Embed Size (px)
Citation preview

IN-CYLINDER INVESTIGATION OF ENGINE SIZE- AND SPEED-SCALING
EFFECTS
by
Douglas Michael Heim
A dissertation submitted in partial fulfillment of the
requirements for the degree of
Doctor of Philosophy
(Mechanical Engineering)
at the
UNIVERSITY OF WISCONSIN – MADISON
2011

ii
ABSTRACT
Two geometrically scaled, two-valve, optically accessible, single-cylinder
research engines were designed and fabricated to study the fundamentals of engine size-
and speed-scaling effects. All dimensions between the engines scale by the factor of
1.69. Two different port geometries and two different port orientations and both
shrouded and non-shrouded intake valves were tested to vary the intake-generated flow.
Prior to testing the engines, the different head configurations were tested on a steady flow
bench. Flow, swirl, and tumble parameters were measured to quantify the performance
of the engine heads.
The engines were motored at speeds ranging from 300-1200 RPM for the larger
engine and from 600-1800 RPM for the smaller engine at an atmospheric intake pressure.
Particle image velocimetry data were taken on a single plane, parallel to the piston
surface, in the engines using both a low magnification to characterize the large-scale flow
phenomena, and a high magnification to characterize the turbulence field. The low
magnification data for conditions with higher levels of swirl were analyzed to determine
the location of the swirl center and the angular velocity. The high magnification data
(acquired at TDC) were investigated using both ensemble- and spatial-averaging to
define a mean velocity field, and all of the results from the spatial-average method were
investigated as a function of cutoff frequency. The fluctuating velocity fields were used
to calculate turbulence intensity, two-point fluctuating velocity correlations, and
longitudinal and transverse integral length scales. Turbulence intensity measurements
showed close agreement between the large and small engines. The longitudinal
lengthscales were insensitive to direction of separation and were on average twice the

iii
transverse lengthscale, indicating a high level of isotropy in the flow. The longitudinal
lengthscales, when normalized by the TDC clearance, showed good agreement between
the large and small engines.
Turbulent kinetic energy spectra were calculated, and were found to show an
extended inertial subrange for the higher engine speeds; the spectra were fit well by the
model spectrum of Pope. Lower engine speeds and the use of high cutoff frequencies in
the spatial-averaging method were found to reduce the presence of the inertial subrange,
and may result in a low Reynolds number condition where the turbulence is not fully
developed and scale separation is not achieved. The spectral analysis provided
lengthscales (L11) that were similar between the small and large engines when normalized
by the TDC clearance. Kolmogorov scales between the small and large engines also
showed similarity when compared at the same mean piston speed. Taylor-scale Reynolds
numbers were calculated for all engine conditions and collapsed onto a single curve when
plotted against an inlet valve Mach index.

iv
DEDICATION
This work is dedicated to my parents. I will always be grateful for the love and support
they have shown me. I have traveled many paths in life because of the opportunities they
provided for me.

v
Funding for this project was provided by the Wisconsin Small Engine Consortium.

vi
TABLE OF CONTENTS
Abstract ............................................................................................................................... ii
Dedication .......................................................................................................................... iv
Table of Contents ............................................................................................................... vi
List of Figures ................................................................................................................... xii
List of Tables ................................................................................................................. xxiii
Nomenclature ...................................................................................................................xxv
Chapter 1. Introduction ........................................................................................................1
1.1. Motivation .................................................................................................................1
1.2. Objective ...................................................................................................................2
1.3. Outline .......................................................................................................................2
Chapter 2. Review of Literature...........................................................................................3
2.1. Principle of Similitude ..............................................................................................3
2.2. Engine Size-Scaling ..................................................................................................4
2.3. Engine Speed-Scaling .............................................................................................12
2.4. Measurement and Analysis of Turbulence Length Scales and Turbulent Spectra in
Engines ...........................................................................................................................25
Chapter 3. Experimental Setup ..........................................................................................29

vii
3.1. Description of Engines ............................................................................................29
3.2. Engine Heads ...........................................................................................................31
3.3. Engine Optical Access ............................................................................................39
3.4. Dynamometer ..........................................................................................................41
3.5. Intake and Exhaust Systems ....................................................................................41
3.6. Intake Air Flow Metering ........................................................................................43
3.7. Cylinder Pressure ....................................................................................................44
3.8. Oil and Vacuum System ..........................................................................................44
3.9. Coolant System .......................................................................................................46
3.10. Optical System ......................................................................................................47
3.11. Camera System ......................................................................................................47
3.12. Particle Image Velocimetry (PIV) System ............................................................50
Chapter 4. Steady Flow Characterization of Intake Ports ..................................................52
4.1. Experimental Equipment .........................................................................................52
4.2. Flow Coefficient ......................................................................................................57
4.3. Swirl Coefficient and Swirl Ratio Definitions ........................................................59
4.4. Impulse-Type Meter Initial Testing ........................................................................60
4.5. Vane-Type Meter Testing .......................................................................................62
4.6. Swirl References .....................................................................................................64

viii
4.6.1. Zero-Swirl Reference .......................................................................................66
4.6.2. Known-Swirl Reference ...................................................................................66
4.6.3. Honeycomb Geometry and Swirl Reference Results .......................................67
4.7. Swirl Coefficient Testing ........................................................................................72
4.8. Tumble Coefficients and Testing ............................................................................76
Chapter 5. Optical Engine Measurements and Analysis ....................................................79
5.1. Engine Conditions ...................................................................................................79
5.2. Engine Flow Rate ....................................................................................................79
5.3. Engine Peak Pressure ..............................................................................................81
5.4. Methods of Determining Mean and Fluctuating Velocity Fields ............................84
5.5. PIV FOV Locations and First-Choice Vector Statistics ..........................................85
5.6. Low-Magnification PIV Results – Analysis of Swirl Progression and Rotation
Rate .................................................................................................................................88
5.7. High-Magnification PIV Results .............................................................................96
5.7.1. Turbulence Intensity .........................................................................................99
5.7.2. Correlation Length Scale Analysis .................................................................108
5.7.2.1. Correlation Length Scale Analysis – Ensemble-Average Method ..........112
5.7.2.2. Correlation Length Scale Analysis – High-Magnification FOV
Comparison, Ensemble-Average Method ............................................................123
5.7.2.3. Correlation Length Scale Analysis – Spatial-Average Method ..............124

ix
5.7.2.4. Correlation Length Scale Analysis – High-Magnification FOV
Comparison, Spatial-Average Method.................................................................132
5.7.3. Energy Spectra Analysis.................................................................................134
5.7.3.1. Energy Spectra Analysis – Ensemble Average Method ..........................137
5.7.3.2. Energy Spectra Analysis – Ensemble Average Method: L11 ...................140
5.7.3.3. Energy Spectra Analysis – Ensemble Average Method: L11, High-
Magnification FOV Comparison .........................................................................142
5.7.3.4. Energy Spectra Analysis – Ensemble Average Method: Re£ ..................143
5.7.3.5. Energy Spectra Analysis – Ensemble Average Method: η .....................146
5.7.3.6. Energy Spectra Analysis – Spatial-Average Method ..............................148
5.7.3.7. Energy Spectra Analysis – Spatial-Average Method: L11 .......................150
5.7.3.8. Energy Spectra Analysis – Spatial-Average Method: L11, High-
Magnification FOV Comparison .........................................................................156
5.7.3.9. Energy Spectra Analysis – Spatial-Average Method: Re£ ......................158
5.7.3.10. Energy Spectra Analysis – Spatial-Average Method: η ........................160
5.8. Discussion .............................................................................................................166
Chapter 6. Summary and Conclusions .............................................................................179
6.1. Conclusions ...........................................................................................................179
6.2. Future Work ..........................................................................................................183
References ........................................................................................................................184
x
Appendix A: Valve Lift Profile .......................................................................................189
Appendix B: Intake Port Drawings ..................................................................................191
Appendix C: Flow Coefficients and Uncertainty Analysis..............................................196
C.1. Flow Coefficients .................................................................................................196
C.2. Flow Coefficient Uncertainty Analysis ................................................................199
Appendix D: Swirl Coefficient and Swirl Ratio Uncertainty Analysis ...........................204
D.1. Swirl Coefficient Uncertainty Analysis ...............................................................204
D.2. Swirl Ratio Uncertainty Analysis .........................................................................207
Appendix E: MATLAB Code ..........................................................................................208
E.1. MATLAB Code to Calculate the Low-Magnification FOV Swirl Center and
Angular Velocity ..........................................................................................................208
E.2. MATLAB Code to Calculate the Turbulence Intensity of the Ensemble Average
Data ..............................................................................................................................212
E.3. MATLAB Code to Calculate the Turbulence Intensity of the Spatial-Average
Data ..............................................................................................................................216
E.4. MATLAB Code to Calculate the Correlation Lengthscales Using the Ensemble
Average Data, Single-Sided Correlation ......................................................................220
E.5. MATLAB Code to Calculate the Correlation Lengthscales Using the Spatial-
Average Data, Double-Sided Correlation ....................................................................226

xi
E.6. MATLAB Code to Calculate the Energy Spectra Using the Ensemble Average
Data ..............................................................................................................................232
E.7. MATLAB Code to Calculate the Energy Spectra Using the Spatial-Average
Data ..............................................................................................................................235
E.8. MATLAB Function to Calculate the Pope 1-D Model Spectrum in the Horizontal
Direction .......................................................................................................................236
E.9. MATLAB Function to Calculate the Sum Squared Error Between the Measured
Spectra and Pope 1-D Model Spectrum in the Horizontal Direction ...........................238
E.10. MATLAB Function to Calculate the Pope Model Spectrum Constant cL ..........240
E.11. MATLAB Function for Calculating the Difference in the Turbulent Kinetic
Energy ..........................................................................................................................241
xii
LIST OF FIGURES
Figure 2.1: MIT similar engine design, from [12] ..............................................................5
Figure 2.2: Volumetric efficiency vs. mean piston speed of MIT similar engines, from
[12] .......................................................................................................................................7
Figure 2.3: Volumetric efficiency vs. a preliminary Mach index, from [13] .....................9
Figure 2.4: Volumetric efficiency vs. a modified Mach index, from [13]........................10
Figure 2.5: Indicated mean effective pressure vs. mean piston speed of MIT
geometrically similar engines, from [11] ...........................................................................11
Figure 2.6: Pressure traces of MIT geometrically similar engines, from [11] ..................11
Figure 2.7: Variation with engine speed of the turbulence intensity normalized by the
mean piston speed, from [3]...............................................................................................14
Figure 2.8: Variation with engine speed of the RMS velocity fluctuation normalized by
the mean piston speed, from [4] .........................................................................................15
Figure 2.9: Turbulence intensity versus crank angle without swirl, from [5]...................17
Figure 2.10: Turbulence intensity versus crank angle with swirl, from [5] ......................17
Figure 2.11: TDC turbulence intensity versus engine speed with and without swirl, from
[5] .......................................................................................................................................18
Figure 2.12: TDC ensemble averaged cyclic variation, from [5] .....................................18
Figure 2.13: Effect of cyclic variation in the bulk velocity on turbulence intensity, from
[7] .......................................................................................................................................20
Figure 2.14: Ensemble averaged turbulence intensity at TDC versus RPM, from [7] .....21

xiii
Figure 2.15: Comparison of fluctuation or turbulence intensity versus mean piston speed
measured by various researchers, from [7] ........................................................................21
Figure 2.16: Variation of axial turbulence intensity with engine speed at TDC, no swirl,
from [9] ..............................................................................................................................22
Figure 2.17: Turbulence intensity as a function of flow rate at TDC, from [18] ..............23
Figure 2.18: Turbulence intensity as a function of compression ratio, modified from
[17] .....................................................................................................................................24
Figure 2.19: Fluctuation integral length scale/instantaneous clearance height vs. crank
angle, from [32] .................................................................................................................26
Figure 3.1: Instantaneous piston speed/mean piston speed as a function of crank angle
for the small and large engines ..........................................................................................30
Figure 3.2: Percent difference of the instantaneous piston speed/mean piston speed
between the large and small engines ..................................................................................31
Figure 3.3: Small engine head (left side) and large engine head ......................................33
Figure 3.4: Valve and valve seat geometry .......................................................................34
Figure 3.5: Intake and exhaust non-dimensional valve lift versus crank angle profiles of
both large and small engines ..............................................................................................35
Figure 3.6: Top view of engine showing (a) 0-degree and (b) 90-degree port orientations
with respect to engine cylinder ..........................................................................................36
Figure 3.7: Intake port geometries of the (a) performance port and (b) utility port .........37
Figure 3.8: (a) Performance port right half and (b) utility port right half showing grooves
that mate with a divider plate .............................................................................................38

xiv
Figure 3.9: Cross-sectional view of the (a) large and (b) small optically accessible
engines ...............................................................................................................................40
Figure 3.10: Intake surge tank schematic for small and large engines. Dimensions refer
to small engine, large engine is scaled approximately by 1.69 scaling factor ...................43
Figure 3.11: Small engine oil and vacuum system ............................................................45
Figure 3.12: Small engine coolant system .........................................................................46
Figure 3.13: Resolution image of high-magnification FOV using 200 mm lens for large
engine .................................................................................................................................49
Figure 3.14: Intensity ratio versus line pairs per mm of resolution target for high-
magnification FOVs of large and small engines ................................................................49
Figure 4.1: (a) Flow test setup of small head, (b) swirl test setup of large head, and (c)
tumble test setup of small head on the flow bench next to large tumble adapter ..............53
Figure 4.2: (a) Vane-type swirl meter test setup, (b) Impulse-type torque meter test
setup ...................................................................................................................................54
Figure 4.3: Front and side views of tumble testing arrangement ......................................55
Figure 4.4: Signal-to-noise ratio of large and small heads using impulse swirl meter from
[44] .....................................................................................................................................61
Figure 4.5: Performance ports using mockup shrouded valves. Vane-type meter tested
with standard 5.2 inch diameter paddle. + CW Swirl, - CCW Swirl ................................63
Figure 4.6: Performance ports using mockup shrouded valves. Vane-type meter tested
with Dp/B=1.2 custom paddles. + CW Swirl, - CCW Swirl. The impulse-type meter
measurements are the same as Fig. 4.5 ..............................................................................64
Figure 4.7: (a-b) Zero-swirl and (c-d) known-swirl reference fixtures ............................65

xv
Figure 4.8: Impulse- and vane-type meter response to a known angular momentum flux
produced from the known-swirl reference tube for the small and large fixtures. For all
cases a cell height-to-diameter ratio of 1.4 was used .........................................................69
Figure 4.9: Swirl conversion efficiency as a function of the cell aspect ratio for (a) the
vane-type meter, and (b) the impulse-type meter ..............................................................71
Figure 4.10: Swirl coefficients versus non-dimensional valve lift of the (a) performance
ports, non-shrouded valves, (b) utility ports, non-shrouded valves, and (c) both ports,
shrouded valves. + CW Swirl, - CCW Swirl .....................................................................74
Figure 4.11: S/N ratio from swirl coefficient tests of ports in 0-degree orientation ..........75
Figure 4.12: (a) Top-down view of engine head indicating head angle direction on
tumble adapter. Bold arrow is affixed to engine head. (b) Small head at 90° head
angle ...................................................................................................................................77
Figure 4.13: (a) Tumble coefficients versus engine head angle for the utility ports in the
90-degree orientation with the non-shrouded valves .........................................................78
Figure 5.1: Volumetric efficiency versus mean piston speed for all engine running
conditions ...........................................................................................................................80
Figure 5.2: Volumetric efficiency versus mean piston speed for two separate runs in the
small engine .......................................................................................................................81
Figure 5.3: Cylinder peak pressure versus mean piston speed .........................................83
Figure 5.4: Top view of engine cylinder showing FOVs with respect to engine cylinder
for both engines..................................................................................................................86
Figure 5.5: Percent difference between turbulence intensity calculated using N images
versus 200 images with four engine conditions, high-magnification FOV, ensemble
average method ..................................................................................................................87

xvi
Figure 5.6: Top view of engine cylinder showing low-magnification FOV velocity fields
at TDC for the utility port with the shrouded valve at 600 rpm. (a) Ensemble average, (b)
calculated solid body, and (c)-(d) two randomly chosen instantaneous velocity fields ....91
Figure 5.7: Top view of engine cylinder showing swirl center locations at 90 bTDC, 45
bTDC, and TDC, ports in 0-degree orientation. Large engine data at 300, 600, 900, and
1200 rpm, small engine data at 600, 1200, and 1800 rpm. Axes made non-dimensional
by cylinder radius. Open symbols: small engine, filled symbols: large engine. Utility
port: (a) shrouded valve, (b) non-shrouded valve. Performance port: (c) shrouded valve,
(d) non-shrouded valve ......................................................................................................92
Figure 5.8: Normalized angular velocity vs. crank angle, ports in 0-degree orientation.
Open symbols: small engine, filled symbols: large engine. Utility port: (a) shrouded
valve, (b) non-shrouded valve. Performance port: (c) shrouded valve, (d) non-shrouded
valve ...................................................................................................................................94
Figure 5.9: Average normalized angular velocity at TDC vs. swirl ratio, ports in 0-degree
orientation ..........................................................................................................................95
Figure 5.10: Selected images showing the resulting velocity fields using the two methods
of computing the mean velocity field for the given condition: large engine, utility port,
shrouded valve, 0-degree orientation, 1200 rpm. (a) Ensemble average velocity field, (b)
individual cycle instantaneous velocity field, and spatial-average velocity fields for the
individual cycle (b) using cutoff lengthscales of (c) 5 mm, (d) 10 mm, and (e) 15 mm ...99
Figure 5.11: Selected images showing the high-magnification FOV turbulence intensity
found using the (a) ensemble average method and (b) the spatial-average method at a
cutoff lengthscale of 10 mm. (c) contains the same data as (b) but omits the five rows
and columns nearest the edges to illustrate the data used for processing. Engine
condition: large engine, utility port, shrouded valve, 0-degree orientation, 1200 rpm ....102
Figure 5.12: Turbulence intensity at TDC versus mean piston speed using the ensemble
average method ................................................................................................................103
Figure 5.13: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Ensemble average data are included at fc = 0 ......................................104

xvii
Figure 5.14: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Cutoff frequency made non-dimensional using TDC clearance.
Ensemble average data are included at fc = 0 ...................................................................105
Figure 5.15: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Cutoff frequency made non-dimensional using TDC clearance. Spatial
average slopes normalized by ensemble average slope ...................................................106
Figure 5.16: Turbulence intensity at TDC versus mean piston speed using the ensemble
average method. Comparison of data taken in high-magnification FOV versus second
high-magnification FOV ..................................................................................................107
Figure 5.17: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Comparison of data taken in high-magnification FOV versus second
high-magnification FOV. Ensemble average data are included at fc = 0 ........................108
Figure 5.18: Representative single- and double-sided correlations in the vertical direction
using ensemble- and spatial-averaged data using three cutoff lengthscales. Engine
condition: Large engine, UP, SV, 0-deg orientation ........................................................111
Figure 5.19: Correlation coefficients using the ensemble average method in the vertical
direction. Engine condition: large engine, utility port, shrouded valve, 0-degree
orientation, 1200 rpm .......................................................................................................113
Figure 5.20: Longitudinal and transverse integral lengthscales versus mean piston speed
in the vertical and horizontal directions using the ensemble average method. Engine
condition: utility port, shrouded valve, 0-degree orientation ...........................................114
Figure 5.21: Non-dimensional longitudinal and transverse integral lengthscales versus
mean piston speed in the vertical and horizontal directions using the ensemble average
method. Engine conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg.,
and Performance port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg ...........................118
Figure 5.22: Non-dimensional integral lengthscales for all engine conditions and speeds
in the vertical versus horizontal directions using the ensemble average method ............118

xviii
Figure 5.23: Non-dimensional modified longitudinal integral lengthscales versus mean
piston speed in the vertical and horizontal directions using the ensemble average method.
Engine conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and
Performance port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg ..................................122
Figure 5.24: Modified non-dimensional longitudinal lengthscales for all engine
conditions and speeds in the vertical versus horizontal directions using the ensemble
average method ................................................................................................................123
Figure 5.25: Comparison of transverse integral lengthscales calculated in the two high-
magnification FOVs versus mean piston speed in the vertical and horizontal directions
using the ensemble average method ................................................................................124
Figure 5.26: Representative double-sided correlations in the vertical direction for spatial-
averaged data using three cutoff lengthscales and corresponding best-fit curves. Engine
condition: Large engine, UP, SV, 0-deg orientation ........................................................126
Figure 5.27: Longitudinal and transverse integral lengthscales in the horizontal direction
using the spatial-average method. (a) Lii versus fc, (b) Lii/hTDC versus fc, and (c) Lii/hTDC
versus fc*hTDC. Engine condition: Utility port, non-shrouded valve, 0-degree orientation,
all engine speeds ..............................................................................................................128
Figure 5.28: Longitudinal and transverse integral lengthscales in the horizontal and
vertical directions using the spatial-average method. Open symbols: small engine, filled
symbols: large engine. Engine conditions: Utility port, (a)-(b) SV, 0-deg., (c)-(d) NV, 0-
deg., (e)-(f) NV, 90-deg., and Performance port, (g)-(h) SV, 0-deg., (i)-(j) NV, 0-deg.,
(k)-(l) NV, 90-deg ............................................................................................................132
Figure 5.29: Comparison of transverse integral lengthscales calculated in the two high-
magnification FOVs versus fc in the vertical and horizontal directions using the spatial-
average method. Engine condition: large engine, (a) utility port, shrouded valve, 0-deg.
orientation, and (b) performance port, shrouded valve, 0-deg. orientation .....................134
Figure 5.30: Model and calculated one-dimensional energy spectra in the vertical
direction using the ensemble average method to determine the mean velocity field.
Engine condition: utility port, 0-degree orientation, shrouded valve, (a) large engine at
300-1200 rpm and (b) small engine at 600-1800 rpm .....................................................140

xix
Figure 5.31: Non-dimensional longitudinal integral lengthscales versus mean piston
speed in the vertical and horizontal directions using the energy spectra analysis-ensemble
average method. Open symbols: small engine, filled symbols: large engine. Engine
conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance
port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg .......................................................142
Figure 5.32: Comparison of longitudinal integral lengthscales calculated in the two high-
magnification FOVs versus mean piston speed in the vertical and horizontal directions
using the energy spectra analysis-ensemble average method. Engine condition: large
engine, utility port, 0-deg. orientation, shrouded valve and performance port, 0-deg.
orientation, shrouded valve ..............................................................................................143
Figure 5.33: Turbulence Reynolds number versus mean piston speed in the vertical and
horizontal directions using the energy spectra analysis-ensemble average method. Open
symbols: small engine, filled symbols: large engine. Engine conditions: Utility port, (a)
SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e)
NV, 0-deg., (f) NV, 90-deg ..............................................................................................145
Figure 5.34: Kolmogorov lengthscales versus mean piston speed in the vertical and
horizontal directions using the energy spectra analysis-ensemble average method. Open
symbols: small engine, filled symbols: large engine. Engine conditions: Utility port, (a)
SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e)
NV, 0-deg., (f) NV, 90-deg ..............................................................................................148
Figure 5.35: Model and calculated one-dimensional energy spectra in the vertical
direction using the spatial-average method to determine the mean velocity field for three
cutoff frequencies. Engine condition: utility port, 0-degree orientation, shrouded valve,
(a) large engine at 1200 rpm and (b) small engine at 1200 rpm ......................................150
Figure 5.36: Longitudinal integral lengthscales in the horizontal and vertical directions
using the energy spectra analysis, spatial-average method. (a) L11 versus fc, (b) L11/hTDC
versus fc, and (c) L11/hTDC versus fc*hTDC. Engine condition: Utility port, shrouded valve,
0-degree orientation, all engine speeds ............................................................................152

xx
Figure 5.37: Longitudinal integral lengthscales in the horizontal and vertical directions
calculated using the energy spectra analysis, spatial-average method. Open symbols:
small engine, filled symbols: large engine. Engine conditions: Utility port, (a) SV, 0-
deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e) NV, 0-
deg., (f) NV, 90-deg .........................................................................................................154
Figure 5.38: Comparison of longitudinal integral lengthscales calculated using the
energy spectra and correlation lengthscale analyses with the spatial-average data. Engine
conditions: Utility port, 0-deg., (a) SV, horizontal direction, (b) SV, vertical direction,
(c) NV, horizontal direction, (d) NV, vertical direction ..................................................156
Figure 5.39: Comparison of longitudinal integral lengthscales calculated in the two high-
magnification FOVs versus mean piston speed in the vertical and horizontal directions
using the energy spectra analysis, spatial-average method. Engine condition: large
engine, (a) utility port, 0-deg. orientation, shrouded valve, and (b) performance port, 0-
deg. orientation, shrouded valve ......................................................................................157
Figure 5.40: Turbulence Reynolds number versus normalized cutoff frequency in the
vertical and horizontal directions (not specified) using the energy spectra analysis,
spatial-average method. Open symbol: small engine, filled symbol: large engine. Engine
conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance
port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg .......................................................159
Figure 5.41: Kolmogorov lengthscales versus normalized cutoff frequency in the vertical
and horizontal directions (not specified) using the energy spectra analysis, spatial-average
method. Open symbols: small engine, filled symbols: large engine. Engine conditions:
Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d)
SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg .....................................................................161
Figure 5.42: Kolmogorov lengthscales versus mean piston speed for fc*hTDC = 0.7 in the
vertical and horizontal directions using the energy spectra analysis, spatial-average
method. Open symbol: small engine, filled symbol: large engine. Engine conditions:
Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d)
SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg .....................................................................164

xxi
Figure 5.43: Kolmogorov lengthscales versus mean piston speed for fc*hTDC = 1.7 in the
vertical and horizontal directions using the energy spectra analysis, spatial-average
method. Open symbol: small engine, filled symbol: large engine. Engine conditions:
Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d)
SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg .....................................................................166
Figure 5.44: Normalized longitudinal integral lengthscales found using the correlation
analysis versus energy spectra analysis for the ensemble average method data. All engine
conditions. Open symbols: small engine, filled symbols, large engine ..........................169
Figure 5.45: Normalized longitudinal integral lengthscales found using the correlation
analysis versus energy spectra analysis for the spatial-average method data at fc*hTDC =
1.7. All engine conditions. Open symbols: small engine, filled symbols, large
engine ...............................................................................................................................170
Figure 5.46: Ratio of L11/£ versus Rλ from (a) model spectrum [60] and (b) for all engine
conditions using model spectrum analysis with ensemble-average data .........................173
Figure 5.47: Re£ from model spectrum versus ReL11 from correlation analysis for all
engine conditions with ensemble-average data ................................................................174
Figure 5.48: Rλ calculated using the energy spectra analysis, ensemble average method
versus Z. Open symbol: small engine, filled symbol: large engine. (a) Vertical direction,
(b) horizontal direction. Small engine Rλ multiplied by the scaling factor 1.69, (c)
vertical direction, (d) horizontal direction .......................................................................177
Figure B.1: Large engine performance intake port engineering drawing .......................191
Figure B.2: Side close-up view detailing flow path of large engine performance intake
port ...................................................................................................................................192
Figure B.3: Large engine utility intake port engineering drawing..................................193
Figure B.4: Side close-up view detailing flow path of large engine utility intake
port ...................................................................................................................................194

xxii
Figure B.5: Back close-up view detailing flow path of large engine utility intake
port ...................................................................................................................................195
Figure C.1: Flow coefficients versus crank angle degrees of performance port with non-
shrouded valve in the (a) 0- and (b) 90-degree orientations and (c) shrouded valve in 0-
degree orientation.............................................................................................................197
Figure C.2: Flow coefficients versus crank angle degrees of utility port with non-
shrouded valve in the (a) 0- and (b) 90-degree orientations and (c) shrouded valve in 0-
degree orientation.............................................................................................................198
Figure C.3: Flow coefficients versus crank angle degrees of exhaust ports ...................198
Figure C.4: Uncertainty on the sample mean flow coefficients for the performance ports,
90-degree orientation, non-shrouded valves ....................................................................200
Figure C.5: Uncertainty on the sample mean flow coefficients for the utility ports, 90-
degree orientation, non-shrouded valves .........................................................................201
Figure C.6: Uncertainty on the sample mean flow coefficients for the utility ports, 0-
degree orientation, shrouded valves .................................................................................202
Figure D.1: Uncertainty of the sample mean swirl coefficients for the utility ports, 0-
degree orientation, shrouded valves .................................................................................206
Figure D.2: Uncertainty of the sample mean swirl coefficients for the performance ports,
0-degree orientation, non-shrouded valves ......................................................................207

xxiii
LIST OF TABLES
Table 3.1: Dimensions of the large and small engines .....................................................30
Table 3.2: Engine head dimensions ..................................................................................35
Table 3.3: Important valve lift timing events, 0° is TDC of the intake stroke. Crank angle
degree of valve open and valve close events reported at 5% of peak lift ..........................35
Table 4.1: Dimensions of swirl adapter fixtures ...............................................................55
Table 4.2: Dimensions of tumble adapter fixtures ............................................................55
Table 4.3: Intake port mass-weighted average flow coefficients and uncertainties of the
small and large heads in the 0- and 90-degree port orientations ........................................58
Table 4.4: Exhaust port mass-weighted average flow coefficients...................................59
Table 4.5: Dimensions of the zero- and known-swirl references ......................................65
Table 4.6: Intake port swirl ratios and uncertainties of the small and large heads in the 0-
and 90-degree port orientations .........................................................................................75
Table 5.1: Crank angle degree of peak pressure relative to TDC of compression stroke
listed at the engine mean piston speed ...............................................................................83
Table 5.2: PIV statistics for percentage of first-choice vectors for each engine and
FOV....................................................................................................................................88
Table 5.3: Longitudinal and transverse integral lengthscales averaged over all engine
speeds in the vertical and horizontal directions using the ensemble average method.
Dimensions in mm ...........................................................................................................119

xxiv
Table A.1: Intake non-dimensional valve lift profile between 105 and 270 crank angle
degrees. The intake and exhaust profiles are identical and symmetric about the peak lift,
such that the exhaust profile can easily be deduced from this table, the valve inner seat
diameter, and the peak lift locations found in Table 3.3 ..................................................189
Table C.1: Uncertainty of the sample mean flow coefficients for ports with non-shrouded
valves in 90-degree orientation ........................................................................................200
Table C.2: Uncertainty of the sample mean flow coefficients for utility ports with
shrouded valves in 0-degree orientation ..........................................................................202
Table D.1: Uncertainty of the sample mean swirl coefficients for the ports in the 0-
degree orientation.............................................................................................................206

xxv
NOMENCLATURE
Lower-case Roman
c air speed of sound
cL model energy spectrum constant
dI diameter of impulse torque meter honeycomb cells
dP diameter of paddle meter honeycomb cells
f£ model spectrum non-dimensional function
fη model spectrum non-dimensional function
hTDC TDC clearance
k turbulent kinetic energy
l length dimension
m mass flow rate
1,2/ Nt t-distribution test statistic
u fluctuating velocity
u’ turbulence intensity
u velocity vector
uCf flow coefficient uncertainty
uCf,avg mass-average flow coefficient uncertainty
uCs swirl coefficient uncertainty
uf fluctuation intensity
uRs swirl ratio uncertainty
uV mean voltage change uncertainty
Upper-case Roman
Ap piston area
Aref reference area
aTDC after Top Dead Center
Av valve inner seat area
B engine cylinder bore
bTDC before Top Dead Center
C model energy spectrum constant
Cf flow coefficient
Cf,avg mass-weighted average flow coefficient
fC sample mean flow coefficient
Cs swirl coefficient

xxvi
Ct tumble coefficient
CCW counter-clockwise
CW clockwise
D inner seat diameter
DI diameter of impulse torque meter honeycomb flow rectifier
DP diameter of paddle meter paddle wheel
DR diameter of swirl reference tubes
Dv valve head diameter
E11( 1) one-dimensional kinetic energy spectrum
EV exhaust valve
EVC exhaust valve close
EVO exhaust valve open
FFT fast-Fourier transform
FOV field-of-view
H swirl adapter fixture height
HI height of impulse torque meter honeycomb flow rectifier
HP height of paddle meter paddle wheel
HP horsepower
IFFT inverse fast-Fourier transform
IR intensity ratio
IV intake valve
IVC intake valve close
IVO intake valve open
L valve lift
£ lengthscale characteristic of large eddies
LR length of swirl reference tubes
LDA laser Doppler anemometry
LDV laser Doppler velocimetry
LFE laminar flow element
N number of samples/measurements/images etc.
Nc number of cycles
Ncolumns number of columns of PIV data
NV non-shrouded valve
P pressure
PP performance port
PIV particle image velocimetry
PLIF planar laser induced fluorescence
R2 fixture offset from the centerline of the cylinder bore
Rλ Taylor-scale Reynolds number

xxvii
Re£ turbulence Reynolds number
RMS root mean squared
RPM rotations per minute
S engine piston stroke
SCf flow coefficient sample standard deviation
SCs swirl coefficient sample standard deviation
SR flow straightener length
SV voltage change sample standard deviation
SV shrouded valve
S/N signal-to-noise ratio
T torque
Teq equivalent torque
TDC top dead center
U instantaneous velocity
U mean velocity
CRU cycle-resolved mean velocity
EAU ensemble average velocity
UP utility port
V torque sensor mean voltage change
V velocity
VB Bernoulli velocity
Vdisp displaced cylinder volume
Vmps mean piston speed
Vps instantaneous piston speed
Z inlet valve Mach index
Lower-case Greek
α probability of making a type-I error
ε rate of dissipation
η Kolmogorov lengthscale
ηV volumetric efficiency
κ wavenumber
κ1 one-dimensional wavenumber
μ viscosity of air
ν kinematic viscosity
θ crank angle
θR angle of reference tube
xxviii
ρ density of air
ρ11 longitudinal correlation coefficient
ρ22 transverse correlation coefficient
ω paddle wheel angular velocity
Upper-case Greek
Ω angular velocity magnitude
ΩEngine engine angular rotation rate

