Embed Size (px)
Citation preview

© 2018 IEEE
Proceedings of the 33rd Applied Power Electronics Conference and Exposition (APEC 2018), San Antonio, TX, USA, March 4-8, 2018
Three-Phase Buck-Boost Y-Inverter with Wide DC Input Voltage Range
M. Antivachis,D. Bortis,L. Schrittwieser,J. W. Kolar
Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.

Three-Phase Buck-Boost Y-Inverter with Wide DCInput Voltage Range
Michael Antivachis, Dominik Bortis, Lukas Schrittwieser and Johann W. KolarPower Electronic Systems Laboratory
ETH Zurich, [email protected]
Abstract—Driven by the needs of the continuously growing fuel-cell industry, a promising three-phase inverter topology, the Y-inverter, is proposed, which comprises three identical buck-boostDC/DC converter modules connected to a common star point.Each module constitutes a phase-leg and can be operated insimilar fashion to conventional DC/DC converters, independentof the remaining two phases. Therefore, a straightforward andsimple operation is possible. In addition, the Y-inverter allows forcontinuous output AC voltage waveforms, eliminating the needof additional AC-side filtering. Due to the buck-boost nature ofeach phase leg, the AC voltages can be higher or lower thanthe DC input voltage. This is an essential feature for fuel-cellapplications, which suffer from a wide DC input voltage range.This paper details the operating principle of the Y-inverter,outlines the control system design and verifies its functionalityby means of simulation results. The Y-inverter performance interms of efficiency η and power density ρ is briefly analyzed bymeans of a multi-objective optimization and a converter design isselected which is compared to a benchmark system realized witha conventional inverter solution.
Index Terms—High-speed drives, Y-inverter, Fuel-cell applica-tion, Wide input and output voltage range, Control system
I. INTRODUCTION
As the proliferation of industrial and automotive fuel-cell(FC) applications continues, the demand for highly efficientconverters in a small form factor is intensified [1]. Typically,the oxygen needed for the fuel-cell operation, is provided bya compressor unit with a power rating of approximately 10%
of the FC power. The compressor is driven by an auxiliarymotor drive system which is directly powered from the FC(cf. Fig. 1(a)). Fuel-cells exhibit a wide voltage range and arecharacterized by a negative voltage coefficient, meaning thattheir voltage is dropping as the extracted current is increasing.This poses challenges for the design of the inverter powerelectronics which must be dimensioned for both the highblocking voltage under low power, as well as the high currentsunder full power operation. Those two design constraints arecontradictory and inevitably lead to oversized converters withinferior performance. At the same time the EMI emissionregulations, with respect to the AC output, are becomingprogressively more stringent. For this reason, an AC-side LC
(b)
(a)
SM3
AC
DC
Converter Motor
Compressed Air
b
a
cn
0 100
0
100
Power (%)
Voltag
e (%
)
Fuel-Cell Compressor
H2
L
C
abc
vin
(c)
abc
L
C
m
Phase a
Bridge A Bridge B
vin
vin
++
+
CDC
CDC
T1
T1
T2
T3
T4
T1
T2
T2
CDC
‘
‘L
‘
‘Fig. 1: In (a) a typical 10 kW fuel-cell (FC) application is depicted.The oxygen needed for the FC operation is provided by a high-speed compressor controlled by a FC attached motor drive. In (b) theconventional inverter solution, with a DC/DC boost converter followedby a voltage source inverter (boost VSI) is depicted, while in (c) theproposed three-phase Y-inverter featuring three identical buck-boostphase modules is illustrated.
filter structure usually follows the inverter in order to ensuresinusoidal high quality output currents and voltages. The bulkyinductive components of the filter further add to the electronicsvolume and losses.
