Embed Size (px)
Citation preview

lable at ScienceDirect
Progress in Nuclear Energy 71 (2014) 269e278
Contents lists avai
Progress in Nuclear Energy
journal homepage: www.elsevier .com/locate/pnucene
Topographical clearing differential evolution: A new method to solvemultimodal optimization problems
Wagner F. Sacco a,*, Nélio Henderson b, Ana Carolina Rios-Coelho a
a Instituto de Engenharia e Geociências, Universidade Federal do Oeste do Pará, Av. Vera Paz, s/n, Santarém, PA 68135-110, BrazilbDepto. de Modelagem Computacional, Instituto Politécnico, Universidade do Estado do Rio de Janeiro, R. Bonfim, 25, Nova Friburgo, RJ 28625-570, Brazil
a r t i c l e i n f o
Article history:Received 28 October 2013Received in revised form15 December 2013Accepted 16 December 2013
Keywords:Reactor core design optimizationCombinatorial optimizationNiching methodsClearingTopographical heuristicDifferential evolutionRandom keys
* Corresponding author. Instituto de EngenhariaFederal do Oeste do Pará, Rua Vera Paz, s/n, Salé, SanTel.: þ55 93 8402 6503; fax: þ55 93 2101 4902.
E-mail addresses: [email protected], wF. Sacco).
0149-1970/$ e see front matter � 2013 Elsevier Ltd.http://dx.doi.org/10.1016/j.pnucene.2013.12.011
a b s t r a c t
Some optimization problems in the field of nuclear engineering, as for example incore nuclear fuelmanagement and a nuclear reactor core design, are highly multimodal, requiring techniques that over-come local optima, which can be done using niching methods. In order to do so, we present a newniching method based on the clearing paradigm, Topographical Clearing, which employs a topographicalheuristic introduced in the early nineties, as part of a global optimization method. This niching method isapplied to differential evolution, but it can be used in other evolutionary or swarm-based methods, suchas the genetic algorithm and particle swarm optimization. The new algorithm, called TopoClearing-DE, isfavorably compared against the canonical version of differential evolution in two test problems: theaforementioned core design and the turbine balancing problem, which is an NP-hard combinatorialoptimization problem that can be used to assess the potential of an algorithm to be applied to fuelmanagement optimization. As the problems attacked are quite challenging, the results show thatTopographical Clearing can be applied to populational optimization methods in order to solve nuclearscience and engineering problems.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Some optimization problems in the field of nuclear engineeringare highly multimodal, remaining a great challenge for mostmethods. The most notorious problem is the incore fuel manage-ment (Carter, 1997; Turinsky, 2010), which is a large search spaceproblem with w1012 possible configurations and w1010 local op-tima (Galperin, 1995).
Another multimodal problem is a nuclear reactor core designoptimization introduced by Pereira et al. (1999), which has beenattacked by other researchers (Sacco et al., 2004; Domingos et al.,2006; for example). In this work, we address the latter problem,and also an NP-hard (Garey and Johnson, 1979) problem that be-longs, as well as nuclear fuel management, to the class of combi-natorial optimization problems (Papadimitriou and Steiglitz, 1998):the turbine balancing problem (Mosevich, 1986). Therefore, opti-mization algorithms that are successful in this problem are prone toperform well in the nuclear problem.
e Geociências, Universidadetarém, PA 68035-110, Brazil.
All rights reserved.
In these multimodal problems, the search space should bethoroughly explored so that the optimization algorithm does notconverge to a local optimum. To overcome this difficulty, manysolutions have been proposed: a parallel genetic algorithm (Pereiraand Lapa, 2003), a niching method (Mahfoud, 1995) applied togenetic algorithms (Sacco et al., 2004), a hybrid algorithm that al-ternates exploration and exploitation of the search space (Saccoet al., 2008), and a new mutation scheme (Sacco and Henderson,2014) applied to differential evolution (Storn and Price, 1997).
Niching methods are techniques designed to maintain popula-tional diversity in evolutionary or swarm-based methods, sothat multiple optima are determined in multimodal problems.These optima may consist in more than one global optimum andsome local minima, or in a single global optimum and many localminima. Most niching methods are based on one of the followingschemes:
1. Fitness sharing (Goldberg and Richardson, 1987), which mod-ifies the search landscape by reducing the payoff in denselypopulated regions (Sareni and Krähenbühl, 1998).
2. Crowding (De Jong, 1975), where a new individual replaces itsmost similar element in the population.
3. Clearing (Pétrowski, 1996), where the best members of thepopulation, the so-called dominants, receive the entire payoff.

W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278270
The three main niching methods have been applied to the dif-ferential evolution algorithm, which we use in this work. See, forexample, Thomsen (2004), Yang et al. (2008), and Qu et al. (2012).For a brief survey, see Das and Suganthan (2011). For a moredetailed exposition, the reader should refer to Rönkkönen (2009).
Sareni and Krähenbühl (1998) tested these three nichingschemes applied to the genetic algorithm, concluding that clearingis the best, provided that the niching radius s that delimits eachdominant’s territory is correctly estimated. This is the drawback ofthis method, especially in real-world problems, where the searchspace is generally unknown beforehand.
In order to overcome this limitation, Sacco et al. (2004) pro-posed a variant of clearing where the individuals are clusteredusing Fuzzy Clustering Means (FCM, Bezdek, 1981) and each clusterhas a dominant individual. However, FCM requires the number ofclusters as input and is rather complicated.
With the same motivation, Qu et al. (2012) proposed anensemble of clearing differential evolution algorithms, where theinitial population is divided into three equal subpopulationsP1; P2; and P3; which receive radii sP1 ¼ 0:005*SR; sP2 ¼ 0:01*SR;and sP3 ¼ 0:05*SR; where SR is the problem’s search range. Thesesubpopulations exchange information during the selection phase.This scheme increases clearing’s efficiency, but is still dependent ofs.
In this paper, we propose a method based on the clearingparadigm which is simpler than the schemes introduced by Saccoet al. (2004) and Qu et al. (2012). It uses a clustering heuristicbased on the topographical information on the objective function,which was part of an optimization algorithm proposed by Törn andViitanen (1992), the Topographical Algorithm (TA). Recently, Saccoand Henderson (2014) used this heuristic in a new mutationoperator applied to DE. In this work, we employ the topographicalheuristic with the purpose of determining the dominant individualin a neighborhood. Originally, Törn and Viitanen (1992) used thismechanism to determine minima from a set of sampled points, sothat they were initial solutions for a local optimization algorithm.We apply this clearing variant, called topographical clearing, todifferential evolution, which outperformed the more popular ge-netic algorithm and particle swarm optimization in extensive ex-periments (Vesterstrøm and Thomsen, 2004). However, thismethod can be applied to any evolutionary or swarm-basedtechnique.
