Embed Size (px)
Citation preview
TIME-05 Workshop, 3-7 October 2005, Zurich 1
Probabilistic Data Probabilistic Data Association Filter for the Association Filter for the fast tracking in ATLAS fast tracking in ATLAS Transition Radiation TrackerTransition Radiation Tracker
Dmitry Emeliyanov, Dmitry Emeliyanov,
Rutherford Appleton Rutherford Appleton
LaboratoryLaboratory
TIME-05 Workshop, 3-7 October 2005, Zurich 2
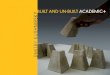
ATLAS Transition Radiation ATLAS Transition Radiation TrackerTracker
Barrel
End-caps
• TRT is a part of the ATLAS Inner Detector• Provides stand-alone electron identification
• Straw drift tubes (4mm) – large number (~36) hits per track• Robust pattern recognition• Input for the Level 2 Trigger
TRT
TIME-05 Workshop, 3-7 October 2005, Zurich 3
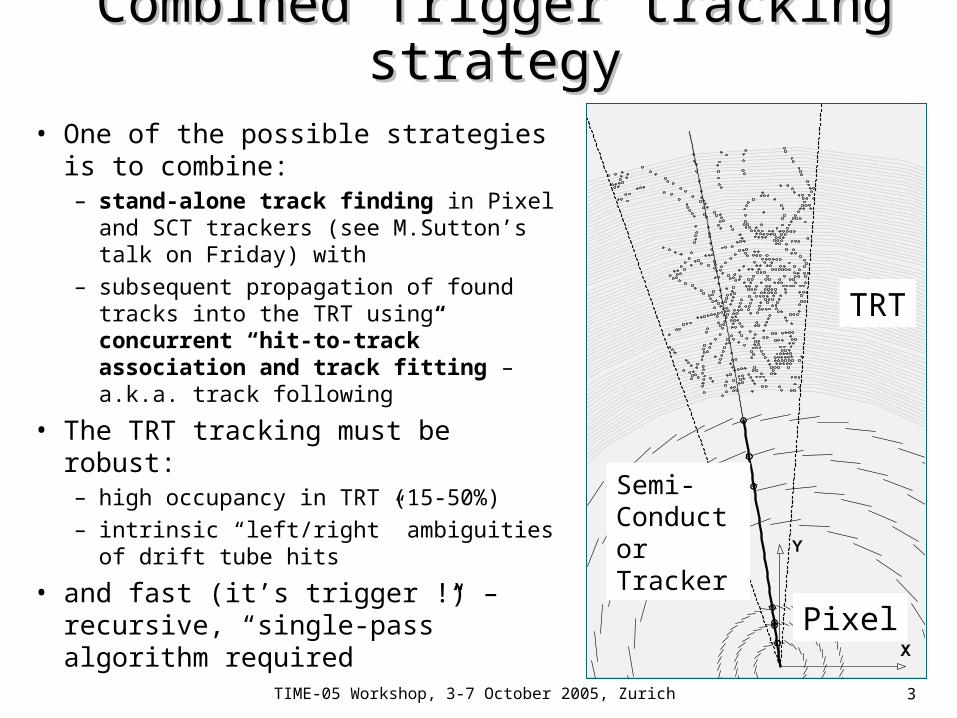
Combined Trigger tracking Combined Trigger tracking strategystrategy
• One of the possible strategies is to combine: – stand-alone track finding in Pixel
and SCT trackers (see M.Sutton’s talk on Friday) with
– subsequent propagation of found tracks into the TRT using concurrent “hit-to-track” association and track fitting – a.k.a. track following
• The TRT tracking must be robust:– high occupancy in TRT (15-50%)– intrinsic “left/right” ambiguities of
drift tube hits
