5
25
30
35
40
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 5
−1
0
1
2
3
4
5
6
Coppia
[s]
[N*m
]
141

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
7.3 Flesso-estensione del gomito
7.3.1 Setup sperimentale
In questa serie di acquisizioni i corpi presi in esame sono stati la schiena, l’avambraccio
ed il braccio destri. Il soggetto era chiamato a compiere, in posizione seduta, una flesso-
estensione del gomito ad una velocita ritenuta normale dal soggetto. I markers sono
stati posizionati sull’acromion destro e sinistro, sull’olecrano destro, sulle porzioni distali
dell’ulna e del radio, in corrispondenza della settima vertebra cervicale, sul manubrio e tra
L5 ed S1.
Figura 7.37: Posizione markers per flesso-estensione gomito
Per quanto attiene al prelevamento del segnale elettromiografico, sono stati registrati
i segnali provenienti dal deltoide (deltoideus anterior) e dal bicipite (biceps brachii caput
longus), mediante l’applicazione di due coppie di elettrodi sulla cute, posizionati seguendo
le Raccomandazioni Europee per l’Elettromiografia di Superficie [39, 2].
Per calibrare il sistema si e acquisita la posizione del s.d.r. assoluto per 6.5 secondi,
mentre il volume di lavoro, di dimensioni 3.85x1.87x4.73 m3 e stato spazzolato con il wand
per 150.2 secondi. In tabella sono riportati i risultati della calibrazione:
142

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Tabella 7.3: Calibrazione flesso-estensione gomito
3D reconstruction [mm] Mean Standard DeviationWand 0.394 0.464
2D residual [pixel] Mean Standard DeviationCamera 1 0.104 0.073Camera 2 0.083 0.055Camera 3 0.082 0.053Camera 4 0.079 0.052Camera 5 0.123 0.106Camera 6 0.119 0.090
Dopo aver acquisito la Massima Contrazione Volontaria (MCV) sia per il bicipite che
per il deltoide, si e passato ad effettuare le acquisizioni.
Il soggetto era chiamato a svolgere delle flesso-estensioni del gomito destro da posi-
zione seduta cercando di mantenere la schiena ferma e il movimento il piu possibile nel
piano sagittale. Sulla mano destra era applicato un peso di 3 kg, per aumentare lo sforzo
muscolare. Si sono eseguite tre acquisizioni:
� una doppia flesso-estensione, di durata 6.28 secondi;
� una flesso estensione, di 4.86 secondi;
� una flessione, durata 3.35 secondi.
7.3.2 Modellazione
Dopo aver acquisito le posizioni nel tempo dei markers ed aver effettuato il tracking neces-
sario per assegnare i markers, si e creato un protocollo nello Smart-Analyzer per generare
le grandezze da dare in input al modello:
� baricentro braccio destro come nuovo punto tra marker acromion destro e marker
olecrano destro;
143

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
� baricentro avambraccio destro come nuovo punto tra marker olecrano destro e punto
medio tra i due markers applicati sul polso destro;
� baricentro schiena come nuovo punto tra marker c7 e marker sacro (marker L5-S1).
� nuovo punto, definito come proiezione del marker su c7 sul piano terreno (piano X-Z
s.d.r. assoluto);
� nuovo punto, definito come proiezione del marker sul manubrio sul piano terreno;
� vettore tra c7 e sacro;
� vettore tra proiezione manubrio e proiezione c7 sul piano terreno;
� piano sagittale come piano definito dai due vettori precedenti.
� vettore braccio come vettore tra acromion destro ed olecrano destro;
� vettore avambraccio come vettore tra olecrano destro e punto medio tra i due markers
applicati sul polso destro;
� vettore schiena come vettore tra c7 e sacro.
� proiezione acromion destro su piano sagittale;
� proiezione baricentro braccio su piano sagittale;
� proiezione baricentro avambraccio su piano sagittale;
� proiezione -asse x s.d.r. assoluto (-lab i) su piano sagittale;
� proiezione asse y s.d.r. assoluto (lab j ) su piano sagittale;
� prodotto vettoriale tra proiezione -lab i e proiezione lab j.
144
Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
� nuovo s.d.r. relativo con origine nella proiezione dell’acromion destro sul piano
sagittale e con assi pari a:
– asse x: proiezione -lab i su piano sagittale;
– asse y: proiezione lab j su piano sagittale;
– asse z: prodotto vettoriale tra proiezione -lab i e proiezione lab j.
� proiezione baricentro braccio su piano sagittale espresso nel s.d.r. relativo⇒ q04, q05
� proiezione baricentro avambraccio su piano sagittale espresso nel s.d.r. relativo ⇒
q07, q08
� angolo tra asse x s.d.r. relativo e vettore proiezione braccio ⇒ q06
� angolo tra asse x s.d.r. relativo e vettore proiezione avambraccio ⇒ q09
� angolo tra proiezione -lab j e vettore proiezione braccio ⇒ driving1
� angolo tra vettore proiezione braccio e vettore proiezione avambraccio ⇒ driving2
� lunghezza vettore proiezione braccio ⇒ lunghezza iniziale braccio
� lunghezza vettore proiezione avambraccio ⇒ lunghezza iniziale avambraccio
145

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.38: Schema protocollo flesso-estensione gomito
Xrel
Zrel
Yrel
labi
labj
labk
driv1 driv2
schiena avambraccio
braccio
3 kg
Per quanto riguarda la matrice delle forze, e stata considerata una forza peso costante
sul braccio e sull’avambraccio, e un peso di 3 kg applicato sul punto piu distale dell’avam-
braccio (mano). Nel caso della doppia flesso-estensione si e fatto partire il movimento da
posizione appoggiata (braccio ed avambraccio scarichi), quindi alla forza di gravita si e
aggiunta una forza variabile con legge quadratica che al tempo t=0 annullava la forza di
gravita e che si esauriva entro il primo mezzo secondo, cioe entro l’inizio del movimento.
I rimanenti input per il modello erano i parametri antropometrici, calcolati a partire
da [23] (si veda il paragrafo 6.1) sulla base della conoscenza del peso del soggetto in esame,
e le posizioni iniziali della schiena. Queste non sono state prese a partire dalle posizioni
dei markers (proiezione baricentro schiena nel s.d.r. relativo) perche il telaio (la schiena)
nel modello e stato considerato fermo; per questo motivo le posizioni iniziali del baricentro
della schiena sono state fissate arbitrariamente, in accordo con le restanti posizioni iniziali
146
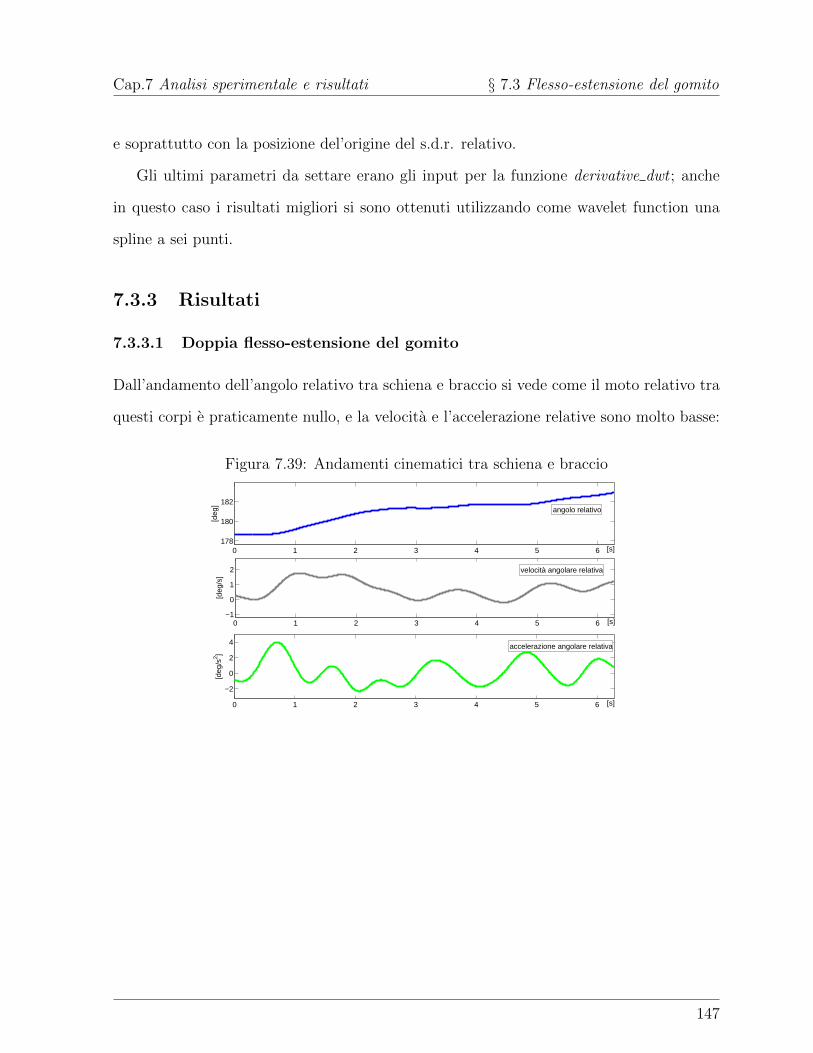
Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
e soprattutto con la posizione del’origine del s.d.r. relativo.
Gli ultimi parametri da settare erano gli input per la funzione derivative dwt ; anche
in questo caso i risultati migliori si sono ottenuti utilizzando come wavelet function una
spline a sei punti.
7.3.3 Risultati
7.3.3.1 Doppia flesso-estensione del gomito
Dall’andamento dell’angolo relativo tra schiena e braccio si vede come il moto relativo tra
questi corpi e praticamente nullo, e la velocita e l’accelerazione relative sono molto basse:
Figura 7.39: Andamenti cinematici tra schiena e braccio
0 1 2 3 4 5 6178
180
182angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6−1
0
1
2 velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6
−2
0
2
4 accelerazione angolare relativa
[s]
[deg
/s2 ]
147

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.40: Andamenti cinematici tra braccio e avambraccio
0 1 2 3 4 5 690
100
110
120
130angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6−40
−20
0
20
40velocità angolare relativa
[s]
[deg
/s]
0 1 2 3 4 5 6−100
−50
0
50accelerazione angolare relativa
[s]
[deg
/s2 ]
L’angolo tra braccio ed avambraccio, invece, ha un’escursione di circa 40°; il movi-
mento comincia dopo circa mezzo secondo, il che concorda con la scelta di annullare la
forza di gravita durante i primi 0.5 secondi. Le velocita e le accelerazioni relative sono
correttamente calcolate dalla funzione di differenziazione basata sulla trasformata wavelet.
I risultati dell’analisi cinematica sono stati validati confrontando le posizioni dei bari-
centri fornite dal modello con quelle registrate dal sistema optoelettronico:
Figura 7.41: Confronto coordinate braccio
0 1 2 3 4 5 60
2
4
6
8
10
12x 10
−3 coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 6
−0.1675
−0.1675
−0.1674
−0.1674
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 6
0
2
4
6
8
x 10−3 coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4 5 6
−0.167
−0.166
−0.165
−0.164
−0.163
−0.162
−0.161
coord y baricentro da sistema optoelettr
[s]
[m]
148
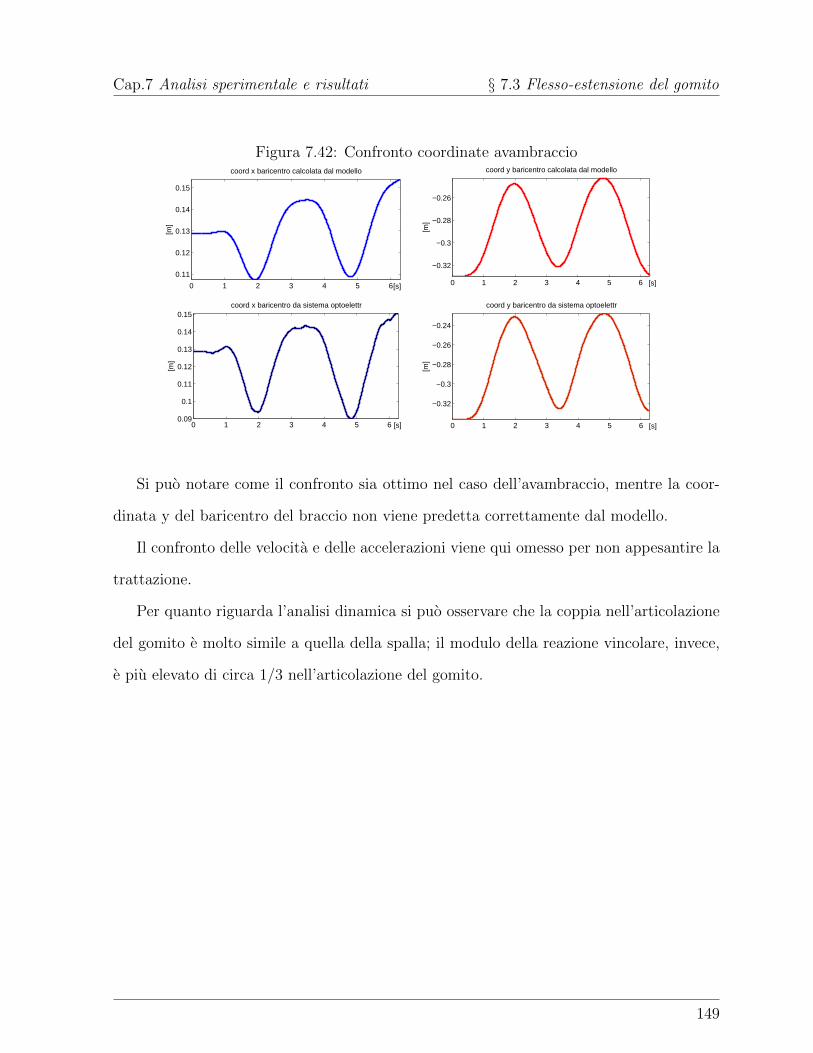
Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.42: Confronto coordinate avambraccio
0 1 2 3 4 5 6
0.11
0.12
0.13
0.14
0.15
coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 6
−0.32
−0.3
−0.28
−0.26
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4 5 60.09
0.1
0.11
0.12
0.13
0.14
0.15coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4 5 6
−0.32
−0.3
−0.28
−0.26
−0.24
coord y baricentro da sistema optoelettr
[s][m
]
Si puo notare come il confronto sia ottimo nel caso dell’avambraccio, mentre la coor-
dinata y del baricentro del braccio non viene predetta correttamente dal modello.
Il confronto delle velocita e delle accelerazioni viene qui omesso per non appesantire la
trattazione.
Per quanto riguarda l’analisi dinamica si puo osservare che la coppia nell’articolazione
del gomito e molto simile a quella della spalla; il modulo della reazione vincolare, invece,
e piu elevato di circa 1/3 nell’articolazione del gomito.
149