1
CHAPTER 1
INTRODUCTION
1.1. Motivation
The motivation for this investigation is to study the fundamentals of engine size-
and speed-scaling effects and how they influence the in-cylinder velocity, turbulence, and
mixing. The principle of similitude of internal combustion engines has been promulgated
for many years [1-2]. Speed-scaling laws have been proposed and tested by various
authors [3-10] and size-scaling investigations have been performed [11, 12]. Although
these studies have provided useful information, there have been no studies performed to
the authors‟ knowledge that have thoroughly investigated size-scaling effects from a
fundamental point-of-view.
The development of engines is time consuming and difficult, and relies critically
on the evolution of existing designs. The problem becomes more difficult when the size
of the engine is changed significantly, i.e. when one tries to adapt a well-designed engine
to a new size. The current investigation is directly testing the engine size- and speed-
scaling effects. The results will be used by small engine manufacturers as a guide to
better predict the resulting fluid turbulence, mixing, and combustion when developing a
new engine. This will help small engine manufacturers reduce new engine development
time and costs.

2
1.2. Objective
The objectives of this research are to experimentally investigate the effects of
size-scaling on such parameters as turbulence intensity and mixing and to verify the
existing speed-scaling relations on the same engines. This was accomplished by first
designing and fabricating two scaled, optically accessible, motored engines. Particle
image velocimetry (PIV) experiments were conducted in both engines during the
compression stroke to measure the velocity field in a plane parallel to and below the
engine head. Turbulence statistics were computed from the velocity field data. The
turbulence statistics are compared between the two scaled engines.
1.3. Outline
This thesis is divided into 6 chapters. Chapter 2 contains a review of the various
studies that have been previously performed related to internal combustion engine size-
and speed-scaling. Chapter 2 also contains a review of the relevant papers related to
turbulence measurements and analysis in engines. Chapter 3 details the geometry of the
engines used in this study and the experimental setup. Chapter 4 contains steady flow
bench data characterizing the engine heads. Chapter 5 describes the PIV experiments
performed and the resulting data analysis. Chapter 6 is a summary and conclusion of this
study.

3
CHAPTER 2
REVIEW OF LITERATURE
The following presents a review of the various studies that have been performed
and the theory related to internal combustion engine flow field size-scaling, speed-
scaling, and turbulence.
2.1. Principle of Similitude
Internal combustion engine size-scaling is best understood by first applying the
principle of similitude, which has been applied to machinery of various types over the
years. Some of the early studies applying this principle to internal combustion engines
can be found in [1, 2]. In general, similar engines have their respective parts made of the
same materials and have linear dimensions that are proportional. The ratio of the lengths
of similar parts is the same, regardless of the part; consequently similar engines are scale
reproductions of each other. Thus, the stroke-to-bore and compression ratios are equal,
the mean flow velocities through the valve ports are equal for equal mean piston speeds,
and the volumetric efficiencies and gas pressures are equal [2].
The rate at which combustion occurs in an internal combustion engine has long
been understood to depend on the in-cylinder mixture turbulence. As stated in [2],
similar engines should have the same turbulence with the same piston speed, which
indicates the same rate of combustion. The time required for combustion is proportional
to the length of flame travel. The crank angle period required for combustion is then
proportional to the combustion time multiplied by the engine revolution rate, which is

4
equal to a constant. Thus, the crank angles required for combustion and the losses due to
combustion times should be the same in similar engines at the same piston speed [2].
2.2. Engine Size-Scaling
The topic of how engine size-scaling affects engine performance holds much
importance. Engine unit size, which is closely related to how much power can be
produced, is one of the main parameters addressed by an engine designer when first
designing a new engine. A better understanding of how the engine processes scale aids
the designer in making sound engineering decisions that reduce development time and
expenses.
While the similitude of engines is well understood, and the theory behind it is
capable of mathematical proof, to the author‟s knowledge, there has only been one
research study conducted directly testing the effect of size on performance of similar
spark-ignition internal combustion engines. In the research paper [11], and later in a
book on the subject of internal combustion engines [12], the author C.F. Taylor describes
a study undertaken at the Massachusetts Institute of Technology to better understand
engine size-scaling. In the study, three similar single-cylinder engines were built using
the same scaled drawing as shown in Fig. 2.1.

5
Figure 2.1: MIT similar engine design, from [12].
The engines had cylinder bores of 2.5, 4.0, and 6.0 inches. The operating variables that
were held the same between the engines included the inlet air pressure and temperature,
exhaust pressure, the fuel-air ratio and coolant supply temperature.
The first topic that was investigated in this study was the air flow. Since the
speed of sound is the limiting gas velocity at the smallest cross section of a flow system,
when pressures and temperatures on the upstream side of this section are the same (and
shapes are the same), maximum mass flow will be proportional to the square of the
typical dimension [11]. In the case of internal combustion engines, the inlet-valve

6
opening is usually the smallest cross-sectional area. Also, for flows less than critical,
Taylor argues that the previous considerations suggest that a Mach index which defines
the relation of flow velocity to sound velocity will have great importance.
Using dimensional analysis, Taylor states that for a series of similar engines
operating under similar conditions, volumetric efficiency is a function of two non-
dimensional parameters, the Mach Index defined as:
c
Vmps (2.1)
where Vmps is the mean piston speed and c is the speed of sound in air at the inlet
conditions, and the Reynolds Index defined as:
lVmps (2.2)
where l is a typical length dimension, and μ is the viscosity of air at inlet conditions. It
might be inferred that, in reciprocating engines, variations in viscous forces and in heat
transfer coefficients, which depend on the Reynolds number, will be of considerably less
importance than the forces due to inertia of the gas, which are dependent upon the Mach
number [11]. Figure 2.2 shows that for the three similar engines, the volumetric
efficiency is only a function of the mean piston speed (or the Mach Index as the speed of
sound in air is the same at the same temperature). Similar engines running at the same
values of mean piston speed and at the same inlet and exhaust pressures, inlet
temperature, coolant temperature, and fuel-air ratio will have the same volumetric
efficiency within measurable limits [12]. It was also noted that this trend would not hold
unless the connected inlet and exhaust systems are similar due to differences in pressure-
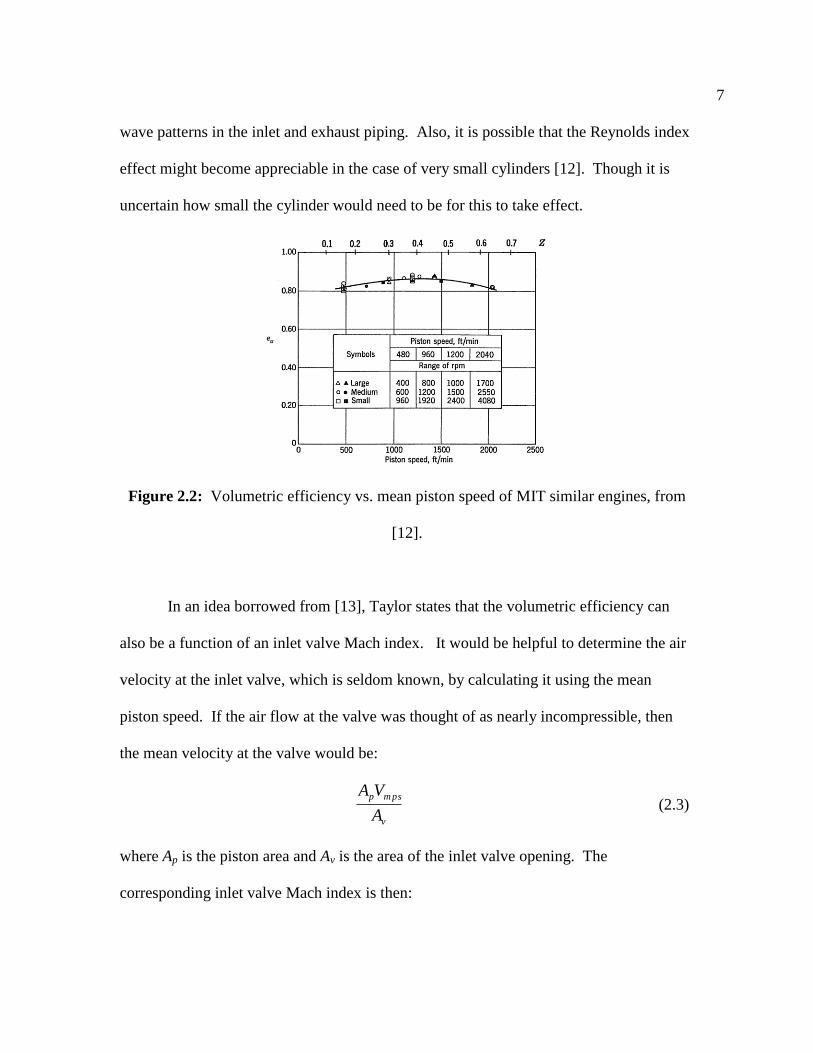
7
wave patterns in the inlet and exhaust piping. Also, it is possible that the Reynolds index
effect might become appreciable in the case of very small cylinders [12]. Though it is
uncertain how small the cylinder would need to be for this to take effect.
Figure 2.2: Volumetric efficiency vs. mean piston speed of MIT similar engines, from
[12].
In an idea borrowed from [13], Taylor states that the volumetric efficiency can
also be a function of an inlet valve Mach index. It would be helpful to determine the air
velocity at the inlet valve, which is seldom known, by calculating it using the mean
piston speed. If the air flow at the valve was thought of as nearly incompressible, then
the mean velocity at the valve would be:
v
m psp
A
VA (2.3)
where Ap is the piston area and Av is the area of the inlet valve opening. The
corresponding inlet valve Mach index is then:

8
cA
VA
v
m psp (2.4)
If the mean flow area through the inlet valve is proportional to πD2/4, where D is the
valve inner seat diameter, then the inlet valve Mach index can be written as:
cD
VB mps
2
2
(2.5)
where B is the cylinder bore dimension.
To test this new Mach index in [13], a single engine was equipped with several
inlet valve sizes, lifts, and shapes, valve timing being held constant. Shown in Fig. 2.3
are the test data showing volumetric efficiency versus the inlet valve Mach index. The
correlation was poor, so the flow coefficients were found at various lifts under low
velocity, steady flow conditions. A mean inlet flow coefficient, Cf,avg, was then obtained
by averaging the steady-flow coefficients obtained at each lift over the actual curve of lift
versus crank angle used in the tests [12]. Cf,avg is a mass-weighted average and is found
by summing at each crank angle, θ, the steady-flow coefficient, Cf, multiplied by the
mass flow rate, m , found from the steady flow tests divided by the sum of the mass flow
rate at each crank angle.
m
mC
Cf
avgf
, (2.6)
A new inlet valve Mach index was defined as:
cCD
VBZ
avgf
m ps
,2
2
(2.7)

9
Figure 2.3: Volumetric efficiency vs. a preliminary Mach index, from [13].
Figure 2.4 shows the volumetric efficiency plotted versus Z containing the same data as
from Fig. 2.3. This shows that the volumetric efficiency is a unique function of Z over
the wide range of engine speeds and engine parameters tested. Applied to engine-scaling,
similar engines run at the same mean piston speed and at the same inlet air temperature
will have the same value of Z, the inlet valve Mach index, and thus the same volumetric
efficiency, as long as the mean inlet flow coefficients are the same. Thus, steady flow
testing and calculation of this mean inlet flow coefficient can be a good indicator of how
closely the volumetric efficiency will match among similar engines.

10
Figure 2.4: Volumetric efficiency vs. a modified Mach index, from [13].
Another important result from Taylor‟s work concerns the indicated mean
effective pressure of similar engines. At the same volumetric efficiency and fuel-air
ratio, indicated mean effective pressure will be the same, provided thermal efficiency is
the same [11]. Since a larger cylinder has a greater volume-to-surface ratio, it could be
expected that the larger engines in this study would then have lower heat losses and a
higher thermal efficiency compared to the smaller engines. Figure 2.5 shows the results
of indicated mean effective pressure versus mean piston speed for the three similar
engines. Apparently, with the range of size of engines tested for this study, the
differences in thermal efficiency is smaller than measurement uncertainty and the curves
are equal.

11
Figure 2.5: Indicated mean effective pressure vs. mean piston speed of MIT
geometrically similar engines, from [11].
Finally, Taylor plotted the pressure traces from the three similar engines, shown
in Fig. 2.6. Again, the operating conditions were held the same and data were taken at
the same mean piston speed. The traces are said to be the same within the accuracy of
the measurements.
Figure 2.6: Pressure traces of MIT geometrically similar engines, from [11].

12
While Taylor‟s investigation was very thorough and covered the basics of how
engines scale, there is much information that is lacking and many topics that could have
been further explored. There is no information given on the geometry of the intake port
or their effect on the flow into the engine cylinder. There are many types of port
configurations that can affect variables such as tumble, swirl, and volumetric efficiency.
These all have an effect on the resulting fluid mechanics and turbulence which in turn
affect combustion and performance.
2.3. Engine Speed-Scaling
The effect of engine speed on the fluid turbulence in-cylinder has been an area of
much research. With the development and subsequent wide-spread use of such
measurement techniques as hotwire anemometry and laser Doppler anemometry (LDA)
in the 1970‟s, it became possible to make limited measurements of the flow field inside
the engine cylinder. This has helped to enhance our understanding of the in-cylinder
large-scale bulk fluid motion as well as the small-scale turbulence. Understanding how
the fluid turbulence scales with the engine speed is essential in determining combustion
rates and performance as turbulent flame speed is related to fluid turbulence.
There have been a number of studies looking at the relation between the turbulent
flame speed and the turbulence intensity. In [14], in which turbulence in a motored
engine was compared with combustion in the same engine, they determined that a flame
speed ratio, the ratio of the turbulent to the laminar flame speed, was a linear function of
the turbulence intensity. In [15], hotwire turbulence measurements were compared with
burning velocities computed from pressure-time data over a range of engine speeds and

13
spark-timing to develop an equation that showed a linear relation between the flame
speed ratio and turbulence intensity. Since the turbulent flame speed is a function of
turbulence intensity, it is important to understand how the turbulence scales with the
engine speed.
There have been many studies that have used hotwire anemometry and laser
Doppler anemometry to make fluid measurements in-cylinder and have investigated
engine speed-scaling. The purpose of some studies was to investigate and verify speed-
scaling relations, while other studies with differing objectives have reported their findings
related to speed-scaling. The following is a review of the relevant papers on this topic,
which include the important data and speed-scaling relations.
One of the earlier papers to take fluid measurements with hotwire anemometry
and to vary the speed of a motored engine was published by Witze [3]. His engine was
outfitted with various access ports in which to insert the hotwire anemometer probe.
One-dimensional velocity measurements were obtained at a single point slightly below
the deck of the engine head. An ensemble average velocity was calculated for N discrete
velocity measurements as:
N
EA UN
U )(1
)( (2.8)
where U is the instantaneous velocity and θ is a specified crank angle. The fluctuating
component of velocity was then calculated as:
)()()( EAUUu (2.9)
and a fluctuation intensity was defined as:

14
)()( 2uu f (2.10)
Velocity data were acquired at engine speeds ranging from 500 to 2500 RPM. Figure 2.7
shows the turbulence intensity (denoted as turbulence intensity, but whose definition is
consistent with fluctuation intensity) normalized by the mean piston speed versus crank
angle. It is seen that it is a good first-order approximation to assume the mean velocity
and turbulence intensity to be linearly proportional to engine speed [3]. The author does
not conclude what the proportionality constant might be, but makes the generalized
statement that the turbulence intensity varies linearly with mean piston speed.
Figure 2.7: Variation with engine speed of the turbulence intensity normalized by the
mean piston speed, from [3].
A subsequent paper that made use of laser Doppler anemometry to make velocity
measurements in-cylinder of a motored engine was published by Rask in [4]. Similar to

15
Witze‟s study, Rask made single-component velocity measurements at a single point
below the engine head deck while varying the rotational speed of the engine. An
ensemble average velocity and a fluctuation intensity (also referred to as an RMS
velocity fluctuation) were calculated in the same manner as done by Witze. Shown in
Fig. 2.8 are the results, with the RMS velocity fluctuation normalized by the mean piston
speed versus the crank angle for three different engine speeds. As can be seen, there is
very good agreement throughout the compression stroke for the range of engine speeds
investigated. It was concluded that the RMS velocity fluctuation appear to scale well
with engine speed.
Figure 2.8: Variation with engine speed of the RMS velocity fluctuation normalized by
the mean piston speed, from [4].
Liou and Santavicca [5] made laser Doppler velocimetry (LDV) measurements in
a motored engine both with and without significant swirl. Single-component velocity
measurements were made at multiple points in a plane at the center of the TDC clearance
height. For this study, the velocity measurement data rates were sufficiently high to
enable the calculation of a cycle-resolved mean velocity. Measurements were taken at

16
approximately one-degree crank angle windows. A Fourier transform of the velocity
versus time was taken, transforming the data into the frequency domain. A cut-off
frequency was chosen based on the upper frequency limit of the ensemble averaged
velocity frequency spectrum. Turbulence frequency components that lay above the cut-
off frequency were set to zero, and the inverse transform taken to yield the mean velocity
in each cycle. The cycle-resolved mean velocity is expected to be closer to the true mean
velocity than the ensemble average velocity as the ensemble average velocity is
influenced by the cycle-to-cycle variation in the bulk flow. The fluctuating component of
velocity was calculated as:
)()()( CRUUu (2.11)
where CRU is the cycle-resolved mean velocity. The turbulence intensity was then
calculated using the cycle-resolved fluctuating component of the velocity. Thus, the
turbulence intensity is usually smaller than the fluctuation intensity as it does not include
cyclic variations in the bulk flow. However, it is also dependent on the choice of an
appropriate cut-off frequency when calculating the cycle-resolved mean velocity.
Figures 2.9-2.12 show the results from [5]. Figures 2.9 and 2.10 plot the
turbulence intensity averaged from the measurements at four points in the engine cylinder
versus crank angle for three different engine speeds, with no significant swirl (Fig. 2.9)
and with significant swirl (Fig. 2.10). The magnitude of the turbulence intensity is seen
to be greater with swirl than without swirl. Figure 2.11 shows the turbulence intensity at
TDC versus engine speed for the cases with and without swirl. It is seen that the
turbulence intensity near TDC is found to scale approximately linearly with RPM (also

17
with mean piston speed, not shown) both with and without swirl. Also shown in Fig.
2.12 is the RMS of the difference between the cycle-resolved mean velocity and the
ensemble averaged velocity. This indicates that in cases with less bulk fluid motion, such
as without swirl, the difference between the cycle-resolved mean velocity and an
ensemble averaged velocity will be greater than with swirl. Therefore, one must be
careful when making comparisons between the fluctuating intensity of cases with and
without significant bulk fluid motion and must account for variations in the ensemble
averaged velocity.
Figure 2.9: Turbulence intensity versus crank angle without swirl, from [5].
Figure 2.10: Turbulence intensity versus crank angle with swirl, from [5].

18
Figure 2.11: TDC turbulence intensity versus engine speed with and without swirl, from
[5].
Figure 2.12: TDC ensemble averaged cyclic variation, from [5].
One of the most fundamental investigations and collection of information related
to the speed-scaling of engines is found in [7]. In this paper, the authors collected the
speed-scaling data from seven previous investigations conducted between 1973 and 1980.
The data from this collection were taken in motored two-valve engines with various
geometries, with pancake and wedge-type pistons, over a wide range of RPMs and

19
compression ratios, and with and without swirl. The data were acquired by taking either
hotwire anemometry or laser Doppler anemometry measurements and ensemble
averaging of the velocity was used to ultimately determine the fluctuation intensity.
The authors of [7] also conducted a speed-scaling investigation using two separate
motored engines, one with four valves and no swirl and the other ported, both with and
without swirl. Single- and two-component velocity data were acquired using laser
Doppler anemometry at multiple locations in the clearance volume in the ported engine
and at a single location in the four valve engine. The data were acquired at high enough
rates in order to compute a cycle-resolved mean velocity and the turbulence intensity. As
shown in Fig. 2.13, the authors computed and plotted both the fluctuation intensity and
turbulence intensity versus crank angle. Once again, we see there is a larger difference
between the fluctuation intensity and turbulence intensity when there is no bulk organized
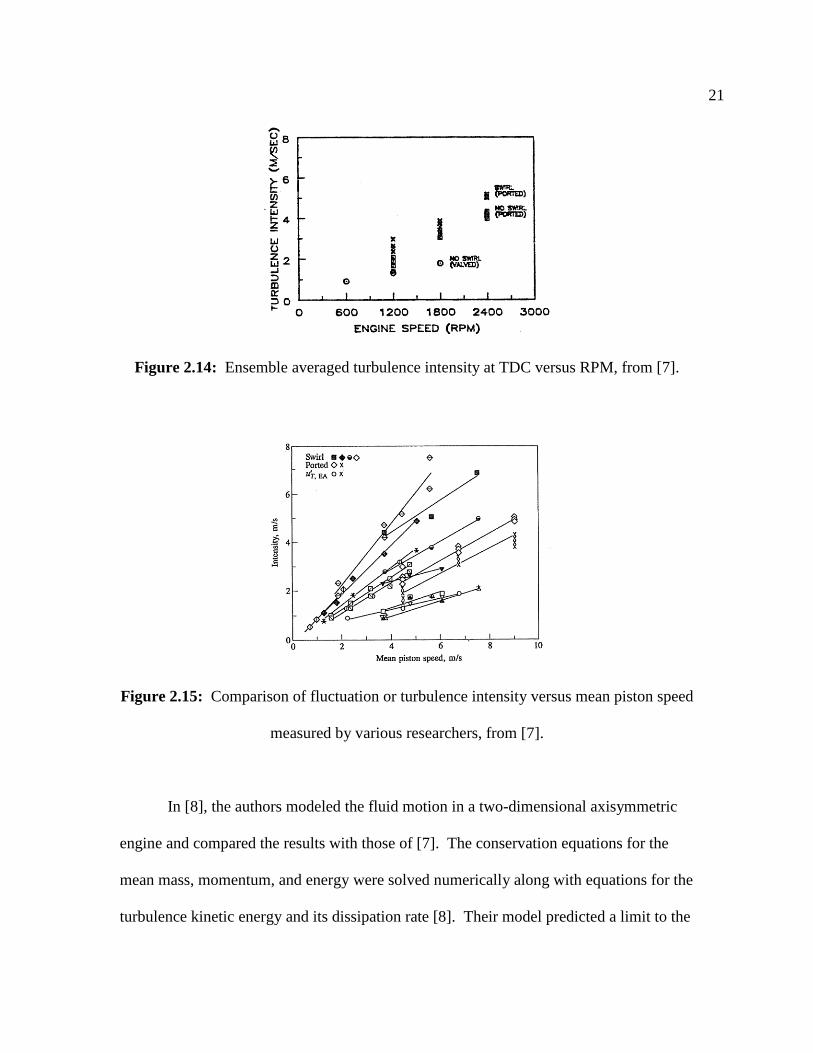
fluid motion as in the no swirl case. Figure 2.14 shows the turbulence intensity versus
engine speed for the three engine configurations. As can be seen, there is clearly a
nearly linear relationship between the turbulence intensity and engine speed.
The authors of [7] then plotted the data of fluctuation intensity and turbulence
intensity versus mean piston speed from their study as well as from the previous
investigations they surveyed. Figure 2.15 shows these data and lines connecting the data
show the linear relationship that exists. The authors note that in the same engine, the
turbulence intensity is smaller without swirl than with swirl and that for the case without
swirl, their turbulence intensity would have been higher by a factor of two to three and
would have matched the other studies‟ highest reported intensities, had they similarly
defined turbulence as a fluctuation intensity. Also, the details of the intake system
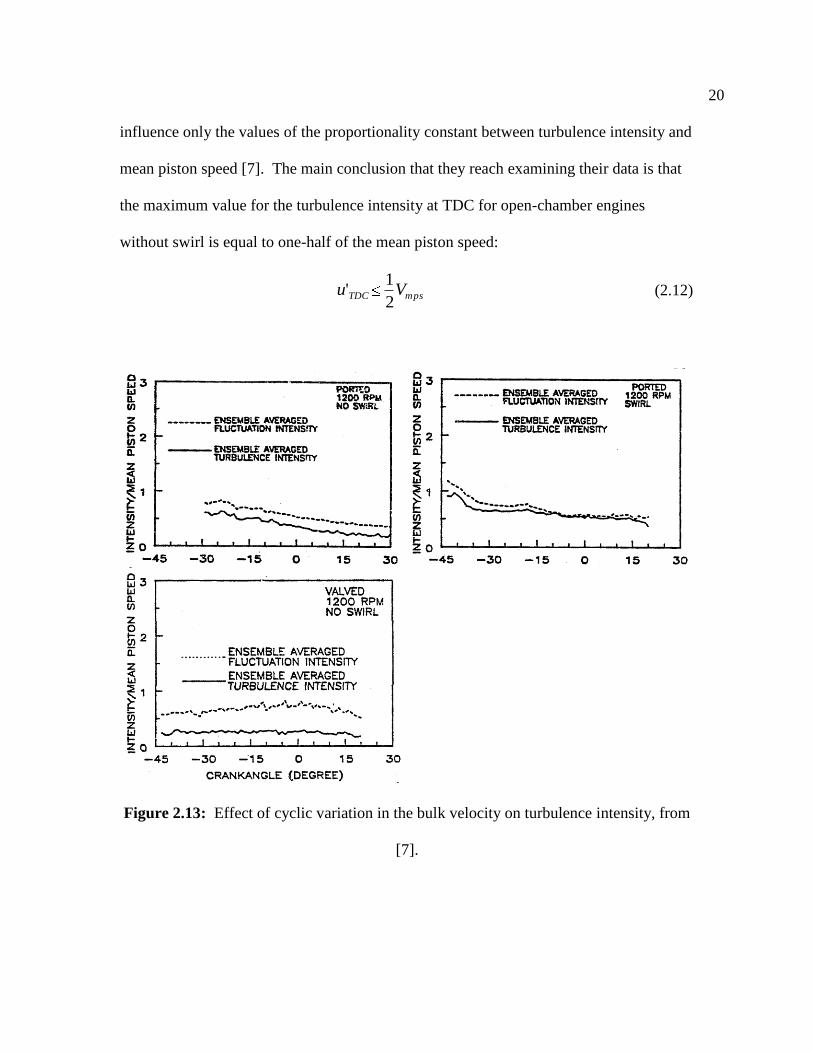
20
influence only the values of the proportionality constant between turbulence intensity and
mean piston speed [7]. The main conclusion that they reach examining their data is that
the maximum value for the turbulence intensity at TDC for open-chamber engines
without swirl is equal to one-half of the mean piston speed:
mpsTDC Vu2
1' (2.12)
Figure 2.13: Effect of cyclic variation in the bulk velocity on turbulence intensity, from
[7].
21
Figure 2.14: Ensemble averaged turbulence intensity at TDC versus RPM, from [7].
Figure 2.15: Comparison of fluctuation or turbulence intensity versus mean piston speed
measured by various researchers, from [7].
In [8], the authors modeled the fluid motion in a two-dimensional axisymmetric
engine and compared the results with those of [7]. The conservation equations for the
mean mass, momentum, and energy were solved numerically along with equations for the
turbulence kinetic energy and its dissipation rate [8]. Their model predicted a limit to the

