Embed Size (px)
Citation preview
TOPICS IN ADVANCED ECONOMETRICS: SVAR
MODELS
PART I
LESSON 3
Luca Fanelli
University of Bologna
http://www.rimini.unibo.it/fanelli
The material in these slides is based on the following
books and papers:
— Amisano, G., Giannini, C. (1997), Topics in Struc-
tural VAR Econometrics,
Springer.
— Hamilton, J.D. (1994), Time Series Analysis, Prince-
ton University Press.
— Lutkepohl, H. (2006), New Introduction to Multiple
Time Series Analysis, Berlin: Springer-Verlag, 2006.
— Pesaran, M. H., Shin, Y. (1998), Generalized Im-
pulse Response Analysis in Linear Multivariate Mod-
els, Economic Letters 58, 17-29.
— Personal processing.
RESUMING IDENTIFICATION
Reduced forms and structural forms
Suppose we have the (stationary) VAR(p) in levels:
wt = A1 wt−1 + ...+Ap wt−p + µ + εt
t = 1, 2, ..., T
εt ∼WN(0 , Λ).
Write it as the multi-equational (dynamic) regression
model
wtM×1
= ΠM×K xt
K×1+ εt
M×1.
Multiply both sides for theM×M non-singular matrix
A:
Awt = AΠ xt + Aεt
A wt + Γ xt = ut , ut = Aεt
ut ∼WN(0 , Ω) , Ω = AΛA0
we have a structural form (SF) or, if you prefer, a si-
multaneous system of equations. Cowles Commission
case !
Multiply both sides for A−1 and we come back to theVAR
wtM×1
= ΠM×K xt
K×1+ εt
M×1.
We call this system reduced form (RF), (Statistical
model).
It can be easily recognized that
Π = −A−1Γ (A Π+ Γ = 0 )
Λ = A−1ΩA0−1 (Ω = AΛA0)
are the equations that link the parameters of the SF
and RF.
All that we know about simultaneous system of equa-
tions applies here !
Do we need a review ?
Differences:
In the RF the endogenous variables depend on lagged
values of all variables (predetermined at time t).
The number of (unrestricted) parameters is
MK +M(M + 1)/2.
In the SF, the endogenous variables may depend on
other endogenous (depending on how is specified the
A matrix) other than the predetermined.
The number of (unrestricted) parameters is
M2 +MK +M(M + 1)/2.
M2 more than the RF !
The A matrix allows to specify relatioships among en-
dogenous variables suggested by the economic theory.
The Γ matrix specifies the link among the endogenous
and predetermined. Also the covariance matrix Ω can
be opportunely constrained according to the indica-
tions of the theory (we shall turn on Ω specially when
dealing with SVARs).
Simple example.
Theory (structural form):
rLt = a12 rLt + γ11 r
Lt−1 + u1t
rSt = γ21 rLt−1 + γ21r
St−1 + u2t
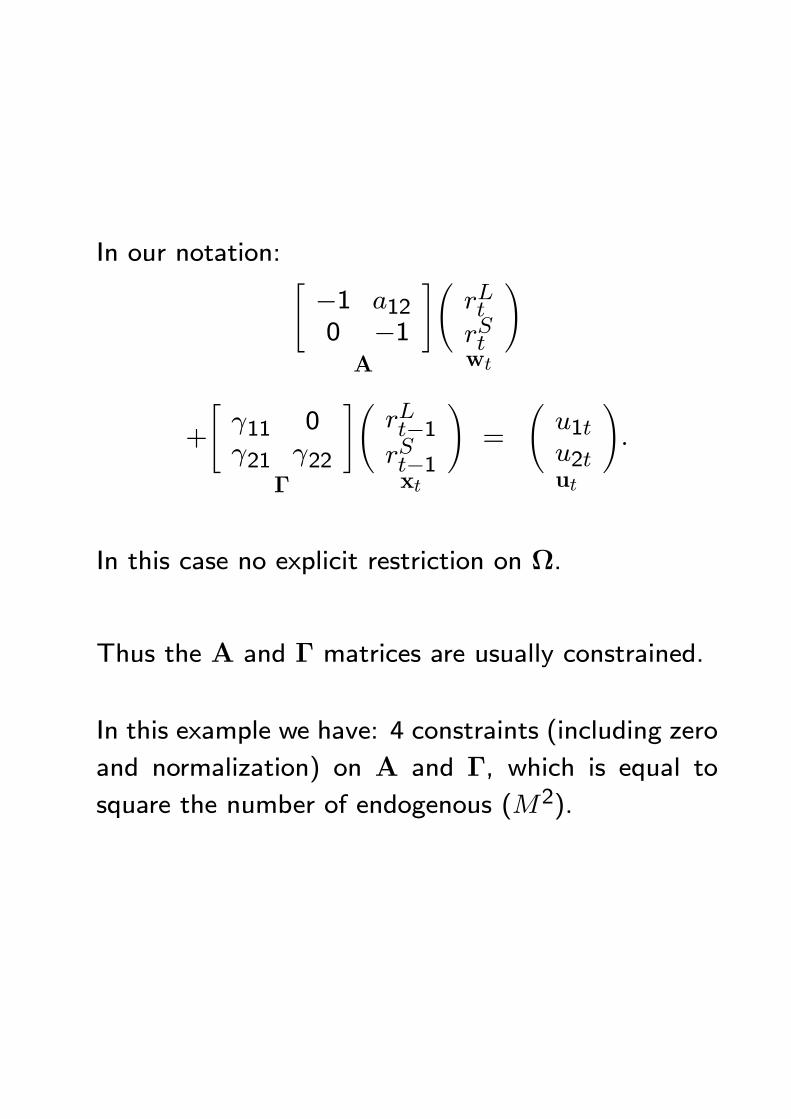
In our notation: "−1 a120 −1
#A
ÃrLtrSt
!wt
+
"γ11 0γ21 γ22
#Γ
ÃrLt−1rSt−1
!xt
=
Ãu1tu2t
!ut
.