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.43: Dinamica per l’articolazione della spalla
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 1 2 3 4 5 6
178
179
180
181
182
183
angolo relativo
[s]
[deg
]0 1 2 3 4 5 6
25
30
35
40
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 5 6
5
6
7
8
9
10
11Coppia
[s]
[N*m
]
Figura 7.44: Dinamica per l’articolazione del gomito
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 1 2 3 4 5 690
100
110
120
130
angolo relativo
[s]
[deg
]
0 1 2 3 4 5 6
40
45
50
55
60
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4 5 6
5
6
7
8
9
10
Coppia
[s]
[N*m
]
7.3.3.2 Flesso-estensione del gomito
Questa acquisizione e stata effettuata su un soggetto diverso rispetto alla precedente; il
braccio e l’avambraccio sono carichi gia al tempo iniziale, quindi non e stata introdotta
nessuna forza correttiva della forza di gravita. L’angolo relativo tra schiena e braccio
150
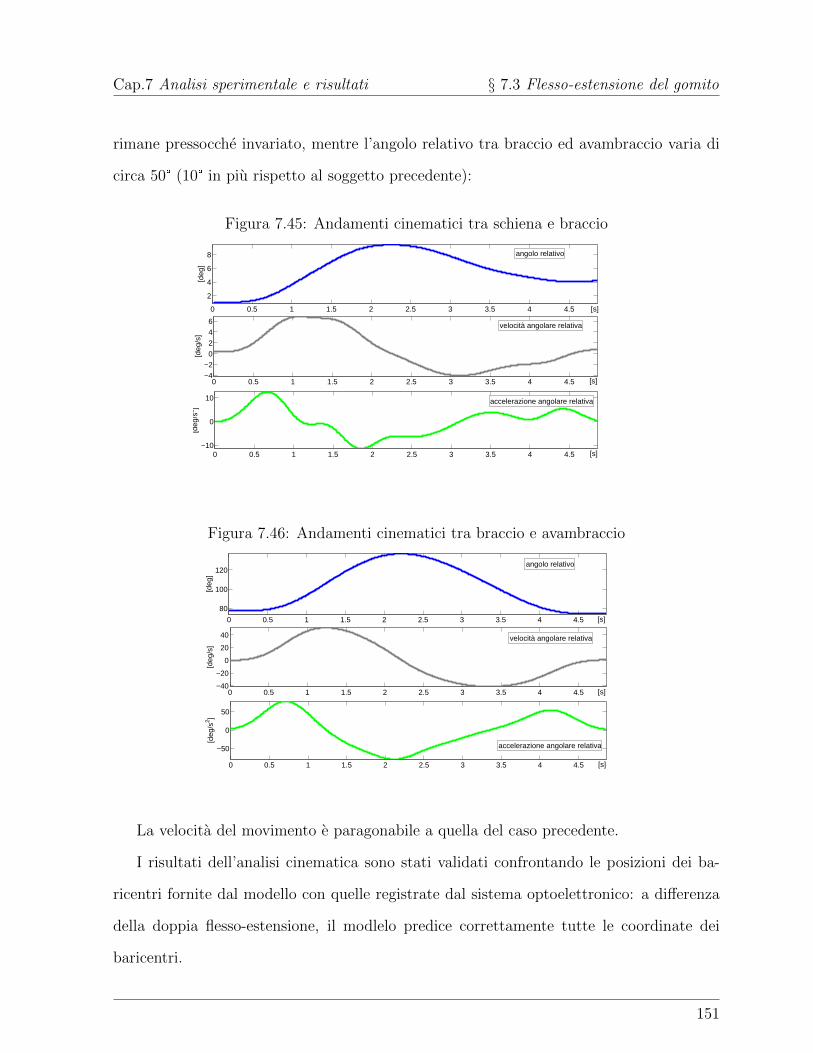
Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
rimane pressocche invariato, mentre l’angolo relativo tra braccio ed avambraccio varia di
circa 50° (10° in piu rispetto al soggetto precedente):
Figura 7.45: Andamenti cinematici tra schiena e braccio
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
2
4
6
8 angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−4
−2
0
2
4
6 velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−10
0
10 accelerazione angolare relativa
[s]
[deg
/s2 ]
Figura 7.46: Andamenti cinematici tra braccio e avambraccio
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
80
100
120angolo relativo
[s]
[deg
]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−40
−20
0
20
40 velocità angolare relativa
[s]
[deg
/s]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
−50
0
50
accelerazione angolare relativa
[s]
[deg
/s2 ]
La velocita del movimento e paragonabile a quella del caso precedente.
I risultati dell’analisi cinematica sono stati validati confrontando le posizioni dei ba-
ricentri fornite dal modello con quelle registrate dal sistema optoelettronico: a differenza
della doppia flesso-estensione, il modlelo predice correttamente tutte le coordinate dei
baricentri.
151
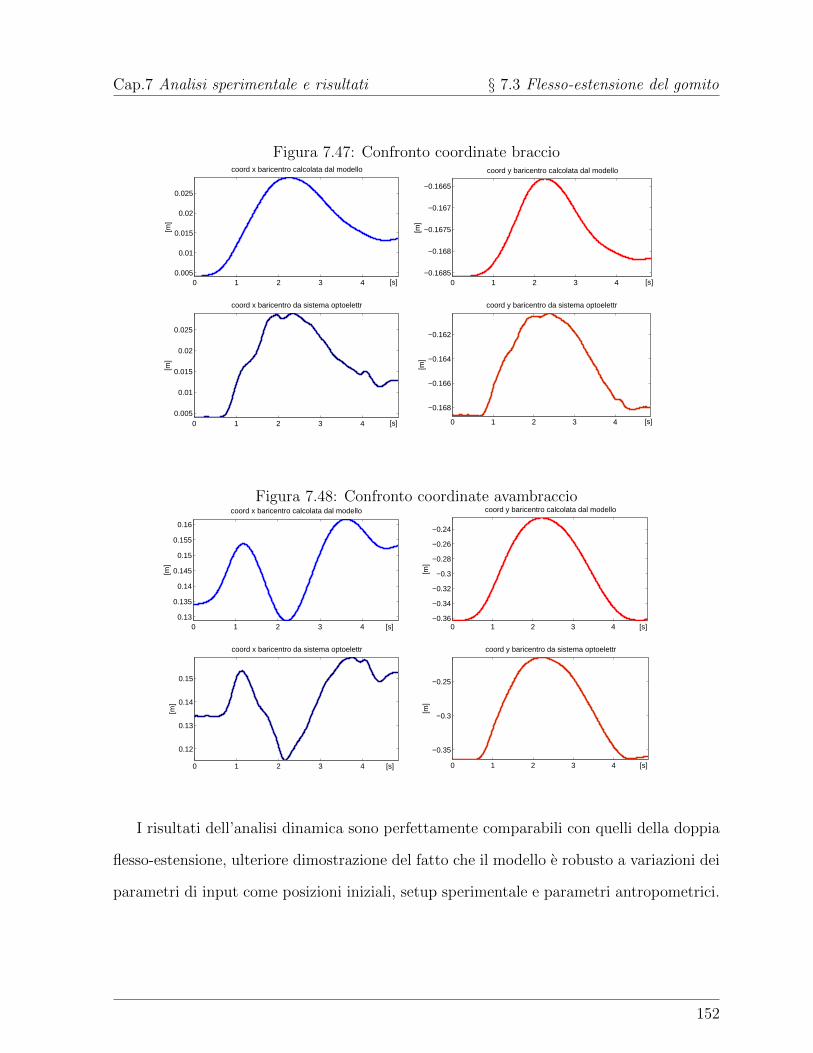
Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.47: Confronto coordinate braccio
0 1 2 3 40.005
0.01
0.015
0.02
0.025
coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4−0.1685
−0.168
−0.1675
−0.167
−0.1665
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 40.005
0.01
0.015
0.02
0.025
coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4
−0.168
−0.166
−0.164
−0.162
coord y baricentro da sistema optoelettr
[s][m
]
Figura 7.48: Confronto coordinate avambraccio
0 1 2 3 40.13
0.135
0.14
0.145
0.15
0.155
0.16
coord x baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4−0.36
−0.34
−0.32
−0.3
−0.28
−0.26
−0.24
coord y baricentro calcolata dal modello
[s]
[m]
0 1 2 3 4
0.12
0.13
0.14
0.15
coord x baricentro da sistema optoelettr
[s]
[m]
0 1 2 3 4
−0.35
−0.3
−0.25
coord y baricentro da sistema optoelettr
[s]
[m]
I risultati dell’analisi dinamica sono perfettamente comparabili con quelli della doppia
flesso-estensione, ulteriore dimostrazione del fatto che il modello e robusto a variazioni dei
parametri di input come posizioni iniziali, setup sperimentale e parametri antropometrici.
152

