Embed Size (px)
Citation preview

Topological Navigation in Configuration Space Applied to Soccer Robots
Gonçalo [email protected]
ISLab Presentation
Hugo [email protected]
February 2003

2 Gonçalo Neto and Hugo Costelha, 2003
Summary
MOTIVATION Topological Map Topological Navigation Experimental Results Conclusions and Future Work

3 Gonçalo Neto and Hugo Costelha, 2003
Motivation
Metrical Navigation Needs a geometric model of the world. Assumes exact sensor information. Allows a more precise navigation.
Topological Navigation Leads to a qualitative description of the navigation goals. Uses a flexible, easy to define, map. Not suitable for very precise applications.
Ideal Solution Merge both navigation models.
Metrical: local, more precise, navigation. Topological: global, less precise, navigation.

4 Gonçalo Neto and Hugo Costelha, 2003
Summary
Motivation
TOPOLOGICAL MAP Topological Navigation Experimental Results Conclusions and Future Work

5 Gonçalo Neto and Hugo Costelha, 2003
xy
12
3
4
5
6 7
8
xy
12
3
4
5
6 7
8
Training Postures

6 Gonçalo Neto and Hugo Costelha, 2003
Principal Components Analysis
Extraction of eigenimages
eigenvectors of the training images covariance matrix:
R = X XT
Use only the most significant components – higher eigenvalues.
x2
x1

7 Gonçalo Neto and Hugo Costelha, 2003
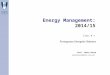
Reconstruction Square Error
Training Set
Test Set
Number of Eigenvalues Usedto construct the Space
Mea
n S
quar
e E
rror
(pe
rcen
tage
)
10
20
30
40
50
60
70
80
90
00 10 20 30
40
50
60
Test SetTraining Set
sEigenValue All
used not sEigenvalueTr
sEigenvalue All
Error Square MeanTe

8 Gonçalo Neto and Hugo Costelha, 2003
Topological Map Construction
The map should be useful to the application in question.
Can be represented as a directed graph where: Nodes: correspond to key-places in the map. Transitions: used to travel between key-places.
In robotic soccer, one could have: Nodes: field zones (half-field, penalty areas). Transitions: basic movements (turn left, move forward).

9 Gonçalo Neto and Hugo Costelha, 2003
FYG
NYGR
NYGL
NOG3
FBG
NOG4NOG2NOG1
NBGR
NBGL
mfgr
mfgrTopological Map Description
rr: Rotate Right. rl: Rotate Left. mfgr: Move Forward (with) Goal (on
the) Right. mfgl: Move Forward (with) Goal (on
the) Left. mb: Move Backward.
FYG
NYGR
NYGL
rr rl
mfgr
NOG3
FBG
NOG4NOG2NOG1
NBGR
NBGLmfgl
mfgr
rl rr
rlrr
rlrr
rl
rl
rr
rr
rl rr
rr rl rl rr
rrrl
mb
mb
mb
mfgl
mb
mb
mb
mfgr
mfgl
mfgr
mfgl
NBGL: Near Blue Goal (with goal on the) Left.
NBGR: Near Blue Goal (with goal on the) Right.
FBG: Far Blue Goal. NYGL: Near Yellow Goal (with goal on
the) Left. NYGR: Near Yellow Goal (with goal on
the) Right. FYG: Far Yellow Goal. NOG: NO Goal.

10 Gonçalo Neto and Hugo Costelha, 2003
Summary
Motivation Topological Map
TOPOLOGICAL NAVIGATION Experimental Results Conclusions and Future Work

11 Gonçalo Neto and Hugo Costelha, 2003
Map Localization
Essential step for navigation (topological or metrical).
In the topological case, it’s equivalent to identify in which node (of the graph) the robot is.
Might be expressed as a classification problem. Projection of the image to be classified in the eigenspace. Comparison with the training images projection. Make use of k-nearest neighbour method to localize the robot
in a node/class. Several metrics can be used.

12 Gonçalo Neto and Hugo Costelha, 2003
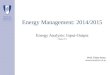
Localization: Simulated Images
X and variable
Y = 1.1 (m)
0
180
360
-5 0 5
x
NBGLNBGRFBGNYGLNYGRFYGNOG
x
y

13 Gonçalo Neto and Hugo Costelha, 2003
Localization: Real Images
X, Y and variable
NBGLNBGRFBGNYGLNYGRFYGNOG
x
y-4 4-1-3 31-2 20
1
-1
-2
2
0

14 Gonçalo Neto and Hugo Costelha, 2003
Path Generation
Use of search algorithms, applied to the graph. Large Graphs:
Define an heuristic. use A*.
Small Graphs (present case): simple search, so it’s not worthy to use an heuristic. reduce A* to uniform cost search or breadth-first search.

