-
Department of Informatics Robotics and Perception Group
Tim Oberhauser
Camera Localization in a3D Map
Semester Thesis
Robotics and Perception LabUniversity of Zurich
Supervision
Christian ForsterDavide Scaramuzza
February 2013
-
Contents
Abstract ii
1 Introduction 11.1 Related Work . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 1
2 Approach 22.1 Map Building . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 2
2.1.1 RGBDSLAM . . . . . . . . . . . . . . . . . . . . . . . . .
22.1.2 Filtering of the Map . . . . . . . . . . . . . . . . . . . .
. 3
2.2 Camera Localization . . . . . . . . . . . . . . . . . . . .
. . . . . 32.2.1 Feature Extraction . . . . . . . . . . . . . . . .
. . . . . . 42.2.2 Matching . . . . . . . . . . . . . . . . . . . .
. . . . . . . 42.2.3 Pose Estimation . . . . . . . . . . . . . . .
. . . . . . . . 5
3 Results 73.1 Intermediate Results . . . . . . . . . . . . . .
. . . . . . . . . . . 7
3.1.1 Kinect and AR.Drone Camera Compared . . . . . . . . .
83.1.2 Conclusion from the Intermediate Results . . . . . . . . .
11
3.2 Final Results . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 113.2.1 Feature Map . . . . . . . . . . . . . . . . . .
. . . . . . . 123.2.2 Kinect Camera . . . . . . . . . . . . . . . .
. . . . . . . . 133.2.3 AR.Drone Camera . . . . . . . . . . . . . .
. . . . . . . . 193.2.4 Performance Analysis . . . . . . . . . . .
. . . . . . . . . 19
4 Discussion 214.1 Future Work . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 22
i
-
Abstract
An approach has been implemented to estimate the pose of a
camera with re-spect to a 3D map. RGBDSLAM has been used to build a
3D map and has beenmodified to be able to export the information
needed to localize the camera - 3Dlocations and descriptors of all
features. Features are extracted from the cam-era image and matched
with the features of the 3D map using their descriptors.Finally,
the pose of the camera can be computed using a RanSaC
implemen-tation of the perspective-3-point (P3P) algorithm. If a
current pose estimateis available, the camera model can be used to
select the features of the mapthat are currently believed to be
visible by the camera. This way the numberof features in the
matching part of the algorithm, which is computationally themost
expensive step, can be reduced substantially. From the
implementation ofRGBDSLAM it was given that features exist multiple
times in the feature map.To speed up the matching step, an option
has been added to filter out thesemultiple features. The approach
has been evaluated in practical experimentsby using the RGB camera
of the Kinect without its depth measurement andfinally with the
front camera of the AR.Drone.
ii
-
Chapter 1
Introduction
The broader scope of this project is to use a ground robot
paired with a microunmanned aerial vehicle (MAV) for indoor
exploration. The ground robot couldbe equipped with a RGB+depth
camera such as the Kinect which can be usedto build a 3D model of
the environment. To prevent the MAV from collidingwith walls, it
needs to be localized with respect to this map. This could be
doneby using the onboard camera of the MAV.The problem has been
simplified to localizing a camera in a 3D map, which isassumed to
be built beforehand. An approach has been implemented and
finallypresented and evaluated in this report.
1.1 Related Work
For a similar application - autonomous indoor exploration with a
ground robotand a MAV - Rudol et al. (2008) [1] came up with a
method to estimate thepose of the MAV with respect to the ground
robot. Light emitting diodes (LED)of different colors are mounted
on the MAV in a certain pattern. A monocularcamera on the ground
robot is used to detect the LED lights which can betranslated into
the MAVs relative pose using the known pattern.Many have tackled
the simultaneous localization and mapping (SLAM) problemusing
monocular cameras. Two famous ones are MonoSLAM [2] and PTAM
[3].The difference to this project is that the map can be built
with a RGB+depthcamera which could - by the additional depth
measurement - be more precise.The monocular camera is only used for
localization. However, the approachpresented can be seen as a
technique for measuring the pose and yet needs tobe combined with a
motion model to compete with the mentioned approachesin terms of
precision.
1
-
Chapter 2
Approach
The goal of this work is to find the camera pose with respect to
a 3D map byonly using its visual information. The approach
described in this report will useimage features from the camera
image to match with the 3D map. Thereforeonly the feature
descriptors and their 3D locations need to be passed to theroutine,
from here on such a structure will be called feature map.