Cap.7 Analisi sperimentale e risultati § 7.3 Flesso-estensione del gomito
Figura 7.49: Dinamica per l’articolazione della spalla
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 1 2 3 4
2
4
6
8
angolo relativo
[s]
[deg
]
0 1 2 3 440.3
40.4
40.5
40.6
40.7
40.8Modulo della reaz vincolare
[s]
[N]
0 1 2 3 4
8
8.5
9
9.5
10
10.5
Coppia
[s][N
*m]
Figura 7.50: Dinamica per l’articolazione del gomito
−0.6 −0.4 −0.2 0 0.2 0.4 0.6
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x [m]
y [m
]
0 1 2 3 4
80
90
100
110
120
130
angolo relativo
[s]
[deg
]
0 1 2 3 4
59.5
59.6
59.7
59.8
59.9
60
60.1
Modulo della reaz vincolare
[s]
[N]
0 1 2 3 45
6
7
8
9
Coppia
[s]
[N*m
]
153
Capitolo 8Movimentazione manuale dei carichi
Il dolore lombo-sacrale, o Low-Back Pain, e una delle piu frequenti cause di riduzione
temporanea o permanente della capacita lavorativa. Nella societa attuale sono in diminu-
zione le malattie tipiche da lavoro un tempo particolarmente frequenti (silicosi, asbestosi,
malattie da metalli, asma bronchiale allergico, ipoacusie da rumore ecc.), mentre si assiste
all’evolversi della patologia professionale verso una sempre maggior visibilita delle malat-
tie legate a movimenti ripetitivi, alla movimentazione dei carichi e a posture incongrue
[18]. Queste situazioni sono riconducibili, nella maggior parte delle loro manifestazioni,
alla carente o nulla applicazione dei principi ergonomici alle attivita lavorative. Dal punto
di vista epidemiologico, tra le malattie suddette, la patologia professionale dovuta a mo-
vimenti ripetitivi rappresenta la maggior causa di lesioni muscolo-scheletriche e nervose
periferiche, superando in alcuni ambiti la patologia traumatica da infortunio; nella mag-
gior parte dei casi i movimenti ripetuti comportano un sovraccarico meccanico degli arti
superiori, e interessano soprattutto le strutture osteo-articolari e muscolo-tendinee [28].
L’altro gruppo di patologie, piu conosciuto ma ancor oggi poco affrontato dal punto di
vista valutativo e di ricerca delle possibili soluzioni, e costituito dalle affezioni discoarti-
colari della colonna lombare secondarie alla movimentazione manuale dei carichi (Manual
Material Handling, MMH). Esse rappresentano uno dei principali problemi sanitari nel
154
Cap.8 Movimentazione manuale dei carichi § 8.1 Metodo NIOSH
mondo del lavoro, stanti la rilevanza delle sofferenze e dei costi economici e sociali che
comportano (assenza per malattia, cure, modificazioni del lavoro, invalidita).
Il National Institute of Occupational Safety and Health (NIOSH USA) pone tali pato-
logie al secondo posto nella lista dei dieci problemi di salute piu importanti nel luogo di
lavoro. La movimentazione manuale dei carichi puo determinare lesioni acute e croniche
delle strutture del rachide del tutto indistinguibili dalla patologia degenerativa vertebra-
le riscontrabile nella popolazione generale, ove e legata ad una serie di fattori di ordine
generale (predisposizione genetica, obesita, malattie endocrino-metaboliche) e distrettua-
li (scoliosi, osteocondrosi, dismorfismi congeniti . . . ), e per tale ragione ancora oggi esse
vengono con difficolta inquadrate come malattie professionali.
Nonostante cio negli Stati Uniti il low-back pain determina una media di circa 28,5
giorni all’anno di assenza per malattia ogni 100 lavoratori e gli indennizzi per patologie
professionali della colonna assorbono circa 1/3 dei costi totali di indennizzo.
A livello internazionale la norma di riferimento per la valutazione della movimentazione
manuale dei carichi e la ISO 11228-1 del 2003, basata sulle linee guida stilate dal NIOSH nel
1993 [48] e comunemente note come Metodo Niosh. In Italia la movimentazione manuale
dei carichi e regolamentata dal decreto legislativo 106/09 (correttivo del D.Lgs 81/08), nel
quale si fa esplicito riferimento alla norma ISO 11228-1,2,3, sebbene tale norma non sia
cogente.
8.1 Metodo NIOSH
Consente la valutazione del rischio di insorgenza di patologie lombo-sacrali in seguito
allo svolgimento di attivita di sollevamento e abbassamento dei carichi. Consiste nella
determinazione di un Indice di Sollevamento (Lifting Index, LI) che da una valutazione
del movimento in termini di danno a lungo termine della colonna vertebrale, in particolar
modo del disco intervetebrale L5-S1.
155