• and fast (it’s trigger !) – recursive, “single-pass” algorithm required
Pixel
Semi-Conductor Tracker
TRT
TIME-05 Workshop, 3-7 October 2005, Zurich 4
Probabilistic Data Association Probabilistic Data Association FilterFilter
• Proposed by Y.Bar-Shalom in 1973 for radar tracking, adapted for many applications (robotics, computer vision)
• Main advantage: PDAF is a recursive algorithm computationally similar to the Kalman filter with almost linear execution time
• Basic requirements/assumptions:– Measurements (hits) are arranged into groups (“scans”=layers)– Assumption 1: There is a single track-of-interest and at most
one hit per layer originates from this track– Assumption 2: All the other hits are caused by the background– Assumption 3: A track can be undetected in some layers
• The PDAF consists of the two main blocks: data association and track update
TIME-05 Workshop, 3-7 October 2005, Zurich 5
The Probabilistic Data The Probabilistic Data AssociationAssociation
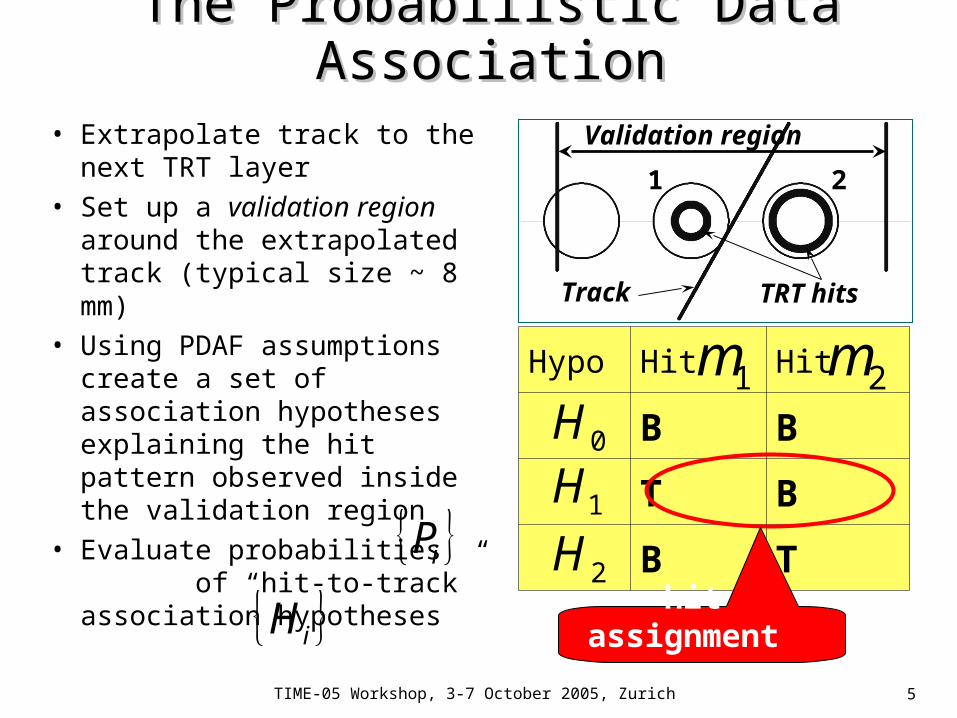
• Extrapolate track to the next TRT layer
• Set up a validation region around the extrapolated track (typical size ~ 8 mm)
• Using PDAF assumptions create a set of association hypotheses explaining the hit pattern observed inside the validation region
