Embed Size (px)
Citation preview

Time-Varying Observers for Launched
Unmanned Aerial Vehicle ⋆
A. Koehl ∗,∗∗ H. Rafaralahy ∗ M. Boutayeb ∗ B. Martinez ∗∗
∗ CRAN - CNRS UMR 7039, Nancy-Universite, 186 rue de Lorraine,54400 Cosnes et Romain, Fance (e-mail: [email protected])
∗∗ Institut Franco-Allemand de Recherches de Saint-Louis, 5 rue duGeneral Cassagnou, 68300, Saint-Louis, France
Abstract: In this contribution we investigate the problem of linear velocity estimation of aGun Launched Micro Air Vehicle (GLMAV), which is a new Micro Air Vehicle (MAV) concept,intended for outdoor flight, and using two-bladed coaxial contra-rotating rotors. The linearvelocity estimation is realized using a simple time-varying Luenberger-like observer, and onlyusing partial measurmements of an Inertial Management Unit (IMU). Simple conditions of theobservation-error-asymptotic-stability are given in terms of physical variables of the GLMAV.The reduced-order observer stability analysis is realized through the Lyapunov approach andthe Barbalat’s lemma. Simulations results show the effectiveness of the estimation techniqueapplied to the presented GLMAV model, identified from experimental results.
Keywords: speed estimation, Unmanned Aerial Vehicle, time-varying observer, stateestimation, stability analysis, aerospace engineering, identification algorithms, Kalman filters.
1. INTRODUCTION
Research and developments related to Unmanned MicroAir Vehicles (UMAVs) have been the subject of growinginterest over the last few years, motivated by the recenttechnological advances in the fields of actuator minia-turization and embedded electronics. Thus the design ofefficient and low-cost UMAV systems with autonomousnavigation capacity has become possible, providing newtools for both civilian and military applications over thenext years. The UMAV main objective will be to deportthe human vision beyond the natural horizon, in order toaccomplish risky missions in the place of humans and inconfined environments. Therefore, the new required capa-bilities will be to combine the hover flight to investigate aspecific item in cluttered spaces with the agressive flightat high speeds and accelerations to reach remote areas, forboth indoor and outdoor flights.The rotary-wing UMAV is presently a fully potential andpromising solution to this dual requirement among thevast existing mechanical configurations described in theliterature (Lozano (2010); Castillo et al. (2005); Cerroet al. (2004); Ganguli (2004); Valvanis (2007)) amidst thefamilies of single-rotor, twin-rotor, quad-rotor or hybrid-rotorcraft configurations. The coaxial contra-rotating ro-tor architecture was chosen here because it best fulfils theneeds of the Gun Launched Micro Air Vehicle (GLMAV)project. Previous studies (Gnemmi et al. (2009); Wereleyand Pines (2001); Smith et al. (2003)) have demonstratedthe GLMAV concept feasibility based on theoretical andexperimental investigations.Since the GLMAV must be as light as possible for low
⋆ This work is supported by the french public administrative estab-lishment National Research Agency under the number ANR 09
SECU 12.
Fig. 1. GLMAV Concept.
cost and low energy consumption, it becomes natural touse a state estimator to deduce all the necessary variables.Observers are usually used to estimate the non measuredstate for feedback control purpose, or to generate residualsignals for fault diagnosis.In this paper, we propose to estimate the complete trans-lational velocity of the GLMAV only from partial velocitymasuremements given by the Inertial Management Unit(IMU). The main reason is to keep an accurate estimationof the linear velocity, even if some sensors failed in theIMU. Furthermore, the GLMAV linear displacement veloc-ity is a vital information to quantify the wind-disturbancevelocities to which the GLMAV is subjected. Since theGLMAV is mainly dedicated to the outdoor flight, itwill be subject to wind-disturbance in autonomous flightmode, and will be very sensitive to this disturbance. Somepromising results about the wind-disturbance estimation
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
Copyright by theInternational Federation of Automatic Control (IFAC)
14380

T1
T2
O1
O2
Vprop
d −δcy
+δcy
−δcx+δcx xryr
G
ψ ψ
φ θ
D
yb xb
zbxeye
ze
OVtot
N > 0
M > 0 L > 0
l
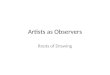
Fig. 2. GLMAV with articulated rotor by cyclic swash-plate.
