Embed Size (px)
Citation preview

Research ArticleTime and Covariance Threshold Triggered OptimalUncooperative Rendezvous Using Angles-Only Navigation
Yue You1 Hua Wang1 Christophe Paccolat2 Volker Gass2
Jean-Philippe Thiran3 and Jiu Ren Li4
1The College of Aerospace Science and Engineering National University of Defense Technology Changsha 410073 China2Swiss Space Center Ecole Polytechnique Federale de Lausanne 1015 Lausanne Switzerland3Signal Processing Lab (LTS5) Ecole Polytechnique Federale de Lausanne 1015 Lausanne Switzerland4The Manned Space Technology System Center Beijing 100094 China
Correspondence should be addressed to Yue You youyue nudt126com
Received 2 April 2016 Accepted 13 November 2016 Published 24 January 2017
Academic Editor Paul Williams
Copyright copy 2017 Yue You et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A time and covariance threshold triggered optimalmaneuver planningmethod is proposed for orbital rendezvous using angles-onlynavigation (AON) In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute the relative state estimations from a low-volumemass power saving and low-cost opticalinfrared camerarsquos observationsMulti-impulsiveHill guidance law is employed in closed-loop linear covariance analysismodel based on which the quantitative relative position robustness and relative velocity robustness index are defined By balancingfuel consumption relative position robustness and relative velocity robustness we developed a time and covariance thresholdtriggered two-level optimal maneuver planning method showing how these results correlate to past methods and missions andhow they could potentially influence future ones Numerical simulation proved that it is feasible to control the spacecraft witha two-line element- (TLE-) level uncertain 346 of range initial relative state to a 100m v-bar relative station keeping point atwhere the trajectory dispersion reduces to 35 of range under a 30 data gap per revolution on account of the eclipse Comparingwith the traditional time triggered maneuver planning method the final relative position accuracy is improved by one order andthe relative trajectory robustness and collision probability are obviously improved and reduced respectively
1 Introduction
There are hundreds of thousands of debris in Earthrsquos orbitwhile the biggest are tracked through ground radar thelarge majority of pieces remain invisible The 2009 colli-sion between Iridium 33 and Kosmos-2251 destroyed anactive satellite worth tens of millions of dollars [1] There isinternational recognition that 5ndash10 pieces of the currentlyexisting large debris should be removed each year by 2020ESArsquos CleanSpace program [2] is targeted at developing thesecapabilities with the specific target of EnviSat an 8-tonsatellite that poses a high risk of a catastrophic collisionCleanSpace One (CSO) is EPFLrsquos hugely ambitious responseto the problem of orbital debris [3] The most capablenanosatellite ever built CSO will autonomously interceptcapture and deorbit a targeted object EPFLrsquos own ldquoSwiss
Cuberdquo a 1 kg satellite launched in 2009 The disruptive tech-nologies developed and demonstrated through this projectwill form the baseline for the upcoming active debris removal(ADR) efforts in Switzerland and abroad The technologieswill also serve for other uncooperative rendezvous missionsuch as on-orbit servicing and inspectionmission potentiallyleading to the creation of autonomous orbital inspection andrepair drones
The practice of single-opticalinfrared camera based onAON provides a low-volumemass power saving and low-cost solution for the nanosatellite in ADR For these reasonsautonomous vehicles using AON are currently an activearea of research [4ndash14] The growing interest in vision-basedautonomous rendezvous and docking has produced a seriesof experimental spacecraft in an attempt to develop ren-dezvous and proximity operations technology that would be
HindawiInternational Journal of Aerospace EngineeringVolume 2017 Article ID 5451908 10 pageshttpsdoiorg10115520175451908
2 International Journal of Aerospace Engineering
more appropriate for small satellite PRISMA [15] is the onlyin-orbit test bed of angles-only navigation OHB Sweden [16]CNES [17] and DLR [18] imitated uncooperative rendezvoususing AON separately but the uncertainty is accuracy knownwith GPS and RF Besides all the rendezvous processesare ground-in-loop control real AON based autonomousuncooperative rendezvous needs to be further studied
A fundamental challenge faced by AON is the inherentdifficulty in accurately determining the range to target [7] Inrigorous terms the navigation problem becomes observableonly in the presence of orbit control maneuvers whichchange the relative orbit geometry of the observation [11]Woffinden and Geller [6 7] and Grzymisch and Fichter [14]separately derived an observability criterion for AON andoptimized a single-pulse maneuver to minimize estimationerror in relative range direction Spurmann [19] proposed thespiraling maneuver approach of AON to cover the transi-tion gap from absolute to relative navigation Jaehwan andHyochoong [20] implemented the observability constraint ateach rendezvous maneuver optimization node in which thecost function was aimed at minimizing fuel consumptiontheir method minimized fuel consumption while ensuringsufficient relative observability during the whole rendezvousmaneuver All the previous researches made observabilityas an optimization cost function or constraint being offlineand open loop [21] But for uncooperative rendezvous espe-cially long-time autonomous mission the modeling errorand control error exists the adjacent maneuvers intervalconstraints and data gap induced by solar eclipse mustbe taken into concern as well [22] Besides observabilitysafety which is related to trajectory dispersion and fuelefficiency since satellites usually have a tight mass budgetshould be tradeoff at the meantime Tang et al [23] andLuo et al [24ndash26] took the navigation and control errorinto consideration and defined the open-loop optimal robustrendezvous planning method making tradeoff between fuelconsumption rendezvous time and trajectory robustnessLi et al [27] furtherly constructed closed-loop multipleobjective optimization problem (MOOP) considering theposition robustness velocity robustness and fuel Both theprevious maneuver planning methods employed the heavycomputational burden physical planning and nondominatedsorting genetic algorithm (NSGA-II) which is not applicablefor onboard considering limit computational resource
In this study the relative rendezvous trajectory is opti-mized for AON between chaser (active satellite or spacerobot) and target (uncooperative satellite or space debris)The main purpose of this paper is to design an onlinerendezvous maneuver planning method which providesbetter observability and robustness for the whole missionperiod The second purpose is to improve fuel consumptionefficiency There is a tradeoff between the relative positionrobustness relative velocity robustness and fuel consump-tion
The remainder of the paper is organized as followsProblem Formulation defines the problem by addressing thebasics of relative dynamic and optical navigation Closed-Loop Linear Covariance Analysis introduces the analyticallinear covariance method to quantify the robustness measure
for closed-loop relative trajectory dispersion In OptimalManeuver Planning a rendezvous maneuver design strategyis proposed tominimize fuel consumptionwhile seeking highposition and velocity robustness Using the proposed strategya numerical optimization technique is implemented to designthe rendezvous trajectory The designed trajectory is verifiedby performing Monte Carlo simulation Conclusion presentsconcluding remarks for this study
2 Problem Formulation
21 Dynamic Modeling The origin of a rotating LVLH (LocalVertical Local Horizontal) reference frame (119874119905 minus119909119910119911) whichis used for relative motion description is collocated with thedebris cm (cm is short for center of mass) The relativeposition and velocity of the chaser cm with respect to thetarget cm in the LVLH coordinates are denoted by r andk respectively The relative motion equations for generalelliptical orbits are the well-known Tschauner-Hempel (TH)equations [28] whose homogeneous solution is known as theYamanaka-Ankersen state transition matrix [29]
Φ (119905 1199050) = [ Φ119903119903 (119905 1199050) Φ119903V (119905 1199050)ΦV119903 (119905 1199050) ΦVV (119905 1199050) ]= Φ (119891)Φminus1 (1198910) (1)
where the respective expressions of Φminus1(1198910) and Φ(119891) are asfollows
Φminus1 (1198910) = 11205822
sdot[[[[[[[[[[[[[[[
minus3119904119896 + 11989021198962 119888 minus 2119890 0 minus119904119896 + 1119896 0 0minus3 (119890 + 119888119896) minus119904 0 minus(119888119896 + 1119896 + 119890) 0 03119896 minus 1205822 119890119904 0 1198962 0 0minus3119890119904119896 + 11198962 minus2 + 119890119888 1205822 minus119890119904119896 + 1119896 0 00 0 0 0 1205822119888 minus12058221199040 0 0 0 1205822119904 1205822119888
]]]]]]]]]]]]]]]
Φ (119891)
=[[[[[[[[[[[[[
119904 119888 2 minus 3119890119904119868 0 0 01199041015840 1198881015840 minus3119890 (1199041015840119868 + 1199041198962 ) 0 0 0
119888 (1 + 1119896) minus119904 (1 + 1119896) minus31198962119868 1 0 0minus2119904 119890 minus 2119888 minus3 (1 minus 2119890119904119868) 0 0 00 0 0 0 119888 1199040 0 0 0 minus119904 119888
]]]]]]]]]]]]]
(2)
with 119896 = 1 + 119890 cos119891 119888 = 119896 cos119891 119904 = 119896 sin119891 119868 =int1198911198910(11198962)d119891 = (1205832ℎ3)(119905 minus 1199050) and 120582 = radic1 minus 1198902 for shorthand
notation In addition 119890 is the eccentricity of the target orbit119891 is the true anomaly 120583 is the gravitational constant of Earthand ℎ is the norm of targetrsquos angular momentum Here 1198881015840 and1199041015840 indicate the first derivatives with respect to 119891 respectively
International Journal of Aerospace Engineering 3
These solutions can be written in discrete form forimpulsive input Δk119896 as
x119905 = Φ (119905 1199050) x0 + 120575 (119905119896) Δk119896 (3)
where x0 = [r0 k0]119879 and x119905 = [r119905 k119905]119879 are chaserrsquos relativestates at initial moment 1199050 and time 119905 respectively 120575(119905119896) is theDirac function
22 Camera Observation Modeling The camera measure-ment frame (119874119898 minus 119909119898119910119898119911119898) is assumed to be aligned withthe focal plane of the camera Its orientation with respectto the chaser body frame is assumed to be known andconstant The pixel location of the debris cm is used toform an line of sight (LOS) vector from the debris cm tothe camera which is expressed in the camera frame anddenoted by l = [119909119898 119910119898 119911119898]119879 as shown in Figure 1 Becausethe transformation from LVLH to the camera measurementframe can be calculated using knowledge of inertial attitudeposition and velocity the LOSmeasurement expressed in theLVLH frame can be used to formulate the anglebearing-onlymeasurement equation providing the measurement angles tothe debris which is explicitly written as follows
Z = [120576120579] = h (x)
= [[[[[[[arctan(119909radic1199092 + 1199102 + 119911 (120588119905 minus 119911)119909 (120588119905 minus 119911) minus 119911radic1199092 + 1199102)
arctan( minus119910radic1199092 + 1199112)]]]]]]] (4)
where 120576 and 120579 are the respective elevation and azimuthmeasurement angles 120588119905 is the average radius of the debriscircular motion
The measurement sensitive matrix H can be furtherachieved by differentiating (4) with respect to state x that is
ℎ11 = 119909 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus1199111199092 + 1199112
ℎ12 = 119910 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] ℎ13 = 1199092 + 1199102radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus
