Embed Size (px)
Citation preview

Time Series Analysis of Time Series Analysis of Elephant Acoustic and Elephant Acoustic and
Seismic SignalsSeismic Signals
Alex WilliamsonAlex Williamson
Physics DeptPhysics Dept

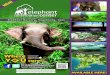
Infrasonic Elephant CallsInfrasonic Elephant Calls Fundamentals in the 10-Fundamentals in the 10-
20 Hz infrasonic range20 Hz infrasonic range Travel in air as sound Travel in air as sound
waves and ground as waves and ground as Rayleigh wavesRayleigh waves
Long distance talking? Long distance talking? Elephants may hear up Elephants may hear up to 4-10 km awayto 4-10 km away
Detect only acoustic Detect only acoustic signals, or seismic signals, or seismic signals also?signals also?
What if speed in ground What if speed in ground different?different?

Data collectionData collection
Two data sets Two data sets studied: studied: Hohenwald Hohenwald
Elephant Sanctuary Elephant Sanctuary in Tennessein Tennesse
Dzanga National Dzanga National Park in the Cental Park in the Cental African RepublicAfrican Republic
http://www.elephants.com/sis_winks_creek.htm
http://www.birds.cornell.edu/brp/elephant/ELPresearchDz.html

Digital SamplingDigital Sampling Sensors: Sensors:
Geophones detect seismic Geophones detect seismic velocitiesvelocities
Microphones detect air pressureMicrophones detect air pressure Translated into proportional Translated into proportional
output voltage.output voltage. Computer measures this Computer measures this
voltage periodically at the voltage periodically at the sampling rate (44,100 times a sampling rate (44,100 times a second for a 44.1 kHz rate)second for a 44.1 kHz rate)
Frequencies above Nyquist Frequencies above Nyquist (half the sampling rate) cause (half the sampling rate) cause aliasing, must be filtered outaliasing, must be filtered out
Worked with data at rates of 1-Worked with data at rates of 1-2 kHz, as signals < 500 Hz2 kHz, as signals < 500 Hz

Cross CorrelationsCross Correlations Determines the phase difference between two digital Determines the phase difference between two digital
signalssignals Used to find time difference between a signal Used to find time difference between a signal
reaching two different sensorsreaching two different sensors Multiplies the signals together and takes the sum, Multiplies the signals together and takes the sum,
repeating for every possible phase combinationrepeating for every possible phase combination

Cross CorrelationsCross Correlations Determines the phase difference between two digital Determines the phase difference between two digital
signalssignals Used to find time difference between a signal Used to find time difference between a signal
reaching two different sensorsreaching two different sensors Multiplies the signals together and takes the sum, Multiplies the signals together and takes the sum,
repeating for every possible phase combinationrepeating for every possible phase combination The result is a data series where the phases with The result is a data series where the phases with
the best fits have the highest valuethe best fits have the highest value In some cases, the peak is hard to determine so a In some cases, the peak is hard to determine so a
low-pass digital filter can be used.low-pass digital filter can be used.

The first signal leads the second by 20The first signal leads the second by 20ππ, ,
which we know is correct.which we know is correct.

Using Cross-CorrelationsUsing Cross-Correlations
Find speed of propagation using multiple Find speed of propagation using multiple sensors, knowing the position of the sensors, knowing the position of the source (and vice versa, a la GPS)source (and vice versa, a la GPS)
In Hohenwald, had two microphones and In Hohenwald, had two microphones and two geophonestwo geophones
X-correlate between the mics for air speedX-correlate between the mics for air speed Between the geophones for ground speedBetween the geophones for ground speed

Using Cross-CorrelationsUsing Cross-Correlations

Digital filteringDigital filtering
A time series is digitally A time series is digitally filtered by running each filtered by running each data point through the equation:data point through the equation:a1yn = b1xn + b2xn-1 + ... + bnb+1xn-nb
- a2yn-1 - ... - ana+1yn-na
where where aa & & bb are vector characteristic to the filter are vector characteristic to the filter

Advantages and UsesAdvantages and Uses
Matlab’s “filtfilt” function avoids phase problems Matlab’s “filtfilt” function avoids phase problems filtering by running filtered signal through filter filtering by running filtered signal through filter again in the opposite order, reversing phase again in the opposite order, reversing phase shifts and doubling filter strength.shifts and doubling filter strength.
Filter used for:Filter used for: Getting rid of narrow-band electrical noise, such as 60 Getting rid of narrow-band electrical noise, such as 60
Hz humHz hum Focus on specific frequency bands individually, as Focus on specific frequency bands individually, as
some bands were noisier than otherssome bands were noisier than others Digitally undo analog filteringDigitally undo analog filtering

Attenuation from 200 meter callsAttenuation from 200 meter calls
Octave band filtering (5-10 Hz, 10-20, 20-40, Octave band filtering (5-10 Hz, 10-20, 20-40, etc) on four elephant calls, background etc) on four elephant calls, background noise samples from similar time, and noise samples from similar time, and electrical noise model for accuracy baselineelectrical noise model for accuracy baseline
Found RMS values of filtered signalsFound RMS values of filtered signals Convert to velocities using freqency-based Convert to velocities using freqency-based
gain factor (taking out filters for real speeds)gain factor (taking out filters for real speeds) Found acceleration and displacement by Found acceleration and displacement by
multiplyingmultiplying and and dividingdividing by by ωω

Attenuation from 200 meter callsAttenuation from 200 meter calls

Signal to noiseSignal to noise
Signal and noise orthogonal so Signal and noise orthogonal so SSrmsrms
22=T=Trmsrms22-N-Nrmsrms
22 to separate signal from to separate signal from
backgroundbackground Used four different noise samples, and Used four different noise samples, and
averaged ratios in plot.averaged ratios in plot. Power is proportional to the voltage Power is proportional to the voltage
squared, and falls off at 1/r (vs 1/rsquared, and falls off at 1/r (vs 1/r22 for air for air during day)during day)

Signal to noiseSignal to noise

Future PlansFuture Plans What problems with data and analysis?What problems with data and analysis?
High noise levelsHigh noise levels Over-filteringOver-filtering Phase problemsPhase problems
What will we want to do differently in future What will we want to do differently in future measurements?measurements? Multiple sensorsMultiple sensors Uniform filteringUniform filtering Avoid human interferenceAvoid human interference
Plans for Syracuse Zoo next month:Plans for Syracuse Zoo next month: Use new shaker (R2D3)Use new shaker (R2D3) Mechanical model of elephant legMechanical model of elephant leg Sound of a footstepSound of a footstep