22
value of the turbulence intensity at TDC due to the dominance of the turbulence
dissipation over the diffusivity of the turbulence generated by the intake process. Their
computations concluded the same speed-scaling relation as found in Eqn. (2.12).
In [9], LDA velocity measurements were made in a motored engine in the TDC
clearance mid-plane across a diameter of the cylinder. The authors thought previous
investigations that characterized the TDC turbulence on measurements made at a single
point in the engine cylinder were inadequate. In a two-valve engine with no swirl, they
took velocity measurements in the range from 300-2000 RPM and plotted the axial
turbulence intensity versus the mean piston speed from five distinct locations, as shown
in Fig. 2.16. They note a non-uniform distribution of the turbulence intensity along the
measurement plane with maximum values occurring towards the cylinder center.
Similarly, in cases with swirl, there seems to be higher intensities at the location of the
swirl center, as reported in [16-18]. There also seems to be an increase in non-uniformity
with an increase in engine speed as seen in Fig. 2.16.
Figure 2.16: Variation of axial turbulence intensity with engine speed at TDC, no swirl,
from [9].
23
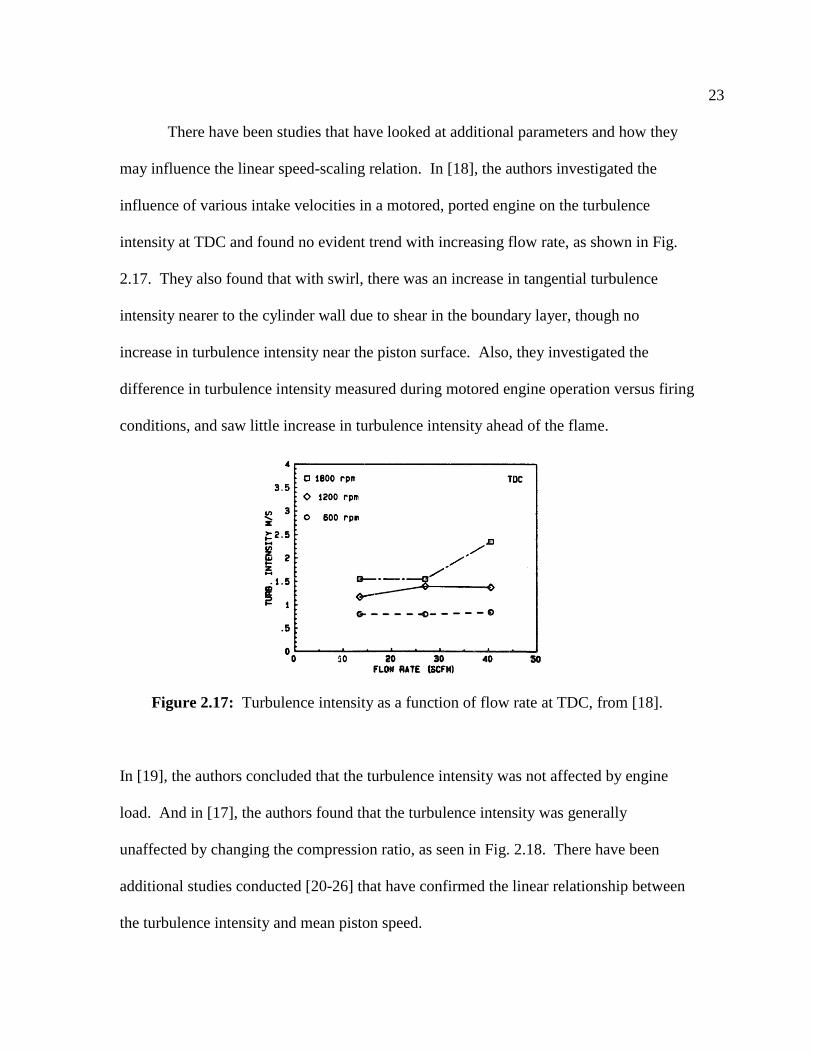
There have been studies that have looked at additional parameters and how they
may influence the linear speed-scaling relation. In [18], the authors investigated the
influence of various intake velocities in a motored, ported engine on the turbulence
intensity at TDC and found no evident trend with increasing flow rate, as shown in Fig.
2.17. They also found that with swirl, there was an increase in tangential turbulence
intensity nearer to the cylinder wall due to shear in the boundary layer, though no
increase in turbulence intensity near the piston surface. Also, they investigated the
difference in turbulence intensity measured during motored engine operation versus firing
conditions, and saw little increase in turbulence intensity ahead of the flame.
Figure 2.17: Turbulence intensity as a function of flow rate at TDC, from [18].
In [19], the authors concluded that the turbulence intensity was not affected by engine
load. And in [17], the authors found that the turbulence intensity was generally
unaffected by changing the compression ratio, as seen in Fig. 2.18. There have been
additional studies conducted [20-26] that have confirmed the linear relationship between
the turbulence intensity and mean piston speed.

24
Figure 2.18: Turbulence intensity as a function of compression ratio, modified from
[17].
There has been much research investigating the relation between turbulence
intensity and engine speed. As was shown in [7], at TDC in an engine without swirl, the
turbulence intensity can be equal to or less than half of the mean piston speed. While the
investigations conducted to date have provided many useful insights into this topic, they
are also lacking in some respects. Many of the investigations made velocity
measurements at either one or a limited number of points in the cylinder, which tends to
support the opinion that their conclusions were based off a limited, if not an insufficient,
amount of data. Many of the studies were performed with a fixed intake port geometry,
which limited varying the engine geometry and the investigation of the effects of such
parameters as tumble and swirl. There have also been no studies to date that have
investigated the linear speed-scaling relation as applied to engine size-scaling to see what
kind of correlation exists among exactly scaled engines. A study to fill in some of the
missing and inadequate information, where the previous studies have been insufficient,
would provide a wealth of information useful in the development of engines.

25
2.4. Measurement and Analysis of Turbulence Length Scales and Turbulent Spectra
in Engines
The characterization of the turbulence requires more than just the turbulence
intensity. Integral length scale measurements, which give an estimate of the size of
turbulent eddies in the flow, have been made in several studies. Many of the earlier
investigations used Taylor‟s hypothesis to indirectly calculate integral length scales [3,
27-29]. Time-varying velocity data were collected and Taylor‟s hypothesis used to relate
the time scales to length scales. However, the conditions for which Taylor‟s hypothesis
is valid are generally not satisfied in the non-stationary flow field of an internal
combustion engine. Direct measurements of the integral length scales have been
performed using multi-point LDV and PIV measurements [30-34]. Longitudinal length
scales were found to decrease during the compression stroke, where a minimum was
reached very near TDC. In one study [31] an increase in the longitudinal length scale
was observed with an increase in engine swirl ratio, while [35] observed an opposite
trend. Fraser et al. [32] measured the transverse length scale at a number of engine crank
angles and normalized the data by the instantaneous engine clearance height, shown in
Fig. 2.19. A maximum value of about 0.2 near TDC was observed and they reported
values ranging from 0.08-0.37 found by other investigators. However, the transverse
length scale magnitude depended on the data analysis method used in calculating the
mean flow velocity [33]. Fraser and Bracco [36] measured transverse length scales at
multiple places in-cylinder and in different directions. Their results supported the
conclusion of a high level of isotropy and homogeneity in engine turbulence.

26
Figure 2.19: Fluctuation integral length scale/instantaneous clearance height vs. crank
angle, from [32].
PIV has increasingly been used in the analysis of in-cylinder flows [26, 35, 37-
44]. Typically, a Reynolds decomposition of the flow field is performed to separate the
mean velocity from the fluctuating component. One of the challenges of data analysis in
engine flows is to define an appropriate mean velocity. The method used to calculate the
mean velocity field directly affects the subsequent analysis. Many data acquisition
systems are only fast enough to take a single set of PIV images per engine cycle. One
method of calculating the mean velocity field then is to acquire the velocity data at a set
crank angle for a large enough number of engine cycles. The data are then averaged over
all the cycles at each point to find an ensemble average [26, 35, 44]. Another method of
calculating the mean velocity field at a specified crank angle for each cycle is to perform
a spatially resolved analysis [37-39]. The two dimensional Fourier transform is
performed on the velocity field of an individual cycle, a filter is applied using an

27
appropriate cutoff length scale, and the inverse Fourier transform is performed resulting
in a filtered mean velocity field for that cycle. Sufficiently fast data acquisition systems
allow for a time-resolved mean velocity field to be calculated for an individual cycle
[40], as is performed with single-point LDV measurements.
PIV has been used to measure energy spectra in engines. The methods used to
calculate spectra vary. Funk et al [35] used the ensemble average method to determine
the mean and fluctuating velocity components in the flow field and these were then used
to calculate the mean kinetic energy and turbulent kinetic energy fields, respectively. A
low pass Gaussian weighted filter was applied to the data at different length scales to
determine the energy content at various length scales. Fajardo and Sick [41] used a
filtering method similar to [35], but filtered the instantaneous velocity fields, without
using a Reynolds decomposition, to determine an energy spectra. An alternative method
of calculating the energy spectra, found in [45], is used in the current study. This method
involves using a Reynolds decomposition to determine the fluctuating velocity fields and
then the turbulent kinetic energy fields. An interlacing technique [46] is then applied to
the turbulent kinetic energy fields to calculate the energy spectra versus wavenumber.
PIV has also been used to try to determine the Reynolds numbers of flows in
engines. Daneshyar and Hill [47] calculated a mean-flow Reynolds number of 12,000
using the spatial-mean swirl velocity from PIV data, the TDC clearance height, and an
assumed kinematic viscosity. Reuss et al [39] based a turbulence Reynolds number of
200 on the turbulence intensity estimated from their PIV measurements and a velocity
integral lengthscale found from two-point velocity-correlation measurements. Funk et al
[35] used large-Reynolds-number flow theory and the assumption that the equilibrium

28
range has been resolved in their measurements to base a turbulence Reynolds number off
the Kolmogorov and integral lengthscales. Fajardo and Sick [41] assumed a turbulent
Reynolds number on the order of 1,000 for their engine conditions to arrive at an estimate
of the Kolmogorov lengthscale on the order of 50μm. Thus, it is apparent that there have
been many procedures used to analyze PIV data that provide varying levels of agreement
in their results.

29
CHAPTER 3
EXPERIMENTAL SETUP
This chapter describes the engines and related systems used in this study.
3.1. Description of Engines
This study was conducted using two precisely scaled, single-cylinder, two-valve,
optical engines. The scaling factor between the two engines was 1.69, which was set by
the crank radius ratio between the two chosen engines. The larger of the two engines,
henceforth referred to as the “large engine,” is an existing single-cylinder, optical
research engine. The smaller engine, henceforth referred to as the “small engine,” is a
Kohler Courage XT-7 base engine that has been converted into a single-cylinder, optical
research engine. The dimensions of the engines are shown in Table 3.1. The connecting
rod to crank radius ratio is seen to differ slightly between the two engines (all other
geometric parameters are matched exactly), and this affects the profile of piston speed
versus crank angle. The instantaneous piston speed/mean piston speed ratio [48] as a
function of crank angle for the two engines is shown in Fig. 3.1, and Fig. 3.2 shows the
percent difference of these values for the small engine compared to the large engine,
which confirms that the difference in connecting rod to crank radius ratio causes a
negligible difference.

30
(Dimensions
in mm)
Connecting
Rod
Length
Crank
Radius
Connecting
Rod to
Crank
Radius
Ratio
Bore,
B
Stroke,
S
Compression
Ratio
TDC
clearance
Large
Engine 144.8 38.0 3.81 82.0 76.0 10.0 8.44
Small
Engine 84.0 22.5 3.73 48.6 45.0 10.0 5.00
Table 3.1: Dimensions of the large and small engines.
0 30 60 90 120 150 1800
0.5
1
1.5
2
Crank Angle Degrees
Vps / V
mps
Large EngineLarge Engine
Small Engine Small Engine
Figure 3.1: Instantaneous piston speed/mean piston speed as a function of crank angle
for the small and large engines.

31
0 30 60 90 120 150 180-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
Crank Angle Degrees
Perc
ent D
iffe
rence
of V
ps / V
mps
Be
twe
en
La
rge
an
d S
ma
ll E
ng
ine
s
Figure 3.2: Percent difference of the instantaneous piston speed/mean piston speed
between the large and small engines.
3.2. Engine Heads
The large and small engine heads for this study were designed for ease of use and
so that a number of intake conditions could be easily investigated. The engine heads are
fabricated out of aluminum plates, onto which the intake and exhaust ports, valves,
springs, rocker arms, and camshaft are easily assembled. The intake ports are modular in
design and, on the bottom, feature a tongue and groove lip that mates with a counter-bore
on the aluminum plate. This feature allows the intake ports to be rotated 90 degrees
about the intake-valve axis. The exhaust ports were also modular in design for the reason
of ease of manufacturing, but were not meant to be rotated. The intake and exhaust ports
were secured to the base aluminum plate by the use of a port housing fixture and shim
plates. The port housing fixture assembles on the top of the ports and bolts onto the
aluminum plate; the shim plates are inserted between the housing fixture and the top of

32
the ports to effectively compress the assembly and keep the ports from rotating. Valves
can then be installed and the valve springs attach on top of the port housing fixture.
An assembly that includes the camshaft and rocker arms then bolts onto the back
side of the engine head. Two sealed cylindrical roller bearings mount onto either end of
the camshaft and are supported by two block assemblies that bolt directly to the engine
head aluminum plate. A rocker arm assembly bolts on top of the two blocks that hold the
camshaft. The rocker arm assembly consists of two rocker arms that secure to and rotate
about a rod by the use of two sealed ball bearings. At the front end of the rocker arms, an
adjustable lash screw pushes down on top of the valve stem. At the back end of the
rocker arms, a sealed needle roller bearing follower is attached and is acted upon by the
camshaft lobes. The use of the sealed bearings at all three locations in this assembly
eliminates the need for splash lubrication of the engine head. The same camshaft and
rocker arm assembly is used in both the large and small engine heads. The assembly is
modified slightly for the small engine head so that the valve lift profile is appropriately
scaled. This is accomplished by extending the back end of the rocker arms and moving
the axis about which the rocker arms rotate relative to the axis about which the camshaft
rotates. Figure 3.3 details the small and large engine heads.

33
Port HousingFixtures
Shim Plate Shim Plate
Intake Port
Exhaust Port
Rocker ArmsCamshaft Blocks
Flowbench Intake Horn
Aluminum Base Plate
Spring and Valve
Figure 3.3: Small engine head (left side) and large engine head.
The geometry of the valve and seat are shown in Fig. 3.4. Table 3.2 includes the
dimensions shown in Fig. 3.4. Both regular (non-shrouded) and shrouded intake valves
were used to study varying levels of swirl. Throughout this thesis the non-shrouded
valve will be abbreviated as NV, and the shrouded valve as SV. The shrouded valve
features a 180-degree cylindrical shroud. It should also be noted that when the intake and
exhaust valves are fully closed, the surface of the valve head is flush with the engine head
surface. The engine cylinder then closely approximates a right cylinder, with a flat piston
and engine head surface. There are a number of reasons to make the engine head surface
flat. First, it makes it easy for the person cutting the valve seat inserts to make the proper
cut. Checking that the valves are flush with the head ensures that the valve lift profiles
are properly scaled. Second, in industry there are various valve head geometries and the
valve can either sit flush with the head or can protrude at different distances. As optical
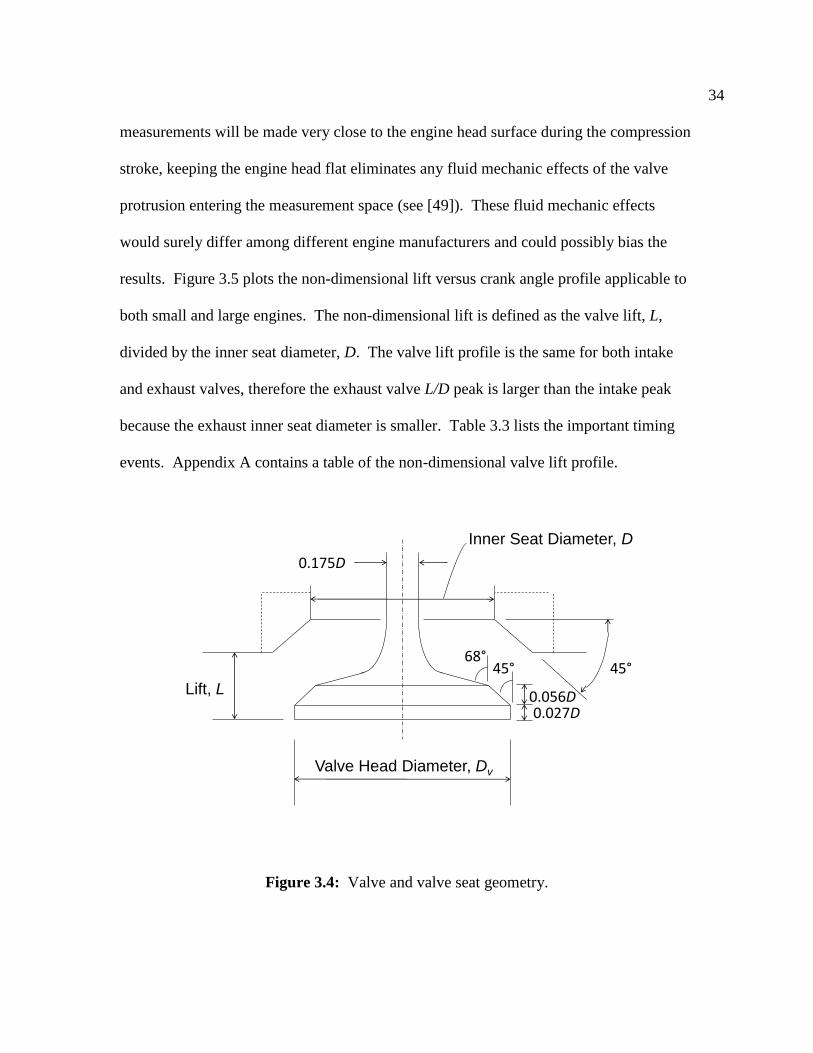
34
measurements will be made very close to the engine head surface during the compression
stroke, keeping the engine head flat eliminates any fluid mechanic effects of the valve
protrusion entering the measurement space (see [49]). These fluid mechanic effects
would surely differ among different engine manufacturers and could possibly bias the
results. Figure 3.5 plots the non-dimensional lift versus crank angle profile applicable to
both small and large engines. The non-dimensional lift is defined as the valve lift, L,
divided by the inner seat diameter, D. The valve lift profile is the same for both intake
and exhaust valves, therefore the exhaust valve L/D peak is larger than the intake peak
because the exhaust inner seat diameter is smaller. Table 3.3 lists the important timing
events. Appendix A contains a table of the non-dimensional valve lift profile.
Valve Head Diameter, Dv
Lift, L
Inner Seat Diameter, D
45°45°68°
0.027D0.056D
0.175D
Figure 3.4: Valve and valve seat geometry.

35
(Dimensions
in mm)
Intake
Valve
Diameter,
Dv
Exhaust
Valve
Diameter,
Dv
Intake
Inner
Seat
Diameter,
D
Exhaust
Inner
Seat
Diameter,
D
Intake
and
Exhaust
Maximum
Lift, L
Intake
Valve
Shroud
Height
Shroud
Outer
Diameter
Large
Engine
Head
35.0 28.0 31.8 25.4 7.9 8.6 29.4
Small
Engine
Head
20.7 16.6 19.1 15.1 4.7 5.1 17.4
Table 3.2: Engine head dimensions.
0.35
0.30
0.25
0.20
0.15
0.10
0.05
0.00
L/D
-360 -270 -180 -90 0 90 180 270 360
Crank Angle Degrees
Exhaust Intake
Figure 3.5: Intake and exhaust non-dimensional valve lift versus crank angle profiles of
both large and small engines.
EVO EVC EV Peak
Lift IVO IVC
IV Peak
Lift
Small and
Large
Head
-235° 25° -105° -25° 235° 105°
Table 3.3: Important valve lift timing events, 0° is TDC of the intake stroke. Crank
angle degree of valve open and valve close events reported at 5% of peak lift.

36
The intake ports were designed so that multiple conditions could be evaluated. As
mentioned previously, the intake ports are modular and feature a tongue and groove lip,
allowing them to be rotated about the valve axis. Figure 3.6 illustrates the two port
orientations that were tested. The 0-degree orientation, Fig. 3.6(a), has the port directed
tangentially relative to the near cylinder wall such that it would tend to produce a swirl-
dominated flow. The 90-degree orientation, Fig. 3.6(b), has the port directed
perpendicularly relative to the near cylinder wall such that it would tend to produce a
tumble-dominated flow. The shrouded valve was used only with the 0-degree orientation
while the non-shrouded valve was used with both 0- and 90-degree port orientations.
Cylinder Wall
Cylinder Axis
Exhaust Valve
Intake Valve
Intake Port
Shroud
Intake ValveIntake Port
90°
Cylinder Wall
Cylinder Axis
Exhaust Valve
(a) (b)
Figure 3.6: Top view of engine showing (a) 0-degree and (b) 90-degree port orientations
with respect to engine cylinder.
Two different intake port geometries were designed for this investigation. Engine
port geometry will vary among manufacturers and can be influenced by such factors as
intended use, performance, manufacturing cost, and manufacturing processes. The ports

37
designed for this study were based on geometries common to the companies that
supported this research. Figure 3.7 shows the solid model cross-section for the two ports,
the green highlighted region shows the flow path. Detailed engineering drawings of the
ports can be found in Appendix B. Figure 3.7(a) shows the port termed the performance
port, referred to hereafter as PP. This port design would be found in higher performance
engines as it tends to increase volumetric efficiency and promotes strong organized in-
cylinder flows. The angle between the port inlet and the port bottom surface was 35
degrees. Other dimensions were based on guidelines to maximize volumetric efficiency
provided in [50]. Figure 3.7(b) shows the port termed the utility port, referred to
hereafter as UP. This port design would be found in utility-type engines such as
lawnmowers or generators where design is based to a greater degree on ease and cost of
manufacturing. This port is based on a Kohler CH-14 engine port, with the inlet parallel
to the port bottom surface and a 90 degree bend at the outlet.
(a) (b)
Figure 3.7: Intake port geometries of the (a) performance port and (b) utility port.

38
The ports were fabricated in two halves that bolt together to form the complete
port. This was done for two reasons. It made it is easier to machine the complex port
geometry. [It also makes it functionally possible to perform the planar laser-induced
fluorescence (PLIF) experiments to be discussed later.] Figures 3.8(a) and (b) show the
right half of the performance port and utility port, respectively. Highlighted in green is a
small groove machined into the port inner surface that mates with a divider plate, shown
in yellow. The divider plate position is just to one side of the valve guide. This makes it
possible to completely separate the port inner area into two flow paths, one path that can
be seeded with a fuel tracer needed for PLIF measurements and the other path left
unseeded.
(a)
(b)
Figure 3.8: (a) Performance port right half and (b) utility port right half showing
grooves that mate with a divider plate.

39
3.3. Engine Optical Access
The engines for this study are optically accessible, Bowditch-type single cylinder
research engines. A cross-sectional view of the large engine is shown in Fig. 3.9(a) and
the small engine in Fig. 3.9(b). The upper portion of the cylinder is replaced with a
quartz ring window to allow the passage of a laser sheet into the cylinder. The ring
window for the large engine clamps between two plates and was designed this way such
that another investigation could use the assembly. The ring window for the small engine
clamps directly underneath the engine head such that measurements could be acquired
through TDC. The piston surface is flat and contains a centered, round sapphire window
that permits optical access to 53% of the cylinder bore (43.2 mm and 25.4 mm in
diameter for the large and small engines, respectively). An Edmund Optics UV-enhanced
imaging mirror sits at a 45-degree angle beneath the piston window, inside the Bowditch
piston, to allow visual access for a camera into the cylinder.
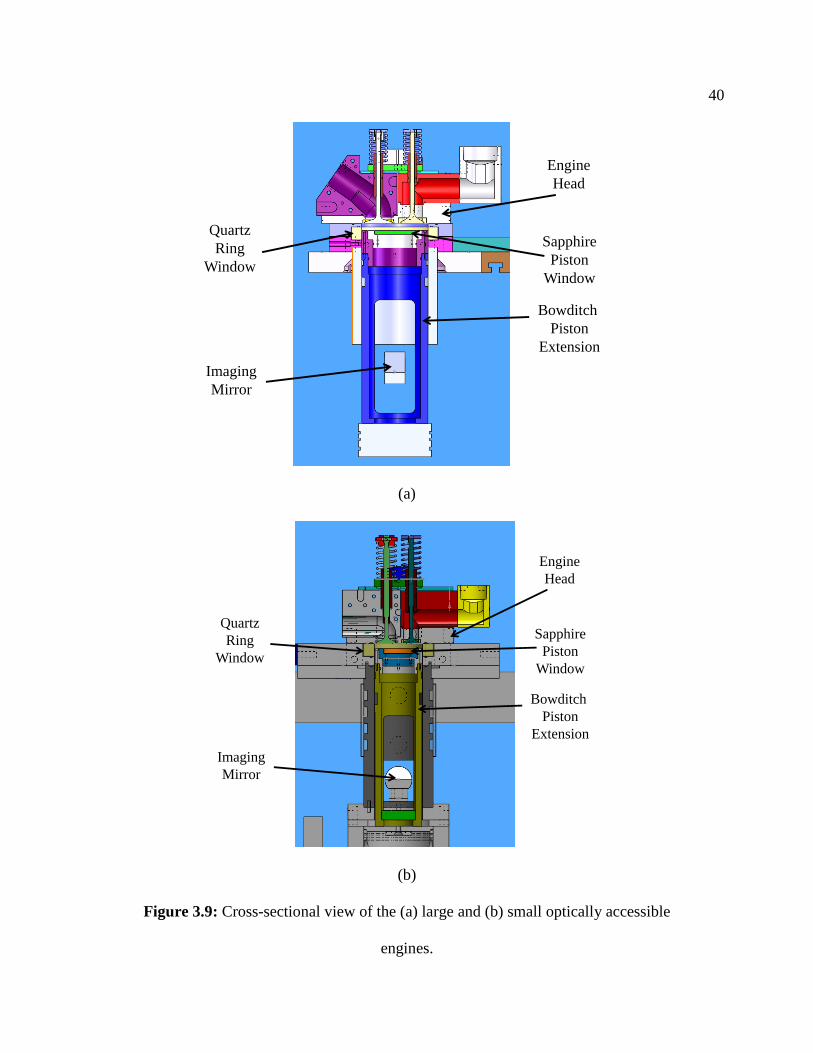
40
Imaging
Mirror
Bowditch
Piston
Extension
Sapphire
Piston
Window
Engine
Head
Quartz
Ring
Window
(a)
Imaging
Mirror
Bowditch
Piston
Extension
Sapphire
Piston
Window
Engine
Head
Quartz
Ring
Window
(b)
Figure 3.9: Cross-sectional view of the (a) large and (b) small optically accessible
engines.

41
3.4. Dynamometer
The large engine was motored using a General Electric type TLC-20
dynamometer. The maximum rated speed of the dynamometer is 5000 RPM with a
maximum delivery as a motor of 40 HP and was controlled with a Reliance Electric
MaxPak PLUS VS Drive, model 600840-2A. The small engine was motored using an
A.O. Smith Century AC motor. The maximum rated speed of the motor is 3470 RPM
with rated power of 3 HP.
3.5. Intake and Exhaust Systems
The intake system for each engine consisted of three cylindrical tanks. A
schematic of the system is shown in Fig. 3.10. Surge Tank 1 feeds both Surge Tank 2
and 3. Surge Tank 2 feeds into the smaller partition of the intake port while Surge Tank
3 feeds into the larger partition. For PIV measurements, oil droplets are introduced just
upstream of Surge Tank 1 so that they mix evenly before entering Surge Tanks 2 and 3.
For PLIF measurements, a fuel tracer is introduced just before entering Surge Tank 2 so
that it mixes evenly before entering the smaller partition of the intake port and the larger
partition is fed by air only. The configuration of the system is such that the pressure drop
across both partitions of the intake port is approximately the same. The exhaust surge
tank was cylindrical in shape and the same size as the intake tanks. Flexible wire-
reinforced PVC tubing was used to connect the tanks and intake and exhaust ports. All
basic dimensions of the surge tanks and tubing scaled at the 1.69 ratio.
The intake system was heated such that the air entering the engines was at 50°C.
The intake surge tanks for the large engine each had a 5 Watt/in2, 3” x 24” flexible

42
silicone-rubber heater attached to the surface. This was the same rated power that had
been used with the single intake tank for previous studies. An inline heater upstream of
Surge Tank 1 was also turned on. At the lower speeds, it took an excessive amount of
time to get to the steady state temperature. Thus, a flow directing baffle was inserted at
the top of Surge Tanks 2 and 3 to direct the flow along the tank wall, helping to reduce
stratification and enhancing the heat transfer to the air. It is recommended that the tank
heaters be replaced with higher power heater strips for future work. The intake surge
tanks for the small engine each had a 10 Watt/in2, 6 x 12 in
2 flexible silicone-rubber
heater attached to the surface. Experiments were performed with a pressure just upstream
of Surge Tank 1 at ~98 kPa.

