Embed Size (px)
Citation preview

Computational liquid Crystal photoniCs
Computational liquid Crystal photoniCsFundamentals modelling and appliCations
salah obayyaCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaEgypt
mohamed Farhat o hameed and nihal FF areedCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaandFaculty of Engineering Mansoura UniversityMansouraEgypt
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQ United Kingdom
For details of our global editorial offices for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright Designs and Patents Act 1988
All rights reserved No part of this publication may be reproduced stored in a retrieval system or transmitted in any form or by any means electronic mechanical photocopying recording or otherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without the prior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in print may not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarks All brand names and product names used in this book are trade names service marks trademarks or registered trademarks of their respective owners The publisher is not associated with any product or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their best efforts in preparing this book they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose It is sold on the understanding that the publisher is not engaged in rendering professional services and neither the publisher nor the author shall be liable for damages arising herefrom If professional advice or other expert assistance is required the services of a competent professional should be sought
Library of Congress Cataloging‐in‐Publication data applied for
ISBN 9781119041955
A catalogue record for this book is available from the British Library
Set in 1012pt Times by SPi Global Pondicherry India
1 2016
All Praise is due to Allah and peace and blessings be upon Prophet Muhammad and upon his family and his Companions
The authors would like to dedicate this book to Prof Ahmed Zewail for his continuous encouragement support and the opportunity to contribute to the Egypt National project of renaissance Zewail City of Science and Technology
The authors would also like to dedicate the book to their families whose love support patience and understanding are beyond any scope
Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Computational liquid Crystal photoniCs
Computational liquid Crystal photoniCsFundamentals modelling and appliCations
salah obayyaCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaEgypt
mohamed Farhat o hameed and nihal FF areedCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaandFaculty of Engineering Mansoura UniversityMansouraEgypt
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQ United Kingdom
For details of our global editorial offices for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright Designs and Patents Act 1988
All rights reserved No part of this publication may be reproduced stored in a retrieval system or transmitted in any form or by any means electronic mechanical photocopying recording or otherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without the prior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in print may not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarks All brand names and product names used in this book are trade names service marks trademarks or registered trademarks of their respective owners The publisher is not associated with any product or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their best efforts in preparing this book they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose It is sold on the understanding that the publisher is not engaged in rendering professional services and neither the publisher nor the author shall be liable for damages arising herefrom If professional advice or other expert assistance is required the services of a competent professional should be sought
Library of Congress Cataloging‐in‐Publication data applied for
ISBN 9781119041955
A catalogue record for this book is available from the British Library
Set in 1012pt Times by SPi Global Pondicherry India
1 2016
All Praise is due to Allah and peace and blessings be upon Prophet Muhammad and upon his family and his Companions
The authors would like to dedicate this book to Prof Ahmed Zewail for his continuous encouragement support and the opportunity to contribute to the Egypt National project of renaissance Zewail City of Science and Technology
The authors would also like to dedicate the book to their families whose love support patience and understanding are beyond any scope
Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
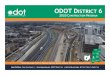
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
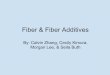
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Computational liquid Crystal photoniCsFundamentals modelling and appliCations
salah obayyaCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaEgypt
mohamed Farhat o hameed and nihal FF areedCenter for Photonics and Smart MaterialsZewail City of Science and TechnologyGizaandFaculty of Engineering Mansoura UniversityMansouraEgypt