There has been extensive research towards inverter topologiesthat counterbalance the inherent limitations of a varying DCinput voltage. A popular solution is a DC/DC boost convertercascaded with a voltage source inverter (boost VSI) whichis depicted in Fig. 1(b) [2]. The boost converter generates astable, easily controllable, high DC-link voltage that mitigatesthe current stress of the inverter under full power operation.However, increased number of inductive components and semi-conductor losses originating from the DC/DC stage degrade

Uo
0
-Uoˆ
Io
2Io
-2Io
0
-Io
1
0.5
0
Uo
2Uo
0
Uin
Mac
hin
e V
olta
ge
TimeTime
Duty
Cycl
esC
urr
ent
Ter
min
al V
olta
ge
BuckBoost BuckBoost
Buck
Boo
st
uan ubn ucn
uamUin
uoff
0 To/2 To
Time
0 To/2 To(b)
(c)
(d)
(e)
(a.ii)
(a.iii)
a
L
C
C
iLa
ia
uamuin
T1 T3
T4T2
a
L iLa
ia
vamuin
T1 T3
T4T2
(a.i)
abc
uinL
A B
iLa
iaiin
uam
T1 T3
T4T2
C
BoostBridge
BuckBridge
m
m
m
iLa
ia
dA
dB
Time
0 To/2 To
2∆IL,Pk
0 To/2 To
+
+
+
Fig. 2: Operating principle of the Y-inverter. In (a.i) one of the three identical bridge-leg modules comprised in the Y-inverter is depicted. In(a.ii) and (a.iii) the boost and buck operation are highlighted respectively. In (b) the three AC motor voltages voltages are illustrated while in(c) the corresponding strictly positive terminal inverter output voltage of phase a is depicted. The required buck dA and boost dB duty cyclesare presented in (d) and the inductor current iLa is plotted on top of the motor AC current ia in (e).
the overall system performance. Alternative single conversionstage topologies, such as the Z-source inverter, have gainedsignificant interest over the past decade [3] [4]. The Z-sourceinverter utilizes a unique impedance network and shoot-throughzero states to boost the voltage of the capacitors of the Z-sourcenetwork, but suffers from increased voltage stress under highboost ratios.
In response to these shortcomings, an inverter module, ref-erenced to as Y-inverter (cf. Fig. 1(c)), is presented withinthis paper. Based on the well established idea of realizing athree-phase inverter by connecting three DC/DC converters toa common star point [5]–[10], three identical phase modulesare attached to the negative DC-rail m. The Y-inverter benefitsfrom three key features. Firstly, each phase-leg can employsimple controllers similar to conventional DC/DC converters.Secondly, the Y-inverter provides a continuous AC outputvoltage which eliminates the need of a dedicated output filter.Finally, due to its buck-boost characteristic, the DC inputvoltage can be higher or lower than the AC voltage.
In this paper, in a first step the operating principle of theY-inverter is explained in Sec. II. An appropriate controlscheme in introduced in Sec. III while the seamless anduncomplicated operation of the Y-inverter is verified by means
TABLE I: Y-inverter fundamental quantities.
Parameter Buck Operation Boost Operationuam ≤ Uin ≥ Uin
dAuam(t)Uin∈ [0...1] 1
dB 1 Uinuam(t)
∈ [0...1]
Switch signals T1 on : dA > Car T1 onT2 on : dA < Car T2 offT3 on T3 on : dB > CarT4 off T4 on : dB < Car
uA dAUin Uin
uB uam dBuam
uam dAUin1dBUin
Low freq. ind. ia1dBia
current 〈iLa〉∆IL,Pk
12dA(1−dA)Uin
fsL12dB(1−dB)uam
fsL
of simulation results. Sec. IV is dedicated to the selection of thehardware demonstrator and the critical design aspects. Finally,the conclusions are drawn in Sec. V.
II. OPERATION PRINCIPLE
The Y-inverter, presented in Fig. 1(c), consists of threeidentical phase-legs: Each phase is comprised of two halfbridges connected to the opposite terminals of an inductor L,and an output capacitance C placed between the AC outputterminal a, b, c and the negative DC-rail m, which forms a

Umˆ
2Uo
0
Outp
ut
Voltag
e u
am
Current Ripple ∆IPk
∆IPk Uin(uam-Uin)
2uamL fs
=
∆IPk uam(Uin-uam)
2UinL fs
=Umˆ
2Uo
0
Uin
Vol
tage
uam
Time0 To/2 To
ubm ucm
Uin
uoff
Uo
Umˆ
2Uo
0
Uin
Time0 To/2 To
Voltage Stress Reduction Voltage Stress Reduction
uam ubm ucm
Uinuoff
Uo
Umˆ
2Uo
0
Uin
Time0 To/2 To
uam ubm ucm
Uin
uoff
Clamping
Uo
(a.ii) (a.iii) (b)(a.i)
Buck
Boo
st
Uin
Fig. 3: Possible Y-inverter modulation schemes. In (a.i) the standard modulation is depicted where a constant offset uoff = Uo is added tothe AC motor voltage ua in order to form the strictly positive terminal inverter voltage uam. In (a.ii) a third harmonic pattern is superimposedto the offset voltage uoff =
√3
2Uo +
16Uo sin(3ωt) resulting in the same motor AC line-to-line voltage but with 13% lower voltage stress on
the semiconductor devices (for the same modulation depth). In (a.iii) discontinuous modulation scheme applied to of the Y-inverter wherethe phase-leg with the most negative voltage is clamped to zero. Thereby, the switching losses are reduced up to 33%. Finally in (b) thedependency of the inductor current ripple over the full output voltage range is analytically derived.
common star Y-point among the three phases. The potential ofeach AC inverter output is strictly defined with respect to m andis independent of the remaining two phases. Each phase can beoperated autonomously, as an equivalent single-phase converter.This feature significantly simplifies the converter analysis andreduces the control effort.