Cap.8 Movimentazione manuale dei carichi § 8.1 Metodo NIOSH
Si parte dall’assunto che esista un massimo peso sollevabile in condizioni ideali, o
Costante di Peso (Load Constant, LC), e che sia possibile valutare tutti gli elementi sfa-
vorevoli (altezza del sollevamento, distanza, rotazione del tronco, ...) che impediscono
l’utilizzo di tale peso massimo, ovvero di quelle caratteristiche dell’azione di sollevamento
che contribuiscono a far variare il fattore di rischio legato ad uno specifico compito. Tali
fattori negativi vengono raggruppati in un’equazione, e determinano dei fattori demolti-
plicativi che contribuiscono a ridurre il peso massimo sollevabile ad un valore che e detto
Peso Limite Raccomandato (Reccomended Weight Limit, RWL), e che dovra essere valu-
tato per ciascuna azione di sollevamento esaminata. Ciascun fattore demoltiplicativo puo
assumere valori compresi tra 0 ed 1. Quando l’elemento di rischio potenziale corrisponde
ad una condizione ottimale, il relativo fattore assume valore unitario e pertanto non porta
ad alcun decremento del peso ideale iniziale. Quando l’elemento di rischio e presente,
discostandosi dalla condizione ottimale, il relativo fattore assume un valore inferiore a 1;
esso risulta tanto piu piccolo quanto maggiore e l’allontanamento dalla relativa condizione
ottimale: in tal caso il peso massimo movimentabile diminuisce di conseguenza. In taluni
casi l’elemento di rischio e considerato estremo: il relativo fattore viene posto uguale a 0,
significando che si e in una condizione di inadeguatezza assoluta per via di quello specifico
elemento di rischio. Il rapporto tra il Peso Effettivamente Sollevato (Load Weight, L) ed
il peso limite raccomandato determina il valore dell’indice di sollevamento.
Il peso limite raccomandato si calcola come:
RWL = LC X HM X VM X DM X AM X FM X CM (8.1)
mentre l’indice di sollevamento e dato da:
LI =L
RWL(8.2)
Di seguito vengono descritti i vari fattori demoltiplicativi presenti nell’equazione 8.1 e il
156
Cap.8 Movimentazione manuale dei carichi § 8.1 Metodo NIOSH
loro significato:
� Horizontal Multiplier HM: tiene conto della distanza orizzontale tra il baricentro
del corpo e quello del peso sollevato. Si calcola come 25/H, dove con H si indica la
distanza orizzontale massima del carico sollevato rispetto al corpo durante l’azione di
sollevamento, misurata dalla linea congiungente i malleoli interni al punto di mezzo
tra la presa delle mani (proiettato sul terreno).
� Vertical Multiplier VM: tiene conto dell’altezza delle mani dal suolo. Vale 1 −
0.03 |V − 75|, dove con V si intende la distanza verticale dal piano di appoggio dei
piedi al punto di mezzo tra la presa delle mani.
� Distance Multiplier DM: e un fattore che rende conto dello spostamento verticale
delle mani durante il sollevamento. Si calcola come 0.82− 1.8/D, dove D e definito
come il valore assoluto della differenza tra l’altezza delle mani all’origine e alla fine
del sollevamento.
� Asymmetric Multiplier AM: descrive l’ampiezza del movimento di torsione per sol-
levamenti che iniziano o terminano al di fuori del piano sagittale. Si ottiene da
1− 0.032A, dove l’angolo di asimmetria A e l’angolo fra la linea di asimmetria e la
linea sagittale. La linea di asimmetria congiunge idealmente il punto di mezzo tra le
caviglie e la proiezione a terra del punto intermedio alle mani.
� Coupling Multiplier CM: esprime un giudizio sulla presa del carico, che potra essere
buona, discreta o scarsa.
� Frequency Multiplier FM: indica il numero medio di sollevamenti effettuati in un
minuto durante tutta la durata del compito.
157
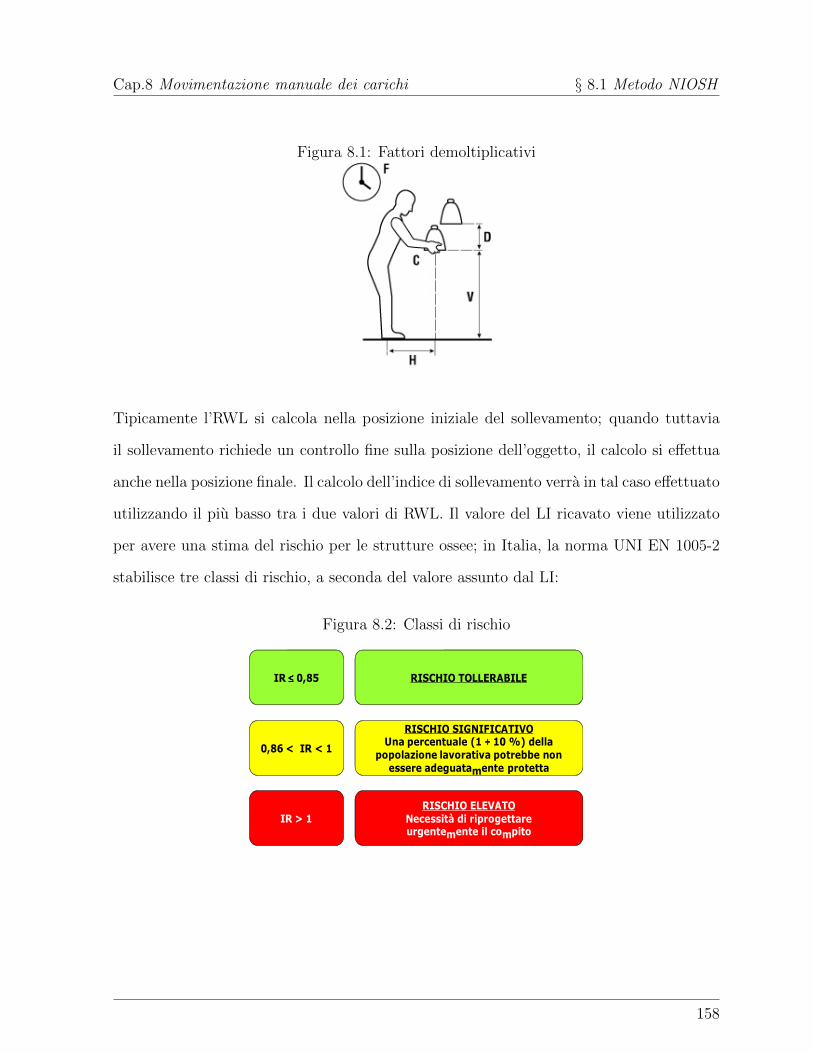
Cap.8 Movimentazione manuale dei carichi § 8.1 Metodo NIOSH
Figura 8.1: Fattori demoltiplicativi
Tipicamente l’RWL si calcola nella posizione iniziale del sollevamento; quando tuttavia
il sollevamento richiede un controllo fine sulla posizione dell’oggetto, il calcolo si effettua
anche nella posizione finale. Il calcolo dell’indice di sollevamento verra in tal caso effettuato
utilizzando il piu basso tra i due valori di RWL. Il valore del LI ricavato viene utilizzato
per avere una stima del rischio per le strutture ossee; in Italia, la norma UNI EN 1005-2
stabilisce tre classi di rischio, a seconda del valore assunto dal LI:
Figura 8.2: Classi di rischio
RISCHIO TOLLERABILE
RISCHIO SIGNIFICATIVOUna percentuale (1 ÷÷÷÷ 10 %) della
popolazione lavorativa potrebbe non essere adeguatamente protetta
RISCHIO ELEVATONecessità di riprogettareurgentemente il compito
IR ≤≤≤≤ 0,85
0,86 < IR < 1
IR > 1
158
Cap.8 Movimentazione manuale dei carichi § 8.2 Limiti di applicabilita
8.2 Limiti di applicabilita
Il metodo puo essere applicato solo qualora siano verificate determinate condizioni relative
a caratteristiche biomeccaniche, fisiologiche e psicofisiche:
1. Sollevamento-abbassamento come attivita prevalenti: le attivita diverse da quella
di movimentazione devono essere trascurabili e non devono richiedere significativo
dispendio energetico. Pertanto non sono contemplate attivita di sostegno statico di
un carico, attivita di traino e spinta e trasporto.
2. Condizioni particolari: attivita svolte con una sola mano, in posizione seduta o in
ginocchio o attivita svolte in spazi ristretti.
3. Stabilita: deve esserci condizione di assoluta stabilita del carico e dell’operatore.
4. Condizioni microclimatiche: devono essere soddisfatte le seguenti condizioni:
19°C ≤ T ≤ 26°C
35% ≤ UR ≤ 50%
Condizioni diverse possono avere rilevanti implicazioni fisiopatologiche nel determi-
nismo del danno.
5. Velocita: lo spostamento deve essere effettuato a bassa velocita. Alte velocita non
consentono un’adeguata predisposizione dell’assetto del sistema muscolo-scheletrico
e possono comportare fenomeni microtraumatici a fine corsa.
6. Peso sollevato maggiore di 3 kg; per pesi minori di 3 kg la normativa fa riferimento
al metodo OCRA sui movimenti ripetitivi degli arti superiori.
159
Cap.8 Movimentazione manuale dei carichi § 8.3 Modellazione del caso sperimentale
7. Soggetti di sesso diverso dal maschile e non lavoratori; questo limite viene superato
dalla norma ISO 11228-1, che fornisce dei valori di LC diversi a seconda del sesso e
del campo di applicazione (lavorativo o non).
Da questa breve panoramica risulta evidente come il metodo di calcolo del LI non consenta
di calibrare l’analisi sul lavoratore in esame. Inoltre e altrettanto evidente come la misura
dei fattori demoltiplicativi sia svolta con strumenti ben poco precisi, il che comporta che
uno stesso movimento, esaminato da due consulenti diversi, possa essere valutato in due
modi differenti.
Da tali considerazioni e nata l’idea di sfruttare il sistema di analisi del movimento e
il modello sviluppato per cercare di rendere piu oggettiva la valutazione del rischio da
movimentazione di carichi. Si e scelto di analizzare tre movimenti di sollevamento di
un peso, il primo dei quali, applicando il metodo Niosh, risultasse sicuro, il secondo dei
quali fosse al limite della zona ritenuta in sicurezza, mentre il terzo fosse fuori dal range
considerato sicuro.
8.3 Modellazione del caso sperimentale
Il primo problema che si e presentato e stato che il modello sviluppato e bidimensionale, e
pertanto il movimento da analizzare doveva avvenire interamente in un piano; si e scelto di
fare un sollevamento di un peso all’interno del piano sagittale. In effetti questa non e una
condizione particolarmente restrittiva, dal momento che molte azioni di movimentazione
dei carichi rimangono all’interno del piano sagittale. Si e scelto di sollevare un peso di
5 kg, perche la sperimentazione e stata condotta su un soggetto non lavoratore (non
essendo a disposizione un lavoratore); di conseguenza il massimo peso movimentabile era
10 kg. Inoltre, per limiti di capacita computazionale del pc sul quale e stato fatto girare
il modello, non si e potuto analizzare un movimento ripetuto, e quindi si e adottata la
frequenza minore prevista dal Niosh, ovvero minore di 0.2 sollevamenti/minuto. L’oggetto
160
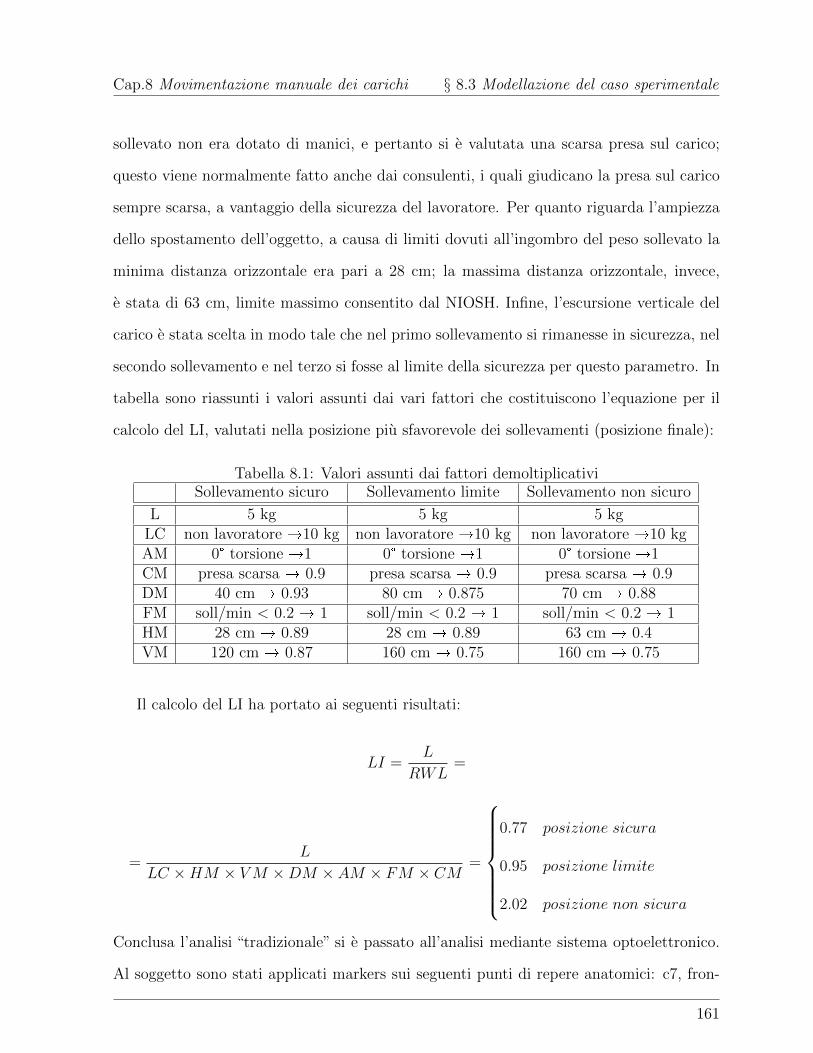
Cap.8 Movimentazione manuale dei carichi § 8.3 Modellazione del caso sperimentale
sollevato non era dotato di manici, e pertanto si e valutata una scarsa presa sul carico;
questo viene normalmente fatto anche dai consulenti, i quali giudicano la presa sul carico
sempre scarsa, a vantaggio della sicurezza del lavoratore. Per quanto riguarda l’ampiezza
dello spostamento dell’oggetto, a causa di limiti dovuti all’ingombro del peso sollevato la
minima distanza orizzontale era pari a 28 cm; la massima distanza orizzontale, invece,
e stata di 63 cm, limite massimo consentito dal NIOSH. Infine, l’escursione verticale del
carico e stata scelta in modo tale che nel primo sollevamento si rimanesse in sicurezza, nel
secondo sollevamento e nel terzo si fosse al limite della sicurezza per questo parametro. In
tabella sono riassunti i valori assunti dai vari fattori che costituiscono l’equazione per il
calcolo del LI, valutati nella posizione piu sfavorevole dei sollevamenti (posizione finale):
Tabella 8.1: Valori assunti dai fattori demoltiplicativiSollevamento sicuro Sollevamento limite Sollevamento non sicuro
L 5 kg 5 kg 5 kgLC non lavoratore �10 kg non lavoratore �10 kg non lavoratore �10 kgAM 0° torsione �1 0° torsione �1 0° torsione �1CM presa scarsa � 0.9 presa scarsa � 0.9 presa scarsa � 0.9DM 40 cm � 0.93 80 cm � 0.875 70 cm � 0.88FM soll/min < 0.2 � 1 soll/min < 0.2 � 1 soll/min < 0.2 � 1HM 28 cm � 0.89 28 cm � 0.89 63 cm � 0.4VM 120 cm � 0.87 160 cm � 0.75 160 cm � 0.75
Il calcolo del LI ha portato ai seguenti risultati:
LI =L
RWL=
=L
LC ×HM × VM ×DM × AM × FM × CM=
0.77 posizione sicura
0.95 posizione limite
2.02 posizione non sicura
Conclusa l’analisi “tradizionale” si e passato all’analisi mediante sistema optoelettronico.
Al soggetto sono stati applicati markers sui seguenti punti di repere anatomici: c7, fron-
161
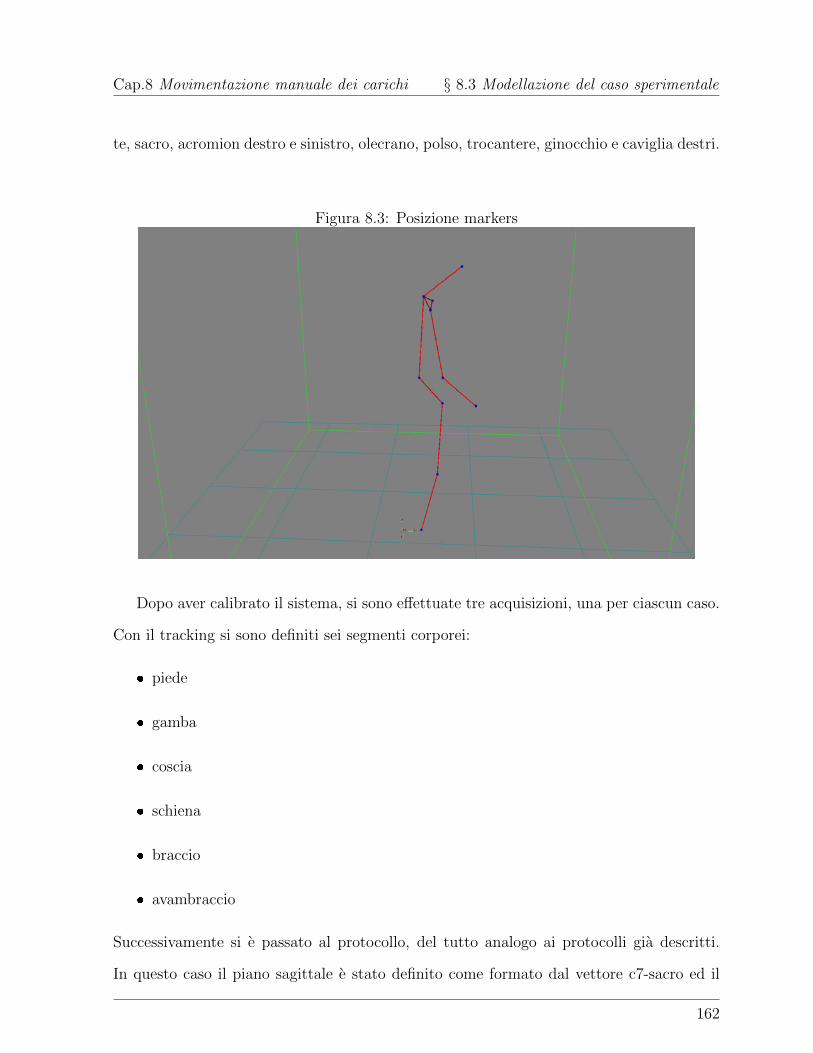
Cap.8 Movimentazione manuale dei carichi § 8.3 Modellazione del caso sperimentale
te, sacro, acromion destro e sinistro, olecrano, polso, trocantere, ginocchio e caviglia destri.
Figura 8.3: Posizione markers
Dopo aver calibrato il sistema, si sono effettuate tre acquisizioni, una per ciascun caso.
Con il tracking si sono definiti sei segmenti corporei:
� piede
� gamba
� coscia
� schiena
� braccio
� avambraccio
Successivamente si e passato al protocollo, del tutto analogo ai protocolli gia descritti.
In questo caso il piano sagittale e stato definito come formato dal vettore c7-sacro ed il
162

Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
vettore c7-punto medio tra gli acromion, mentre il s.d.r. relativo aveva come origine la
proiezione della caviglia nel piano sagittale e come assi cartesiani le proiezioni degli assi del
s.d.r. assoluto nel piano sagittale. Grazie al protocollo si sono ricavate le posizioni delle
proiezioni dei baricentri dei segmenti sul piano sagittale, espresse in coordinate relative,
nonche le lunghezze delle proiezioni dei segmenti sul piano sagittale e gli angoli relativi tra
i segmenti; i parametri antropometrici sono stati calcolati sempre secondo [23] sulla base
di un peso corporeo di 50 kg. Noti cosı tutti gli input necessari al modello, si e effettuata
l’analisi biomeccanica.
8.4 Analisi biomeccanica
Per questa serie di acquisizioni si e suddiviso il corpo umano in sei segmenti: piede (che
costituiva il telaio), gamba, coscia, schiena, braccio ed avambraccio. A questi segmenti
si sono applicati come driving constraints i cinque angoli relativi tra i corpi. Le forze
applicate, costanti, sono state la forza di gravita sui segmenti corporei e una forza applicata
all’estremita distale dell’avambraccio che tenesse conto del peso di 5 kg applicato sulle
mani. Nelle immagini seguenti viene presentato il confronto tra grandezze cinematiche e
dinamiche delle tre acquisizioni; la durata e stata normalizzata in modo tale da risultare
sempre minore di uno.
I grafici che mostrano gli andamenti degli angoli relativi, delle velocita e delle ac-
celerazioni angolari relative vengono qui omessi. L’unico grafico che viene mostrato e
quello dell’angolo relativo tra schiena e braccio, poiche e l’unico che presenta variazioni
significative.
163
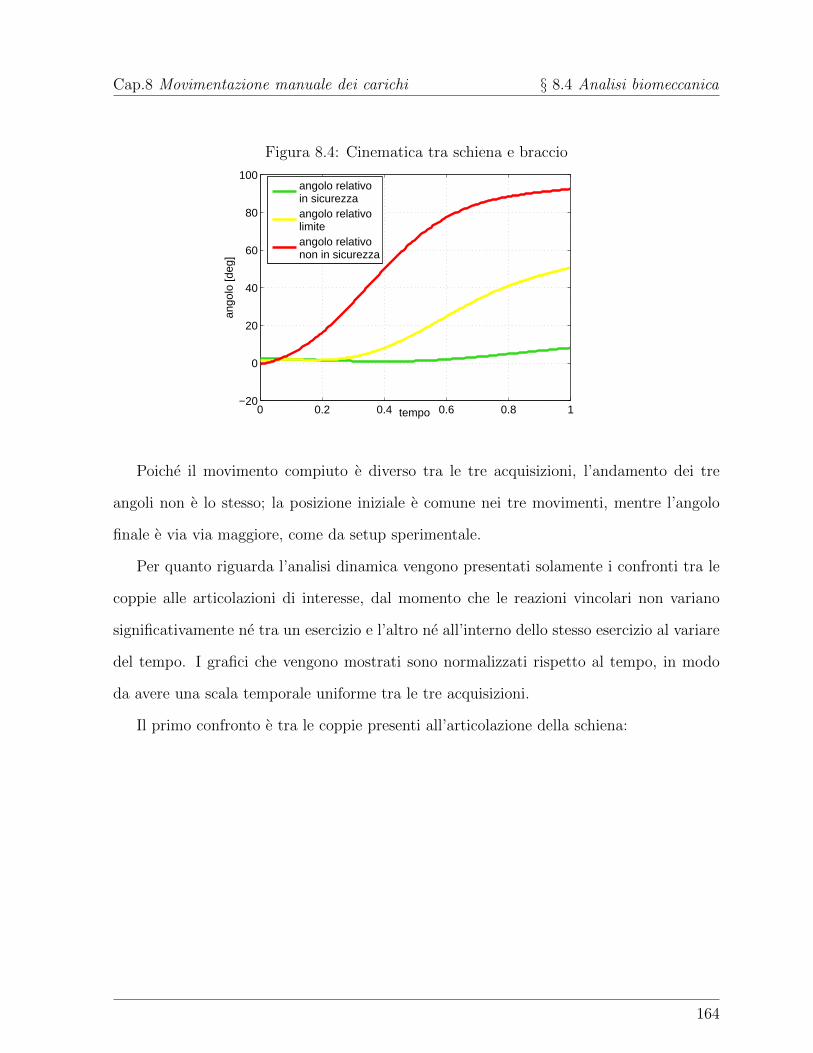
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
Figura 8.4: Cinematica tra schiena e braccio
0 0.2 0.4 0.6 0.8 1−20
0
20
40
60
80
100
tempo
ango
lo [d
eg]
angolo relativoin sicurezzaangolo relativolimiteangolo relativonon in sicurezza
Poiche il movimento compiuto e diverso tra le tre acquisizioni, l’andamento dei tre
angoli non e lo stesso; la posizione iniziale e comune nei tre movimenti, mentre l’angolo
finale e via via maggiore, come da setup sperimentale.
Per quanto riguarda l’analisi dinamica vengono presentati solamente i confronti tra le
coppie alle articolazioni di interesse, dal momento che le reazioni vincolari non variano
significativamente ne tra un esercizio e l’altro ne all’interno dello stesso esercizio al variare
del tempo. I grafici che vengono mostrati sono normalizzati rispetto al tempo, in modo
da avere una scala temporale uniforme tra le tre acquisizioni.
Il primo confronto e tra le coppie presenti all’articolazione della schiena:
164
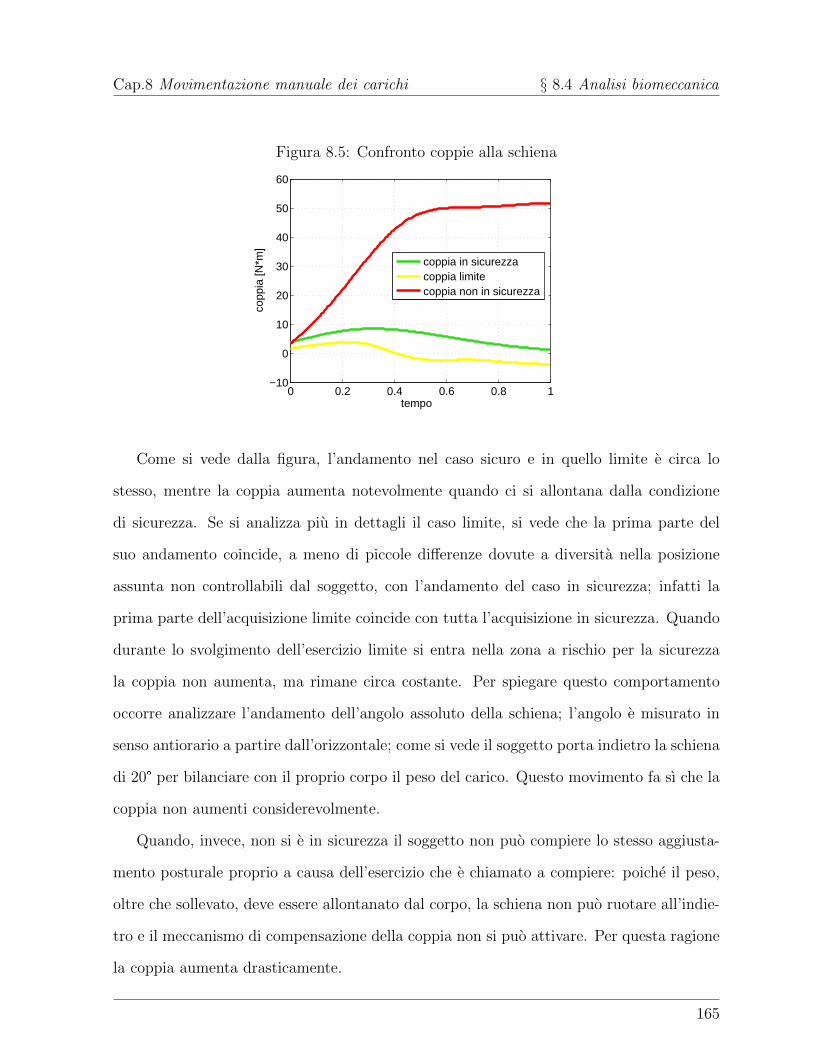
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
Figura 8.5: Confronto coppie alla schiena
0 0.2 0.4 0.6 0.8 1−10
0
10
20
30
40
50
60
tempo
copp
ia [N
*m]
coppia in sicurezzacoppia limitecoppia non in sicurezza
Come si vede dalla figura, l’andamento nel caso sicuro e in quello limite e circa lo
stesso, mentre la coppia aumenta notevolmente quando ci si allontana dalla condizione
di sicurezza. Se si analizza piu in dettagli il caso limite, si vede che la prima parte del
suo andamento coincide, a meno di piccole differenze dovute a diversita nella posizione
assunta non controllabili dal soggetto, con l’andamento del caso in sicurezza; infatti la
prima parte dell’acquisizione limite coincide con tutta l’acquisizione in sicurezza. Quando
durante lo svolgimento dell’esercizio limite si entra nella zona a rischio per la sicurezza
la coppia non aumenta, ma rimane circa costante. Per spiegare questo comportamento
occorre analizzare l’andamento dell’angolo assoluto della schiena; l’angolo e misurato in
senso antiorario a partire dall’orizzontale; come si vede il soggetto porta indietro la schiena
di 20° per bilanciare con il proprio corpo il peso del carico. Questo movimento fa sı che la
coppia non aumenti considerevolmente.
Quando, invece, non si e in sicurezza il soggetto non puo compiere lo stesso aggiusta-
mento posturale proprio a causa dell’esercizio che e chiamato a compiere: poiche il peso,
oltre che sollevato, deve essere allontanato dal corpo, la schiena non puo ruotare all’indie-
tro e il meccanismo di compensazione della coppia non si puo attivare. Per questa ragione
la coppia aumenta drasticamente.
165
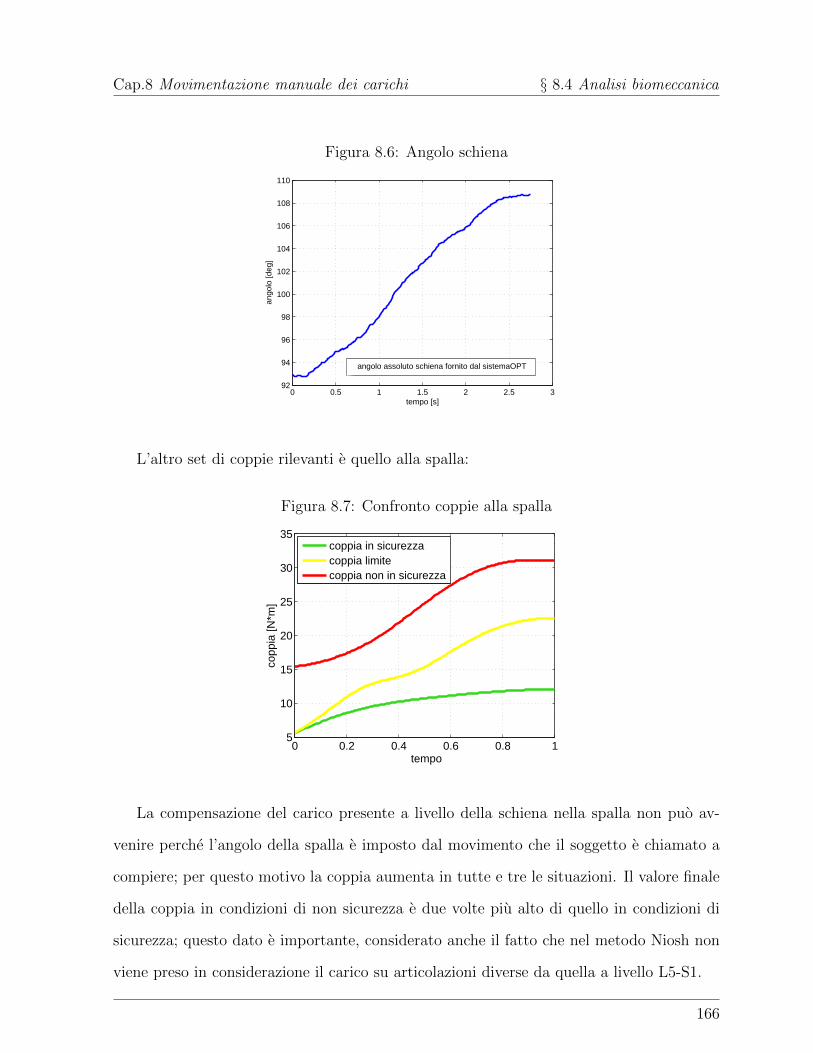
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
Figura 8.6: Angolo schiena
0 0.5 1 1.5 2 2.5 392
94
96
98
100
102
104
106
108
110
tempo [s]
ango
lo [d
eg]
angolo assoluto schiena fornito dal sistemaOPT