problem are presented in (Koehl et al. (2010)) using anExtended Kalman Filter-like observer with a Sliding Win-dow.In the following, we estimate the GLMAV body velocitydisplacement only using a simple time-varying Luenberger-like observer and the GLMAV model. The simple timevarying-observer is effective and needs less computationalrequirements compared with nonlinear observer (Benzem-rane et al. (2007)). The GLMAV model has good predic-tion capabilities, as it is built from theoretical and ex-perimental results and validated for hover and near-hoverflight conditions. The Luenberger-like observer is designed,the asymptotic stability of the estimation error is provedusing Barbalat’s Lemma and the existence conditions ofthe observer are given. Unlike Boutayeb et al. (2008)who has already used a time-varying observer for speedestimation, in our case the measured output is not thestate derivative, considering our UAV model. The speedestimation results are presented in this paper by means ofnumerical simulations.
2. GLMAV MODELING
In this Section we present the GLMAV mathematicalmodel built from the mechanical and aeromechanical phys-ical laws. The GLMAVmechanical architecture is based ontwo-bladed coaxial contra-rotating rotors, Figure (2).The GLMAV mathematical model can be divided intotwo submodels, i.e. a rigid body with 6 Degrees of Free-dom (DoF), supplemented by forces from the aerodynamicmodel, generated by the rotor rotational speeds and theswash-plate incidence angles.
2.1 6-DoF Model
Considering the GLMAV to be a rigid body with a fixedmass m, the following generic 6-DoF Equations refer toits motion in the three-dimensional space. It describesthe rotational and translational dynamics and kinematicsusing Newton’s second law, the six aerodynamic loadsX,Y,Z,L,M,N, and the motion-derived Equations de-
scribed relative to the body-fixed reference frame. Thus,the translational kinematics is written as:
(
xyz
)
= Eφ,θ,ψ
(
uvw
)
, (1)
where x, y, z are the three gravity center position variablesexpressed in the earth coordinate system, Eφ,θ,ψ is therotation matrix between Earth and body coordinate sys-tems O,xe,ye, ze,G,xb,yb, zb depending on the EulerAngles φ, θ, ψ, and the three gravity center translationalvelocities u, v, w expressed in the body coordinate system.The rotational kinematics depends on the Euler angles andthe three angular velocity variables p, q, r such that:
φ
θ
ψ
=
1 tan θ sinφ tan θ cosφ0 cosφ − sinφ
0sinφ
cos θ
cosφ
cos θ
(
pqr
)
. (2)
The translational dynamic Equation is written as:
m
(
uvw
)
=
(
XYZ
)
−m
(
0 −r qr 0 −p−q p 0
)(
uvw
)
. (3)
Finally, the rotational dynamic Equation is expressed as:
I
(
pqr
)
=
(
LMN
)
−
(
0 −r qr 0 −p−q p 0
)
I
(
pqr
)
, (4)
where the GLMAV inertial matrix I is approximated bydiag[Ixx, Iyy, Izz] as the GLMAV is axisymmetric alongzb, implying that the non-diagonal elements of I could beapproximated by zero. Furthermore, for the same reasonas previously: Ixx ∼= Iyy.
2.2 Aerodynamic Modeling
In the following, the presented aerodynamic model isdivided into the forces induced by the body immersed inthe airflow and the loads generated by the coaxial rotorsand the cyclic swash-plate incidence angles.
Forces generated by the coaxial rotor The thrust is themain force generated by both rotors allowing the GLMAVto control its rate of climb. The total force T generated bythe coaxial rotor is written as:
T =
−β sin δcy cos δcxΩ22
−β sin δcxΩ22
σαΩ21 + σβ cos δcx cos δcyΩ
22
. (5)
where zb and yb are base vectors, δcx and δcy are theswash-plate incidence angles, Ω1 and Ω2 are the upper andlower rotor-rotation speeds respectively, α and β are therotors aerodynamic coefficients, and σ is an aerodynamicloss coefficient with 0.8 / σ / 1.