This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQ United Kingdom
For details of our global editorial offices for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright Designs and Patents Act 1988
All rights reserved No part of this publication may be reproduced stored in a retrieval system or transmitted in any form or by any means electronic mechanical photocopying recording or otherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without the prior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in print may not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarks All brand names and product names used in this book are trade names service marks trademarks or registered trademarks of their respective owners The publisher is not associated with any product or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their best efforts in preparing this book they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose It is sold on the understanding that the publisher is not engaged in rendering professional services and neither the publisher nor the author shall be liable for damages arising herefrom If professional advice or other expert assistance is required the services of a competent professional should be sought
Library of Congress Cataloging‐in‐Publication data applied for
ISBN 9781119041955
A catalogue record for this book is available from the British Library
Set in 1012pt Times by SPi Global Pondicherry India
1 2016
All Praise is due to Allah and peace and blessings be upon Prophet Muhammad and upon his family and his Companions
The authors would like to dedicate this book to Prof Ahmed Zewail for his continuous encouragement support and the opportunity to contribute to the Egypt National project of renaissance Zewail City of Science and Technology
The authors would also like to dedicate the book to their families whose love support patience and understanding are beyond any scope
Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

This edition first published 2016copy 2016 John Wiley amp Sons Ltd
Registered OfficeJohn Wiley amp Sons Ltd The Atrium Southern Gate Chichester West Sussex PO19 8SQ United Kingdom
For details of our global editorial offices for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at wwwwileycom
The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright Designs and Patents Act 1988
All rights reserved No part of this publication may be reproduced stored in a retrieval system or transmitted in any form or by any means electronic mechanical photocopying recording or otherwise except as permitted by the UK Copyright Designs and Patents Act 1988 without the prior permission of the publisher
Wiley also publishes its books in a variety of electronic formats Some content that appears in print may not be available in electronic books
Designations used by companies to distinguish their products are often claimed as trademarks All brand names and product names used in this book are trade names service marks trademarks or registered trademarks of their respective owners The publisher is not associated with any product or vendor mentioned in this book
Limit of LiabilityDisclaimer of Warranty While the publisher and author have used their best efforts in preparing this book they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose It is sold on the understanding that the publisher is not engaged in rendering professional services and neither the publisher nor the author shall be liable for damages arising herefrom If professional advice or other expert assistance is required the services of a competent professional should be sought
Library of Congress Cataloging‐in‐Publication data applied for
ISBN 9781119041955
A catalogue record for this book is available from the British Library
Set in 1012pt Times by SPi Global Pondicherry India
1 2016
All Praise is due to Allah and peace and blessings be upon Prophet Muhammad and upon his family and his Companions
The authors would like to dedicate this book to Prof Ahmed Zewail for his continuous encouragement support and the opportunity to contribute to the Egypt National project of renaissance Zewail City of Science and Technology
The authors would also like to dedicate the book to their families whose love support patience and understanding are beyond any scope
Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

All Praise is due to Allah and peace and blessings be upon Prophet Muhammad and upon his family and his Companions
The authors would like to dedicate this book to Prof Ahmed Zewail for his continuous encouragement support and the opportunity to contribute to the Egypt National project of renaissance Zewail City of Science and Technology
The authors would also like to dedicate the book to their families whose love support patience and understanding are beyond any scope
Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Contents
Preface xv
Part I BasIc PrIncIPles 1
1 Principles of Waveguides 311 Introduction 312 Basic Optical Waveguides 413 Maxwellrsquos Equations 614 The Wave Equation and Its Solutions 715 Boundary Conditions 916 Phase and Group Velocity 10