The remainder of the paper is described as follows. The opti-mization problems are described in Section 2. The description of DEis presented in Section 3. The new niching method is introduced inSection 4, as well as its application to DE. The computational ex-periments and their discussions are in Section 5. Finally, the con-clusions are made in Section 6.
2. The optimization problems
2.1. The nuclear reactor core design problem
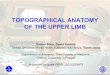
Let us describe the optimization problem (for a more detailedexposition, see Pereira et al., 1999): consider a cylindrical 3-enrichment-zone reference reactor, with a typical cell composedby moderator (light water), cladding and fuel. Fig. 1 illustrates suchreactor. The design parameters that may be varied in the optimi-zation process, as well as their variation ranges, are shown inTable 1. The materials are represented by discrete variables.
The objective of the optimization problem is to minimize theaverage flux or power peaking factor, fp, of the proposed reactor,allowing the reactor to be sub-critical or super critical(keff ¼ 1.0 � 1%), for a given average flux f0. Let X¼ {Rf, Dc, Re, E1, E2,
E3,Mf,Mc} be the vector of design variables. Then, the optimizationproblem may be written as
Minimizefp (X)Subject to:
fðXÞ ¼ f0; (1)
0:99 ¼ keff ðXÞ ¼ 1:01; (2)
dkeffdVm
> 0; (3)
Xli � Xi � Xu
i ;1;2.;6 (4)
Mf ¼ fUO2 or U�metalg; (5)
Mc ¼ fZircaloy� 2; Aluminium or Stainless Steel� 304g;(6)
where Vm is the moderator volume, and the superscripts l and uindicate respectively the lower and upper bounds (of the feasiblerange) for each design variable.
The HAMMER system (Suich and Honeck,1967) was used for celland diffusion equations calculations. It performs a multigroupcalculation of the thermal and epithermal flux distribution from theintegral transport theory in a unit cell of the lattice (Duderstadt andHamilton, 1976),
fðrÞ ¼Z
V
e�St jr�r0 j
4pjr� r0j2$Sðr0Þ$d3r0: (7)
The integral transport equation for scalar flux 4(r), where r isthe position vector, is solved for all sub-regions of the unit cell,being the neutron source S(r) isotropic into the energy group underconsideration. The transfer kernel in Equation (7) is related to thecollision probabilities for a flat isotropic source in the initial region.The solution is initially performed for a unit cell in an infinite lat-tice. The integral transport calculation is followed by a multigroupFourier transfer leakage spectrum theory in order to include theleakage effects in the previous calculation and to proceed with themultigroup flux-volume weighting.
Using the four group constants obtained from the mentionedprocedure, a one-dimensional multi-region reactor calculation isperformed. The diffusion equation (Duderstadt and Hamilton,1976)is, then, solved to perform standard criticality calculation,
� V/
DgðrÞV/
fgðrÞþSt;gðrÞfgðrÞ ¼X4g0 ¼1
"1keff
cg0Sfg0 ðrÞ
þSsg0gðrÞ#fg0 ðrÞ;
(8)
where r is the position vector; Dg is the diffusion coefficient forgroup g; 4g is the neutron flux for group g;
Pt,g is the total group
cross section for group g; keff is the effective multiplication factor;cg0 is the group fission spectrum for group g0;
Pfg’ is the fission
group cross section for group g0;P
sg0g is the scattering cross sectionform group g’ to g, and fg0 is the neutron flux for group g’:
The flux 4g(r) is calculated assuming normalized source density.Equation (8) is solved using the finite difference method and acomputational mesh with constant spacing in the spatialcoordinate.

W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278 271
The fitness function is given by
f ¼
8>>>>>>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>>>>>>:
fp; Dkeff � 0:01;D4 � 0:0140;D0keffDVm > 0
fp þ r1$Dkeff ; Dkeff > 0:01;D4 � 0:0140;D0keffDVm > 0
fp þ r2$D4; Dkeff � 0:01;D4 > 0:0140;D0keffDVm > 0
fp þ r3$D’keffDVm; Dkeff � 0:01;D4 � 0:0140; D
D0keffDVm < 0
fp þ r1$Dkeff þ r2$D4; Dkeff > 0:01;D4 > 0:0140;D0keffDVm > 0
fp þ r1$Dkeff þ r3$D0keffDVm; Dkeff > 0:01;D4 � 0:0140;
D0keffDVm < 0
fp þ r2$D4þ r3$D0keffDVm; Dkeff � 0:01;D4 > 0:0140;
D0keffDVm < 0
fp þ r1$Dkeff þ r2$D4þ r3$D0keffDVm; Dkeff > 0:01;D4 > 0:0140;
D0keffDVm < 0
; (9)
andwas developed in such away that, if all constraints are satisfied,it has the value of the average peak factor, fp, otherwise, it ispenalized proportionally to the discrepancy on the constraint. Suchpenalization factors should be setup by the expert, according to therequirements and the priorities of the problem, being weighted bythe coefficients ri, with i ¼ 1, 2, 3.
2.2. The turbine balancing problem
This NP-hard practical problem was originally proposed byMosevich (1986) as a combinatorial optimization problem, but itwas also formulated as a quadratic assignment problem (Laporteand Mercure, 1988). Since then, it has been attacked by other re-searchers, using both formulations and different kinds of turbines(Sinclair, 1993; Amiouny et al., 2000; Pitsoulis et al., 2001; Choi andStorer, 2004).
In thiswork, we solve the case presented byMosevich (1986). Theproblem consists in balancing the runners of a Francis hydraulicturbine. Sinclair (1993) gives a precise description of the problem tobe solved: “A hydraulic turbine runner consists essentially of a cyl-inder with blades attached to its circumference. The turbine rotatesas water flows across the blades. During the manufacturing processthe individual blades must be welded into place, equally spacedaround the cylinder. The problem encountered during this phase isthe static balancing of the completed runner. Because of thecomplexity of the manufacturing process, the final weights of theblades may differ substantially. The result is an unbalanced runner.
Fig. 1. (a) The nuclear reacto
Since the runner can rotate at very high revolutions during use, it iscrucial that the unbalance be as small as possible, otherwise thebearings onwhich the runners rotatewill wear out very quickly.”Wemust add that, according to Mosevich (1986), the variations in finalweight mentioned above can be as great as �5%.