The focus is now shifted on phase a (cf. Fig. 2(a.i)), whosestructure is equivalent to a non-isolated buck-boost DC/DCconverter [11]. The left half-bridge (T1, T2) is dedicated to buckconverter operation (cf. Fig. 2(a.iii)) while the right hand sidebridge (T3, T4) is exclusively used for boost operation (cf. Fig.2(a.ii)). The buck and boost bridges are operated in a mutuallyexclusive fashion, meaning that only one of the two half-bridgesis pulse width modulated (PWM) at a time, while the top sideswitch of the second bridge is clamped to an active on-state.The duty cycles dA and dB control the high side switch of thebuck and boost bridge-leg respectively. In buck operation, theduty cycle of the buck bridge-leg dA ranges from 0 to 1, whilethe duty cycle of the boost bridge-leg dB is kept to 1. Hence, thetopology reduces to a simple buck converter (cf. Fig. 2(a.iii))that yields a controllable output voltage uam = dAUin ≤ Uin.On the other hand, during boost operation, the duty cycle of theboost bridge-leg dB ranges from 0 to 1, while the duty cycle ofthe buck bridge-leg dA is maintained at 1, i.e. the switch T1 ispermanently on (cf. Fig. 2(a.ii)). In this case, the topology isequivalent to a boost converter where uam = 1
dBUin > Uin. The
important system quantities are summarized in Tab. I for buckand boost operation.
Returning to the three-phase consideration, a sinusoidal ACvoltage uan = Uo sin(ωt) with respect to the load open starconnection n must be formed (cf. Fig. 2(b)). This voltagecannot be directly reproduced by the phase leg a, since eachphase leg is comprised in a bidirectional DC/DC converter with
strictly positive output voltage, uam > 0. Instead, a sinusoidalvoltage with an offset uoff = Uo, such that it remains alwayspositive, can be generated, uam = Uo sin(ωt) + uoff (cf. Fig.2(c)). If this concept is extended to the remaining phases b andc, then three sinusoidal voltages with the same offset voltageare formed (with respect to the Y-inverter star point m). TheDC offset uoff = Uo clearly constitutes a common mode (CM)voltage component, and thus cannot drive any current in anopen star three phase load
uCM =uam + ubm + ucm
3= Uo
uan = uam − uCM = Uo sin(ωt).(1)
The strictly positive, sinusoidally modulated, phase voltagesui,m, i ∈ a, b, c, drive purely sinusoidal load currents and hencevoltages ui,n, i ∈ a, b, c, across the load. Depending on theinstantaneous voltage reference u∗am(t), the inverter transitionsseamlessly between buck and boost operation: When u∗am(t)
is lower that the DC-link voltage Uin then the Y-inverter isoperated in buck regime, while boost regime is employed whenu∗am(t) > Uin.
For high switching to fundamental frequency ratios ( fsfo 1),
the dynamics of the DC/DC phase-leg converter are orders ofmagnitude faster than the frequency of the sinusoidal currentsand voltages. Thus, each point of the slowly changing funda-mental voltage uam can be considered as a steady state operatingpoint from the DC/DC converter perspective. According to thislocal static model of the DC/DC converter, the duty cycles dA
and dB can be calculated by considering the input to outputvoltage ratios during buck and boost operating regime
dA = min[1,uam(t)
Uin
]dB = min
[1,
Uin
uam(t)
].
(2)

(ii)Output Voltage
Control
(i)Motor
dq control
(iii)Inductor Current
Control
(iv)‘‘Democratic’’ Buck-Boost
Modulator
dB iLa
*iLa ∆iLa*ua
*ub
*uc
*uam
*uoff uam
RV RI
∆uam
ia
*iCa*ioa uLa
*
+++++ -+ -
PositionSensor
Buck
Boost
dAPWM
PWMdB
vaε
uam
*uA
0
Uin
Uin
+ +
+-*uB
0
uam
uamUin
iLa
iavam
T1
T3T4
T2
A
B
C
m
Uin
iin
+
SM3
n
L
iCaioa
*ω
ω
∆ω
+ -
ia ib ic εω
MotorControldq-Axis
PLL
Fig. 4: Y-inverter control block diagram. In (i) the cascaded motor speed ω current ia controller is illustrated that provides the three machinereference terminal voltages u∗a , u∗b , u
∗c which must be generated by the converter. The cascaded terminal voltage (external loop) inductor current
(internal loop) controller employed by each phase module of the Y-inverter is illustrated in (ii),(iii) respectively. The inductor reference voltageu∗La derived from the cascaded control structure is translated into the corresponding buck and boost bridge-leg duty cycles dA, dB by the“democratic” buck-boost modulator shown in (iv).