2.1 Map Building
There are different approaches in building a 3D map. RGBDSLAM
[4] hasbeen chosen which uses a RGB-D (RGB + depth) camera such as
the MicrosoftKinect. Intentionally, this algorithm was only
minimally modified, as it mightbe replaced by another routine that
suits the problem at hand better. Butas it was not fundamentally
changed, the algorithm needs to be well under-stood to identify
potential drawbacks. In the following section the algorithm
issummarized briefly.The only modification that was necessary was
to efficiently pass the feature mapto the proposed routine. This
was achieved by using a custom ROS messagetype [5], which contains
all descriptors and feature locations in a single messageand is
sent if requested by the user (by pressing CTRL+K in the
RGBDSLAMwindow).
2.1.1 RGBDSLAM
RGBDSLAM consists of a front-end and a back-end. The front-end
tries to findrelative poses between two key frames and the back-end
optimises these posesto form a globally consistent pose graph.For
every new key frame features are extracted and matched to the
featuresof a subset of previous key frames using the feature
descriptors. From thesecorrespondences and taking into account the
depth information at the key pointsthe relative transformation
between two key frames can be found. However,there can be false
matches and also the depth can be incorrect due to the shuttersof
the color and the infrared camera not being synchronized and
interpolationerrors. Therefore, a Random Sample Consensus (RanSaC)
step is executed,which randomly chooses three matched feature
pairs. At this stage, outliers
2
-
Chapter 2. Approach 3
can already be identified by comparing the pairwise Euclidean
distance. If thechosen samples fulfill this criteria, the rigid
transformation can be calculatedwhich is applied to all matched
features. A matched pair is considered aninlier if the distance
between the two features after applying the newly
foundtransformation is smaller than 3 cm. The transformation can be
refined byusing all inliers. This process is repeated and the
transformation with mostinliers is finally used. The key frame is
added if it could be matched with one ofthe previous key frames. If
a valid transformation could be found between twokey frames, an
edge is added in the pose graph. It is the task of the back-endto
optimize the pose graph to make it globally consistent. This is of
specialimportance in the case of loop closures.
Figure 2.1: 3D map built by RGBDSLAM
For every key frame - among others - the feature descriptors and
the featurelocations in 3D are stored. However, it is not saved
which features match withwhich features in other frames. If all
feature descriptors and their locationwould be exported, every
feature that has been observed in multiple key frameswill also
exist multiple times in the exported feature map. This can slow
downthe process of matching, which is why filtering the feature map
could be ofadvantage. One approach on filtering the feature map has
been implemented,which will be described in the next section.
2.1.2 Filtering of the Map
For every feature of the feature map the best k matches are
found by OpenCVsknnMatch from the DescriptorMatcher class [6]. If
the matches have a distancesmaller than a certain threshold, they
are considered to actually represent theexact same feature. The 3D
location of the features that are considered to belongtogether are
averaged to reduce the influence of noise of the depth
measurementsand errors from the map building process. Figure 2.2
shows the feature mapbefore and after filtering resulting from 2.1,
using a distance threshold of 0.5m.
2.2 Camera Localization
The working principle of the proposed algorithm is shown in
figure 2.3. Inorder to compute the camera pose with respect to the
feature map, pointsof the current image need to be registered to
points with known 3D positioni.e. the points of the feature map.
This step is done by matching the feature
-
4 2.2. Camera Localization
(a) (b)
Figure 2.2: Feature map (a) before and (b) after filtering,
displayed by rviz [7]
descriptors of the current image with the descriptors of the
feature map. Clearly,the descriptors of the feature map have to be
of the same kind as the descriptorsof the features of the current
image.
Figure 2.3: Working principle of the proposed algorithm
2.2.1 Feature Extraction
RGBDSLAM works with SIFT [8], SURF [9] and ORB [10] features. In
thisproject, only SIFT and SURF have been tested because they lead
to more ac-curate results. However, the approach presented here is
not intended to workexclusively with certain descriptors but should
be adaptable to other map build-ing approaches that use different
descriptors too.
2.2.2 Matching
OpenCVs BFMatcher [6] has been used to match the descriptors of
the cur-rent image to the descriptors of the feature map. For SURF
and SIFT featuresthe L2-norm can be used as an error measure
between two descriptors. The
-
Chapter 2. Approach 5
BFMatcher also has an option for cross-checking, with this
turned on, feature ifrom set A and feature j from set B are only
considered a match if j is the bestmatch for i and vice versa. This
method tends to produce the best matcheswith fewest outliers.
However, if a feature exists multiple times in one set -like in a
feature map built from RGBDSLAM - the probability of satisfying
thecross-checking criteria is decreased substantially. I therefore
recommend not touse cross-checking, if the map contains the same
features multiple times. Notethat with this option turned off,
BFMatcher will find a match for every feature.