43
Pressure98kPa
Flowmeter
BuildingAir In
77”ø1.25”
ø1.25”
9.6”
ø5.6”
ø1.25”
ø0.75”
DividedIntake Port
ExhaustPort
ø1.25”
Engine
34”
7”
12”54”
BuildingExhaust
Tank 1Tank 2 Tank 3ExhaustTank
Oil Droplets(PIV)
34”
Figure 3.10: Intake surge tank schematic for small and large engines. Dimensions refer
to small engine, large engine is scaled approximately by 1.69 scaling factor.
3.6. Intake Air Flow Metering
The air flow rate into the large engine was measured using three choked-flow
orifices upstream of the intake surge tank system. The orifices had been calibrated
previously by another student and information can be found in [51]. The air flow rate
into the small engine was initially measured using a Meriam Instrument model 50MH10-
2 laminar flow element (LFE) meter. The LFE was calibrated using a Singer, American
Meter Division, AL-175 bellows meter. An Omega Engineering model PX278-01D5V

44
pressure transducer was used to measure the pressure drop across the LFE. However,
when the engine was running, pressure waves in the intake system made it hard to get
reliable and repeatable data since flow through the LFE oscillated at a high frequency.
The air flow rate was subsequently acquired by placing the bellows meter directly at the
exit of the exhaust tank to measure the flow rate out of the engine.
3.7. Cylinder Pressure
Pressure data were acquired using a Kistler model 7061B piezoelectric pressure
transducer. The pressure transducer was mounted into the cylinder head such that its
surface was flush with the flat engine head deck. The charge produced by the transducer
was converted to a voltage by a Kistler type 510 dual mode amplifier. The linear
response of the change in voltage with a change in pressure was determined by
calibration with a Chandler Engineering/Ametek dead weight pressure tester. A Hi-
Techniques Win600 data acquisition system was used to record pressure traces versus
engine crank angle. The engine crank angle was sent to the data acquisition system by a
BEI, model H25D-SS-360-ABZC, shaft encoder with 1 degree precision. Pressure traces
were acquired for 50 consecutive engine cycles and averaged to find a mean pressure
trace.
3.8. Oil and Vacuum System
The oil and vacuum system for the large engine was the same as described in [51].
The only difference for the oil system plumbing was that the lines leading up to the
engine head were capped, as oil was not needed for the engine head. The oil and vacuum

45
system for the small engine is shown in Fig. 3.11. The oil flow rate was adjusted such
that the oil pressure exiting the pump was near 138 kPa. This ensured the right amount of
oil flowed to the crankcase. Inside the crankcase two jets were positioned to spray
towards the bottom of the piston and cylinder wall while a third was routed to the
crankshaft journal bearing. A vacuum pump was employed to pull a vacuum on the
crankcase to limit oil migration, and two needle valves were used to hold the oil reservoir
about 28 kPa below the crankcase pressure (when the oil system was on). This ensured a
return flow of oil from the crankcase to the oil reservoir. Any oil that made it past the
needle valves was collected in the oil separator to reduce the amount of oil entering the
vacuum pump and the building exhaust line.
OilPump
Piston
OilReservoir
OilSeparator
VacuumPump
Figure 3.11: Small engine oil and vacuum system.
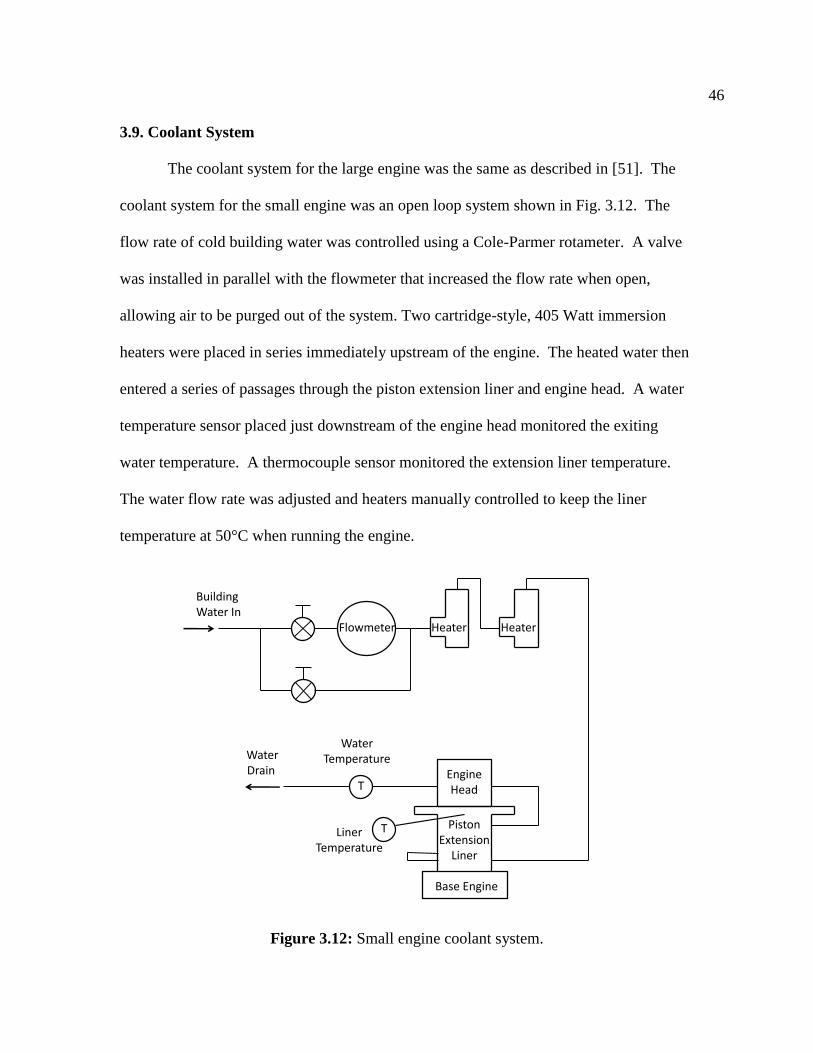
46
3.9. Coolant System
The coolant system for the large engine was the same as described in [51]. The
coolant system for the small engine was an open loop system shown in Fig. 3.12. The
flow rate of cold building water was controlled using a Cole-Parmer rotameter. A valve
was installed in parallel with the flowmeter that increased the flow rate when open,
allowing air to be purged out of the system. Two cartridge-style, 405 Watt immersion
heaters were placed in series immediately upstream of the engine. The heated water then
entered a series of passages through the piston extension liner and engine head. A water
temperature sensor placed just downstream of the engine head monitored the exiting
water temperature. A thermocouple sensor monitored the extension liner temperature.
The water flow rate was adjusted and heaters manually controlled to keep the liner
temperature at 50°C when running the engine.
Building Water In
Flowmeter Heater
Base Engine
PistonExtension
Liner
Heater
EngineHeadT
TLinerTemperature
WaterTemperatureWater
Drain
Figure 3.12: Small engine coolant system.

47
3.10. Optical System
The second harmonic (532 nm) of an Ekspla model NL303D dual Nd:YAG laser
was used to generate the laser excitation for the PIV experiments. The two beams were
made collinear and directed towards the optical engine. For the large engine, the pulse
energy of each laser beam was held at 230 mJ, and a laser sheet was generated using a 50
mm focal length cylindrical lens and a 500 mm focal length spherical lens separated by
20 mm. The laser sheet was located 4.6 mm below the cylinder head deck. For the small
engine, the pulse energy of each laser beam was held at 100 mJ, and a laser sheet was
generated using a 100 mm focal length cylindrical lens and a 500 mm focal length
spherical lens separated by 240 mm. The laser sheet was located 2.7 mm below the
cylinder head deck. The location of the laser sheet was such that at TDC the laser sheet
was nearly equidistant between the engine head surface and piston surface.
3.11. Camera System
A Princeton Instruments MicroMAX interline transfer CCD camera was used to
acquire particle images for the PIV experiments. The camera has a 1300x1030 pixel
CCD array with 6.7 m square pixels. The read-out rate of the camera was such that at
600 rpm an image pair was acquired every other engine cycle. Thus, no two image pairs
were ever acquired during the same cycle. For both engines, a low-magnification field-
of-view (FOV) was imaged using a 105 mm f/2.8 AF Micro Nikkor lens. For the large
engine, the low-magnification FOV had an image magnification of 0.15 and a FOV of
57.4 mm by 45.3 mm was achieved. For the small engine, the low-magnification FOV
had an image magnification of 0.25 and a FOV of 33.9 mm by 26.8 mm was achieved. A
48
high-magnification FOV was imaged using a 200 mm f/4 Micro Nikkor lens. For the
small engine, in order to increase the magnification of the high-magnification FOV by the
1.69 scaling ratio, a Nikon model PN-11 52.5 mm extension tube was used in conjunction
with the 200 mm lens. For the large engine, the high-magnification FOV had an image
magnification of 0.49 and a FOV of 17.5 mm by 14.0 mm was achieved. For the small
engine, the high-magnification FOV had an image magnification of 0.83 and a FOV of
10.4 mm by 8.3 mm was achieved.
The resolution of the high-magnification FOV between the large and small
engines was compared using a 1951 U.S. Air Force resolution target, shown in Fig. 3.13.
The intensity of pixels on a line bisecting a group of line pairs was plotted to find the
maximum and minimum intensity. An intensity ratio, IR, defined as
minmax
minmax
II
IIIR (3.1)
was calculated for each group of line pairs. Figure 3.14 shows the intensity ratio versus
the specified line pairs per mm for each line group. The point at which the intensity ratio
crosses the 4% boundary for the 200 mm lens with the extension tube is seen to occur at
slightly higher numbers than without the extension tube, indicating the resolution of the
camera configuration for the small engine is at least as good as for the large engine.

49
Figure 3.13: Resolution image of high-magnification FOV using 200 mm lens for large
engine.
1.0
0.8
0.6
0.4
0.2
0.0
(Im
ax-I
min)/
(Im
ax+
I min)
6050403020100
Line Pairs Per mm
Large Engine Small Engine 4% Boundary
Figure 3.14: Intensity ratio versus line pairs per mm of resolution target for high-
magnification FOVs of large and small engines.

50
3.12. Particle Image Velocimetry (PIV) System
For the PIV experiments, a TSI model 9306A six jet atomizer was used to seed
the intake flow with olive oil droplets estimated to have a mean diameter of 0.5 to 2 μm.
According to [52], oil droplets at this diameter have been shown to faithfully follow the
turbulent flow fields at frequencies between 1 and 10 kHz. The particles were introduced
just upstream of the intake surge tanks to ensure sufficient mixing, see Fig. 3.10. The
seeding density was adjusted to allow at least ten particle pairs for the smallest PIV
interrogation window [53] of 32x32 pixels. The temporal separation of laser pulses
ranged from 10 to 160 μs for the large engine and from 7 to 80 μs for the small engine
and was set such that the maximum in-plane particle displacement would not exceed a
quarter of the interrogation window [53]. The first laser pulse of each pulse pair occurred
at the crank angle of interest. Since the rules of [53] were followed in order to ensure
accurate data, the second laser pulse of each pulse pair did not always occur at the same
crank angle for all conditions investigated.
The PIV images were analyzed using the TSI Insight3G software. The software
calculated velocity vectors by utilizing a multiple-pass algorithm with 50% overlap and
an FFT correlation engine. Velocity vectors were validated by comparing the ratio of the
two highest correlation peaks to a set threshold value. Vectors passing the test are termed
first-choice vectors, while vectors failing the test were replaced by a median vector of its
nearest neighbors. The initial interrogation grid was 64 64 pixels and the final
interrogation grid was 32 32 pixels, which resulted in velocity vectors spaced on a 16
pixel grid. For the large engine, velocity vectors were thus spaced 708 μm for the low-
magnification FOV and 217 μm for the high-magnification FOV, corresponding to
51
interrogation zones 1.42 and 0.43 mm, respectively. For the small engine, velocity
vectors were thus spaced 419 μm for the low-magnification FOV and 128 μm for the
high-magnification FOV, corresponding to interrogation zones 0.84 and 0.25 mm,
respectively.

52
CHAPTER 4
STEADY FLOW CHARACTERIZATION OF INTAKE PORTS
This chapter describes the steady flow testing conducted on the engine heads.
4.1. Experimental Equipment
The steady flow testing of the intake ports was conducted on a SuperFlow 600
flow bench. The flow bench pulls air into the machine with an associated pressure drop
across an attached test section ranging from 0.25 to 11.96 kPa. The volumetric flow rate
was found from the pressure drop across a calibrated orifice inside the flow bench using
an inclined manometer. The density of the air was calculated from temperature and
humidity data acquired using a Mannix model J411-TH Digital Hygro Thermometer, and
the barometric pressure was measured using a Heise model CM dial pressure gauge. The
engine heads were tested at the industry-standard pressure drop of 6.97 kPa.
The steady flow and swirl testing were performed using a different swirl adapter
fixture for each size engine head, and tumble testing was performed using a different
tumble adapter fixture for each size engine head. For swirl and tumble coefficient
testing, the swirl and tumble adapter fixtures were bolted to the flow bench with the swirl
meter beneath the fixtures, see Figs. 4.1-4.3. The valve lift was adjusted and measured
using a modified micrometer that mounted to the engine head. Intake horns were
connected to the entrance of the intake ports. The intake horns have radii of curvature
large enough to minimize the pressure drop at the inlet to the intake ports. The
dimensions of the swirl adapter fixtures for both large and small engine heads are shown
in Table 4.1. The bore dimension of the fixtures were the same as the engine cylinder

53
bore, and the height of the fixtures was 1.5 times the bore. The dimensions of the tumble
adapter fixtures are shown in Table 4.2. For all testing, data were collected and averaged
over a 40 second period.
(a) (b)
(c)
Figure 4.1: (a) Flow test setup of small head, (b) swirl test setup of large head, and (c)
tumble test setup of small head on the flow bench next to large tumble adapter.

54
B
H
DP
HP
L
Intake Port
Intake Horn
Swirl Adapter
Fixture
Paddle Wheel
Honeycomb
D
ω
(a)
B
H
DI
HI
L
Intake Port
Intake Horn
Swirl Adapter
Fixture
Impulse Torque
Meter
Honeycomb
D
T
(b)
Figure 4.2: (a) Vane-type swirl meter test setup, (b) Impulse-type torque meter test setup.

55
Swirl Meter Swirl Meter
Engine Head
Cylinder Axis
d1
d3
d2
d3
Figure 4.3: Front and side views of tumble testing arrangement.
(Dimensions in mm) Large Fixture Small Fixture
B 82.0 48.6
H 123.0 72.8
Table 4.1: Dimensions of swirl adapter fixtures.
(Dimensions in mm) Large Fixture Small Fixture
d1 261.0 154.5
d2 139.8 83.6
d3 87.0 50.8
Table 4.2: Dimensions of tumble adapter fixtures.
Swirl testing was conducted using two different types of swirl meters (to be
explained below). The vane-type swirl meter used for this study was an Audie
Technology paddle-style swirl meter. The meter featured a honeycomb paddle wheel
132.1 mm in diameter and made of polycarbonate plastic with tubular cells. The outer
diameter of the paddle featured a smooth, thin polycarbonate sheet wrapped around the
56
honeycomb to form a continuous cylinder-like shape. The swirl meter provided an
electronic output of two pulses per revolution, which are also used to determine both the
direction of rotation and the rotation rate with the addition of an HP model 5315A
Universal Counter.
An impulse-type swirl meter (see Fig. 4.2(b)) was designed for this study. In this
meter, a Transducer Techniques RTS-5 torque sensor was secured at the bottom and a
shaft was attached at one end to the sensor and on the other end to a honeycomb flow
straightener. This torque sensor was chosen for its rated torque measurement range of up
to 0.035 N-m. The honeycomb was made of the same material and tubular structure as
used in the vane-type meter. The design of the impulse-type meter allowed different
honeycomb flow straighteners to be easily tested. Dimensions of the honeycomb flow
straightener will be discussed in a later section. A Daytronic model 3270 strain gage
conditioner/indicator provided the excitation voltage for the torque sensor and a
LabVIEW data acquisition system recorded the instantaneous voltage at a rate of 10Hz.
The impulse-type meter was calibrated by applying a set of known torques to the
center of the honeycomb flow straightener. For each applied torque, a corresponding
voltage was recorded. Before and after each applied torque, the zero-torque voltage was
recorded and averaged. The average zero-torque voltage was subtracted from the
applied-torque voltage to obtain the voltage difference. The voltage difference was
plotted against the applied torques to determine a linear calibration curve. Calibration
data were collected for counterclockwise torques applied to the honeycomb flow
straightener.

57
4.2. Flow Coefficient
Flow coefficients were calculated for both small and large heads to examine and
compare the steady flow through the intake ports. Flow coefficients are a comparison of
the actual to a theoretical mass flow into the engine. Data were collected over the full
range of valve lift, L. The flow coefficient, Cf, is defined as:
vB
fAV
mC
(4.1)
where m is the measured mass flow rate, is the density, VB is the Bernoulli velocity
defined as:
PVB
2 (4.2)
where P is the pressure drop across the test section, and Av is the valve inner seat area
defined as:
4
2DAv (4.3)
where D is the valve inner seat diameter. Appendix C contains graphs of flow coefficient
data plotted versus crank angle degrees for both 0- and 90-degree port orientations and
shrouded and non-shrouded valves. A mass-weighted average flow coefficient, Cf,avg, as
defined in Eqn. (2.6), was calculated for all the data so that a comparison could be made
between the small and large heads using a single metric. This number is included in the
graphs and in Table 4.3. For the 0- and 90-degree port orientations with the non-
shrouded valves, Cf,avg of the small head compared to the large head differs by 4.3% and -
3.6% for the performance ports and by 3.6% and 0.9% for the utility ports, respectively.

58
For the ports with the shrouded valves, Cf,avg differs by -4.1% and -1.3% for the utility
port and performance port, respectively. As discussed in Appendix C, an uncertainty
analysis of the flow coefficients was conducted at several non-dimensional valve lifts. In
an attempt to calculate a single uncertainty for Cf,avg, the uncertainty propagation method
from [54] was used to calculate uCf,avg, also detailed in Appendix C; the results are
presented in Table 4.3. As is inherent with the propagation method, the uncertainties
become smaller. The engine head exhaust flow was tested on the flowbench by blowing
air past the valves and out the ports. Using the same calculations as for the intake ports
to determine the flow coefficients, a graph of the flow coefficients for the exhaust ports is
included in Appendix C and mass-weighted average flow coefficients are included in
Table 4.4. For the exhaust ports, the average flow coefficient of the small head compared
to the large head differs by 6.0%. The difference in flow coefficients for the intake and
exhaust between the large and small heads appears small enough that the heads can be
considered similar.
Large Head Small Head
Valve Port Orientation Cf,avg uCf,avg Cf,avg uCf,avg
Shrouded Utility 0-degree 0.293 0.001 0.281 0.001
Performance 0-degree 0.303 0.001 0.299 0.001
Non-shrouded Utility 0-degree 0.446 0.001 0.462 0.001
90-degree 0.430 0.001 0.434 0.001
Performance 0-degree 0.481 0.003 0.502 0.001
90-degree 0.499 0.003 0.481 0.001
Table 4.3: Intake port mass-weighted average flow coefficients and uncertainties of the
small and large heads in the 0- and 90-degree port orientations.

59
Exhaust Ports, Cf,avg
Small Head 0.461
Large Head 0.435
Table 4.4: Exhaust port mass-weighted average flow coefficients.
4.3. Swirl Coefficient and Swirl Ratio Definitions
Swirl coefficients were calculated for both the small and large heads. As with the
flow coefficients, the swirl coefficients should be similar among geometrically similar
engines. The swirl coefficient, Cs, is a characteristic non-dimensional rotation rate and is
calculated for vane-type meters as
B
sV
BC (4.4)
where ω is the vane or paddle wheel angular velocity and B is the cylinder bore. For
impulse-type swirl meters, the swirl coefficient is calculated as
BVm
TC
B
s
8 (4.5)
where T is the torque measured by the meter. The swirl ratio, Rs, is a convenient single
metric that takes into account the flow and swirl coefficients over the entire lift profile of
the engine. The swirl ratio is the ratio of the angular velocity of the flow to the
crankshaft angular rotation rate. The swirl ratio is calculated as
2
2)(
4 IVC
IVO
IVC
IVO
dCA
dCCABS
R
fV
sfV
vs (4.6)

60
where ηV is the volumetric efficiency, assumed equal to 1 for all calculations, S is the
engine stroke, and θIVO and θIVC are the crank angle, in radians, at intake valve open and
intake valve close, respectively.
4.4. Impulse-Type Meter Initial Testing
Swirl and tumble data were originally to be taken using an impulse-type swirl
meter used in a previous investigation [44]. The heads were tested with the non-shrouded
valves using the performance ports in the 0-degree orientation as this configuration of
port and orientation was thought to produce the most air swirl and, thus, the largest
voltage signal as measured by the torque sensor. At each valve lift, approximately 400
voltage samples from the torque sensor were acquired over a time period of 40 seconds.
A signal-to-noise ratio was defined as:
VuVNS // (4.7)
where V is the torque sensor mean voltage change and uV is the 95% uncertainty of the
mean voltage change defined as:
N
Su V
V 96.1 (4.8)
where SV is the voltage change sample standard deviation and N is the number of voltage
samples. Equation (4.8) is based on a t-probability distribution where the t-statistic is
based on an infinite number of samples. Figure 4.4 shows the signal-to-noise ratio of the
large and small heads. As can be seen, the signal-to-noise ratio of both heads quickly
tends towards zero as the lift is decreased from the maximum lift. It is not surprising that
the small head S/N falls off quicker than the large head because geometrically similar

61
engines with the same pressure drop produce an angular momentum flux proportional to
the engine bore cubed [55]. Thus, the small engine head will produce approximately
21% of the torque compared to the large head.
120
100
80
60
40
20
0
S/N
0.250.200.150.100.050.00
L/D
Performance Port, 0-degree Orientation, Non-shrouded Valves
Small Head
Large Head
Figure 4.4: Signal-to-noise ratio of large and small heads using impulse swirl meter
from [44].
After this test, it was decided to fabricate shrouded valves in order to also study
conditions with higher levels of swirl. Based on the 1.69 scale ratio, and assuming for a
given head we want to increase the swirl coefficient by a factor of ten using the shrouded
valves, then for a given non-dimensional valve lift the ratio of torque is approximately
48:1 between the large and small heads. Thus, a measurement device with a very high
dynamic range is required to cover the entire test range of interest. These results
62
motivated the investigation of a vane-type meter because, intrinsically, a rotation rate is
easier to measure with a wide dynamic range, and can be accurately calibrated.
4.5. Vane-Type Meter Testing
A series of swirl tests were conducted using the vane-type meter. The results
showed that the swirl magnitude of the small engine was generally small compared to the
large engine for all intake port configurations. It was decided to measure the swirl of the
performance ports with the shrouded valves (at this point in testing the shrouds were
temporary mockups) using the impulse-type meter from [44] and compare to the results
using the vane-type meter to determine if the meters gave similar results. This condition
was chosen because of the high S/N achieved with the impulse-type meter. Figure 4.5
shows the swirl coefficients for both heads as a function of L/D. The impulse meter
results show a good degree of similarity – the resulting swirl ratios were 2.65 and 2.75 for
the large and small heads, respectively. In contrast, the vane-type meter results showed
two disturbing features. First, the measurements for both heads differed from the impulse
meter results. Second, the results for the two heads differed quite significantly from each
other; the swirl ratio was 0.57 for the small head and 1.13 for the large head. The former
problem is an issue of absolute accuracy, which will be discussed in the next section, but
the latter is an issue of the operation of the vane-type meter and is discussed here.

63
-0.8
-0.6
-0.4
-0.2
0.0
Cs
0.250.200.150.100.050.00
L/D
Impulse Meter
Vane Meter
Open Symbol: Small HeadFilled Symbol: Large Head
Figure 4.5: Performance ports using mockup shrouded valves. Vane-type meter tested
with standard 5.2 inch diameter paddle. + CW Swirl, - CCW Swirl.
Due to the difference in the diameters of the two swirl adapter fixtures, it was
thought that there might be a difference in air frictional losses from the paddle outside of
the cylinder bore (the same size paddle was used for both heads). The portion of the
paddle outside of the cylinder would experience air friction tending to retard the motion
of the paddle, which is consistent with the lower Cs measured for the small head. In order
to test the effect of air frictional losses on the rotational speed of the paddle, custom
paddles were fabricated of the same honeycomb material and geometry as the original
paddle wheel but with a smaller paddle diameter, DP. For both the small and large heads,
the ratio of the paddle diameter to the swirl adapter fixture, DP/B, was set to 1.2. Figure
4.6 shows the results of the constant DP/B tests for the same conditions as Fig. 4.5. It can
be seen that by controlling DP/B the differences between the two vane-type meter

64
measurements has been eliminated, and one could conclude that self similarity has been
achieved. There are, however, still differences in the absolute value of swirl coefficient
between the impulse- and vane-type meter measurements.
-0.8
-0.6
-0.4
-0.2
0.0
Cs
0.250.200.150.100.050.00
L/D
Impulse Meter
Vane Meter
Open Symbol: Small HeadFilled Symbol: Large Head
Figure 4.6: Performance ports using mockup shrouded valves. Vane-type meter tested
with Dp/B=1.2 custom paddles. + CW Swirl, - CCW Swirl. The impulse-type meter
measurements are the same as Fig. 4.5.
4.6. Swirl References
Seeing the differences in the absolute value of swirl coefficients between the
impulse- and vane-type meter measurements, it was desired to verify the accuracy of the
meters to gain confidence in the swirl measurements. This was accomplished by
developing two reference fixtures, a zero-swirl reference shown in Figs. 4.7(a-b) and a

65
known-swirl reference shown in Figs. 4.7(c-d), with the relevant dimensions given in
Table 4.5.
LR DR
SR
Flow Straightener
B
θR
Swirl Adapter
Fixture
(a) (b)
LR
DR
SR
Flow Straightener
B
AA
Section A-A (Enlarged)
R1
R2
Swirl Adapter
Fixture
θR
(c) (d)
Figure 4.7: (a-b) Zero-swirl and (c-d) known-swirl reference fixtures.
(Dimensions in mm) Vertical Reference Angled Reference
θR 90° 45°
SR 127.0
DR 19.1
LR 444.5
R2, Small Swirl Adapter
Fixture 13.2
R2, Large Swirl Adapter
Fixture 19.1
Table 4.5: Dimensions of the zero- and known-swirl references.

66
4.6.1. Zero-Swirl Reference
The purpose of the zero-swirl reference is to check for a zero swirl offset. The
zero-swirl reference features a tube that is coaxial with the swirl adapter fixture and a flat
plate that secures to the top of the swirl adapter fixture. A flow straightener was installed
at the inlet of the tube in order to ensure a uniform incoming flow. Tests were performed
at flow rates corresponding to a pressure drop of 6.97 kPa across the test section. The
flow entering the swirl adaptor fixture has a dominant axial velocity profile due to the
geometry of the tube. Since the incoming generated flow has zero swirl, the vane-type
meter should not rotate to a significant degree in either direction and the impulse-type
meter should not indicate any significant torque. Any measurement showing significant
levels of swirl would be an indication that the testing setup is flawed and needs to be
corrected.
4.6.2. Known-Swirl Reference
The purpose of the known-swirl reference is to produce a known amount of swirl
for a given pressure drop. This fixture features a tube with its axis offset from the swirl
adapter fixture axis and a flat plate that secures to the top of the swirl adapter fixture.
The tube is installed in the flat plate at an angle R relative to the horizontal. Again, a
flow straightener was installed at the inlet of the tube. Tests were performed at flow rates
corresponding to a pressure drops ranging from 0.25 to 11.21 kPa across the test section.
For a given geometry (R2 and R), it can be shown [56] that the angled-tube
geometry provides a constant value of Cs. Thus, using Eq. (4.5) one can find the angular
momentum flux (T) entering the swirl adapter fixture. This can be compared to the

67
measured torque, T, from the impulse-type swirl meter or to an equivalent torque, Teq,
from the vane-type swirl meter. Teq is found by equating Eqs. (4.4) and (4.5) and finding
the torque as a function of the measured , and is defined as
8
2BmTeq
(4.9)
For these calculations, the measured velocity, V, which is determined from the volume
flow rate and pipe area, is used in place of the Bernoulli velocity. By making these
comparisons, one can get a quantitative measure of the accuracy of the swirl meters.
4.6.3. Honeycomb Geometry and Swirl Reference Results
It was desired to evaluate the effect of honeycomb cell size diameter (dP, dI) and
height (HP, HI) on measurement accuracy in both impulse- and vane-type swirl meters,
the subscripts P and I refer to the paddle and impulse meters, respectively. Again, the
aim was to gain confidence in the accuracy of the measurements. The impulse-type
meter described in §4.1 was used for the remainder of this study due to its higher
accuracy at small torques.
Both vane- and impulse-type swirl meters were first checked with the zero-swirl
reference. In general, the paddle in the vane-type meter tended to oscillate slightly from
side to side, but no significant rotation was observed. The impulse-type meter torque
sensor voltage oscillated about the zero-flow voltage and indicated a torque offset of
about 1% of the maximum torque produced using the known-swirl reference.
Figure 4.8 shows the results of the known-swirl reference of the vane- and
impulse-type swirl meters for both the large and small fixtures with a honeycomb cell

68
aspect ratio (HI /dI or HP /dP) of 1.4. For the vane meter measurements DP/B =1.2 was
used. Both measurement techniques show excellent linearity with respect to the angular
momentum flux, but there is not a direct 1:1 correspondence between the measured (or
derived in the case of the vane meter) torque and the expected value, i.e. the inlet angular
momentum flux. The high degree of linearity indicates that a single conversion
efficiency can be used to describe the performance of the swirl meters with the known-
swirl reference, and this efficiency is the slope of the lines in Fig. 4.8. For the data in
Fig. 4.8, the efficiency ranges from 0.93 for the small fixture using the impulse-type
meter, to 0.31 for the large fixture using the vane-type meter. From Fig. 4.8 it is clear
that the conversion efficiency is a function of both the meter type and the fixture size.
The impulse-type meter gives results that are larger in magnitude than the vane-type
meters by nearly a factor of two, and the impulse-meter results are closer to but still less
than the correct value.