L’altro set di coppie rilevanti e quello alla spalla:
Figura 8.7: Confronto coppie alla spalla
0 0.2 0.4 0.6 0.8 15
10
15
20
25
30
35
tempo
copp
ia [N
*m]
coppia in sicurezzacoppia limitecoppia non in sicurezza
La compensazione del carico presente a livello della schiena nella spalla non puo av-
venire perche l’angolo della spalla e imposto dal movimento che il soggetto e chiamato a
compiere; per questo motivo la coppia aumenta in tutte e tre le situazioni. Il valore finale
della coppia in condizioni di non sicurezza e due volte piu alto di quello in condizioni di
sicurezza; questo dato e importante, considerato anche il fatto che nel metodo Niosh non
viene preso in considerazione il carico su articolazioni diverse da quella a livello L5-S1.
166
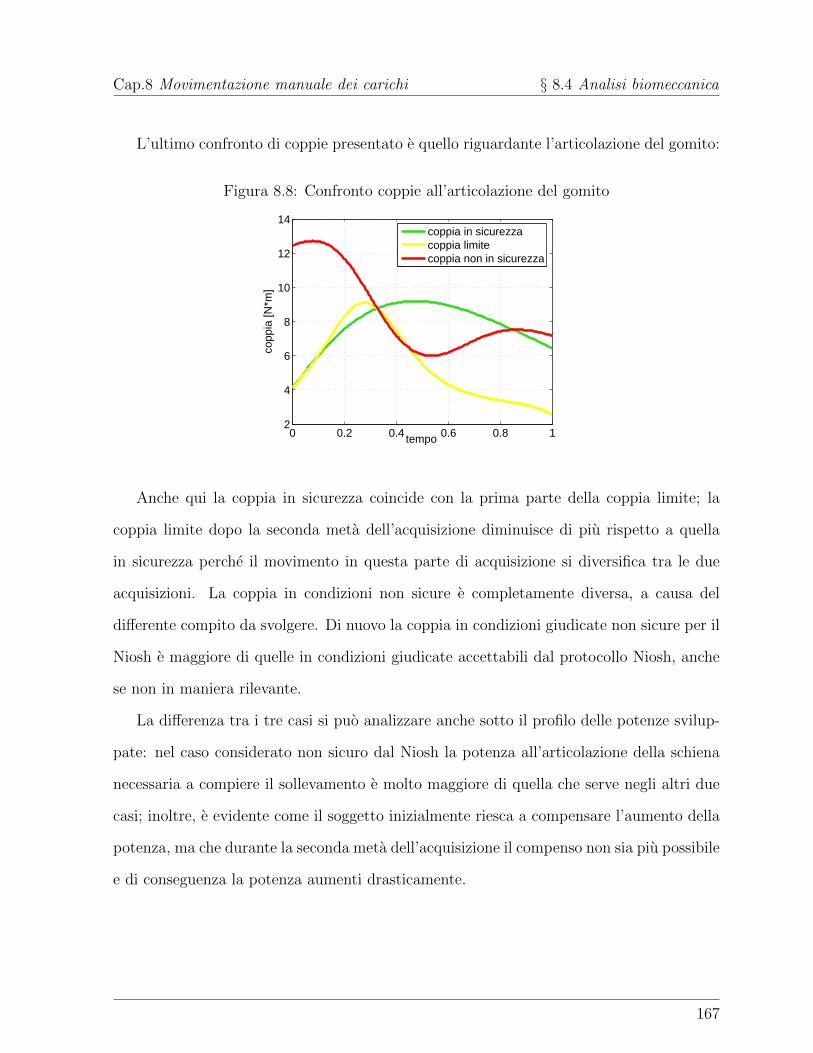
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
L’ultimo confronto di coppie presentato e quello riguardante l’articolazione del gomito:
Figura 8.8: Confronto coppie all’articolazione del gomito
0 0.2 0.4 0.6 0.8 12
4
6
8
10
12
14
tempo
copp
ia [N
*m]
coppia in sicurezzacoppia limitecoppia non in sicurezza
Anche qui la coppia in sicurezza coincide con la prima parte della coppia limite; la
coppia limite dopo la seconda meta dell’acquisizione diminuisce di piu rispetto a quella
in sicurezza perche il movimento in questa parte di acquisizione si diversifica tra le due
acquisizioni. La coppia in condizioni non sicure e completamente diversa, a causa del
differente compito da svolgere. Di nuovo la coppia in condizioni giudicate non sicure per il
Niosh e maggiore di quelle in condizioni giudicate accettabili dal protocollo Niosh, anche
se non in maniera rilevante.
La differenza tra i tre casi si puo analizzare anche sotto il profilo delle potenze svilup-
pate: nel caso considerato non sicuro dal Niosh la potenza all’articolazione della schiena
necessaria a compiere il sollevamento e molto maggiore di quella che serve negli altri due
casi; inoltre, e evidente come il soggetto inizialmente riesca a compensare l’aumento della
potenza, ma che durante la seconda meta dell’acquisizione il compenso non sia piu possibile
e di conseguenza la potenza aumenti drasticamente.
167
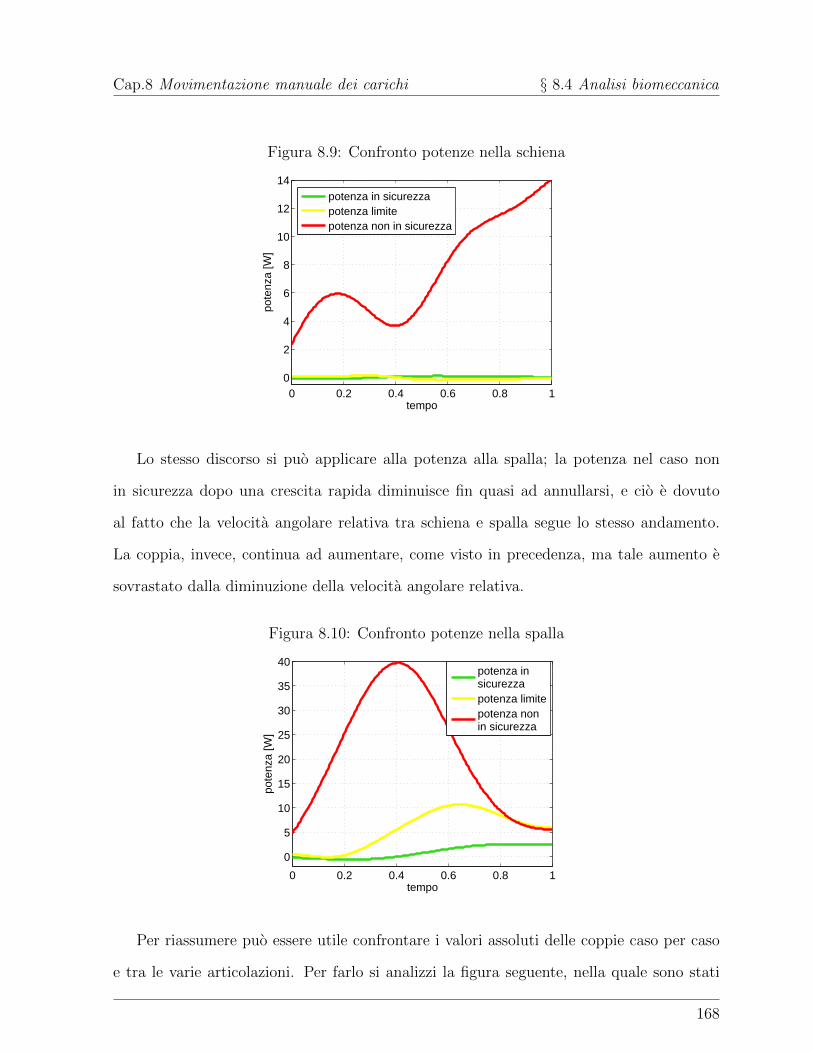
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
Figura 8.9: Confronto potenze nella schiena
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10
12
14
tempo
pote
nza
[W]
potenza in sicurezzapotenza limitepotenza non in sicurezza
Lo stesso discorso si puo applicare alla potenza alla spalla; la potenza nel caso non
in sicurezza dopo una crescita rapida diminuisce fin quasi ad annullarsi, e cio e dovuto
al fatto che la velocita angolare relativa tra schiena e spalla segue lo stesso andamento.
La coppia, invece, continua ad aumentare, come visto in precedenza, ma tale aumento e
sovrastato dalla diminuzione della velocita angolare relativa.
Figura 8.10: Confronto potenze nella spalla
0 0.2 0.4 0.6 0.8 1
0
5
10
15
20
25
30
35
40
tempo
pote
nza
[W]
potenza insicurezzapotenza limitepotenza nonin sicurezza
Per riassumere puo essere utile confrontare i valori assoluti delle coppie caso per caso
e tra le varie articolazioni. Per farlo si analizzi la figura seguente, nella quale sono stati
168
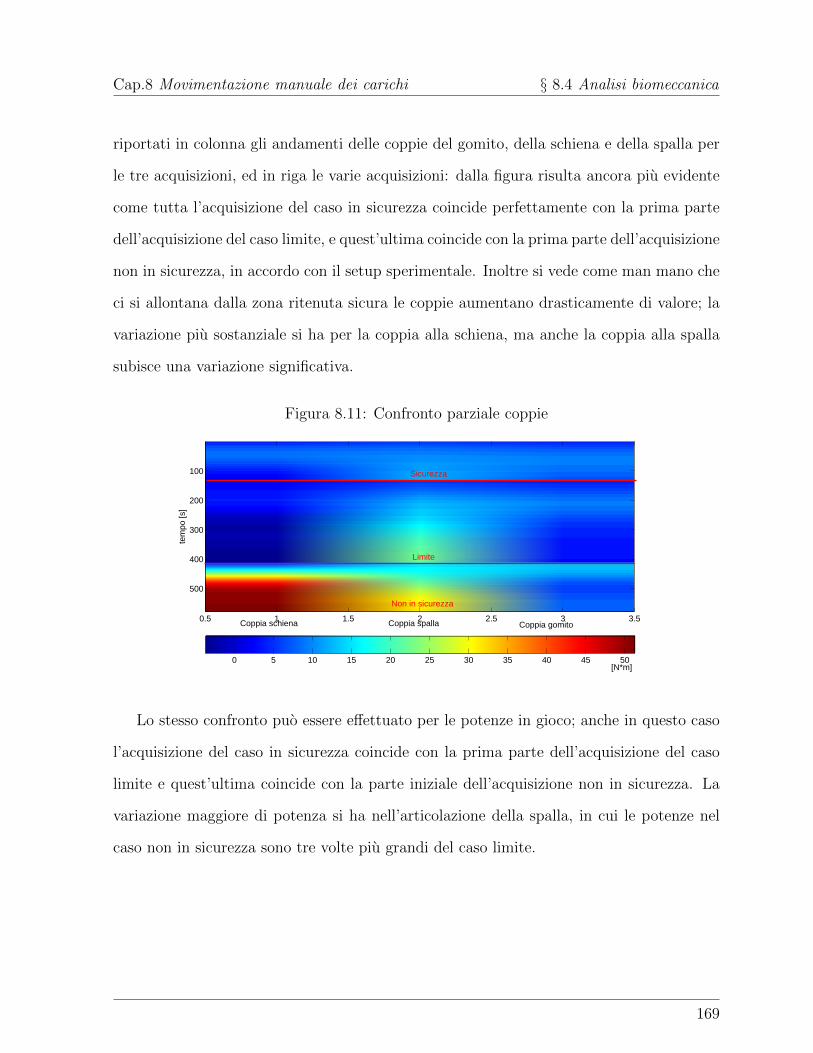
Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
riportati in colonna gli andamenti delle coppie del gomito, della schiena e della spalla per
le tre acquisizioni, ed in riga le varie acquisizioni: dalla figura risulta ancora piu evidente
come tutta l’acquisizione del caso in sicurezza coincide perfettamente con la prima parte
dell’acquisizione del caso limite, e quest’ultima coincide con la prima parte dell’acquisizione
non in sicurezza, in accordo con il setup sperimentale. Inoltre si vede come man mano che
ci si allontana dalla zona ritenuta sicura le coppie aumentano drasticamente di valore; la
variazione piu sostanziale si ha per la coppia alla schiena, ma anche la coppia alla spalla
subisce una variazione significativa.
Figura 8.11: Confronto parziale coppie
tem
po [s
]
0.5 1 1.5 2 2.5 3 3.5
100
200
300
400
500
0 5 10 15 20 25 30 35 40 45 50
Coppia schiena Coppia spalla Coppia gomito
Sicurezza
Limite
Non in sicurezza
[N*m]
Lo stesso confronto puo essere effettuato per le potenze in gioco; anche in questo caso
l’acquisizione del caso in sicurezza coincide con la prima parte dell’acquisizione del caso
limite e quest’ultima coincide con la parte iniziale dell’acquisizione non in sicurezza. La
variazione maggiore di potenza si ha nell’articolazione della spalla, in cui le potenze nel
caso non in sicurezza sono tre volte piu grandi del caso limite.
169