161 Phase Velocity 10162 Group Velocity 11
17 Modes in Planar Optical Waveguide 12171 Radiation Modes 13172 Confinement Modes 13
18 Dispersion in Planar Waveguide 13181 lntermodal Dispersion 14182 lntramodal Dispersion 14
19 Summary 15References 15
2 Fundamentals of Photonic crystals 1721 Introduction 1722 Types of PhCs 18
221 1D PhCs 18222 2D PhCs 19223 3D PhCs 21
viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

viii Contents
23 Photonic Band Calculations 21231 Maxwellrsquos Equations and the PhC 22232 FloquetndashBloch Theorem Reciprocal Lattice
and Brillouin Zones 23233 Plane Wave Expansion Method 26234 FDTD Method 29
2341 Band Structure 292342 Transmission Diagram 30
235 Photonic Band for Square Lattice 3024 Defects in PhCs 3125 Fabrication Techniques of PhCs 32
251 Electron‐Beam Lithography 32252 Interference Lithography 33253 Nano‐Imprint Lithography 33254 Colloidal Self‐Assembly 34
26 Applications of PhCs 3427 Photonic Crystal Fiber 35
271 Construction 35272 Modes of Operation 36
2721 High Index Guiding Fiber 362722 PBG Fibers 36
273 Fabrication of PCF 37274 Applications of PCF 37
28 Summary 37References 37
3 Fundamentals of liquid crystals 4131 Introduction 4132 Molecular Structure and Chemical Composition
of an LC Cell 4233 LC Phases 42
331 Thermotropic LCs 443311 Nematic Phase 443312 Smectic Phase 443313 Chiral Phases 453314 Blue Phases 463315 Discotic Phases 46
332 Lyotropic LCs 47333 Metallotropic LCs 48
34 LC Physical Properties in External Fields 48341 Electric Field Effect 48342 Magnetic Field Effect 49
3421 Frederiks Transition 4935 Theortitcal Tratment of LC 50
351 LC Parameters 503511 Director 503512 Order Parameter 50
352 LC Models 51
Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Contents ix
3521 Onsager Hard‐Rod Model 513522 MaierndashSaupe Mean Field Theory 523523 McMillanrsquos Model 52
36 LC Sample Preparation 5237 LCs for Display Applications 5338 LC Thermometers 5439 Optical Imaging 54310 LC into Fiber Optics and LC Planar Photonic Crystal 54311 LC Solar Cell 55References 55
Part II numerIcal technIques 57
4 Full‐Vectorial Finite‐Difference method 5941 Introduction 5942 Overview of Modeling Methods 5943 Formulation of the FVFDM 60
431 Maxwellrsquos Equations 60432 Wave Equation 61433 Boundary Conditions 63434 Maxwellrsquos Equations in Complex Coordinate 64435 Matrix Solution 65
4351 Power Method 654352 Inverse Power Method 664353 Shifted Inverse Power Method 66
44 Summary 66References 66
5 assessment of the Full‐Vectorial Finite‐Difference method 6951 Introduction 6952 Overview of the LC‐PCF 6953 Soft Glass 7054 Design of Soft Glass PCF with LC Core 7155 Numerical Results 73
551 FVFDM Validation 73552 Modal Hybridness 74553 Effective Index 75554 Effective Mode Area 76555 Nonlinearity 76556 Birefringence 77557 Effect of the NLC Rotation Angle 80558 Effect of the Temperature 81559 Elliptical SGLC‐PCF 83
56 Experimental Results of LC‐PCF 84561 Filling Temperature 84562 Filling Time 84
57 Summary 85References 85
x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

x Contents
6 Full‐Vectorial Beam Propagation method 8961 Introduction 8962 Overview of the BPMs 8963 Formulation of the FV‐BPM 90
631 Slowly Varying Envelope Approximation 91632 Paraxial and Wide‐Angle Approximation 92
64 Numerical Assessment 93641 Overview of Directional Couplers 93642 Design of the NLC‐PCF Coupler 94643 Effect of the Structural Geometrical Parameters 94644 Effect of Temperature 97645 Effect of the NLC Rotation Angle 98646 Elliptical NLC‐PCF Coupler 98647 Beam Propagation Analysis of the NLC‐PCF Coupler 101
65 Experimental Results of LC‐PCF Coupler 10266 Summary 103References 103
7 Finite‐Difference time Domain method 10571 Introduction 10572 Numerical Derivatives 10673 Fundamentals of FDTD 106
731 1D Problem in Free Space 107732 1D Problem in a Lossless Medium 109733 1D Problem in a Lossy Medium 109734 2D Problem 110735 3D Problem 112
74 Stability for FDTD 11575 Feeding Formulation 11676 Absorbing Boundary Conditions 116
761 Murrsquos ABCs 117762 Perfect Matched Layer 117
77 1D FDTD Sample Code 120771 Source Simulation 120772 Structure Simulation 121773 Propagation Simulation 122
78 FDTD Formulation for Anisotropic Materials 12479 Summary 126References 126
Part III aPPlIcatIons oF lc DeVIces 129
8 Polarization rotator liquid crystal Fiber 13181 Introduction 13182 Overview of PRs 132
Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Contents xi
83 Practical Applications of PRs 13384 Operation Principles of PRs 13485 Numerical Simulation Strategy 13586 Design of NLC‐PCF PR 13687 Numerical Results 138
871 Hybridness 138872 Operation of the NLC‐PCF PR 139873 Effect of Structure Geometrical Parameters 142
8731 Effect of the dΛ Ratio 1428732 Effect of the Hole Pitch Λ 143
874 Tolerance of the NLC Rotation Angle 143875 Tolerance of Structure Geometrical Parameters 144
8751 Tolerance of the dΛ Ratio 1448752 Tolerance of the Hole Shape 1458753 Tolerance of the Hole Position 146
876 Tolerance of the Temperature 148877 Tolerance of the Operating Wavelength 150
88 Ultrashort Silica LC‐PCF PR 15089 Fabrication Aspects of the NLC‐PCF PR 155810 Summary 156References 156
