-
8/2/2019 Time-Constrained Project Scheduling
1/16
Time-Constrained Project Scheduling
T.A. GuldemondORTEC bv, PO Box 490, 2800 AL Gouda, The
Netherlands
J.L. Hurink, J.J. Paulus, and J.M.J. SchuttenUniversity of
Twente, PO Box 217, 7500 AE Enschede, The Netherlands,
[email protected]
We study the Time-Constrained Project Scheduling Problem
(TCPSP), in which the scheduling of activitiesis subject to strict
deadlines. To be able to meet these deadlines, it is possible to
work in overtime orhire additional capacity in regular time or
overtime. For this problem, we develop a two stage heuristic.The
key of our approach lies in the first stage in which we construct
partial schedules with a randomizedsampling technique. In these
partial schedules, jobs may be scheduled for a shorter duration
than required.The second stage uses an ILP formulation of the
problem to turn a partial schedule into a feasible schedule,and to
perform a neighbourhood search. The developed heuristic is quite
flexible and, therefore, suitable forpractice. We present
experimental results on modified RCPSP benchmark instances. The two
stage heuristic
solves many instances to optimality, and if we substantially
decrease the deadline, the rise in cost is onlysmall.
1. Introduction
The problem addressed is a project scheduling problem with
strict deadlines on the activities, whichwe call the
Time-Constrained Project Scheduling Problem (TCPSP). In many
project schedulingproblems from practice, deadlines occur and in
order to meet these deadlines, different ways tospeed up the
project are given, e.g., by working in overtime, hiring extra
resource capacity, oreven outsourcing (parts of) the project. All
these options are costly but often not avoidable. Thus,
the question arises how much, when, and what kind of extra
capacity should be used to meet thedeadlines against minimum
cost.The TCPSP is a variant of the well studied RCPSP
(Resource-Constrained Project SchedulingProblem). For an overview
of the literature on the RCPSP see, e.g., Herroelen et al.
(1998),Kolisch and Hartmann (1999), and Kolisch and Padman (2001).
However, there are fundamentaldifferences between the
time-constrained and the resource-constrained variant. In the
first, thedeadlines cannot be exceeded and resource profiles may be
changed, whereas in the second, theresource availability cannot be
exceeded. Moreover, in the TCPSP, a non-regular objective
functionis considered. Therefore, most existing solution techniques
of the RCPSP are not suitable for theTCPSP. Although the TCPSP
occurs often in practice, it has been considered only rarely in
theliterature. Deckro and Herbert (1989) give an ILP formulation
for the TCPSP and discuss the
concept of project crashing. In project crashing, it is possible
to decrease the processing time of anactivity by using more
resources, see also Kis (2005) and Li and Willis (1993). In
practice, however,there are only limited possibilities to crash an
activity and these possibilities can therefore becaptured in the
concept of multi-mode scheduling. Kolisch (1995) discusses a
heuristic procedurefor the TCPSP with limited hiring. None of the
literature on TCPSP considers the concept ofovertime.The TCPSP has,
besides to the RCPSP, some relation to the time driven rough-cut
capacityplanning problem, see Gademann and Schutten (2005). The
rough-cut capacity planning problemis about finding the appropriate
capacity level on a tactical decision level, while the TCPSP is
onan operational decision level.In this paper, we fill a gap in the
literature on the TCPSP. To the best of our knowledge, for
1
-
8/2/2019 Time-Constrained Project Scheduling
2/16
Guldemond et al.: Time-Constrained Project Scheduling
2
the first time the concept of overtime and multiple forms of
irregular capacity is included in themodelling of the TCPSP.The
outline of the paper is as follows. Section 2 gives a detailed
problem description and presentstwo ILPs to model the TCPSP. The
first model takes into account only hiring in regular time.
Thesecond model also deals with working and hiring in overtime. To
solve the TCPSP, we develop in
Section 3 a two stage heuristic. The first stage of the
heuristic constructs a partial schedule. Thekey of the approach
lies in this first stage, where jobs may be scheduled for a shorter
duration thanrequired. The second stage turns the partial schedule
into a feasible schedule. The goal of this twostage approach is to
spread the usage of irregular capacity evenly over the planning
horizon. Section4 concerns the computational results. The test
instances used are RCPSP benchmark instancesfrom the PSPlib, see
Kolisch and Sprecher (1997b), that are modified into TCPSP
instances.Section 5 concludes this paper.
2. Problem description and ILP formulations
In this section, we describe the Time-Constrained Project
Scheduling Problem (TCPSP) and for-mulate it as an integer linear
program (ILP). First, we consider the TCPSP with hiring in
regulartime only, to get a thorough understanding of the problem.
Second, we consider the TCPSP withworking in overtime, and hiring
in regular time and in overtime. Due to the complexity of
theproblem, we cannot expect to solve the TCPSP via this ILP-model.
However, we present the ILPssince the heuristic presented in
Section 3 makes use of the ILP formulation to get a feasible
solutionand to perform a neighbourhood search.