The resulting duty cycle signals are visualized in Fig. 2(d).Due to the switched operation of the buck or boost half-bridge, a high frequency voltage is applied across the phase-leginductor L, which generates a current ripple with amplitude∆IL,Pk (cf. Tab. I). The current ripple depends on both theinstantaneous terminal voltage uam as well as on the operatingregime (i.e. buck or boost operation) as visualized in Fig.3(b). The output current of the boost half-bridge (T3, T4) isfiltered by the terminal capacitor C resulting in a high quality,predominantly sinusoidal load voltage uan and eliminating theneed for additional filtering on the AC load side.
A. Modulation Techniques
The offset voltage uoff, which is added to the AC motorvoltage ua in order to maintain the terminal inverter voltageuam strictly positive, is now analyzed in more detail. In thecourse of the Y-inverter operating principle introduction (cf.Fig. 3(a.i)) the offset voltage was selected to be constantuoff = Uo however, this is not obligatory. The offset volt-age, which is equivalent to the injected common mode (CM)voltage of a three-phase system uoff ≡ uCM, represents anessential degree of freedom which can benefit the inverterperformance [12], [13]. For example the superposition of asinusoidal third harmonic component on the constant offsetvoltage uoff =
√32 Uo + 1
6 Uo sin(3ωt) is reminiscent of the thirdharmonic modulation (THM) of two-level three-phase inverters[14]. Such an approach allows for better utilization of thefuel-cell DC voltage. More precisely the same output voltagecan be generated as in the standard modulation case where
uoff = Uo, but with approximately 13% lower voltage stress ofthe semiconductor devices as highlighted in Fig. 3(a.ii). Analternative approach described in literature as discontinuousmodulation (DCM) [15], [16] can also be applied to the Y-inverter: The phase with the most negative voltage is clampedto the negative DC rail m (ui,m = 0, i ∈ a, b, c), for onethird of the fundamental period Ts
3 . Accordingly, the clampedphase-leg exhibits no switched operation, leading to a totalreduction of the switching losses of up to 33%. The beneficial13% semiconductor voltage stress reduction also applies for thediscontinuous modulation. The described modulation scheme isvisualized in Fig. 3(a.iii). The switching losses can be furtherreduced if zero voltage switching (ZVS) is achieved: To thisend a triangular current modulation (TCM) can be employed[17], [18] where the inductor current iLa has a negative offset atthe beginning and at the end of each switching period, enablingsoft switching resonant transitions. A comprehensive analysisof optimal CM modulation techniques (OCMM) suitable forthree-phase modular systems referenced to a common star pointm can be found in [19].
III. CONTROL SYSTEM DESIGN
The functionality of the Y-inverter is further evaluated withinthe context of an auxiliary fuel-cell high-speed motor drive. Anindustry solution example of a high-speed motor drive, requiredpower of 1 kW and rotational motor speed of 300 krpm [20],[21]. The specifications of the motor drive are recapitulatedin Tab. II. A standard cascaded motor speed-phase currentcontroller is required, referenced to the dq-axis frame, in order

0 0.5 1
d
0
1
0 0.5 1
Voltage
(V)
0
50
-50
Curr
ent
(A)
0
25
-25
Curr
ent
(A)
0
25
-25
1
Voltage
(V)
40
80
0
(a) (b) (c) (d)
BuckBoost BuckBoost
Phase-Leg a
(ms)(ms) (ms) (ms)
DC-Input AC-Load
0 0.5
Curr
ent
(A)
0
25
-25
dAdB
uam van
iLa
iin
ia
Uin
0 0.5 1
Fig. 5: Simulation results of the Y-inverter driving a high-speed motor. In (a) the input current drawn from the DC-link is shown. In (b) thebuck and boost half-bridge duty cycles are illustrated, while in (c) the inductor current and the terminal voltage are depicted. Finally in (d)the output AC motor voltage and current of phase a are presented.
to drive the machine. As an input the motor controller receivesthe machine speed ω, angle ε and terminal currents ia, ib, ic andin return yields the reference machine terminal AC voltagesu∗a , u
∗b , u∗c which must be generated by the inverter (cf. Fig.
4(i)).