Total wind velocity In order to determine the aerody-namic forces acting on the body, it is necessary to knowboth the direction and velocity of the total airflow in-side which the GLMAV operates. In all, three main windsources composing the total wind vector Vtot can be iden-tified: the first component corresponds to the airflow speedVprop generated by the coaxial rotors; the second compo-
nent is Vbody = [u v w]⊤
due to the airflow generated bythe translational and rotational body displacements, andfinally, a third component Vwind is due to the externally
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
14381

induced wind, in general unpredictable. The total windvector in the body coordinate system is then written as:
Vtot = Vprop −Vbody +Vwind. (6)
Forces acting on the body Given that the expression ofVtot is known, the forces acting on the GLMAV bodycould be defined supposing that the body (i.e. the shellof the GLMAV) is composed of two elementary volumes:a cylinder and a half-sphere. The three force componentsof the body force fbody depend on the air density ρ, thebody length l and diameter D, the cylinder surface Sc, thehalf-sphere surface Ss, the aerodynamic coefficients Cx, Cyand Cz, and the total wind velocity Vtot;
[fbody]xb=
1
2mρlDScCx‖Vtot‖
2
xb,
[fbody]yb=
1
2mρlDScCy‖Vtot‖
2
yb,
[fbody]zb=
1
2mρπD2
4SsCz‖Vtot‖
2
zb,
(7)
with
‖Vtot‖2= Vtot
√
[Vtot]2xb+ [Vtot]2yb
+ [Vtot]2zb. (8)
The weight-force component fp acting on the GLMAV iswritten as:
fp = mg
(
− sin θcos θ sinφcos θ cosφ
)
. (9)
Moments induced by both rotors The pitch, roll and yawmoments, respectively M,L and N are induced by theincidence angles of the lower rotor and are written asfollows:
L = −dβ sin δcxΩ22 ,
M = dβ sin δcy cos δcxΩ22 ,
N = γ1Ω21 + γ2Ω
22 ,
(10)
where d is the distance between the points G and O2, andγ1, γ2 are the yaw aerodynamic coefficients.
3. MODEL IDENTIFICATION
From this point onward, the purpose consists of determin-ing of the aerodynamic parameter values α, β, Cz, γ1 andγ2, by using the GLMAV model described in section (2)as well as the measured input-output data collected fromexperiments.
3.1 Experimental Design
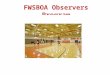
The experimental purpose was to measure the loads ac-cording to the rotor-rotation speeds and to the cyclicswash-plate incidence angles defined as input data. The sixload components were measured using a strain-gage aero-dynamic balance illustrated in figure (3). The GLMAV wasrigidly fixed to the aerodynamic balance which was alsofastened to a supporting base. The GLMAV mechanicaldesign was inspired by the ready-to-fly model kit and wasmade from both purchased and ISL-designed components.
3.2 Validation Results
Given that the aerodynamic model input-output data areknown from experiments, the aerodynamic parameters α,
(a) (b)
Fig. 3. (a) GLMAV prototype - (b) Aerodynamic balance.
β, Cz, γ1 and γ2 can be estimated using the aerodynamicmodel built in section (2). After estimating the aerody-namic parameter values by means of the Extended KalmanFilter (EKF) recursive method, the model validation con-sists of comparing the identified model outputs with othersets of input-output measured data such as those usedin the estimation step. In figure (4), the dashed linesrepresent the model outputs and the solid lines indicatethe measured loads.According to the experimental results (figure (4)), theaerodynamic model is well validated in hover conditionswithout wind disturbances, as the measured data well fitthe model outputs. The validation results are less satisfy-ing on the xb and yb axes relative to the zb axis in partdue to the coupling between the lateral load sensors.In this section we have developed a comprehensive
20 40 60 80 100 120 140
−20
0
20
40
60
20 40 60 80 100 120 140
−40
−20
0
20
20 40 60 80 100 120 140
150
200
250
Samples
X,[g]
Y,[g]
Z,[g]
Fig. 4. Model output validation - Comparison betweenthe measured forces X,Y, Z and the estimated forcesX, Y , Z.
and identified aerodynamic model of the GLMAV. ThisGLMAV modelling is a solid work base for the develop-ment of the linear velocity observer in the next sections(4)-(6), and for the estimation tests realized through nu-merical simulations in section (7).