2.1. TCPSP with hiring in regular time
For the TCPSP, a set of n jobs, {J1,...,Jn}, each job Jj with a
release date rj and a deadline dj ,has to be scheduled without
preemption on a time horizon [0, T]. This time horizon is divided
intoT time buckets, t = 0,...,T 1, where time bucket t represents
the time interval [t, t + 1]. (In thefollowing, we will use T to
refer to both the set of time buckets and the horizon [0 , T].) The
releasedate rj gives the first time bucket in which job Jj is
allowed to be processed and its processinghas to be finished before
dj, i.e., dj 1 is the last time bucket where it is allowed to work
on
job Jj. For processing the jobs, a set of K resources,
{R1,...,RK}, is available, where resource Rkhas a capacity Qkt in
time bucket t. To hire one extra unit of resource Rk in time bucket
t, anamount cHkt has to be paid. The processing of the jobs is
restricted by precedence relations, whichare given by sets of jobs
Pj , denoting all direct predecessors of job Jj . These precedence
relationshave non-negative time lags lij , indicating that the
start of job Jj is at least lij time buckets laterthan the
completion of job Ji. For each job Jj , a set Mj of different
execution modes is given. Eachmode m Mj has a specified processing
time pjm and during the processing of job Jj in mode mit requires
qjmk units of resource Rk.To model this variant of the TCPSP, we
employ one type of binary decision variables xjmt that are
equal to 1 if job Jj is being processed in time bucket t in mode
m. To formulate the problem asan ILP, we use three types of
variables that can be deduced from the variables xjmt . First, we
usebinary variables jm that are equal to 1 if job Jj is processed
in mode m. Second, we use binaryvariables sjmt that are equal to 1
if time bucket t is the first time bucket where job Jj is
beingprocessed and mode m is used to perform it. Finally, the
nonnegative variables Hkt represent theamount of capacity hired of
resource Rk in time bucket t.Now the TCPSP with hiring in regular
time can be modelled by the following ILP:
minimize:K
k=1
T1t=0
cHktHkt (1)
-
8/2/2019 Time-Constrained Project Scheduling
3/16
Guldemond et al.: Time-Constrained Project Scheduling
3
subject to:
mMj
jm = 1 j (2)
dj1
t=rj
xjmt =pjmjm j, m Mj (3)n
j=1
mMj
qjmkxjmt Qkt + Hkt k, t (4)
mMj
djpjmt=rj
sjmt = 1 j (5)
xj,m,0 = sj,m,0 j, m Mj (6)xjmt xj,m,t1 + sjmt j, m Mj, t > 0
(7)
mMi
dipim
t=
ri
t simt+
mMi
pimim + lij
mMj
djpjm
t=
rj
t sjmt j, Ji Pj (8)
sjmt = 0 t / {rj ,...,dj pjm} (9)xjmt = 0 t / {rj ,...,dj 1}
(10)jm {0, 1} j, m Mj (11)
xjmt {0, 1} j, m Mj, t (12)sjmt {0, 1} j, m Mj, t (13)Hkt 0 k, t
(14)
The objective function (1) minimizes the total hiring costs. Due
to constraint (2), exactly onemode is selected for each job.
Constraint (3) ensures that each job is processed for the
requiredduration between the release date and the deadline, and
that the variables jm and xjmt areconsistent. Constraint (4)
ensures that the amount of required resource does not exceed the
amount
of available resource, using regular capacity and hiring.
Constraints (5), (6), and (7) guarantee thenon-preemption
requirement, and that the variables sjmt and xjmt are consistent.
Each job Jj startsexactly once in one of its modes, and the
processing of job Jj in time bucket t is only allowed if jobJj is
being processed in time bucket t 1 or it starts in time bucket t.
The precedence relationswith time lags are managed in constraint
(8); the start time of job Ji plus its processing time andthe time
lag lij is less than or equal to the start time of job Jj, whenever
job Ji is a predecessorof job Jj. Constraints (9) and (10) put all
non-relevant sjmt and xjmt variables to zero. Finally,constraints
(11) to (14) define the domain of the variables.
2.2. TCPSP with working in overtime, and hiring in regular time
and in overtime
In this section, we extend the model of the previous section,
such that it can handle the TCPSP
with working in overtime, and hiring in regular time and in
overtime. This extension requires extraeffort, due to the different
usage of time buckets. A time bucket in overtime has different
propertiesthan a regular time bucket during a work day.
Furthermore, we have to handle the following tworequirements. As
before, preemption is not allowed during regular time. However, it
is allowed towork (without gaps) in some of the time buckets in
overtime, then stop and continue the work inthe next regular time
bucket or in a subsequent block of overtime, if no regular time is
in betweenthese two blocks of overtime. The second requirement is
on working in overtime. If personnel workin one time bucket in
overtime, they have to work from the beginning of that overtime
block untilthat time bucket.To cope with the modified
non-preemption requirement, we take a different view on the time
buck-ets. We define one chain of regular time buckets T0 =
{t01,...,t
0N0
}, and L chains of time buckets that
-
8/2/2019 Time-Constrained Project Scheduling
4/16
Guldemond et al.: Time-Constrained Project Scheduling
4
are available for working in overtime Tl = {tl1,...,tlNl
}, l = 1,...,L. For each chain of overtime timebuckets Tl, there
is an index l {1,..,N0} that indicates the last regular time bucket
(t
0
l T0)
before the start of the chain Tl. Furthermore, we assume that
the chains do not overlap in timeand that the overtime chain Tl+1
is later in time than the overtime chain Tl. If the first
timebucket is not regular time but overtime, we introduce an
artificial regular time bucket to start
with. This way we have the time horizon [0,
Ll=0 Nl], and the corresponding set of time buckets
T is the union of all chains, i.e., T = Ll=0Tl. As a
consequence, each time bucket t T belongs to
one unique chain Tl, l {0,...,L}. Due to the above mentioned
constraints, the set of time bucketsitself is also a chain, so we
can compare each pair of time buckets, no matter whether these
timebuckets are in regular time or overtime. The modified
non-preemption requirement can now bestated as follows. If a job is
processed on two time buckets of a chain Tl, it is also processed
in alltime buckets in between these two time buckets, and if a job
is processed in two different overtimechains Tk and Tl, 1 k < l
L, than this job has to be processed in all regular time
buckets{t0
k+1, t0
k+2,...,t0
l} T0. Note that it is possible that certain regular time
buckets are followed by
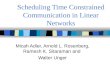
more than one chain of overtime time buckets.Consider the
following example. For processing, we have 8 regular hours
available on Friday and
Monday, and 4 overtime hours on Friday evening, 8 on Saturday
and again 4 on Monday evening.This means that T0 = {F r1,...,Fr8, M
o1,...,Mo8}, T
1 = {F r9,...,Fr12}, T2 = {Sa1,...,Sa8} and
T3 = {M o9,...,Mo12}. Furthermore, t01 = t0
2= F r8 and t
0
3= M o8. Figure 1 illustrates this exam-
ple.