Each phase-leg is controlled independently ensuring thatthe output phase voltages ua, ub, uc follow their sinusoidalreferences u∗a , u
∗b , u∗c . The controller block diagram visualized
in Fig. 4 for phase a is comprised of a cascaded output voltageua inductor current iLa controller. The splitting of the inductorcurrent and the terminal voltage control, decouples the two statevariables ua, iLa and hence allows for higher total bandwidthand superior dynamic performance. Firstly, the predeterminedoffset voltage uoff is added to the motor terminal voltagereference u∗a in order to form the strictly positive inverteroutput voltage reference u∗am. The output voltage error ∆uam isprocessed by a PI controller RV (external output voltage controlloop) and consequently added to the appropriate feed-forwardterms, yielding the inductor current reference signal i∗La (cf. Fig.4(ii)). Afterwards, the inductor current error ∆iLa is passed
TABLE II: Fuel-cell powered high-speed motor drive specifications.
Parameter ValueMotorSpeed n 300 krpmInduced voltage (EMF) 30 VRMS (Phase)Power P 1 kWInductance Lm 32.8 µHResistance Rm 91 mΩFuel-cellOutput power PFC 10 kWCompressor power P 1 kWFuel-cell voltage VFC 40...120V
through another PI controller RI (internal inductor currentcontrol loop) yielding the required voltage across the inductoru∗La (cf. Fig. 4(iii)). More details of the external voltage andthe internal current controller design are presented in TabIII. There, the transfer functions (TF) of the correspondingplants and controllers are shown, while the selected crossoverfrequencies and proportional gains are specified.
For the buck-boost modulator block there are several optionshow the required voltage across the inductor uLa = uA − uB
can be generated. If for example a positive voltage u∗La > 0
is needed in order to increase the inductor current iLa, it caneither be achieved by increasing the voltage uA of bridge-legA (i.e. increase dA) or by decreasing the voltage uB of bridge-leg B (i.e. decrease dB). The translation of the inductor voltageuLa into the buck and boost bridge voltages uA, uB and hencethe duty cycles dA, dB is performed by the modulator (cf. Fig.4(iv)). The modulator follows a “democratic” strategy, in thesense that the inductor voltage formation burden is equallyshared between the buck and boost bridges. Namely, if the Y-inverter is operated in buck regime (cf. Fig. 2(a.iii)), meaningthat uam + u∗La ≤ Uin, the limiter [0, uam] of the boost branchindicated in Fig. 4(iv) automatically saturates the duty cycle dB
TABLE III: Cascaded terminal voltage-inductor current controlleranalysis. The associated transfer functions (TF) are specified, whileguidelines regarding the selection of the PI controllers crossoverfrequency and proportional gains are provided.
Controller Type Voltage CurrentPlant TF GV = uam
iCa= 1
sC GI = iLauLa
= 1sL
Controller TF RV = KV1+sTVsTV
RI = KI1+sTIsTI
Crossover frequency fV = fI10 = fs
100 fI = fs10
Proportional gain KV = 2πfVC KI = 2πfIL

(b.i)(a) (b.ii)0 2 4 6 8 10 12
Power Density ρ (kW/dm3)
Effic
iency
η (
%)
94
95
96
97
98 SelectedDesign
SelectedPower Density
PerformanceImprovement
Y-Inverter
BoostVSI
Other(5.00 W)
Capacitor(0.42 W)
Inductor(1.36 W)
Buck Switch (14.89 W)
Boost Switch(11.78 W)
Other(0.019 dm3)
Capacitor(0.005 dm3)
Inductor(0.109 dm3)
Buck Switch(0.023 dm3)
Boost Switch(0.020 dm3)
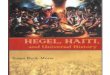
Fig. 6: In (a) the efficiency (η) power density (ρ) Pareto optimization results for the Y-inverter are compared against the performance ofthe conventional cascaded boost VSI topology shown in Fig. 1(b). Two benchmark designs are indicated on the η − ρ performance spacecorresponding to the conventional boost VSI and the Y-inverter concepts in order to highlight the performance difference. The specificationsof those designs are given in Tab. IV. The break-down of the volume and the losses corresponding to the Y-inverter is visualized in (b.i) and(b.ii) respectively.
of the boost bridge-leg to 1, while the duty cycle dA of the buckbridge-leg can vary freely in [0, 1] interval. Thereby the inductorcurrent is controlled exclusively by means of bridge-leg A. Onthe contrary during boost operation, where uam +u∗La > Uin (cf.Fig. 2(a.ii)), bridge-leg B (dB) is responsible for controllingthe inductor current while dA is automatically clamped at 1by the limiter of the buck branch shown in Fig. 4(iv). Thetransition between the buck and the boost modulation branchesis seamless.