Unfortunately matching of feature descriptors is computationally
quite expen-sive, as it involves the calculation of the L2 norm of
each possible feature pairsfrom set A and B. One way to accelerate
this step is to match the features ofthe current image with only a
subset of the features of the map. If an estimateof the current
camera pose is available, the features of the map can be
projectedto the image plane using the camera model. If a projected
feature lies withinthe boundaries of the image sensor it is
considered to be visible. Matching thefeatures of the current frame
only to the visible features of the feature map sug-gests itself.
This can substantially reduce the number of features to match
andaccordingly the computational cost. I distinguish between the
two cases: globalpose estimation - matching of features of the
current image with all features ofthe map - and tracking - matching
of features of the current image with onlythe visible features of
the map. Tracking is discussed in the next section.
Tracking
Obviously the pose must be known in order to project world
points into theimage plane. This is why, the first pose has to be
always calculated by globallocalization. After that, the pose
computed from the previous frame is alwaysused to project the
features for matching with the current frame. If the pro-posed
approach will be fused with a more advanced velocity model (and
othermeasurement techniques), self-evidently the current estimate
of the pose shouldbe used for projection.Matching the features of
the current image with only the visible features of thefeature map
can clearly speed-up the matching step of the algorithm. Also,
theprobability of wrong matches should decrease.If a wrong pose has
resulted from the pose estimation, also wrong features
arereprojected and tried to be matched. To alleviate the aftermath
of this occur-rence, a rule has been introduced: if for two
subsequent frames the resultingpose is not trusted, the next frames
are processed by global pose estimation. Assoon as a valid pose has
been found again, the routine switches back to tracking.In which
cases a pose is considered valid or not valid is discussed in
section 2.2.3.
2.2.3 Pose Estimation
After finding point correspondences, the camera pose can be
calculated usingthe perspective-three-point algorithm (P3P) [11],
more specifically a RanSaC[12] implementation thereof.The algorithm
randomly chooses a set of 3 matched feature pairs. First it has
tocheck the set for the degenerate case: the three points lie close
to a line. Also,another rule has been implemented: the distances of
3 points in the image must
-
6 2.2. Camera Localization
be greater than 10 pixels. Given that for one set the 3D
location of the points aregiven, with these 3 pairs, the possible
camera poses can generally be restrictedto four different ones. By
using the four possible camera poses, a fourth worldpoint can be
projected into the cameras image plane. The ambiguity can finallybe
solved by comparing the location of the projected point with the
location ofits match.Similarly, the other matched world points can
be projected to the image plane.If the distance between the
projected world point and its match are lower thana certain
reprojection threshold, it is considered an inlier.Finally the pose
with most inliers and a list of all the inliers are returned.The
resulting pose will have at least 4 inliers - the ones used for
computingthe pose. This would mean that not a single feature pair
supports the modelfound by the algorithm, a result like that is
very likely to be wrong and shouldtherefore not be trusted. A
minimum inlier threshold suggests itself, if thenumber of inliers
does not satisfy this condition, the pose is not consideredto be
valid. The choice of the threshold and the effect of such a measure
arediscussed in section 3.1.
-
Chapter 3
Results
After building a map using RGBDSLAM with the RGB and depth data
of theMicrosoft Kinect, every calibrated camera should be
localizable using only itsgrayscale images. The proposed approach
has been tested with two differentdevices, the Microsoft Kinect by
using the grayscale image without the depthinformation and the
AR.Drone 2 [13] by using its front camera.
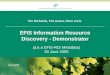
Figure 3.1: The flying room of the AI Lab of University of
Zurich, also showing6 of 10 cameras of the Optrack tracking system
[14]
Matching the features of a Kinect image with a map that has been
built also byusing the Kinect worked pretty well without adjusting
the parameters a lot. TheAR.Drone brought about some issues, which
could only be partly solved. Forthis camera it made sense to first
consider a simplified case, instead of directlytry to match the
image to the map. The experiment is introduced and presentedin the
next section. The goal of this was to explore some of the problems
ofthe AR.Drone camera and to come up with a reasonable choice for
some of theparameters. These were then used for localizing both
cameras in the 3D map.The results of that are presented in section
3.2.
3.1 Intermediate Results
The localization procedure involves matching of features of the
map with fea-tures extracted from the to-be-localized camera. The
map in our case will always
7
-
8 3.1. Intermediate Results
be built by the Kinect. Hence, it makes sense to investigate how
matching fea-tures from a Kinect frame to a Kinect frame and an
AR.Drone-frame to a Kinectframe compare. This has been investigated
by a very simple experiment whichis described in the following.A
single frame with depth information captured by the Kinect serves
as a re-placement for the map. The AR.Drone has been placed such
that it had thesame view point as the Kinect when the single frame
has been taken. The poseestimation process, described in chapter 2,
is run on each frame of the video.Since the camera has not been
moved, the correct solution is close to identity forthe rotational
and close to zero for the translational part. To have a
comparisonto the results from the AR.Drone, the same experiment has
also been conductedusing the Kinect.This experiment leaves aside
many issues that have arisen during localizationwith respect to the
feature map. For instance multiple features, noisy featureposition
due to the map building algorithm, very different view angles and
scales.There is no guarantee that the routine with the parameters
chosen from thissimple experiment will behave well in a much more
complicated environment,but tuning all the parameters by rerunning
the actual localization over and overagain would have been very
tiresome if not impossible.Another simplification made for these
experiments is that only SURF featureshave been used, with the
detector threshold held constant. The detector thresh-old basically
determines the number of features.In the following, the two cameras
are compared by using the described, simpleexperiment.