15 Gonçalo Neto and Hugo Costelha, 2003
Path Following
Ideally, it corresponds to the sequential execution of the transitions defining the generated path.
Nevertheless…
Dynamic environment subject to sudden changes. Some transitions show more than 50% failures.
A failure detection and new path generation mechanism is needed.

16 Gonçalo Neto and Hugo Costelha, 2003
Summary
Motivation Topological Map Topological Navigation
EXPERIMENTAL RESULTS Conclusions and Future Work

17 Gonçalo Neto and Hugo Costelha, 2003
Experimental Results
Video 1 The border regions are in
the midfield zone.
Video 2 The border regions are
between the midfield area and the penalty area.

18 Gonçalo Neto and Hugo Costelha, 2003

19 Gonçalo Neto and Hugo Costelha, 2003

20 Gonçalo Neto and Hugo Costelha, 2003
Summary
Motivation Topological Map Topological navigation Experimental Results
CONCLUSIONS AND FUTURE WORK

21 Gonçalo Neto and Hugo Costelha, 2003
Conclusions
Presents promising results concerning navigation between key-places.
Allows a easy/quick learning of the world’s relevant characteristics, thus adapting itself easily to different environments.
Flexible to different topological maps. Makes possible to specify the goals using
qualitative languages. Assumes the use of a failure control mechanism.

22 Gonçalo Neto and Hugo Costelha, 2003
Future Work
RoboCup Challenge 4 – Play with an arbitrary FIFA ball
A ball is presented to the robot for 60 seconds. The robot should search for the ball and score. Three different balls are used .
Solution: Principal Component Analysis to store a priori information
regarding the ball. Topological Navigation to drive the robot to the ball. Use implemented behaviours in the actual SocRob project to
lead the ball to the opponent’s goal.

23 Gonçalo Neto and Hugo Costelha, 2003
Thanks for your attention!!!
Gonçalo [email protected]
Hugo [email protected]
http://b52.ist.utl.pt/costelha/socrob/index.htm

24 Gonçalo Neto and Hugo Costelha, 2003

25 Gonçalo Neto and Hugo Costelha, 2003
Appendix

26 Gonçalo Neto and Hugo Costelha, 2003
Camera Simulator
Allows: Speedup of the development process. More flexible development, robot independent. Obtain results faster.
Implemented in VRML (Virtual Reality Modelling Language). Platform independent (Linux vs Windows©). Interaction with Matlab© and JAVA™. Makes possible the use various environment
conditions and textures.

27 Gonçalo Neto and Hugo Costelha, 2003
Images: Real vs Simulated
Simulated image Real Image

28 Gonçalo Neto and Hugo Costelha, 2003
___________

29 Gonçalo Neto and Hugo Costelha, 2003
Discretization Model
Discretization Type: Uniform:
More flexible. No need of a priori knowledge. Allows the definition of various topological maps.
Non uniform: More precise. Specific application oriented.
Compromise in the images number: Low: might not correctly represent the field. High: might become too computationally costly.
Present case: Uniform Discretization. Discretization intervals: x=1m ; y=1m ; =45º

30 Gonçalo Neto and Hugo Costelha, 2003
___________

31 Gonçalo Neto and Hugo Costelha, 2003
Nodes images association
Based upon geometric characteristics, defined by the modes.
Use of a discretization grid.
Thus allowing: Changes in the key-place associated with each node (by
changing the images). Definition of various maps, using the same discretization
grid.

32 Gonçalo Neto and Hugo Costelha, 2003
Nodes images association
FYG
NYGR
NYGL
rr rl
mfgr
NOG3
FBG
NOG4NOG2NOG1
NBGR
NBGLmfgl
mfgr
rl rr
rlrr
rlrr
rl
rl
rr
rr
rl rr
rr rl rl rr
rrrl
mb
mb
mb
mfgl
mb
mb
mb
mfgr
mfgl
mfgr
mfgl

33 Gonçalo Neto and Hugo Costelha, 2003
__________

34 Gonçalo Neto and Hugo Costelha, 2003
Computational Cost Reduction
R decomposition too costly! However… The R = XXT non-zero eigenvalues are the same of A = XTX. The eigenvectors of R might be obtained from the A’s ones
and from the training images (centred on the origin).
vR = (A)-½ X vA
It is still necessary to store all the training images. But… Only the most significant R’s eigenvectors. One can use an iterative procedure to compute them.

35 Gonçalo Neto and Hugo Costelha, 2003
__________

36 Gonçalo Neto and Hugo Costelha, 2003
Parameterization Comparison
K Metric Mean Classification Time (s)
1 Euclidian 0.129
1 Weighed 0.153
5 Euclidian 0.141
5 Weighed 0.169
10 Euclidian 0.160
10 Weighed 0.183

37 Gonçalo Neto and Hugo Costelha, 2003
__________

38 Gonçalo Neto and Hugo Costelha, 2003
Failure Percentage