9 applications of nematic liquid crystal‐Photonic crystal Fiber coupler 15991 Introduction 15992 MultiplexerndashDemultiplexer 159
921 Analysis of NLC‐PCF MUXndashDEMUX 159922 Beam Propagation Study of the NLC‐PCF MUXndashDEMUX 161923 CT of the NLC‐PCF MUXndashDEMUX 162924 Feasibility of the NLC‐PCF MUXndashDEMUX 163
93 Polarization Splitter 164931 Analysis of the NLC‐PCF Polarization Splitter 164932 Beam Propagation Study of the NLC‐PCF Polarization Splitter 164933 CT of the NLC‐PCF Splitter 166934 Feasibility of the NLC‐PCF Polarization Splitter 168
94 Summary 169References 169
10 coupling characteristics of a Photonic crystal Fiber coupler with liquid crystal cores 171101 Introduction 171102 Design of the PCF Coupler with LC Cores 172103 Numerical Results 173
1031 Effect of the Structural Geometrical Parameters 1731032 Effect of Temperature 1771033 Polarization Splitter Based on PCF Coupler with LC Cores 178
xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

xii Contents
10331 Analysis of the Polarization Splitter 17810332 Beam Propagation Analysis 17910333 Crosstalk 18110334 Feasibility of the Polarization Splitter 182
104 Summary 183References 183
11 liquid crystal Photonic crystal Fiber sensors 185111 Introduction 185112 LC‐PCF Temperature Sensor 186
1121 Design Consideration 1861122 Effects of the Structural Geometrical Parameters 1891123 Effect of the Temperature 1911124 Effect of the LC Rotation Angle 1911125 Sensitivity Analysis 192
113 Design of Single Core PLC‐PCF 1921131 Design Consideration 1921132 Effect of the LC Rotation Angle 1971133 Effect of the Structural Geometrical Parameters 1971134 Effect of the Temperature 201
114 Summary 202References 202
12 Image encryption Based on Photonic liquid crystal layers 205121 Introduction to Optical Image Encryption systems 205122 Symmetric Encryption Using PhC Structures 207
1221 Design Concept 2071222 EncryptorDecryptor Design 2111223 Simulation Results 212
123 Multiple Encryption System Using Photonic LC Layers 2161231 Proposed Encryption System 217
12311 PBG Structure 21712312 Liquid Crystals 21712313 Phase ModulatorPhotodetector 21912314 System Operation 219
1232 Simulation Results 219124 Summary 226References 227
13 optical computing Devices Based on Photonic liquid crystal layers 229131 Introduction to Optical Computing 229132 All‐Optical Router Based on Photonic LC Layers 231
1321 Device Architecture 23113211 PBG Structure 23113212 Liquid Crystals 23213213 System Operation 233
Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Contents xiii
1322 Simulation Results 2331323 Fabrication Tolerance 236
133 Optical Logic Gates Based on Photonic LC Layers 2371331 OR Logic Gate Based on PhC Platform 237
13311 PhC Platform 23813312 Optical OR Gate Architecture 23913313 Results and Discussion for OR Gate 239
1332 AND Logic Gate Based on a PhC Platform 24113321 Optical AND Gate Architecture 24213322 Results and Discussion for AND Gate 242
1333 Reconfigurable Gate Based on Photonic NLC Layers 24513331 Device Architecture 24513332 Bandgap Analysis of Photonic Crystal Platform 24613333 Simulation Results of the Reconfigurable Gate 247
134 Optical Memory Based on Photonic LC Layers 2521341 PhC Platform 2531342 Tunable Switch 2531343 Simulation Results 2551344 Fabrication Challenges 255
135 Summary 256References 257
Index 259
Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Preface
The turn toward optical computers and photonic integrated circuits in high‐capacity optical networks has attracted the interest of expert researchers This is because all optical packet switching and routing technologies can provide more efficient power and footprint scaling with increased router capacity Therefore it is aimed to integrate more optical processing ele-ments into the same chip and hence on‐chip processing capability and system intelligence can be increased The merging of components and functionalities decreases packaging cost and can bring photonic devices one step (or more) closer to deployment in routing systems
Photonic crystal devices can be used functionally as part of a comprehensive all‐photonic crystal‐based system where on the same photonic crystal platform many functionalities can be realized Therefore photonic crystals have recently received much attention due to their unique properties in controlling the propagation of light Many potential applications of photonic crystals require some capability for tuning through external stimuli It is anticipated that photonic crystals infiltrated with liquid crystals (LCs) will have high tunability with an external electric field and temperature For the vast majority of LCs the application of an electric field results in an orientation of the nematic director either parallel or perpendicular to the field depending on the sign of the dielectric anisotropy of the nematic medium The scope of this book is to propose optimize and simulate new designs for tunable broadband photonic devices with enhanced high levels of flexible integration and enhanced power processing using a combination of photonic crystal and nematic LC (NLC) layers The suggested NLC photonic devices include a coupler a polarization splitter a polarization rotator and a multiplexerndashdemultiplexer for telecommunication applications In addition LC photonic crystal‐based encryption and decryption devices will be introduced and LC‐based routers and sensors will be presented In almost all cases an accurate quantitative theoretical modeling of these devices has to be based on advanced computational techniques that solve the corresponding numerically very large linear nonlinear or coupled partial differential equations In this regard the book will also offer an easy‐to‐understand and yet comprehen-sive state‐of‐the‐art of computational modeling techniques for the analysis of lightwave propagation in a wide range of LC‐based modern photonic devices
xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

xvi Preface
There are many excellent books on LCs however several of these concentrate on the physics and chemistry of the LCs especially for LC display (LCD) applications In addition many books on photonic devices have been published in the recent years However it is still difficult to find one book in which highly tunable photonic crystal devices based on LC materials are discussed with a good balance of breadth and depth of coverage Therefore the book will represent a unique source for the reader to learn in depth about the modeling techniques and simulation of the processing light through many tunable LC devices
The primary audience for this book are undergraduate students the student will be taken from scratch until he can develop the subject himself The secondary audience are the business and industry experts working in the fields of information and communications technology security and sensors because the book intends to open up new possibilities for marketing new commercial products The audience of this book will also include the researchers at the early and intermediate stages working in the general areas of LC photonics The book consists of three parts LC basic principles numerical modeling techniques and LC‐based applications The first part includes three chapters where the basic principles of waveguides and modes photonic crystals and liquid crystals are given From Chapters 4 to 6 the numerical techniques operating in the frequency domain are presented Among them Chapter 4 presents the govern-ing equations for the full‐vectorial finite‐difference method (FVFDM) and perfectly matched layer (PML) scheme for the treatment of boundary conditions The FVFDM is then assessed in Chapter 5 where the modal analysis of LC‐based photonic crystal fiber (PCF) is given The FV beam propagation method (FVBPM) is presented in Chapter 6 to study the propagation along the LC‐PCF‐based applications After deriving the governing equations the FVBPM is numerically assessed through several optical waveguide examples The conventional finite‐difference time domain (FDTD) method in 2D and 3D as an example of the numerical techniques operating in the time domain is presented in Chapter 7
The third part consists of six chapters to cover the applications of the LC‐based photonic crystal devices From Chapters 8 to 10 the applications of the LC‐PCF for telecommunication devices such as couplers polarization rotators polarization splitters and multiplexerndash demultiplexers are introduced In addition the LC‐PCF sensors such as biomedical and temperature sensors are explained in Chapter 11 Photonic crystal‐based encryption systems for security applications are covered in Chapter 12 Optical computing devices such as optical routers optical memory and reconfigurable logic gates are introduced in Chapter 13
Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Part IBasic Principles
Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Computational Liquid Crystal Photonics Fundamentals Modelling and Applications First Edition Salah Obayya Mohamed Farhat O Hameed and Nihal FF Areed copy 2016 John Wiley amp Sons Ltd Published 2016 by John Wiley amp Sons Ltd
Principles of Waveguides
11 Introduction
A waveguide can be defined as a structure that guides waves such as electromagnetic or sound waves [1] In this chapter the basic principles of the optical waveguide will be intro-duced Optical waveguides can confine and transmit light over different distances ranging from tens or hundreds of micrometers in integrated photonics to hundreds or thousands of kilometers in long‐distance fiber‐optic transmission Additionally optical waveguides can be used as passive and active devices such as waveguide couplers polarization rotators optical routers and modulators There are different types of optical waveguides such as slab waveguides channel waveguides optical fibers and photonic crystal waveguides The slab waveguides can confine energy to travel only in one dimension while the light can be confined in two dimensions using optical fiber or channel waveguides Therefore the propagation losses will be small compared to wave propagation in open space Optical waveguides usually consist of high index dielectric material surrounded by lower index material hence the optical waves are guided through the high index material by a total internal reflection mechanism Additionally photonic crystal waveguides can guide the light through low index defects by a photonic bandgap guiding technique Generally the width of a waveguide should have the same order of magnitude as the wavelength of the guided wave