1199091199092 + 1199112 ℎ21 = 119909119910radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ22 = minus (1199092 + 1199112)radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ23 = 119910119911radic1199092 + 1199112 (1199092 + 1199102 + 1199112)
(5)
Oc
Ot
rc
rt
x
y
z
r
rct
rcm
120576
120579 lxmym
zm
Om
Figure 1 Relative observation geometry
23 Angles-Only Navigation SRUKF [30ndash35] is employedas measurements filtering scheme it utilizes a deterministicldquosamplingrdquo approach to calculate mean and covariance termsof the relative state 2119871 + 1 (119871 is the state dimension) sigmapoints are propagated through the true nonlinearity withoutapproximation and then a weighted mean and covarianceare taken This approach results in approximations that areaccurate to the third order (Taylor series expansion) forGaussian inputs for all nonlinearities For non-Gaussianinputs approximations are accurate to at least the secondorder [31] In contrast the linearization approach of the EKFresults only in first-order accuracy
The implementation for AON is deduced as follows
Initialization
x0 = E [x0] S0 = chol E [(x0 minus x0) (x0 minus x0)119879] (6)
where cholsdot stands for the Cholesky decompositionFor 119896 isin 1 infin calculate the sigma points
120594119896minus1 = [x119896minus1 x119896minus1 + 120578S119896 x119896minus1 minus 120578S119896] (7)
Time Update
119896 = f (119896minus1 u119896minus1) + w119896minus1xminus119896 = 2119871sum119894=0
119882119898119894 119894119896Sminus119896 = qr [radic1198821198881 (12119871119896 minus xminus119896) radicQ119896minus1] Sminus119896 = cholupdate Sminus119896 0119896 minus xminus119896 1198821198880 Z119896 = h (119896) + k119896minus1z119896 = 2119871sum119894=0
119882119898119894 Z119894119896
(8)
4 International Journal of Aerospace Engineering
we use the shorthand notation qrsdot to denote aQRdecompo-sition of amatrix and cholupdatesdot to denote Cholesky factorupdating
Measurement Update
Szk = qr [radic1198821198881 (Z12119871119896 minus z119896)] radicR119896minus1 Szk = cholupdate Szk Z0119896 minus z1198961198821198880
Px119896 z119896 = 2119871sum119894=0
119882119888119894 [119894119896 minus xminus119896] [Z119894119896 minus z119896]119879 K119896 = (Px119896 z119896S119879zk)
Szk
x119896 = xminus119896 + K119896 (z119896 minus z119896) U = K119896Szk Szk = cholupdate Szk U minus1
(9)
where 119882119894 is a set of scalar weights119882119898119894 is the mean weightand 119882119888119894 is the covariance weight which are calculated asfollows
1198821198980 = 120582(120582 + 119871) 1198821198880 = 120582(120582 + 119871) + (1 minus 1205722 + 120573) 119882119898119894 = 119882119888119894 = 12 (119871 + 120582) 119894 = 1 2119871
(10)
where 120582 = 119871(1205722 minus 1) and 120578 = radic(119871 + 120582) The constant120572 determines the spread of the sigma points around x andis usually set to 10minus4 le 120572 le 1 120573 is used to incorporateprior knowledge of the distribution of x (for Gaussiandistributions 120573 = 2 is optimal) Also note that we definethe linear algebra operation of adding a column vector to amatrix that is A plusmn u as the addition of the vector to eachcolumn of the matrix
Furthermore unlike the EKF no explicit derivatives (ieJacobians orHessians) need to be calculated SRUKF employsthree powerful linear algebra techniquesmdashQR decompositionCholesky factor updating and efficient least squares It directlypropagates the Cholesky factor S (the lower triangularmatrixgiven by SS119879 = P) thereby avoiding the need to refactorat each time step The computational complexity of UKFSRUKF and EKF is of the same order (ie 119874(1198713)) for stateestimation however SRUKF is approximately 20 fasterthan UKF and approximately 10 faster than EKF [33]
3 Closed-Loop Linear Covariance Analysis
Linear covariance analysis method [36 37] is employedto deduce an analytical closed-loop control error analysismodel in this paper In order to give a clear mathematical
description the real estimated and nominal relative states arenoted as x x and x respectively We define an augmentederror state vector X consisting of the true dispersions 120575x =x minus x and navigated dispersions 120575x = x minus x as follows
X = [120575x120575x] (11)
The covariance of X isΩ = 119864[XX119879] and initialized as
Ω0 = [ P0 06times606times6 P0
] (12)
where P0 is the a priori covariance matrix of true trajectorydispersion and P0 is the a priori covariance matrix ofnavigated dispersions
The complete closed-loop control process of autonomousrendezvous includes the following three sections they aretime propagatemeasure update and control correct which aredetailedly deduced in this section
31 Time Propagate For 119896 isin 1 infin the augmented statevector and its covariance are propagated as follows
Xminus119896 = Ψ119896|119896minus1X+119896minus1Ω119896|119896minus1 = Ψ119896|119896minus1Ω+119888119896minus1Ψ119879119896|119896minus1 +W119896minus1Q119896minus1W119879119896minus1 (13)
where W119896minus1 = [ I6times606times6 ] and Ψ119896|119896minus1 is the augmented statetransfer matrix which is defined as
Ψ119896|119896minus1 = [ Φ (119905119896 119905119896minus1) 06times606times6 Φ (119905119896 119905119896minus1) ] (14)
32Measure Update Theupdating of augmented state vectorand covariance due to observation is as follows
Xminus119896 = Xminus119896|119896minus1 + K119896 (Z119896 minusH119896Xminus119896|119896minus1) Ωminus119888119896 = C119896Ω119896|119896minus1C
119879119896 + E119896R119896E119879119896 (15)
where the Kalman gain K119896 is achieved in (9)
33 Control Correct Here the common usedmulti-impulsiveHill guidance law is employed for rendezvous maneuvercalculation Usually the total rendezvous time is given as con-stant when the maneuver time array T = [1199051 1199052 sdot sdot sdot 119905119891]119879is settled then the rendezvous maneuver strategy is estab-lished At every maneuver moment 119905119896 the current estimatedrelative state x119896 = [r119896 k119896]119879 and desired final relative statex119891 = [r119891 k119891]119879 are submitted into the following function tocalculate the maneuver vector
Δk119896 = Φminus1119903V (119905119891 119905119896) [r119891 minusΦ119903119903 (119905119891 119905119896) r119896] minus k119896 (16)
To achieve high velocity control accuracy the last controlis applied at terminal that isΔk119891 = minusk119891 (17)
International Journal of Aerospace Engineering 5
Because of maneuver correction the augmented state vectorand the corresponding covariance are revised as follows
X+119896 = (DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I)Xminus119896 Ω+119888119896 = M119896Ω
minus119888119896 M119879119896 + N119896P120575k119896 N119879119896 (18)
whereP120575k119896 is themaneuver execution error covariancematrixthe specific expressions ofM119896 and N119896 are as follows
M119896 = [ Dxminus119888119896
+ I6times6 DΔk119896ΔVxminus119888119896
06times6 DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I6times6 ] N119896 = [I6times606times6
] (19)
where DΔk119896 = (120597d120597k)|Δk119896 Dxminus119888119896
= (120597d120597X)|xminus119888k and ΔVxminus119888119896
=(120597k120597X)|xminus119888k Finally we achieve the complete analytical closed-loop
linear covariance analysis model which is feasible foronboard use to analyze the trajectory dispersion and evaluatethe navigation performance as well as online maneuverplanning
4 Optimal Maneuver Planning
41 Optimization Fitness Function The AON rendezvousmaneuver planning is a typical multiobjective optimizationproblem to make a tradeoff among fuel consumption posi-tion control error and velocity control error the multiob-jective optimization fitness functions should be establishedproperly Using the closed-loop linear covariance built inSection 3 we achieve the extended error covariance at time119905119896
Ω119896 = [[E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]]]
= [[P120575X120575X119896 P120575X120575X119896P120575X120575X119896 P120575X120575X119896
]] (20)
whereP120575X120575X119896 is the trajectory dispersion covariance at time 119905119896which can be expressed as
P120575X120575X119896 = [P119903119903 P119903VPV119903 PVV
] (21)
where P119903119903 is the relative position dispersion and representsthe ellipsoid of trajectory dispersion in geometry Its eigen-values 120590119909 120590119910 and 120590119911 represent the three semimajor axesof the ellipsoid respectively We take the geometric sumof eigenvalues as the robustness metric of relative positiondispersion
120590119903 = radic1205902119909 + 1205902119910 + 1205902119911 (22)
Similarly we defined the robustness metric of relativevelocity dispersion as
120590V = radic1205902 + 1205902 + 1205902 (23)
Finally the multiobjective optimization (MOO) fitnessfunctions are achieved
min 1198911 (Δk) = 119908ΔV 119899sum119894=1
1003816100381610038161003816Δk1198941003816100381610038161003816min 1198912 (120590119903) = 119908120590119903 119873sum
119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896119903
min 1198913 (120590V) = 119908120590V 119873sum119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896V
(24)
The weight factors 119908ΔV 119908120590119903 and 119908120590V are used to maintainthree objectives at same quantity order which improves theoptimization effectiveness As the reasonable quantities ofsum119899119894=1 |Δk119894| sum119873119896=0((119905119896 minus 1199050)(119905119891 minus 1199050))120578120590119896119903 and sum119873119896=0((119905119896 minus1199050)(119905119891 minus 1199050))120578120590119896V are 119874(10) 119874(1000) and 119874(1) respectivelysum119899119894=1 |Δk119894| is recommended to be selected as the referencevalue as a result 119908ΔV = 1 119908120590119903 = 001 and 119908120590V = 10 120578is an integer which tunes the weight of errors at differenttime larger 120578 means bigger weight is addressed on the finalpart of time it improves the dispersion of trajectories thatis improving the trajectory robustness and safety 119873 is apositive integer which tunes the overall trajectory dispersionlarger 119873 means bigger weight is addressed on the trajectorydispersion of the whole mission period
The key performance required for onboard optimalmaneuver planning is proper computational complexity thefeasible solution is to transfer theMOOP to a single-objectiveoptimization problem (SOOP) by making sum of the threefitness functions
119891 = min3sum119894=1
119891119894 if sumΔksumΔk ge 120585 119891 = 119908119891 (25)
It is important to minimize the fuel consumption whileensuring sufficient robustness since a small-size satellite hasa tight mass budget We use a penalty factor 119908 to addressattention to the fuel consumption in fitness function whenthe true fuel consumption departs further than the threshold1 lt 120585 lt 2 from the nominal value the penalty factor 119908 willbe multiplied In order to make this punishment effective 119908should be a positive number at least one order bigger than1 here 119908 = 10 is recommended In this paper the sequencequadratic program (SQP) algorithm is used for optimizationcalculation
42 Time Triggered Maneuver Planning Generally the totalrendezvous duration 119905119891 is given when maneuver time arrayis determined the rendezvous scheme is established that ismaneuvers are triggered by time At eachmaneuver momentthe current estimated relative state is seen as the initial relative
6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
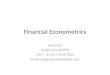
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Aerospace Engineering
more appropriate for small satellite PRISMA [15] is the onlyin-orbit test bed of angles-only navigation OHB Sweden [16]CNES [17] and DLR [18] imitated uncooperative rendezvoususing AON separately but the uncertainty is accuracy knownwith GPS and RF Besides all the rendezvous processesare ground-in-loop control real AON based autonomousuncooperative rendezvous needs to be further studied