4. PROBLEM STATEMENT
The state variables of the GLMAV are the Euler Angles(φ, θ, ψ), the position of the gravity center (x, y, z) ex-pressed in the Earth coordinate system, the angular ve-
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
14382

locities (p, q, r) and the translational velocity (u, v, w) ex-pressed in the body coordinate system. Since the GLMAVis equipped with an IMU, it is assumed that the measuredvariables are (φ, θ, ψ), (p, q, r) and (x, y, z). The aim of thissection is the synthesis of a simple time-varying observer ofthe GLMAV velocity (u, v, w) from partial measurementsonly, wich are not the state derivative unlike Boutayebet al. (2008). Hence, we consider a reduced linear time-varying GLMAV model for the velocity observation prob-lem, which corresponds only to equations (1) and (3) fromSection (2), such that:
x(t) = A(t)x(t) + Γ(t)y(t) = CiE(t)x(t)
(11)
where Γ(t) corresponds to the sum of the aerodynamicforce components described in Section (2.2) divided by theGLMAV mass (X/m,Y/m,Z/m), that is the accelerationmeasured by the IMU. The developped expression of thesystem (11) is :
[
uvw
]
=
[
0 r −q−r 0 pq −p 0
][
uvw
]
+
[
Γ1(t)Γ2(t)Γ3(t)
]
Ci
[
xyz
]
= CiE(t)
[
uvw
] (12)
where
E(t) =
[
cθcψ sφsθcψ − cφsψ cφsθcψ + sφsψcθsψ sφsθsψ + cφcψ cφsθsψ − sφcψ−sθ sφcθ cφcθ
]
(13)
with cα = cosα, sα = sinα and
C1 =
[
1 0 00 1 0
]
, C2 =
[
0 1 00 0 1
]
, C3 =
[
1 0 00 0 1
]
. (14)
Assumption 1. The Euler angles are small in the hoverflight, near hover flight and cruise flight cases, that is thatthey are bounded between realistic values of −0.18rad and+0.18rad. Therefore, we consider that sα ≈ α and cα ≈ 1.
To simplify the observer gain synthesis and the asymptoticconvergence of the observation error from a Luenberger-like observer form in the next Section, the equation (13)is simplified from assumption (1) as:
E(t) =
[
1 φθ − ψ θ + φψψ φθψ + 1 θψ − φ−θ φ 1
]
. (15)
5. OBSERVER DESIGN
The proposed Luenberger-like time-varying observer hasthe following form:
˙x(t) = N(t)x(t) +M(t)Γ(t) +K(t)y(t) (16)
where x(t) is the state estimation and K(t) is the observergain.
Assumption 2. φ, θ, ψ and φ, θ, ψ and φ, θ, ψ are all bounded.Therefore E(t), E(t) and E(t) are also bounded.
Assumption 3. ψ2 6= −1 when i = 1 ∀ t ≥ 0,φ2 6= −1 when i = 2 ∀ t ≥ 0,φ2 6= −1 and θ2 6= −1 when i = 3 ∀ t ≥ 0.
Remark 1. As φ ∈ R, θ ∈ R and ψ ∈ R, the relationsφ2 6= −1, θ2 6= −1 and ψ2 6= −1 are always true.
Assumption 4. rank [Ω(t)] = 3 is true ∀ Ci for i =1, ..., 3 and ∀ t ≥ 0 with
Ω(t) =
(
CiE(t)
CiE(t)
)
(17)
Lemma 1. Assume that assumptions (2), (3) and (4) hold,then the system (16) is an asymptotic observer for thesystem (11) if the observer matrices are chosen as:
M(t) = I
K(t) = L(t) + γE(t)⊤C⊤
i
L(t) = A(t)Q+
N(t) = A(t)−K(t)CiE(t)
(18)
where γ is a strictly positive tuning parameter of theobserver convergence speed.