69
35x10-3
30
25
20
15
10
5
0
T o
r T
eq [
N-m
]
35x10-3
302520151050
Angular Momentum Flux [N-m]
Impulse Meter
Vane Meter
Open Symbol: Small HeadFilled Symbol: Large Head
Figure 4.8: Impulse- and vane-type meter response to a known angular momentum flux
produced from the known-swirl reference tube for the small and large fixtures. For all
cases a cell height-to-diameter ratio of 1.4 was used.
Figure 4.9 shows the effect of the honeycomb flow straightener or vane cell size
and height, using polycarbonate honeycombs having a tubular geometry, on the
conversion efficiency. The honeycomb cell diameters tested were 6.4 and 3.8 mm. For
the vane-type meter DP/B was again set to 1.2 to minimize the frictional losses, and the
honeycomb height was limited to 16.0 mm (HI/dI = 4.3) by the meter design. For the
impulse-type meter longer honeycombs were tested, up to HI /dI =17, and a fixed
straightener diameter of DI =104.1 mm was used. The vane-type meter, Fig. 4.9(a),
showed a weak sensitivity to the cell geometry, but as was seen in Fig. 4.8 the conversion
efficiency is poor. For the large fixture, the conversion efficiency was ~0.32 and for the
small fixture it was near 0.44. The low conversion efficiency for the large fixture could

70
be due to friction at the hub, which would be greater for the larger vane size, or from slip
between the air and the paddle. If air slip was causing the low conversion efficiency, one
might expect that the higher HP /dP cases would perform better, which was not the case.
The impulse-type meter showed a stronger sensitivity to the flow straightener geometry,
with the conversion efficiency decreasing with increasing aspect ratio of the honeycomb.
This result agrees with the findings of Tanabe et al. [57], who found that honeycomb
geometries with smaller drag coefficients in uniform flow (i.e. larger cell size and smaller
honeycomb height) gave higher swirl coefficients. In comparison to the vane-type meter,
the conversion efficiency of the impulse-type meter is significantly larger. Differences
do exist between the two fixture sizes and the magnitude of the conversion efficiency can
be as low as 0.7. Thus, the results from an impulse-style meter will under-predict the true
level of swirl. It is possible that the losses in the bore extension (H/B=1.5) tube could
account for some of the under-prediction seen with the impulse-type meter.

71
0.5
0.4
0.3
0.2
Co
nve
rsio
n E
ffic
iency
543210
HP / dP
Large Fixture
Small Fixture
1.0
0.9
0.8
0.7
0.6
Co
nve
rsio
n E
ffic
iency
151050
HI / dI
Large Fixture
Small Fixture
(a) (b)
Figure 4.9: Swirl conversion efficiency as a function of the cell aspect ratio for (a) the
vane-type meter, and (b) the impulse-type meter.
The reason for conducting these tests was to gain confidence in the accuracy of
the swirl measurements. From these data it is clear that the impulse-type swirl meter
should be used to make the measurements. Examining Fig. 4.9(b) it is also evident that
the honeycomb cell aspect ratio of HI /dI =1.4 will give the most accurate torque
measurements of the angular momentum flux entering the swirl adapter fixture, which is
confirmed by the findings of [57]. Thus, this honeycomb geometry was used for the
remainder of the study. One might look at the difference in the conversion efficiency of
the HI /dI =1.4 honeycomb for the large and small fixtures and conclude that swirl
measurements of the small and large engine heads will be inherently biased. This is not
the case. First, the known-swirl reference tube is a highly idealized flow which is not
necessarily produced by the engine heads. It has been shown [58, 59] that swirl

72
measurement accuracy is also dependent on the flow field produced by the engine head
and varies over the range of valve lift. Second, it was found that the small head with the
shrouded valve produces a maximum angular momentum flux of about 0.007 N-m (for
comparison, the large head with the shrouded valve produces 0.034 N-m). Examining
Fig. 4.8, in this lower range the conversion efficiency of the small fixture is very similar
to that of the large fixture over its entire range. Third, a repeatability study would need to
be performed to get a better measure of the average conversion efficiency. However, this
is not necessary. The data clearly give us confidence that the impulse-type swirl meter
with the HI /dI =1.4 honeycomb give the most accurate measurements that are similar
between the small and large swirl adapter fixtures.
4.7. Swirl Coefficient Testing
Swirl coefficient engine head data were taken with the impulse-type swirl meter
with the HI /dI =1.4 honeycomb geometry. Data were collected over the full range of
valve lift, L. The results are shown in Figs. 4.10(a-c) with the swirl coefficients plotted
versus non-dimensional valve lift for both 0- and 90-degree port orientations and
shrouded and non-shrouded valves. Figures 4.10(a-b) indicate that the ports with the
non-shrouded valves produce low levels of swirl. As expected, the ports in the 0-degree
orientation produce more swirl in the counter-clockwise (CCW) direction compared to
the ports in the 90-degree orientation. Inspecting Fig. 4.10(c), the ports with the
shrouded valves produce significantly more swirl compared to the non-shrouded valves
as evidenced by the greater magnitude swirl coefficients.

73
The swirl ratio, Rs, as defined in Eqn. (4.6), was calculated for all data so that a
comparison could be made between the small and large heads using a single metric. This
number is included in Table 4.6. An uncertainty analysis was performed on the swirl
coefficients at five different valve lifts, and the uncertainty propagation method from [54]
was again used to calculate the swirl ratio uncertainty, uRs, also included in Table 4.6.
The uncertainty results and analysis can be found in Appendix D. For the 0- and 90-
degree port orientations with the non-shrouded valves, Rs of the small head compared to
the large head differs by 77% and -63% for the performance ports and by -5.6% and
151% for the utility ports, respectively. For the ports with the shrouded valves, Rs differs
by 7.7% and 10.8% for the utility port and performance port, respectively.
Comparing the swirl coefficients and swirl ratios of the small and large heads
with the non-shrouded valves, there appears to be good trend-wise agreement in the data
over the valve lift. The magnitudes of the swirl coefficients are also similar. The swirl
ratios are small in magnitude and tend to be influenced more by the swirl coefficients at
the higher valve lifts. Comparing the small and large heads with the shrouded valves,
there is again good trend-wise agreement in the data. The swirl ratios are about 13 times
greater than the ports in the same orientation with the non-shrouded valves. Inspection of
the uncertainty of the swirl coefficients in Appendix D would suggest that there is close
similarity in the swirl produced by the shrouded valves.

74
-0.2
-0.1
0.0
0.1
0.2
Cs
0.250.200.150.100.050.00
L/D
0-degree Orientation
90-degree Orientation
Open Symbol: Small HeadFilled Symbol: Large Head
Performance Port, NV
-0.2
-0.1
0.0
0.1
0.2
Cs
0.250.200.150.100.050.00
L/D
0-degree Orientation
90-degree Orientation
Open Symbol: Small HeadFilled Symbol: Large Head
Utility Port, NV
(a) (b)
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
Cs
0.250.200.150.100.050.00
L/D
Performance Port
Utility Port
Open Symbol: Small HeadFilled Symbol: Large Head
0-degree Orientation, SV
(c)
Figure 4.10: Swirl coefficients versus non-dimensional valve lift of the (a) performance
ports, non-shrouded valves, (b) utility ports, non-shrouded valves, and (c) both ports,
shrouded valves. + CW Swirl, - CCW Swirl.

75
Large Head Small Head
Valve Port Orientation Rs uRs Rs uRs
Shrouded Utility 0-degree -3.214 0.032 -2.967 0.065
Performance 0-degree -3.058 0.030 -2.728 0.058
Non-shrouded Utility 0-degree -0.251 0.008 -0.265 0.008
90-degree 0.128 0.009 -0.065 0.008
Performance 0-degree -0.234 0.008 -0.054 0.007
90-degree 0.121 0.008 0.045 0.007
Table 4.6: Intake port swirl ratios and uncertainties of the small and large heads in the 0-
and 90-degree port orientations.
Figure 4.11 gives the S/N ratio from the swirl coefficient tests calculated in the
same manner as set forth in §4.4. Between the large and small engine heads, the S/N
ratio is quite similar.
140
120
100
80
60
40
20
0
S/N
0.250.200.150.100.050.00
L/D
0-degree Orientation
PP, SV
UP SV
PP, NV
UP, NV
Open Symbol: Small HeadFilled Symbol: Large Head
Figure 4.11: S/N ratio from swirl coefficient tests of ports in 0-degree orientation.

76
4.8. Tumble Coefficients and Testing
Tumble coefficients were measured for both the small and large heads with the
utility port in the 90-degree orientation. Tumble, sometimes referred to as barrel swirl, is
analogous to regular swirl, but with its axis perpendicular to the engine cylinder axis.
The tumble adapter converts the tumbling flow into a swirling flow to be measured by the
swirl meter. As it is not known on which plane intersecting the cylinder axis the tumble
is maximum, tests were performed by rotating the engine head about the cylinder axis.
The same impulse-type swirl meter and honeycomb geometry used for the swirl testing
was used for the tumble tests. Data were taken at four valve lifts corresponding to 100,
75, 50, and 25% of maximum lift and the head was rotated in 30 degree increments. As
the optical engines were not designed to take PIV data in the tumble plane for
comparison to steady flow data, it was decided not to take a more encompassing data set.
Figure 4.12 shows a top-down view of the engine head on the tumble adapter defining the
engine head angles, with the bold arrow affixed to the engine head and indicating the
head direction. Also, the geometry of the small engine head only allowed data to be
collected between 0 and 180 degrees.

77
Intake ValveExhaust Valve
Engine Head
Swirl Meter
90°
180° 0°
(a) (b)
Figure 4.12: (a) Top-down view of engine head indicating head angle direction on
tumble adapter. Bold arrow is affixed to engine head. (b) Small head at 90° head angle.
The tumble coefficient, Ct, is defined in the same manner as the swirl coefficient:
BVm
TC
B
t
8 (4.10)
A tumble ratio, Rt, defined in Eqn. (4.11), was calculated in the same manner as the swirl
ratio to provide a single metric for comparison between the large and small heads,
however it should be noted that it is less accurate than the swirl ratio since it was
approximated using data at only four valve lifts.
2
2)(
4 IVC
IVO
IVC
IVO
dCA
dCCABS
R
fV
tfV
vt (4.11)
Figure 4.13 shows the tumble coefficients versus the engine head angle for the
four values of non-dimensional valve lift tested. At all but the second lowest valve lift,

78
the trends and magnitudes of the tumble coefficients are similar. At the highest valve lift
between 0 and 180 head angle degrees, the maximum tumble coefficients are within 0.1%
between the small and large heads. The maximum tumble ratios, Rt, for the large and
small heads are 0.54 and 0.48, respectively. Again, the data show very close similarity
between the two engine heads.
-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
C
t
3303002702402101801501209060300
Engine Head Angle
L/D = 0.05
L/D = 0.12
L/D = 0.20
L/D = 0.25
Open Symbol: Small HeadFilled Symbol: Large Head
Figure 4.13: (a) Tumble coefficients versus engine head angle for the utility ports in the
90-degree orientation with the non-shrouded valves.

79
CHAPTER 5
OPTICAL ENGINE MEASUREMENTS AND ANALYSIS
This chapter describes the measurements acquired in the optical engines,
including the flow rate, pressure traces, and PIV data and analysis. All MATLAB code
related to the PIV analysis can be found in Appendix E.
5.1. Engine Conditions
The engines were run over a range of speeds and data were collected over a range
of crank angles. The large engine was run at speeds of 300, 600, 900, and 1200 rpm.
The small engine was run at speeds of 600, 1200, and 1800 rpm. These speeds were
chosen to give roughly the same range of mean piston speed. The engine speeds were in
multiples of 300 rpm so that the PIV data could be easily acquired with the available
laser, which fired at a constant frequency of 10 Hz.
5.2. Engine Flow Rate
The mass flow rate into each engine was measured as described in §3.6. The
volumetric efficiency, ηV, at each engine conditions was calculated as
th
measv
m
m
(5.1)
where m easm is the measured mass flow rate and thm is the theoretical mass flow rate
defined as
120
RPMVm
disp
th (5.2)
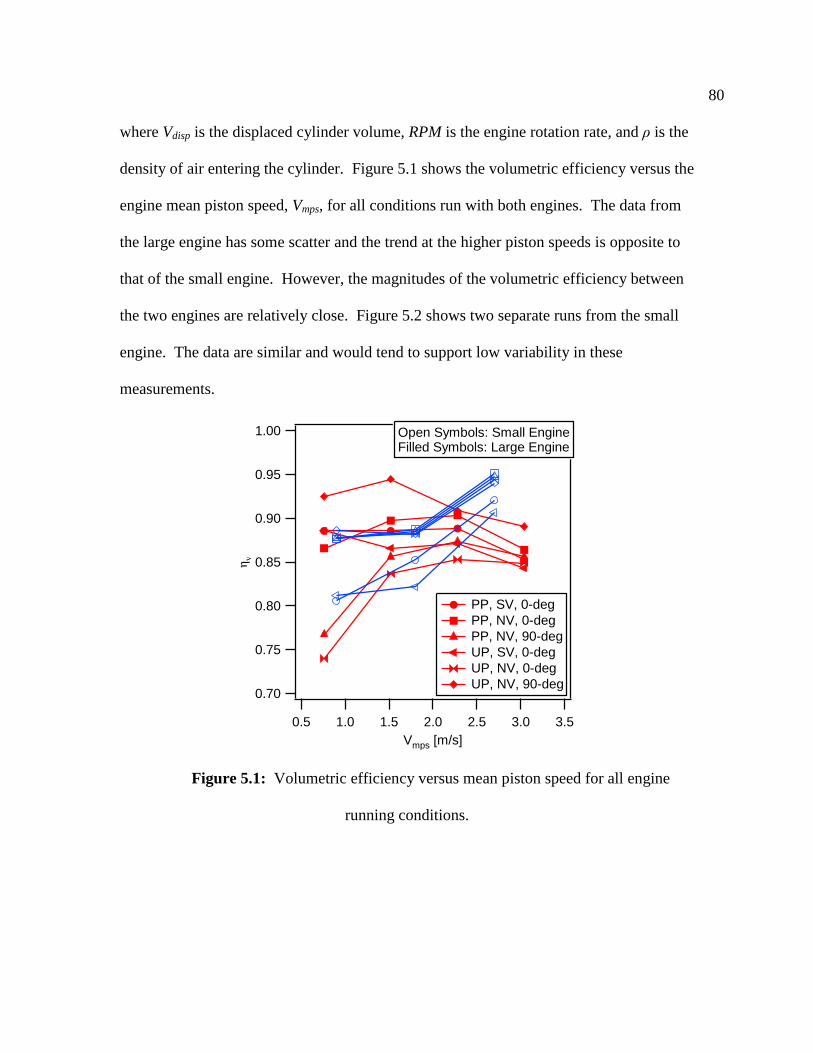
80
where Vdisp is the displaced cylinder volume, RPM is the engine rotation rate, and ρ is the
density of air entering the cylinder. Figure 5.1 shows the volumetric efficiency versus the
engine mean piston speed, Vmps, for all conditions run with both engines. The data from
the large engine has some scatter and the trend at the higher piston speeds is opposite to
that of the small engine. However, the magnitudes of the volumetric efficiency between
the two engines are relatively close. Figure 5.2 shows two separate runs from the small
engine. The data are similar and would tend to support low variability in these
measurements.
1.00
0.95
0.90
0.85
0.80
0.75
0.70
ηv
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Open Symbols: Small EngineFilled Symbols: Large Engine
Figure 5.1: Volumetric efficiency versus mean piston speed for all engine
running conditions.

81
1.00
0.95
0.90
0.85
0.80
0.75
0.70
ηv
3.53.02.52.01.51.00.5
Vmps [m/s]
Small EnginePP, SV, 0-deg
Run 1
Run 2
Figure 5.2: Volumetric efficiency versus mean piston speed for two separate runs in the
small engine.
5.3. Engine Peak Pressure
Pressure traces for all running conditions were acquired for both engines. The
peak pressures of the engines are shown in Fig. 5.3 versus the mean piston speed. Similar
to the trend of pressure traces matching in geometrically similar engines at the same
piston speed that Taylor [11] observed, Fig. 5.3 shows a similar trend in the peak pressure
with mean piston speed. If the large engine peak pressures are linearly interpolated to the
same mean piston speed as the small engine, the small engine peak pressures are lower by
-1 to -9%.
The crank angles at which the peak pressures occurred for both engines are in
Table 5.1. The peak pressure occurred at crank angles before TDC for all conditions and

82
tended to approach TDC at higher engine speeds. Normally, the peak pressure in non-
optical engines is within one degree of TDC, whereas the peak pressure for these engines
ranged from -5 to -1 bTDC. It is possible that there was blow-by past the teflon piston
rings causing the crank angle at which the peak pressure occurred to retard, as there was
an audible whooshing noise apparent at low engine speeds during compression. The
crank position sensor used with the pressure acquisition system had one degree of
resolution which also limits the precision of the measurement. Examining Table 5.1, the
data show that the small engine peak pressures occur at crank angles roughly 1-2 degrees
before that of the large engine. The TDC position of the piston was determined for both
engines using an MHC Industrial Supply dial indicator with 0.025 mm resolution. After
the data collection was complete, the TDC position of the small engine was measured by
another student using a Philtec D170 fiber optic displacement sensor while the engine
was motoring. This sensor indicated the previous TDC position of the small engine was
roughly 1.5 degrees aTDC. If this is indeed the case, and if the large engine TDC
position was nearly correct, this would mean the crank angles at which the peak pressures
occur were nearly the same between the two engines at the same mean piston speed.

83
1800
1600
1400
1200
1000
Cylin
de
r P
ea
k P
ressu
re [
kP
a]
3.53.02.52.01.51.00.5
Vmps [m/s]
Open Symbols: Small EngineFilled Symbols: Large Engine
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Figure 5.3: Cylinder peak pressure versus mean piston speed.
Large
Engine
UP,
SV,
0-deg
UP,
NV,
0-deg
UP,
NV,
90-deg
PP,
SV,
0-deg
PP,
NV,
0-deg
PP,
NV,
90-deg
0.76 m/s -3 -3 -2 -3 -3 -3
1.52 m/s -2 -3 -2 -2 -3 -3
2.28 m/s -2 -3 -2 -2 -3 -3
3.04 m/s -2 -3 -1 -2 -2 -2
Small
Engine
UP,
SV,
0-deg
UP,
NV,
0-deg
UP,
NV,
90-deg
PP,
SV,
0-deg
PP,
NV,
0-deg
PP,
NV,
90-deg
0.90 m/s -5 -4 -4 -5 -5 -4
1.80 m/s -4 -3 -3 -4 -4 -3
2.70 m/s -3 -3 -3 -3 -3 -3
Table 5.1: Crank angle degree of peak pressure relative to TDC of compression stroke
listed at the engine mean piston speed.

84
5.4. Methods of Determining Mean and Fluctuating Velocity Fields
In analyzing the PIV data, two methods were used to determine the mean velocity
fields. The data acquisition system available for this study was only fast enough to take a
single set of PIV images per engine cycle. Therefore, it was sought to perform the
analysis using the methods appropriate for the spatially resolved, multiple-realization
data available. The analyses can then be compared to investigate the relative agreement
of each method. In the first method, an ensemble-average velocity field was calculated
by averaging the velocity vectors at each location (x,y) as
cN
i
c
iEA iyxUN
yxU1
, 2,1),,(1
),( (5.3)
where Ui is the instantaneous velocity, Nc is the number of cycles, and i=1,2 refers to the
components of the velocity in the x- and y-directions, respectively. In the second method,
a spatial-average velocity field was calculated based on a cutoff lengthscale for each
individual cycle. The analysis computes the average velocity in the x- and y-directions
separately. A two-dimensional fast-Fourier transform (FFT) was performed on the
velocity field. The two-dimensional spectrum was multiplied by a Fermi-Dirac soft
cutoff filter [33], which was calculated as
))1.0/()exp((1
1
ccxy
(5.4)
where κxy is the two-dimensional wavenumber defined as
22
yxxy (5.5)
and κc is the cutoff wavenumber defined as

85
c
cL
2 (5.6)
where Lc is the cutoff lengthscale. The filter gradually sets the Fourier coefficients above
κc to zero. To avoid confusion and make understanding of the data easier, all subsequent
analysis is plotted versus a cutoff frequency, fc, defined as
c
cL
f1
(5.7)
Finally, the two-dimensional inverse fast-Fourier transform (IFFT) is performed on the
Fourier coefficients. The result is a low-pass or spatially averaged velocity field.
A Reynolds decomposition of the velocity fields was performed using both the
ensemble- and spatial-average methods to decompose the velocity field into average, Ū,
and fluctuating, u, components. The fluctuating velocity is defined as
.2,1),(),(),( iyxUyxUyxu iii (5.8)
5.5. PIV FOV Locations and First-Choice Vector Statistics
The locations relative to the cylinder, where the PIV data were acquired for the
low- and high-magnification FOVs, as described in §3.11, are shown in Fig. 5.4. The
filled gray circle represents the portion of the cylinder that was visibly accessible. The
solid-line rectangle shows the location of the low-magnification FOV and the dashed-line
rectangle shows the location of the high-magnification FOV. The dotted-line rectangle
shows the location of a second high-magnification FOV used only to collect data for the
large engine.

86
Cylinder Wall
Cylinder Axis
Exhaust Valve
Intake Valve
Low-Magnification
FOV
High-Magnification
FOVSecond
High-Magnification
FOV
Cylinder
Visible
Area
Figure 5.4: Top view of engine cylinder showing FOVs with respect to engine cylinder
for both engines.
Images were acquired with the low-magnification FOV at crank angles of 90
bTDC, 45 bTDC, and TDC of the compression stroke. This was done such that the bulk
fluid motion could be studied approaching TDC. Images were acquired with the high-
magnification FOV only at TDC of the compression stroke since we were interested in
studying the turbulence properties at this crank angle. For each condition, a set of 50
cycles were captured for the low-magnification FOV and a set of 200 cycles for the high-
magnification FOV. Figure 5.5 shows the percentage difference in the turbulence
intensity (defined in §5.7.1) calculated using N images versus 200 images for the high-
magnification FOV for four engine conditions. The percentage difference for 30 or more

87
images is below 3%, indicating a sufficient number of images were acquired in order to
ensure convergence in the resulting analysis.
-30
-25
-20
-15
-10
-5
0
5
100×
(<u'>
N I
mages-<
u'>
200 Im
ages)/
<u'>
200 Im
ages
200150100500
Number of Images, N
NV, 1200 rpm
SV, 1200 rpm
NV, 600 rpm
SV, 600 rpm
Utility Port, 0-deg OrientationOpen Symbol: Small EngineFilled Symbol: Large Engine
Figure 5.5: Percent difference between turbulence intensity calculated using N images
versus 200 images with four engine conditions, high-magnification FOV, ensemble
average method.
The percentage of first-choice vectors for each condition was calculated and
Table 5.2 gives the relevant statistics for each engine and FOV. The high-magnification
FOV data were very good with a high percentage of first-choice vectors for all engine
conditions. For both engines, the low-magnification FOV compared to the high-
magnification FOV had fewer first-choice vectors, partly due to an increase in laser light
reflecting off valve seat and pressure transducer surfaces that inhibited determination of
„good‟ vectors in those locations.

88
FOV Maximum Minimum Median Mean
Large
Engine
Low-
Magnification 95 78 88 88
High-
Magnification 99 89 95 95
Small
Engine
Low-
Magnification 93 76 85 85
High-
Magnification 96 86 90 91
Table 5.2: PIV statistics for percentage of first-choice vectors for each engine and FOV.
5.6. Low-Magnification PIV Results – Analysis of Swirl Progression and Rotation
Rate
The low-magnification FOV PIV data were acquired to observe the bulk in-
cylinder fluid motion. The ports in the 0-degree orientation resulted in a bulk swirling
motion in the plane of measurement. The ports in the 90-degree orientation did not
exhibit a bulk swirling motion. Thus, only the data acquired with the ports in the 0-
degree orientation were analyzed to determine the location of the swirl center and rate of
angular rotation. In this analysis, only the ensemble average method was used to
determine the mean velocity field for a given condition. The camera magnification was
chosen so that the entire visible cross-section area of the cylinder could be imaged.
Images were acquired at crank angles of 90 bTDC, 45 bTDC, and TDC of the
compression stroke during different cycles.
The method used to calculate the swirl center location and angular velocity is as
follows. The PIV ensemble-average velocity fields were calculated for a given condition
over 50 cycles. An algorithm was developed that assumed a solid body rotation and
calculated the location and angular velocity magnitude, Ω, that minimized the sum

89
squared difference between the solid body and ensemble average velocity fields. The
average sum squared error per velocity vector for a given ensemble average velocity field
ranged from 0.12 to 6.63 m2/s
2 with a median of 0.47 m
2/s
2 for the large engine and from
0.02 to 4.79 m2/s
2 with a median of 0.44 m
2/s
2 for the small engine. Figure 5.6 shows
representative low-magnification PIV velocity fields. Figure 5.6(a) is the ensemble
average velocity field for a given engine condition. Figure 5.6(b) shows the best-fit solid
body velocity field calculated for Fig. 5.6(a), where the calculated swirl center is shown
as a yellow cross in Fig. 5.6(a). Figures 5.6(c) and (d) show two randomly chosen
instantaneous velocity fields. As can be seen, the yellow cross is not exactly on the swirl
center in Fig. 5.6(a). This is attributed to the non-solid body rotation of the ensemble
average velocity field (in fact, the instantaneous velocity fields, Figs. 5.6(c)-(d), have no
well defined swirl center). The algorithm, which tries to fit a solid body rotation, gives a
good estimate of the angular velocity of the ensemble average velocity field. While the
swirl center may not exactly match the ensemble average velocity image, this method is
more descriptive of the flow field as a whole.
x [mm] [m/s]
y [m
m]
-25 -20 -15 -10 -5 0 5 10 15 20 25
-15
-10
-5
0
5
10
15
0
1
2
3
4
5
(a)

90
x [mm] [m/s]
y [m
m]
-25 -20 -15 -10 -5 0 5 10 15 20 25
-15
-10
-5
0
5
10
15
0
1
2
3
4
5
(b)
x [mm] [m/s]
y [m
m]
-25 -20 -15 -10 -5 0 5 10 15 20 25
-15
-10
-5
0
5
10
15
0
1
2
3
4
5
(c)

91
x [mm] [m/s]
y [m
m]
-25 -20 -15 -10 -5 0 5 10 15 20 25
-15
-10
-5
0
5
10
15
0
1
2
3
4
5
(d)
Figure 5.6: Top view of engine cylinder showing low-magnification FOV velocity fields
at TDC for the utility port with the shrouded valve at 600 rpm. (a) Ensemble average, (b)
calculated solid body, and (c)-(d) two randomly chosen instantaneous velocity fields.
Figure 5.7 shows the swirl center locations for both ports with each valve. The
location of the swirl centers at a given crank angle did not vary much over the range of
engine speeds, therefore, Fig. 5.7 omits individual labels of the engine speed and for
clarity boxes the data at a given crank angle. The swirl center locations of the ports with
the shrouded valve tend to be better grouped together at a given crank angle compared to
the data with the non-shrouded valve. The swirl center precesses in time, where the
location is seen to change with crank angle. At TDC, the swirl centers for all port
configurations are located nearest to the cylinder axis. Between the two engines, the
swirl center locations, scaled by the cylinder radii, are grouped in the same location in the
cylinder at the same crank angle time, indicating that the phasing is consistent across size
scaling.

92
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6y/(
B/2
)
-0.4 0.0 0.4
x/(B/2)
TDC
90 bTDC
45 bTDC
UP, SV, 0-deg Cylinder Axis
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
y/(
B/2
)
-0.4 0.0 0.4
x/(B/2)
TDC
90 bTDC
45 bTDC
UP, NV, 0-deg Cylinder Axis
(a) (b)
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
y/(
B/2
)
-0.4 0.0 0.4
x/(B/2)
TDC
90 bTDC
45 bTDC
PP, SV, 0-deg Cylinder Axis
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6y/(
B/2
)
-0.4 0.0 0.4
x/(B/2)
TDC
90 bTDC 45 bTDC
PP, NV, 0-deg Cylinder Axis
(c) (d)
Figure 5.7: Top view of engine cylinder showing swirl center locations at 90 bTDC, 45
bTDC, and TDC, ports in 0-degree orientation. Large engine data at 300, 600, 900, and
1200 rpm, small engine data at 600, 1200, and 1800 rpm. Axes made non-dimensional
by cylinder radius. Open symbols: small engine, filled symbols: large engine. Utility
port: (a) shrouded valve, (b) non-shrouded valve. Performance port: (c) shrouded valve,
(d) non-shrouded valve.