A fundamental challenge faced by AON is the inherentdifficulty in accurately determining the range to target [7] Inrigorous terms the navigation problem becomes observableonly in the presence of orbit control maneuvers whichchange the relative orbit geometry of the observation [11]Woffinden and Geller [6 7] and Grzymisch and Fichter [14]separately derived an observability criterion for AON andoptimized a single-pulse maneuver to minimize estimationerror in relative range direction Spurmann [19] proposed thespiraling maneuver approach of AON to cover the transi-tion gap from absolute to relative navigation Jaehwan andHyochoong [20] implemented the observability constraint ateach rendezvous maneuver optimization node in which thecost function was aimed at minimizing fuel consumptiontheir method minimized fuel consumption while ensuringsufficient relative observability during the whole rendezvousmaneuver All the previous researches made observabilityas an optimization cost function or constraint being offlineand open loop [21] But for uncooperative rendezvous espe-cially long-time autonomous mission the modeling errorand control error exists the adjacent maneuvers intervalconstraints and data gap induced by solar eclipse mustbe taken into concern as well [22] Besides observabilitysafety which is related to trajectory dispersion and fuelefficiency since satellites usually have a tight mass budgetshould be tradeoff at the meantime Tang et al [23] andLuo et al [24ndash26] took the navigation and control errorinto consideration and defined the open-loop optimal robustrendezvous planning method making tradeoff between fuelconsumption rendezvous time and trajectory robustnessLi et al [27] furtherly constructed closed-loop multipleobjective optimization problem (MOOP) considering theposition robustness velocity robustness and fuel Both theprevious maneuver planning methods employed the heavycomputational burden physical planning and nondominatedsorting genetic algorithm (NSGA-II) which is not applicablefor onboard considering limit computational resource
In this study the relative rendezvous trajectory is opti-mized for AON between chaser (active satellite or spacerobot) and target (uncooperative satellite or space debris)The main purpose of this paper is to design an onlinerendezvous maneuver planning method which providesbetter observability and robustness for the whole missionperiod The second purpose is to improve fuel consumptionefficiency There is a tradeoff between the relative positionrobustness relative velocity robustness and fuel consump-tion
The remainder of the paper is organized as followsProblem Formulation defines the problem by addressing thebasics of relative dynamic and optical navigation Closed-Loop Linear Covariance Analysis introduces the analyticallinear covariance method to quantify the robustness measure
for closed-loop relative trajectory dispersion In OptimalManeuver Planning a rendezvous maneuver design strategyis proposed tominimize fuel consumptionwhile seeking highposition and velocity robustness Using the proposed strategya numerical optimization technique is implemented to designthe rendezvous trajectory The designed trajectory is verifiedby performing Monte Carlo simulation Conclusion presentsconcluding remarks for this study
2 Problem Formulation
21 Dynamic Modeling The origin of a rotating LVLH (LocalVertical Local Horizontal) reference frame (119874119905 minus119909119910119911) whichis used for relative motion description is collocated with thedebris cm (cm is short for center of mass) The relativeposition and velocity of the chaser cm with respect to thetarget cm in the LVLH coordinates are denoted by r andk respectively The relative motion equations for generalelliptical orbits are the well-known Tschauner-Hempel (TH)equations [28] whose homogeneous solution is known as theYamanaka-Ankersen state transition matrix [29]
Φ (119905 1199050) = [ Φ119903119903 (119905 1199050) Φ119903V (119905 1199050)ΦV119903 (119905 1199050) ΦVV (119905 1199050) ]= Φ (119891)Φminus1 (1198910) (1)
where the respective expressions of Φminus1(1198910) and Φ(119891) are asfollows
Φminus1 (1198910) = 11205822
sdot[[[[[[[[[[[[[[[
minus3119904119896 + 11989021198962 119888 minus 2119890 0 minus119904119896 + 1119896 0 0minus3 (119890 + 119888119896) minus119904 0 minus(119888119896 + 1119896 + 119890) 0 03119896 minus 1205822 119890119904 0 1198962 0 0minus3119890119904119896 + 11198962 minus2 + 119890119888 1205822 minus119890119904119896 + 1119896 0 00 0 0 0 1205822119888 minus12058221199040 0 0 0 1205822119904 1205822119888
]]]]]]]]]]]]]]]
Φ (119891)
=[[[[[[[[[[[[[
119904 119888 2 minus 3119890119904119868 0 0 01199041015840 1198881015840 minus3119890 (1199041015840119868 + 1199041198962 ) 0 0 0
119888 (1 + 1119896) minus119904 (1 + 1119896) minus31198962119868 1 0 0minus2119904 119890 minus 2119888 minus3 (1 minus 2119890119904119868) 0 0 00 0 0 0 119888 1199040 0 0 0 minus119904 119888
]]]]]]]]]]]]]
(2)
with 119896 = 1 + 119890 cos119891 119888 = 119896 cos119891 119904 = 119896 sin119891 119868 =int1198911198910(11198962)d119891 = (1205832ℎ3)(119905 minus 1199050) and 120582 = radic1 minus 1198902 for shorthand
notation In addition 119890 is the eccentricity of the target orbit119891 is the true anomaly 120583 is the gravitational constant of Earthand ℎ is the norm of targetrsquos angular momentum Here 1198881015840 and1199041015840 indicate the first derivatives with respect to 119891 respectively
International Journal of Aerospace Engineering 3
These solutions can be written in discrete form forimpulsive input Δk119896 as
x119905 = Φ (119905 1199050) x0 + 120575 (119905119896) Δk119896 (3)
where x0 = [r0 k0]119879 and x119905 = [r119905 k119905]119879 are chaserrsquos relativestates at initial moment 1199050 and time 119905 respectively 120575(119905119896) is theDirac function
22 Camera Observation Modeling The camera measure-ment frame (119874119898 minus 119909119898119910119898119911119898) is assumed to be aligned withthe focal plane of the camera Its orientation with respectto the chaser body frame is assumed to be known andconstant The pixel location of the debris cm is used toform an line of sight (LOS) vector from the debris cm tothe camera which is expressed in the camera frame anddenoted by l = [119909119898 119910119898 119911119898]119879 as shown in Figure 1 Becausethe transformation from LVLH to the camera measurementframe can be calculated using knowledge of inertial attitudeposition and velocity the LOSmeasurement expressed in theLVLH frame can be used to formulate the anglebearing-onlymeasurement equation providing the measurement angles tothe debris which is explicitly written as follows
Z = [120576120579] = h (x)
= [[[[[[[arctan(119909radic1199092 + 1199102 + 119911 (120588119905 minus 119911)119909 (120588119905 minus 119911) minus 119911radic1199092 + 1199102)
arctan( minus119910radic1199092 + 1199112)]]]]]]] (4)
where 120576 and 120579 are the respective elevation and azimuthmeasurement angles 120588119905 is the average radius of the debriscircular motion
The measurement sensitive matrix H can be furtherachieved by differentiating (4) with respect to state x that is
ℎ11 = 119909 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus1199111199092 + 1199112
ℎ12 = 119910 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] ℎ13 = 1199092 + 1199102radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus
1199091199092 + 1199112 ℎ21 = 119909119910radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ22 = minus (1199092 + 1199112)radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ23 = 119910119911radic1199092 + 1199112 (1199092 + 1199102 + 1199112)
(5)
Oc
Ot
rc
rt
x
y
z
r
rct
rcm
120576
120579 lxmym
zm
Om
Figure 1 Relative observation geometry
23 Angles-Only Navigation SRUKF [30ndash35] is employedas measurements filtering scheme it utilizes a deterministicldquosamplingrdquo approach to calculate mean and covariance termsof the relative state 2119871 + 1 (119871 is the state dimension) sigmapoints are propagated through the true nonlinearity withoutapproximation and then a weighted mean and covarianceare taken This approach results in approximations that areaccurate to the third order (Taylor series expansion) forGaussian inputs for all nonlinearities For non-Gaussianinputs approximations are accurate to at least the secondorder [31] In contrast the linearization approach of the EKFresults only in first-order accuracy
The implementation for AON is deduced as follows
Initialization
x0 = E [x0] S0 = chol E [(x0 minus x0) (x0 minus x0)119879] (6)
where cholsdot stands for the Cholesky decompositionFor 119896 isin 1 infin calculate the sigma points
120594119896minus1 = [x119896minus1 x119896minus1 + 120578S119896 x119896minus1 minus 120578S119896] (7)
Time Update
119896 = f (119896minus1 u119896minus1) + w119896minus1xminus119896 = 2119871sum119894=0
119882119898119894 119894119896Sminus119896 = qr [radic1198821198881 (12119871119896 minus xminus119896) radicQ119896minus1] Sminus119896 = cholupdate Sminus119896 0119896 minus xminus119896 1198821198880 Z119896 = h (119896) + k119896minus1z119896 = 2119871sum119894=0
119882119898119894 Z119894119896
(8)
4 International Journal of Aerospace Engineering
we use the shorthand notation qrsdot to denote aQRdecompo-sition of amatrix and cholupdatesdot to denote Cholesky factorupdating
Measurement Update
Szk = qr [radic1198821198881 (Z12119871119896 minus z119896)] radicR119896minus1 Szk = cholupdate Szk Z0119896 minus z1198961198821198880
Px119896 z119896 = 2119871sum119894=0
119882119888119894 [119894119896 minus xminus119896] [Z119894119896 minus z119896]119879 K119896 = (Px119896 z119896S119879zk)
Szk
x119896 = xminus119896 + K119896 (z119896 minus z119896) U = K119896Szk Szk = cholupdate Szk U minus1
(9)
where 119882119894 is a set of scalar weights119882119898119894 is the mean weightand 119882119888119894 is the covariance weight which are calculated asfollows
1198821198980 = 120582(120582 + 119871) 1198821198880 = 120582(120582 + 119871) + (1 minus 1205722 + 120573) 119882119898119894 = 119882119888119894 = 12 (119871 + 120582) 119894 = 1 2119871
(10)
where 120582 = 119871(1205722 minus 1) and 120578 = radic(119871 + 120582) The constant120572 determines the spread of the sigma points around x andis usually set to 10minus4 le 120572 le 1 120573 is used to incorporateprior knowledge of the distribution of x (for Gaussiandistributions 120573 = 2 is optimal) Also note that we definethe linear algebra operation of adding a column vector to amatrix that is A plusmn u as the addition of the vector to eachcolumn of the matrix
Furthermore unlike the EKF no explicit derivatives (ieJacobians orHessians) need to be calculated SRUKF employsthree powerful linear algebra techniquesmdashQR decompositionCholesky factor updating and efficient least squares It directlypropagates the Cholesky factor S (the lower triangularmatrixgiven by SS119879 = P) thereby avoiding the need to refactorat each time step The computational complexity of UKFSRUKF and EKF is of the same order (ie 119874(1198713)) for stateestimation however SRUKF is approximately 20 fasterthan UKF and approximately 10 faster than EKF [33]
3 Closed-Loop Linear Covariance Analysis
Linear covariance analysis method [36 37] is employedto deduce an analytical closed-loop control error analysismodel in this paper In order to give a clear mathematical
description the real estimated and nominal relative states arenoted as x x and x respectively We define an augmentederror state vector X consisting of the true dispersions 120575x =x minus x and navigated dispersions 120575x = x minus x as follows
X = [120575x120575x] (11)
The covariance of X isΩ = 119864[XX119879] and initialized as