• Evaluate probabilities of “hit-to-track” association hypotheses
Track
Validation region
TRT hits
Hypo Hit Hit
B B
T B
B T
0H
1H
2H
1 2
hit assignment
1m 2m
iP iH
TIME-05 Workshop, 3-7 October 2005, Zurich 6
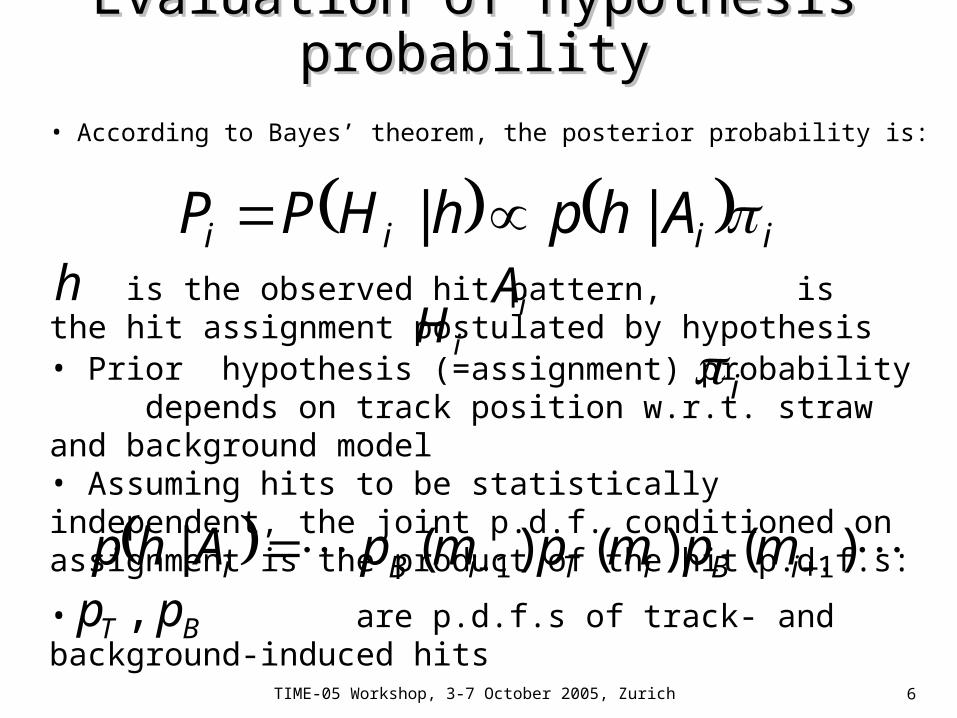
Evaluation of hypothesis Evaluation of hypothesis probabilityprobability
• According to Bayes’ theorem, the posterior probability is:
Bp,Tp
iiii AhphHPP || is the observed hit pattern, is the hit assignment postulated by hypothesis h iA
iH• Prior hypothesis (=assignment) probability depends on track position w.r.t. straw and background model• Assuming hits to be statistically independent, the joint p.d.f. conditioned on assignment is the product of the hit p.d.f.s: )()()(| 11 iBiTiBi mpmpmpAhp
i
• are p.d.f.s of track- and background-induced hits
TIME-05 Workshop, 3-7 October 2005, Zurich 7
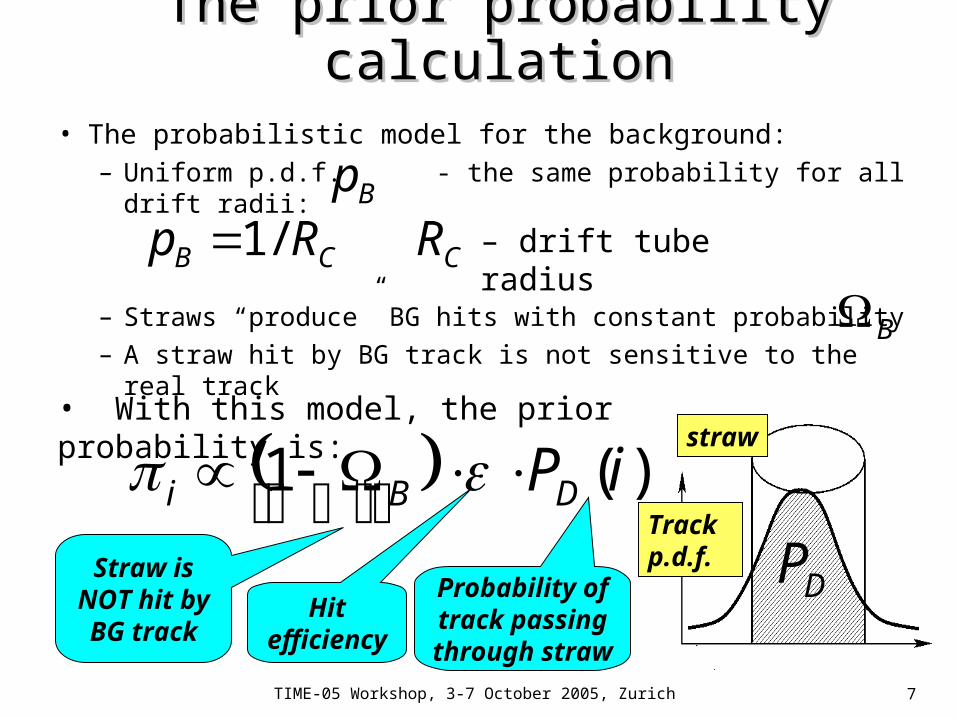
The prior probability The prior probability calculationcalculation
• The probabilistic model for the background:– Uniform p.d.f. - the same probability for all drift
radii:
– Straws “produce” BG hits with constant probability– A straw hit by BG track is not sensitive to the real track
Bp
B
• With this model, the prior probability is: )(1 iPDBi
Straw is NOT hit by BG track
Hit efficiency
Probability of track passing through straw
straw
Track p.d.f.