Let us formulate the problem, following Mosevich (1986). Therunner is modeled as n equally-spaced weights on a circle of zeromass and radius r equal to the common distance from the bladecenters-of-mass to the runner axis. The blade positions are labeledcounterclockwise, starting at position 1 ¼ (r,0) in an x � y coordi-nate system, receiving indexes k ¼ 1;2;.;n: Let Pt be a configu-ration of blades where Pt(j)¼ k assigns blade k to position j. First, wedefine the following variables:
Mk ¼ mass of blade k;Mk ¼ mass of blade k when in position j;qj ¼ ð2p=nÞðj� 1Þ ¼ angle between position j and position 1;
j ¼ 1;.;n;M ¼ total mass of blades ¼ Pn
k¼1Mk:
Then, each permutation Pt determines a center of mass ðx; yÞgiven by:
xðPtÞ ¼ 1M
Xnj¼1
Mkj r cos qj; (10)
r and (b) its typical cell.

Table 1Range of parameters.
Parameter Symbol Range
Fuel radius (cm) Rf 0.508 to 1.270Cladding thickness (cm) Dc 0.025 to 0.254Moderator thickness (cm) Re 0.025 to 0.762Enrichment of zone 1 (%) E1 2.0 to 5.0Enrichment of zone 2 (%) E2 2.0 to 5.0Enrichment of zone 3 (%) E3 2.0 to 5.0Fuel material Mf {U-metal or UO2}Cladding material Mc {Zircaloy-2, aluminum
or stainless steel-304}Fig. 3. Function initialize.
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278272
yðPtÞ ¼ 1M
Xnj¼1
Mkj r sin qj: (11)
Finally, Eqs. (10) and (11) define deviation D;
DðPtÞ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffijxðPtÞj2 þ jyðPtÞj2
q; (12)
which is the objective function to be minimized. DðPtÞ ¼ 0 meansthat a perfect static balance has been reached (Mosevich, 1986).
As suggested by Mosevich (1986), we scale the problem makingr ¼ 1. We use n ¼ 14 blades, as a typical runner has between 14 and18 blades (Mosevich, 1986), and this value of n is one of the mostdifficult to optimize (Laporte and Mercure, 1988). Regarding thevalues of Mk, we follow Laporte and Mercure (1988), generating nnumbers according to a normal distributionwith amean of 100 anda standard deviation of 5/3, so that most Mks fall within �5% of themean. We generated these numbers using a Gaussian RandomNumber Generator available at Random.org (2012).
3. The differential evolution algorithm
In its canonical version, introduced by Storn and Price (1997), DEis applied to the minimization of an objective function f(x), where xis a continuous variable vector with domain ½low;up�3Rn:
The algorithm is outlined in Fig. 2 and its operators initialization,mutation, crossover and selection are respectively described inFigs. 3e6. The input parameters, which remain constant along the
Fig. 2. The canonical DE algorithm.
optimization process, are the population size NP and, to beexplained below, the crossover rate CR and the scaling factor F.
First of all, as seen in Fig. 3, an initial population is generatedwith each component j of each individual i initialized in the range[lowj, upj]. In its canonical version, the individuals are generated atrandom. Each initial solution or individual must meet the boundaryconstraints.
Afterward, inside a loop, the evolutionary process starts until astopping criterion is satisfied. The first operation inside the loop ismutation, described by function “mutate”, in Fig. 4. In this opera-tion, a trial solution, or perturbed individual bxi, is generated foreach individual i as in
bx i ¼ Xpð1Þ þ F�Xpð2Þ � Xpð3Þ
�; (13)
where p(1), p(2), and p(3) are random indexes mutually differentfrom each other and different from index i, and F is a scaling factorin the range [0,2]. The solution correspondent to the first randomindex, xp(1), is known as the base vector, or “donor”. This vector ismodified by the addition of the weighted difference of the twoother solutions with indexes p(2) and p(3). The operation isrepeated as long as trial solution bxi is outside the domain.
After mutation, the population goes through crossover, as inFig. 5. In this operation, component j of offspring yi is found from itsparents xi and bx i according to the rule
Fig. 4. Function mutate.

Fig. 5. Function crossover.
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278 273
yji ¼n bxj
i; if Rj � CR or j ¼ Ii
xji; otherwise; (14)
where Ii is a random integer in the range [1,n], Rj is a randomnumber in [0, 1], and crossover rate CR, also in [0, 1], controls thefraction of parameter values that are copied from the trial solutionbx i: Note that the alternative j ¼ Ii assures that at least onecomponent will receive a mutated value.
Finally, the selection process (Fig. 6) defines the population ofnext generation as
xNiterþ1i ¼
(yNiteri ; if f
�yNiteri
� � f�xNiteri
�xNiteri ; otherwise
(15)
4. Topographical clearing
4.1. Clearing
As mentioned in the Introduction, in clearing the best membersof the population, the so-called dominants, receive the entirepayoff. This procedure is applied after evaluating the fitness of theindividuals and before applying the selection operator (Pétrowski,1996). The clearing radius s defines a range inside all but the k
individuals having the best fitnesses are cleared (Rönkkönen,2009), i.e., have their objective function values zeroed for a
Fig. 6. Function select.
maximization problem or receive a large value for a minimizationproblem. The population members distant more than s from adominant individual are not affected.
Fig. 7, based on Pétrowski (1996), shows the function that per-forms the original clearing method. Function SortFitness(P) sortsthe population P in decreasing order of fitness, so that the firstelements of the list are the dominants, if it is a maximizationproblem, or in increasing order, for minimization problems.
4.2. The topographical algorithm
Between the early seventies and mid-nineties, a global optimi-zation paradigm based on clustering was studied by some re-searchers, mainly in Europe. The seminal article by Becker and Lago(1970) was followed by, among others, Törn (1973, 1978), Timmer(1984), Törn and Viitanen (1992, 1994), and Ali and Storey (1994).Ali (1994), and Levi and Haas (2010) present fine reviews on theclustering methods. According to Törn and �Zilinskas (1989), themotivation for exploring clustering methods in based on thefollowing:
a. It is possible to obtain a sample of points in the search spaceconsisting of concentration of points in the neighborhood oflocal minimizers of the objective function f.
b. The points in the sample can be clustered giving clusters iden-tifying the neighborhoods of local minimizers and thuspermitting local optimization methods to be applied.