93
Figure 5.8 shows the flow angular velocity magnitude normalized by the engine
angular rotation rate at each crank angle. Normalizing the data by the engine rotation rate
nearly collapses the multiple speeds onto one curve. The shrouded valve for either port
results in about a three to fourfold increase in angular velocity over the non-shrouded
valve. A decreasing trend can be seen for the angular velocity as the piston approaches
TDC for almost all conditions in both engines, which is attributable to viscous losses at
the wall. The one notable exception to this trend is seen with the small engine in Fig.
5.8(c), where the angular rotation rate markedly increases from 90 to 45 bTDC at all
engine speeds and on average is 2% greater than the large engine at 45 bTDC. There is
nothing in the data that would suggest this is erroneous. However, it should be noted that
the data is limited in that only 28% of the cylinder cross-section area is being imaged. It
is not known if increased visible access to the cylinder would change the results
significantly.
If the normalized angular velocity magnitudes at all engine speeds are averaged at
TDC and compared between the large and small engines, the small engine produces a
smaller rotation rate for all conditions. For the utility port, the normalized angular
velocity of the small engine compared to the large engine is lower by 28% and 16% for
the shrouded and non-shrouded valves, respectively. For the performance port, the
normalized angular velocity of the small engine compared to the large engine is lower by
26% and 33% for the shrouded and non-shrouded valves, respectively. One possible
factor in the lower normalized angular velocity of the small engine is the ratio of the
cylinder area to volume. The ratio of the cylinder area to volume of the small engine
increases by the scaling factor of 1.69 compared to the large engine. Thus, there could be
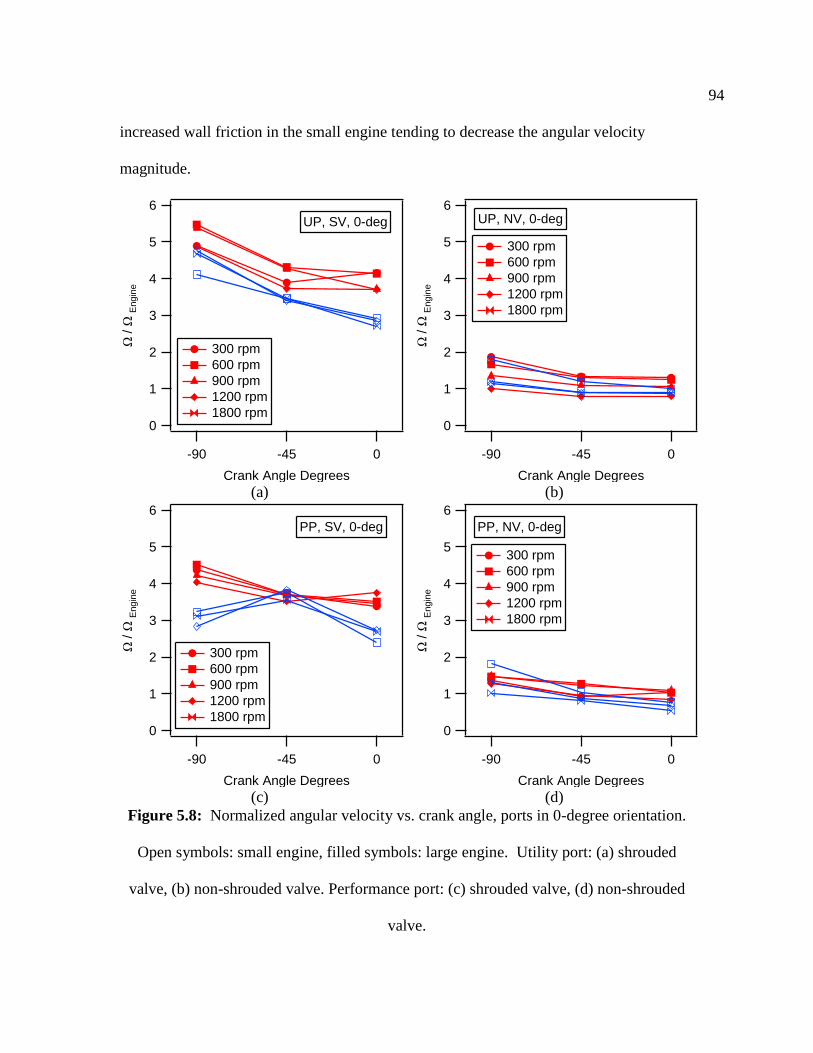
94
increased wall friction in the small engine tending to decrease the angular velocity
magnitude.
6
5
4
3
2
1
0
Ω / Ω
Engin
e
-90 -45 0
Crank Angle Degrees
UP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
6
5
4
3
2
1
0Ω
/ Ω
Engin
e
-90 -45 0
Crank Angle Degrees
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
UP, NV, 0-deg
(a) (b)
6
5
4
3
2
1
0
Ω / Ω
Engin
e
-90 -45 0
Crank Angle Degrees
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
PP, SV, 0-deg
6
5
4
3
2
1
0
Ω / Ω
Engin
e
-90 -45 0
Crank Angle Degrees
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
PP, NV, 0-deg
(c) (d)
Figure 5.8: Normalized angular velocity vs. crank angle, ports in 0-degree orientation.
Open symbols: small engine, filled symbols: large engine. Utility port: (a) shrouded
valve, (b) non-shrouded valve. Performance port: (c) shrouded valve, (d) non-shrouded
valve.

95
Figure 5.9 shows the average normalized angular velocity at TDC versus swirl
ratio found from steady flow testing. For the large engine, the normalized angular
velocity of the ports with the shrouded valve are, on average, 19% higher than the swirl
ratio values while the ports with the non-shrouded valve are about three times higher than
predicted by the steady swirl ratio. For the small engine, the normalized angular velocity
of the ports with the shrouded valve are on average 4% lower than the swirl ratio values
while the ports with the non-shrouded valve are on average seven times higher than
predicted by the steady swirl ratio. Thus, at higher levels of swirl the steady flow tests
are good at predicting the in-cylinder rotation rate as the normalized angular velocity at
TDC is proportional to Rs. However, at very low levels of swirl, Rs largely underpredicts
the normalized angular velocity. This trend in measurement accuracy is consistent across
size scaling.
5
4
3
2
1
0
Avera
ge Ω
(TD
C)
/ Ω
Engin
e
543210
Rs
PP, SV
PP, NV
UP, SV
UP, NV
One-to-One Line
Ports in 0-deg OrientationOpen Symbol: Small EngineFilled Symbol: Large Engine
Figure 5.9: Average normalized angular velocity at TDC vs. swirl ratio, ports in 0-
degree orientation.

96
5.7. High-Magnification PIV Results
The high-magnification FOV PIV data were acquired to study the small-scale
fluid turbulence. The location of the high-magnification FOV relative to the low-
magnification FOV was shown in Fig. 5.4. Unless otherwise specified as the second
high-magnification FOV location, all high-magnification data were acquired in the high-
magnification FOV location. Images were acquired only at TDC of the compression
stroke. For each condition, a set of 200 cycles were captured. Data were analyzed for all
port orientations and engine running conditions.
As described in §5.4, two methods were used to calculate the mean velocity field.
One of the challenges of data analysis in engine flows is to define an appropriate mean
velocity. Therefore, it was sought to perform the analysis using the methods appropriate
for the spatially resolved, multiple-realization data available. Figure 5.10 shows the
results using both methods of finding the mean velocity field for the high-magnification
FOV for a condition with high swirl. Figure 5.10(a) shows the ensemble average velocity
field. Figure 5.10(b) shows the instantaneous velocity field of an individual cycle and
Figs. 5.10(c)-(e) show the spatial average velocity field for the cycle shown in Fig.
5.10(b) using three different cutoff frequencies.

97
x [mm] [m/s]
y [
mm
]
5 10 15
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
(a)
x [mm] [m/s]
y [
mm
]
2 4 6 8 10 12 14 16
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
(b)

98
x [mm] [m/s]
y [
mm
]
2 4 6 8 10 12 14 16
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
(c)
x [mm] [m/s]
y [
mm
]
2 4 6 8 10 12 14 16
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
(d)

99
x [mm] [m/s]
y [
mm
]
2 4 6 8 10 12 14 16
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
(e)
Figure 5.10: Selected images showing the resulting velocity fields using the two
methods of computing the mean velocity field for the given condition: large engine,
utility port, shrouded valve, 0-degree orientation, 1200 rpm. (a) Ensemble average
velocity field, (b) individual cycle instantaneous velocity field, and spatial-average
velocity fields for the individual cycle (b) using cutoff lengthscales of (c) 5 mm, (d) 10
mm, and (e) 15 mm.
5.7.1. Turbulence Intensity
As is done often in engines flows, the fluctuating velocity component is defined
by its root mean square value, deemed the turbulence intensity, u’. The turbulence
intensity was calculated from the fluctuating velocity as
.)},(),({1
),('2
21
2
1 yxuyxuN
yxucN
c
(5.9)
In computing the mean velocity and turbulence intensity for the ensemble-average
method, only first-choice vectors were included in the analysis. However, due to the high

100
number of first-choice vectors, an analysis using all vectors made a negligible difference
in the results. The mean velocity fields for the spatial-average method utilized both first-
choice and interpolated vectors. In processing the spatial average velocity fields, there
are inherent edge effects arising from the use of the Fourier transform method causing an
increase in the calculated turbulence intensity around the edgesof the image. In an effort
to reduce this bias, the analysis using the spatial-average method omitted the five rows or
columns of data nearest the edge of the image. The use of a window function with the
FFT did not give substantial improvement.
Figure 5.11 shows the high-magnification FOV turbulence intensity using both
methods of finding the mean velocity field for the same engine condition as Fig. 5.10.
Figure 5.11(a) shows the turbulence intensity found with the ensemble average method.
The turbulence intensity is seen to be non-uniform and tends to be greatest in magnitude
at the location corresponding to the ensemble average swirl center where the mean
velocity is the smallest (see Fig. 5.10(a)). Figure 5.11(b) shows the turbulence intensity
found using the spatial-average method with a cutoff lengthscale of 10 mm. The
turbulence intensity is seen to be fairly uniform towards the center of the image and
increases in magnitude towards the edges, which is an artifact of the filtering procedure.
Figure 5.11(c) contains the same turbulence intensity field as Fig. 5.11(b), but omits the
five rows and columns of data near the edges, displaying the data used for subsequent
processing. It can be seen that the edge effects introduced by the filter are removed. The
effect of the swirl center precession, which causes the higher apparent turbulence near the
swirl center, is eliminated by the use of the spatial filtering. These images highlight the
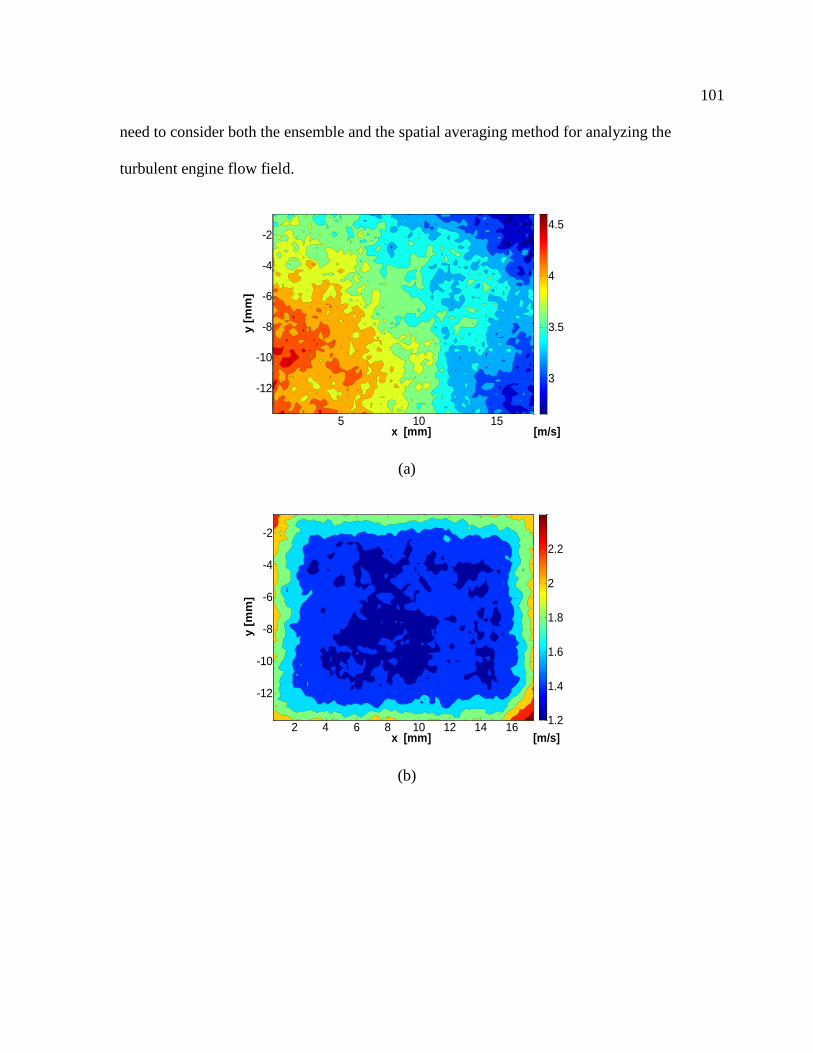
101
need to consider both the ensemble and the spatial averaging method for analyzing the
turbulent engine flow field.
x [mm] [m/s]
y [
mm
]
5 10 15
-12
-10
-8
-6
-4
-2
3
3.5
4
4.5
(a)
x [mm] [m/s]
y [
mm
]
2 4 6 8 10 12 14 16
-12
-10
-8
-6
-4
-2
1.2
1.4
1.6
1.8
2
2.2
(b)
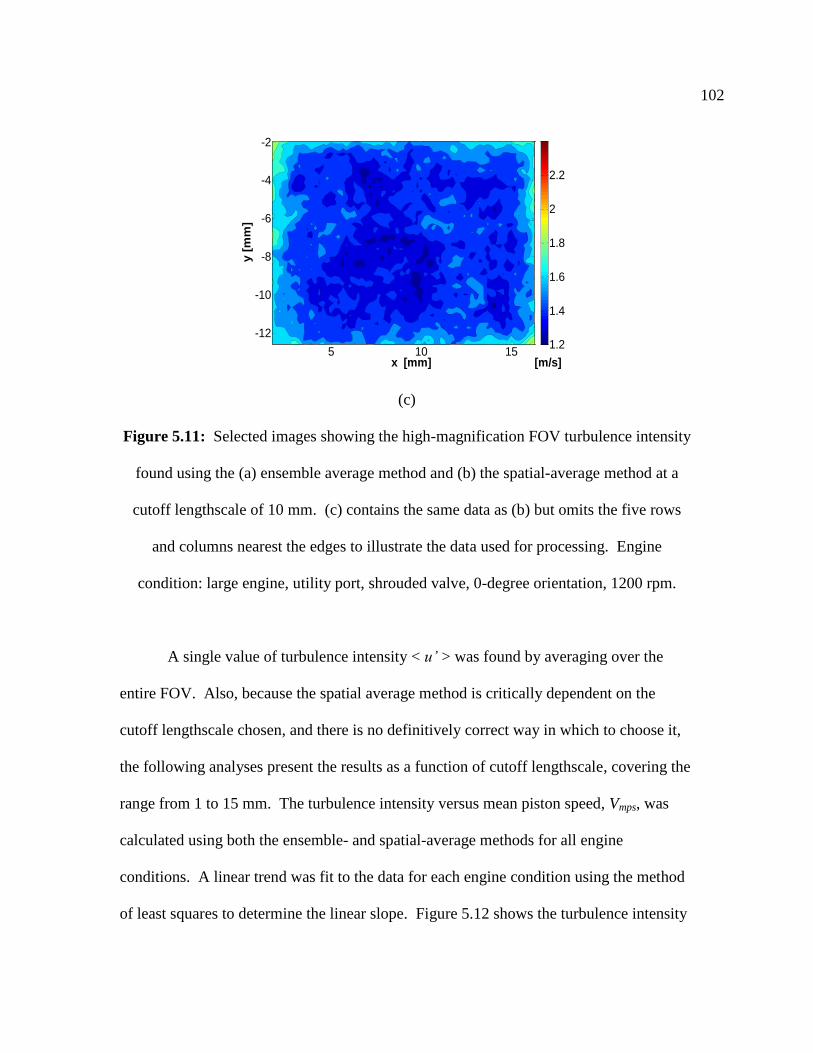
102
x [mm] [m/s]
y [
mm
]
5 10 15
-12
-10
-8
-6
-4
-2
1.2
1.4
1.6
1.8
2
2.2
(c)
Figure 5.11: Selected images showing the high-magnification FOV turbulence intensity
found using the (a) ensemble average method and (b) the spatial-average method at a
cutoff lengthscale of 10 mm. (c) contains the same data as (b) but omits the five rows
and columns nearest the edges to illustrate the data used for processing. Engine
condition: large engine, utility port, shrouded valve, 0-degree orientation, 1200 rpm.
A single value of turbulence intensity < u’ > was found by averaging over the
entire FOV. Also, because the spatial average method is critically dependent on the
cutoff lengthscale chosen, and there is no definitively correct way in which to choose it,
the following analyses present the results as a function of cutoff lengthscale, covering the
range from 1 to 15 mm. The turbulence intensity versus mean piston speed, Vmps, was
calculated using both the ensemble- and spatial-average methods for all engine
conditions. A linear trend was fit to the data for each engine condition using the method
of least squares to determine the linear slope. Figure 5.12 shows the turbulence intensity

103
versus mean piston speed for the ensemble average method, not including the linear trend
data. For all conditions, there is a high degree of linearity between the mean piston speed
and turbulence intensity. The ports with the shrouded valve show a marked increase in
turbulence intensity compared to the non-shrouded valve. The port shape and orientation
is seen to have a weak effect on the turbulence intensity. There is fairly close agreement
between the small and large engines.
5
4
3
2
1
0
< u
' >
Ensem
ble
Avera
ge [m
/s]
543210
Vmps [m/s]
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Open Symbols: Small EngineFilled Symbols: Large Engine
Figure 5.12: Turbulence intensity at TDC versus mean piston speed using the ensemble
average method.
Figure 5.13 presents the linear trend slope of < u’ > vs. Vmps as a function of cutoff
frequency, fc, for the spatial-average method. For comparison, the slope using the
ensemble average method is included at fc = 0. As can be seen, using the spatial-
averaging method does not affect the conclusions of the effect of the shrouded valve

104
compared to the non-shrouded valve, or the port shape and orientation discussed above.
As expected, a higher cutoff frequency results in a decrease in turbulence intensity.
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
< u
' >
Spatial-A
vera
ge / V
mps
1.21.00.80.60.40.20.0
fc [mm-1
]
Ensemble Average
PP, 0º, SV
PP, 0º, NV
PP, 90º, NV
UP, 0º, SV
UP, 0º, NV
UP, 90º, NV
Open Symbols: Small EngineFilled Symbols: Large Engine
Figure 5.13: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Ensemble average data are included at fc = 0.
In order to compare the data in Fig. 5.13 on a non-dimensional basis, the cutoff
frequency was multiplied by the TDC clearance, hTDC, of each engine, the result is in Fig.
5.14. The data for both ports with the non-shrouded valves collapse well between the
two engines. The data with shrouded valves show good similarity, with slight differences
at higher cutoff frequencies.

105
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
< u
' >
Spatial-A
vera
ge / V
mps
86420
fc*hTDC
Ensemble Average
PP, 0º, SV
PP, 0º, NV
PP, 90º, NV
UP, 0º, SV
UP, 0º, NV
UP, 90º, NV
Open Symbols: Small EngineFilled Symbols: Large Engine
Figure 5.14: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Cutoff frequency made non-dimensional using TDC clearance.
Ensemble average data are included at fc = 0.
Figure 5.15 normalizes the data displayed in Fig. 5.14 by the ensemble-average
slope for each engine condition. It is seen that the data nearly collapse onto a single
curve.

106
0.1
2
3
4
5
6
7
8
91
< u
' >S
patial-A
vera
ge /
< u
' >E
nsem
ble
Avera
ge
3 4 5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
PP, 0º, SV
PP, 0º, NV
PP, 90º, NV
UP, 0º, SV
UP, 0º, NV
UP, 90º, NV
Open Symbols: Small EngineFilled Symbols: Large Engine
Figure 5.15: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Cutoff frequency made non-dimensional using TDC clearance. Spatial
average slopes normalized by ensemble average slope.
PIV data were acquired with both ports and shrouded valve in the large engine
using the second high-magnification FOV location, as shown in Fig. 5.4, and these data
were compared with the data from the high-magnification FOV. It was of interest to see
what differences might be present in the data, since on an ensemble average basis, the
swirl center was located nearer to the high-magnification FOV. Figure 5.16 shows the
turbulence intensity versus mean piston speed for the ensemble average method
comparing data taken in the two high-magnification FOVs in the large engine. There is
very little difference in the data, indicating at least for these conditions and analysis, the
turbulence if fairly homogeneous.

107
5
4
3
2
1
0
< u
' >
Ensem
ble
Avera
ge [m
/s]
543210
Vmps [m/s]
PP
UP
Large Engine, SV, 0-deg
Open Symbol: Second High-Magnification FOVFilled Symbol: High-Magnification FOV
Figure 5.16: Turbulence intensity at TDC versus mean piston speed using the ensemble
average method. Comparison of data taken in high-magnification FOV versus second
high-magnification FOV.
The data taken in the two high-magnification FOVs in the large engine were also
compared using the spatial-average method to determine the slope of < u’ > vs. Vmps, and
the results are shown in Fig. 5.17. Overall, there is fairly close agreement in the data,
indicating relatively homogenous turbulence in-cylinder.

108
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
< u
' >S
patial-A
vera
ge / V
mps
1.21.00.80.60.40.20.0
fc [mm-1
]
Ensemble Average
PP
UP
Large Engine, SV, 0-deg
Open Symbol: Second High-Magnification FOVFilled Symbol: High-Magnification FOV
Figure 5.17: TDC turbulence intensity versus mean piston speed slope using the spatial-
average method. Comparison of data taken in high-magnification FOV versus second
high-magnification FOV. Ensemble average data are included at fc = 0.
5.7.2. Correlation Length Scale Analysis
Two-point correlation data were calculated to estimate longitudinal and transverse
integral lengthscales. Integral lengthscales are a measure of the size of eddies in the
turbulent flow. The correlation coefficients were calculated in both x-(horizontal) and y-
(vertical) directions as
)()0(
)()0()(
22ruu
ruur
ji
ji
ij (5.10)
where the indices (i, j) refer to the components of the fluctuating velocity relative to the
direction of the calculation. For instance, u1 refers to the fluctuating x-velocity

109
component for the correlation in the x-(horizontal) direction, but u1 refers to the
fluctuating y-velocity component for the correlation in the y-(vertical) direction. ρ11 is
referred to as the longitudinal correlation coefficient and ρ22 is referred to as the
transverse correlation coefficient.
Two procedures were used to determine the correlation coefficients. A single-
sided correlation was calculated for the ensemble-averaged data. In this procedure for
example, in the horizontal (1) direction and for each row of fluctuating velocity data, the
correlation coefficient was calculated between the velocity at the leftmost position in the
row and the respective velocity component r to the right; a similar calculation was
performed starting at the rightmost position with a displacement r to the left. The values
for a given separation distance were then averaged over all rows, and all engine cycles.
A double-sided correlation was calculated for the spatial-averaged data. As
mentioned previously with the spatial-averaged data, there were edge effects inherent
from the use of the Fourier-based filtering method. These edge effects were evident in
calculating single-sided correlations with the spatial-averaged data, even after eliminating
the five rows or columns of data nearest the edge of the image. Thus, a slightly different
procedure was used to calculate the spatial-average correlation coefficients. This
procedure gives rise to what will be referred to as a double-sided correlation. In this
procedure for example, in the horizontal (1) direction and for each row of fluctuating
velocity data, the double-sided correlation coefficient was calculated between the
velocity in the center of the row and the respective velocity component a distance r to the
left and to the right of the center. The values for a given separation distance were then
averaged over all rows, and all engine cycles. Because of this procedure, the double-

110
sided correlation coefficients extend to a distance that is only half the width or height of
the PIV image.
Even though two different procedures are being used to calculate the correlation
coefficients, both single- and double-sided correlation procedures give nearly identical
results when analyzing the ensemble-averaged data. Figure 5.18 shows representative
data using both correlation procedures and both averaging methods to calculate the
longitudinal and transverse correlation coefficients in the vertical direction for a given
engine condition. It can be seen that there is very good agreement between the ensemble-
averaged data single- and double-sided correlations, and it is believed that the use of the
double-sided procedure is not affecting the results, but effectively eliminates issues
associated with the spatial filtering procedure. It is observed that the spatial-averaged
correlations more quickly die off for short cutoff lengths (high cutoff frequencies), which
is consistent with expectation.
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
ρ11
121086420
Δy [mm]
Double-sided
Single-sided
Lc = 5 mm
Lc = 10 mm
Lc = 15 mm
Open Symbol: Ensemble-averagedFilled Symbol: Spatial-averaged, Double-sided
(a)

111
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
ρ22
121086420
Δy [mm]
Double-sided
Single-sided
Lc = 5 mm
Lc = 10 mm
Lc = 15 mm
Open Symbol: Ensemble-averagedFilled Symbol: Spatial-averaged, Double-sided
(b)
Figure 5.18: Representative single- and double-sided correlations in the vertical
direction using ensemble- and spatial-averaged data using three cutoff lengthscales.
Engine condition: Large engine, UP, SV, 0-deg orientation.
Longitudinal and transverse integral lengthscales were calculated using the
correlation data. The longitudinal lengthscale, L11, is defined as
drL0
1111 (5.11)
where dr equals dx or dy depending on the direction under investigation. Similarly, the
transverse lengthscale, L22, is defined as
.0
2222 drL (5.12)

112
The integrals were approximated by simple rectangular integration at each data point up
until the first zero crossing point. The longitudinal correlation data did not always cross
the zero ordinate, e.g. Fig. 5.18(a), so a best-fit equation was used to extend the data to
the zero crossing. (There were a couple engine conditions where the ensemble-averaged
data transverse correlations did not cross the zero ordinate, but were close enough such
that using the best-fit equation did not significantly affect the lengthscale calculation.
Therefore, all transverse lengthscales reported were calculated without the best-fit
equation.) The best-fit equation used was a double-modified exponential empirical
function [33] defined as
).exp(2
1)exp(2
1 xdxd
cxbxb
aR (5.13)
Equation 5.13 was fit to the correlation coefficients by minimizing the sum squared
difference for all data points. The best-fit curves were then used to compute the
longitudinal integral lengthscales, Eqn. 5.11, by approximating the integral using simple
rectangular integration up until the first zero crossing point.
5.7.2.1. Correlation Length Scale Analysis – Ensemble-Average Method
Figure 5.19 shows the longitudinal and transverse single-sided correlation results
for a given engine condition. Also included are the cross-velocity correlations ρ12 and
ρ21, which for all conditions tended to be close to zero as expected. According to [60], in
homogeneous isotropic turbulence with zero mean velocity, the two-point correlation, ρij
= 0 for i ≠ j. The best-fit curve is also included in the figure.

113
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
ρ
2520151050
Δy [mm]
ρ11
ρ22
ρ12
ρ21
ρ11 Best-Fit
Figure 5.19: Correlation coefficients using the ensemble average method in the vertical
direction. Engine condition: large engine, utility port, shrouded valve, 0-degree
orientation, 1200 rpm.
Figure 5.20 shows the longitudinal and transverse integral lengthscales versus
mean piston speed for both engines for a given engine condition. To make a more
meaningful comparison between the engines, all integral lengthscale data have been made
non-dimensional by the TDC clearance height, hTDC. Figure 5.21 shows the resulting
non-dimensional integral lengthscales versus mean piston speed for all engine conditions.
There appears to be fairly close agreement between the large and small engines. Figure
5.22 shows the non-dimensional integral lengthscales calculated in the vertical direction
versus the horizontal direction for all engine conditions and speeds. As can be seen, there
is close agreement between the lengthscales in either direction, indicating a high level of

114
isotropy. Over the range of engine speeds tested, the L11 and L22 values stay fairly
constant, and because of this, an average lengthscale was calculated over the four engine
speeds for the large engine and three engine speeds for the small engine, these are
included in the Table 5.3. For isotropic turbulence the transverse integral scale is one
half of the longitudinal scale [60]. For all engine conditions, L22/ L11 averaged over all
engine speeds ranged between 0.62 and 0.38 with a mean of 0.50 for the large engine,
and for the small engine ranged between 0.63 and 0.40 with a mean of 0.49, close to the
isotropic limit.
10
8
6
4
2
0
Lii
[mm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
UP, SV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
Figure 5.20: Longitudinal and transverse integral lengthscales versus mean piston speed
in the vertical and horizontal directions using the ensemble average method. Engine
condition: utility port, shrouded valve, 0-degree orientation.