M o1
T2 : Sa1
Sa8
M o8
M o9T1 : F r9
F r8F r1T0 :
T : F r1 F r8 F r9 Sa1 Sa8 M o1 M o8 M o9
T3 :
F r12 M o12
F r12 M o12Figure 1 Chains of time buckets.
Within this new concept of time chains, using general time lags
for the precedence relations leadsto problems. They are not
properly defined anymore, since it is not clear if the time lags
only referto regular time buckets or also to overtime time buckets.
Consider the following example. If thetime lag is a consequence of
a lab test that has to be done between two processes, the
openinghours of the lab determine to which time buckets the time
lag applies. To overcome this problem,it is possible to introduce a
dummy job and a dummy resource for each time lag. With the
properresource requirements for each dummy job, time lags can have
any desired property with respectto regular and overtime time
buckets. Therefore, for the problem considered in this subsection,
werestrict ourselves to standard precedence relations, indicating
that a job Jj can only start after thecompletion of job Ji, i.e.,
we assume that the corresponding lij values are all 0.We are now
ready to model the problem with working in overtime, and hiring in
regular time andin overtime. In addition to the parameters already
used in the previous model, we have costs cOktand cHOkt for one
extra unit of resource Rk in time bucket t as working in overtime
and hiring in
-
8/2/2019 Time-Constrained Project Scheduling
5/16
Guldemond et al.: Time-Constrained Project Scheduling
5
overtime, respectively.To model the different types of
capacities, we introduce variables Okt and HOkt representing
theamount of capacity made available through working in overtime
and hiring in overtime respectively,for resource Rk in time bucket
t. For ease of notation, we define p
maxj := maxmMj pjm .
The TCPSP with working in overtime, and hiring in regular time
and overtime can be modelled
by the following ILP:
minimize:K
k=1
tT0
cHktHkt +
tT\T0
(cOktOkt + cHOkt HOkt)
(15)
subject to:
mMj
jm = 1 j (16)
dj1t=r
j
xjmt =pjmjm j, m Mj (17)
nj=1
mMj
qjmkxjmt Qkt + Hkt k, t T0 (18)
nj=1
mMj
qjmkxjmt Okt + HOkt k, t T\ T0 (19)
Ok,tl1
Qk,t0l
l 1, k (20)
Ok,tlh
Ok,tlh1
l 1, h > 1, k (21)
mMj
djpjmt=rj
sjmt = 1 j (22)
xj,m,t01 = sj,m,t01 j, m Mj (23)xj,m,t0
h xj,m,t0
h1+ sj,m,t0
h+
t
{l|l=h1}Tl
sj,m,t j, m Mj , h 1 (24)
xj,m,tl1
xj,m,t0l
+ sj,m,tl1
+
t{t|t 1, l 1,j,m Mj (26)
pmaxi
1
mMj
sj,m,t
tt
mMi
ximt t T, Jj , Ji Pj (27)
sjmt = 0 t / {rj ,...,dj pjm} (28)xjmt = 0 t / {rj ,...,dj 1}
(29)
jm {0, 1} j, m Mj (30)xjmt {0, 1} j, m Mj , t T (31)sjmt {0, 1}
j, m Mj , t T (32)Hkt 0 k, t T
0 (33)Okt 0 k, t T\ T
0 (34)HOkt 0 k, t T\ T
0 (35)
The objective function (15) minimizes the total weighted costs.
Constraints (16), (17), and (18)are equivalent to (2), (3), and
(4), describing the mode selection, the processing time, and
theresource requirement, respectively. In addition to the resource
requirement constraint (18), we have
-
8/2/2019 Time-Constrained Project Scheduling
6/16
Guldemond et al.: Time-Constrained Project Scheduling
6
constraint (19) for the resource requirement in overtime time
buckets. The resource used in anovertime time bucket may not exceed
the amount that is available through working in overtime andhiring
in overtime. Constraints (20) and (21) forces the amount of work in
overtime to be decreasingin each chain of overtime, ensuring that
if personnel work in one bucket in overtime, they were
alsoavailable in the previous time bucket of that overtime chain
and, thus, work in overtime from the
start of that overtime sequence. Constraint (22) ensures that
each job starts exactly once in one ofthe available modes. The
modified non-preemption requirement is specified in constraints
(23) to(26). In constraint (23), we guarantee that job Jj is
processed in mode m in the first time bucketof T0 if it also starts
in that time bucket and in that mode. For the other regular time
buckets,constraint (24) ensures that job Jj is processed in mode m
if it is processed in the previous regulartime bucket, or starts in
this regular time bucket, or starts in an overtime directly
succeeding thelast regular time bucket. For processing in overtime
time buckets, constraint (25) states that weare allowed to work on
a job Jj in mode m in the first time bucket of an overtime chain if
we workon it in the last regular time bucket, or we start the job
at this time bucket, or the job starts inan overtime time bucket
which succeeds the last regular time bucket, but preceding this
overtimetime bucket. Constraint (26) states that it is only allowed
to work on a job Jj in mode m in a
time bucket that is not the start of an overtime chain, if that
is done also in the previous overtimetime bucket or it is starts in
this overtime time bucket. The precedence relations are managed
inconstraint (27). If job Jj starts in time bucket t, then the left
hand side of the constraint becomeszero, implying that in none of
the time buckets after t there can be worked on job Ji, i.e., job
Ji isalready finished before t. On the other hand, if job Jj does
not start in time bucket t, constraint(27) gives no restriction.
Constraints (28) and (29) put all non-relevant sjmt and xjmt
variables tozero. Finally, constraints (30) to (35) define the
domain to the variables.The presented model cannot only deal with
working in overtime, and hiring in regular time andovertime, but
also with the possibility to outsource. Outsourcing can be included
by introducinga mode for each job which represents the outsourcing.
We introduce for such an outsource modea processing time and a
resource requirement for an artificial resource which has to be
hired. Theprocessing time of this mode and the cost for hiring
correspond to the outsourcing.