In this case no explicit restriction on Ω.
Thus the A and Γ matrices are usually constrained.
In this example we have: 4 constraints (including zero
and normalization) on A and Γ, which is equal to
square the number of endogenous (M2).

By simple algebra the reduced form is:
rLt = π11 rLt−1 + π21 r
St−1 + ε1t
rSt = π21 rLt−1 + π22 r
St−1 + ε2t
where
π11 = (a12γ21 + γ11) , π12 = a12γ22π21 = γ21 , π22 = γ22
(Π = −A−1Γ)and
ε1t = −u1t − b12u2tε2t = u2t
εt = B−1ut
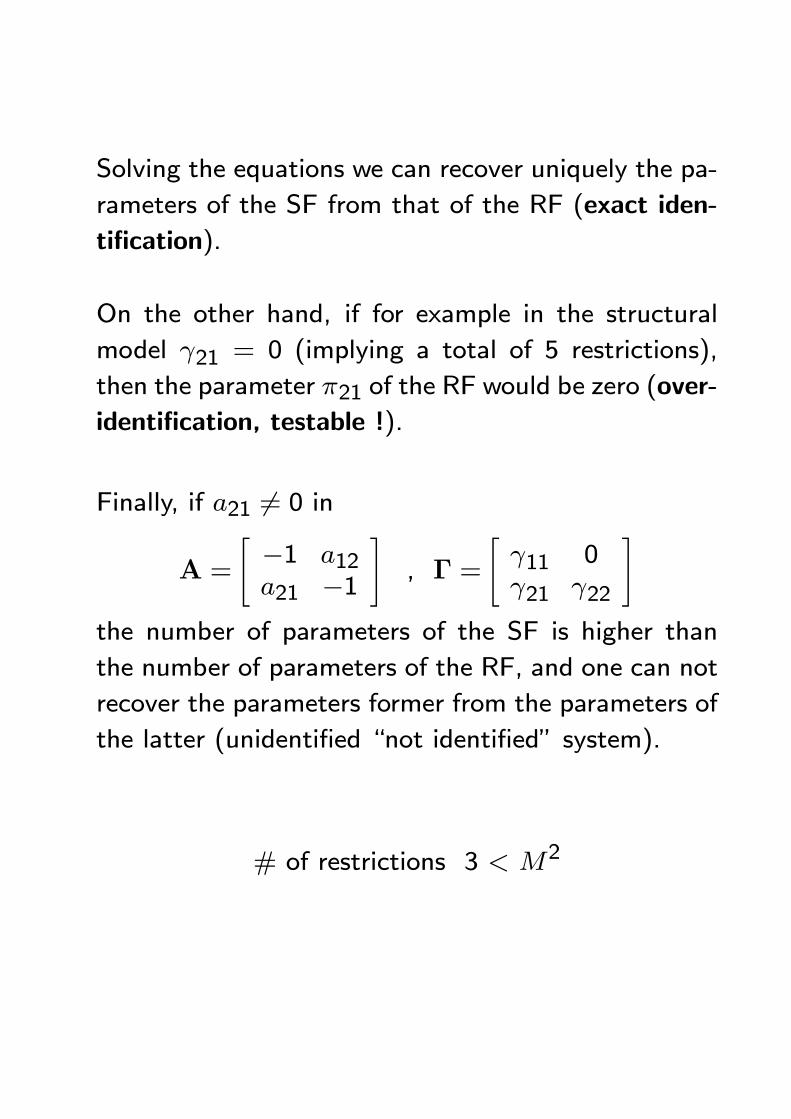
Solving the equations we can recover uniquely the pa-
rameters of the SF from that of the RF (exact iden-
tification).
On the other hand, if for example in the structural
model γ21 = 0 (implying a total of 5 restrictions),
then the parameter π21 of the RF would be zero (over-
identification, testable !).
Finally, if a21 6= 0 in
A =
"−1 a12a21 −1
#, Γ =
"γ11 0γ21 γ22
#the number of parameters of the SF is higher than
the number of parameters of the RF, and one can not
recover the parameters former from the parameters of
the latter (unidentified “not identified” system).
# of restrictions 3 < M2
Identification problem in general
In short, we known that if f(w1, w2, ..., wT ; θ) is the
likelihood function, we require a 1-1 mapping between
the elements θ ∈ Ξ, and the probability distribution
of observations.
