Embed Size (px)
Citation preview

Three-dimensional Oil Well Planning in Ultra-deep Water
1Paulo G. de Barros,
1Dinaldo A. Pessoa,
1Pedro J. S. Leite,
1Rodrigo C. Farias,
2Veronica Teichrieb,
1Judith Kelner
1Centro de Informática, Universidade Federal de Pernambuco
2Departamento de Sistemas Computacionais, Escola Politécnica de Pernambuco,
Universidade de Pernambuco
{pgb, dap2, pjsl, rcf3, jk}@cin.ufpe.br, [email protected]
Abstract. This paper presents the Vis-Petro Well Drilling Planner, a tool that
supports the user in the design, execution and personnel training for ultra-
deep water petroleum well construction. Its scope spans from oil platform
selection to marine terrain editing and ocean waves rendering, as well as the
definition of the entire well drilling process. Vis-Petro is also built with a
flexible architecture, allowing the easy exchange among different graphical
libraries or virtual reality interfaces.
1. Introduction
Well planning and design is a very promising application area for Virtual Reality (VR),
since several integrated and interactive three-dimensional (3D) models are involved in
the process and should be precisely and realistically simulated, in order to make possible
their use by petroleum engineers.
This paper presents a computational tool, called Vis-Petro, which supports the
design, execution and personnel training for petroleum well construction, in the scenario
of submarine completion. The tool is composed of a set of modules, namely a platform
objects library, a terrain surface editing module, a reservoir editing module and a
module to define well design project, including pull points, equipments, tools and fluids.
The well design process is a very complex one. Nevertheless, there are already
some solutions for the definition of well paths [1]. The Vis-Petro tool implements a well
path definition model based on circle arcs and straight-line segments. In addition, in
order to enhance the visual quality of the application, the ocean surface simulates deep-
water ocean waves using a composition of well-known techniques [2] [3] [4]. Terrain
editing is also possible by the use of editing points together with adapted image
smoothing algorithms.
This paper intends to describe each of the implemented techniques as well as
highlight the relevance of such tool in the area of oil well planning. Section 2 explains
some basic concepts of the oil well drilling process. Section 3 reviews the current
research being carried out in oil well planning and VR. Section 4 presents the Vis-Petro
Drilling Planner tool, with its 3D interface and flexible editing. Section 5 details the
achieved results until the present moment. Lastly, section 6 gives the conclusion.

2. Well Planning Background
The process of planning an oil well demands large investments on account of the highly
specialized personnel and the specific tools needed for each different drilling situation
[5]. In order to reduce the risk of such an investment, a planning stage is of the utmost
importance. It not only reduces risks of not finding any oil, but it also optimizes the
drilling process, decreasing drilling costs, and therefore maximizing the final well profit.
By demanding the proper analysis of soil and terrain, water streams and sea tides
as well as personnel with experience in handling different types of drill, its bits, drilling
fluids, casings, tubes and rigs, well planning is one of the most complex engineering
activities. Therefore, a team of distinct experts in the areas of Geology, Oceanography,
Mechanics, Electronics, business management and others is gathered to accomplish it.
Each one of them contributes to the analysis and definition of the well drilling plan with
his distinct perspective, leading to a highly optimized well plan.
The process of well drilling is also non-trivial. Many are the variables involved,
most of them requiring the constant monitoring by this specialized team. Tools must be
constantly replaced and renewed and equipments must be positioned with temporal and
geographic precision to guarantee optimal drilling at minimum cost.
Before the well planning process itself starts, a data processing stage is
necessary. The user will use Vis-Petro to gather, compile, analyse, correct and model
previously collected data information about the ocean, its behaviour, the underlying
terrain layers and reservoir geologic constitutions. The result of this stage is a complete
3D model with all the necessary geographic information of the target region.
After processing the raw geo-data, the first step in the definition of the well
drilling plan is the selection of the oil platform, more generally called as the Marine
Perforation Unit (MPU), from which the oil well will be drilled and explored. This
choice will be based on the water and terrain conditions of the sea region.
Once this has been done, the well head, to be placed on the terrain surface, will
be selected together with the riser. The former works as a faucet and controls the oil
flow from the soil while the latter works as a hose, which must resist to the sea region
streams and tides, and also transport the oil to the MPU.
The third and last step is the definition of the well path through the different
terrain layers. That path will connect the oil reservoir to the well head. Associated with
each well section, there will be a set of tools and equipments that will make viable their
perforation. The process will be accomplished with the aid of immersive VR systems
such as CAVEs (Cave Automatic Virtual Environments) and special 3D visualization
rooms. Only after this well path is finished, re-evaluated and approved the drilling
activities will start.
This sequence of operations would never reach the current level of complexity
and perfection without the aid of computers. They are used in every drilling stage, from
the topographic mapping to the real-time control of the drill. Currently, few globally
renowned companies, such as Landmark©
[6], control the well drilling software market.
They provide software packets with programs to be used along the entire drilling
process. Nevertheless, they are still incapable of coping with all the nuances in the