3. Solution Approach
In the previous section, we presented two ILPs, one to model the
TCPSP with hiring and oneto model the TCPSP with working in
overtime, and hiring in regular time and in overtime. Sinceboth of
these problems are NP-hard, see Neumann et al. (2002), we cannot
expect to solve largeinstances with the ILP-formulations.
Therefore, we present in this section a heuristic approach. Wefocus
on the second problem which takes into account all possibilities
for extra capacity. Beforepresenting our two stage heuristic, we
indicate which difficulties one encounters when attackingthe TCPSP
and thereby motivating our approach.
3.1. Motivation
When scheduling jobs, it is preferable to use as few work in
overtime, and hiring in regular timeand in overtime as possible,
since these add to the costs. A standard serial planning heuristic
startsscheduling jobs completely using only regular time and
available resources as long as possible. Onlyif a job would miss
its deadline, working in overtime and hiring capacity comes into
the picture.In our experience, using such a strategy results in bad
solutions, if we get a solution at all. Thereason for this is that
bottlenecks get shifted towards the end of the horizon. However,
the bestsolution might be to hire a small amount at the beginning
to avoid costly situations when fittingin the last jobs at the end
of the horizon. Scheduling the jobs one by one in a greedy fashion
shiftssuch problematic situations towards the end of the horizon,
which can make them grow large.Therefore, we propose to schedule
the jobs only partially in a first stage, using only regular time
and
-
8/2/2019 Time-Constrained Project Scheduling
7/16
Guldemond et al.: Time-Constrained Project Scheduling
7
hire extra resource capacity only if necessary. The first stage
consists of a serial planning, where onlya certain fraction of each
job is scheduled. Afterwards, we gradually increase the fraction
the jobsare scheduled, within the available regular time. The
resulting schedule does not use overtime andgenerally contains only
parts of the jobs. In this way, we try to prevent the shifting of
problematicsituations: All jobs are partially admitted in the
schedule before we address the bottlenecks. In the
second stage, we extend the jobs to their required length by
using capacity that is still free, workingin overtime, and hiring
in regular time and overtime. The goal is to create a feasible
schedule, inwhich the usage of irregular capacity is spread evenly
over the planning horizon. The final part ofthe second stage
consists of a neighbourhood search to improve the constructed
schedule.The first stage is realized with a randomized sampling
technique. When constructing the partialschedule job by job, jobs
and modes are selected with a certain probability. For a given
instance,in the first stage a number of different schedules are
generated. These will be made feasible in thesecond stage, and on
the best of these schedules a neighbourhood search will be
performed. Thenext section gives a detailed description of the two
stage heuristic.
3.2. Two Stage Heuristic
3.2.1. Initialization In the initialization, we calculate
modified release dates and modifieddeadlines, which are sharp
bounds on the start and completion times of the jobs. From
thesemodified release dates and modified deadlines, we can
determine in advance, if there exists a feasibleschedule.The
modified release date rj of a job Jj is the first time bucket, such
that if the job starts inthis time bucket, all its predecessors can
be scheduled if there is infinite resource capacity, bothin regular
time and overtime. The modified deadline dj of a job Jj is the last
time bucket, suchthat if the job finishes the bucket before, all
its successors can still be scheduled if there is infiniteresource
capacity, both in regular time and overtime. A feasible schedule
exists if and only if foreach job Jj the interval [rj , dj ] is
large enough to process the job Jj in one of its modes.The modified
release dates rj can be calculated by a forward recursion through
the precedence
network:
rj := max {rj , maxiPj
{ri + minmMi
pim}} , j. (36)
With a backward recursion, we calculate the modified deadlines
dj :
dj := min {dj , min{i|jPi}
{di minmMi
pim}} , j. (37)
All time windows, the time between the modified release date and
modified deadline, should belarge enough to accommodate the job in
one of its modes:
dj rj minmMjpjm , j. (38)
Note that the modified release dates and modified deadlines are
calculated with respect to the timehorizon T.
3.2.2. Stage 1 In the first stage, we generate a schedule
containing all jobs, but probablyonly for a shorter duration than
necessary, using only regular time and hiring only if necessary.We
generate the partial schedule with a randomized sampling procedure
and then try to improveit by extending the partially scheduled
jobs. For each job Jj, we are going to determine a starttime Sj rj
, a completion time Cj < dj, and a mode m Mj such that in [Sj,
Cj ] there is enoughtime available to process job Jj in mode m.
However, at this first stage we assign only the regular
-
8/2/2019 Time-Constrained Project Scheduling
8/16
Guldemond et al.: Time-Constrained Project Scheduling
8
time in [Sj , Cj] to job Jj . We aim to create a partial
schedule such that each job is scheduled forat least a fraction a0
[0, 1] in regular time. However, there is no strict guarantee that
each jobreaches this fraction. We can only ensure that the assigned
starting and completion times allowfor a feasible solution using
overtime and hiring extra capacity.In a serial manner, we select
jobs and corresponding modes and include them in the schedule.
Next,
we describe this selecting and scheduling in detail.Let Djobs
denote the decision set from which we select the job to be
scheduled next. The set Djobscontains all jobs for which all
predecessors are already in the current schedule. Initially,
Djobs := {Jj |Pj = }.
In each iteration, we select a job from the decision set Djobs.
For each job Jj Djobs, we determinea priority j . This priority
depends on how early the job can start. Let ejm (earliest mode
start)denote the earliest start time of job Jj in mode m. The ejm
is the smallest time bucket in T,greater than or equal to the
modified release date rj and greater than the completion times of
jobJjs predecessors, such that for each of the a0 pjm regular time
bucket following ejm still enoughresource capacity is available to
schedule job Jj in mode m. Recall that we only wish to schedule
job Jj for a fraction a0, and only in the regular time T0.
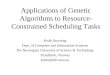
For each job Jj and each mode m Mj , we define the slack, sljm,
with respect to T0. Let themaximum of these slack values denote the
slack of job Jj, slj (see Figure 2).
sljm := dj a0 pjm ejm , Jj Djobs, m Mjslj := max
mMj{sljm} , Jj Djobs.