The original TA is non-iterative and based on the exploration ofthe search space (Ali and Storey, 1994). It consists of three steps(Törn and Viitanen, 1994):
1. A uniform random sampling of N points in the search space.2. The construction of the topograph, which is a graph with
directed arcs connecting the accepted sampled points on a k e
nearest neighbors basis, where the direction of the arc is to-wards a point with a larger function value. The minima of thegraph are the points better than their neighbors, i.e., the nodeswith no incoming arcs.
3. The topograph minima are starting points for a local optimiza-tion algorithm. The best point obtained from all the executionsusing each minimum as the initial solution is the result of thealgorithm.
Fig. 7. The clearing procedure, as proposed by Pétrowski (1996).

Fig. 8. The topographical clearing DE.
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278274
Originally, Törn and Viitanen (1992, 1994) obtained the initialsolutions from step 1 sampling points in a unit hypercube, until Npoints with their nearest neighbors farther than a threshold dis-tance d were obtained. Then, these points were denormalized. Butthese authors add that any other method that produces a veryuniform covering can be used. In fact, they used the more efficientquasi-random sampling in an iterative version of TA (Törn andViitanen, 1996). In their tests, Törn and Viitanen (1994) usedmostly N ¼ 100 or N ¼ 200.
Step 2, the construction of the topograph, is the heart of themethod. First of all, aN�N symmetric distancematrix is computed.Following that, a N � k matrix called kNN e matrix is constructedcontaining, for each point, the indexes of its k e nearest neighborssorted by distance. Next, this matrix, which is an undirectedtopograph, is transformed into a directed topograph indicating ifthe reference is to a point with larger or smaller objective functionvalue by giving the reference a plus or minus sign, respectively (Ali,1994). The signs represent the directed arcs in the graph, a positivesign representing the “arrow head” of the arc, and the negative signthe “start” of the arc (Törn and Viitanen, 1994). Finally, the pointsthat correspond to rows with only positive signs are the topographminima.
Let us illustrate how the topographical heuristic works by asimple illustrative example, adapted from Ali (1994). Suppose wewant to minimize the function
f ðx; yÞ ¼ x2 þ y2; (16)
and that six points were sampled and their function values calcu-lated: f(P1) ¼ f(2,5) ¼ 29, f(P2) ¼ f(1,2)¼5, f(P3) ¼ f(3,4) ¼ 25,f(P4) ¼ f(0,1) ¼ 1, f(P5) ¼ f(5,0) ¼ 25, and f(P6) ¼ f(4,2) ¼ 20.
First, the symmetric squared distance matrix D is constructed,where, for example, the element d13 corresponds to the distancebetween P1 and P3:
D ¼
266666640 10 2 20 34 1310 0 8 2 20 92 8 0 18 20 520 2 18 0 26 1734 20 20 26 0 513 9 5 17 5 0
37777775: (17)
Following that, the kNN e matrix is formed by each point’s k e
nearest neighbors. Using k¼ 3, the nearest neighbors of P1 (the firstrow of D) are the points with indexes 3, 2, and 6, respectively. Theseelements will constitute the first row of the matrix. The processgoes on until the following matrix is obtained:
kNN ¼
266666643 2 64 3 61 6 22 6 36 2 33 5 2
37777775: (18)
This matrix represents an undirected graph. Computationally, itis obtained sorting each row of D and taking the first k elements’indexes. The elements of the main diagonal of D receive a very largevalue (e.g., 108) before sorting, so that they are not included in thekNN e matrix.
Now, the elements of kNN will receive a plus or minus signaccording to their functional values in relation to the value of thepoint represented by the row index. The second row, for example,corresponds to P2, whose function value is equal to 5, which is morethan f(P4) ¼ 1 (P4 is element knn21), but less than f(P3) ¼ 25 andf(P1) ¼ 29 (elements knn22 and knn23, respectively). Therefore,
knn21 will receive a minus sign and the other two elements a plussign. The signed matrix becomes
kNN ¼
26666664�3 �2 �6�4 þ3 þ6þ1 �6 �2þ2 þ6 þ3�6 �2 þ3�3 þ5 �2
37777775: (19)
As the only point that corresponds to a row with only positivesigns is P4 ¼ (0, 1), this will be the starting point for a local opti-mization algorithm. When implementing the topographical heu-ristic, the signs can be attributed in the process of construction ofkNN.
In step 3, Törn and Viitanen (1994) say that any local optimi-zation method can be used. They employed a gradient-based al-gorithm, as their tests were performed on algebraic test functions.
4.3. The new method
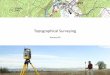
As mentioned in Section 1, the new method based on theclearing paradigm is much simpler than those available in theliterature. The topographical heuristic is applied to the populationand the topograph minima are determined and flagged (functiontopograph in Fig. 8). These minima receive the value flagi ¼ 1, andthe others remainwith flagi ¼ 0 that was previously assigned for allthe individuals. Then, clearing (function topoclearing in the samefigure) is applied as follows: the non-flagged individuals arecleared, receiving a large function value (as we are working withminimization problems), while the topograph minima are notpunished, maintaining their original values. This scheme isdescribed by Fig. 9. Note that our new method does not requireparameters s and k, neither the sorting of individuals by fitnessvalue, which is a computationally expensive procedure.

Fig. 9. The new clearing procedure, using topographical information on the solutions.
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278 275
Finally, the selection is performed, as in Fig. 10. The decision onwhether to replace or not the current solution by the new one ismade based on the cleared fitness values.
5. Results and discussion
5.1. Implementation and setup
TopoClearing-DE was implemented in the Cþþ programminglanguage. For the stochastic part of this algorithm, we used thepseudorandom number generating algorithm developed byMatsumoto and Nishimura (1998), the Mersenne Twister, which isfreely available for download at one of its creators’ website(Matsumoto, 2011).
For the nuclear core optimization problem, our source code wasconnected to the HAMMER reactor physics code (Suich and Honeck,1967), which calculates the objective function value for each solu-tion proposed by the optimization algorithm. As mentioned in thedescription of this problem, there are two discrete decision vari-ables, Mf and Mc. As the DE algorithms are designed for continuousoptimization, we handled these variables as in Sacco et al. (2009).The possible fuel and cladding materials received integer indexes,but throughout the optimization process were treated as contin-uous variables which were truncated only for purposes of objectivefunction evaluation. Hence, the two possible fuel materials andthree possible cladding materials received, respectively, indexes 0,1 and 0, 1, 2, being treated as continuous variables in the intervals[0, 2) and [0, 3).