115
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
UP, SV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(a)
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
UP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(b)

116
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
UP, NV, 90-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(c)
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
PP, SV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(d)

117
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
PP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(e)
1.0
0.8
0.6
0.4
0.2
0.0
Lii
/ h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
L11, Vertical
L22, Vertical
L11, Horizontal
L22, Horizontal
PP, NV, 90-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(f)

118
Figure 5.21: Non-dimensional longitudinal and transverse integral lengthscales versus
mean piston speed in the vertical and horizontal directions using the ensemble average
method. Engine conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg.,
and Performance port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.
1.0
0.8
0.6
0.4
0.2
0.0
Lii (V
ert
ical) / h
TD
C
1.00.80.60.40.20.0
Lii (Horizontal) / hTDC
L11
L22
One-to-One Line
Open Symbol: Small EngineFilled Symbol: Large Engine
Figure 5.22: Non-dimensional integral lengthscales for all engine conditions and speeds
in the vertical versus horizontal directions using the ensemble average method.
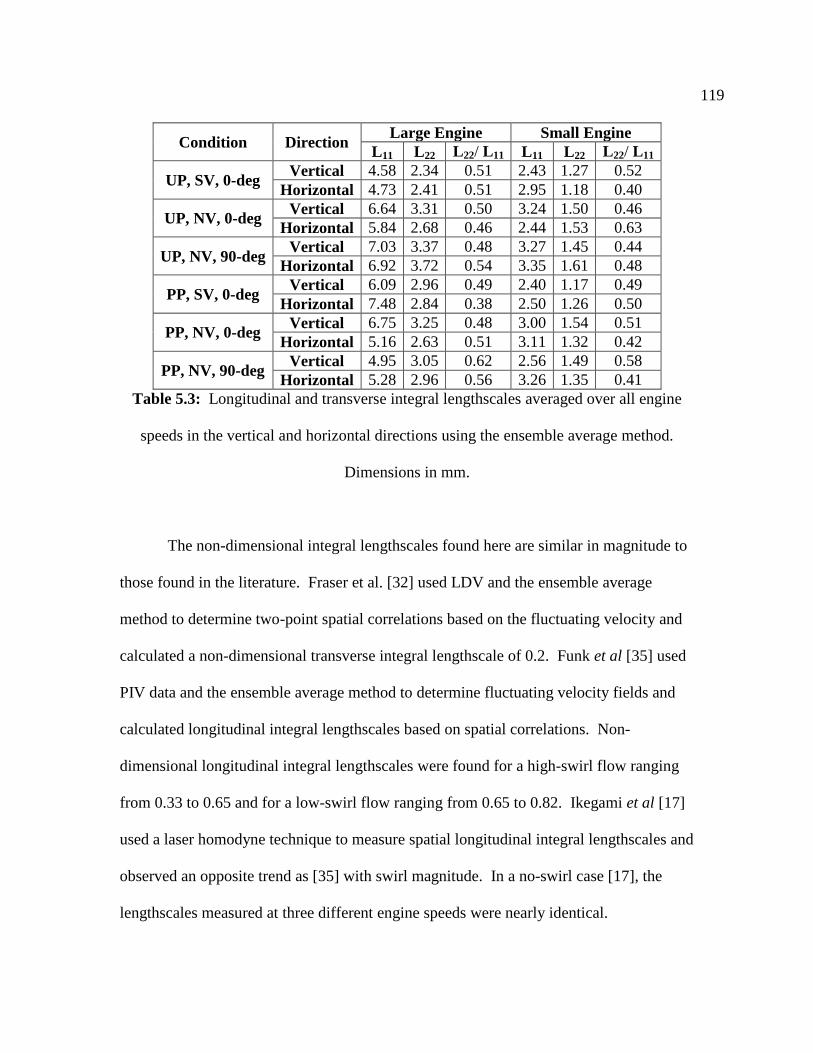
119
Condition Direction Large Engine Small Engine
L11 L22 L22/ L11 L11 L22 L22/ L11
UP, SV, 0-deg Vertical 4.58 2.34 0.51 2.43 1.27 0.52
Horizontal 4.73 2.41 0.51 2.95 1.18 0.40
UP, NV, 0-deg Vertical 6.64 3.31 0.50 3.24 1.50 0.46
Horizontal 5.84 2.68 0.46 2.44 1.53 0.63
UP, NV, 90-deg Vertical 7.03 3.37 0.48 3.27 1.45 0.44
Horizontal 6.92 3.72 0.54 3.35 1.61 0.48
PP, SV, 0-deg Vertical 6.09 2.96 0.49 2.40 1.17 0.49
Horizontal 7.48 2.84 0.38 2.50 1.26 0.50
PP, NV, 0-deg Vertical 6.75 3.25 0.48 3.00 1.54 0.51
Horizontal 5.16 2.63 0.51 3.11 1.32 0.42
PP, NV, 90-deg Vertical 4.95 3.05 0.62 2.56 1.49 0.58
Horizontal 5.28 2.96 0.56 3.26 1.35 0.41
Table 5.3: Longitudinal and transverse integral lengthscales averaged over all engine
speeds in the vertical and horizontal directions using the ensemble average method.
Dimensions in mm.
The non-dimensional integral lengthscales found here are similar in magnitude to
those found in the literature. Fraser et al. [32] used LDV and the ensemble average
method to determine two-point spatial correlations based on the fluctuating velocity and
calculated a non-dimensional transverse integral lengthscale of 0.2. Funk et al [35] used
PIV data and the ensemble average method to determine fluctuating velocity fields and
calculated longitudinal integral lengthscales based on spatial correlations. Non-
dimensional longitudinal integral lengthscales were found for a high-swirl flow ranging
from 0.33 to 0.65 and for a low-swirl flow ranging from 0.65 to 0.82. Ikegami et al [17]
used a laser homodyne technique to measure spatial longitudinal integral lengthscales and
observed an opposite trend as [35] with swirl magnitude. In a no-swirl case [17], the
lengthscales measured at three different engine speeds were nearly identical.

120
For some engine conditions the best-fit curve extended for a substantial distance,
which may have caused a bias in the calculation of L11. Because of this, a modified
longitudinal integral lengthscale, L11*, was calculated by directly integrating the
correlation data up to the final data point or up to the zero crossing point, whichever
occurred first. Because the high-magnification FOV horizontal distance is 1.25 times the
vertical distance, L11* was calculated in the horizontal direction by integrating the
correlation data up to a maximum distance equal to the vertical direction distance. This
was done so that a comparison could be made between the small and large engines
without the influence of a best-fit curve. L11* is not to be considered a true measure of
L11. Note that the distance to the final data point scales by the scaling factor between the
small and large engines because the high-magnification FOV scales between the two
engines. Figure 5.23 shows L11* made non-dimensional by hTDC versus mean piston
speed for all engine conditions. There appears to be good similarity in the modified
integral lengthscale between the two engines. Figure 5.24 shows the modified non-
dimensional integral lengthscales calculated in the vertical direction versus the horizontal
direction for all engine conditions and speeds. Compared with the longitudinal integral
lengthscales seen in Fig. 5.22, the data exhibit less scatter. There is close agreement
between the lengthscales in either direction, indicating a high level of isotropy, and the
difference between the small and large engine data appear smaller.

121
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
UP, SV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
UP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(a) (b)
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
UP, NV, 90-degOpen Symbol: Small EngineFilled Symbol: Large Engine
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
PP, SV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(c) (d)

122
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
PP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
1.0
0.8
0.6
0.4
0.2
0.0
L11
* / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
Vertical
Horizontal
PP, NV, 90-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(e) (f)
Figure 5.23: Non-dimensional modified longitudinal integral lengthscales versus mean
piston speed in the vertical and horizontal directions using the ensemble average method.
Engine conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and
Performance port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.
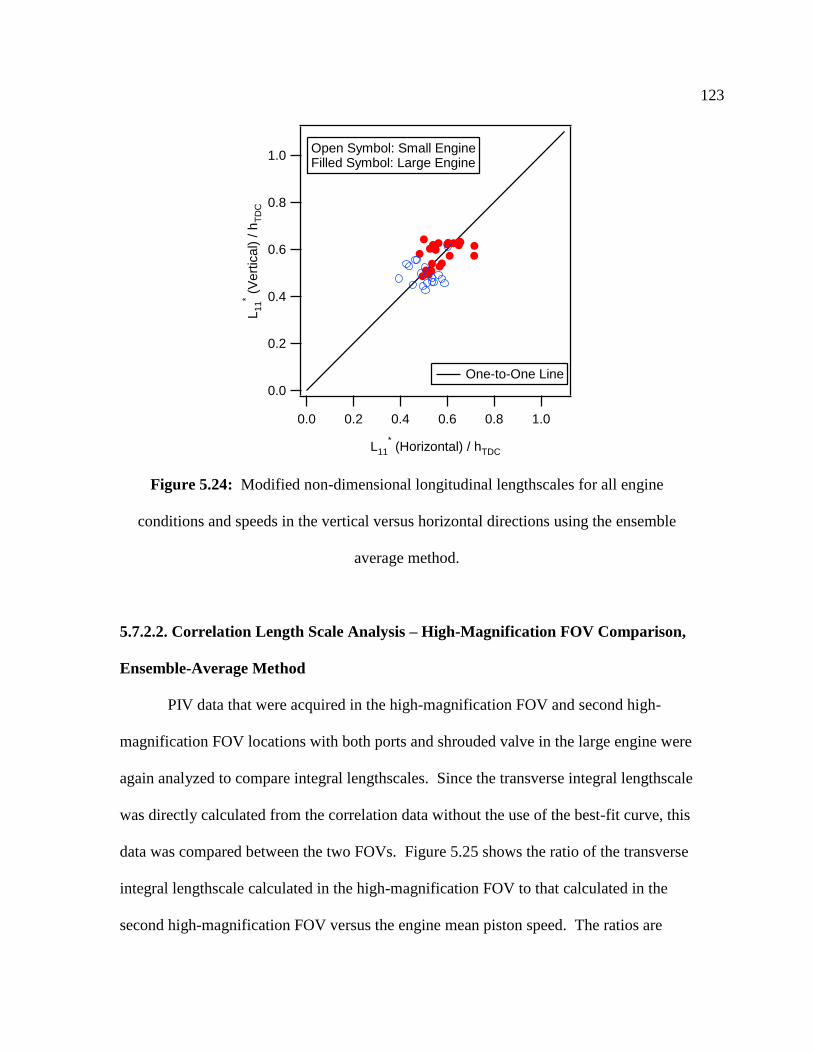
123
1.0
0.8
0.6
0.4
0.2
0.0
L11
* (V
ert
ical) / h
TD
C
1.00.80.60.40.20.0
L11
* (Horizontal) / hTDC
Open Symbol: Small EngineFilled Symbol: Large Engine
One-to-One Line
Figure 5.24: Modified non-dimensional longitudinal lengthscales for all engine
conditions and speeds in the vertical versus horizontal directions using the ensemble
average method.
5.7.2.2. Correlation Length Scale Analysis – High-Magnification FOV Comparison,
Ensemble-Average Method
PIV data that were acquired in the high-magnification FOV and second high-
magnification FOV locations with both ports and shrouded valve in the large engine were
again analyzed to compare integral lengthscales. Since the transverse integral lengthscale
was directly calculated from the correlation data without the use of the best-fit curve, this
data was compared between the two FOVs. Figure 5.25 shows the ratio of the transverse
integral lengthscale calculated in the high-magnification FOV to that calculated in the
second high-magnification FOV versus the engine mean piston speed. The ratios are

124
close to one, with the majority of data points being slightly greater than one. For
homogeneous turbulence, one would expect these ratios to be unity, thus there is some
inhomogeneity in the length scale despite the high level of homogeneity seen in the
turbulence intensity (see Fig. 5.16).
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
L22(H
.-M
. F
OV
) /
L22(S
eco
nd
H.-
M.
FO
V)
3.02.52.01.51.00.5
Vmps [m/s]
PP, Vertical
PP, Horizontal
UP, Vertical
UP, Horizontal
Large Engine, SV, 0-deg
Figure 5.25: Comparison of transverse integral lengthscales calculated in the two high-
magnification FOVs versus mean piston speed in the vertical and horizontal directions
using the ensemble average method.
5.7.2.3. Correlation Length Scale Analysis – Spatial-Average Method
For the spatial-average method, both first-choice and interpolated velocity vectors
were included in the analysis of determining the average velocity fields and the resulting
correlations. The correlations in the horizontal and vertical directions were calculated
according to the double-sided procedure. Integral lengthscales were again calculated

125
using Eqs. 5.11 and 5.12 where the integrals were approximated by simple rectangular
integration at each data point up until the first zero crossing point. Equation 5.13 was
used to extend the longitudinal correlation data to the zero ordinate; the transverse
correlations crossed the axis over the entire range of cutoff lengthscales used in the
analysis. As the correlations exhibited oscillatory behavior about the zero ordinate for
small cutoff lengths (see Fig. 5.18(a)), it was necessary to change the fitting procedure
for the longitudinal correlation coefficients. In computing the minimum sum squared
difference between the best-fit equation and the correlation data, at each data point the
squared difference was divided by the separation distance. This applied a weighting to
the fit of the best-fit equation, allowing it to more faithfully match the correlation data at
small separation distances. Figure 5.26 shows the same spatial-averaged longitudinal
correlation results as Fig. 5.18(a), now with the best-fit curves using the applied
weighting. The best-fit curves are seen to follow the data at small separation distances
fairly well.

126
1.0
0.8
0.6
0.4
0.2
0.0
-0.2
ρ11
121086420
Δy [mm]
Lc = 5 mm, Best-Fit
Lc = 10 mm, Best-Fit
Lc = 15 mm, Best-Fit
Figure 5.26: Representative double-sided correlations in the vertical direction for
spatial-averaged data using three cutoff lengthscales and corresponding best-fit curves.
Engine condition: Large engine, UP, SV, 0-deg orientation.
Using this method, the integral lengthscales based on the spatial-average
correlation data were calculated. Figure 5.27 shows the longitudinal and transverse
lengthscales in the horizontal direction as a function of the cutoff frequency for both
engines with the utility port in the 0-degree orientation and non-shrouded valve. Labels
indicating the engine mean piston speed are omitted since the lengthscales change little
with engine speed. Figure 5.27(a) shows the integral lengthscales versus cutoff
frequency. In the same manner as for the ensemble average data, Fig. 5.27(b) shows the
integral lengthscales made non-dimensional by the TDC clearance, hTDC. The data do not
exhibit similarity. Finally, Fig. 5.27(c) shows the same data with the cutoff frequency

127
made non-dimensional by hTDC. The data now collapse onto two distinct curves for the
longitudinal and transverse lengthscales. Also, examining the figures, the small engine
lengthscales at small fc (large Lc) seem to level off. However, this is likely a result of the
larger Lc used in this analysis being greater than the dimensions of the small engine high-
magnification FOV, as this will affect the calculation of the spatial-average velocity field.
In light of this effect, the remaining data will be shown only for Lc equal to or smaller
than the image domain size (8 mm for the small engine and 14 mm for the large engine).
3.0
2.5
2.0
1.5
1.0
0.5
Lii
(Horizonta
l) [m
m]
6 7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
L11
L22
UP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
(a)

128
0.5
0.4
0.3
0.2
0.1
Lii
(Ho
rizo
nta
l) /
hT
DC
6 7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
UP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
L11
L22
(b)
0.5
0.4
0.3
0.2
0.1
Lii
(Ho
rizo
nta
l) /
hT
DC
3 4 5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 0-degOpen Symbol: Small EngineFilled Symbol: Large Engine
L11
L22
(c)
Figure 5.27: Longitudinal and transverse integral lengthscales in the horizontal direction
using the spatial-average method. (a) Lii versus fc, (b) Lii/hTDC versus fc, and (c) Lii/hTDC

129
versus fc*hTDC. Engine condition: Utility port, non-shrouded valve, 0-degree orientation,
all engine speeds.
The remaining engine conditions were analyzed in the same manner with both the
integral lengthscales and cutoff frequency made non-dimensional by the TDC clearance.
The results are shown in Fig. 5.28. Again, there is fairly close agreement between the
engines when the data are made non-dimensional in this fashion. The transverse
lengthscales in both the vertical and horizontal directions give very similar results for a
given engine condition. Further, the transverse lengthscales are seen to be quite
consistent comparing all conditions. The longitudinal lengthscales at the lower values of
fc are seen to be somewhat erratic and oscillatory. This is due, in part, to the method used
to fit Eqn. 5.13 to the correlation data, the rate at which the best-fit equation tended to
zero was sensitive to the shape of the correlation data.
0.8
0.6
0.4
0.2
0.0
Lii
(Horizonta
l) / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
L11
L22
0.8
0.6
0.4
0.2
0.0
Lii
(Vert
ical) / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
L11
L22
(a) (b)
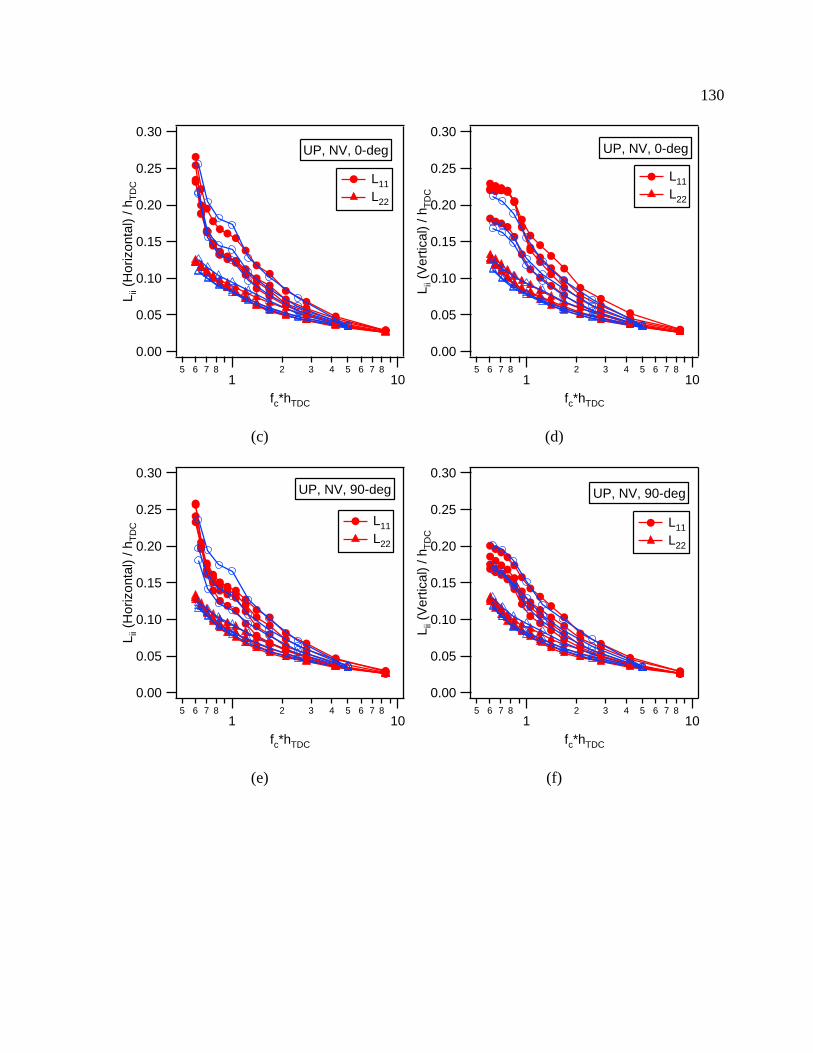
130
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ho
rizo
nta
l) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
UP, NV, 0-deg
L11
L22
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ve
rtic
al) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
UP, NV, 0-deg
L11
L22
(c) (d)
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Horizo
nta
l) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
UP, NV, 90-deg
L11
L22
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ve
rtic
al) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
UP, NV, 90-deg
L11
L22
(e) (f)

131
1.0
0.8
0.6
0.4
0.2
0.0
Lii
(Horizonta
l) / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, SV, 0-deg
L11
L22
1.0
0.8
0.6
0.4
0.2
0.0
Lii
(Vert
ical) / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, SV, 0-deg
L11
L22
(g) (h)
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ho
rizo
nta
l) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
PP, NV, 0-deg
L11
L22
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Vert
ica
l) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
PP, NV, 0-deg
L11
L22
(i) (j)

132
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ho
rizo
nta
l) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
PP, NV, 90-deg
L11
L22
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Lii
(Ve
rtic
al) /
hT
DC
5 6 7 8
12 3 4 5 6 7 8
10
fc*hTDC
PP, NV, 90-deg
L11
L22
(k) (l)
Figure 5.28: Longitudinal and transverse integral lengthscales in the horizontal and
vertical directions using the spatial-average method. Open symbols: small engine, filled
symbols: large engine. Engine conditions: Utility port, (a)-(b) SV, 0-deg., (c)-(d) NV, 0-
deg., (e)-(f) NV, 90-deg., and Performance port, (g)-(h) SV, 0-deg., (i)-(j) NV, 0-deg.,
(k)-(l) NV, 90-deg.
5.7.2.4. Correlation Length Scale Analysis – High-Magnification FOV Comparison,
Spatial-Average Method
PIV data that were acquired in the high-magnification FOV and second high-
magnification FOV locations with both ports and shrouded valve in the large engine were
again analyzed to compare integral lengthscales, this time using the spatial-average data.
Again, since the transverse integral lengthscale was directly calculated from the
correlation data without the use of the best-fit curve, these data were compared between
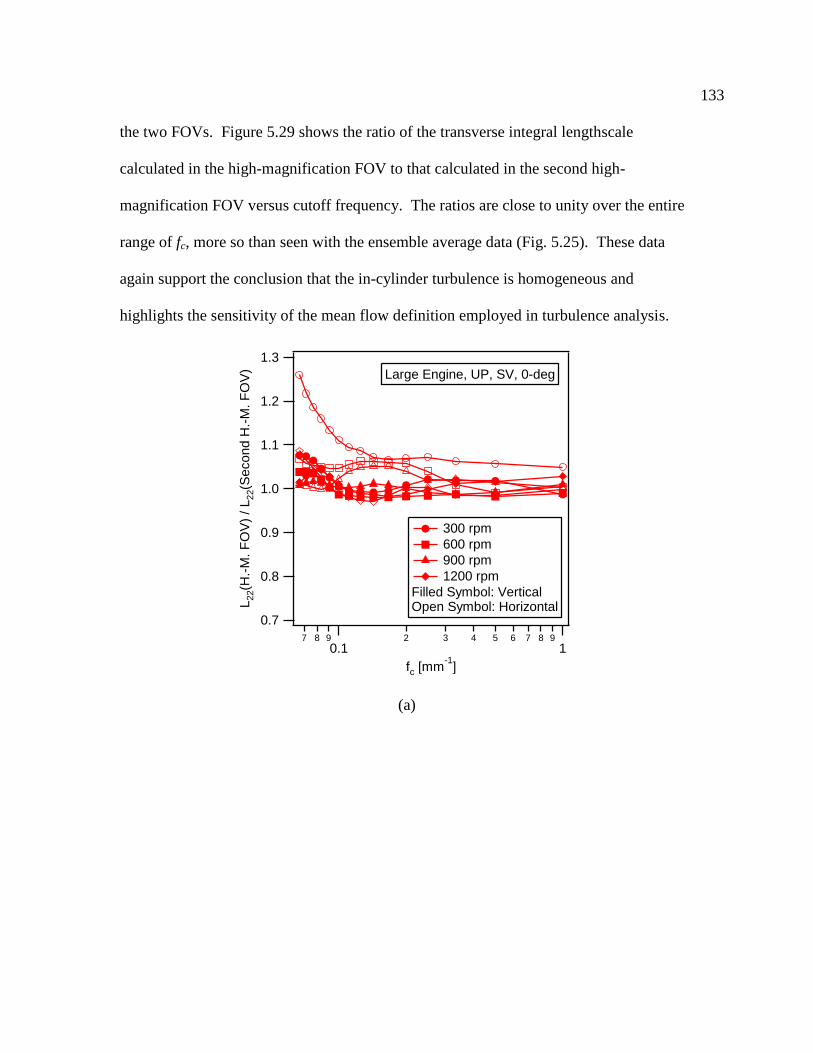
133
the two FOVs. Figure 5.29 shows the ratio of the transverse integral lengthscale
calculated in the high-magnification FOV to that calculated in the second high-
magnification FOV versus cutoff frequency. The ratios are close to unity over the entire
range of fc, more so than seen with the ensemble average data (Fig. 5.25). These data
again support the conclusion that the in-cylinder turbulence is homogeneous and
highlights the sensitivity of the mean flow definition employed in turbulence analysis.
1.3
1.2
1.1
1.0
0.9
0.8
0.7
L22(H
.-M
. F
OV
) /
L22(S
eco
nd
H.-
M.
FO
V)
7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
Large Engine, UP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
Filled Symbol: VerticalOpen Symbol: Horizontal
(a)

134
1.3
1.2
1.1
1.0
0.9
0.8
0.7
L22(H
.-M
. F
OV
) /
L22(S
eco
nd
H.-
M.
FO
V)
7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
Large Engine, PP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
Filled Symbol: VerticalOpen Symbol: Horizontal
(b)
Figure 5.29: Comparison of transverse integral lengthscales calculated in the two high-
magnification FOVs versus fc in the vertical and horizontal directions using the spatial-
average method. Engine condition: large engine, (a) utility port, shrouded valve, 0-deg.
orientation, and (b) performance port, shrouded valve, 0-deg. orientation.
5.7.3. Energy Spectra Analysis
A one-dimensional kinetic energy spectrum, E11( 1), was calculated from the PIV
data in both the vertical and horizontal directions. Analysis was performed for all engine
conditions using the ensemble- and spatial-average methods.
The turbulent kinetic energy, k, was calculated at each velocity vector location
and for each engine cycle as

135
.2
3)(
2
1 22 vuk (5.14)
The multiplication by the 3/2 term assumes the flow is isotropic to convert the two-
dimensional turbulent kinetic energy into its three-dimensional equivalent. It is assumed
that the flow is isotropic a priori before computing further statistics of the flow.
However, omitting the 3/2 term will not affect the resulting similarity, or lack thereof, in
the spectra, which is a measure of the isotropy. An interlacing technique described in
[46] was used to compute the one-dimensional kinetic energy spectrum. The horizontal
and vertical spectra were computed in the same manner. For example in the x-direction,
the FFT of k was performed on a row and then multiplied by the complex conjugate of
the FFT of the adjacent row to produce an energy spectrum. This procedure was
performed on all adjacent rows and the results were averaged over all rows, and all
engine cycles to arrive at a mean spectrum. The corresponding one-dimensional
wavenumbers, κ1, in the horizontal direction are
2/,...,1,02
1 columns
columns
NjforjXN
(5.15)
where ΔX is the horizontal distance between two adjacent velocity vectors (217 μm for
the large engine and 128 μm for the small engine) and Ncolumns is the (even) number of
columns of PIV data.
A one-dimensional model spectrum from Pope [60] was then matched to the
calculated spectrum. The model energy spectrum function is defined as
ffCE £3/53/2)( (5.16)

136
where C is a constant equal to 1.5, ε is the rate of dissipation of turbulent kinetic energy,
and f£ and fη are non-dimensional functions [60]. In order to compute the model energy
spectrum function, a turbulence Reynolds number, Re£, must first be assumed, and is
defined as
3/422/1
£
£ £Re
kk (5.16)
where £ is a lengthscale characteristic of the large eddies of the flow and is given by
k3/2
/ε, η is the Kolmogorov lengthscale, and ν is the kinematic viscosity. Here, k is the
turbulent kinetic energy averaged over all vector locations and engine cycles, i.e. <k>.
Based on Re£ and k, all other parameters needed to calculate E(κ) can be determined. In
particular, ε can be written as a function of k and Re£ from Eqn. 5.16; the experimental
value of k was used. The one-dimensional model kinetic energy spectrum can then be
calculated using [60]
.1)(
)(
1
2
2
1111 d
EE (5.17)
An algorithm was developed that finds Re£ and £ (η and £ are related from η = £ Re£ -3/4
)
that minimizes the sum squared difference between the measured and model one-
dimensional energy spectra. Once £ and Re£ are determined, the corresponding model
energy spectrum function can also be used to calculate the longitudinal integral
lengthscale as [60]
dE
uL
02
1
11
)(
2 (5.18)

137
where <u12> is the average squared fluctuating velocity component in the same direction
as the horizontal or vertical analysis, where the average is taken over all vector locations
and all engine cycles.
5.7.3.1. Energy Spectra Analysis – Ensemble Average Method
Figure 5.29(a) shows the results for the large engine with the utility port and the
shrouded valve at 1200 rpm using the ensemble-average method of finding the mean
velocity field. Both vertical and horizontal spectra are displayed. The data axes are non-
dimensionalized using ε, η, and ν. As can be seen in Fig. 5.29, the measured horizontal
and vertical spectra are closely matched, suggesting a high level of isotropy. The
calculated spectra follow Pope‟s model spectrum through the inertial subrange where the
energy spectra acquire the traditional -5/3 wavenumber power law dependence. At the
higher wavenumbers, there is a slight trailing off of the calculated spectra compared to
the model spectra. The measured spectra begin to deviate from the model spectra close to
a wavenumber corresponding to twice the interrogation region size of 868 m, or 0.007
rad/ m, which corresponds to the true Nyquist limit because the real sampling distance is
the interrogation window size (434 m) and not the vector spacing. Figure 5.29(b) shows
the same analysis for the small engine with the utility port and the shrouded valve at 1800
rpm. Again, a similar result is observed with the measured spectra beginning to deviate
from the model spectra close to a wavenumber corresponding to twice the interrogation
region size of 512 m, or 0.012 rad/ m.