In other words, if θ1∈ Ξ and θ2∈ Ξ we expect that
f(w1,w2, ...,wT ;θ1) 6= f(w1,w2, ...,wT ;θ2)
otherwise θ1 and θ2 would be observationally equiv-
alent. In many circumstances we are able to discuss
identification only in a neighborhood of the “true”
parameters values (local identifiability).
Recall from previous lesson that:
lnL(θ) = log f(w1, w2, ..., wT ; θ)
Hessian: H(θ) = ∂2 lnL(θ)∂θ∂θ0
Sample information matrix:
IT (θ) = E
Ã−∂
2 lnL(θ)
∂θ∂θ0
!, IT (θ0) full rank
Suppose that in our model:
εt ∼WNN(0,Λ) , ut ∼WNN(0 , Ω) , Ω = AΛA0.
The log-likelihood of the SF is then given by
lnL(A, Γ, Ω) = C+T log | det(A) | −(T/2) log(det(Ω))
−12
TXt=1
(Ayt + Γxt)0Ω−1(Ayt + Γxt)
where C is a constant.
Why ?
We known that for two given random vectors w and
u of suitable dimensions such that
wM×1 = g( u
M×1)
and g(·) invertible, it holds:fw(w) = fu(g
−1(w)) × | det[∂g−1(w)/∂w0] |where ∂g−1(w)/∂w0 is the M ×M Jacobian matrix.
Start form ut ∼WNN(0 , Ω) , hence
fη(ut , Ω) = (2π)−M/2 det(Ω)−1/2 exp
−12
TXt=1
u0tΩ−1ut
Since
wt = Πxt + A−1utit exists a linear relation between wt and ut of the
form: wt = g(ut). It is also true that ut = g−1(wt)
and that ∂ut/∂w0t = A.
Since ut = (Ayt + Γxt) , by applying the rule above:
f(wt , A, Γ Ω) = | det(A) | (2π)−M/2 det(Ω)−1/2
× exp−12
TXt=1
u0tΩ−1ut
Now consider the SF given by the parameters
(A∗, Γ∗, Ω∗), where
A∗ = A0A, Γ∗ = A0Γ, Ω∗ = A0ΩA00
and A0 is (M ×M) non-singular.
Both (A, Γ, Ω) and (A∗, Γ∗, Ω∗) belong to the spaceof parameters of the SF and it can be easily recognized
that
lnL(A,Γ,Ω) = lnL(A∗,Γ∗,Ω∗)
i.e. (A, Γ, Ω) and (A∗, Γ∗, Ω∗) are observationallyequivalent.
The identification problem does not arise in the RF.
That is the RF is identified by construction.
It is the SF which is generally not identifiable due
to the presence of simultaneous relations through the
A matrix .... unless a given number of identifying
constraints is imposed on (A, Γ, Ω) (observe that
the number of parameters of the SF is higher than
the RF).
Write the SF as
Ψ
Ãytxt
!= ut
where Ψ = [A , Γ] is M × (M +K).
Suppose that the identification restrictions on Ψ (we
ignore for the moment Ω) are b, b < (M2 +MK)
(including normalization). These can be written in
implicit form as
G0b×(M2+MK)
· vec(Ψ0)
(M2+MK)×1= r
b×1
where G is (M2 +MK)× b known, and r (b× 1) isknown.
Explicit form constraints:
vec(Ψ0) = H
a×d · ψ∗
d×1+ h
a×1
whereH is a×d, a = (M2+MK), d = (M2+MK−b) such that G0H = 0, h is (M2+MK)×1 such thatG0h = r, and ψ∗ is the d × 1 vector of unrestrictedparameters (those that must be estimated) of the SF.
With some algebra it is possible to show that the con-
dition
rankG0(IM ⊗Ψ0) =M2
is necessary and sufficient for identification (rank con-
dition). Conditions for identification can be given for
each equation separately when there are not cross-
equation identifying restrictions.
From this it follows that
b ≥M2
is only necessary for identification (order condition).
(When b > M2 the system is over-identified; over-
identification entails that the parameters of the RF are
subject to (b−M2) restrictions that must be tested).
Also a cointegrated VAR (VEqC) model can be re-
garded as the RF of a simultaneous system of equa-
tions.
For fixed vt = β0wt, r × 1, write the VEqCM as the
stationary regression model:
∆wt = [α , A∗1 , ..., A∗p−1]
vt−1
∆wt−1...
∆wt−p+1
+ εt
∆wt = ΠM×K xt + εt , K = r +M(p− 1)
Π =[α , Υ] ; xt =
Ãvt−1Ut
!
withUt = (∆w0t−1,...,∆w0t−p+1)0 and bvt−1 = bβ0wt−1.
Pre-multiply both sides by the M ×M invertible ma-
trix A:
A∆wt = AΠ xt +Aεt
and write
A∆wt + Γxt = ut
where Γ = −AΠ and ut = Aεt such that ut ∼WN(0 , Ω) , Ω = AΛA0.
There are two identification problems related to the
model above; one regards the long run relationships
embedded in β0wt = vt and the other the “stan-
dard” identification problem of simultaneous system
of equations already discussed.
Indeed, also the cointegration relations (r > 1) can
be regarded as a special case of simultaneous system
of (long run) equations.