3.1.1 Kinect and AR.Drone Camera Compared
(a) (b)
Figure 3.2: A frame from (a) the AR.Drone at its higher
resolution and (b) theKinect from the test experiment
Feature Extraction
The AR.Drone camera has a resolution of 720 by 1280 pixels at a
frame rate of30 frames per second, the resolution can also be
switched to 360 by 640. Firstthe higher resolution is
considered.
-
Chapter 3. Results 9
The features of the AR.Drone image should be matched with the
feature of themap or in this case of a single frame coming from the
Kinect. The features ofthe map have also been extracted from a
Kinect image, which has a resolutionof 480 by 640. The feature
detection process involves the downsampling of theimage a certain
number of times, this number is commonly called number ofoctaves.
If features should be matched from cameras with different
resolution,the number of octaves has to be adjusted
accordingly.
By default, the number of octaves is set to 4, this is used to
build the mapand in this experiment, to extract features from the
Kinect image. If the samefeatures should be detected in an image
with double the resolution - the higherresolution AR.Drone image -
one more downsampling step has to be added, thenumber of octaves
for this image should be set to 5.
If this leads to better matches is difficult to state, but what
matters in theend is whether or not it leads to more accurate pose
estimation. Hence, theprecision resulting from 4 and 5 octaves for
the higher resolution image andfor the lower resolution image is
shown in table 3.1. The table also lists theprecision resulting
from matching a Kinect image to a single Kinect frame.The
reprojection threshold has been set to 4.0 for the higher
resolution testand to 2.0 for the lower resolution. Since all
images have been recorded fromthe same position, the translational
error was simply the distance from zero.The error caused by
imprecise placement of the AR.Drone camera is constantand -
compared to the precision of the algorithm - small. Using the
lowerresolution yields the best results of the AR.Drone images and
also brings aboutan advantage in computational time.
Table 3.1: Comparison of the localization with respect to a
single Kinect framewith an image of the AR.Drone at different
resolutions and using different num-bers of octaves and with the
Kinect
numberof octaves
translational error(meanstd.dev.) [m]
number of inliers(meanstd.dev.)
number ofmeasurements
Kinectto Kinect
4 0.0110 0.0083 369.18 13.59 68
AR.Droneto Kinect7201280 4 0.5113 0.4412 39.79 21.41 1107201280
5 0.4834 0.3809 44.25 24.06 109360640 4 0.4564 0.1541 49.57 10.99
95
Feature Matching
In figure 3.3 typical matching results from both cameras with a
Kinect frame areshown. Obviously, the matches from the AR.Drone to
the Kinect frame containmuch more false matches than the ones from
the Kinect to Kinect. Reasons forthis will be discussed in chapter
4.
-
10 3.1. Intermediate Results
(a)
(b)
(c)
Figure 3.3: Typical matching result of (a) two Kinect frames and
an AR.Droneframe with a Kinect frame, using (b) the higher
resolution image and (c) thelower resolution image
P3P RanSaC
Having seen the quality of the matches from the AR.Drone to the
Kinect frame,it is not surprising at all that the output of P3P is
also much worse for thiscase. Figure 3.4 confirms this.
A measure that has been mentioned before was the introduction of
a minimumnumber of inliers to decide whether or not a measurement
should be trusted.This has a notable impact only when getting very
noisy data. Such a situationhas been simulated by using a low
feature detector threshold of 50, instead of200. For this result,
the higher resolution image has been used. The imple-mentation of
an inlier threshold entails that some of the measurements are
lost.Figure 3.5 illustrates what impact an inlier threshold has on
the precision of thepose estimate.
-
Chapter 3. Results 11
(a)
(b)
(c)
Figure 3.4: Inliers after the P3P RanSaC step of (a) two Kinect
frames and anAR.Drone frame with a Kinect frame, using (b) the
higher resolution and (c)the lower resolution image
3.1.2 Conclusion from the Intermediate Results
Since the algorithm works with the lower resolution as well as
with the higherresolution, and taking into account the
computational advantage, from here on,only the lower resolution
images will be used.