drilling activity, mostly when it comes to specific well drilling scenarios, such as ultra-
deep water oil exploration.
3. Related Work
With regard to VR, research has enormously advanced, enhancing data visualization and
interaction during well planning.
The BP Centre has collaborated with innovative research in the area of data
visualization, drilling planning and geologic interpretation. Kenny Gruchalla has
proposed a well path planning system based in pull points [7]. These pull points are
inserted below the marine terrain surface with specific orientations and positions.
Sequentially connected by circle arcs and straight-line segments, these pull points define
the drill path connecting the well head to the reservoir, crossing through different soil
layers.
To provide realism to the virtual environment containing the well model, natural
phenomena must be simulated. These may include the simulation of ocean waves and
tides, sea streams, marine terrain, gravity and soil layers properties. Depending on the
complexity of the model, such simulations may become very realistic to the detriment of
performance. It is important, therefore, that the simulation model has only the degree of
realism required by the user, neither more nor less.
There are many models currently proposed for ocean waves simulation and
rendering. Hinsinger et al. [2] have proposed a marine wave simulation model to
represent a calm ocean. They represent waves far from coast and may be interactively
viewed by the user with constant performance guarantee. Ts’o et al. [3] have proposed a
rendering algorithm based on texture maps and the Fresnel Law of Reflection to
simulate wave refraction and reflection. It is a more efficient substitution to ray-tracing
techniques, although it is also less precise. Thon et al. [4] have proposed a filter
representing the wave spectrum generated by wind, which is applied to the automatic
wave trains generation. These are the basic techniques composing the Vis-Petro wave
model.
With regard to terrain editing and generation, many are the techniques and tools
available for automatic terrain creation [8]. Nevertheless, none of the terrain editing
techniques found which can be applied directly to the 3D model seemed adequate to
Vis-Petro edition necessities. Most of them do not allow editing terrain regions, but only
regenerating the entire surface. Moreover, the edition of reservoirs requires a different
approach since it is not restricted to a horizontal surface.
4. Vis-Petro: a Well Drilling Planner
The Vis-Petro tool aims to facilitate the process of well planning for petroleum
engineers. It has been architected with the purpose of being used in different platforms
and supporting a diverse number of interfaces such as desktop PC monitors, Head-
Mounted Displays (HMDs) and CAVEs. To achieve such flexibility, the architecture of
Vis-Petro has an independent conceptual model linked to a set of exchangeable 2D and
3D graphical and input interfaces.
The application’s 3D models are rendered by the OGRE (Object-oriented

Graphics Rendering Engine) engine while the WIMP (Windows, Icons, Menus and
Pointing devices) interface is rendered by a two-dimensional (2D) GUI (Graphical User
Interface) library, such as CEGUI [10].
OGRE is an open-source general-purpose graphical rendering engine. It works
with most operating systems and video cards. OGRE’s native interface has been written
in C++, using advanced object-oriented concepts such as inheritance and polymorphism.
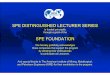
The architecture of Vis-Petro is divided in three main modules. The first one
manages the interaction with the user, the second contains the entire conceptual model
and the third manages internal operations. Figure 1 shows an interaction diagram of its
main architectural components.
Figure 1. General Vis-Petro architecture.
The components 2DModule, StateManager and State compose the
interaction module. 2DModule controls application menus via interaction commands
and is implemented by an external 2D GUI. The second component, State, assumes
the possible editing states of the system. It is responsible for applying the interaction
captured from the user in the 3D world to the conceptual model. There is a specific state
for MPU editing, as well as for terrain, well head, well path, fluid, tools and equipment
editing. Each state contains general sub states, such as selecting, editing or removing an
object from the scene. The third and last component, StateManager, is the most
important one of Vis-Petro. It manages all the possible states of the system. It also
connects all other main components.
The ConceptualModel is the second module and manages the attributes and
behaviours of the conceptual objects such as equipments, MPUs, pull points, reservoirs,
sea, terrain, tools and wells. It is the only access point to those conceptual objects by the
interface components, hence enabling the flexible adaptation of the conceptual model to
other graphical interfaces.
FileManager and ViewpointManager constitute the third and last
module and execute extra-internal operations. Vis-Petro allows the user to create model
libraries from project models for future reuse. For that purpose, FileManager is
responsible for loading and saving models, as well as full projects. In addition,