It is possible that the slack of a job becomes negative,
implying that we cannot schedule the job fora fraction a0 without
hiring and working in overtime. As a consequence we either have to
schedulethis job for a smaller fraction at this stage or hire a
small amount of resources in regular time toenlarge the fraction
for which this job is scheduled in regular time. We get back to
this problem
later.If a job has a small slack value, there is not much room
to manoeuvre this job and therefore weprefer to schedule this job
next. Such a job gets a high priority. More precisely, the priority
valueof job Jj becomes:
j := maxJiDjobs
{sli} slj , Jj Djobs.
Note that j 0. To get strictly positive selection probabilities
for each job in Djobs, we add 1 tothe priority, before we normalize
these priority values to get the selection probability j of
selecting
job Jj:
j := (j + 1)
JiDjobs
(i + 1), Jj Djobs,
where the value of lies in [0, ], and indicates the importance
of the priority value when selectinga job. If equals 0, jobs are
selected uniformly at random from Djobs. If tends to infinity,
the
job with the highest priority gets selected
deterministically.
After selecting a job Jj from Djobs, we do not directly select
the mode m Mj which led to themaximal slack slj , but use again a
randomized sampling to determine the mode. However, noteach mode in
Mj is suitable for selection. The decision set Dmodes Mj only
contains those modesthat have a duration pjm such that it fits
between the maximum of the completion times of the
-
8/2/2019 Time-Constrained Project Scheduling
9/16
Guldemond et al.: Time-Constrained Project Scheduling
9
rj dj T0
slj1 = slj
slj2
ej3ej2ej1
a0 pj1
a0 pj2
a0 pj3
slj3(< 0)
Figure 2 Derivation of the slack of job Jj .
predecessors of job Jj and the modified release date, and the
modified deadline (with respect toT). Selecting another mode would
lead to infeasibility of job Jj, since scheduling this job in such
amode causes this job or one of its successors to exceed its
deadline. Note that if we guarantee that
the completion times of the jobs are bounded by the modified
deadlines, we always have Dmodes = .We prefer a mode that enables
the job to complete early, since a late completion time hindersthe
jobs that still have to be scheduled. Thus, we are looking for the
modes with a large slack.This leads to priorities m on the modes,
which we normalize to get selection probabilities m(comparisons
done with respect to T0):
m := sljm minmDmodes
{sljm} , m Dmodes
m :=(m + 1)
mDmodes
(m + 1), m Dmodes,
where lies in [0, ] indicating the importance of the priority.
Again, we add 1 to the priorities
to get strictly positive selection probabilities.Now that we
have selected a job and one of its modes, we determine its start
and completion time,Sj T and Cj T respectively. Since the job Jj
gets scheduled onto the regular time buckets in[Sj , Cj ], for Sj
and Cj the following must hold to ensure that we get a feasible
interval for job Jjand leave enough room for the remaining jobs to
be scheduled feasible:
rj Sj (39)
Cj < dj (40)Ci < Sj , Ji Pj (41)
Cj Sj + 1 pjm , with respect to T. (42)
There can be many pairs (Sj , Cj) satisfying these constraints.
Therefore, we select from these onepair by applying the following
criteria, in the presented order:1. Select a pair that hires as
less as possible.2. Select a pair that minimizes max{0, a0 pjm Cj +
Sj}, with respect to T0.3. Select a pair that minimizes Cj .4.
Select a pair that maximizes Sj.
After the first three criteria there may be still several pairs
left, whereas after criterion 4 the valuesfor Sj and Cj are
uniquely determined. Due to constraints (39) to (42), it might be
necessary tohire resources in regular time, but via criterion 1 we
try to avoid this. The second criterion statesthat we select from
the remaining start and completion times, those that schedule the
job withminimal shortage to the fraction a0. In Figure 3 an example
is given, where no shortage occurs.
-
8/2/2019 Time-Constrained Project Scheduling
10/16
Guldemond et al.: Time-Constrained Project Scheduling
10
This way we try to schedule each job for the desired fraction.
The third criterion gives, from theremaining start and completion
times, those that minimize the completion time, not to hinderthe
jobs that still have to be scheduled. Finally, we choose from the
remaining pairs of start andcompletion time, the pair that
maximizes Sj.
y zx
pjm
T
T0
Sj Cj
x + y + z a0 pjmFigure 3 Schedule jobs only within regular
time.
If all jobs are partially scheduled, it might be possible to
improve this partial schedule by extendingthe processing time of
jobs within regular time, such that they are scheduled for a larger
fraction.To prevent the shifting of problematic situations, we
would like to spread this increase evenly overall jobs. Therefore,
we use a procedure that repeatedly tries to extend the jobs to a
higher fraction,going through the schedule alternating from back to
the front and from the front to the back. Let(a0, a1, . . . , ak)
denote a non-decreasing sequence of fractions that we apply, where
a0 equals thefraction used in the randomized sampling. One
extension step consists of a backward and a forwardextension. In
the ith backward extension, we scan the current schedule from the
back to the frontand search for each job Jj new start and
completion times satisfying (39) to (42), by the followingfour
criteria in the presented order:
1. Select a pair that requires no more hiring than before.2.
Select a pair that minimizes max{0, ai pjm Cj + Sj}, with respect
to T0.3. Select a pair that maximizes Sj.4. Select a pair that
minimizes Cj .
The ith backward extension is followed by the ith forward
extension, which is a mirrored version ofthe ith backward
extension.