Also, a minimum inlier threshold has been introduced. Through
many experi-ments, 8 proved to be a reasonable choice.
3.2 Final Results
In this section, the performance of the algorithm is tested in
the actual applica-tion - localizing a camera in a feature map. The
two cameras are considered astwo separate cases. In both cases, the
ground truth trajectory has been recordedby using the Optitrack
motion capture system [14]. The motion of an object
-
12 3.2. Final Results
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
4
5
6
iterations
err
or
[m]
original output of p3p
average error w/o threshold
outliers (
-
Chapter 3. Results 13
Figure 3.6: Trackable Kinect
based on SURF features to the one on SIFT features. To achieve
more precisemap building and to simulate the slow movement of the
ground robot, thedataset was actually played back at a fifth of the
original speed. This way, morekey frames were added.
Table 3.2: RGBDSLAM: standard setup
option standard choice
use SIFTGPU offfeature type SURFminimum number of features
600maximum number of features 1600feature matching FLANN [16]
3.2.2 Kinect Camera
For examining the influence of certain parameters on the
precision of the pro-posed approach, a standard setup has been
chosen. In each of the followingsections, one option of the
standard setup has been varied to investigate the im-pact on
precision and - if meaningful - computational time. The chosen
standardsetup is shown in table 3.3.
Reproducing the RGBDSLAM Trajectory
The dataset has been recorded by moving the trackable Kinect by
hand at arelatively low height to simulate a possible future
application with the Kinectmounted on a ground robot. Figure 3.7
shows the trajectory estimated by
-
14 3.2. Final Results
Table 3.3: Kinect localization: standard setup
part option standard choice
map building filter map ondistance threshold 0.5 m
feature extraction feature type SURFdetector threshold 200number
of octaves 4
feature matching tracking onP3P minimum inliers 8
reprojection threshold 1.5 pixelsmaximum iterations 1000maximum
data trials 40p-value 0.9999
RGBDSLAM and by the proposed approach as well as the ground
truth fromOptitrack. The precision of the two trajectory estimates
can be found in table3.4. Note that the ground truth trajectory
exhibits one clear disturbance whichwas most probably because the
person holding the camera blocked the view forthe tracking
system.
3 2 1 0 1 2 34
3.5
3
2.5
2
1.5
1
0.5
0
0.5
1
x [m]
y [
m]
proposed approach
RDBDSLAM
ground truth
Figure 3.7: Resulting trajectory estimate when trying to
reproduce the RGBD-SLAM trajectory with only the visual data using
the proposed approach instandard configuration
Reproducing a Free Trajectory
The same feature map is now used to estimate another trajectory.
Figure 3.8shows this trajectory and the trajectory estimated with
the standard configura-tion. The trajectory that has been used for
building the map with RGBDSLAM
-
Chapter 3. Results 15
Table 3.4: Comparison between RGBDSLAM and the proposed
approach
translational error (mean std.dev.) [m]
RGBDSLAM 0.1281 0.0800proposed approach 0.1856 0.2915
is also shown to illustrate their spacial relation, this will
not be shown in thefollowing plots.
3 2 1 0 1 2 34
3.5
3
2.5
2
1.5
1
0.5
0
0.5
1
x [m]
y [
m]
ground truth rgbdslam
proposed approach
ground truth
Figure 3.8: Resulting pose estimation of the Kinect with the
standard parameterset
Filtering of the Map As already explained in section 2.1.1, the
feature mapexported from RGBDSLAM contains all features of all key
frames. This way, ahuge amount of features is accumulated during
the map building process whichalso contains redundant information.
In section 2.1.2 an approach has been in-troduced to reduce the
number of same features existing multiple times in thefeature map.
This step is computationally quite expensive, but it has to be
ex-ecuted only once before localization starts, and it can reduce
the computationaltime of the localization.
The trajectory estimate without filtering the feature map
beforehand is shownin figure 3.9. The precision of the localization
and the computational time of thematching step - the step that is
mainly affected by a larger number of features- are compared in
table 3.5. A detailed discussion about the processing timesof all
the parts of the algorithm will follow in 3.2.4. Interestingly,
filtering themap beforehand yields more accurate results during the
localization and reducescomputational time of the matching
step.