DP
CB Rp /1 CR – drift tube radius
TIME-05 Workshop, 3-7 October 2005, Zurich 8
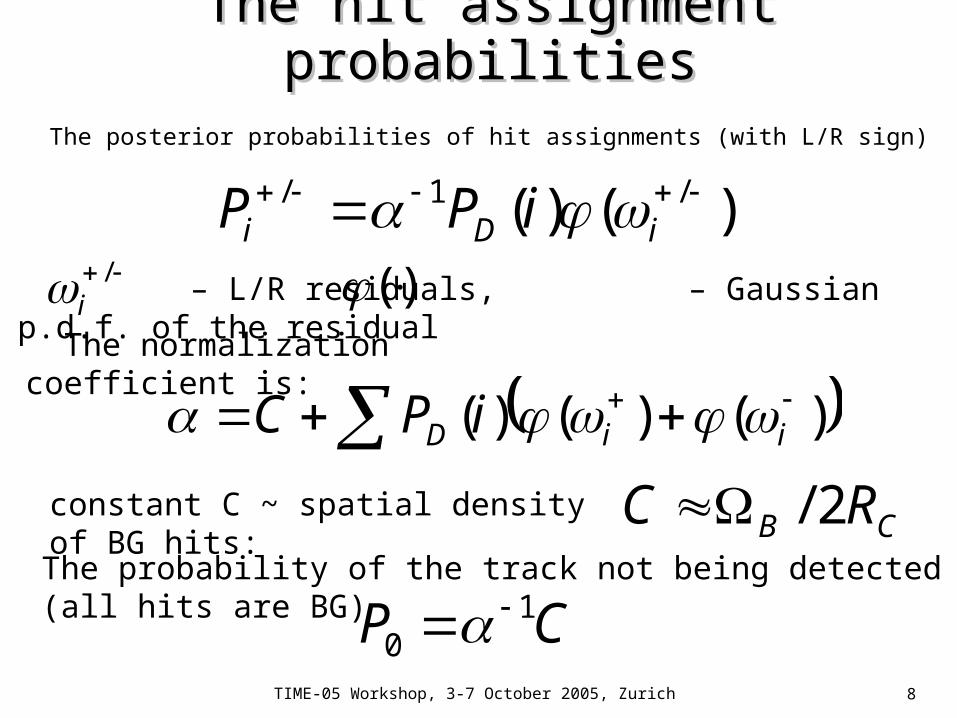
The hit assignment The hit assignment probabilitiesprobabilities
The posterior probabilities of hit assignments (with L/R sign)
)()()( iiD iPC
– L/R residuals, – Gaussian p.d.f. of the residual
/i )(
The probability of the track not being detected (all hits are BG) CP 1
0
constant C ~ spatial density of BG hits: CB RC 2/
)()( /1/ iDi iPP
The normalization coefficient is:
TIME-05 Workshop, 3-7 October 2005, Zurich 9
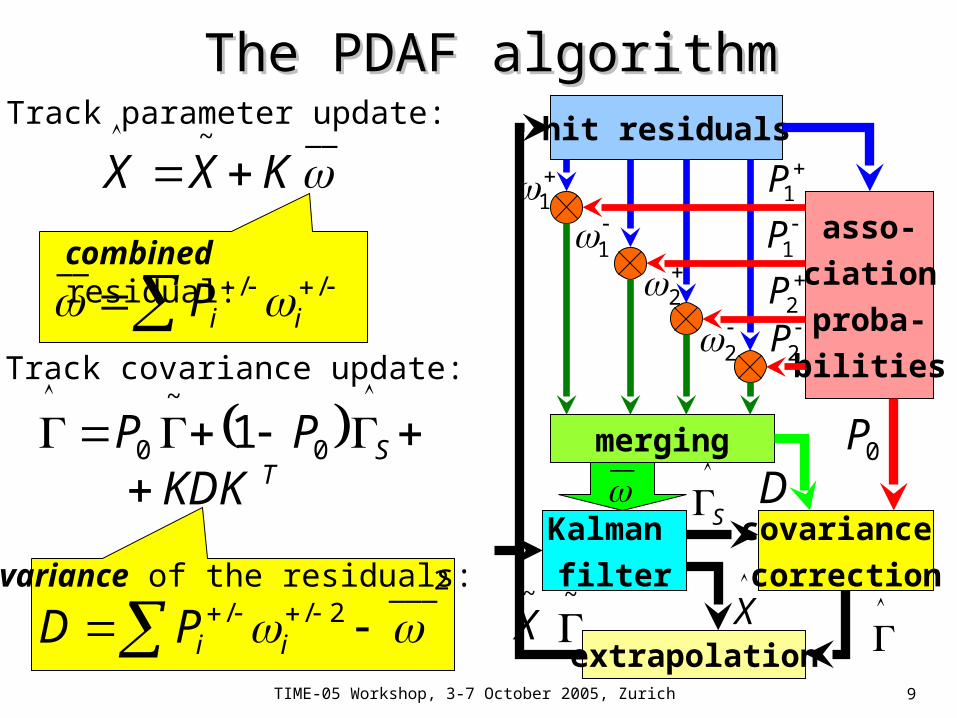
The PDAF algorithmThe PDAF algorithmhit residuals
asso-
ciation
proba-
bilities
Kalman filter
merging
covariance
correction
extrapolation
__
D0P
1P1P2P2P
1
1
2
2
S
X
~
X~
1. Track parameter update:__~
KXX
combined residual: //__
iiP 2. Track covariance update:
SPP 0
~
0 1TKDK
2___2//
iiPDvariance of the residuals:
TIME-05 Workshop, 3-7 October 2005, Zurich 10
Similar algorithms: GSF and Similar algorithms: GSF and DAFDAF
• Gaussian Sum Filter (GSF):– GSF is equivalent to PDAF if all Gaussian components (track para-
meter estimates) are merged into a single Gaussian after each layer
– PDAF is faster because merging 1-dim residuals is faster than merging 5-dim track estimates