Ω0 = [ P0 06times606times6 P0
] (12)
where P0 is the a priori covariance matrix of true trajectorydispersion and P0 is the a priori covariance matrix ofnavigated dispersions
The complete closed-loop control process of autonomousrendezvous includes the following three sections they aretime propagatemeasure update and control correct which aredetailedly deduced in this section
31 Time Propagate For 119896 isin 1 infin the augmented statevector and its covariance are propagated as follows
Xminus119896 = Ψ119896|119896minus1X+119896minus1Ω119896|119896minus1 = Ψ119896|119896minus1Ω+119888119896minus1Ψ119879119896|119896minus1 +W119896minus1Q119896minus1W119879119896minus1 (13)
where W119896minus1 = [ I6times606times6 ] and Ψ119896|119896minus1 is the augmented statetransfer matrix which is defined as
Ψ119896|119896minus1 = [ Φ (119905119896 119905119896minus1) 06times606times6 Φ (119905119896 119905119896minus1) ] (14)
32Measure Update Theupdating of augmented state vectorand covariance due to observation is as follows
Xminus119896 = Xminus119896|119896minus1 + K119896 (Z119896 minusH119896Xminus119896|119896minus1) Ωminus119888119896 = C119896Ω119896|119896minus1C
119879119896 + E119896R119896E119879119896 (15)
where the Kalman gain K119896 is achieved in (9)
33 Control Correct Here the common usedmulti-impulsiveHill guidance law is employed for rendezvous maneuvercalculation Usually the total rendezvous time is given as con-stant when the maneuver time array T = [1199051 1199052 sdot sdot sdot 119905119891]119879is settled then the rendezvous maneuver strategy is estab-lished At every maneuver moment 119905119896 the current estimatedrelative state x119896 = [r119896 k119896]119879 and desired final relative statex119891 = [r119891 k119891]119879 are submitted into the following function tocalculate the maneuver vector
Δk119896 = Φminus1119903V (119905119891 119905119896) [r119891 minusΦ119903119903 (119905119891 119905119896) r119896] minus k119896 (16)
To achieve high velocity control accuracy the last controlis applied at terminal that isΔk119891 = minusk119891 (17)
International Journal of Aerospace Engineering 5
Because of maneuver correction the augmented state vectorand the corresponding covariance are revised as follows
X+119896 = (DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I)Xminus119896 Ω+119888119896 = M119896Ω
minus119888119896 M119879119896 + N119896P120575k119896 N119879119896 (18)
whereP120575k119896 is themaneuver execution error covariancematrixthe specific expressions ofM119896 and N119896 are as follows
M119896 = [ Dxminus119888119896
+ I6times6 DΔk119896ΔVxminus119888119896
06times6 DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I6times6 ] N119896 = [I6times606times6
] (19)
where DΔk119896 = (120597d120597k)|Δk119896 Dxminus119888119896
= (120597d120597X)|xminus119888k and ΔVxminus119888119896
=(120597k120597X)|xminus119888k Finally we achieve the complete analytical closed-loop
linear covariance analysis model which is feasible foronboard use to analyze the trajectory dispersion and evaluatethe navigation performance as well as online maneuverplanning
4 Optimal Maneuver Planning
41 Optimization Fitness Function The AON rendezvousmaneuver planning is a typical multiobjective optimizationproblem to make a tradeoff among fuel consumption posi-tion control error and velocity control error the multiob-jective optimization fitness functions should be establishedproperly Using the closed-loop linear covariance built inSection 3 we achieve the extended error covariance at time119905119896
Ω119896 = [[E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]]]
= [[P120575X120575X119896 P120575X120575X119896P120575X120575X119896 P120575X120575X119896
]] (20)
whereP120575X120575X119896 is the trajectory dispersion covariance at time 119905119896which can be expressed as
P120575X120575X119896 = [P119903119903 P119903VPV119903 PVV
] (21)
where P119903119903 is the relative position dispersion and representsthe ellipsoid of trajectory dispersion in geometry Its eigen-values 120590119909 120590119910 and 120590119911 represent the three semimajor axesof the ellipsoid respectively We take the geometric sumof eigenvalues as the robustness metric of relative positiondispersion
120590119903 = radic1205902119909 + 1205902119910 + 1205902119911 (22)
Similarly we defined the robustness metric of relativevelocity dispersion as
120590V = radic1205902 + 1205902 + 1205902 (23)
Finally the multiobjective optimization (MOO) fitnessfunctions are achieved
min 1198911 (Δk) = 119908ΔV 119899sum119894=1
1003816100381610038161003816Δk1198941003816100381610038161003816min 1198912 (120590119903) = 119908120590119903 119873sum
119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896119903
min 1198913 (120590V) = 119908120590V 119873sum119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896V
(24)
The weight factors 119908ΔV 119908120590119903 and 119908120590V are used to maintainthree objectives at same quantity order which improves theoptimization effectiveness As the reasonable quantities ofsum119899119894=1 |Δk119894| sum119873119896=0((119905119896 minus 1199050)(119905119891 minus 1199050))120578120590119896119903 and sum119873119896=0((119905119896 minus1199050)(119905119891 minus 1199050))120578120590119896V are 119874(10) 119874(1000) and 119874(1) respectivelysum119899119894=1 |Δk119894| is recommended to be selected as the referencevalue as a result 119908ΔV = 1 119908120590119903 = 001 and 119908120590V = 10 120578is an integer which tunes the weight of errors at differenttime larger 120578 means bigger weight is addressed on the finalpart of time it improves the dispersion of trajectories thatis improving the trajectory robustness and safety 119873 is apositive integer which tunes the overall trajectory dispersionlarger 119873 means bigger weight is addressed on the trajectorydispersion of the whole mission period
The key performance required for onboard optimalmaneuver planning is proper computational complexity thefeasible solution is to transfer theMOOP to a single-objectiveoptimization problem (SOOP) by making sum of the threefitness functions
119891 = min3sum119894=1
119891119894 if sumΔksumΔk ge 120585 119891 = 119908119891 (25)
It is important to minimize the fuel consumption whileensuring sufficient robustness since a small-size satellite hasa tight mass budget We use a penalty factor 119908 to addressattention to the fuel consumption in fitness function whenthe true fuel consumption departs further than the threshold1 lt 120585 lt 2 from the nominal value the penalty factor 119908 willbe multiplied In order to make this punishment effective 119908should be a positive number at least one order bigger than1 here 119908 = 10 is recommended In this paper the sequencequadratic program (SQP) algorithm is used for optimizationcalculation
42 Time Triggered Maneuver Planning Generally the totalrendezvous duration 119905119891 is given when maneuver time arrayis determined the rendezvous scheme is established that ismaneuvers are triggered by time At eachmaneuver momentthe current estimated relative state is seen as the initial relative
6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 3
These solutions can be written in discrete form forimpulsive input Δk119896 as
x119905 = Φ (119905 1199050) x0 + 120575 (119905119896) Δk119896 (3)
where x0 = [r0 k0]119879 and x119905 = [r119905 k119905]119879 are chaserrsquos relativestates at initial moment 1199050 and time 119905 respectively 120575(119905119896) is theDirac function
22 Camera Observation Modeling The camera measure-ment frame (119874119898 minus 119909119898119910119898119911119898) is assumed to be aligned withthe focal plane of the camera Its orientation with respectto the chaser body frame is assumed to be known andconstant The pixel location of the debris cm is used toform an line of sight (LOS) vector from the debris cm tothe camera which is expressed in the camera frame anddenoted by l = [119909119898 119910119898 119911119898]119879 as shown in Figure 1 Becausethe transformation from LVLH to the camera measurementframe can be calculated using knowledge of inertial attitudeposition and velocity the LOSmeasurement expressed in theLVLH frame can be used to formulate the anglebearing-onlymeasurement equation providing the measurement angles tothe debris which is explicitly written as follows
Z = [120576120579] = h (x)
= [[[[[[[arctan(119909radic1199092 + 1199102 + 119911 (120588119905 minus 119911)119909 (120588119905 minus 119911) minus 119911radic1199092 + 1199102)
arctan( minus119910radic1199092 + 1199112)]]]]]]] (4)
where 120576 and 120579 are the respective elevation and azimuthmeasurement angles 120588119905 is the average radius of the debriscircular motion
The measurement sensitive matrix H can be furtherachieved by differentiating (4) with respect to state x that is
ℎ11 = 119909 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus1199111199092 + 1199112
ℎ12 = 119910 (120588119905 minus 119911)radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] ℎ13 = 1199092 + 1199102radic1199092 + 1199102 [1199092 + 1199102 + (120588119905 minus 119911)2] minus
1199091199092 + 1199112 ℎ21 = 119909119910radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ22 = minus (1199092 + 1199112)radic1199092 + 1199112 (1199092 + 1199102 + 1199112) ℎ23 = 119910119911radic1199092 + 1199112 (1199092 + 1199102 + 1199112)
(5)
Oc
Ot
rc
rt
x
y
z
r
rct
rcm
120576
120579 lxmym
zm
Om
Figure 1 Relative observation geometry
23 Angles-Only Navigation SRUKF [30ndash35] is employedas measurements filtering scheme it utilizes a deterministicldquosamplingrdquo approach to calculate mean and covariance termsof the relative state 2119871 + 1 (119871 is the state dimension) sigmapoints are propagated through the true nonlinearity withoutapproximation and then a weighted mean and covarianceare taken This approach results in approximations that areaccurate to the third order (Taylor series expansion) forGaussian inputs for all nonlinearities For non-Gaussianinputs approximations are accurate to at least the secondorder [31] In contrast the linearization approach of the EKFresults only in first-order accuracy
The implementation for AON is deduced as follows
Initialization
x0 = E [x0] S0 = chol E [(x0 minus x0) (x0 minus x0)119879] (6)
where cholsdot stands for the Cholesky decompositionFor 119896 isin 1 infin calculate the sigma points
120594119896minus1 = [x119896minus1 x119896minus1 + 120578S119896 x119896minus1 minus 120578S119896] (7)
Time Update
119896 = f (119896minus1 u119896minus1) + w119896minus1xminus119896 = 2119871sum119894=0
119882119898119894 119894119896Sminus119896 = qr [radic1198821198881 (12119871119896 minus xminus119896) radicQ119896minus1] Sminus119896 = cholupdate Sminus119896 0119896 minus xminus119896 1198821198880 Z119896 = h (119896) + k119896minus1z119896 = 2119871sum119894=0
119882119898119894 Z119894119896
(8)
4 International Journal of Aerospace Engineering
we use the shorthand notation qrsdot to denote aQRdecompo-sition of amatrix and cholupdatesdot to denote Cholesky factorupdating
Measurement Update
Szk = qr [radic1198821198881 (Z12119871119896 minus z119896)] radicR119896minus1 Szk = cholupdate Szk Z0119896 minus z1198961198821198880
Px119896 z119896 = 2119871sum119894=0
119882119888119894 [119894119896 minus xminus119896] [Z119894119896 minus z119896]119879 K119896 = (Px119896 z119896S119879zk)
Szk
x119896 = xminus119896 + K119896 (z119896 minus z119896) U = K119896Szk Szk = cholupdate Szk U minus1
(9)
where 119882119894 is a set of scalar weights119882119898119894 is the mean weightand 119882119888119894 is the covariance weight which are calculated asfollows
1198821198980 = 120582(120582 + 119871) 1198821198880 = 120582(120582 + 119871) + (1 minus 1205722 + 120573) 119882119898119894 = 119882119888119894 = 12 (119871 + 120582) 119894 = 1 2119871
(10)