As the turbine balancing problem only deals with discrete var-iables, we need to adapt DE for combinatorial optimization. In orderto do so, we employ a representation technique named random
Fig. 10. The new function select, which uses the cleared fitness values.
keys (Bean, 1994). This mechanism, originally designed for thegenetic algorithm, allows us to treat discrete problems as if theywere continuous. The solution is translated into a discrete sequenceonly in the moment of the objective function evaluation. Let usshow how it works with a simplified example: a six-blade turbine.DE works with six continuous variables, all in the range [0, 1]. Let ussuppose we have a solution S1, given by
S1 ¼ ð0:18;0:73;0:42;0:87;0:01;0:23Þ: (20)
Each one of these variables receives an integer index, here insubscripts, corresponding to their order of appearance:
S1 ¼ ð0:181;0:732;0:423;0:874;0:015;0:236Þ: (21)
Then, these real numbers (the so-called random keys) aresorted:
S1 sorted ¼ ð0:015;0:181;0:236;0:423;0:732;0:874Þ: (22)
The subscripts represent a valid sequence S01 :
S01 ¼ ð5;1;6;3;2;4Þ: (23)
Note that, even in an extreme case with repeated real numbers,a valid sequence is produced:
S2 ¼ ð0:93;0:27;0:93;0:45;0:11;0:93Þ; (24)
S2 ¼ ð0:931;0:272;0:933;0:454;0:115;0:936Þ; (25)
S2 sorted ¼ ð0:115;0:272;0:454;0:931;0:933;0:936Þ; (26)
S02 ¼ ð5;2;4;1;3;6Þ: (27)
The parameters for DE are the same as in Sacco et al. (2013,Sacco and Henderson,2014): NP ¼ 100, F ¼ 0.5, and CR ¼ 0.9, beingwidely employed in the literature (see Vesterstrøm and Thomsen,2004; Ali and Törn, 2004; Rahnamayan et al., 2007; for example).For the turbine balancing problem, due to its high level of difficulty,we also used NP ¼ 200 and NP ¼ 500.
For the topographical heuristic inside the niching method, weused k ¼ 10, as Törn and Viitanen (1994), and also tested k ¼ 20.
For the nuclear reactor core design, the algorithmswere setup tostop at 100,000 objective function evaluations, so that the resultswere obtained with the same maximum computational effort asprevious results (Pereira et al., 1999; Sacco et al., 2008, 2009, 2013;Sacco and Henderson, 2014). Each execution took about 5 h in anIntel� Core� i7 PC with 12 Gb RAM. The bulk of the effort is takenup by the fitness evaluations by the reactor physics code. We per-formed ten independent executions for each version, using a set often previously selected random seeds in all of them, so that therewould be no bias on the quality of the results obtained.
As the turbine balancing problem has a known global minimum,the algorithms were run using the same termination criterion as,for example, in Siarry et al. (1997), Hirsch et al. (2007), and Rios-Coelho et al. (2010), which is ideal for an algorithm’s perfor-mance assessment:
jf ðX*Þ � f ðXÞj � ε1jf ðX*Þj þ ε2; (28)
where f(x*) is the global minimum, f(x) is the current best, ε1 ¼10�4
corresponds to the relative error and ε2 ¼ 10�6 corresponds to theabsolute error (Siarry et al., 1997). We set a maximum number ofgenerations equal to 100,000 for all population sizes as a stoppingcriterion, in case the condition given by Eq. (28) is not achieved.

Table 2Results for ten experiments of the canonical DE algorithm (from Sacco et al., 2013).
Experiment Rf (cm) Dc (cm) Dm (cm) E1 (%) E2 (%) E3 (%) Mf Mc Fitness NFE
#1 0.7021 0.1879 0.7406 2.7532 2.8217 4.9890 U-Metal SS-304 1.2765 67,967#2 0.6818 0.1810 0.7227 2.7500 2.8843 4.9749 U-Metal SS-304 1.2767 24,832#3 0.7037 0.1881 0.7417 2.7514 2.8803 4.9864 U-Metal SS-304 1.2765 46,173#4 0.7278 0.1953 0.7606 2.7457 2.8801 4.9964 U-Metal SS-304 1.2763 49,570#5 0.7042 0.1872 0.7419 2.7450 2.8735 4.9745 U-Metal SS-304 1.2765 77,814#6 0.6812 0.1823 0.7235 2.7604 2.8953 4.9935 U-Metal SS-304 1.2767 22,468#7 0.6820 0.1789 0.7224 2.7359 2.8697 4.9478 U-Metal SS-304 1.2767 28,716#8 0.7068 0.1839 0.7423 2.7206 2.8484 4.9301 U-Metal SS-304 1.2766 28,410#9 0.6886 0.1770 0.7259 2.7109 2.8434 4.9043 U-Metal SS-304 1.2767 25,012#10 0.6886 0.1770 0.7271 2.7138 2.8462 4.9100 U-Metal SS-304 1.2767 25,271Average 0.6967 0.1838 0.7349 2.7387 2.8643 4.9607 - - 1.2766 39,623.3
Table 3Results for ten experiments of TopoClearing-DE with K ¼ 10.
Experiment Rf (cm) Dc (cm) Dm (cm) E1 (%) E2 (%) E3 (%) Mf Mc Fitness NFE
#1 0.7050 0.1867 0.7422 2.7401 2.8683 4.9655 U-Metal SS-304 1.2765 48,094#2 0.7050 0.1886 0.7425 2.7486 2.8830 4.9921 U-Metal SS-304 1.2765 99,375#3 0.7306 0.1941 0.7614 2.7309 2.8644 4.9691 U-Metal SS-304 1.2763 58,372#4 0.7288 0.1948 0.7611 2.7394 2.8738 4.9842 U-Metal SS-304 1.2763 40,603#5 0.7019 0.1867 0.7389 2.7471 2.8761 4.9789 U-Metal SS-304 1.2766 41,591#6 0.7047 0.1861 0.7412 2.7367 2.8652 4.9596 U-Metal SS-304 1.2766 34,185#7 0.7021 0.1887 0.7409 2.7585 2.8876 4.9991 U-Metal SS-304 1.2765 71,802#8 0.7046 0.1867 0.7419 2.7412 2.8695 4.9676 U-Metal SS-304 1.2765 42,306#9 0.7062 0.1864 0.7418 2.7365 2.8654 4.9602 U-Metal SS-304 1.2766 29,601#10 0.7059 0.1865 0.7428 2.7370 2.8653 4.9601 U-Metal SS-304 1.2765 58,720Average 0.7095 0.1885 0.7455 2.7416 2.8719 4.9736 e e 1.2765 52,464.9
Table 4Results for ten experiments of TopoClearing-DE with K ¼ 20.