3.2.3. Stage 2 The result of Stage 1 is a schedule containing
all jobs in one of their modes,but only scheduled in regular time
and not necessarily for the required length. In Stage 2, weuse
working in overtime and hiring in regular time and overtime to get
a feasible solution of theTCPSP. The main idea to get a feasible
solution is the following. Iteratively, for each job Jj that is
not scheduled for its required duration, we solve an ILP. This
ILP is given by a restricted versionof the ILP in Section 2.2,
where all jobs but job Jj get frozen as they are in the current
schedule,job Jj gets fixed to its current mode, and only the timing
of job Jj is left to the solver. Moreprecisely, we deduce a release
date and deadline for job Jj , imposed by the current schedule and
themodified release date and modified deadline, and we deduce the
capacity that is still available. Forthe regular time buckets, this
is the original capacity minus that what is used by the other
frozen
jobs in the current schedule. For the overtime time buckets,
this is the work in overtime that isimposed by other jobs, but not
used as a consequence of constraint (21). We take constraints
(17)to (35) from the ILP of Section 2.2. The solver returns the
timing of the job Jj and the use ofirregular capacity. This,
together with the frozen jobs, gives a schedule that is the same as
beforeexcept for the scheduling of job Jj . Job Jj is now scheduled
for its required duration. Again, the
-
8/2/2019 Time-Constrained Project Scheduling
11/16
Guldemond et al.: Time-Constrained Project Scheduling
11
requirements (39) to (42) on the start and completion times Sj
and Cj of job Jj, ensure that thereis always a feasible scheduling
of job Jj . At the end of this iterative process, we have a
feasiblesolution for the TCPSP.The order in which the jobs are
extended to their required duration, can be chosen through
numer-ous criteria. Possible orderings are: Smallest scheduled
fraction (aj) first, largest unscheduled pro-
cessing time ((1 aj)pjm) first, and an ordering deduced from the
precedence network.Now that we have a feasible schedule for the
TCPSP, we apply a neighbourhood search to improveupon this feasible
schedule. We use a neighbourhood search based on a method proposed
by Pal-pant et al. (2004). This method selects a number of jobs,
freezes the remainder of the schedule,and calculates for the
resulting ILP an optimal schedule. It is similar to the first part
of Stage 2,but now the timing and mode selection of a small number
of jobs is left to the ILP-solver. Sincewe optimize on more than
one job and we allow for mode changes, we need the complete ILP
ofSection 2.2. One iteration of the neighbourhood search goes as
follows:
1. Select a subset of the jobs JNeighbour {J1,...,Jn}.2. Freeze
all jobs Jj / J
Neighbour.3. Determine release dates, deadlines, available
capacities and precedence relations for the jobs
in JNeighbour
.4. Solve the resulting ILP.There are numerous ways to select a
subset JNeighbour of jobs, for example, Palpant et al. propose1) to
select a job and then also select all its predecessors, or 2)
select a job and then also select all
jobs scheduled parallel with, and contiguous to it. One can
think of many more selection criteria,but the main idea is not to
select jobs arbitrarily, but to select jobs that occur close to
each otherin the schedule. Otherwise, there is not much to improve,
i.e., the neighbourhood is too small.
4. Computational results
This section describes the setup of the computational tests and
the results for testing the solutionapproach presented in this
paper. Since we are the first to attack the TCPSP with working
in
overtime, and hiring in regular time and overtime, we cannot
compare the presented heuristic withany existing method. However,
there is much known for the RCPSP. Therefore, we take
benchmarkinstances of the RCPSP and transform them into instances
of the TCPSP. This is done in sucha way that we can draw
conclusions towards the quality of the TCPSP solutions. This
sectionstarts with describing the transformation of the instances
and the setting of the parameters in theheuristic, before
presenting the computational results.
4.1. Construction of TCPSP instances
For the RCPSP, a set of benchmark instances called PSPlib is
generated by Kolisch and Sprecher(1997b), Kolisch et al. (1995),
and can be found on the web Kolisch and Sprecher (1997a).
Theseinstances have been employed in many studies, for example by
Demeulemeester and Herroelen
(1997), Kolisch and Drexl (1996) and Kolisch et al. (1995). We
transform these RCPSP instancesinto TCPSP instances. We restrict
ourself to single mode instances.To transform the instances from
the PSPlib into TCPSP instances, two additional aspects have tobe
introduced. First, we need to define the overtime and hiring
possibilities with their associatedcosts, and second we need to
introduce deadlines.The TCPSP distinguishes between regular and
overtime time units, where the RCPSP has onlyone type of time
units. We let each time unit from the RCPSP correspond to a regular
time unit inthe TCPSP. In addition, we introduce overtime in a
weekly pattern. Day 1 of the week, the Sunday,contains only 8
overtime time units. Day 2 to 6, the weekdays, start with 8 regular
time units,followed by 4 overtime time units. Day 7, the Saturday,
contains again only 8 overtime time units.This weekly pattern is
repeated until the deadline of the instance is reached. All other
aspects,
-
8/2/2019 Time-Constrained Project Scheduling
12/16
Guldemond et al.: Time-Constrained Project Scheduling
12
like job durations, precedence relations, resource availability,
and resource requirements remainunchanged.To get insight in the
quality of the solution generated by the two stage heuristic, we
compare theTCPSP solution with the RCPSP solution. A comparison can
be made if we set all costs equal to1 and let the deadline of all
jobs be the (best known upper bound to the) minimum makespan of
the RCPSP instance. This means that the number of regular time
buckets before the deadline inthe TCPSP, is exactly the (best known
upper bound to the) minimum makespan of the RCPSPinstance. The
quality of the schedule is given by its costs. If a schedule has
zero costs, the twostage heuristic gives the optimal (best known)
schedule for the RCPSP instance. If not, the costsof the schedule
give an indication on how far we are from the best known schedule,
i.e., it givesthe amount of irregular capacity used to reach the
best known makespan.Setting all costs equal to 1 implies that
working in overtime is equally costly as hiring in regulartime or
overtime. This does not fit the real world situation, but it allows
us to measure the totalamount of irregular capacity needed. Note
that due to constraint (21) and all costs equal to 1,hiring in
overtime is at least as good as working in overtime. Therefore, the
possibility of workingin overtime could be removed from the model.