Write
β0wt = vt
as
[A1r×G
, Γ1r×L
]
Ãytzt
!= A1yt + Γ1zt = vt
If r = G (i.e. the number of long run relationships
equals the number of variables we are actually inter-
ested in) and A1 is non-singular we can compute the
RF:
yt − Π1G×L
zt = v∗t , Π1 = −A−11 Γ1 , v
∗t = A
−11 vt
where v∗t is stationary as vt.
Thus the cointegrating relations of the system can be
written as
Ψ1
Ãytzt
!= vt
and the (linear) identifying restrictions as:
G0b×rM · vec(Ψ01)
rM×1= r
b×1where b is the total number of contraints, including
normalization.
The identification of cointegrating equations can be
discussed exactly as before.
It can be shown that a necessary and sufficient con-
dition for identification is that (rank condition)
rankG0(Ir ⊗Ψ01) = r2
whereas only necessary (order condition) is that b ≥r2.
Also in this case when identifying restrictions do not
involve cross-equation constraints identification can
be investigated separately for each of the r equations
of the system.
Johansen (1995, JoE) alternative and convenient way,
does not involve the Ψ (Ψ1) matrices, but only the
matrices G and H.
Let’s come back to SVARs now
Suppose we want to measure the impact of monetary
policy with VAR models
(Bagliano and Favero, 1998, EER)
Let wt =
Ãytzt
!
yt vector of macroeconomic (non policy) variables
(output and prices)
zt variables controlled by the monetary policymaker
(interest rates, monetary agrgegates, etc.).
Consider the SF
A
Ãytzt
!= A∗(L)
Ãyt−1zt−1
!+A
ÃεYtεZt
!
A
Ãytzt
!= Πxt−1 +A
ÃεYtεZt
!where
A
ÃεYtεZt
!= B
ÃuYtuZt
!.
The matrix A describes the contemporaneous rela-
tions among the variables
A∗(L) is a polynomial matrix of finite order (in ournotation: A(L) = IM −A∗(L))
ÃuYtuZt
!is a vector of structural disturbances (shocks)
to the non-policy and policy variables.
The non-zero off-diagonal elements of B allow some
shock to affect directly more that one endogenous
variable in the system.
The RF of this structural model is the VARÃytzt
!= A−1Πxt−1 +
ÃεYtεZt
!
A−1Π = A−1A∗(L)
where the relations between the VAR residuals and
the structural disturbances is
A
ÃεYtεZt
!= B
ÃeYteZt
!and hence
AΛ A0 = BB0
SVAR (AB-model)
Given the RF-VAR:
A(L) wt = εt , εt ∼WN(0,Λ)
Consider A and B two M × M invertible matrices
such that
AA(L) wt = AεtAεt = But
E(ut) = 0 , E(utu0t) = IM
AΛA0 = BB0
In this kind of structural model (the most general) it
is possible to model explicitly the instantaneous links
among the endogenous variables (through the A ma-
trix), and the effect of the orthonormal shocks on the
equations of the system (through the B matrix).
The relation Aεt = But makes a formal differencewith traditional structural models where structural dis-
turbances are not necessary required to be orthonor-
mal.
In this SVAR:
E(Aεtε0tA0) = AΛA0 = E(Bete
0tB0) = BB0
which entails M(M +1)/2 a “natural” set of restric-
tions on A and B stemming from the symmetry of
the RF-VAR covariance matrix Λ.
Apart from deterministic components (constant, dum-
mies, etc.) the number of parameters is:
RF-VAR : M2p
AB-SVAR : 2M2 +M2p
AΛA0 = BB0 provides M(M+1)/2 natural restrictions
Thus, there are still 2M2−M(M+1)/2 additional pa-
rameters in the SVAR. Necessary condition to achieve
the local identifiability of the SVAR is that
b ≥ 2M2 −M(M + 1)/2
b = bA + bB
bA # restrictions on A
bB # restrictions on B
The identification of the SVAR is achieved by impos-
ing a proper set of bA+ bB identifying restrictions on
A and B.
Necessary condition:bA + bB ≥ 2M2 −M(M + 1)/2
Sufficient condition: → Check the non-singularity of
information matrix !
Local identifiability (i.e. in a neighborhood of the
“true” value).
SVAR (K-model)
It is obtained from the AB-SVAR setting B = IM :
Consider A M ×M invertible
AA(L) wt = Aεt
Aεt = ut
E(ut) = 0 , E(utu0t) = IM
AΛA0 = IM (Λ = A−1(A0)−1)
M2 +M2p number of parameters.
SVAR (C-model)
It is obtained from the AB-SVAR setting A = IM :
A(L) wt = εt
εt = But
E(ut) = 0 , E(utu0t) = IM
Λ = BB0
M2 +M2p number of parameters.
The SVAR based on Cholesky is a special case of the
C-model:
B = P , P Cholesky factor of Λ
In this case, P embodies, by contruction, 12M(M −1) restrictions (the zeros in the upper off diagonal
terms); therefore the total number of constraints on
the parameters of this model is
1
2M(M + 1) → implied by Λ = PP0
1
2M(M − 1) → implied by triangular struc. of P
total number of restrictions: M2 exact identification
(from a consistent estimate of Λ we get a unique
consistent estimate of P).