Experiment Rf (cm) Dc (cm) Dm (cm) E1 (%) E2 (%) E3 (%) Mf Mc Fitness NFE
#1 0.7042 0.1864 0.7398 2.7383 2.8668 4.9628 U-Metal SS-304 1.2766 32,619#2 0.7015 0.1882 0.7405 2.7571 2.8862 4.9962 U-Metal SS-304 1.2765 44,119#3 0.7258 0.1940 0.7596 2.7409 2.8753 4.9853 U-Metal SS-304 1.2763 39,562#4 0.7022 0.1883 0.7407 2.7565 2.8856 4.9957 U-Metal SS-304 1.2765 76,368#5 0.7245 0.1942 0.7587 2.7440 2.8780 4.9901 U-Metal SS-304 1.2763 82,141#6 0.7023 0.1888 0.7411 2.7589 2.8883 4.9999 U-Metal SS-304 1.2765 50,525#7 0.7273 0.1931 0.7593 2.7320 2.8654 4.9696 U-Metal SS-304 1.2763 42,476#8 0.7033 0.1884 0.7418 2.7553 2.8844 4.9937 U-Metal SS-304 1.2765 64,447#9 0.7255 0.1891 0.7571 2.7123 2.8449 4.9313 U-Metal SS-304 1.2764 99,607#10 0.7015 0.1875 0.7397 2.7534 2.8824 4.9900 U-Metal SS-304 1.2766 33,268Average 0.7118 0.1898 0.7478 2.7449 2.8757 4.9815 e e 1.2765 56,513.2
Table 5Comparison with previously published best results obtained by other populational algorithms.
GAa NGAb PSOc DEd DEe TopoClearing-DE
Objectives andConstraints
Fitness 1.3100 1.2870 1.2767 1.2763 1.2763 1.2763Minimum averagepeak factor
1.3100 1.2870 1.2767 1.2763 1.2763 1.2763
Average Flux 8.02 � 10�5 8.04 � 10�5 8.07 � 10�5 8.06 � 10�5 8.06 � 10�5 8.08 � 10�5
keff 1.000 1.000 0.990 1.000 0.990 0.990Parameters Rf (cm) 0.5621 0.5441 0.7459 0.7281 0.7278 0.7258
Dr (cm) 0.1770 0.1064 0.1647 0.1932 0.1953 0.1940Dm (cm) 0.6581 0.5997 0.7620 0.7610 0.7606 0.7596E1 (%) 2.7560 2.5906 2.5364 2.7318 2.7457 2.7409E2 (%) 4.0320 2.7559 2.6608 2.6608 2.8801 2.8753E3 (%) 4.4570 4.6220 4.6067 4.9686 4.9964 4.9853Mf U-metal U-metal U-metal U-metal U-metal U-metalMc Stainless-304 Stainless-304 Stainless-304 Stainless-304 Stainless-304 Stainless-304
NFE 96,000 100,000 N.A. 95,730 49,570 39,562
a Pereira et al., 1999.b Sacco et al., 2004.c Domingos et al., 2006.d Sacco et al., 2009.e Sacco et al., 2013.
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278276

Table 6Results for the turbine balancing problem.
DE TopoClearing-DE, k ¼ 10 TopoClearing-DE, k ¼ 20
PS 100 200 500 100 200 500 100 200 500SR 10/100 48/100 85/100 29/100 49/100 86/100 31/100 53/100 90/100NFE Min. 87,310 201,657 78,140 27,692 239,410 222,135 102,613 105,917 147,673
Max. 8,280,554 18,288,967 46,394,433 9,904,947 18,706,193 49,093,657 9,268,706 19,288,215 48,357,305Avg. 3,296,290 6,314,683 14,107,599 4,315,295 9,644,177 17,610,059 4,137,400 9,486,036 18,601,053RA 0.76 0.65 0.76 1.00 1.00 0.95 0.96 0.98 1.00
W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278 277
5.2. The nuclear reactor design problem
Table 2 shows the results obtained by the canonical DE (fromSacco et al., 2013). Tables 3and 4 show the results obtained in tenindependent executions of TopoClearing-DE employing, respec-tively, k ¼ 10 and k ¼ 20. The first columns display the design pa-rameters obtained for each execution, and the two last columnsshow the objective function values (or fitness, in the evolutionaryoptimization terminology) and the number of fitness functionevaluations (NFE) necessary to reach the optimum.
Comparing Table 2 with Tables 3 and 4, we can see that Top-oClearing DE outperformed canonical DE, particularly with k ¼ 20,where the best value of 1.2763 was reached 3/10 times. The onlydrawback of the method introduced in this work is the highercomputational cost, but this can be explained due to a certaintendency of the canonical DE to converge prematurely to localoptima (Das and Suganthan, 2011).
Finally, Table 5 compares the best configuration and computa-tional cost achieved here against results available in the literatureapplying other techniques: the genetic algorithm (Pereira et al.,1999), the niching genetic algorithm mentioned in the Introduc-tion (Sacco et al., 2004), particle swarm optimization (Domingoset al., 2006), the canonical DE with another setup (Sacco et al.,2009), and DE as in Sacco et al. (2013). The results obtained bythe DE paradigm demonstrate once more for this problem (aspreviously in Sacco et al., 2009; Sacco et al., 2013; Sacco andHenderson, 2014), its superiority over the more established ge-netic algorithm and particle swarm optimization methods.
5.3. The turbine balancing problem
Table 6 compares the results obtained by TopoClearing-DE withk ¼ 10 and k ¼ 20 against those achieved by the conventional DE.The population size is denoted by PS. We performed one-hundredexecutions of each algorithm with the same independent randomseeds for all of them, so that the experiments are unbiased. SR is thesuccess rate for each algorithm and/or setup. Regarding the numberof fitness evaluations (NFE), we display the minimum, maximum,and average NFEs taking into account only the successful runs. Thelast row refers to the relative average, which was obtained dividingthe average NFE for each population size by the largest value ach-ieved by one of the three variants.
Note that TopoClearing DE with both values of k outperformedthe canonical DE for all population sizes, with a slightly better per-formance for k ¼ 20. Also note that the results obtained with one-hundred individuals show that Topographical Clearing generated ahigh diversity even with a small population for such a complexproblem. The higher computational cost than the one required by thecanonical DE was explained in the previous subsection.
6. Conclusions
In this work, we introduced a niching method to overcome localoptima of multimodal optimization problems, which are quite
common in the real world (Mahfoud, 1995). A particular problem ofthis nature is the nuclear fuel management optimization problem,which has been one of the most studied in the field of nuclearengineering (for example, Kropaczek and Turinsky, 1991; DeChaineand Feltus, 1995; Jiang et al., 2006; Meneses et al., 2009; Poursalehiet al., 2013).