In this chapter the basic optical waveguides are discussed including waveguides operation Maxwellrsquos equations the wave equation and its solutions boundary conditions phase and group velocity and the properties of modes
1
4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

4 Computational Liquid Crystal Photonics
12 Basic Optical Waveguides
Optical waveguides can be classified according to their geometry mode structure refractive index distribution materials and the number of dimensions in which light is confined [2] According to their geometry they can be categorized by three basic structures planar rectangular channel and cylindrical channel as shown in Figure 11 Common optical waveguides can also be classified based on mode structure as single mode and multiple modes Figure 11a shows that the planar waveguide consists of a core that must have a refractive index higher than the refractive indices of the upper medium called the cover and the lower medium called the substrate The trapping of light within the core is achieved by total internal reflection Figure 11b shows the channel waveguide which represents the best choice for fabricating integrated photonic devices This waveguide consists of a rectangular channel that is sandwiched between an underlying planar substrate and the upper medium which is usually air To trap the light within a rectangular channel it is necessary for the channel to have a refractive index greater than that of the substrate Figure 11c shows the geometry of the cylindrical channel waveguide which consists of a central region referred to as the core and surrounding material called cladding Of course to confine the light within the core the core must have a higher refractive index than that of the cladding
Figure 12 shows the three most common types of channel waveguide structures which are called strip rip and buried waveguides It is evident from the figure that the main difference between the three types is in the shape and the size of the film deposited onto the substrate In the strip waveguide shown in Figure 12a a high index film is directly deposited on the sub-strate with finite width On the other hand the rip waveguide is formed by depositing a high index film onto the substrate and performing an incomplete etching around a finite width as shown in Figure 12b Alternatively in the case of the buried waveguide shown in Figure 12c
Film Film
FilmSubstrate
(a) (b) (c)
Figure 12 Common channel waveguides (a) strip (b) rip and (c) buried
Cover
(a) (b) (c)
Core
Substrate
SubstrateCladding
Core
Figure 11 Common waveguide geometries (a) planar (b) rectangular and (c) cylindrical
Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Principles of Waveguides 5
diffusion methods [2] are employed in order to increase the refractive index of a certain zone of the substrate
Figure 13 shows the classification of optical waveguides based on the number of dimen-sions in which the light rays are confined In planar waveguides the confinement of light takes place in a single direction and so the propagating light will diffract in the plane of the core In contrast in the case of channel waveguides shown in Figure 13b the confinement of light takes place in two directions and thus diffraction is avoided forcing the light propagation to occur only along the main axis of the structure There also exist structures that are often called photonic crystals that confine light in three dimensions as revealed from Figure 13c Of course the light confinement in this case is based on Bragg reflection Photonic crystals have very interesting properties and their use has been proposed in several devices such as wave-guide bends drop filters couplers and resonators [3]
Classification of optical waveguides according to the materials and refractive index distributions results in various optical waveguide structures such as step index fiber graded index fiber glass waveguide and semiconductor waveguides Figure 14a shows the simplest form of step index waveguide that is formed by a homogenous cylindrical core with constant
(a) (b) (c)
Figure 13 Common waveguide geometries based on light confinement (a) planar waveguide (b) rectangular channel waveguide and (c) photonic crystals
Refractiveindex
Refractiveindex
(a) (b)
Rad
ial d
ista
nce
Rad
ial d
ista
nce
claddingcladding
Core Core
Figure 14 Classification of optical waveguide based on the refractive index distributions (a) step‐index optical fiber and (b) graded‐index optical fiber
6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

6 Computational Liquid Crystal Photonics
refractive index surround by cylindrical cladding of a different lower index Figure 14b shows the graded index planar waveguide where the refractive index of the core varies as a function of the radial distance [4]
13 Maxwellrsquos Equations