Difference with simultaneous system a la Cowles Com-
mission
Observe that contrarily to what happens in standard
simultaneous systems of equations, identification does
not involve predetermined variables, i.e. the elements
associated with lagged values ofwt, those in Γ = −AΠin the model
Awt + Γxt = ut
but only contemporaneous relationships among en-
dogenous and shocks through the A and B matrices.
In the SVAR identification is achived by restricting
A and B only; lagged dynamics unrestricted. The
restrictions on A and B supplement the ”natural”
set of restrictions provided by the relation AΛA0 =BB0.
Example.
Blanchard, O. J. and Quah, D. (1989), The dynamic
effects of aggregate demand and supply disturbances,
American Economic Review 79, 655-673.
wt =
Ã∆ytunt
!growth rate of GDPunemployment rate
(stationary
model)
SVAR of the form (C-model)Ã∆ytunt
!= C(L)εt , εt = But , ut ∼WN(0 , IM)
Interpretation of ut:
ut =
Ãu1tu2t
!demand shocksupply shock
The VMA represenation of the SVAR isÃ∆ytunt
!= C(L)But = Φ(L)ut =
∞Xj=0
Φjut−j
where
Φ(L) = C(L)B =
"φ11(L) φ12(L)φ21(L) φ22(L)
#.
"b11 b12b21 b22
#
Recall that C(1) =P∞j=0Cj is the long run (cumu-
lated) multiplier, hence Φ(1) = C(1)B =P∞j=0CjB
is a long run structural multiplier as well.
Hypothesis: the demand shock has no long run (per-
manent) effect on output (“long run neutrality”). This
constraint can be formalized as
c11(1)b11 + c12(1)b12 = 0
and implies that
Φ(1) =
"0 φ12(1)
φ21(1) φ22(1)
#.
Ãu1tu2t
!demand shocksupply shock
In the specified SVAR the relationship
BB0 = Λ
imposeM(M+1)/2 = 3 restrictions on B, and leaves
one element free, ideed:
b211 + b212 = σ11 , b11b21 + b12b22 = σ12
b221 + b222 = σ22.
Including the “long run neutrality” constraint and con-
sidering usual order conditions (intutitvely), the SVAR
appears just (exact) identified (necessary condition
!!).
c11(1)b11 + c12(1)b12 = 0
b211 + b212 = σ11
b11b21 + b12b22 = σ12
b221 + b222 = σ22
In other words, given the estimate of the parameters
of the RF-VAR (and hence of C(L) and Λ) it seems
that in principle it is possible to recover all elements
of the B matrix.
Example.
Blomberg S.B. Hess, G.D. and Orphanides, A. (2004),
The macroeconomic consequences of terrorism, Jour-
nal of Monetary Economics 51.
OBJECT: Empirical investigation of the macroeco-
nomic consequences of international terrorism and in-
teractions with alternative forms of collective violence.
For a given country:
wt =
real GDP per capita
terrorismexternal conflictinternal conflict
YtTtEtIt
Data: annual frequency
They consider the VAR(2):
wt = A1wt−1 +A2wt + µ+ εt
where reduced form residuals are
εt =
εY tεTtεEtεIt
Specification: a SVAR of the form (example of a C-
model)
wt = A1wt−1 +A2wt + µ+ εt
εt = Bet
E(et) = 0 , E(ete0t) = IM , Λ = BB0
where
ut =
uY tuTtuEtuIt
output shockterrorism shock
external conflict shockinternal conflict shock
“Based on economic intuition, broad historial evidence
(and other evidence presented in the paper), conflict
can clearly have an effect on economic activity within
period (first equation); internal conflict is a driving
force for other types of conflict (second and third
equation); internal conflict is the most exogenous vari-
ables in the system that depends only on itself within
period.”