In order to validate the proposed control strategy, a co-simulation is built within a Matlab-Simulink framework em-ploying the Y-inverter, a static machine model and a time-discrete version of the controller shown in Fig. 4. The mainY-inverter waveforms, extracted from the simulation, are plottedin Fig. 5.
IV. MULTI-OBJECTIVE OPTIMIZATION
In order to quantify the Y-inverter performance in terms ofefficiency η and power density ρ, a multi-objective optimizationroutine is performed. The extracted results are then comparedagainst the respective performance of a conventional cascadedboost VSI (cf. Fig. 1(b)) designed for the same specifications ofTab. II. There are multiple degrees of freedom in the designof the power electronics system: different abstract electricalparameters such as switching frequency and passive compo-nent values [22] can be selected, while numerous componentphysical implementation options exist for inductive components(e.g. core shape, core material, winding type) [23] and semicon-ductor devices (e.g. chip area, technology) [24], [25]. For eachpossible converter design, the volume and loss contributions ofall the employed components are added yielding the efficiency
and power density of the total converter system. By iteratingthis process for all the possible component combinations, thecomplete design space is mapped into the two dimensionalperformance space η, ρ. Based on the obtained performancespace the Pareto-optimal designs can be identified and theassociated trade-offs can be determined. Details on the modelsemployed in the optimization and the optimization algorithmare omitted here for the sake of brevity.
The η − ρ Pareto limits of the two converter options (i.e.boost VSI and Y-inverter) are depicted in Fig. 6(a), wherecertain performance trends can be identified. The boost VSIexhibits an acceptable efficiency of 95.5%, since the boostDC/DC converter and the DC/AC inverter stages are decoupledand can be operated in an optimal fashion. However, theboost VSI solution quickly reaches a power density thresholdat 6 kW/dm3 due to the volume contribution related to theDC/DC stage. At the nominal operating point, where the booststage must step-up the FC voltage to the greatest degree,especially the boost inductor is exposed to large voltage-timeareas and hence is rather bulky. Moreover, the boost typeDC/DC converter provides a DC voltage which is above orequal to the maximum FC voltage with a twofold effect onthe system: Power semiconductors featuring a high blockingvoltage must be employed for the inverter stage with inferiorfigures of merit and hence higher losses. A motor with EMFcompatible with the respective high DC link voltage must beemployed, thus only a high voltage motor (i.e. 50 VRMS phasevoltage) can be driven by the boost VSI topology.
The Y-inverter breaks through the efficiency barriers of tradi-tional systems, i.e. reaches 97.2% efficiency, while maintaininga very high power density of 10 kW/dm3, because it allows for

TABLE IV: Specifications of the Y-inverter hardware prototype andthe boost VSI benchmark design that are highlighted in Fig. 6(a). Thecurrent stresses of the main converter components, i.e. semiconductordevices, inductors and DC capacitors are provided for the nominalpower operating point of P = 1kW. The notation of the differentsystem components can be found in Fig. 1(b),(c) for the boost VSIand the Y-inverter respectively.
Converter Topology Boost VSI Y-InverterDC/AC stagefs 300 kHz 450 kHzEMFPh,RMS 50 V 30 VIT1,RMS 7.9 A 11.1 AIT2,RMS 7.9 A 9.5 AIT3,RMS - 14.2 AIT4,RMS - 3.2 AL 9.7 µH 3 µHIL,Pk 18.2 A 28.5 AC 3.8 µF 4.8 µFCDC 11.3 µF 23 µFICDC,RMS 3.9 A 4.9 ADC/DC Stagefs 300 kHz -IT′
1,RMS 11.9 A -IT′
2,RMS 12.2 A -L
′23.1 µH -
IL′ ,Pk 19.2 A -C
′
DC 4.6 µF -IC′
DC,RMS 1.3 A -Total ConverterSemiconductor nr. 8 12Inductor nr. 4 3DC capacitor nr. 2 1ρ 6 kW/dm3 9.5 kW/dm3
η 95.5% 97.2%
a single-stage energy transfer (no DC/DC interface converter)and hence contains a minimum number of inductive compo-nents. Moreover, only one half-bridge per phase is switched,while the second half-bridge is clamped, a fact that limits thepower semiconductor losses. On the other hand, compared tothe conventional boost VSI converter, the Y-inverter offers moreflexibility in the sense that it can be operated with both alow or a high voltage motor as a result of its inherent buck-boost capability. Therefore, the motor EMF is considered as adegree of freedom in the optimization procedure. A motor with30 VRMS phase voltage is best suited for the Y-inverter.