Cap.8 Movimentazione manuale dei carichi § 8.4 Analisi biomeccanica
Figura 8.12: Confronto parziale potenze
tem
po [s
]
0.5 1 1.5 2 2.5 3 3.5
50
100
150
200
250
300
350
400
450
500
550
−5 0 5 10 15 20 25 30 35
Potenza schiena Potenza spalla Potenza gomito
Sicurezza
Limite
Non in sicurezza
[W]
170

Conclusioni
Scopo di questo lavoro di tesi e stato di sviluppare un modello 2D che permettesse di
effettuare un’analisi biomeccanica del movimento umano, in particolar modo nei riguardi
dell’analisi del gesto lavorativo, con il fine di rendere piu oggettiva la valutazione dello
stesso.
Le equazioni differenziali che governano il moto dei segmenti articolari sono state de-
dotte avvalendosi della metodologia multibody e risolte utilizzando la formulazione che
discende dall’applicazione del principio di minima azione di Gauss. Alcuni dei dati ri-
chiesti in input dal modello provengono da un sistema di analisi del movimento basato su
tecnologia optoelettronica.
La validazione del modello e stata effettuata analizzando sei movimenti elementari;
confrontando la cinematica stimata dal modello con quella misurata dal sistema optoe-
lettronico si e ottenuta una piena concordanza. Per quanto riguarda la dinamica, invece,
non si e potuto effettuare la validazione mediante confronto con il sistema optoelettronico,
dal momento che quest’ultimo non fornisce dati dinamici; i risultati dinamici sono stati
comunque confrontati con quelli ricavati dal modello sviluppato in un altro lavoro di tesi1.
Conclusa la validazione del modello si e passato ad applicare il modello all’analisi del
sollevamento di un oggetto, movimento tipico in ambito lavorativo. Si sono cosı stimate
1Per approfondimenti si consulti [36]
171

la dinamica e la cinematica dei corpi presi in esame, e queste sono state confrontate con
le indicazioni della normativa vigente in campo di movimentazione manuale dei carichi.
Dal confronto e emerso che la normativa e sostanzialmente adeguata: nei movimenti che
vengono valutati come sicuri il soggetto, mediante piccoli aggiustamenti posturali, peral-
tro involontari, riesce a mantenere limitate le coppie alle articolazioni; quando invece il
movimento che il soggetto e chiamato a compiere e tale da non consentire piu degli aggiu-
stamenti posturali, le coppie alle articolazioni aumentano drasticamente e per la normativa
non si e piu in sicurezza. Attraverso il modello, quindi, la valutazione biomeccanica della
movimentazione manuale dei carichi puo essere svolta in maniera oggettiva e ripetibile;
inoltre, considerato che la normativa prende in considerazione solamente gli sforzi agen-
ti sull’articolazione tra le vertebre L5-S1, con il modello si ottiene una prospettiva piu
ampia, che permette di indagare cio che avviene a livello di tutte le articolazioni di inte-
resse. Con il modello, poi, si riesce a particolarizzare lo studio al soggetto effettivamente
preso in esame. Infine, non bisogna dimenticare che il Metodo Niosh ha numerosi limiti
di applicabilita. Ad esempio non puo essere utilizzato se il soggetto si trova in posizione
seduta; il modello, invece, permette di calcolare gli sforzi alle articolazioni anche in caso
di restrizioni imposte al movimento del soggetto.
Un’ importante estensione del lavoro svolto riguarda il passaggio dal caso bidimensio-
nale a quello 3D, passaggio che permetterebbe di tenere in conto della torsione del busto
durante la movimentazione manuale dei carichi.
Un altro limite del presente lavoro e la compatibilita tra il formato in cui vengono
forniti i dati del sistema optoelettronico e quello in cui tali dati devono essere portati
per l’analisi in Matlab; il problema piu grande comunque, dovuto ad una limitazione del
sistema optoelettronico impiegato, resta il fatto che gli angoli non vengono forniti dal
sistema con una convenzione univoca (ad esempio misurati in senso antiorario a partire
dall’orizzontale), e quindi devono essere controllati e modificati dall’utente di volta in
volta.
172
Infine, si potrebbe pensare di estendere lo studio sulla movimentazione manuale dei
carichi anche alle operazioni di trasporto, traino e spinta (ISO 11228-2) e movimentazione
di carichi leggeri ad alta frequenza (ISO 11228-3).
173

Appendice AInversa generalizzata di una matrice
Per risolvere il sistema algebrico di equazioni
A · x = b (A.1)
rispetto all’incognita x occorre invertire la matrice dei coefficienti A:
x = A−1b (A.2)
Se la matrice A e quadrata e non singolare l’inversione non presenta problemi, almeno
concettualmente. Se pero la matrice e non singolare ma anche non quadrata, ad esempio
ha dimensioni mxn, per risolvere il sistema sara necessario estendere il concetto di inversa
e sviluppare un’inversa “generalizzata”. Esistono vari tipi di inversa generalizzata; nel
seguito se ne definiranno tre: la G-inversa, la L-inversa e la MP-inversa.
La G-inversa si usa per risolvere un sistema algebrico di equazioni lineare consistente
in cui A e non quadrata; la L-inversa si adotta per risolvere un problema di minimo
quadrato, ovvero la ricerca del vettore x che minimizzi la quantita ‖A · x− b‖2 sempre nel
caso generale in cui A sia non quadrata.
174

App.A Inversa generalizzata di una matrice §A.1 MP-inversa
A.1 MP-inversa
Si definisce inversa generalizzata di Moore-Penrose della matrice A, di dimensioni mxn e
rank(A) = r, r ≤ m, una matrice A+, di dimensioni nxm che soddisfi le condizioni MP:
AA+A = A (A.3)
A+AA+ = A+ (A.4)
AA+ =(AA+
)Tovvero AA+ ∈ Sym (A.5)
A+A =(A+A
)Tovvero A+A ∈ Sym (A.6)
A.2 G-inversa
Si consideri la matrice A di dimensioni mxn e rank(A) = r, r ≤ m. Si definira G-inversa
di A una matrice nxm che soddisfi la prima condizione MP, ovvero:
AAGA = A (A.7)
A.3 L-inversa
Si consideri la matrice A di dimensioni mxn e rank(A) = r, r ≤ m. Si definira L-inversa
di A una matrice nxm che soddisfi la prima e la terza condizione MP, ovvero:
AALA = A (A.8)
AAL =(AAL
)T(A.9)
175

App.A Inversa generalizzata di una matrice §A.4 Esistenza ed unicita della MP-inversa
Poiche la L-inversa deve soddisfare una condizione in piu rispetto alla G-inversa, segue
necessariamente che ogni L-inversa e anche una G-inversa. Inoltre, si osservi che possono
esserci piu di una G-inversa e piu di una L-inversa per una data matrice, mentre la MP-
inversa e unica. Infine, poiche la MP-inversa soddisfa condizioni piu restrittive delle altre
due inverse, ogni MP-inversa e anche una G-inversa e una L-inversa.
A.4 Esistenza ed unicita della MP-inversa
Si comincia dimostrando l’esistenza, ovvero che per ogni matrice A non quadrata di di-
mensioni mxn e rango r esiste una matrice nxm che soddisfa le quattro condizioni MP.
Decomponendo la matrice A in valori singolari:
A = WΛV T = λ1w1vT1 + ...+ λrwrv
Tr (A.10)
si puo scrivere la matrice pseudoinversa come:
A+ = V Λ−1W T =1
λ1
v1wT1 + ...+
1
λrvrw
Tr (A.11)
Per verificare che quella appena scritta sia effettivamente la pseudoinversa di A si deve
controllare che essa soddisfi le quattro condizioni MP. Si comincia verificando che A+
soddisfa la prima delle quattro condizioni:
AA+ = WΛV TV Λ−1W T = WΛIrΛ−1W T = WIrW
T = WW T (A.12)
⇒ AA+A = WW TA = WW TWΛV T = WIrΛVT = WΛV T = A (A.13)
Che AA+sia simmetrica, ovvero che sia valida la terza condizione, segue poi dal lato
destro dell’equazione (A.12). Analogamente si puo dimostrare che A+soddisfa le altre due
176

App.A Inversa generalizzata di una matrice §A.4 Esistenza ed unicita della MP-inversa
condizioni:
A+A = V Λ−1W TWΛV T = V Λ−1IrΛVT = V IrV
T = V V T (A.14)
⇒ A+AA+ = V V TA+ = V V TV Λ−1W T = V IrΛ−1W T = V Λ−1W T = A+ (A.15)
Infine, l’ultima condizione e verificata dall’ultima uguaglianza dell’equazione (A.14).
Si passa ora a dimostrare l’unicita della MP-inversa, procedendo per assurdo; biso-
gna quindi dimostrare che, data una matrice A, se A+1 ed A+
2 sono due sue MP-inverse,
necessariamente A+1 = A+
2 e quindi
AA+
1 = AA+2
A+1 A = A+
2 A
(A.16)
infatti, se valgono queste due uguaglianze, allora
A+2 = A+
2 AA+2 = A+
2
(AA+
2
)= A+
2
(AA+
1
)=(A+
2 A)A+
1 =(A+
1 A)A+
1 = A+1 AA
+1 = A+
1
(A.17)
ed il teorema e dimostrato. Rimane ora solo da dimostrare che, se se A+1 ed A+
2 sono due
MP-inverse di A, allora valgono le due relazioni (2.61); per farlo si comincia applicando la
prima MP-condizione ad A+1 e postmoltiplicando entrambi i membri per A+
2 :
AA+2 = AA+
1 AA+2 (A.18)
Ora per la terza MP-condizione applicata ad A+2 il primo membro deve essere simmetrico
e, affinche sia valida l’uguaglianza, lo deve essere anche il secondo membro:
AA+1 AA
+2 =
(AA+
1 AA+2
)T(A.19)
⇒ AA+2 = AA+
1 AA+2 =
((AA+
1
) (AA+
2
))T=(AA+
1
)T (AA+
2
)T=
177
App.A Inversa generalizzata di una matrice §A.5 Calcolo numerico della MP-inversa
=(AA+
1
) (AA+
2
)=(AA+
2 A)A+
1 = AA+1 (A.20)
e quindi la prima delle condizioni (A.16) e verificata. Ora si applichi la prima delle MP-
condizioni ad A+1 e sene premoltiplichino ambo i membri per A+
2 :
A+2 A = A+
2 AA+1 A (A.21)
Ora per la quarta MP-condizione applicata ad A+2 il primo membro deve essere simmetrico
e, affinche sia valida l’uguaglianza, lo deve essere anche il secondo membro:
A+2 A = A+
2 AA+1 A =
(A+
2 AA+1 A)T
=((A+
2 A) (A+
1 A))T
=
=(A+
1 A)T (
A+2 A)T
=(A+
1 A) (A+
2 A)
= A+1
(AA+
2 A)
= A+1 A (A.22)
e la seconda delle (A.16) e dimostrata.
A.5 Calcolo numerico della MP-inversa
Come si e mostrato, la matrice Moore-Penrose e associata alla soluzione, con il criterio dei
minimi quadrati, del sistema lineare:
A · x = b (A.23)
quando il numero m di equazioni e diverso da quello n delle incognite. Si osserva che la
matrice A non ha necessariamente rango pieno. Possono quindi distinguersi i seguenti casi:
1. sistema sovradeterminato (m > n): affinche
h = ‖A · x− b‖22 (A.24)
178

App.A Inversa generalizzata di una matrice §A.5 Calcolo numerico della MP-inversa
abbia un minimo, necessariamente deve risultare
ATA · x = AT · b (A.25)
e la soluzione del sistema lineare di partenza sara
x = A+ · b (A.26)
dove con A+ si e indicata la matrice pseudoinversa destra, ovvero:
A+ =(ATA
)−1AT (A.27)
2. sistema sottodeterminato (m<n): la soluzione si ottiene imponendo che il vettore
x abbia norma euclidea minima, ovvero
g = ‖x‖22 (A.28)
Quindi, introducendo una nuova funzione obiettivo
g′ = g + λT (A · x− b) (A.29)
la soluzione si otterra risolvendo il sistema I AT
A 0
x
λ
=
0
b
(A.30)
ovvero
x = A+ · b (A.31)
179

App.A Inversa generalizzata di una matrice §A.5 Calcolo numerico della MP-inversa
purche si indichi con
A+ = AT(AAT
)−1(A.32)
la matrice pseudoinversa sinistra.
A.5.1 Calcolo matrice pseudoinversa mediante fattorizzazione di
Gram-Schmidt
Un semplice metodo per il calcolo della matrice inversa generalizzata di A con vettori
colonna indipendenti consiste nell’eseguire su tale matrice la decomposizione di Gram-
Schmidt, ovvero nel suddividere la matrice di partenza nel prodotto di due matrici
[A]mxn = [Q]mxn [R]nxn (A.33)
dove Q e una matrice unitaria e R e una matice triangolare quadrata con rango pieno.
Quindi, tenuta presente la proprieta sulla generalizzata inversa di prodotti di matrici, si
procede al calcolo della pseudoinversa di A:
A+ = (QR)+ = R+Q+ = R−1QT (A.34)
A.5.2 Calcolo matrice pseudoinversa mediante decomposizione
SVD
Mediante decomposizione SVD si decompone la matrice A di rango r nel prodotto
[A]mxn = [V ]mxm [Λ]mxn [U ]Tmxm (A.35)
dove
UTU = I, V TV = I (A.36)
180

App.A Inversa generalizzata di una matrice §A.5 Calcolo numerico della MP-inversa
V V T = I (A.37)
La SVD puo anche essere espressa in forma ridotta: posto
[V ] =
[V1(mxr) V2(mx(m−r))
](A.38)
Λ =
Λ1(rxr) 0
0 0
(A.39)
[U ]T =
UT1(rxn)
UT2((n−r)xn)
(A.40)
si dimostra essere
[A]mxn = [V1]mxr [Λ]rxr [U1]Trxn (A.41)
Ricordando le proprieta (A.36) e (A.37)di cui godono le matrici U e V, la pseudoinversa
di A discende dal prodotto
[A]+ = [U1] [Λ1]−1 [V1]T (A.42)
A.5.3 Calcolo matrice pseudoinversa mediante algoritmo di Gre-
ville
I passi dell’algoritmo sono tre:
1. si decompone la matrice [A]mxn nei suoi vettori riga {ai} , i = 1, 2, ...,m
2. si pone
[Ai]ixn =
Ai−1
ai
(A.43)
con [A1]1xn = {a1}1xn;
181