ViewpointManager is responsible for controlling the user viewpoints, saving and
restoring them. Viewpoints are associated to the states that were active in the moment of
their insertion, even though they are accessible from other states.
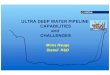
To exemplify the interaction among those main components, the steps necessary
to add a fluid to a well path are described in sequence and shown in Figure 2: a) The
user sets the application to the fluid editing state on the application menu (2DModule);
b) The user selects the type of fluid to be applied to the current well section 2DModule
activates the fluid insertion sub state via StateManager, obtains a new fluid of the
selected type from FileManager and forwards it to StateManager, which
forwards the fluid information to State; c) The user selects a well in the 3D scene,
ConceptualModel returns it to State; d) The user selects the fluid insertion points
on the well path and State adds the new fluid to ConceptualModel.
Figure 2. Adding a fluid to a well path.
Similar processes occur for each possible interaction in Vis-Petro. It is important
to notice, in this example, the intermediation of StateManager between the active
state in the 3D scene and the 2D interface.
Regarding user movement, two different navigation modes are possible. The first
one allows pitching and yawing, as well as translation on the user’s head direction and
its perpendicular planes. The second also allows yawing and pitching, but the translation
movement only occurs on planes parallel or perpendicular to the sea surface.
5. Methodological Results
Vis-Petro has a prototype developed with the OpenGL render library. It consists of a
well path creation model with pull-point edition and models for ocean waves simulation
and marine terrain surface. There is also an interface prototype developed in
Macromedia Flash©
to demonstrate Vis-Petro functionalities. The architecture of Vis-

Petro has also been defined and its implementation is currently being carried out.
With regard to interface devices, Vis-Petro’s prototype has already been
successfully adapted to some advanced devices, such as six-degrees-of-freedom (6DOF)
gloves and stereoscopic desktop glasses. In addition, it has been evaluated in both
Windows and Linux operational systems.
The following sections will explain in detail the underlying mechanisms for well
path creation, ocean waves simulation, marine terrain surface construction, and user
interaction. The results achieved, until the current moment, are presented, as well as the
explanation about the methodologies successfully implemented.
5.1. Well Path Creation Model
The module responsible for the construction of the well path connecting the well head to
the oil reservoir was implemented based on the technique presented by Gruchalla [1].
The well path consists of a set of adjustable arrows, denominated pull points, which are
automatically connected by a sequence of circle arcs and straight-line segments.
The model implemented allows real-time adjustment of the well path by simply
translating or rotating the pull points. The current version places all pull points on a
plane perpendicular to the sea surface. Two kinds of well path editing techniques are
possible. In the first type, the user manipulates each pull point. The pull points may
rotate around the plane normal, with the latter positioned in the pull point centre, and
translate in the plane surface. Three types of connections between two pull points are
possible: a straight-line segment, a C-shaped curve followed or not, or preceded, by a
straight-line segment, and an S-shaped curve having or not a straight-line segment in its
middle. They are respectively presented in Figure 3a.
(a) (b)
Figure 3. (a)Types of connections between pull points and (b) a Vis-Petro pull point well path example.
In the second type of edition, the plane containing the pull points may be rotated
around the normal of the well head, changing the azimuth angle of the entire well path.
The well head, together with that path, may also be translated. Therefore, a well head
may be placed anywhere in the surface of the terrain and may be connected, through the
well path, to any point in a reservoir’s surface.
In the current version, azimuth is not implemented, that is, well path creation is
restricted to a plane. Figure 3b shows an example of well path. The pull points are