Formally:
εY t = b1 uY t + b2 uTt + b3 uEt + b4 uIt
εTt = b5 uTt + b6 uIt
εEt = b7 uEt + b8 uIt,
εIt = b9 uIt
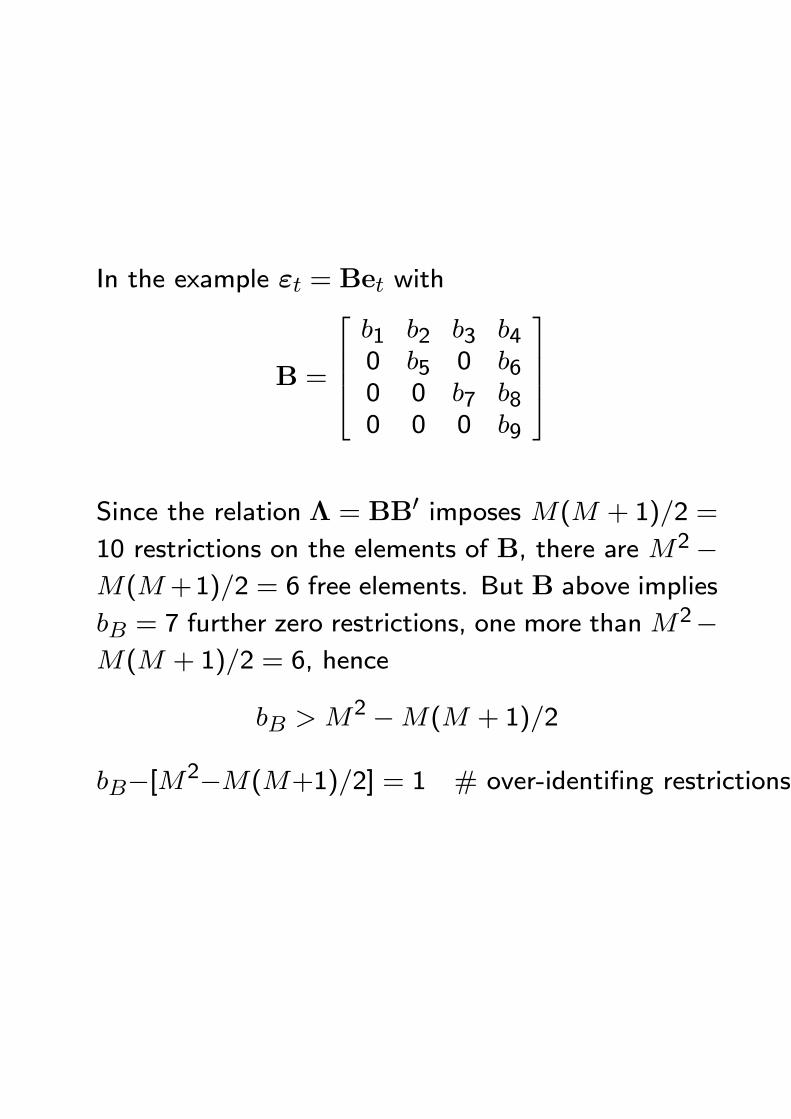
In the example εt = Bet with
B =
b1 b2 b3 b40 b5 0 b60 0 b7 b80 0 0 b9
Since the relation Λ = BB0 imposes M(M + 1)/2 =
10 restrictions on the elements of B, there are M2−M(M+1)/2 = 6 free elements. But B above implies
bB = 7 further zero restrictions, one more thanM2−
M(M + 1)/2 = 6, hence
bB > M2 −M(M + 1)/2
bB−[M2−M(M+1)/2] = 1 # over-identifing restrictions
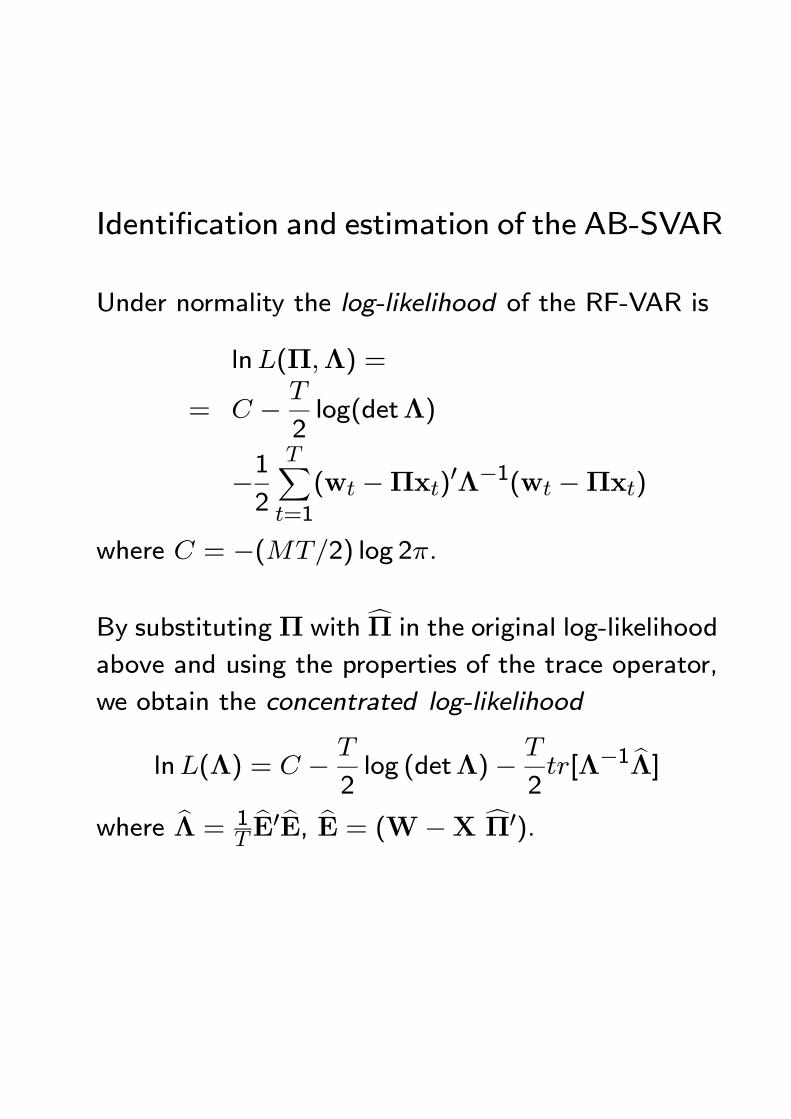
Identification and estimation of the AB-SVAR
Under normality the log-likelihood of the RF-VAR is
lnL(Π,Λ) =
= C − T
2log(detΛ)
−12
TXt=1
(wt −Πxt)0Λ−1(wt −Πxt)
where C = −(MT/2) log 2π.