where 120582 = 119871(1205722 minus 1) and 120578 = radic(119871 + 120582) The constant120572 determines the spread of the sigma points around x andis usually set to 10minus4 le 120572 le 1 120573 is used to incorporateprior knowledge of the distribution of x (for Gaussiandistributions 120573 = 2 is optimal) Also note that we definethe linear algebra operation of adding a column vector to amatrix that is A plusmn u as the addition of the vector to eachcolumn of the matrix
Furthermore unlike the EKF no explicit derivatives (ieJacobians orHessians) need to be calculated SRUKF employsthree powerful linear algebra techniquesmdashQR decompositionCholesky factor updating and efficient least squares It directlypropagates the Cholesky factor S (the lower triangularmatrixgiven by SS119879 = P) thereby avoiding the need to refactorat each time step The computational complexity of UKFSRUKF and EKF is of the same order (ie 119874(1198713)) for stateestimation however SRUKF is approximately 20 fasterthan UKF and approximately 10 faster than EKF [33]
3 Closed-Loop Linear Covariance Analysis
Linear covariance analysis method [36 37] is employedto deduce an analytical closed-loop control error analysismodel in this paper In order to give a clear mathematical
description the real estimated and nominal relative states arenoted as x x and x respectively We define an augmentederror state vector X consisting of the true dispersions 120575x =x minus x and navigated dispersions 120575x = x minus x as follows
X = [120575x120575x] (11)
The covariance of X isΩ = 119864[XX119879] and initialized as
Ω0 = [ P0 06times606times6 P0
] (12)
where P0 is the a priori covariance matrix of true trajectorydispersion and P0 is the a priori covariance matrix ofnavigated dispersions
The complete closed-loop control process of autonomousrendezvous includes the following three sections they aretime propagatemeasure update and control correct which aredetailedly deduced in this section
31 Time Propagate For 119896 isin 1 infin the augmented statevector and its covariance are propagated as follows
Xminus119896 = Ψ119896|119896minus1X+119896minus1Ω119896|119896minus1 = Ψ119896|119896minus1Ω+119888119896minus1Ψ119879119896|119896minus1 +W119896minus1Q119896minus1W119879119896minus1 (13)
where W119896minus1 = [ I6times606times6 ] and Ψ119896|119896minus1 is the augmented statetransfer matrix which is defined as
Ψ119896|119896minus1 = [ Φ (119905119896 119905119896minus1) 06times606times6 Φ (119905119896 119905119896minus1) ] (14)
32Measure Update Theupdating of augmented state vectorand covariance due to observation is as follows
Xminus119896 = Xminus119896|119896minus1 + K119896 (Z119896 minusH119896Xminus119896|119896minus1) Ωminus119888119896 = C119896Ω119896|119896minus1C
119879119896 + E119896R119896E119879119896 (15)
where the Kalman gain K119896 is achieved in (9)
33 Control Correct Here the common usedmulti-impulsiveHill guidance law is employed for rendezvous maneuvercalculation Usually the total rendezvous time is given as con-stant when the maneuver time array T = [1199051 1199052 sdot sdot sdot 119905119891]119879is settled then the rendezvous maneuver strategy is estab-lished At every maneuver moment 119905119896 the current estimatedrelative state x119896 = [r119896 k119896]119879 and desired final relative statex119891 = [r119891 k119891]119879 are submitted into the following function tocalculate the maneuver vector
Δk119896 = Φminus1119903V (119905119891 119905119896) [r119891 minusΦ119903119903 (119905119891 119905119896) r119896] minus k119896 (16)
To achieve high velocity control accuracy the last controlis applied at terminal that isΔk119891 = minusk119891 (17)
International Journal of Aerospace Engineering 5
Because of maneuver correction the augmented state vectorand the corresponding covariance are revised as follows
X+119896 = (DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I)Xminus119896 Ω+119888119896 = M119896Ω
minus119888119896 M119879119896 + N119896P120575k119896 N119879119896 (18)
whereP120575k119896 is themaneuver execution error covariancematrixthe specific expressions ofM119896 and N119896 are as follows
M119896 = [ Dxminus119888119896
+ I6times6 DΔk119896ΔVxminus119888119896
06times6 DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I6times6 ] N119896 = [I6times606times6
] (19)
where DΔk119896 = (120597d120597k)|Δk119896 Dxminus119888119896
= (120597d120597X)|xminus119888k and ΔVxminus119888119896
=(120597k120597X)|xminus119888k Finally we achieve the complete analytical closed-loop
linear covariance analysis model which is feasible foronboard use to analyze the trajectory dispersion and evaluatethe navigation performance as well as online maneuverplanning
4 Optimal Maneuver Planning
41 Optimization Fitness Function The AON rendezvousmaneuver planning is a typical multiobjective optimizationproblem to make a tradeoff among fuel consumption posi-tion control error and velocity control error the multiob-jective optimization fitness functions should be establishedproperly Using the closed-loop linear covariance built inSection 3 we achieve the extended error covariance at time119905119896
Ω119896 = [[E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]]]
= [[P120575X120575X119896 P120575X120575X119896P120575X120575X119896 P120575X120575X119896
]] (20)
whereP120575X120575X119896 is the trajectory dispersion covariance at time 119905119896which can be expressed as
P120575X120575X119896 = [P119903119903 P119903VPV119903 PVV
] (21)
where P119903119903 is the relative position dispersion and representsthe ellipsoid of trajectory dispersion in geometry Its eigen-values 120590119909 120590119910 and 120590119911 represent the three semimajor axesof the ellipsoid respectively We take the geometric sumof eigenvalues as the robustness metric of relative positiondispersion
120590119903 = radic1205902119909 + 1205902119910 + 1205902119911 (22)
Similarly we defined the robustness metric of relativevelocity dispersion as
120590V = radic1205902 + 1205902 + 1205902 (23)
Finally the multiobjective optimization (MOO) fitnessfunctions are achieved
min 1198911 (Δk) = 119908ΔV 119899sum119894=1
1003816100381610038161003816Δk1198941003816100381610038161003816min 1198912 (120590119903) = 119908120590119903 119873sum
119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896119903
min 1198913 (120590V) = 119908120590V 119873sum119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896V
(24)
The weight factors 119908ΔV 119908120590119903 and 119908120590V are used to maintainthree objectives at same quantity order which improves theoptimization effectiveness As the reasonable quantities ofsum119899119894=1 |Δk119894| sum119873119896=0((119905119896 minus 1199050)(119905119891 minus 1199050))120578120590119896119903 and sum119873119896=0((119905119896 minus1199050)(119905119891 minus 1199050))120578120590119896V are 119874(10) 119874(1000) and 119874(1) respectivelysum119899119894=1 |Δk119894| is recommended to be selected as the referencevalue as a result 119908ΔV = 1 119908120590119903 = 001 and 119908120590V = 10 120578is an integer which tunes the weight of errors at differenttime larger 120578 means bigger weight is addressed on the finalpart of time it improves the dispersion of trajectories thatis improving the trajectory robustness and safety 119873 is apositive integer which tunes the overall trajectory dispersionlarger 119873 means bigger weight is addressed on the trajectorydispersion of the whole mission period
The key performance required for onboard optimalmaneuver planning is proper computational complexity thefeasible solution is to transfer theMOOP to a single-objectiveoptimization problem (SOOP) by making sum of the threefitness functions
119891 = min3sum119894=1
119891119894 if sumΔksumΔk ge 120585 119891 = 119908119891 (25)
It is important to minimize the fuel consumption whileensuring sufficient robustness since a small-size satellite hasa tight mass budget We use a penalty factor 119908 to addressattention to the fuel consumption in fitness function whenthe true fuel consumption departs further than the threshold1 lt 120585 lt 2 from the nominal value the penalty factor 119908 willbe multiplied In order to make this punishment effective 119908should be a positive number at least one order bigger than1 here 119908 = 10 is recommended In this paper the sequencequadratic program (SQP) algorithm is used for optimizationcalculation
42 Time Triggered Maneuver Planning Generally the totalrendezvous duration 119905119891 is given when maneuver time arrayis determined the rendezvous scheme is established that ismaneuvers are triggered by time At eachmaneuver momentthe current estimated relative state is seen as the initial relative
6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Journal of Aerospace Engineering
we use the shorthand notation qrsdot to denote aQRdecompo-sition of amatrix and cholupdatesdot to denote Cholesky factorupdating
Measurement Update
Szk = qr [radic1198821198881 (Z12119871119896 minus z119896)] radicR119896minus1 Szk = cholupdate Szk Z0119896 minus z1198961198821198880
Px119896 z119896 = 2119871sum119894=0
119882119888119894 [119894119896 minus xminus119896] [Z119894119896 minus z119896]119879 K119896 = (Px119896 z119896S119879zk)
Szk
x119896 = xminus119896 + K119896 (z119896 minus z119896) U = K119896Szk Szk = cholupdate Szk U minus1
(9)
where 119882119894 is a set of scalar weights119882119898119894 is the mean weightand 119882119888119894 is the covariance weight which are calculated asfollows
1198821198980 = 120582(120582 + 119871) 1198821198880 = 120582(120582 + 119871) + (1 minus 1205722 + 120573) 119882119898119894 = 119882119888119894 = 12 (119871 + 120582) 119894 = 1 2119871
(10)
where 120582 = 119871(1205722 minus 1) and 120578 = radic(119871 + 120582) The constant120572 determines the spread of the sigma points around x andis usually set to 10minus4 le 120572 le 1 120573 is used to incorporateprior knowledge of the distribution of x (for Gaussiandistributions 120573 = 2 is optimal) Also note that we definethe linear algebra operation of adding a column vector to amatrix that is A plusmn u as the addition of the vector to eachcolumn of the matrix
Furthermore unlike the EKF no explicit derivatives (ieJacobians orHessians) need to be calculated SRUKF employsthree powerful linear algebra techniquesmdashQR decompositionCholesky factor updating and efficient least squares It directlypropagates the Cholesky factor S (the lower triangularmatrixgiven by SS119879 = P) thereby avoiding the need to refactorat each time step The computational complexity of UKFSRUKF and EKF is of the same order (ie 119874(1198713)) for stateestimation however SRUKF is approximately 20 fasterthan UKF and approximately 10 faster than EKF [33]
3 Closed-Loop Linear Covariance Analysis
Linear covariance analysis method [36 37] is employedto deduce an analytical closed-loop control error analysismodel in this paper In order to give a clear mathematical
description the real estimated and nominal relative states arenoted as x x and x respectively We define an augmentederror state vector X consisting of the true dispersions 120575x =x minus x and navigated dispersions 120575x = x minus x as follows
X = [120575x120575x] (11)
The covariance of X isΩ = 119864[XX119879] and initialized as
Ω0 = [ P0 06times606times6 P0
] (12)
where P0 is the a priori covariance matrix of true trajectorydispersion and P0 is the a priori covariance matrix ofnavigated dispersions
The complete closed-loop control process of autonomousrendezvous includes the following three sections they aretime propagatemeasure update and control correct which aredetailedly deduced in this section
31 Time Propagate For 119896 isin 1 infin the augmented statevector and its covariance are propagated as follows
Xminus119896 = Ψ119896|119896minus1X+119896minus1Ω119896|119896minus1 = Ψ119896|119896minus1Ω+119888119896minus1Ψ119879119896|119896minus1 +W119896minus1Q119896minus1W119879119896minus1 (13)