presented as cones, the first one representing the well head.
The well path model is very flexible in terms of well editing. It is built during
pull point insertion. As soon as a new pull point is inserted, the connection from the last
point to it is generated. The pull points position or orientation and the well path are
updated in real-time. The distinction between types of sections helps eliminate
redundant intermediate points in straight well sections. Nevertheless, the user himself
must adjust the pull points to ensure they do not collide with other wells in production
or with undesirable geological structures.
5.2. Ocean Waves Simulation Model
Graphical simulation of natural phenomena, depending on the realism desired, may
become a non-trivial and computationally expensive task. Nevertheless, the simulation’s
visual and physical quality must satisfy users, who would like to feel immersed in the
virtual world as well as accomplish interaction tasks consistently. To enhance Vis-Petro
realism, ocean waves simulation was implemented.
Currently, a number of ocean waves models are proposed. The present work was
based on Hinsinger et al., Ts’o et al. and Thon et al., for modelling, rendering and
animation [2][3][4]. The relation between each of these models and Vis-Petro
implementation is presented below.
5.2.1 Wave Physical Modelling
Following Hinsinger et al. [2], Vis-Petro’s wave model was based on Gerstner’s
swell model, which describes the behaviour of ocean particles. Wave trains were
simulated with the shape of trochoids. The Gerstner’s model sets each water particle to
move in circles, whose radii are equal to the amplitude of the wave passing through that
particle, and around the location at rest.
However, the combination of several different waves was needed to provide
greater realism. Therefore, the sum of wave train functions generated the final shape of
the ocean surface. In order to generate a calm sea spectrum, automatic wave trains
generation was used, similar to the work of Thon et al [4]. The model Thon et al was
also used to define angular velocity and wave amplitude. The remaining wave
parameters, wavelength and wave direction, were defined manually.
An anti-aliasing technique was also used to prevent elevations in regions where
distance would make them imperceptible to the user. When the sum of heights for a
location at rest is calculated, the wave trains whose wavelengths do not exceed the
distance between that location and its nearest neighbour are discarded. This technique
improves system performance.
The definition of the particles’ location at rest on the ocean surface was achieved
by applying the adaptive scheme proposed by Hinsinger et al [2]. Accordingly, it
projected a mesh from the screen to the horizontal plan cz = (where the constant ℜ∈c )
to obtain the locations at rest of the Gerstner’s model. Those locations were used as
input to the wave trains equation. In this model, the sampling by projection ends up
having the Level of Detail (LOD) technique intrinsically implemented. Moreover, as the
ocean surface mesh resolution is constant, constant execution time is also guaranteed,

independently of the ocean’s region being visualized. In this work, the ocean particles
were uniformly distributed over each axis.
5.2.2 Results
The result of the Vis-Petro’s ocean waves simulation is presented in Figure 4.
The results obtained from this model were quite realistic, but implied in a perceptible
frame rate decrease. The uniform distribution of the mesh vertices ended up generating a
high number of points, which slightly hindered optimal performance. The simulation of
ocean waves is being integrated into the architecture of Vis-Petro as one of the scene
components inside the conceptual model with a special connection to the 3D interface.
Figure 4. Results of Vis-Petro ocean waves simulation model.
5.3. Marine Terrain Surface
The Vis-Petro application allows the user to edit the marine terrain surface, creating a
terrain profile composed of peaks and depressions, resulting in realistic models that do
not restrict user solely to standard surfaces, such as planes. The marine terrain surface is
constituted by a height map which may be edited to model those peaks or depressions.
The marine terrain surface has all cells divided in their middle to achieve a
higher LOD in the mesh. Each intersection point between lines and columns, henceforth
called editing points has its height editable.
Every point contained in the editing point’s actuation area will have its height
modified according to an editing point height-based function.
To create a peak or a depression when the user changes the height of an editing
point EP, a function Height is applied to the points contained in its actuation area. The
Equation Erro! A origem da referência não foi encontrada. is responsible for
producing such an effect, creating a peak or a depression depending on whether the
value of the editing point height is positive or negative, respectively.
( ) ( ) ( )pp
p
p
p
p hzzarea
hxx
area
hzxHeight +−
−+−
−=
2
2
2
2, ( 1 )
x is the x coordinate of a point contained in the actuation area of EP, z is the z
coordinate of a point contained in the actuation area of EP, px is the x coordinate of the
editing point, pz is the z coordinate of the editing point, ph is the editing point’s height,