The results obtained in this work demonstrate the potential oftopographical clearing, which is easy to implement and can be usedin other evolutionary or swarm-based optimization methods be-sides differential evolution. Last but not least, it does not requirethe burden of estimating the radius s (a very difficult task, espe-cially for practical problems).
Based on the results obtained here, we recommend the use ofthe Topographical Clearing DE with k ¼ 20.
As further development, we plan to solve the nuclear fuelmanagement optimization problem using the niching methodintroduced in this work. The results achieved in the turbinebalancing problem give us a good prospect.
Acknowledgements
W.F.S. and N.H. gratefully acknowledge the financial supportprovided by CNPq (Conselho Nacional de Desenvolvimento Cien-tífico e Tecnológico, Ministry of Science, Technology and Innova-tion, Brazil). The authors also would like to thank Prof. Montaz Alifor providing a copy of his doctoral thesis. The research by N.H. hasbeen carried out within the framework of project PROCIENCIA-UERJ financed by FAPERJ.
References
Ali, M.M., 1994. Some Modified Stochastic Global Optimization Algorithms withApplications. Doctoral thesis. Department of Mathematical Sciences, Lough-borough University of Technology, Loughborough, UK.
Ali, M.M., Storey, C., 1994. Topographical multilevel single linkage. J. Global Optim.5, 267e276.
Ali, M.M., Törn, A., 2004. Population set based global optimization algorithms: somemodifications and numerical studies. Comp. Oper. Res. 31, 1703e1725.
Amiouny, S.V., Bartholdi III, J.J., Vande Vate, J.H., 2000. Heuristics for balancingturbine fans. Oper. Res. 48, 591e602.
Bean, J.C., 1994. Genetics and random keys for sequencing and optimization. ORSA J.Comp. 6, 154e160.
Becker, R.W., Lago, G.V., 1970. A global optimization algorithm. In: Proceedings ofthe 8th Allerton Conference on Circuits and System Theory, Monticello, IL, USA,pp. 3e12.
Bezdek, J.C., 1981. Pattern Recognition with Fuzzy Objective Function Algorithms.Plenum Press, New York.
Carter, J.N., 1997. Genetic algorithms for incore fuel management and other recentdevelopments in optimisation. In: Lewins, J., Becker, M. (Eds.), Advances inNuclear Science and Technology, vol. 25Kluwer Academic Publishers, New York,pp. 113e154.
Choi, W., Storer, R.H., 2004. Heuristic algorithm for a turbine-blade-balancingproblem. Comp. Oper. Res. 31, 1245e1258.
Das, S., Suganthan, P.N., 2011. Differential evolution: a survey of the state-of-the-art.IEEE T. Evolut. Comput. 15, 4e31.
DeChaine, M.D., Feltus, M.A., 1995. Nuclear fuel management optimization usinggenetic algorithms. Nucl. Technol. 111, 109e114.
De Jong, K.A., 1975. An Analysis of the Behavior of a Class of Genetic AdaptiveSystems. Ph.D. dissertation. University of Michigan, Ann Arbor, MI.
Domingos, R.P., Schirru, R., Pereira, C.M.N.A., 2006. Particle swarm optimization inreactor core design. Nucl. Eng. Des. 152, 197e203.

W.F. Sacco et al. / Progress in Nuclear Energy 71 (2014) 269e278278
Duderstadt, J.J., Hamilton, L.J., 1976. Nuclear Reactor Analysis. John Wiley and Sons,New York.
Galperin, A., 1995. Exploration of the search space of the in-core fuel managementproblem by knowledge-based techniques. Nucl. Sci. Eng. 19, 144e152.
Garey, M.R., Johnson, D.S., 1979. Computers and Intractability: a Guide to the Theoryof NP-completeness. W.H. Freeman and Company, New York.
Goldberg, D.E., Richardson, J., 1987. Genetic algorithms with sharing for multimodalfunction optimization. In: Genetic Algorithms and Their Applications: Pro-ceedings of the Second International Conference on Genetic Algorithms. L.Erlbaum Associates Inc., Hillsdale, NJ, pp. 41e49.
Hirsch, M.J., Meneses, C.N., Pardalos, P.M., Resende, M.G.C., 2007. Global optimiza-tion by continuous GRASP. Optim. Lett. 1, 201e212.
Jiang, S., Ziver, A.K., Carter, J.N., Pain, C.C., Goddard, A.H.J., Franklin, S., Phillips, H.J.,2006. Estimation of distribution algorithms for nuclear reactor fuel manage-ment optimization. Ann. Nucl. Energy 33, 1039e1057.
Kropaczek, D.J., Turinsky, P.J., 1991. In-core nuclear fuel management optimizationfor pressurized water reactors utilizing simulated annealing. Nucl. Technol. 95,9e32.
Laporte, G., Mercure, H., 1988. Balancing hydraulic turbine runners: a quadraticassignment problem. Eur. J. Oper. Res. 35, 378e381.
Levi, A.F.J., Haas, S., 2010. Appendix A e global optimization algorithms. In:Levi, A.F.J., Haas, S. (Eds.), Optimal Device Design. Cambridge University Press,Cambridge, UK, pp. 262e276.
Mahfoud, S.W., 1995. Niching Methods for Genetic Algorithms. Ph.D. thesis. IllinoisGenetic Algorithm Laboratory, University of Illinois at Urbana- Champaign,Urbana, IL.
Matsumoto, M., 2011. http://www.math.sci.hiroshima-u.ac.jp/wm-mat/MT/emt.html (retrieved 10-22-2013).
Matsumoto, M., Nishimura, T., 1998. Mersenne twister: a 623-dimensionally equi-distributed uniform pseudo-random number generator. ACM Trans. Model.Comput. Simul. 8, 3e20.
Meneses, A.A.M., Machado, M.D., Schirru, R., 2009. Particle swarm optimizationapplied to the nuclear reload problem of a pressurized water reactor. Prog. Nucl.Energy 51, 319e326.
Mosevich, J., 1986. Balancing hydraulic turbine runners e a discrete combinatorialoptimization problem. Eur. J. Oper. Res. 26, 202e204.
Papadimitriou, C.H., Steiglitz, K., 1998. Combinatorial Optimization e Algorithmsand Complexity. Dover Publications, Mineola, NY.
Pereira, C.M.N.A., Schirru, R., Martinez, A.S., 1999. Basic investigations related togenetic algorithms in core designs. Ann. Nucl. Energy 26, 173e193.