where W119896minus1 = [ I6times606times6 ] and Ψ119896|119896minus1 is the augmented statetransfer matrix which is defined as
Ψ119896|119896minus1 = [ Φ (119905119896 119905119896minus1) 06times606times6 Φ (119905119896 119905119896minus1) ] (14)
32Measure Update Theupdating of augmented state vectorand covariance due to observation is as follows
Xminus119896 = Xminus119896|119896minus1 + K119896 (Z119896 minusH119896Xminus119896|119896minus1) Ωminus119888119896 = C119896Ω119896|119896minus1C
119879119896 + E119896R119896E119879119896 (15)
where the Kalman gain K119896 is achieved in (9)
33 Control Correct Here the common usedmulti-impulsiveHill guidance law is employed for rendezvous maneuvercalculation Usually the total rendezvous time is given as con-stant when the maneuver time array T = [1199051 1199052 sdot sdot sdot 119905119891]119879is settled then the rendezvous maneuver strategy is estab-lished At every maneuver moment 119905119896 the current estimatedrelative state x119896 = [r119896 k119896]119879 and desired final relative statex119891 = [r119891 k119891]119879 are submitted into the following function tocalculate the maneuver vector
Δk119896 = Φminus1119903V (119905119891 119905119896) [r119891 minusΦ119903119903 (119905119891 119905119896) r119896] minus k119896 (16)
To achieve high velocity control accuracy the last controlis applied at terminal that isΔk119891 = minusk119891 (17)
International Journal of Aerospace Engineering 5
Because of maneuver correction the augmented state vectorand the corresponding covariance are revised as follows
X+119896 = (DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I)Xminus119896 Ω+119888119896 = M119896Ω
minus119888119896 M119879119896 + N119896P120575k119896 N119879119896 (18)
whereP120575k119896 is themaneuver execution error covariancematrixthe specific expressions ofM119896 and N119896 are as follows
M119896 = [ Dxminus119888119896
+ I6times6 DΔk119896ΔVxminus119888119896
06times6 DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I6times6 ] N119896 = [I6times606times6
] (19)
where DΔk119896 = (120597d120597k)|Δk119896 Dxminus119888119896
= (120597d120597X)|xminus119888k and ΔVxminus119888119896
=(120597k120597X)|xminus119888k Finally we achieve the complete analytical closed-loop
linear covariance analysis model which is feasible foronboard use to analyze the trajectory dispersion and evaluatethe navigation performance as well as online maneuverplanning
4 Optimal Maneuver Planning
41 Optimization Fitness Function The AON rendezvousmaneuver planning is a typical multiobjective optimizationproblem to make a tradeoff among fuel consumption posi-tion control error and velocity control error the multiob-jective optimization fitness functions should be establishedproperly Using the closed-loop linear covariance built inSection 3 we achieve the extended error covariance at time119905119896
Ω119896 = [[E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]]]
= [[P120575X120575X119896 P120575X120575X119896P120575X120575X119896 P120575X120575X119896
]] (20)
whereP120575X120575X119896 is the trajectory dispersion covariance at time 119905119896which can be expressed as
P120575X120575X119896 = [P119903119903 P119903VPV119903 PVV
] (21)
where P119903119903 is the relative position dispersion and representsthe ellipsoid of trajectory dispersion in geometry Its eigen-values 120590119909 120590119910 and 120590119911 represent the three semimajor axesof the ellipsoid respectively We take the geometric sumof eigenvalues as the robustness metric of relative positiondispersion
120590119903 = radic1205902119909 + 1205902119910 + 1205902119911 (22)
Similarly we defined the robustness metric of relativevelocity dispersion as
120590V = radic1205902 + 1205902 + 1205902 (23)
Finally the multiobjective optimization (MOO) fitnessfunctions are achieved
min 1198911 (Δk) = 119908ΔV 119899sum119894=1
1003816100381610038161003816Δk1198941003816100381610038161003816min 1198912 (120590119903) = 119908120590119903 119873sum
119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896119903
min 1198913 (120590V) = 119908120590V 119873sum119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896V
(24)
The weight factors 119908ΔV 119908120590119903 and 119908120590V are used to maintainthree objectives at same quantity order which improves theoptimization effectiveness As the reasonable quantities ofsum119899119894=1 |Δk119894| sum119873119896=0((119905119896 minus 1199050)(119905119891 minus 1199050))120578120590119896119903 and sum119873119896=0((119905119896 minus1199050)(119905119891 minus 1199050))120578120590119896V are 119874(10) 119874(1000) and 119874(1) respectivelysum119899119894=1 |Δk119894| is recommended to be selected as the referencevalue as a result 119908ΔV = 1 119908120590119903 = 001 and 119908120590V = 10 120578is an integer which tunes the weight of errors at differenttime larger 120578 means bigger weight is addressed on the finalpart of time it improves the dispersion of trajectories thatis improving the trajectory robustness and safety 119873 is apositive integer which tunes the overall trajectory dispersionlarger 119873 means bigger weight is addressed on the trajectorydispersion of the whole mission period
The key performance required for onboard optimalmaneuver planning is proper computational complexity thefeasible solution is to transfer theMOOP to a single-objectiveoptimization problem (SOOP) by making sum of the threefitness functions
119891 = min3sum119894=1
119891119894 if sumΔksumΔk ge 120585 119891 = 119908119891 (25)
It is important to minimize the fuel consumption whileensuring sufficient robustness since a small-size satellite hasa tight mass budget We use a penalty factor 119908 to addressattention to the fuel consumption in fitness function whenthe true fuel consumption departs further than the threshold1 lt 120585 lt 2 from the nominal value the penalty factor 119908 willbe multiplied In order to make this punishment effective 119908should be a positive number at least one order bigger than1 here 119908 = 10 is recommended In this paper the sequencequadratic program (SQP) algorithm is used for optimizationcalculation
42 Time Triggered Maneuver Planning Generally the totalrendezvous duration 119905119891 is given when maneuver time arrayis determined the rendezvous scheme is established that ismaneuvers are triggered by time At eachmaneuver momentthe current estimated relative state is seen as the initial relative
6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Aerospace Engineering 5
Because of maneuver correction the augmented state vectorand the corresponding covariance are revised as follows
X+119896 = (DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I)Xminus119896 Ω+119888119896 = M119896Ω
minus119888119896 M119879119896 + N119896P120575k119896 N119879119896 (18)
whereP120575k119896 is themaneuver execution error covariancematrixthe specific expressions ofM119896 and N119896 are as follows
M119896 = [ Dxminus119888119896
+ I6times6 DΔk119896ΔVxminus119888119896
06times6 DΔk119896ΔVxminus119888119896
+Dxminus119888119896
+ I6times6 ] N119896 = [I6times606times6
] (19)
where DΔk119896 = (120597d120597k)|Δk119896 Dxminus119888119896
= (120597d120597X)|xminus119888k and ΔVxminus119888119896
=(120597k120597X)|xminus119888k Finally we achieve the complete analytical closed-loop
linear covariance analysis model which is feasible foronboard use to analyze the trajectory dispersion and evaluatethe navigation performance as well as online maneuverplanning
4 Optimal Maneuver Planning
41 Optimization Fitness Function The AON rendezvousmaneuver planning is a typical multiobjective optimizationproblem to make a tradeoff among fuel consumption posi-tion control error and velocity control error the multiob-jective optimization fitness functions should be establishedproperly Using the closed-loop linear covariance built inSection 3 we achieve the extended error covariance at time119905119896
Ω119896 = [[E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]E [120575X119896120575X119879119896 ] E [120575X119896120575X119879119896 ]]]
= [[P120575X120575X119896 P120575X120575X119896P120575X120575X119896 P120575X120575X119896
]] (20)
whereP120575X120575X119896 is the trajectory dispersion covariance at time 119905119896which can be expressed as
P120575X120575X119896 = [P119903119903 P119903VPV119903 PVV
] (21)
where P119903119903 is the relative position dispersion and representsthe ellipsoid of trajectory dispersion in geometry Its eigen-values 120590119909 120590119910 and 120590119911 represent the three semimajor axesof the ellipsoid respectively We take the geometric sumof eigenvalues as the robustness metric of relative positiondispersion
120590119903 = radic1205902119909 + 1205902119910 + 1205902119911 (22)
Similarly we defined the robustness metric of relativevelocity dispersion as
120590V = radic1205902 + 1205902 + 1205902 (23)
Finally the multiobjective optimization (MOO) fitnessfunctions are achieved
min 1198911 (Δk) = 119908ΔV 119899sum119894=1
1003816100381610038161003816Δk1198941003816100381610038161003816min 1198912 (120590119903) = 119908120590119903 119873sum
119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896119903
min 1198913 (120590V) = 119908120590V 119873sum119896=0
( 119905119896 minus 1199050119905119891 minus 1199050)120578 120590119896V
(24)
The weight factors 119908ΔV 119908120590119903 and 119908120590V are used to maintainthree objectives at same quantity order which improves theoptimization effectiveness As the reasonable quantities ofsum119899119894=1 |Δk119894| sum119873119896=0((119905119896 minus 1199050)(119905119891 minus 1199050))120578120590119896119903 and sum119873119896=0((119905119896 minus1199050)(119905119891 minus 1199050))120578120590119896V are 119874(10) 119874(1000) and 119874(1) respectivelysum119899119894=1 |Δk119894| is recommended to be selected as the referencevalue as a result 119908ΔV = 1 119908120590119903 = 001 and 119908120590V = 10 120578is an integer which tunes the weight of errors at differenttime larger 120578 means bigger weight is addressed on the finalpart of time it improves the dispersion of trajectories thatis improving the trajectory robustness and safety 119873 is apositive integer which tunes the overall trajectory dispersionlarger 119873 means bigger weight is addressed on the trajectorydispersion of the whole mission period
The key performance required for onboard optimalmaneuver planning is proper computational complexity thefeasible solution is to transfer theMOOP to a single-objectiveoptimization problem (SOOP) by making sum of the threefitness functions
119891 = min3sum119894=1
119891119894 if sumΔksumΔk ge 120585 119891 = 119908119891 (25)
It is important to minimize the fuel consumption whileensuring sufficient robustness since a small-size satellite hasa tight mass budget We use a penalty factor 119908 to addressattention to the fuel consumption in fitness function whenthe true fuel consumption departs further than the threshold1 lt 120585 lt 2 from the nominal value the penalty factor 119908 willbe multiplied In order to make this punishment effective 119908should be a positive number at least one order bigger than1 here 119908 = 10 is recommended In this paper the sequencequadratic program (SQP) algorithm is used for optimizationcalculation
42 Time Triggered Maneuver Planning Generally the totalrendezvous duration 119905119891 is given when maneuver time arrayis determined the rendezvous scheme is established that ismaneuvers are triggered by time At eachmaneuver momentthe current estimated relative state is seen as the initial relative
6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 International Journal of Aerospace Engineering