However, we choose not to do this, since it would
reduce the computational time and thereby give a false
indication on the computational time ofreal life instances.Besides
choosing the deadline equal to the (best known upper bound the)
minimum makespan,which we denote by Cmax, it can be chosen as a
fraction ofCmax. By letting the deadline be equalto b Cmax, where b
[0, 1], the problem becomes tighter and more irregular capacity
will beneeded. The resulting objective value will indicate the
costs to complete the project earlier. Sincethe problem becomes
tighter with b < 1, we get a better insight in the influence of
the differentparameter settings of the two stage heuristic.
4.2. Parameter setting
In each stage of the heuristic, there are a number of parameters
that need to be set. In the first
stage, these are the fraction a0, the and of the randomized
sampling, and the extend sequencein the improvement. (However,
since we have only single mode instances, can be ignored.) In
thesecond stage, there is the order in which we extend the jobs to
their required duration, and thechoice of the neighbourhood for the
improvement. This subsection concerns the setting of
theseparameters.Since there are far too many different parameter
settings to test them all, we make an assumption.We assume that
optimizing one parameter setting is independent of the setting of
the other param-eters. The quality of a feasible schedule is judged
by the amount of costs that is incurred by hiringand working in
overtime. We are going to determine the parameter setting one
parameter after theother and evaluate the achieved result after the
feasibility step (and not after the neighbourhoodsearch). For each
instance, we generate a number of schedules, each by taking a
random sample to
get a partial schedule, extend it, and turn it into a feasible
schedule. Out of these schedules, weselect the one with minimum
costs to be the solution.For testing the parameter settings, we use
a selection of 10 instances with 30 jobs and 10 instanceswith 120
jobs from the PSPlib. Initially, we use a deadline of 90% of the
best known upper boundto the makespan, i.e., b = 0.9. This way we
are quite sure that the objective value will not equalzero,
allowing us a better measurement of the effect of the parameters.
For these initial tests, weuse largest unscheduled processing time
first in the feasibility step.Starting with the value of , we fix
the fraction a0, the extension sequence and the order in whichwe
make the jobs feasible. Testing different values for , it turns out
that if a small number ofschedules for each instance are generated
large values for outperform small values. However, asthe number of
schedules generated per instance increases, the random search ( =
0) outperforms
-
8/2/2019 Time-Constrained Project Scheduling
13/16
-
8/2/2019 Time-Constrained Project Scheduling
14/16
Guldemond et al.: Time-Constrained Project Scheduling
14
Table 4 Different extend sequences, 120 jobs, b = 0.9 and a0 =
0.8.
Extension seq. Average percentage Average percentage Average
costa1, a2, . . . planned after RS planned after extend after
feasibility0.8, 0.9, 1 89.4 93.3 386.9
0.9, 1 89.4 93.8 357.91 89.4 93.6 370.3
89.4 89.4 539.8
Table 5 Quality time trade-off, 120 jobs, b = 0.9.
Strategy Average CT (s) Max CT (s) ObjectiveSingle pass/ No time
limit 3, 700.8 32, 919.4 291.0Single pass/ 10s time limit 84.7
192.6 289.1Multi pass/ No time limit 3, 900.9 33, 385.3 264.1Multi
pass/ 10s time limit 315.8 750.7 265.6
slightly better. Therefore, we choose to use smallest scheduled
fraction first.
The neighbourhood search is the most time consuming part of the
heuristic, since it has to solveseveral ILPs. Therefore, we select
out of the 100 constructed schedules the one with lowest costs,and
do only the neighbourhood search on that schedule. Moreover, for
the neighbourhood search,it is important to keep the running time
low, but still search a large part of the neighbourhood.In each
step a number of jobs are removed from the schedule, the remainder
is fixed before wereinsert the jobs optimally into the schedule. To
do this, we choose a point in time and removeeach job that is
contiguous to it. Due to the concept of overtime we define a job
contiguous totime t if its start time is at most the first regular
time unit after t and its completion time is atleast the last
regular time unit before t. By choosing a single point in time, and
not multiple oreven an interval, we keep the amount of removed jobs
small, and all these jobs are close together.The set of considered
points in time is chosen as the set of completion times of the jobs
in the
schedule. We process these points in an increasing order. Always
when an improvement occurs, wereplace the current schedule by the
new schedule. We do not recalculate the set of time points tobe
considered. One option is to go through the schedule only once (a
single pass); another option isto go through the schedule several
times (a multi pass). If we do a multi pass, we use in each passthe
new completion times, and stop if the last pass does not improve
the schedule. From our tests,we have seen that it can take a long
time to determine the optimal placements of the removed jobs,i.e.,
solve the ILP. We can restrict the computational time spent on one
reinsertion by using timelimits. If we reach such a time limit, we
use the best found reinsertion of the removed jobs (this canbe the
placement we had before, so we are guaranteed to have a solution
that is at least as goodas before). Table 5 displays the quality
against time trade-off. (CT(s) stands for computationaltime in
seconds.) Multi pass gives higher quality solutions at a price of
larger computational times;
single pass with time limit (we used a 10 second time limit)
gives a solution very fast, but might beof low quality. From the
second and third column in Table 5, we see that there are a few
instanceswith very large computational time. The test results also
show that there are only a few instanceswhere the time limit of 10
seconds is reached. Therefore, it pays to limit the computational
timespent on one reinsertion. Comparing the values in Tables 4 and
5, we see that the neighbourhoodsearch reduces the objective value
by 20% to 25%.From this subsection, we conclude that each step in
the presented method has its contribution tofinding a good
schedule, and that it is a very flexible method. Depending on the
purpose of use,not only the parameters can be chosen appropriately,
but there is also the choice in the qualityagainst time trade-off,
and on which part of the method to spend the most computational
effort.