By substitutingΠ with cΠ in the original log-likelihood
above and using the properties of the trace operator,
we obtain the concentrated log-likelihood
lnL(Λ) = C − T
2log (detΛ)− T
2tr[Λ−1 bΛ]
where bΛ = 1TbE0 bE, bE = (W−X cΠ0).
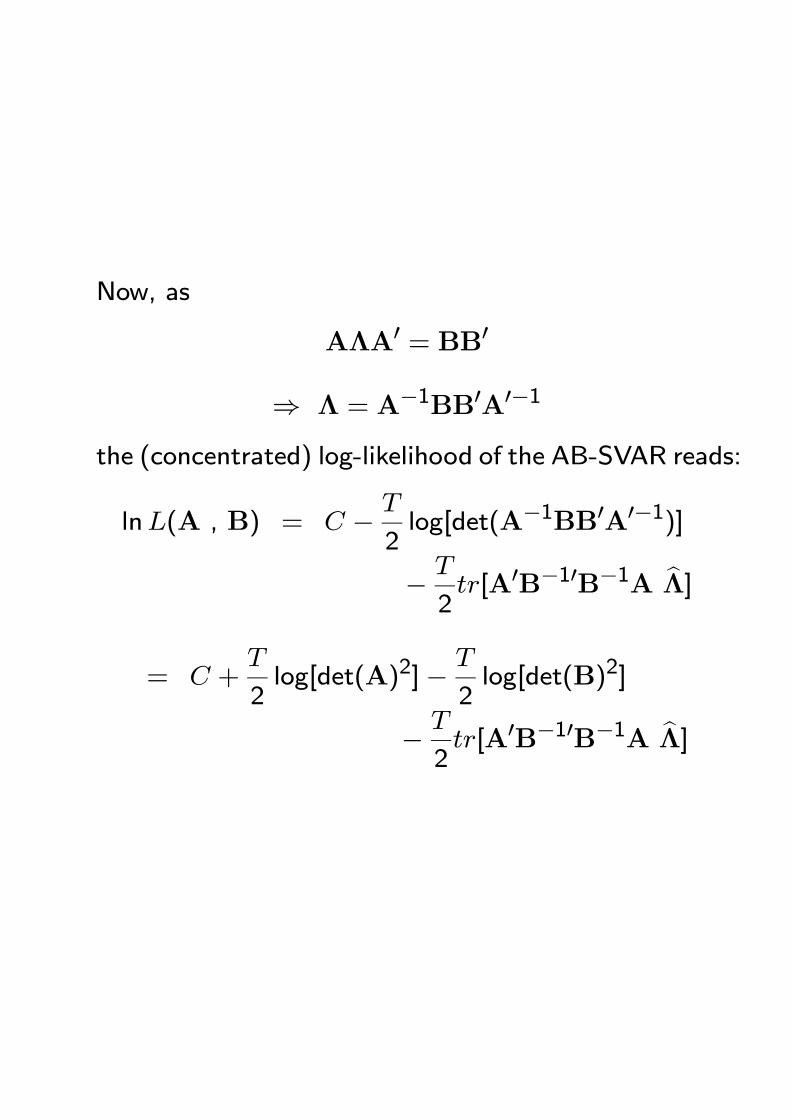
Now, as
AΛA0 = BB0
⇒ Λ = A−1BB0A0−1
the (concentrated) log-likelihood of the AB-SVAR reads:
lnL(A , B) = C − T
2log[det(A−1BB0A0−1)]
− T
2tr[A0B−10B−1A bΛ]
= C +T
2log[det(A)2]− T
2log[det(B)2]
− T
2tr[A0B−10B−1A bΛ]
The identifying restrictions onA andB can be written
in implicit form as
GAbA×M2
vec(A)M2×1
= dAbA×1
GBbB×M2
vec(B)M2×1
= dBbB×1
i.e. more compactly,"GA 00 GB
#Ãvec(A)vec(B)
!=
ÃdAdB
!
In explicit form the restrictions can be written asÃvec(A)vec(B)
!=
"SA 00 SB
#ÃγAγB
!+
ÃsAsB
!where γA and γB are the vectors containing the “free”
elements (i.e. those to be estimated) of A and B and
the matrices and vectors S and s are such that
G0ASA = 0 , G0AsA = dAG0BSB = 0 , G0BsB = dB
.
SB M2 × (M2 − bA) , γb is (M2 − bA)× 1SB M2 × (M2 − bB) , γB (M2 − bB)× 1
The Full Information maximum Likelihood (F.I.M.L)
estimation of the AB-SVAR is obtained by maximizing
the log-likelihood
lnL(A , B) =
= C +T
2log[det(A)2]− T
2log[det(B)2]
− T
2tr[A0B−10B−1A bΛ]
s.t.
Ãvec(A)vec(B)
!=
"SA 00 SB
#ÃγAγB
!+
ÃsAsB
!