We set e(t) = x(t)− ˙x(t), then the developped expressionof the error dynamics becomes:
e(t) = [A(t)−N(t)−K(t)CiE(t)]x(t)+ [I−M(t)]Γ(t) +N(t)e(t).
(19)
From equation (19), the unbiasedness conditions are:
A(t)−N(t)−K(t)CiE(t) = 0I−M(t) = 0
(20)
and it follows:
N(t) = A(t)−K(t)CiE(t)M(t) = I
. (21)
Knowing the unbiased conditions, the equation (19) re-duces to the homogeneous equation of the time-relativeerror-derivative, such that:
e(t) = N(t)e(t) (22)
From this point on, we choose the gain K(t) such that:
K(t) = L(t) + γE(t)⊤C⊤
i (23)
By computing equations (21) and (23), the expression ofN(t) becomes:
N(t) = A(t)− L(t)CiE(t)− γE(t)⊤C⊤
i CiE(t). (24)
Finally, by computing equations (22) and (24), the obser-vation error dynamics becomes:
e(t) = −γE(t)⊤C⊤
i CiE(t)e(t) (25)
if we choose the gain L(t) such that:
A(t)− L(t)CiE(t) = 0 ⇔ A(t) = L(t)CiE(t). (26)
Let
Q = CiE(t). (27)
Then using assumption (3), it is easy to see thatrank [Q(t)] = 2 ∀ t ≥ 0. It follows that the generalizedinverse of Q(t) exists and the best approximation of L(t)to solve equation (26) is:
L(t) = A(t)Q+ (28)
where Q+ is the Moore-Penrose inverse of Q (Lancasterand Tismenetsky (1985)) such that:
Q+ = Q⊤[
QQ⊤]−1
. (29)
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
14383

6. STABILITY AND OBSERVABILITY ANALYSIS
In this section, we prove that the observation error asymp-totically converges to zero. We give the existence condi-tions of our observer and we give the observability con-ditions of our system (11). We also first consider thefollowing Lyapunov function candidate:
V(t) = e(t)⊤e(t) (30)
The time derivatives of V(t) along (30) leads to:
V(t) = −2γ‖CiE(t)e(t)‖2 ≤ 0. (31)
Since V(t) defined on [0,+∞[ is monotically non increas-ing, then V(t) is bounded and converges asymptotically toa limit value l such that:
V(t) → l as t→ +∞. (32)
Furthermore, as E(t) 6≡ 0, then e(t) is also bounded.
The time derivative of V(t) along (16) gives:
V(t) = 4γe(t)⊤E(t)⊤C⊤
i CiE(t)E(t)⊤C⊤
i CiE(t)e(t) (33)
− 4γe(t)⊤E(t)⊤C⊤
i CiE(t)e(t).
It is easy to see that V(t) is bounded using assumption (2)
since e(t) is bounded; this implies that V(t) is UniformlyContinuous (U.C.). From this point onward, using theBarbalat’s lemma (Khalil (2000)) implies that that:
V(t) → 0 as t→ +∞. (34)
Now in order to prove that:
e(t) → 0 as t→ +∞, (35)
letΦ(t) = CiE(t)e(t). (36)
From Relations (34) and (31) we deduce that:
Φ(t) → 0 as t→ +∞. (37)
The time derivatives of Φ(t) are :
Φ(t) =[
CiE(t)− γCiE(t)E(t)⊤C⊤
i CiE(t)]
e(t), (38)
Φ(t) = CiE(t)e(t)− 2γCiE(t)E(t)⊤C⊤
i CiE(t)e(t) (39)
− γ2CiE(t)E(t)⊤C⊤
i CiE(t)E(t)⊤C⊤
i CiE(t)e(t)
− γCiE(t)E(t)⊤C⊤
i CiE(t)e(t)
− γCiE(t)E(t)⊤C⊤
i CiE(t)e(t).
Using assumption (2) and the fact that e(t) is bounded
imply that Φ(t) is bounded. As Φ(t) is bounded, it follows
that Φ(t) is Uniformly Continuous (U.C). Hence, we use
the Barbalat’s lemma to prove that Φ(t) tends to zero asthe time t tends to infinity, knowing that Φ(t) tends tozero as the the time t tends to infinity, such that:
Φ(t) → 0 as t→ +∞
Φ(t) is U.C.