-
8/2/2019 Time-Constrained Project Scheduling
15/16
Guldemond et al.: Time-Constrained Project Scheduling
15
Table 6 Summery of the results.
b=1.0 b=0.9Work Maximum Average Objective # with Maximum Average
Objective
Jobs Instances Content CT(s) CT(s) value cost=0 CT(s) CT(s)
value30 480 2,310.7 26.1 2.9 3.2 294 55.1 4.5 58.660 480 4,562.9
241.7 17.2 13.4 276 303.4 24.7 124.490 480 6,812.2 932.7 53.0 22.6
282 845.3 73.9 180.8
120 600 9,073.5 2,163.4 308.3 72.4 75 2,798.2 362.2 326.6
4.3. Computational Results
In the previous subsection, we have used only a small number of
instances to determine the choicesfor the parameters of the two
stage approach. In this subsection, we present a summary of
thecomputational results for a large set of instances. We have used
all single mode instances fromthe PSPlib, and have set the
algorithm as discussed in the previous subsection with a multi
pass,10 second time limited, neighbourhood search. For each
instance, we construct a schedule witha deadline on 100% and 90% of
Cmax. Table 6 summarizes the test results. The
computationalexperiments were performed on a computer with a Intel
Centrino processor running at 2.0 GHz.
We used Delphi 7 to code the algorithm and CPLEX 9.1 to solve
the ILPs. The details of thecomputational tests can be found on our
website Guldemond et al. (2006).If we set the upper bound equal to
Cmax, we see that our method solves about 60% of the instanceswith
zero cost for the 30, 60, and 90 job instances, but only 13% of the
120 job instances. The 30,60, and 90 job instances are generated
with similar characteristics, whereas the 120 job instanceshave a
relative lower resource availability and are therefore tighter and
more difficult. The averageobjective value, the amount of used
irregular capacity, is only a small fraction of the total
workcontent. In the solutions of the instances with 30 jobs, on
average, 0.14% of the required capacityis satisfied with irregular
capacity. This percentage goes up to 0.33% for the instances with
90 jobs.For the tighter 120 job instances, the percentage of work
done with irregular capacity is 0 .80%.These percentages are very
low, so the two stage heuristic gives high quality
schedules.Setting the deadline to 90% ofCmax increases the
objective value, and we cannot verify whether ornot optimal
schedules are found. The 10% reduction of the time horizon results
in schedules thathave only 2.5% of the total work content in
irregular capacity for the 30 job instances, and up to3.5% for the
120 job instances. So completing a project 10% earlier does not
have to be too costly.The computational time grows as the number of
activities grows, but the relative resource avail-ability seems
more important. The instances that have a low resource availability
require morecomputational time than instances with high
availability. The instances that require a lot of com-putational
time are exactly those for which the corresponding RCPSP instances
are also difficultand where the best found makespan is often not
proven to be optimal.
5. Conclusions
In this paper, a first approach for solving the TCPSP with
hiring and working in overtime ispresented. The developed two stage
heuristic first schedules fractions of jobs and then extends
the
jobs in the second stage to obtain a feasible schedule. By first
scheduling only a fraction of eachjob, the shifting of problematic
situations is prevented, keeping them small.Although there are no
benchmark instances for the TCPSP, we were able to convert
benchmarkinstances from the RCPSP and make a comparison. It turned
out that a large amount of theinstances are solved to optimality.
Decreasing the deadline of a project by 10% results in
schedulesthat have far less than 10% smaller percentage of the work
done with irregular capacity. Theschedules generated by the two
stage heuristic are of high quality. The computational tests
alsoshow that there is a lot of flexibility in our method. The
flexibility is not only due to the parameter
-
8/2/2019 Time-Constrained Project Scheduling
16/16
Guldemond et al.: Time-Constrained Project Scheduling
16
setting, but also due to the possibility to choose where to
spend the computational effort. Therefore,we believe this method is
very suited for practical use.
AcknowledgmentsPart of this research has been funded by the
Dutch BSIK/BRICKS project.
References
Deckro, R.F., J.E. Herbert. 1989. Resource constrained project
crashing. OMEGA International Journal ofManagement Science 17
6979.
Demeulemeester, E., W. Herroelen. 1997. New benchmark results
for the resource-constrained projectscheduling problem. Management
Science 43 14851492.
Gademann, N., M. Schutten. 2005. Linear-programming-based
heuristics for project capacity planning. IIETransactions 37
153165.
Guldemond, T.A., J.L. Hurink, J.J. Paulus, J.M.J. Schutten.
2006. Time-constrained project scheduling;
details of the computational tests.
http://tcpsp.ewi.utwente.nl/.
Herroelen, W., B. De Reyck, E. Demeulemeester. 1998.
Resource-constrained project scheduling: a surveyof recent
developments. Computers and Operations Research 25 279302.
Kis, T. 2005. A branch-and-cut algorithm for scheduling of
projects with variable intensity activities. Math-ematical
Programming 103 515539.
Kolisch, R. 1995. Project Scheduling under Resource Constraints
. Physica-Verslag.
Kolisch, R., A. Drexl. 1996. Adaptive search for solving hard
project scheduling problems. Naval ResearchLogistics 43 2340.
Kolisch, R., S. Hartmann. 1999. Heuristic algorithms for solving
the resource-constrained project schedulingproblem: Classification
and computational analysis. J. Weglarz, ed., Handbook on Recent
Advances inProject Scheduling. Kluwer, 197212.
Kolisch, R., R. Padman. 2001. An integrated survey of
deterministic project scheduling. Omega 29 249272.
Kolisch, R., A. Sprecher. 1997a. Project scheduling library -
PSPlib. http://129.187.106.231/psplib/.
Kolisch, R., A. Sprecher. 1997b. PSPLIB a project scheduling
problem library. European Journal of Opera-tional Research 96
205216.
Kolisch, R., A. Sprecher, A. Drexl. 1995. Characterization and
generation of a general class of resource-constrained project
scheduling problems. Management Science 41.
Li, R.K-Y, R.J. Willis. 1993. Resource constrained scheduling
within fixed project durations. The journalof the operational
research society 44 7180.
Neumann, K., C. Schwindt, J. Zimmermann. 2002. Project
Scheduling with Time Windows and ScarceResources . Lecture notes in
economics and mathematical systems (508), Springer.
Palpant, M., C. Artigues, P. Michelon. 2004. LSSPER: Solving the
resource-constrained project schedulingproblem with large
neighbourhood search. Annals of Operations Research 131 237257.