Maxwellrsquos equations are used to describe the electric and magnetic fields produced from varying distributions of electric charges and currents In addition they can explain the varia-tion of the electric and magnetic fields with time There are four Maxwellrsquos equations for the electric and magnetic field formulations Two describe the variation of the fields in space due to sources as introduced by Gaussrsquos law and Gaussrsquos law for magnetism and the other two explain the circulation of the fields around their respective sources In this regard the magnetic field moves around electric currents and time varying electric fields as described by Ampegraverersquos law as well as Maxwellrsquos addition On the other hand the electric field circulates around time varying magnetic fields as described by Faradayrsquos law Maxwellrsquos equations can be repre-sented in differential or integral form as shown in Table 11 The integral forms of the curl equations can be derived from the differential forms by application of Stokesrsquo theorem
where E is the electric field amplitude (Vm) H is the magnetic field amplitude (Am) D is the electric flux density (Cm2) B is the magnetic flux density (T) J is the current density (Am2) ρ is the charge density (Cm3) and Q is the charge (C) It is worth noting that the flux densities D and B are related to the field amplitudes E and H for linear and isotropic media by the following relations
B H (15)
D E (16)
J E (17)
Here ε = εoε
r is the electric permittivity (Fm) of the medium μ = μ
oμ
r is the magnetic
permeability of the medium (Hm) σ is the electric conductivity εr is the relative dielectric
constant εo = 8854 times 10minus12 Fm is the permittivity of free space and μ
o = 4π times 10minus7 Hm is the
permeability of free space
Table 11 The differential and integral forms of Maxwellrsquos equations
Differential form Integral form
EB
tE dl
tB dS
loop area
(11)
H JD
tH dl J dS
tD dS
loop area area
(12)
B 0surface
B dS 0
(13)
Dsurface
enclosedD dS Q
(14)
Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Principles of Waveguides 7
14 The Wave Equation and Its Solutions
The electromagnetic wave equation can be derived from Maxwellrsquos equations [2] Assuming that we have a source free (ρ = 0 J = 0) linear (ε and μ are independent of E and H) and isotropic medium This can be obtained at high frequencies (f gt 1013 Hz) where the electromagnetic energy does not originate from free charge and current However the optical energy is produced from electric or magnetic dipoles formed by atoms and molecules undergoing transitions These sources are included in Maxwellrsquos equations by the bulk per-meability and permittivity constants Therefore Maxwellrsquos equations can be rewritten in the following forms
E
B
t (18)
H
D
t (19)
B 0 (110)
D 0 (111)
The resultant four equations can completely describe the electromagnetic field in time and position It is revealed from Eqs (18) and (19) that Maxwellrsquos equations are coupled with first‐order differential equations Therefore it is difficult to apply these equations when solving boundary‐value problems This problem can be solved by decoupling the first‐order equations and hence the wave equation can be obtained The wave equation is a second‐order differential equation which is useful for solving waveguide problems To decouple Eqs (18) and (19) the curl of both sides of Eq (18) is taken as follows
E
B
t
H
t (112)
If μ(r t) is independent of time and position Eq (112) becomes thus
E
H
t (113)
Since the functions are continuous Eq (113) can be rewritten as follows
E
tH (114)
Substituting Eq (19) into Eq (114) and assuming ε is time invariant we obtain the following relation
E
t
D
t
E
t
2
2 (115)
8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

8 Computational Liquid Crystal Photonics
The resultant equation is a second‐order differential equation with operator and with only the electric field E as one variable By applying the vector identity
E E E2 (116)
where the 2 operator in Eq (116) is the vector Laplacian operator that acts on the E vector [2] The vector Laplacian can be written in terms of the scalar Laplacian for a rectangular coordinate system as given by
2 2 2 2E E x E y E zx y z
(117)
where x y z and are the unit vectors along the three axes Additionally the scalar 2rsquos on the
right‐hand side of Eq (117) can be expressed in Cartesian coordinates
22 2 2x y z
(118)
In order to obtain E Eq (111) can be used as follows
E E E 0 (119)
As a result E can be obtained as follows
E E (120)
Substituting Eqs (116) and (120) into Eq (115) results in
22
2E
E
tE (121)
If there is no gradient in the permittivity of the medium the right‐hand side of Eq (121) will be zero Actually for most waveguides this term is very small and can be neglected simplifying Eq (121) to
2
2
20E
E
t (122)
Equation (122) is the time‐dependent vector Helmholtz equation or simply the wave equation A similar wave equation can be obtained as a function of the magnetic field by starting from Eq (19)
2
2
20H
H
t (123)
Equations (122) and (123) are the equations of propagation of electromagnetic waves through the medium with velocity u
u
1 (124)
Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Principles of Waveguides 9