-
16 3.2. Final Results
2 1.5 1 0.5 0 0.52.5
2
1.5
1
0.5
0
0.5
x [m]
y [
m]
proposed approach
ground truth
Figure 3.9: Resulting pose estimation of the Kinect without
filtering the mapbeforehand
Table 3.5: Kinect: Comparison of precision and processing time
of the matchingstep between localization with filtering the map and
not filtering the map
filter maptranslational error
(mean std.dev.) [m]average computation time
of matching [s]
on 0.3440 0.3091 0.3311off 0.3697 0.5851 1.1111
P3P: Reprojection Threshold Tuning the reprojection threshold of
theP3P RanSaC trades precision of the pose estimate against
robustness to noise.Both are reflected in the average error of the
localization. Values from 1.0 to3.0 pixels have been tested and the
resulting translational errors are shown intable 3.6 and plotted in
figure 3.10. Apparently a reprojection threshold of 1.5results in
the error with the lowest mean value and standard deviation.
Table 3.6: Kinect: Influence of P3Ps reprojection threshold on
the precision
reprojection threshold translational error (mean std.dev.)
[m]
1.0 0.3781 0.51301.5 0.3440 0.30912.0 0.4370 0.45932.5 0.5014
0.52183.0 0.4544 0.4631
-
Chapter 3. Results 17
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
reprojection threshold [pixels]
err
or
[m]
mean
std. dev.
Figure 3.10: Influence of the reprojection threshold on the
error of the positionestimate
Tracking vs. Global Localization As discussed in section 2.2.2,
matchingthe features of the current image only with the ones that
are believed to bevisible can speed up the matching part. But it
depends on a good estimate ofthe pose from the previous frame. The
precision and computational time of thematching step of the
localization with and without tracking are compared intable 3.7.
Not only is the tracking approach faster, it is also more precise.
Thiscould be caused by the fact that the probability of getting
wrong matches ishigher when matching the features of the current
image with all the features ofthe feature map.
2 1.5 1 0.5 0 0.52.5
2
1.5
1
0.5
0
0.5
x [m]
y [
m]
proposed approach
ground truth
Figure 3.11: Resulting pose estimation of the Kinect without
tracking
-
18 3.2. Final Results
Table 3.7: Kinect: Comparison of precision and processing time
of the matchingstep between tracking and global localization
trackingtranslational error
(mean std.dev.) [m]average computation time
of matching [s]
on 0.3440 0.3091 0.3311off 0.4020 0.4067 0.5890
SURF vs. SIFT SURF features have been used because of their
advantagein computational time. However, it is interesting to
investigate if SIFT featureslead to more precision of the
localization. Of course, for this case the maphas been built using
SIFT features. The precision of the trajectory estimateof RGBDSLAM
with SIFT features is comparable to the one with SURF: amean error
and its standard deviation of 0.1244 and 0.0764 respectively.
Thetrajectory estimate from the proposed algorithm is shown in
figure 3.12 and itsprecision compared to the one using SURF
features in table 3.8. From the plot,it seems that the trajectory
estimate with SIFT features is more precise but twooutliers raise
the mean and standard deviation of the error.
2 1.5 1 0.5 0 0.52.5
2
1.5
1
0.5
0
0.5
x [m]
y [
m]
proposed approach
ground truth
Figure 3.12: Trajectory estimate using SIFT features
Table 3.8: Kinect: Precision of the localization using SURF and
SIFT features
feature type translational error (mean std.dev.) [m]
SURF 0.3440 0.3091SIFT 0.3252 0.6625
-
Chapter 3. Results 19
3.2.3 AR.Drone Camera
In section 3.1.1, it has been shown that the matching part of
the algorithmdoes not work as well for the AR.Drone camera as for
the Kinect. Becauseof this, the pose estimation is more ambiguous
with this camera. The lowerimage resolution of 360 by 640 has been
used. To account for imprecise cameracalibration, the reprojection
threshold has been raised to 2.0 pixels, instead of1.5.The ground
truth and the estimated trajectory of the AR.Drone are depicted
infigure 3.13, the trajectory of the Kinect which has been used to
build the mapis again also shown. The quality of the trajectory
estimate is not as good asthe one of the Kinect, most probably due
to wrong matching. The mean andstandard deviation of the position
error can be taken from 3.9. Worth noting isthat out of 497 frames,
with SIFT 244 led to a valid pose and with SURF only48.
3 2 1 0 1 2 34
3.5
3
2.5
2
1.5
1
0.5
0
0.5
1
x [m]
y [
m]
ground truth rgbdslam
proposed approach
ground truth
3 2 1 0 1 2 34
3.5
3
2.5
2
1.5
1
0.5
0
0.5
1
x [m]
y [
m]
ground truth rgbdslam
proposed approach
ground truth
(a) (b)
Figure 3.13: AR.Drone trajectory estimate using (a) SURF and (b)
SIFT fea-tures
Table 3.9: AR.Drone: Precision of the localization using SURF
and SIFT fea-tures
feature type translational error (mean std.dev.) [m]
SURF 0.7923 0.5604SIFT 0.5363 0.4607
3.2.4 Performance Analysis
The average processing times of the different steps of a Kinect
and of a AR.Droneframe are shown in figure 3.14. In order to make
the results comparable, allresults shown have been measured with
SIFT features. All simulations havebeen run on a virtual machine
with 2 GB of memory and 4 CPUs with 2.6 GHz.The most expensive
parts are feature extraction and matching, causing a
totalprocessing time of 218.8 ms for a single Kinect frame. This
means that in a
-
20 3.2. Final Results
real-time application, only about 4 frames per second can be
processed. Foran image from the AR.Drone, this rate is increased to
almost 7 frames persecond. Note that the difference is this high,
mainly because of the differencein resolution.