area is the editing point’s actuation area and pHeight is the function which calculates
the height of a point ( )zx, according to the editing point ( )pp zx , height.
Another impact due to the modification of the editing point height occurs when
the actuation areas of more than one point intersect. The calculus of the affected points’
heights may be given by three different functions: the sum of the heights resultant from
the actuation of each editing point (additive interpolation), the superposition of the
maximum heights generated by the actuation of each editing point (maximum restrictive
interpolation) or the superposition of the minimum heights generated by the actuation of
each editing point (minimum restrictive interpolation).
To explain each of the above interpolations, given a 3D surface with dimensions
50x50 and two editing points: ( ){ }15,50,25,251 =−==== areahzxP and
( ){ }5,25,25,252 ===== areahzxP , Figure 5 shows the achieved results with the
additive, maximum restrictive and minimum restrictive interpolations of the points 1P
and 2P , respectively.
(a) (b) (c)
Figure 5. (a) Additive interpolation, (b) maximum restrictive interpolation and (c) minimum restrictive interpolation without smoothing.
However, by having a closer look in the example above, it is clearly visible that
the results do not look very realistic and other techniques must be taken into
consideration. To avoid those sharp contours on the above surfaces, a smooth algorithm
was applied in the entire region affected by the editing points.
Box Filtering [11], known as a method to reduce the intensity variation between
pixels of an image, was here applied to smooth the 3D surface and reduce the height
variation between points. Although it is not being applied on an image, the surface
heights consistently substitute the image’s pixels. Figure 5b is an example of a surface
area that should be smoothed.
Figure 6. Maximum restrictive interpolation with smoothing.

The Box Filtering algorithm was applied on the bounding area resultant from the
union of the actuation areas of the editing points that intersected. The result, shown in
Figure 6, makes explicit the benefits of smoothing in the terrain surface creation.
Figure 7 shows a complete marine terrain surface edited from a plane as a result
of user interaction, which is currently being carried out via a configuration file. Such
configurations consist in setting the dimensions of surface, the interpolation models for
each editing point and the positions and heights of the editing points.
Figure 7. A marine terrain surface.
5.4. Interaction
The interaction system of the Vis-Petro application was developed with the necessary
flexibility to be applied to a variety of interface types. These include from desktop to
immersive interfaces, such as HMDs and CAVEs. The interface will be adjusted to each
new set of peripherals, having slight modifications in the set of commands, but
maintaining the core interaction system.
This interaction core is composed by navigation, selection, manipulation,
edition, insertion, removal and viewpoint commands. They are described in detail
below. These commands may be divided in two distinct interaction categories: 2D
interface commands and direct 3D commands.
The first one contains commands made via the 2D lateral menu, illustrated in
Figure 8. The selection of different application states, the insertion of models by
dragging them from this menu to the 3D scene and the configuration of models
parameters are interaction activities only possible through the use of such menu.
On the other hand, the direct commands are originated from an input device and
are directly applied to the 3D scene. These include commands for navigation, selection
and manipulation of scene objects, as well as pull points themselves.
Nevertheless, many are the commands that may be applied by both interaction
techniques, due to the existence of convenient shortcuts. This is the case of viewpoint
manipulation, save and open project, 3D object translation, rotation, removal and state
modification commands.
While in desktop interfaces most commands may be done via the lateral menu
without problems, in immersive interfaces, commands will have to be done directly in
the application in order not to affect user immersion.