state aiming at the desired relative station multi-impulsiveHill guidance law is usually used Regularly the lastmaneuveris applied at the terminal in order to confirm high relativevelocity accuracy
Spacecraft circling the Earth on a low earth orbit (LEO)experiences a 30 data gap per revolution on account ofthe eclipse For long duration (longer than one orbit period)mission the eclipse should be taken into concerned especiallyfor opticalinfrared camera basedAON scenariosThe eclipsecan be located at any relative time since the rendezvousbeginning time by phasing so here we assume there are 119898observable interval during the whole rendezvous processthat is [(0 119879minus03119879) (119879 2119879minus03119879) ((119898minus1)119879119898119879minus03119879)]all themaneuvers are applied in observable interval and thereis 119899119894 (119894 isin 1 2 119898) maneuvers in the 119894th observableinterval Based on the previous analysis the general timetriggeredmaneuver profile planningmodel ismathematicallydefined as follows
t = [[[[[11990511 11990512 sdot sdot sdot 11990511198991 1199051198981 1199051198982 sdot sdot sdot 119905119898119899119898
]]]]]
1199051198981 ge (119898 minus 1) 119879 + 120591119905119898119899119898 le 119898119879 minus 03119879119905119898119896+1 minus 119905119898119896 ge 120591 119896 isin 1 2 119899119898 minus 1
(26)
where 119879 is the orbit period of target 1198991 119899119898 119898 isinN 119898 is the revolution number since approaching started(119898 = 1) The eclipse occurs between 119905119898119899119898 and 119905119898+11 Toconfirm enough information has been accumulated beforemaneuver the first maneuver is arranged to 120591 minutes afterthe navigation started To confirm all the maneuvers areunder illuminated the total maneuver duration should beshorter than (119898 minus 03)119879 (consecutive illuminated duration)To confirm that enough time has been left for attitudeadjustment and maneuver preparation the time intervalbetween the adjacent maneuvers is longer than 120591
Theoretically long duration maneuver is more fuel effi-cient but under big uncertainty as angles-only navigationthe trajectory disperses very fast so real fuel consumptionspreads over a large area around nominal value More impor-tantly the collision probability rises sharply as the relativerange decreases So the time triggered general handovermaneuver planning method is regularly feasible for ground-in-loop mission short duration mission or well-equippedautonomousmission in which cases the relative state is accu-rately estimated As a result the conflictive fuel consumptioncontrol accuracy and safety challenge angles-only navigation
43 Covariance Threshold Triggered Maneuver Planning Infact the primary cause that time triggered maneuver plan-ning method cannot apply to long duration autonomousrendezvous of AON is that time triggered planning methodgenerates rendezvous scheme in offline mode the real trajec-tory dispersion and navigation error are not used timely
In order to overcome the drawback of time triggeredmaneuver planning method mentioned previously we devel-oped a novel and smarter onboard autonomous maneuverplanning method as shown in Figure 2 This method isdivided into two steps or two levels Firstly use the timetriggered optimal maneuver planning method to achievea basic optimal maneuver profile t = [1199051 1199052 sdot sdot sdot 119905119873]Secondly use the closed-loop linear covariance predicationto judge whether midway amending maneuver should beinserted If the current control error is bigger than thethreshold which can be changed according to the missionrequirement of robustness an amending maneuver will beinserted into the middle of the latest applied maneuver andthe following maneuver the trigger conditions are as follows
radic 3sum119894=1
Ω119896 (119894 119894) gt 120590119903119873 ge 119873minΔ119905119896|119896+1 ge 2120591
(27)
where 120590119903 is the desired threshold of relative position controlerror relative to range according to the one-percent rule[38] which is widely adopted in optical navigation in spacerelative position estimation accuracy should bemaintained atless than one percent of the relative range between satellitesObey the one-percent rule and take the 3120590 situation it issuggested to set 120590119903 = 3 119873min is the appointed alreadyapplied maneuver number if it is too small the maneuvercorrection effect is weak and if it is too big the amendingeffect is weak according to rule of thumb 119873min should bearound half of total nominal maneuver number 120591 is theinterval constraint of adjacent maneuvers left for filteringmaneuver preparation and attitude adjustment according torule of thumb 120591 is usually several minutes
Transfer time fuel consumption passive safety and otherconstraints can be taken into consideration in the basicmaneuver profile using the time triggered optimal maneuverplanning layer however it is beyond the scope of this paperThis paper mainly gives midway amending strategy We usethe covariance threshold triggered method that is a positivesafety method to improve the trajectory dispersion andsafety Every time when the amending maneuver is appliedthe left basic maneuver series will not be reoptimized againalthough it will be better but the onboard computer is hard tobear in current mission when one day the onboard computerbecomes powerful enough this problem will be conquered
44 Numerical Simulation To validate the maneuver plan-ning methods the SwissCube TLE data from March 232016 at UTC 134516 was chosen to serve as the initialinertia state of the target that is 1198860 = 70861213370m 1198900= 00007 1198940 = 17176 rad Ω0 = 50423 rad 1205960 = 59745 radand 1198910 = 031075 rad Both the time and covariance triggeredmaneuver planning method and time triggered maneuverplanning method are separately used to guide the chaserfrom the initial 10 km relative station keeping point to thefinal 100m relative station keeping point Ten waypoints are
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
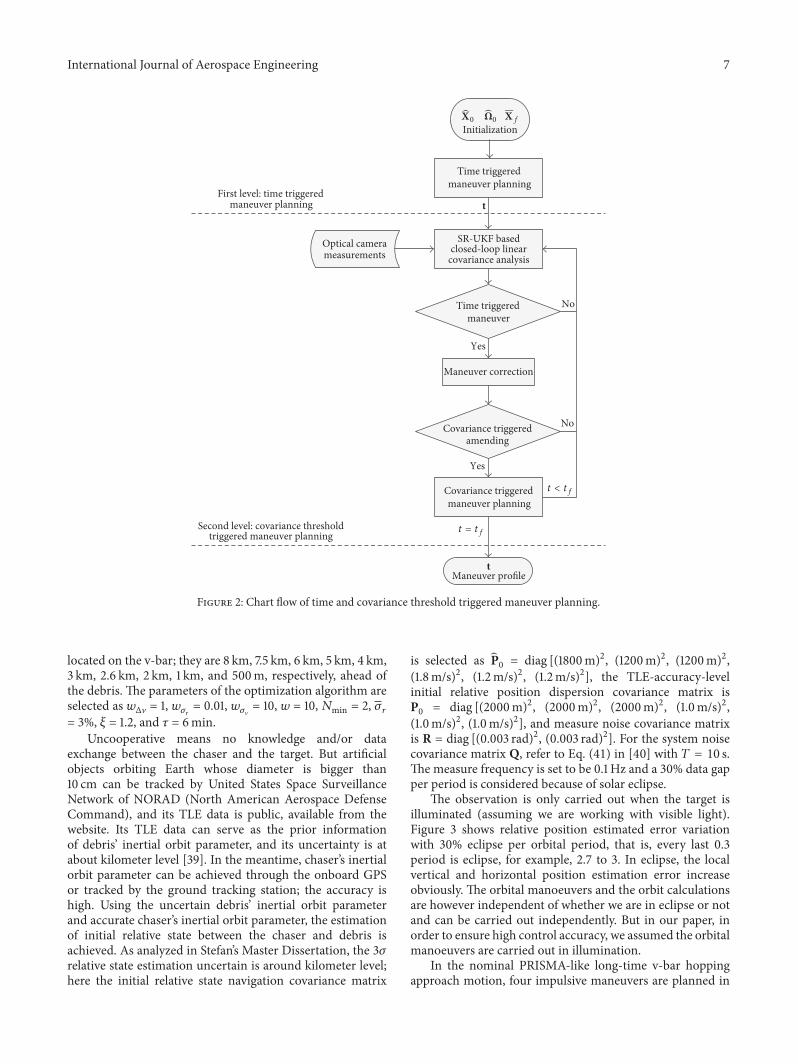
International Journal of Aerospace Engineering 7
Time triggeredmaneuver planning
NoTime triggeredmaneuver
Yes
Initialization
SR-UKF basedclosed-loop linear
covariance analysisOptical camerameasurements
Maneuver profile
Covariance triggeredamending
Maneuver correction
No
Yes
Covariance triggeredmaneuver planning
First level time triggeredmaneuver planning
Second level covariance thresholdtriggered maneuver planning
X0 Ω0 Xf
t
t
t lt tf
t = tf
Figure 2 Chart flow of time and covariance threshold triggered maneuver planning
located on the v-bar they are 8 km 75 km 6 km 5 km 4 km3 km 26 km 2 km 1 km and 500m respectively ahead ofthe debris The parameters of the optimization algorithm areselected as 119908ΔV = 1 119908120590119903 = 001 119908120590V = 10 119908 = 10119873min = 2 120590119903= 3 120585 = 12 and 120591 = 6min
Uncooperative means no knowledge andor dataexchange between the chaser and the target But artificialobjects orbiting Earth whose diameter is bigger than10 cm can be tracked by United States Space SurveillanceNetwork of NORAD (North American Aerospace DefenseCommand) and its TLE data is public available from thewebsite Its TLE data can serve as the prior informationof debrisrsquo inertial orbit parameter and its uncertainty is atabout kilometer level [39] In the meantime chaserrsquos inertialorbit parameter can be achieved through the onboard GPSor tracked by the ground tracking station the accuracy ishigh Using the uncertain debrisrsquo inertial orbit parameterand accurate chaserrsquos inertial orbit parameter the estimationof initial relative state between the chaser and debris isachieved As analyzed in Stefanrsquos Master Dissertation the 3120590relative state estimation uncertain is around kilometer levelhere the initial relative state navigation covariance matrix
is selected as P0 = diag [(1800m)2 (1200m)2 (1200m)2(18ms)2 (12ms)2 (12ms)2] the TLE-accuracy-levelinitial relative position dispersion covariance matrix isP0 = diag [(2000m)2 (2000m)2 (2000m)2 (10ms)2(10ms)2 (10ms)2] and measure noise covariance matrixis R = diag [(0003 rad)2 (0003 rad)2] For the system noisecovariance matrix Q refer to Eq (41) in [40] with 119879 = 10 sThe measure frequency is set to be 01 Hz and a 30 data gapper period is considered because of solar eclipse
The observation is only carried out when the target isilluminated (assuming we are working with visible light)Figure 3 shows relative position estimated error variationwith 30 eclipse per orbital period that is every last 03period is eclipse for example 27 to 3 In eclipse the localvertical and horizontal position estimation error increaseobviously The orbital manoeuvers and the orbit calculationsare however independent of whether we are in eclipse or notand can be carried out independently But in our paper inorder to ensure high control accuracy we assumed the orbitalmanoeuvers are carried out in illumination
In the nominal PRISMA-like long-time v-bar hoppingapproach motion four impulsive maneuvers are planned in
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
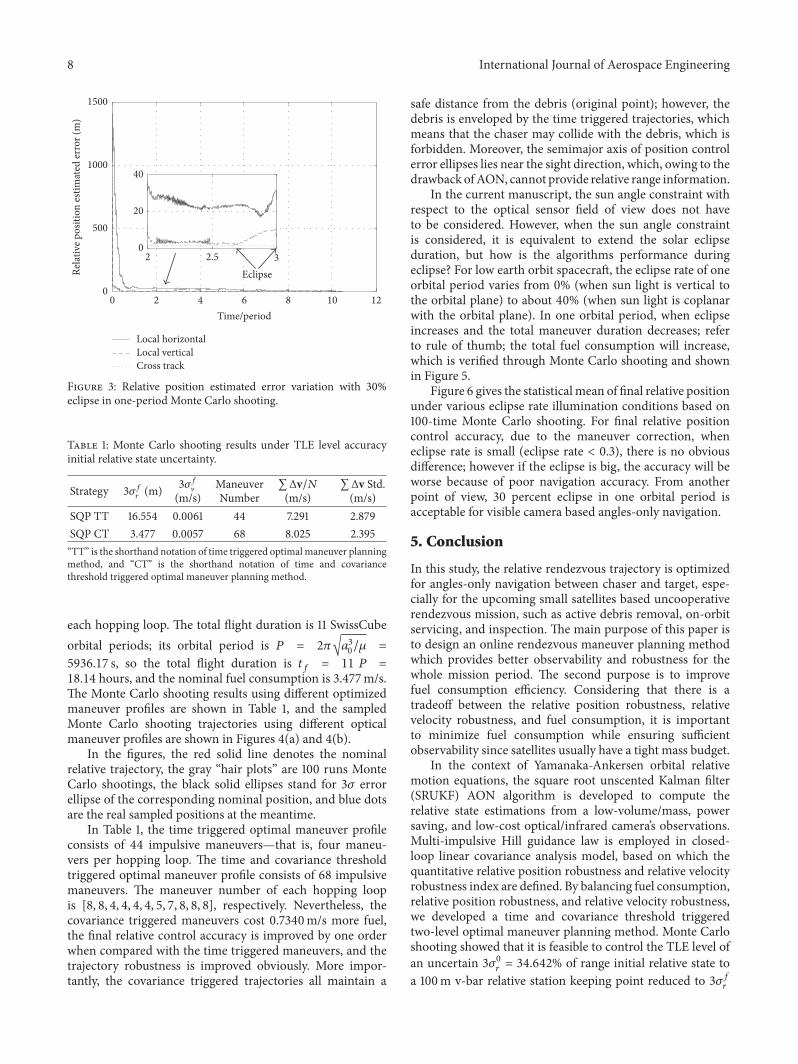
8 International Journal of Aerospace Engineering
Local horizontalLocal verticalCross track
2 25 30
20
40
Eclipse0
500
1000
1500
Relat
ive p
ositi
on es
timat
ed er
ror (
m)
2 4 6 8 10 120Timeperiod
Figure 3 Relative position estimated error variation with 30eclipse in one-period Monte Carlo shooting
Table 1 Monte Carlo shooting results under TLE level accuracyinitial relative state uncertainty
Strategy 3120590119891119903 (m) 3120590119891V(ms)
ManeuverNumber
sumΔk119873(ms)
sumΔk Std(ms)
SQP TT 16554 00061 44 7291 2879SQP CT 3477 00057 68 8025 2395ldquoTTrdquo is the shorthand notation of time triggered optimalmaneuver planningmethod and ldquoCTrdquo is the shorthand notation of time and covariancethreshold triggered optimal maneuver planning method
each hopping loop The total flight duration is 11 SwissCubeorbital periods its orbital period is 119875 = 2120587radic11988630120583 =593617 s so the total flight duration is 119905119891 = 11 119875 =1814 hours and the nominal fuel consumption is 3477msThe Monte Carlo shooting results using different optimizedmaneuver profiles are shown in Table 1 and the sampledMonte Carlo shooting trajectories using different opticalmaneuver profiles are shown in Figures 4(a) and 4(b)
In the figures the red solid line denotes the nominalrelative trajectory the gray ldquohair plotsrdquo are 100 runs MonteCarlo shootings the black solid ellipses stand for 3120590 errorellipse of the corresponding nominal position and blue dotsare the real sampled positions at the meantime
In Table 1 the time triggered optimal maneuver profileconsists of 44 impulsive maneuversmdashthat is four maneu-vers per hopping loop The time and covariance thresholdtriggered optimal maneuver profile consists of 68 impulsivemaneuvers The maneuver number of each hopping loopis [8 8 4 4 4 4 5 7 8 8 8] respectively Nevertheless thecovariance triggered maneuvers cost 07340ms more fuelthe final relative control accuracy is improved by one orderwhen compared with the time triggered maneuvers and thetrajectory robustness is improved obviously More impor-tantly the covariance triggered trajectories all maintain a
safe distance from the debris (original point) however thedebris is enveloped by the time triggered trajectories whichmeans that the chaser may collide with the debris which isforbidden Moreover the semimajor axis of position controlerror ellipses lies near the sight direction which owing to thedrawback ofAON cannot provide relative range information