0 10 20 30 40 50 60 70 80 90 100 110
Displaying: 24.1 ms
P3P RanSaC: 12.9 ms
Matching: 105.4 ms
Reproject: 0.6 ms
Extract Features: 74.9 ms
Average Processing Time [ms]0 10 20 30 40 50 60 70 80 90 100
110
Displaying: 13.7 ms
P3P RanSaC: 8.2 ms
Matching: 75.5 ms
Reproject: 0.5 ms
Extract Features: 49.5 ms
Average Processing Time [ms]
(a) Total: 217.8 ms (b) Total: 147.4 ms
Figure 3.14: Average processing times of (a) a Kinect frame and
(b) anAR.Drone frame, all using SIFT features and tracking
-
Chapter 4
Discussion
The approach presented in this report has been tested with two
cameras, theKinect and the front camera of the AR.Drone. With the
Kinect, it could beshown that the algorithm works in principle.
Precision can be improved, byfusing the measurements with a
physical model. However, using just the visualdata of the Kinect is
still not an application that would make sense in practice. Itonly
makes sense for cameras with no depth information, such as the
AR.Drone.For this camera, the algorithm did not work as well,
especially with SURFfeatures. An important reason for this is
certainly that matching of featuresfrom the AR.Drone image to
features from the Kinect image works poorly (seesection 3.1.1). In
order to make the algorithm work with this camera (andhopefully all
other cameras too) the source of wrong matching has to be
found.Therefore, the differences between the two cameras have to be
investigated:
radial distortion
different contrast and illumination due to different sensor
lens quality?
These are factors that could be responsible for the poor
matching in the frameto frame experiment (see section 3.1.1). In
the actual localization some otherdifficulties are added:
motion blur
different viewing angles and scales
About the difference from the sensor, lens quality, motion blur
and viewingangles nothing can be done. But about radial distortion
there could: in [17]the influence of radial distortion on SIFT
features has been studied and it isstated that the repeatability of
SIFT features can be improved by rectifying theimage before
extracting the features. Rectifying the image is a
computationallyexpensive step, hence a modified SIFT algorithm that
takes the radial distortioninto account has been proposed and
further improved in [18]. Unfortunately,an implementation of
sRD-SIFT is currently only available for MATLAB. SinceSURF features
are detected and extracted in a similar manner as SIFT features,the
statements probably apply to SURF features as well. However, the
influenceof radial distortion in this case is not expected to be
huge.
21
-
22 4.1. Future Work
4.1 Future Work
Most importantly, the presented approach should be combined with
a motionmodel to improve precision.For the results of this report,
timing issues have been ignored completely.Frames that have been
recorded at 30 Hz have been processed at 5 to 7 Hzwithout skipping
frames. If this approach was to run in a real-time
application,consequently frames would be skipped. To avoid skipping
of frames, i.e. notto lose track in quick turns, the algorithm
needs to be extended. For exampleby tracking features with optical
flow using the pyramidal implementation ofthe Lucas Kanade feature
tracker [19]: features that have been found as inliersfor the P3P
RanSaC step could be tracked. Since they are inliers, they havea
corresponding 3D location in the map and can therefore be fed to
the P3PRanSaC again. This way, the computation can be distributed
to two threadsrunning in parallel. Note that by tracking the P3P
inliers of one frame, thefeature extraction and matching can be
left out, which enables the algorithm torun real-time. The
principle is depicted in figure 4.1.
Figure 4.1: Proposition for extension of algorithm
A function that uses a previous image and the feature positions
of its inliers toestimate the pose using optical flow has already
been implemented and initialtests seemed promising.
-
Bibliography
[1] P. Rudol, M. Wzorek, G. Conte, and P. Doherty, Micro
unmanned aerialvehicle visual servoing for cooperative indoor
exploration, in AerospaceConference, 2008 IEEE, pp. 1 10, March
2008.
[2] A. Davison, I. Reid, N. Molton, and O. Stasse, Monoslam:
Real-time singlecamera slam, Pattern Analysis and Machine
Intelligence, IEEE Transac-tions on, vol. 29, pp. 1052 1067, june
2007.