App.A Inversa generalizzata di una matrice §A.5 Calcolo numerico della MP-inversa
3. Per i = 2, ...,m si valuta la matrice [Ai]+ come
[Ai]+nxi =
[[Ai−1]+ − {bi}T {di} | {bi}T
](A.44)
in cui si e indicato con
{di}1x(i−1) = {ai} [Ai−1]+ (A.45)
{ci}1xn = {ai} − {di} [Ai−1] (A.46)
{bi}1xn =
{ci}
{ci}{ci}T(‖ci‖ 6= 0)
{di}[A+i−1]
T
1+{di}{di}T(‖ci‖ = 0)
(A.47)
[A1]+ =
{a1}T
{a1}{a1}T(‖a1‖ 6= 0)
{a1}T (‖a1‖ = 0)
(A.48)
Dopo m cicli [Am]+ fornisce la pseudoinversa [A]+mxn di A.
182

Bibliografia
[1] http://www.motion-capture-system.com/resources/history.html.
[2] http://www.seniam.org/.
[3] SMART-D Motion Capture System manuale utente versione 1.12.
[4] F. C. Andersson and M. G. Pandy. Dynamic optimization of human walking. Journal
of Biomechanical Engineering, 123:381–391, 2001.
[5] P. Appell. Exemple de mouvement d’un point assujeti a une liason exprimee par une
relation non lineaire entre les composantes de la vitesse. Comptes Rendus, 1911.
[6] M.M. Ayoub. Modeling in manual materials handling. The Ergonomics of Manual
Work, pages 11–18, 1993.
[7] J. W. Baumgarte. Stabilization of constraints and integrals of motion in dynamical
systems. Computer Methods in Applied Mechanics and Engineering, 1:1–16, 1972.
[8] J. W. Baumgarte. A new method of stabilization for holonomic constraints. Journal
of Applied Mechanics, 50:869–870, 1983.
183
BIBLIOGRAFIA
[9] T. M. Bernard, M. M. Ayoub, and C. J. Lin. Effects of speed of lift on static and
inertial moments at the joints. International Journal of Industrial Ergonomics, 24:39–
47, 1999.
[10] W. Blajer. Elimination of constraint violation and accuracy aspects in numerical
simulation of multibody systems. Multibody System Dynamics, 7:265–284, 2002.
[11] A. N. Borghese and P. Cerveri. Calibrating a video camera pair with a rigid bar.
Pattern Recognition, 33:81–95, 2000.
[12] D. Capecchi. Storia del Principio dei Lavori Virtuali. La meccanica alternativa.
Hevelius edizioni, 2002.
[13] D. B. Chaffin, G. B. J. Andersson, and B. J. Martin. Occupational Biomechanics, 4th
edition. Wiley, 2006.
[14] R.F. Chandler, C. E. Clauser, J. T. McConville, H. M. Reynolds, and J. W. Young.
Investigation of inertial properties of the human body. Technical report, Aerospace
Medical Research Laboratory, 1975.
[15] C. O. Chang and P. Nikravesh. An adaptive constraint violation stabilization me-
thod for dynamic analysis of mechanical systems. ASME Journal of Mechanisms,
Transmission and Automation in Design, 107:488–492, 1985.
[16] F. Cheli and E. Pennestrı. Cinematica e Dinamica dei Sistemi Multibody, vol I. Casa
Editrice Ambrosiana, 2006.
[17] C. E. Clauser, J. T. McConville, and J. W. Young. Weight, volume and center of
mass of segments of the human body. Technical report, Aerospace Medical Research
Laboratory, 1969.
184

BIBLIOGRAFIA
[18] D. Colombini, E. Occhipinti, and S. Cairoli. Le affezioni muscolo scheletriche de-
gli arti superiori e inferiori come patologie professionali: quali e a quali condizioni.
Documento di consenso di un gruppo di lavoro nazionale. Med.Lav., 94:312–329, 2003.
[19] M. Damavandi, N. Farahpourd, and P. Allard. Determination of body segment masses
and centers of mass using a force plate method in individuals of different morphology.
Medical Engineering & Physics, 31:1187–1194, 2009.
[20] M. Damsgaard, J. Rasmussen, S. T. Christensen, E. Surma, and M. de Zee. Analysis
of musculoskeletal systems in the Anybody Modeling System. Simulation Modelling
Practice and Theory, 14:1100–1111, 2006.
[21] D. T. Davy and M. L. Audu. A dynamic optimization technique for predicting muscle
forces in the swing phase of gait. Journal of Biomechanics, 20:187–201, 1987.
[22] D. de Falco. Dinamica Analitica. EdiSES, 2009.
[23] P. de Leva. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters.
Journal of Biomechanics, 29:1223–1230, 1996.
[24] W. T. Dempster. Space requirements of the seated operator. Technical report,
Aero-medical laboratory of the Wright Air development Center of the University of
Michigan, 1955.
[25] P. Eberhard, T. Spagele, and A. Gollhofer. Investigations for the dynamical analysis
of human motion. Multibody System Dynamics, 3:1–20, 1999.
[26] Stefano Ferrari. Una Metodologia Gerarchica per Analisi e Sintesi di Immagini
Tridimensionali. PhD thesis, Politecnico di Milano, Dipartimento di Elettronica e
Informazione. Dottorato di Ricerca in Ingegneria Informatica e Automatica.
[27] S. Fiocca. Fondamenti di Anatomia e Fisiologia Umana. Sorbona, 2000.
185

BIBLIOGRAFIA
[28] National Institute for Occupational Safety and Health (NIOSH). Musculoskeletal di-
sorders and workplace factors: a critical review of epidemiological evidences. Bernard
B ed. Cincinnati OH:DHHS NIOSH, 97-141, 1997.
[29] C. Gauss. Uber ein neues allgemeines grundgesetz der mechanik. Journal fur Reine
und Angewandte Matematik, 4:232–235, 1829.
[30] J. W. Gibbs. On the fundamental formulae of dynamics. American Journal of
Mathematics, 2:49–64, 1879.
[31] M. G. Hoy, F. E. Zajac, and M. E. Gordon. A musculoskeletal model of the human
lower extremity: the effect of muscle, tendon, and moment arm on the moment-
angle relationship of musculotendon actuators at the hip, knee, and ankle. Journal
of Biomechanics, 23:157–169, 1990.
[32] R. K. Jensen. Estimation of the biomechanical properties of three body types using
a photogrammetric method. Journal of Biomechanics, 11:349–358, 1978.
[33] M. P. Kadaba, H. K. Ramakrishnan, and M. E. Wootten. Measurement of lower
extremity kinematics during level walking. Journal of Orthopedic Research, 8:383–392,
1990.
[34] J. L. Lagrange. Mechanique Analytique. Mme Ve Coureier, Paris, 1811.
[35] J. W. Luo, J. Bai, and J. H. Shao. Application of the wavelet transforms on axial
strain calculation in ultrasound elastography. Progress in natural science, 16:942–947,
2006.
[36] S. Mari. Sviluppo e validazione di un modello per il calcolo delle coppie articolari
generate dai muscoli. Master’s thesis, Universita di Roma Tor Vergata, 2008-2009.
186
BIBLIOGRAFIA
[37] G.T. Marzan and H.M. Karara. A computer program for Direct Linear Transforma-
tion solution of collinearity condition, and some applications of it. Symposium on
Close Range Photogrammetric Systems, pages 420–476, 1975.
[38] S. McGuan. Human modeling. From bubblemen to skeletons. SAE Digital Human
Modeling for Design and Engineering Conference, pages 26–28, 2001.
[39] R. Merletti. Elettromiografia di superficie. CLUT, 1995.
[40] E. H. Moore. On the reciprocal of the general algebraic matrix. Bulletin of the
American Mathematical Society, 26:394–395, 1920.
[41] E. Pennestrı, R. Stefanelli, P. P. Valentini, and L. Vita. Virtual musculo-skeletal
model for the biomechanical analysis of the upper limb. Journal of Biomechanics,
40:1350–1361, 2007.
[42] R. Penrose. A generalized inverse of matrices. Proceedings of the Cambridge
Philosophical Society, 51:406–413, 1955.
[43] S. Siegler, P. Allard, C. Kirtley, and A. Leardini. Isb reccomendation on definitions
of joint coordinate system of various joints for the reporting of human joint motion.
part i: ankle, hip and spine. Journal of Biomechanics, 35:543–548, 2002.
[44] F. E. Udwadia. On constrained motion. Applied Mathematics and Computation,
164:313–320, 2005.
[45] F. E. Udwadia and R. E. Kalaba. A new perspective on constrained motion.
Proceedings: Mathematical and Phisical Sciences, 439:407–410, 1992.
[46] F. E. Udwadia and R. E. Kalaba. On motion. Journal of the Franklin Institute,
330:571–577, 1993.
187
[47] F. E. Udwadia and R. E. Kalaba. Analytical Dynamics: a New Approach. Cambridge
University Press, 1996.
[48] T. R. Waters, V. Putz-Anderson, and A. Garg. Applications manual for the revised
Niosh Lifting Equation. DHHS NIOSH, pages 1994–110, 1994.
[49] D. A. Winter. Biomechanics and motor control of human movement. Wiley & Sons,
1990.
[50] P. R. Wolf. Elements of photogrammetry. McGraw-Hill International, 1983.
[51] G. Wu, F. C. T. van der Helm, H. E. J. Veeger, and M. Makhsous. Isb reccomendation
on definitions of joint coordinate system of various joints for the reporting of human
joint motion. part ii: shoulder, elbow, wrist and hand. Journal of Biomechanics,
38:981–992, 2005.
[52] Seluyanov V. N. Zatsiorsky, V. M. and L. G. Chugunova. Methods of determining
mass-inertial characteristics of human body segments. In Contemporary Problems of
Biomechanics. CRC Press, Massachusetts, 1990.
[53] V. Zordan and J. Hodgins. Motion capture-driven simulations that hit and react.
In Proceedings of the 2002 ACM SIGGRAPH Eurographics symposium on Computer
animation, San Antonio, Texas, 2002.
Ringraziamenti
Ringrazio innanzitutto i miei genitori, senza l’aiuto e l’impegno dei quali non avrei mai
potuto raggiungere questo traguardo; ringrazio la mia famiglia per essermi stata vicina.
Grazie a mia sorella per le sue consulenze artistiche in tutti i campi e per avermi, a volte,
sopportato.
Ringrazio il Professor Pennestrı, senza il quale non avrei realizzato questo lavoro; lo
ringrazio anche per la sua gentilezza e pronta disponibilita, e per avermi mostrato la gioia
e la bellezza del sapere. Grazie anche al Dott. Nappi e al Dott. Rughi per aver sempre
cercato di venirmi incontro, anche quando questo comportava dover indossare tute ridicole
o saltare il pranzo.
Ringrazio Silvia, perche con lei ho condiviso questo percorso che a volte e stato anche
molto duro; la sua presenza mi e stata di grande conforto; grazie anche a Marco per aver
fatto da cavia.
Grazie a Shanna perche c’e sempre stata per me, a lei ho confidato sentimenti e paure.
Non potrei desiderare un’amica piu generosa o con maggior συµπαϑεια.
Ringrazio tutti gli amici che ho conosciuto nel percorso universitario, per me Ingegne-
ria Medica e stata come una seconda famiglia; siamo un gruppo molto unito e spero lo
rimarremo. In particolare ringrazio Giordano, per essermi stato vicino in tutti questi anni,
Nashwan, la cui gioia e dedizione verso lo studio, la vita e il prossimo rimarranno per
sempre come un faro per me, Lucia, la mia compagna di studi con la quale ho condiviso
moltissime esperienze, e Paola, perche da lei ho imparato che bisogna credere nelle pro-
prie capacita. Ringrazio anche Sandro e Andrea per la loro disponibilita e le loro piccole
attenzioni, e Ilaria per la sua gioia di vivere e il suo contagioso entusiasmo. Grazie an-
che a Diego, Giusy, Sabina, Marco, Cipro, Flavio, Annachiara, Laura, Federica, Isabella,
Raffaele e tutti gli altri, ognuno mi ha donato qualcosa di se e gliene sono grata.
Voglio ringraziare anche il Professor Maceri per aver istituito questo Corso di Laurea,
che racchiude in se le affascinanti conoscenze ingegneristiche e mediche, e per averlo reso
particolarmente difficile; dover combattere ci ha reso tutti piu uniti e probabilmente meno
superficiali.