The constrained numerical maximization of the likeli-
hood
lnL(A,B)constraints ≡ lnL(γA,γB)is based on the assumption that
IT
ÃγAγB
!non-singular at true values
Necessay and sufficient conditions can be obtained
only for local identification, following the theorems
in Rothemberg (1971, Ecta).
We refer to Amisano and Giannini (1997) for a de-
tailed discussion of condition for identification and
FIML estimation of SVAR parameters.
As a rule, however, the Hessian and the sample In-
formation matrices are functions of the parameters
to be estimated, so they cannot be computed be-
fore estimation is carried out, rendering this type of
check non-operational → compute IT (·) at randompoints in the parameter space, Amisano and Giannini
(1997).
Lucchetti (2006, ET) has provided new conditions
(necessary and sufficient) for identification of SVARs
that do not involve γA and γB → algebra involved.
Once we optimize the log-likelihod function and check
that the system is identifiableÃvec(cA)vec( bB)
!FIML
=
"SA 00 SB
#Ã bγAbγB!FIML
+
ÃsAsB
!
bΛC =cA−1 bB bB0cA0−1
with lnL(γA,γB) = lnL(bΛC)
LR = −2[lnL( bΛC)−lnL( bΛU)]d−→
T→∞ χ2(b−M(M+1)/2).
LR test for the (possible) over-identifying restrictions.
We also know
T 1/2"Ã bγAbγB
!−ÃγAγB
!#d−→
T→∞ N
"0 , I−1∞
ÃγAγB
!#
I∞ÃγAγB
!= lim
T→∞1
TIT
ÃγAγB
!which in turn implies
T 1/2"Ã
vec(cA)vec( bB)
!−Ãvec(A)vec(B)
!#d−→
T→∞ N [0 , ΣAB]
ΣAB =
"SA 00 SB
#I−1∞
ÃγAγB
!"S0A 00 S0B
#
bΣAB =
"SA 00 SB
#I−1∞
à bγAbγB!"
S0A 00 S0B
#
IRFs from the AB-SVAR
Write the (stationary) AB-SVAR as
AA(L)wt = But
and invert first A and then A(L), obtaining
wt = C(L)A−1But
wt = Φ(L)ut , Φ(L) = C(L)A−1B
More precisely, the “structural” VMA representaion is
given by
wt = Φ(L)ut =∞Xj=0
Φjut−j
where
Φ(L) = Φ0+ Φ1L+Φ2L2 + ....
= C(L)A−1B = (IM +C1L+C2L2 + ...) A−1B
so that
Φ0 = A−1B , Φh = ChA
−1B , h = 1, 2, ....
When we have discussed the companion form of the
VAR we have seen that given the companion matrix
JMp×Mp
=
A1 A2 · · · Ap−1 Ap
IM 0 · · · 0 00 IM
. . . ... ...... ... . . . 0 00 0 · · · IM 0
the relation with the parameters of the VMA repre-
sentation is given by
Ci = R0Ji R , i = 1, 2, ....
Then
Φ0 = A−1B , Φh = R
0Jh R Φ0 , h = 1, 2, ....
so that
bΦ0 = cA−1 bB , bΦj = R0bJhR bΦ0 , h = 1, 2, ....
Since cA , bB and cΠ (bJ) are consistent with Gaussianasymptotic distribution,
the bΦh, h = 0, 1, 2, .... will be consistent and asymp-
totically Gaussian as well.
It is possible to compute asymptotic confidence inter-
vals for impulse response functions.
Define the vector of structuralized impulses up to the
horizon n
φn = vec([Φ1 , Φ2 , ..., Φn]) , M2n× 1and
φ0 = vec(Φ0) , M2 × 1
φ0n = vec([Φ0, Φ1 , Φ2 , ..., Φn]) full M2(n+1)×1 vec
First, recall that
bΦ0 = cA−1 bBso that the asymptotic distribution of bφ0 will dependupon the joint distribution of vec(cA) and vec( bB) :tedious but feasible with a bit of patience, and using
matrix derivative rules.
It can be proved (Amisano, Giannini, 1997) that
T 1/2 (bφ0 − φ0)d−→
T→∞ N [0 , Σ(0)]
where Σ(0) depends on ΣAB, A and B, and can
be estimated consistently by replacing A and B in
the expression for Σ(0) with their consistent estimatesbΣAB,cA and bB.
Likewise:
T 1/2 (bφn − φn)d−→
T→∞ N [0 , Σ(n)]
where the ij-th block of Σ(n) (which isM2n×M2n),
Σ(n)ij, is M2×M2 and depends opportunely on the
elements of the companion matrix J and Φ0, and can
be estimated opportunely by replacing J andΦ0 in the
expression for Σ(n)ij with their consistent estimatesbJ and bΦ0.Observe that the Σ(n)ii block of Σ(n), i = 1, 2, ..., n
corresponds to the variance covariance matrix of vec(Φi).
Knowledge of bφ0n = vec([ bΦ0 , bΦ1 , bΦ2 , ..., bΦn])
(vector of structuralized impulse responses) and the
associated joint (estimated) covariance matrix allows
to calculate asymptotic confidence intervals for im-
pulse responses.