It is worth noting that each of the electric and magnetic field vectors in Eqs (123) and (124) has three scalar components Consequently six scalar equations for E
x E
y E
z H
x H
y
and Hz can be obtained Therefore the scalar wave equation can be rewritten as follows
2
2
2
2
10
u t (125)
Here Ψ is one of the orthogonal components of the wave equations The separation of vari-ables technique can be used to have a valid solution [2]
r t r t jk r j t o exp exp (126)
Here Ψo is the amplitude k is the separation constant which is well known as the wave vector
(radm) and ω is the angular frequency of the wave (rads) The wave vector k will be used as a primary variable in most waveguide calculations The magnitude of the wave vector that points in the propagation direction of a plane wave can be expressed as follows
k (127)
If the wave propagates along the z‐axis the propagation direction can be in the forward direction along the +z‐axis with exponential term exp (jωt minus jkz) [2] However the propagation will be in the backward direction with exp(jωt + jkz) Figure 15 shows the real part of the spatial component of a plane wave traveling in the z direction z jkzo exp The amplitude of the wave at the first peak and the adjacent peak separated by a wavelength are equal such that
e e e ejkz jk z jkz jk1 1 1 (128)
Therefore e jk 1 and hence kλ = 2π which results in
k
2 (129)
15 Boundary Conditions
The waveguide in which the light is propagated is usually characterized by its conductivity σ permittivity ε and permeability μ If these parameters are independent of direction the material will be isotropic otherwise it will be anisotropic Additionally the material is
Am
plitu
de
z1z
λ
Figure 15 A traveling wave along the z‐axis
10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

10 Computational Liquid Crystal Photonics
Medium 2
a
Medium 1
σ2 ε2 μ2
σ1 ε1 μ1
⁀
Figure 16 Interface between two mediums
homogeneous if σ ε and μ are not functions of space variables otherwise it is inhomoge-neous Further the waveguide is linear if σ ε and μ are not affected by the electric and magnetic fields otherwise it is nonlinear The electromagnetic wave usually propagates through the high index material surrounded by the lower index one Therefore the boundary conditions between the two media should be taken into consideration Figure 16 shows the interface between two different materials 1 and 2 with the corresponding characteristics (σ
1
ε1 μ
1) and (σ
2 ε
2 μ
2) respectively The following boundary conditions at the interface [3] can
be obtained from the integral form of Maxwellrsquos equations with no sources (ρ J = 0)
a E Et t2 1 0 (130)
a H Ht t2 1 0 (131)
a B Bn n2 1 0 (132)
a D Dn n2 1 0 (133)
Here a is a unit vector normal to the interface between medium 1 and medium 2 and subscripts t and n refer to tangent and normal components of the fields It is revealed from Eqs (130) and (131) that the tangential components of E and H are continuous across the boundary In addition the normal components of B and D are continuous through the interface as shown in Eqs (132) and (133) respectively
16 Phase and Group Velocity
161 Phase Velocity
The propagation velocity of the electromagnetic waves is characterized by the phase velocity and the group velocity Consider a traveling sinusoidal electromagnetic wave in the z direction A point on one crest of the wave with specific phase must move at specific velocity to stay on the crest such that [5]
e j kz t constant (134)
This can be obtained if (kz minus ωt) = constant and hence z(t) must satisfy the following
z t
t
kconstant (135)
Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies

Principles of Waveguides 11
The phase velocity v(t) = vp can be obtained by differentiating z(t) with respect to time
as follows
dz
dt kvp (136)
Therefore the phase velocity vp is a function of the angular frequency k and the
magnitude of the wave vector Then the phase velocity can be rewritten in the following form
vp
1 (137)
162 Group Velocity
The group velocity vg [5] is used to describe the propagation speed of a light pulse The group
velocity can be expressed by studying the superposition of two waves of equal amplitude Eo
but with different frequencies ω1 = ω + Δω and ω
2 = ω minus Δω Additionally the corresponding
wave vectors will be k1 = k + Δk k
2 = k minus Δk respectively The superposition between the two
waves can be expressed as follows
E E E E t k k z t k k zt 1 2 o cos cos (138)
The resultant electric field can be rewritten as follows
E E t kz t kzt 2 o cos cos (139)
Therefore a temporal beat at frequency Δω and a spatial beat with period Δk is obtained as shown in Figure 17 The envelope of the amplitude [2 5] can be described by the cos(Δωt minus Δkz) term and has a velocity equal to group the velocity v
g
The group velocity can be obtained using the same procedure used in the calculation of the phase velocity A point attached to the crest of the envelope should move with a given speed to stay on the crest of the envelope and hence the phase (Δωt minus Δkz) is constant
Therefore z(t) can be expressed as follows
z t
t
kconstant (140)
Amplitude envelope
Am
plitu
de
Group velocity Vg
Figure 17 The superposition of two waves of different frequencies