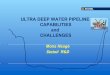
A prototype of the desktop interface is shown in Figure 8. A study on which
interface library will better comply with the necessities of the application is currently
being carried out. It is composed of an application menu with commands for
construction of an oil well project. This menu allows the user to open and save projects,
models and libraries, insert, restore and delete viewpoints from the model, insert, edit
and delete objects from the scene, navigate (change the user point of view) in the scene.
Moreover, not only are they available by accessing the lateral menu, but also by using
keyboard shortcuts. An interface prototype for Vis-Petro may be found at
http://www.gprt.ufpe.br/~grvm/vispetro.
Figure 8. Interface prototype for desktop based application version.
6. Conclusions and Future Work
The analysis of Vis-Petro functionalities shows that each of them has their benefits for
each problem they aim to solve. Their analysis, however, posed different perspectives in
the evaluation of the well planning application development. It is believed that the
thorough study and further improvement of these techniques will contribute to the
definition of a model capable of better coping with the problems arisen during well
planning.
Although the sea model mesh points were uniformly distributed, other
approaches, in which the density of points would vary according to LOD levels, could
have been used. They could have made possible the mesh resolution reduction without
loss of visual quality. As long as waves are only a visual enhancement to the model, not
having their physical properties any effect over well planning, such optimisations may
be applied in future versions without loss simulation precision. However, sea behaviour
interaction, such as collision, must also be considered in future tool versions.
With regard to the well path, much as the model is consistent, it is also missing
the addition of complementary functionality. The manipulation of the azimuth angle will
greatly expand the user interaction possibilities. Apart from that, another interesting
possible feature would be the automatic collision detection and avoidance among wells
in a region.
Regarding marine terrain edition, despite Vis-Petro’s capability in dealing with
such matter effectively much still must be done. Better interpolation and smoothing

techniques, with approaches specific to the terrain manipulation problem, must be
designed. Nevertheless, the study and test of techniques from other areas of knowledge,
such as image processing, have proved to be a quite interesting initial approach.
The edition of reservoirs is currently under development and will be based on
marine terrain edition, using edition points and the edition point’s normal to indicate the
peak or depression growth direction.
Currently, the data used by Vis-Petro is still simulated. The future access to real
geographic data will greatly help in the validation of the implemented techniques.
Lastly, although some advanced input and output devices have already been
tested, others will be analyzed and interaction with each one of them will be evaluated.
Much as Vis-Petro has progressed, it still needs further improvements and
complements. Other modules are under development to increase the toolset available
and enable Vis-Petro to take part in a greater number of well planning activities.
Nevertheless, its innovative interface, integration with the entire ultra-deep water
drilling process and flexibility to different interfaces and platforms makes of Vis-Petro a
singular tool for off-shore well planning.
7. Acknowledgements
The authors are grateful to CNPq, which partially funded this research.
References
[1] K. Gruchalla, Immersive Well Path Planning: The Added Value of Interactive Immersive
Visualization, master's thesis, BP Centre for Visualization, University of Colorado at Boulder, 2003.
[2] D. Hinsinger, F. Neyret, and M.P. Cani, “Interactive Animation of Ocean Waves”, ACM
SIGGRAPH/Eurographics SCA, Saarbruecken, Germany, 2002, pp. 161-166.
[3] P.Y. Ts’o, and B.A. Barsky, “Modeling and Rendering Waves: Wave-Tracing Using Beta-Splines
and Reflective and Refractive Texture Mapping”, ACM TOG, vol. 6, issue 3, ACM Press, 1987, pp.
191-214.
[4] S. Thon, J.-M. Dischler, and D. Chazanfarpour, “Ocean Waves Synthesis using a Spectrum-based
Turbulence Function”, CGI, Geneva, Switzerland, 2000, pp. 65.
[5] J.E. Thomas, Fundamentos da Engenharia de Petróleo, 2nd
edition, Editora Interciência, Rio de
Janeiro, Brazil, 2001.
[6] Landmark Graphics Corporation. Available: Landmark Graphics Corporation Site. URL:
http://www.lgc.com/, visited on March 2006.
[7] K. Gruchalla, “Immersive Well Path Planning: Investigating the added value of immersion”, IEEE VR
Conference, Boulder, Colorado, USA, 2004.
[8] C. Hormann, Terrain Simulation Links. Available: C. Hormann Site. URL:
http://www.imagico.de/terlinks.html, visited on January 2006.
[9] D.A. Bowman, E. Kruijff, J.J. LaViola, and I. Poupyrev, 3D User Interfaces: Theory and Practice,
Addison Wesley Longman Publishing Co. Inc., Redwood City, CA, USA, 2004.
[10] OGRE 3D: Open Source Graphics Engine. Available: The OGRE Team Site. URL:
http://www.ogre3d.org/, visited on January 2006.
[11] R.C. Gonzalez, and R.E. Woods, Processamento de Imagens Digitais. Editora Edgard Blucher Ltda,
São Paulo, SP, Brazil, 2000.