Based on the optimization results, a prototype design witha power density of ρ = 9.5 kW/dm3 (accounting only for theboxed volume of components) and a calculated efficiency ofη = 97.2% is selected. The corresponding breakdown of itsvolume and losses is presented in Fig. 6(b.i)-(b.ii). The detailedspecifications and component current stresses of the Y-inverter
c
b
Phase a
PositionSensor
GateDriverOutput
Filter
ControlBoard
(a)
DC Link
115mm
100mm
Generator
PositionSensor
Motor
WaterCooling
(b)
Fig. 7: Y-inverter prototype is presented in (a) and a custom designedultra high-speed motor in (b). The depicted systems will be usedto experimentally evaluate the theoretical considerations in futurepublications.
prototype are provided in Tab. IV and are compared to therespective data of an optimized traditional boost VSI solution.A hardware demonstrator employing the latest generation ofGaN devices is designed (cf. Fig. 7(a)) in order to validate theclaimed performance benefits derived from the Y-inverter. Theachieved hardware prototype power density is lower that thetheoretically calculated values i.e. ρ ' 7 kW/dm3 because ofthe non-ideal placement of the components and the air volumebetween them. The test setup in addition consists of a custom-built 300 krpm motor depicted in Fig. 7(b). The associatedcontrollers described in Sec. III are implemented within adigital signal processor, in order to drive the machine. Themotor angle ε is provided by a hall sensor board that is directlymounted on the machine chassis. Experimental measurementswill be provided in a future publication.
V. CONCLUSIONS
A promising three-phase inverter topology towards highlyefficient low voltage inverters for fuel-cell applications ispresented within this paper. The Y-inverter is comprised ofthree buck-boost DC/DC converters which are connected to acommon star point. The potential of each output AC terminalis strictly defined with respect to the star point, allowing for astraightforward operation of each phase-leg as a conventionalbuck-boost DC/DC converter enabling a wide input and outputvoltage range. The Y-inverter also benefits from an integratedAC output filter hence it provides a smooth sinusoidal voltageto the motor. An appropriate control system is designed andanalyzed while its functionality is verified by simulation resultsfor a high-speed fuel-cell powered motor drive application.Finally the achievable efficiency and power density of the Y-inverter is determined through a comprehensive multi-objective

optimization and is compared against a traditional boost VSIsolution. There, a clear comparative gain of 1.5% efficiency and4 kW/dm3 power density in favor of the Y-inverter is deduced.
VI. ACKNOWLEDGMENT
The authors gratefully acknowledge the financial support bythe CTI (Commission for Technology and Innovation, Switzer-land) and the technical contribution of Celeroton AG.
REFERENCES
[1] Federal ministry for economic affairs and energy, Germany, RenewableEnergy Sources in Figures, 2015.
[2] R. Erickson and L. Colony, “Dc to three phase switched mode converters,”Patent US 4,677,539, 1987.
[3] F. Z. Peng, “Z-source inverter,” IEEE Transactions on Industry Applica-tions, vol. 39, no. 2, pp. 504–510, Mar. 2003.
[4] J. Li, J. Liu, and Z. Liu, “Comparison of z-source inverter and traditionaltwo-stage boost-buck inverter in grid-tied renewable energy generation,”in Proceedings of 6th IEEE International Power Electronics and MotionControl Conference, May. 2009, pp. 1493–1497.
[5] K. D. Ngo, S. Cuk, and R. D. Middlebrook, “A new flyback dc-to-three-phase converter with sinusoidal outputs,” in Proceedings of IEEE PowerElectronics Specialists Conference (PESC), Jun. 1983, pp. 377–388.
[6] B. Farhad and S. Cuk, “A new switched-mode amplifier produces cleanthree phase power,” in Proceedings of 9th International Solid State PowerConversion Conference, 1982, pp. E3.1–E3.15.
[7] R. W. Erickson and D. Maksimovic, Fundamentals of Power Electronics.Kluwer academic publishers, 2001.
[8] S. Mehrnami, S. K. Mazumder, and H. Soni, “Modulation scheme forthree-phase differential-mode inverter,” IEEE Transactions on PowerElectronics, vol. 31, no. 3, pp. 2654–2668, Mar. 2016.
[9] A. Darwish, D. Holliday, S. Ahmed, A. M. Massoud, and B. W. Williams,“A single-stage three-phase inverter based on cuk converters for pvapplications,” IEEE Journal of Emerging and Selected Topics in PowerElectronics, vol. 2, no. 4, pp. 797–807, Dec. 2014.