⇒ Φ(t) → 0 (40)
as t→ +∞.From relations (40) and (38), it simply follows that:
Φ(t) → 0 as t→ +∞
Φ(t) → 0 as t→ +∞
⇒ CiE(t)e(t) → 0 (41)
as t→ +∞,and thus
CiE(t)e(t) → 0 as t→ +∞
CiE(t)e(t) → 0 as t→ +∞
⇒ Ω(t)e(t) → 0 (42)
as t→ +∞ where
Ω(t) =
(
CiE(t)
CiE(t)
)
. (43)
Using assumption (4), the relation (42) implies that:
e(t) → 0 as t→ +∞. (44)
Up to here, the lemma (1) has been demonstrated.
Remark 2. The rank observability condition for the sys-tem (11) is given by:
rank [O(t)] = rank
[
CiE(t)
CiE(t) +CiE(t)A(t)
]
= 3. (45)
Using the relation:
O(t) =
(
CiE(t)
CiE(t) +CiE(t)A(t)
)
=
(
I3 0A(t) I3
)
Ω(t) (46)
where I3 is the squared identity matrix of dimension 3, itfollows that:
rank [O(t)] = rank [Ω(t)] ∀ t ≥ 0. (47)
Consequently, the observability condition is a necessarycondition for the asymptotic convergence of the observa-tion error.
In the following, we consider that the derivative EulerAngles are always varying in order to fullfill one of theobserver existence condition, that is assumption (4).
7. NUMERICAL SIMULATIONS
The numerical simulations aim to simulate the processand therefore to compare the estimated velocities fromthe observers with the real simulated velocities from theidentified nonlinear model presented in section (2). Theprocess is discretized using the fourth-order Runge-Kuttaintegration method with a sample time of 10−4 second.The initializations of the inertial, mechanical and aerody-namic parameters are known and constant. The initializa-tion of the 6-DoF model is given by:
[
x0 y0 z0 u0 v0 w0 φ0 θ0 ψ0 p0 q0 r0]
=[
0 1 1 2 − 1.3 1.3 1.3 0.3 0.2 0.1 0.2 0.1]
.(48)
We simulate the process with the three observers at thesame time (i.e. with the three different configurations ofthe matrix Ci). The initilization of the observer i at thetime t = 0s are iu0,
i v0,i w0,
i γ such that:[1u0,
1 v0,1 w0,
1 γ]
=[
0, 0, 0, 90]
,[2u0,
2 v0,2 w0,
2 γ]
=[
0, 0, 0, 70]
,[3u0,
3 v0,3 w0,
3 γ]
=[
0, 0, 0, 70]
.
(49)
Due to restriction on the paper length, we choose topresent the simulation results of the observer constitutedby the C1 matrix, although the three observers were suc-cessfully tested for many different initializations. Thus,the results show by the figure (5) are the linear velocityestimates 1u,1v ,1w compared to the real linear velocities1u,1v ,1w simulated by the nonlinear indentified modeldescribed in section (2). The figure (6) also shows that theobservation errors 1eu = 1u − 1u, 1ev = 1v − 1v , 1ew =1w − 1w tends to zero over time. Through figure (7), wenoticed that the noise added to the acceleration measure-ments Γ(t) has a weak influence on the observation error.Indeed, after we simulated 1u by using Γ(t) and 1unoisy byusing simulated noisy-accelerometers-signals Γ(t)noisy, thedifference between 1u and 1unoisy denoted 1eu,unoisy
wasstill very low and therefore negligible. The noise added to
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
14384

0 0.2 0.4 0.6 0.8 1
−5
0
5
0 0.2 0.4 0.6 0.8 1
−5
0
5
0 0.2 0.4 0.6 0.8 1
−10
−5
0
temps, [sec]
1u,1u,[m
/s]
1v,1v,[m
/s]
1w,1w,[m
/s]
RealEstimate
Fig. 5. Real and estimated values of linear velocities.