[3] G. Klein and D. Murray, Parallel tracking and mapping for
small arworkspaces, in Mixed and Augmented Reality, 2007. ISMAR
2007. 6thIEEE and ACM International Symposium on, pp. 225 234, nov.
2007.
[4] F. Endres, J. Hess, N. Engelhard, J. Sturm, D. Cremers, and
W. Burgard,An evaluation of the rgb-d slam system, in Robotics and
Automation(ICRA), 2012 IEEE International Conference on, pp. 1691
1696, May2012.
[5] http://www.ros.org/wiki/rosmsg. Accessed: 29/01/2013.
[6]
http://opencv.willowgarage.com/documentation/cpp/features2d_common_interfaces_of_descriptor_matchers.html.
Accessed:29/01/2013.
[7] http://www.ros.org/wiki/rviz. Accessed: 23/02/2013.
[8] D. G. Lowe, Distinctive image features from scale-invariant
keypoints,Int. J. Comput. Vision, vol. 60, pp. 91110, Nov.
2004.
[9] H. Bay, A. Ess, T. Tuytelaars, and L. V. Gool, Speeded-up
robust features(surf), Computer Vision and Image Understanding,
vol. 110, no. 3, pp. 346 359, 2008.
[10] E. Rublee, V. Rabaud, K. Konolige, and G. Bradski, Orb: An
efficientalternative to sift or surf, in Computer Vision (ICCV),
2011 IEEE Inter-national Conference on, pp. 2564 2571, nov.
2011.
[11] L. Kneip, D. Scaramuzza, and R. Siegwart, A novel
parametrization of theperspective-three-point problem for a direct
computation of absolute cam-era position and orientation, in
Computer Vision and Pattern Recognition(CVPR), 2011 IEEE Conference
on, pp. 2969 2976, June 2011.
23
http://www.ros.org/wiki/rosmsghttp://opencv.willowgarage.com/documentation/cpp/features2d_common_interfaces_of_descriptor_matchers.htmlhttp://opencv.willowgarage.com/documentation/cpp/features2d_common_interfaces_of_descriptor_matchers.htmlhttp://www.ros.org/wiki/rviz
-
[12] M. A. Fischler and R. C. Bolles, Random sample consensus: a
paradigmfor model fitting with applications to image analysis and
automated car-tography, Commun. ACM, vol. 24, pp. 381395, June
1981.
[13] http://ardrone2.parrot.com/usa/. Accessed: 11/02/2013.
[14] http://www.naturalpoint.com/optitrack/. Accessed:
20/02/2013.
[15] D. Eggert, A. Lorusso, and R. Fisher, Estimating 3-d rigid
body trans-formations: a comparison of four major algorithms,
Machine Vision andApplications, vol. 9, pp. 272290, 1997.
[16] M. Muja and D. G. Lowe, Fast approximate nearest neighbors
with au-tomatic algorithm configuration, in In VISAPP International
Conferenceon Computer Vision Theory and Applications, pp. 331340,
2009.
[17] M. Lourenco, J. Barreto, and A. Malti, Feature detection
and matching inimages with radial distortion, in Robotics and
Automation (ICRA), 2010IEEE International Conference on, pp. 1028
1034, may 2010.
[18] M. Lourenco, J. Barreto, and F. Vasconcelos, srd-sift:
Keypoint detectionand matching in images with radial distortion,
Robotics, IEEE Transac-tions on, vol. 28, pp. 752 760, june
2012.
[19] J.-Y. Bouguet, Pyramidal implementation of the lucas kanade
featuretracker description of the algorithm, 2000.
http://ardrone2.parrot.com/usa/http://www.naturalpoint.com/optitrack/
-
Robotics and Perception Group
Title of work:
Camera Localization in a 3D Map
Thesis type and date:
Semester Thesis, February 2013
Supervision:
Christian ForsterDavide Scaramuzza
Student:
Name: Tim OberhauserE-mail: [email protected].: 07-919-806
Statement regarding plagiarism:
By signing this statement, I affirm that I have read the
information noticeon plagiarism, independently produced this paper,
and adhered to the generalpractice of source citation in this
subject-area.
Information notice on plagiarism:
http://www.ethz.ch/students/semester/plagiarism_s_en.pdf
Zurich, 6. 3. 2013:
http://www.ethz.ch/students/semester/plagiarism_s_en.pdf
AbstractIntroductionRelated Work
ApproachMap BuildingRGBDSLAMFiltering of the Map
Camera LocalizationFeature ExtractionMatchingPose Estimation
ResultsIntermediate ResultsKinect and AR.Drone Camera
ComparedConclusion from the Intermediate Results
Final ResultsFeature MapKinect CameraAR.Drone CameraPerformance
Analysis
DiscussionFuture Work