• Deterministic Annealing Filter (DAF):– DAF is an iterative algorithm which refines assignment
probabilities through passes of re-weighted forward/backward filtering with gradually lowered measurement variance (annealing)
– PDAF is a “single-pass” algorithm (no iterations/annealing) more suitable for trigger applications
– The PDAF employs more elaborated hit association method which explicitly allows for the “no-detection” hypothesis – a typical case in the TRT due to the spacing between straws (2.8 mm)
TIME-05 Workshop, 3-7 October 2005, Zurich 11
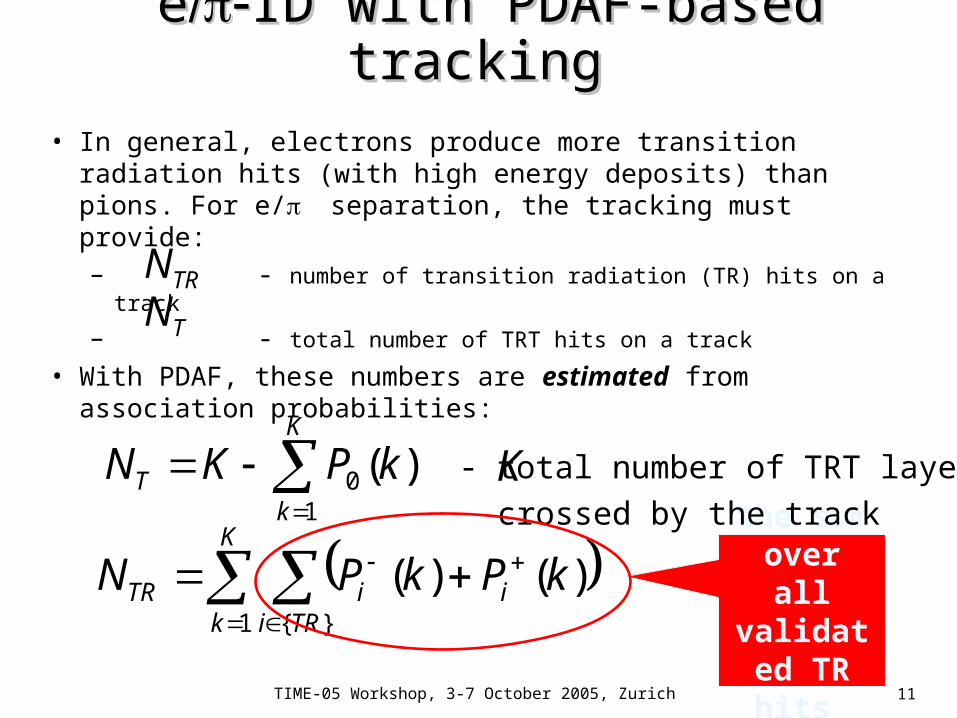
eeID with PDAF-based ID with PDAF-based tracking tracking
• In general, electrons produce more transition radiation hits (with high energy deposits) than pions. For e/ separation, the tracking must provide:– - number of transition radiation (TR) hits on a track
– - total number of TRT hits on a track
• With PDAF, these numbers are estimated from association probabilities:
TRN
TN
K
kT kPKN
10 )(
K
k TRiiiTR kPkPN
1 }{
)()(the sum over all
validated TR hits
K - total number of TRT layers
crossed by the track
TIME-05 Workshop, 3-7 October 2005, Zurich 12
PDAF performance evaluationPDAF performance evaluation