Pereira, C.M.N.A., Lapa, C.M.F., 2003. Coarse-grained parallel genetic algorithmapplied to a nuclear reactor core design optimization problem. Ann. Nucl. En-ergy 30, 555e565.
Pétrowski, A., 1996. A clearing procedure as a niching method for genetic algo-rithms. In: Proceedings of the International Conference on EvolutionaryComputation 1996 (ICEC ’96), pp. 798e803.
Pitsoulis, L.S., Pardalos, P.M., Hearn, D.W., 2001. Approximate solutions to the tur-bine balancing problem. Eur. J. Oper. Res. 130, 147e155.
Poursalehi, N., Zolfaghari, A., Minuchehr, A., Moghaddam, H.K., 2013. Continuousfirefly algorithm applied to PWR core pattern enhancement. Nucl. Eng. Des.258, 107e115.
Qu, B., Liang, J., Suganthan, P.N., Chen, T., 2012. Ensemble of clearing differentialevolution for multi-modal optimization. In: Tan, Y., Shi, Y., Ji, Z. (Eds.), ICSI 2012,Part I, LNCS 7331. Springer-Verlag, Berlin, pp. 350e357.
Rahnamayan, S., Tizhoosh, H.R., Salama, M.M.A., 2007. Opposition-based differentialevolution (ODE) with variable jumping rate. In: Proceedings of the 2007 IEEESymposium on Foundations of Computational Intelligence (FOCI 2007). IEEE,Piscataway, NJ, pp. 81e88.
Random.org, 2012. Gaussian Random Number Generator. http://www.random.org/gaussian-distributions/ (retrieved 23.10.13).
Rios-Coelho, A.C., Sacco, W.F., Henderson, N., 2010. A Metropolis algorithm com-bined with Hooke-Jeeves local search method applied to global optimization.Appl. Math. Comp. 217, 843e853.
Rönkkönen, J., 2009. Continuous Multimodal Global Optimization with DifferentialEvolution-based Methods. D.Sc. thesis. Lappeenranta University of Technology,Lappeenranta, Finland.
Sacco, W.F., Machado, M.D., Pereira, C.M.N.A., Schirru, R., 2004. The fuzzy clearingapproach for a niching genetic algorithm applied to a nuclear reactor coredesign optimization problem. Ann. Nucl. Energy 31, 55e69.
Sacco, W.F., Alves Filho, H., Henderson, N., de Oliveira, C.R.E., 2008. A Metropolisalgorithm combined with Nelder-Mead Simplex applied to nuclear reactor coredesign. Ann. Nucl. Energy 35, 861e867.
Sacco, W.F., Henderson, N., Rios-Coelho, A.C., Ali, M.M., Pereira, C.M.N.A., 2009.Differential evolution algorithms applied to nuclear reactor core design. Ann.Nucl. Energy 36, 1093e1099.
Sacco, W.F., Meneses, A.A.M., Henderson, N., 2013. Some studies on differentialevolution variants for application to nuclear reactor core design. Prog. Nucl.Energy 63, 49e56.
Sacco, W.F., Henderson, N., 2014. Differential evolutionwith topographical mutationapplied to nuclear reactor core design. Prog. Nucl. Energy 70, 140e148.
Sareni, B., Krähenbühl, L., 1998. Fitness sharing and niching methods revisited. IEEET. Evolut. Comput. 2, 97e106.
Siarry, P., Berthiau, G., Durbin, F., Haussy, J., 1997. Enhanced simulated annealing forglobally minimizing functions of many continuous variables. ACM T. Math.Software 23, 209e228.
Sinclair, M., 1993. Comparison of the performance of modern heuristics forcombinatorial optimization on real data. Comp. Oper. Res. 20, 687e695.
Storn, R., Price, K., 1997. Differential evolution e a simple and efficient heuristic forglobal optimization over continuous spaces. J. Global Optim. 11, 341e359.
Suich, J.E., Honeck, H.C., 1967. The HAMMER System Heterogeneous Analysis byMultigroup Methods of Exponentials and Reactor. Savannah River Laboratory,Aiken, South Carolina.
Thomsen, R., 2004. Multimodal optimization using crowding-based differentialevolution. In: Proceedings of the IEEE Congress on Evolutionary Computation.IEEE, Piscataway, NJ, pp. 1382e1389.
Timmer, G.T., 1984. Global Optimization e a Stochastic Approach. Ph.D. thesis.Erasmus University, Rotterdam, The Netherlands.
Törn, A., 1973. Global optimization as a combination of global and local search. In:Proceedings of Computer Simulation Versus Analytical Solutions for Businessand Economic Models, Gothenburg, Sweden, pp. 191e206.
Törn, A., 1978. A search clustering approach to global optimization. In:Dixon, L.C.W., Szegö, G.P. (Eds.), Towards Global Optimization 2. North-HollandPublishing Company, pp. 49e62.
Törn, A., �Zilinskas, A., 1989. In: Optimization, Global, Goos, G., Hartmanis, J. (Eds.),Lecture Notes in Computer Science, No. 350. Springer-Verlag, Berlin.
Törn, A., Viitanen, S., 1992. Topographical global optimization. In: Floudas, C.A.,Pardalos, P.M. (Eds.), Recent Advances in Global Optimization. Princeton Uni-versity Press, Princeton, NJ, pp. 384e398.
Törn, A., Viitanen, S., 1994. Topographical global optimization using pre-sampledpoints. J. Glob. Optim. 5, 267e276.
Törn, A., Viitanen, S., 1996. Iterative topographical global optimization. In:Floudas, C.A., Pardalos, P.M. (Eds.), State of the Art in Global Optimization.Kluwer Academic Publishers, the Netherlands, pp. 353e363.
Turinsky, P.J., 2010. Core isotopic depletion and fuel management. In: Cacuci, D.G.(Ed.), Handbook of Nuclear Engineering e Volume I (Nuclear EngineeringFundamentals). Springer ScienceþBusiness Media LLC, New York, pp. 1243e1312.
Vesterstrøm, J., Thomsen, R., 2004. A comparative study of differential evolution,particle swarm optimization, and evolutionary algorithms on numericalbenchmark problems. In: Proceedings of the 2004 IEEE Congress on Evolu-tionary Computation (CEC 2004), vol. 2IEEE, Piscataway, NJ, pp. 1980e1987.
Yang, G.Y., Dong, Z.Y., Wong, K.P., 2008. A modified differential evolution algorithmwith fitness sharing for power system planning. IEEE T. Power Syst. 23, 514e522.