In the current manuscript the sun angle constraint withrespect to the optical sensor field of view does not haveto be considered However when the sun angle constraintis considered it is equivalent to extend the solar eclipseduration but how is the algorithms performance duringeclipse For low earth orbit spacecraft the eclipse rate of oneorbital period varies from 0 (when sun light is vertical tothe orbital plane) to about 40 (when sun light is coplanarwith the orbital plane) In one orbital period when eclipseincreases and the total maneuver duration decreases referto rule of thumb the total fuel consumption will increasewhich is verified through Monte Carlo shooting and shownin Figure 5
Figure 6 gives the statisticalmean of final relative positionunder various eclipse rate illumination conditions based on100-time Monte Carlo shooting For final relative positioncontrol accuracy due to the maneuver correction wheneclipse rate is small (eclipse rate lt 03) there is no obviousdifference however if the eclipse is big the accuracy will beworse because of poor navigation accuracy From anotherpoint of view 30 percent eclipse in one orbital period isacceptable for visible camera based angles-only navigation
5 Conclusion
In this study the relative rendezvous trajectory is optimizedfor angles-only navigation between chaser and target espe-cially for the upcoming small satellites based uncooperativerendezvous mission such as active debris removal on-orbitservicing and inspection The main purpose of this paper isto design an online rendezvous maneuver planning methodwhich provides better observability and robustness for thewhole mission period The second purpose is to improvefuel consumption efficiency Considering that there is atradeoff between the relative position robustness relativevelocity robustness and fuel consumption it is importantto minimize fuel consumption while ensuring sufficientobservability since satellites usually have a tight mass budget
In the context of Yamanaka-Ankersen orbital relativemotion equations the square root unscented Kalman filter(SRUKF) AON algorithm is developed to compute therelative state estimations from a low-volumemass powersaving and low-cost opticalinfrared camerarsquos observationsMulti-impulsive Hill guidance law is employed in closed-loop linear covariance analysis model based on which thequantitative relative position robustness and relative velocityrobustness index are defined By balancing fuel consumptionrelative position robustness and relative velocity robustnesswe developed a time and covariance threshold triggeredtwo-level optimal maneuver planning method Monte Carloshooting showed that it is feasible to control the TLE level ofan uncertain 31205900119903 = 34642 of range initial relative state toa 100m v-bar relative station keeping point reduced to 3120590119891119903
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
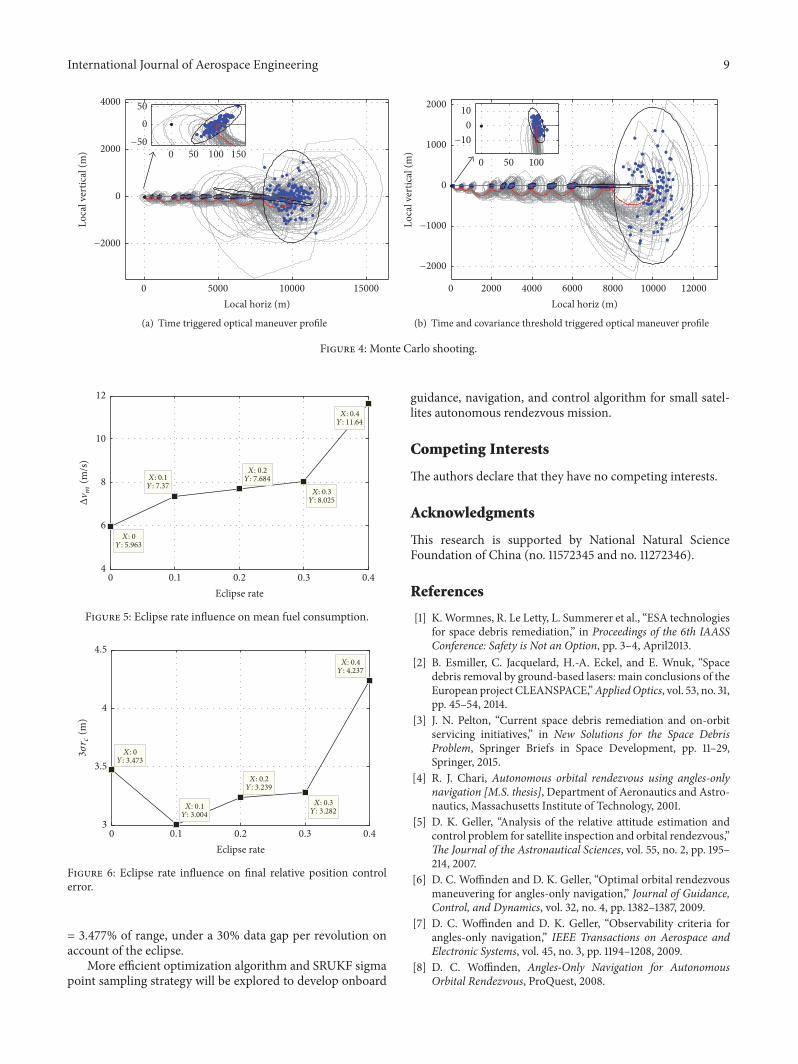
International Journal of Aerospace Engineering 9
0 5000 10000 15000
minus2000
0
2000
4000
Local horiz (m)
Loca
l ver
tical
(m) 0 50 100 150
minus50
050
(a) Time triggered optical maneuver profile
0 2000 4000 6000 8000 10000 12000
minus2000
minus1000
0
1000
2000
Local horiz (m)
Loca
l ver
tical
(m)
0 50 100
minus100
10
(b) Time and covariance threshold triggered optical maneuver profile
Figure 4 Monte Carlo shooting
X 04Y 1164
X 02Y 7684
X 03Y 8025
X 01Y 737
X 0Y 5963
Δ m
(ms
)
4
6
8
10
12
01 02 03 040Eclipse rate
Figure 5 Eclipse rate influence on mean fuel consumption
X 04Y 4237
X 03Y 3282
X 02Y 3239
X 01Y 3004
X 0Y 3473
3
35
4
45
3120590r c
(m)
01 02 03 040Eclipse rate
Figure 6 Eclipse rate influence on final relative position controlerror
= 3477 of range under a 30 data gap per revolution onaccount of the eclipse
More efficient optimization algorithm and SRUKF sigmapoint sampling strategy will be explored to develop onboard
guidance navigation and control algorithm for small satel-lites autonomous rendezvous mission
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This research is supported by National Natural ScienceFoundation of China (no 11572345 and no 11272346)
References
[1] KWormnes R Le Letty L Summerer et al ldquoESA technologiesfor space debris remediationrdquo in Proceedings of the 6th IAASSConference Safety is Not an Option pp 3ndash4 April2013
[2] B Esmiller C Jacquelard H-A Eckel and E Wnuk ldquoSpacedebris removal by ground-based lasers main conclusions of theEuropean project CLEANSPACErdquoAppliedOptics vol 53 no 31pp 45ndash54 2014
[3] J N Pelton ldquoCurrent space debris remediation and on-orbitservicing initiativesrdquo in New Solutions for the Space DebrisProblem Springer Briefs in Space Development pp 11ndash29Springer 2015
[4] R J Chari Autonomous orbital rendezvous using angles-onlynavigation [MS thesis] Department of Aeronautics and Astro-nautics Massachusetts Institute of Technology 2001
[5] D K Geller ldquoAnalysis of the relative attitude estimation andcontrol problem for satellite inspection and orbital rendezvousrdquoThe Journal of the Astronautical Sciences vol 55 no 2 pp 195ndash214 2007
[6] D C Woffinden and D K Geller ldquoOptimal orbital rendezvousmaneuvering for angles-only navigationrdquo Journal of GuidanceControl and Dynamics vol 32 no 4 pp 1382ndash1387 2009
[7] D C Woffinden and D K Geller ldquoObservability criteria forangles-only navigationrdquo IEEE Transactions on Aerospace andElectronic Systems vol 45 no 3 pp 1194ndash1208 2009
[8] D C Woffinden Angles-Only Navigation for AutonomousOrbital Rendezvous ProQuest 2008
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
10 International Journal of Aerospace Engineering
[9] S K Kannan E N Johnson Y Watanabe and R SattigerildquoVision-based tracking of uncooperative targetsrdquo InternationalJournal of Aerospace Engineering vol 2011 Article ID 243268 17pages 2011
[10] I Klein and D K Geller ldquoZero delta-V solution to the angles-only range observability problemduring orbital proximity oper-ationsrdquo in Advances in Estimation Navigation and SpacecraftControl D Choukroun Y Oshman J Thienel and M IdanEds pp 351ndash369 Springer Berlin Germany 2015
[11] K A LeGrand K J DeMars and H J Pernicka ldquoBearings-only initial relative orbit determinationrdquo Journal of GuidanceControl and Dynamics vol 38 no 9 pp 1699ndash1713 2015
[12] J Li H Li G Tang and Y Luo ldquoResearch on the strategyof angles-only relative navigation for autonomous rendezvousrdquoScience China Technological Sciences vol 54 no 7 pp 1865ndash1872 2011
[13] J Tombasco and P Axelrad ldquoAlong-track separation uncer-tainty modeling given space-based optical observationsrdquo Jour-nal of Guidance Control and Dynamics vol 35 no 3 pp 732ndash739 2012
[14] J Grzymisch and W Fichter ldquoAnalytic optimal observabilitymaneuvers for in-orbit bearings-only rendezvousrdquo Journal ofGuidance Control and Dynamics vol 37 no 5 pp 1658ndash16642014
[15] R Noteborn P Bodin R Larsson and C Chasset ldquoFlightresults from the PRISMAoptical line of sight based autonomousrendezvous experimentrdquo in Proceedings of the 4th InternationalConference on Spacecraft Formation FlyingMissions ampTechnolo-gies St-Hubert Canada 2011
[16] P Bodin R Noteborn R Larsson et al ldquoThe prisma formationflying demonstrator overview and conclusions from the nomi-nal missionrdquoAdvances in the Astronautical Sciences vol 144 pp441ndash460 2012
[17] M Delpech J-C Berges T Karlsson and F Malbet ldquoResultsof PRISMAFFIORD extended mission and applicability tofuture formation flying and active debris removal missionsrdquoInternational Journal of Space Science and Engineering vol 1 no4 pp 382ndash409 2013
[18] S DrsquoAmico J-S Ardaens G Gaias H Benninghoff B Schleppand J L Joslashrgensen ldquoNoncooperative rendezvous using angles-only optical navigation system design and flight resultsrdquo Jour-nal of Guidance Control and Dynamics vol 36 no 6 pp 1576ndash1595 2013
[19] J Spurmann ldquoSpiraling approach for angles-only navigationwithin on-orbit servicing missionsrdquo in Advances in AerospaceGuidance Navigation and Control Selected Papers of the 1stCEAS Specialist Conference on Guidance Navigation and Con-trol pp 465ndash472 Springer Berlin Germany 2011
[20] P Jaehwan andBHyochoong ldquoTrajectory design for improvingobservability of angles-only relative navigation between twosatellitesrdquo Journal of the Astronautical Sciences vol 61 no 4 pp391ndash412 2014
[21] WHuang ldquoSolving coplanar power-limited orbit transfer prob-lem by primer vector approximation methodrdquo InternationalJournal of Aerospace Engineering vol 2012 Article ID 480320 9pages 2012
[22] F Simeoni L Casalino A Zavoli and G Colasurdo ldquoIndirectoptimization of satellite deployment into a highly elliptic orbitrdquoInternational Journal of Aerospace Engineering vol 2012 ArticleID 152683 14 pages 2012
[23] G-J Tang Y-Z Luo and H-Y Li ldquoOptimal robust linearizedimpulsive rendezvousrdquo Aerospace Science and Technology vol11 no 7-8 pp 563ndash569 2007
[24] Y Z Luo Z Yang and H N Li ldquoRobust optimizationof nonlinear impulsive rendezvous with uncertaintyrdquo ScienceChina Physics Mechanics and Astronomy vol 57 no 4 pp 731ndash740 2014
[25] Y Z Luo Research on space optimal rendezvous trajectory plan-ning approach [PhD dissertation] College ofAerospace Scienceand Engineering National University of Defense TechnologyChangsha China 2007
[26] Y-Z Luo L-B Liang Z-YNiu andG-J Tang ldquoSafety-optimallinearized impulsive rendezvous with trajectory uncertaintiesrdquoJournal of Aerospace Engineering vol 27 no 6 pp 391ndash412 2014
[27] J R Li H Y Li and G J Tang ldquoOptimal multi-objectivetrajectory design based on close-looped control for autonomousrendezvousrdquo Science China Technological Sciences vol 54 no 11pp 3091ndash3097 2011
[28] K Alfriend S R Vadali P Gurfil et al Spacecraft FormationFlying Dynamics Control and Navigation vol 2 Butterworth-Heinemann 2009
[29] K Yamanaka and F Ankersen ldquoNew state transition matrixfor relative motion on an arbitrary elliptical orbitrdquo Journal ofGuidance Control andDynamics vol 25 no 1 pp 60ndash66 2002
[30] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings of theIEEE American Control Conference vol 3 pp 1628ndash1632 1995
[31] S J Julier and J K Uhlmann ldquoA new extension of the kalmanfilter to nonlinear systemsrdquo in Proceedings of the AeroSenseThe 11th International SymposiumonAerospaceDefence SensingSimirlatiori and Controls Orlando Fla USA 1997
[32] S Julier J Uhlmann and H F Durrant-Whyte ldquoA newmethodfor the nonlinear transformation of means and covariances infilters and estimatorsrdquo IEEE Transactions on Automatic Controlvol 45 no 3 pp 477ndash482 2000
[33] R van der Merwe and E A Wan ldquoThe square-root unscentedKalman filter for state and parameter estimationrdquo inProceedingsof the International Conference on Acoustics Speech and SignalProcessing vol 6 pp 3461ndash3464 Salt Lake City Utah USA2001
[34] B Liu Z Chen X Liu and F Yang ldquoAn efficient nonlinearfilter for spacecraft attitude estimationrdquo International Journalof Aerospace Engineering vol 2014 Article ID 540235 11 pages2014
[35] Y Zhou C Zhang Y Zhang and J Zhang ldquoA new adaptivesquare-root unscented Kalman filter for nonlinear systems withadditive noiserdquo International Journal of Aerospace Engineeringvol 2015 Article ID 381478 9 pages 2015
[36] DM Leonor C Bruno P Alexandre et al ldquoCovariance analysistool for far non-cooperative rendezvousrdquo in Proceedings of theAIAA Guidance Navigation and Control Conference pp 1ndash16Boston Mass USA 2013
[37] D K Geller ldquoLinear covariance techniques for orbital ren-dezvous analysis and autonomous onboard mission planningrdquoJournal of Guidance Control and Dynamics vol 29 no 6 pp1404ndash1414 2006
[38] W Fehse Automated Rendezvous and Docking of SpacecraftCambridge University Press Cambridge UK 2003
[39] J F Stefan Lost in space [MS dissertation] Space EngineeringCenter Ecole Polytechnique Federale de Lausanne LausanneSwitzerland 2014
[40] B H Hari L T Myron and D J Dana-Bashian ldquoGuidanceand relative navigation for autonomous rendezvous in a circularorbitrdquo Journal of Guidance Control and Dynamics vol 25 no3 pp 553ndash562 2002
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of