• Studies have been done on ATLAS Monte Carlo data:– Signal events: electrons, =20 GeV – Background events: inelastic pp interactions
• Three data sets:1. Signal events only2. Signal + <4.5> inel. interactions (Poisson) ~ “low lumi” regime3. Signal + <23> inel. interactions (Poisson) ~ “high lumi” regime
• Performance criteria:• Quality of “hit-to-track” association – average
assignment probabilities for the true and background hits– hits are identified according to Monte Carlo truth information
• Robustness of the PDAF – the performance versus occupancy
Tp
TIME-05 Workshop, 3-7 October 2005, Zurich 13
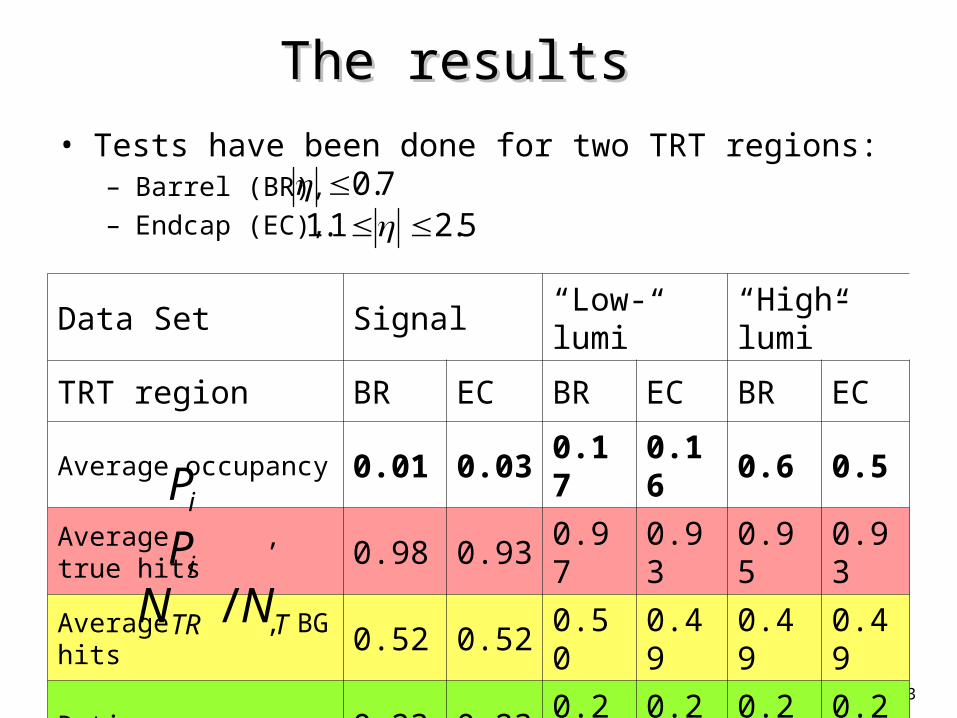
The resultsThe results
Data Set Signal“Low-lumi”
“High-lumi”
TRT region BR EC BR EC BR EC
Average occupancy 0.010.03
0.17
0.16
0.6 0.5
Average , true hits 0.98 0.93 0.97 0.93 0.95
0.93
Average , BG hits 0.52 0.52 0.50 0.49 0.490.49
Ratio 0.23 0.23 0.23 0.24 0.250.25
iP
iP
• Tests have been done for two TRT regions:– Barrel (BR), – Endcap (EC),
7.05.21.1
TTR NN /
TIME-05 Workshop, 3-7 October 2005, Zurich 14
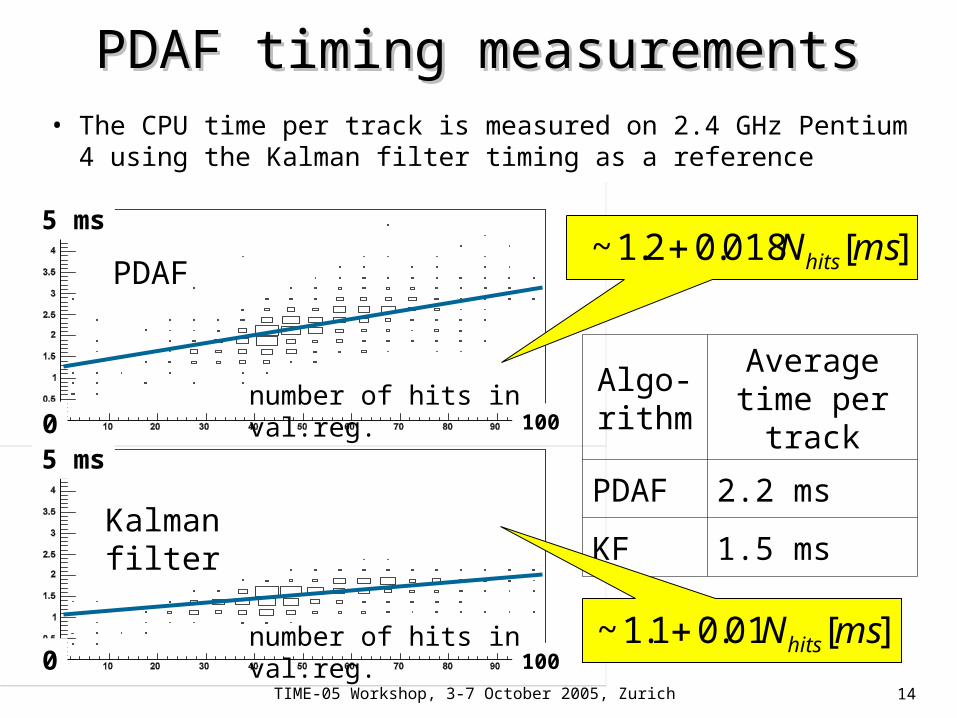
PDAF timing measurementsPDAF timing measurements• The CPU time per track is measured on 2.4 GHz Pentium
4 using the Kalman filter timing as a reference
PDAF
Kalman filter
Algo-rithm
Average time per
track
PDAF 2.2 ms
KF 1.5 ms
0
5 ms
5 ms
100
0 100][01.01.1~ msNhits
][018.02.1~ msNhits
number of hits in val.reg.
number of hits in val.reg.
TIME-05 Workshop, 3-7 October 2005, Zurich 15
DiscussionDiscussion
• Performance: The PDAF identifies true hits with 93-97% efficiency and provides 50% background rejection
• Lower efficiency in the endcap TRT regions is due to the large amount of material traversed by a track before TRT – higher probability of energy loss via Bremsstrahlung
• The ratio of TR hits/all hits calculated using PDAF association probabilities is almost independent from occupancy – good for reliable electron identification
• Timing: Computational requirements of the PDAF are comparable with those of the standard Kalman filter
• The probabilistic data association takes 30% of CPU time, track update – 20 %, track extrapolation – 50 %
TIME-05 Workshop, 3-7 October 2005, Zurich 16
ConclusionConclusion
• The new algorithm based on the Probabilistic Data Association Filter (PDAF) has been developed for track reconstruction in ATLAS Transition Radiation Tracker
• The tests on simulated data have shown that the PDAF is an efficient and not too slow alternative to the Kalman filter and can be used in concurrent track finding and fitting algorithms