[10] M. S. Diab, A. Elserougi, A. M. Massoud, A. S. Abdel-Khalik, andS. Ahmed, “A four-switch three-phase sepic-based inverter,” IEEE Trans-actions on Power Electronics, vol. 30, no. 9, pp. 4891–4905, Sept. 2015.
[11] M. Baumann and J. W. Kolar, “A novel control concept for reliableoperation of a three-phase three-switch buck-type unity-power-factorrectifier with integrated boost output stage under heavily unbalancedmains condition,” IEEE Transactions on Industrial Electronics, vol. 52,no. 2, pp. 399–409, Apr. 2005.
[12] J. W. Kolar, H. Ertl, and F. C. Zach, “Influence of the modulation methodon the conduction and switching losses of a pwm converter system,” IEEETransactions on Industry Applications, vol. 27, no. 6, pp. 1063–1075,Nov. 1991.
[13] K. Zhou and D. Wang, “Relationship between space-vector modulationand three-phase carrier-based pwm: a comprehensive analysis,” IEEETransactions on Industrial Electronics, vol. 49, no. 1, pp. 186–196, Feb.2002.
[14] A. M. Hava, S. Sul, R. J. Kerkman, and T. A. Lipo, “Dynamic over-modulation characteristics of triangle intersection pwm methods,” IEEETransactions on Industry Applications, vol. 35, no. 4, pp. 896–907, Jul.1999.
[15] F. Liu, K. Xin, and Y. Liu, “An adaptive discontinuous pulse widthmodulation (dpwm) method for three phase inverter,” in Proceedingsof IEEE Applied Power Electronics Conference and Exposition (APEC),Mar. 2017, pp. 1467–1472.
[16] C. Charumit and V. Kinnares, “Discontinuous svpwm techniques of three-leg vsi-fed balanced two-phase loads for reduced switching losses andcurrent ripple,” IEEE Transactions on Power Electronics, vol. 30, no. 4,pp. 2191–2204, Apr. 2015.
[17] S. Waffler, M. Preindl, and J. W. Kolar, “Multi-objective optimizationand comparative evaluation of si soft-switched and sic hard-switchedautomotive dc-dc converters,” in Proceedings of 35th Annual Conferenceof IEEE Industrial Electronics, Nov. 2009, pp. 3814–3821.
[18] S. Waffler and J. W. Kolar, “A novel low-loss modulation strategy forhigh-power bidirectional buck + boost converters,” IEEE Transactions onPower Electronics, vol. 24, no. 6, pp. 1589–1599, Jun. 2009.
[19] M. Antivachis, D. Bortis, A. Avila, and J. W. Kolar, “New optimalcommon-mode modulation for three-phase inverters with dc-link refer-enced output filter,” IEEE CPSS Transactions on Power Electronics andApplications, 2017.
[20] C. Zwyssig, J. W. Kolar, and S. D. Round, “Megaspeed drive systems:pushing beyond 1 million r/min,” IEEE/ASME Transactions on Mecha-tronics, vol. 14, no. 5, pp. 564–574, Oct. 2009.
[21] A. Looser, T. Baumgartner, C. Zwyssig, and J. W. Kolar, “Analysis andmeasurement of 3d torque and forces for permanent magnet motors withslotless windings,” in Proceedings of IEEE Energy Conversion Congressand Exposition (ECCE USA), Sept. 2010, pp. 3792–3797.
[22] C. B. Barth, I. Moon, Y. Lei, S. Qin, and R. Pilawa-Podgurski, “Ex-perimental evaluation of capacitors for power buffering in single-phasepower converters,” in Proceedings of IEEE Energy Conversion Congressand Exposition (ECCE USA), Sept. 2015, pp. 6269–6276.
[23] R. M. Burkart, H. Uemura, and J. W. Kolar, “Optimal inductor design for3-phase voltage-source pwm converters considering different magneticmaterials and a wide switching frequency range,” in Proceedings ofInternational Power Electronics Conference (IPEC - ECCE ASIA), May.2014, pp. 891–898.
[24] J. A. Anderson, C. Gammeter, L. Schrittwieser, and J. W. Kolar, “Accuratecalorimetric switching loss measurement for 900V 10mΩ sic mosfets,”IEEE Transactions on Power Electronics, vol. 32, no. 12, pp. 8963–8968,Dec. 2017.
[25] X. Li, L. Zhang, S. Guo, Y. Lei, A. Q. Huang, and B. Zhang, “Under-standing switching losses in sic mosfets: toward lossless switching,” inProceedings of 3rd IEEE Workshop on Wide Bandgap Power Devices andApplications (WiPDA), Nov. 2015, pp. 257–262.