0 0.2 0.4 0.6 0.8 1
0
1
2
0 0.2 0.4 0.6 0.8 1
−1
−0.5
0
0.5
0 0.2 0.4 0.6 0.8 1
−0.5
0
0.5
1
temps, [sec]
1eu,[m
/s]
1ev,[m
/s]
1ew,[m
/s]
Fig. 6. Linear velocities estimation errors.
0 0.2 0.4 0.6 0.8 1
−15
−10
−5
0
5
10
xxxxxxxxxxx
xxxxxxxxxxx
0 0.2 0.4 0.6 0.8 1
−6
−4
−2
0
2
4
x 10−3
temps, [sec]
Γ(t),
[m/s2]
1eu,unoisy,[m
/s]
Γ(t)noisyΓ(t)
(a)
(b)
Fig. 7. (a) Simulated accelerometer signals Γ(t) - (b)Difference between 1u and 1unoisy.
Γ(t) was a random white noise of approximately 30% of themaximum amplitude of the generated signals Γ1(t),Γ2(t)and Γ3(t).
8. CONCLUSION
In this paper we addressed the problem of the linearvelocity estimation of a Gun Launched Micro Air Vehicle(GLMAV) intended for outdoor flight, only using partialmeasurmements of an Inertial Management Unit (IMU).The main contribution concerns the sufficient and simpleasymptotic-stability-proof of the observation error of theproposed linear time-varying reduced-order observer, andbased on an comprehensive and experimentally identifiedGLMAV model. Indeed, simulation results show the effec-tiveness of the proposed Luenberger-like observer, appliedto our linear velocity estimation problem.
REFERENCES
Benzemrane, K., Santosuosso, G.L., and Damm, G. (2007).Unmanned Aerial Vehicle Speed Estimation via Nonlin-ear Adaptative Observers. In American Control Con-ference. New York, USA.
Boutayeb, M., Richard, E., Rafaralahy, H., Ali, H.S., andZaloylo, G. (2008). A Simple Time-Varying Observerfor Speed Estimation of UAV. In IFAC World Congress.Seoul, Korea.
Castillo, P., Lozano, R., and Dzul, A.E. (2005). Mod-elling and Control of Mini-Flying Machines. SpringerAdvances in Industrial Control.
Cerro, J.D., Valero, J., Vidal, J., and Barrientos, A. (2004).Modeling and Identification of a Small Unmanned He-licopter. In Proceedings of IEEE Automation Congress,461–466. IEEE, Seville.
Ganguli, R. (2004). Survey of Recent Developments inRotorcraft Design Optimization. Journal of Aircraft,441(3), 493–510.
Gnemmi, P., Koehl, A., Martinez, B., Changey, S.,and Theodoulis, S. (2009). Modeling and Controlof Two GLMAV Hover-Flight Concepts. Europeanmicro aerial vehicle conference and flight competi-tion, French-German Reasearch Institute of Saint-Louis,Delft, Netherlands.
Khalil, H.K. (2000). Nonlinear Systems. Pearson Educa-tion.
Koehl, A., Boutayeb, M., Rafaralahy, H., and Martinez, B.(2010). Wind-Disturbance and Aerodynamic ParameterEstimation of an Experimental Launched Micro AirVehicle Using an EKF-like Observer. In Proceedingsof the 49th IEEE Conference on Decision and Control.IEEE, Atlanta, USA.
Lancaster, P. and Tismenetsky, M. (1985). The Theory ofMatrices. Academic Press.
Lozano, R. (2010). Unmanned Aerial Vehicles - EmbeddedControl. ISTE Ltd - John Wiley & Sons, Inc.
Smith, T.R., Shook, L., Uhelsky, F., McCoy, E., Krasinski,M., and Limaye, S. (2003). Ballute and Parachute Decel-erators for FASM/QUICKLOOK UAV. In Proceedingsof Aerodynamic Decelerator Systems Technology Con-ference and Seminar. AIAA, Monterey, USA.
Valvanis, K.P. (2007). Advances in Unmanned AerialVehicles State of the Art and the Road to Autonomy.Springer.
Wereley, N.M. and Pines, D.J. (2001). Feasibility Studyof a Smart Submunition: Deployment From a Conven-tional Weapon. ARL-CR-0475, Army Research Labora-tory, Aberdeen Proving Ground.
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
14385