138
106
107
108
109
1010
1011
1012
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
2x Interrogation Size
Interrogation Size
Horizontal
Model - Horizontal Vertical
Model - Vertical Slope -5/3
Large EngineUP, SV, 0-deg1200 rpm
(a)
105
106
107
108
109
1010
1011
1012
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
2x Interrogation Size
Interrogation Size
Small EngineUP, SV, 0-deg1800 rpm
Horizontal
Model - Horizontal Vertical
Model - Vertical Slope -5/3
(b)
Figure 5.29: Model and calculated one-dimensional energy spectra in the vertical and
horizontal directions using the ensemble average method to determine the mean velocity

139
field. Engine condition: utility port, 0-degree orientation, shrouded valve, (a) large
engine at 1200 rpm and (b) small engine at 1800 rpm.
Figures 5.30(a) and (b) show the vertical analysis results for the utility port using
the shrouded valve over the range of engine speeds for the large and small engines,
respectively. There are two main effects of the engine speed. Firstly, the higher engine
speed gives rise to a higher kinetic energy, which is seen as the integral under the curves.
The second effect is that as the engine speed decreases, the inertial subrange shortens.
For the large engine at 300 rpm and the small engine at 600 rpm, there is not much of the
spectra following the -5/3
dependence. This suggests that the scale separation principles
of Kolmogorov may not be satisfied.
105
106
107
108
109
1010
1011
1012
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
300 rpm
600 rpm
900 rpm
1200 rpm
UP, SV, 0-degVertical Direction
Model, 300 rpm Model, 1200 rpm Slope -5/3
Large Engine
(a)

140
105
106
107
108
109
1010
1011
1012
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
600 rpm
1200 rpm
1800 rpm
UP, SV, 0-degVertical Direction
Model, 600 rpm Model, 1800 rpm Slope -5/3
Small Engine
(b)
Figure 5.30: Model and calculated one-dimensional energy spectra in the vertical
direction using the ensemble average method to determine the mean velocity field.
Engine condition: utility port, 0-degree orientation, shrouded valve, (a) large engine at
300-1200 rpm and (b) small engine at 600-1800 rpm.
5.7.3.2. Energy Spectra Analysis – Ensemble Average Method: L11
The resulting longitudinal integral lengthscales found in the vertical and
horizontal directions for both engines and each engine condition were normalized by the
TDC clearance, hTDC, and are shown versus mean piston speed in Fig. 5.31. The
longitudinal integral lengthscale is seen to stay relatively constant with mean piston speed
for all engine conditions, similar to the results in §5.7.2.1 where the lengthscales were
calculated using the correlation data. Inspecting Eqn. 5.18, it would be expected that L11

141
should remain nearly constant as E(κ) integrates to <k> and the ratio of <k> to <u12> is
nearly constant. The normalized L11 also show good similarity between the small and
large engines, for all engine conditions achieving a value of about 0.2. Compared with
L11 /hTDC from §5.7.2.1, this analysis give values that are about two to three times lower
in magnitude.
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, SV, 0-deg
Vertical
Horizontal
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 0-deg
Vertical
Horizontal
(a) (b)
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 90-deg
Vertical
Horizontal
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
Vertical
Horizontal
(c) (d)

142
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 0-deg
Vertical
Horizontal
0.6
0.5
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 90-deg
Vertical
Horizontal
(e) (f)
Figure 5.31: Non-dimensional longitudinal integral lengthscales versus mean piston
speed in the vertical and horizontal directions using the energy spectra analysis-ensemble
average method. Open symbols: small engine, filled symbols: large engine. Engine
conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance
port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.
5.7.3.3. Energy Spectra Analysis – Ensemble Average Method: L11, High-
Magnification FOV Comparison
PIV data that were acquired in the high-magnification FOV and second high-
magnification FOV locations with both ports and the shrouded valve in the large engine
were again analyzed to compare longitudinal integral lengthscales. Figure 5.32 shows the
ratio of L11 calculated in the high-magnification FOV to that calculated in the second
high-magnification FOV versus the engine mean piston speed using the energy spectra

143
analysis. The ratios are again close to unity, indicating a measure of homogeneity in the
flow. Compared to Fig. 5.25, where L22 was calculated using correlation data with the
ensemble average method and the ratio found between the two FOVs, the magnitudes of
the ratios are very similar.
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
L11(H
.-M
. F
OV
) /
L11(S
eco
nd
H.-
M.
FO
V)
3.02.52.01.51.00.5
Vmps [m/s]
PP, Vertical
PP, Horizontal
UP, Vertical
UP, Horizontal
Large Engine, SV, 0-deg
Figure 5.32: Comparison of longitudinal integral lengthscales calculated in the two
high-magnification FOVs versus mean piston speed in the vertical and horizontal
directions using the energy spectra analysis-ensemble average method. Engine condition:
large engine, utility port, 0-deg. orientation, shrouded valve and performance port, 0-deg.
orientation, shrouded valve.
5.7.3.4. Energy Spectra Analysis – Ensemble Average Method: Re£
The resulting turbulence Reynolds numbers found in the vertical and horizontal
directions for both engines and each engine condition are shown versus mean piston

144
speed in Fig. 5.33. Examining the data, the turbulence Reynolds number increases
monotonically with engine speed for all engine conditions. The ports with the shrouded
valve compared to the non-shrouded valve exhibit turbulence Reynolds numbers of
greater magnitude at the same mean piston speed. For a given mean piston speed and
engine condition, the large engine turbulence Reynolds numbers are roughly two to three
times greater in magnitude compared to the small engine.
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, SV, 0-deg
Vertical
Horizontal
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 0-deg
Vertical
Horizontal
(a) (b)

145
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 90-deg
Vertical
Horizontal
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
Vertical
Horizontal
(c) (d)
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 0-deg
Vertical
Horizontal
5000
4000
3000
2000
1000
0
Re
£
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 90-deg
Vertical
Horizontal
(e) (f)
Figure 5.33: Turbulence Reynolds number versus mean piston speed in the vertical and
horizontal directions using the energy spectra analysis-ensemble average method. Open
symbols: small engine, filled symbols: large engine. Engine conditions: Utility port, (a)
SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e)
NV, 0-deg., (f) NV, 90-deg.

146
5.7.3.5. Energy Spectra Analysis – Ensemble Average Method: η
The resulting Kolmogorov lengthscales found in the vertical and horizontal
directions for both engines and each engine condition are shown versus mean piston
speed in Fig. 5.34. Examining the data, the Kolmogorov lengthscale decreases
monotonically with engine speed for all engine conditions. The ports with the shrouded
valve compared to the non-shrouded valve exhibit Kolmogorov lengthscales of smaller
magnitude at the same mean piston speed. Between the small and large engines, the
Kolmogorov lengthscales are roughly the same for a given mean piston speed. An
overview of all the parameters points to an interesting dynamic. The large-scale
turbulence or integral lengthscales are determined by the geometry of the engine, and so
they scale by the size of the engine. At the same mean piston speed, the turbulence
Reynolds numbers of the small engine compared to the large engine decreases in such a
way that the small-scale turbulence or Kolmogorov lengthscales are similar. The flows
created by the shrouded versus non-shrouded valves indicate higher turbulence Reynolds
numbers, effectively pushing the Kolmogorov lengthscales farther down the energy
cascade to smaller lengthscales.

147
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, SV, 0-deg
Vertical
Horizontal
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 0-deg
Vertical
Horizontal
(a) (b)
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 90-deg
Vertical
Horizontal
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
Vertical
Horizontal
(c) (d)

148
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 0-deg
Vertical
Horizontal
40
30
20
10
0
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 90-deg
Vertical
Horizontal
(e) (f)
Figure 5.34: Kolmogorov lengthscales versus mean piston speed in the vertical and
horizontal directions using the energy spectra analysis-ensemble average method. Open
symbols: small engine, filled symbols: large engine. Engine conditions: Utility port, (a)
SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e)
NV, 0-deg., (f) NV, 90-deg.
5.7.3.6. Energy Spectra Analysis – Spatial-Average Method
The same one-dimensional kinetic energy spectrum analysis was performed for all
engine conditions using the spatial-average method to obtain the mean velocity field for
each engine cycle. Figure 5.35(a) shows the vertical spectra results for the large engine
utility port at 1200 rpm and the shrouded valve using three different cutoff lengthscales.
The portion of the energy spectra that follows the traditional -5/3 wavenumber power law
dependence becomes smaller as the cutoff lengthscale decreases. Figure 5.35(b) shows
the same analysis for the small engine utility port at 1200 rpm and the shrouded valve.

149
Again, a similar trend is observed as the cutoff lengthscale decreases. The energy
spectrum analysis was performed over cutoff lengthscales ranging from 1 to 15 mm. The
longitudinal integral lengthscales, Kolmogorov lengthscales, and turbulence Reynolds
numbers were again calculated.
106
107
108
109
1010
1011
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
Lc = 5 mm
Lc = 10 mm
Lc = 15 mm
Model, Lc = 5 mm
Model, Lc = 10 mm
Model, Lc = 15 mm
Slope -5/3
Large Engine, 1200 rpmUP, SV, 0-degVertical Direction
(a)
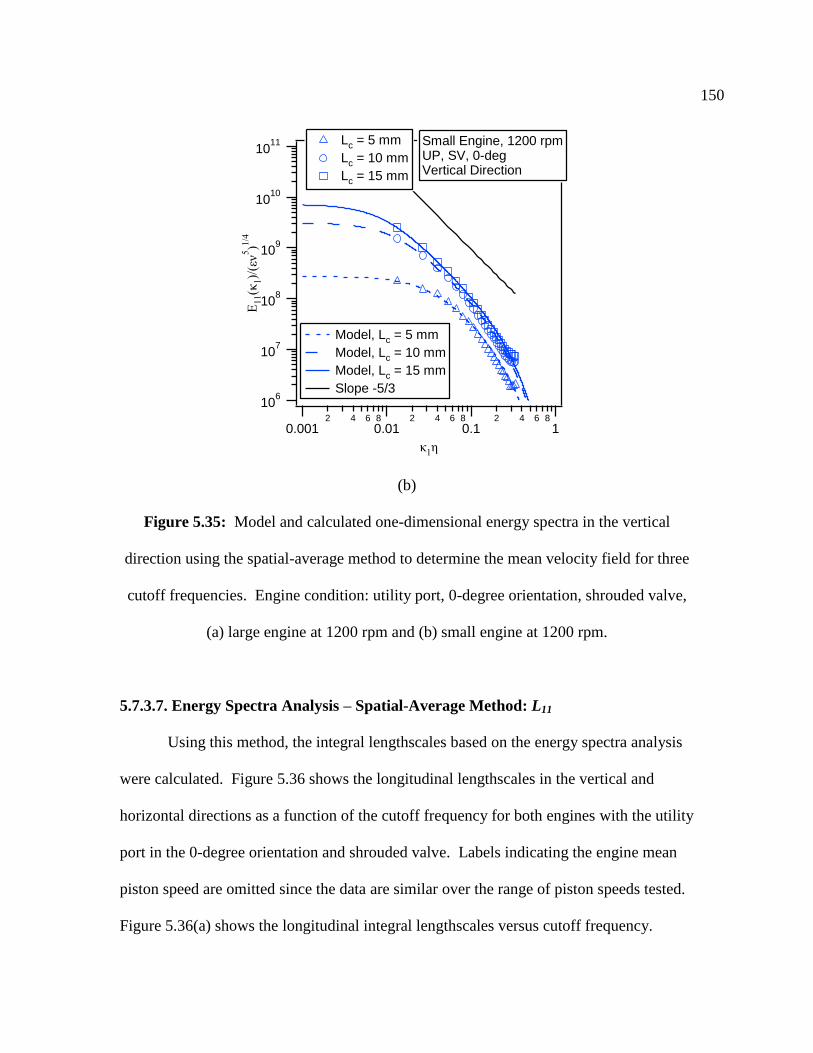
150
106
107
108
109
1010
1011
E11(κ
1)/
(εν
5)1
/4
0.0012 4 6 8
0.012 4 6 8
0.12 4 6 8
1
κ1η
Small Engine, 1200 rpmUP, SV, 0-degVertical Direction
Model, Lc = 5 mm
Model, Lc = 10 mm
Model, Lc = 15 mm
Slope -5/3
Lc = 5 mm
Lc = 10 mm
Lc = 15 mm
(b)
Figure 5.35: Model and calculated one-dimensional energy spectra in the vertical
direction using the spatial-average method to determine the mean velocity field for three
cutoff frequencies. Engine condition: utility port, 0-degree orientation, shrouded valve,
(a) large engine at 1200 rpm and (b) small engine at 1200 rpm.
5.7.3.7. Energy Spectra Analysis – Spatial-Average Method: L11
Using this method, the integral lengthscales based on the energy spectra analysis
were calculated. Figure 5.36 shows the longitudinal lengthscales in the vertical and
horizontal directions as a function of the cutoff frequency for both engines with the utility
port in the 0-degree orientation and shrouded valve. Labels indicating the engine mean
piston speed are omitted since the data are similar over the range of piston speeds tested.
Figure 5.36(a) shows the longitudinal integral lengthscales versus cutoff frequency.

151
Figure 5.36(b) shows the integral lengthscales made non-dimensional by the TDC
clearance, hTDC. Figure 5.36(c) shows the same data with the cutoff frequency made non-
dimensional by hTDC. This normalization appears to nearly collapse the data onto one
curve for both small and large engines. Again, at large Lc approaching the size of the
high-magnification FOV, the lengthscales tend to level off for the small engine. This is a
result of calculating the spatial-average velocity field with values of Lc greater than the
dimensions of the small engine high-magnification FOV. Due to this effect, the
remaining data will be shown only for Lc equal to or smaller than the image domain size
(8 mm for the small engine and 14 mm for the large engine).
2.5
2.0
1.5
1.0
0.5
0.0
L11 [m
m]
6 7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
UP, SV, 0-deg
Vertical
Horizontal
Open Symbol: Small EngineFilled Symbol: Large Engine
(a)

152
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
6 7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
UP, SV, 0-deg
Open Symbol: Small EngineFilled Symbol: Large Engine
Vertical
Horizontal
(b)
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
3 4 5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
Vertical
Horizontal
Open Symbol: Small EngineFilled Symbol: Large Engine
(c)
Figure 5.36: Longitudinal integral lengthscales in the horizontal and vertical directions
using the energy spectra analysis, spatial-average method. (a) L11 versus fc, (b) L11/hTDC

153
versus fc, and (c) L11/hTDC versus fc*hTDC. Engine condition: Utility port, shrouded valve,
0-degree orientation, all engine speeds.
The remaining engine conditions were analyzed in the same manner with both L11
and fc made non-dimensional by hTDC. The results are shown in Fig. 5.37. Again, there is
fairly close agreement between the small and large engines when the data are made non-
dimensional in this fashion. The longitudinal lengthscales in both the vertical and
horizontal directions give very similar results for a given engine condition. The one
exception to this appears to be the large engine with both ports and the shrouded valve,
where the horizontal direction gives slightly larger values than the vertical direction.
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
Vertical
Horizontal
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 0-deg
Vertical
Horizontal
(a) (b)

154
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 90-deg
Vertical
Horizontal
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, SV, 0-deg
Vertical
Horizontal
(c) (d)
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, NV, 0-deg
Vertical
Horizontal
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, NV, 90-deg
Vertical
Horizontal
(e) (f)
Figure 5.37: Longitudinal integral lengthscales in the horizontal and vertical directions
calculated using the energy spectra analysis, spatial-average method. Open symbols:
small engine, filled symbols: large engine. Engine conditions: Utility port, (a) SV, 0-
deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d) SV, 0-deg., (e) NV, 0-
deg., (f) NV, 90-deg.

155
This analysis gives lengthscales similar in magnitude to those found using the
correlation analysis in §5.7.2.3. To make a direct comparison of the longitudinal
lengthscales determined using the correlation coefficients and energy spectra analyses,
Fig. 5.38 shows data from two representative engine conditions. The figure includes data
from the utility port in the 0-degree orientation with (a)-(b) the shrouded valve and (c)-(d)
the non-shrouded valve in the horizontal and vertical directions. Comparing the two
methods, the lengthscales found using the energy spectra tend to vary less with fc, are
smaller in magnitude at small fc, and are roughly the same as those found with the
correlation data at a normalized cutoff frequency of about two.
2
3
4
56
0.1
2
3
4
56
1
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
Spectra
Correlation
Horizontal Direction
2
3
4
56
0.1
2
3
4
56
1
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
Spectra
Correlation
Vertical Direction
(a) (b)

156
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 0-deg
Spectra
Correlation
Horizontal Direction
0.4
0.3
0.2
0.1
0.0
L11 / h
TD
C
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 0-deg
Spectra
Correlation
Vertical Direction
(c) (d)
Figure 5.38: Comparison of longitudinal integral lengthscales calculated using the
energy spectra and correlation lengthscale analyses with the spatial-average data. Engine
conditions: Utility port, 0-deg., (a) SV, horizontal direction, (b) SV, vertical direction,
(c) NV, horizontal direction, (d) NV, vertical direction.
5.7.3.8. Energy Spectra Analysis – Spatial-Average Method: L11, High-
Magnification FOV Comparison
PIV data that were acquired in the high-magnification FOV and second high-
magnification FOV locations with both ports and shrouded valve in the large engine were
again analyzed to compare longitudinal integral lengthscales. Figure 5.39 shows the ratio
of L11 calculated in the high-magnification FOV to that calculated in the second high-
magnification FOV versus fc using the energy spectra analysis. The ratios are again close
to unity.

157
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
L11(H
.-M
. F
OV
) /
L11(S
eco
nd
H.-
M.
FO
V)
7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
Large Engine, UP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
Filled Symbol: VerticalOpen Symbol: Horizontal
(a)
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
L11(H
.-M
. F
OV
) /
L11(S
eco
nd
H.-
M.
FO
V)
7 8 9
0.12 3 4 5 6 7 8 9
1
fc [mm-1
]
Large Engine, PP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
Filled Symbol: VerticalOpen Symbol: Horizontal
(b)
Figure 5.39: Comparison of longitudinal integral lengthscales calculated in the two
high-magnification FOVs versus mean piston speed in the vertical and horizontal
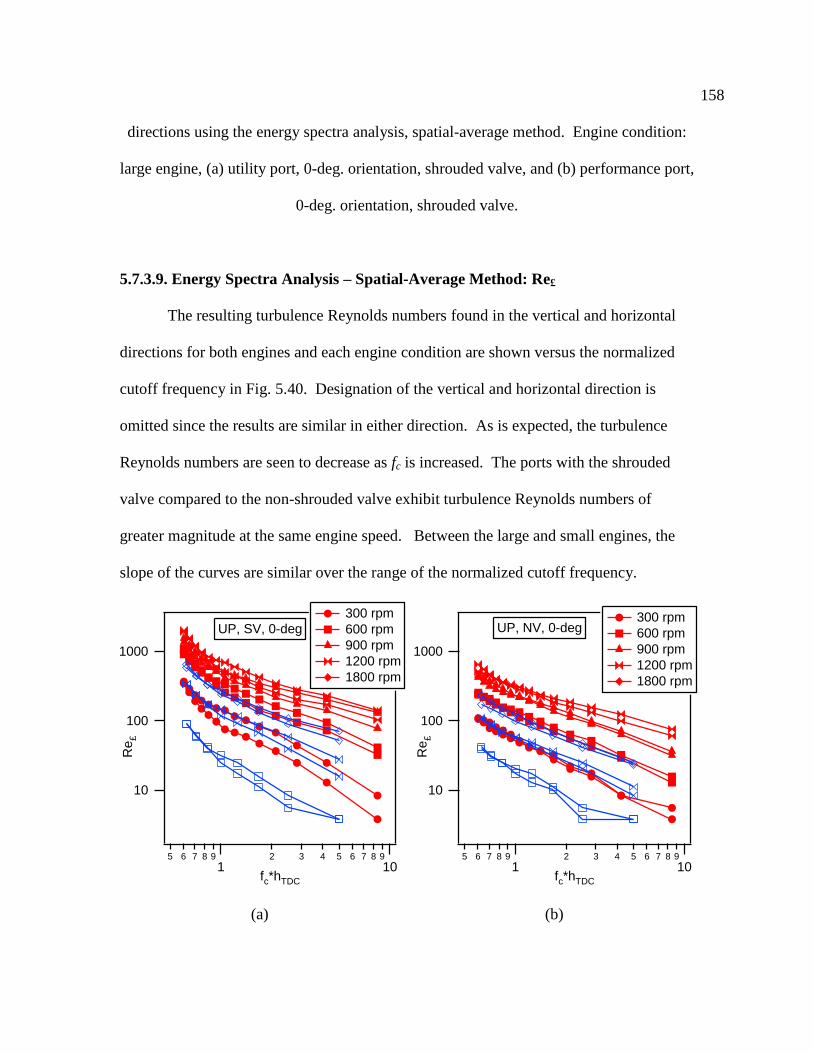
158
directions using the energy spectra analysis, spatial-average method. Engine condition:
large engine, (a) utility port, 0-deg. orientation, shrouded valve, and (b) performance port,
0-deg. orientation, shrouded valve.
5.7.3.9. Energy Spectra Analysis – Spatial-Average Method: Re£
The resulting turbulence Reynolds numbers found in the vertical and horizontal
directions for both engines and each engine condition are shown versus the normalized
cutoff frequency in Fig. 5.40. Designation of the vertical and horizontal direction is
omitted since the results are similar in either direction. As is expected, the turbulence
Reynolds numbers are seen to decrease as fc is increased. The ports with the shrouded
valve compared to the non-shrouded valve exhibit turbulence Reynolds numbers of
greater magnitude at the same engine speed. Between the large and small engines, the
slope of the curves are similar over the range of the normalized cutoff frequency.
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
UP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
UP, NV, 0-deg 300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(a) (b)

159
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
UP, NV, 90-deg 300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
PP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(c) (d)
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
PP, NV, 0-deg 300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
10
100
1000
Re
£
5 6 7 8 9
12 3 4 5 6 7 8 9
10fc*hTDC
PP, NV, 90-deg 300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(e) (f)
Figure 5.40: Turbulence Reynolds number versus normalized cutoff frequency in the
vertical and horizontal directions (not specified) using the energy spectra analysis,
spatial-average method. Open symbol: small engine, filled symbol: large engine. Engine
conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance
port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.

160
5.7.3.10. Energy Spectra Analysis – Spatial-Average Method: η
The resulting Kolmogorov lengthscales found in the vertical and horizontal
directions for both engines and each engine condition are shown versus the normalized
cutoff frequency in Fig. 5.41. Designation of the vertical and horizontal direction is
omitted since the results are similar in either direction. Examining the data, the
Kolmogorov lengthscales are seen to decrease with an increase in engine speed for a
given engine. This is because the turbulence Reynolds numbers increase with an increase
in engine speed. The ports with the shrouded valve compared to the non-shrouded valve
exhibit Kolmogorov lengthscales of smaller magnitude at the same engine speed, again
because the turbulence Reynolds numbers are greater for the ports with the shrouded
valve. Also, the Kolmogorov lengthscales are seen to increase as fc is increased, opposite
the trend of the turbulence Reynolds numbers.
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(a) (b)

161
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
UP, NV, 90-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, SV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(c) (d)
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, NV, 0-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
100
80
60
40
20
0
η [
μm
]
5 6 7 8 9
12 3 4 5 6 7 8 9
10
fc*hTDC
PP, NV, 90-deg
300 rpm
600 rpm
900 rpm
1200 rpm
1800 rpm
(e) (f)
Figure 5.41: Kolmogorov lengthscales versus normalized cutoff frequency in the
vertical and horizontal directions (not specified) using the energy spectra analysis,
spatial-average method. Open symbols: small engine, filled symbols: large engine.
Engine conditions: Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and
Performance port, (d) SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.

162
At smaller fc the Kolmogorov lengthscales do not change greatly in magnitude
with a change in fc. Therefore, it was thought interesting to plot the Kolmogorov
lengthscales versus mean piston speed for a given value of the normalized cutoff
frequency to compare with the ensemble average method data from §5.7.3.5. Figure 5.42
shows the Kolmogorov lengthscales versus mean piston speed for the ensemble-average
method and the spatial-average method with a normalized cutoff frequency value of 0.7.
Figure 5.43 again compares the Komogorov lengthscales for both methods but with a
normalized cutoff frequency of 1.7 for the spatial-average data. Examining the figures,
the trend with mean piston speed is similar between the ensemble- and spatial-average
methods. The Kolmogorov lengthscales decrease monotonically with engine speed for
all engine conditions. The ports with the shrouded valve compared to the non-shrouded
valve exhibit Kolmogorov lengthscales of smaller magnitude at the same mean piston
speed. Between the small and large engines, the Kolmogorov lengthscales are roughly
the same for a given mean piston speed. There is slightly more scatter in the data with
the normalized cutoff frequency of 1.7 compared to 0.7, but there is still fairly good
agreement between the two engines for a given mean piston speed.
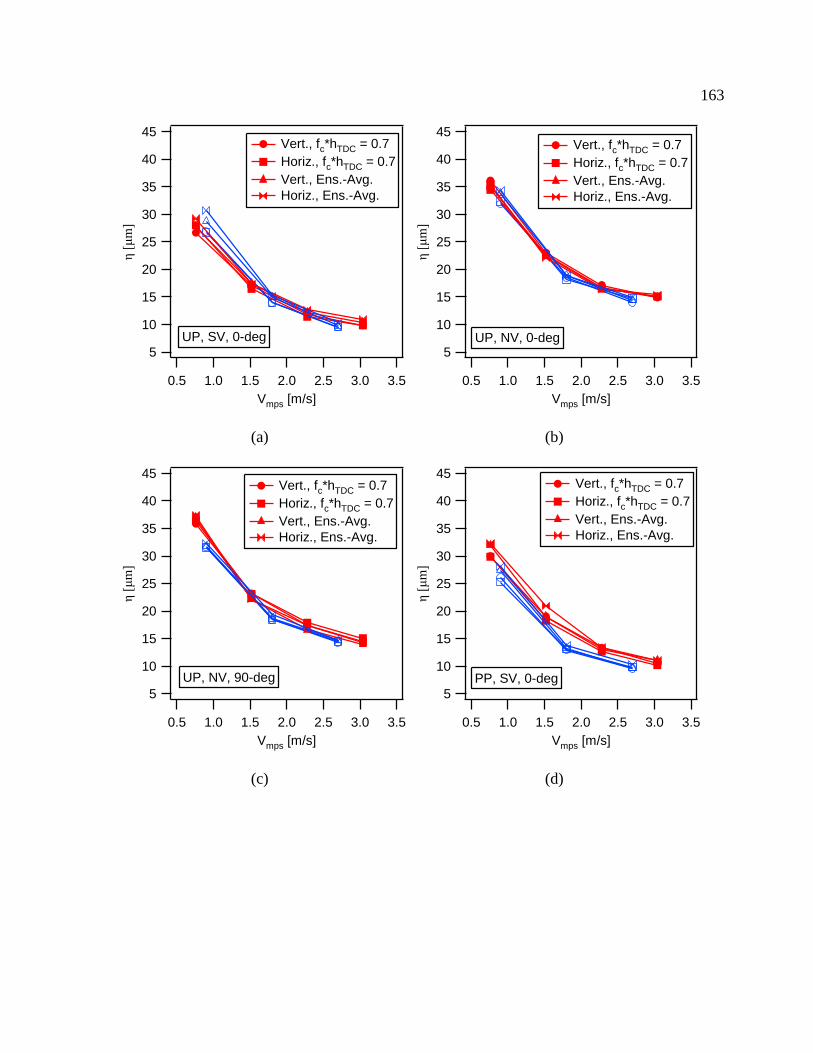
163
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, SV, 0-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 0-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(a) (b)
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 90-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(c) (d)

164
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 0-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 90-deg
Vert., fc*hTDC = 0.7
Horiz., fc*hTDC = 0.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(e) (f)
Figure 5.42: Kolmogorov lengthscales versus mean piston speed for fc*hTDC = 0.7 in the
vertical and horizontal directions using the energy spectra analysis, spatial-average
method. Open symbol: small engine, filled symbol: large engine. Engine conditions:
Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d)
SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.
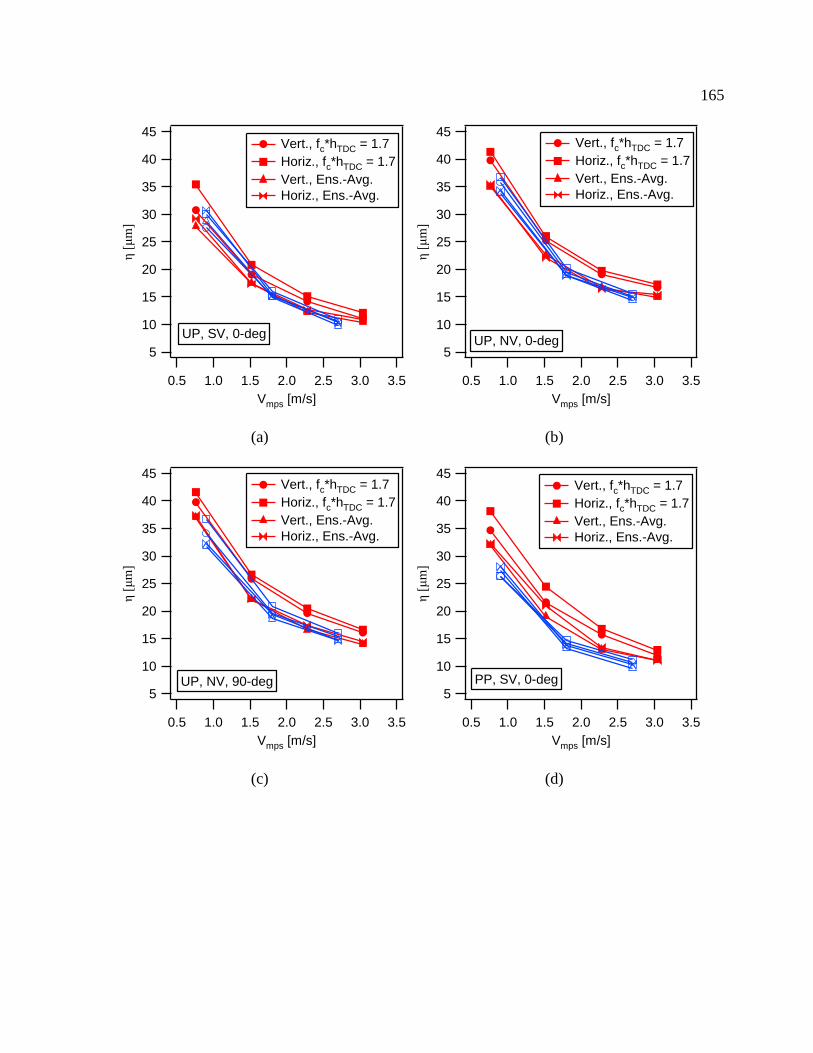
165
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, SV, 0-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 0-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(a) (b)
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
UP, NV, 90-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, SV, 0-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(c) (d)

166
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 0-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
45
40
35
30
25
20
15
10
5
η [
μm
]
3.53.02.52.01.51.00.5
Vmps [m/s]
PP, NV, 90-deg
Vert., fc*hTDC = 1.7
Horiz., fc*hTDC = 1.7
Vert., Ens.-Avg.
Horiz., Ens.-Avg.
(e) (f)
Figure 5.43: Kolmogorov lengthscales versus mean piston speed for fc*hTDC = 1.7 in the
vertical and horizontal directions using the energy spectra analysis, spatial-average
method. Open symbol: small engine, filled symbol: large engine. Engine conditions:
Utility port, (a) SV, 0-deg., (b) NV, 0-deg., (c) NV, 90-deg., and Performance port, (d)
SV, 0-deg., (e) NV, 0-deg., (f) NV, 90-deg.
5.8. Discussion
The turbulent flow field in the engine is inherently complicated because it is non-
stationary and susceptible to cyclic variations. This makes it difficult to unambiguously
define a mean velocity field about which to compile turbulence statistics. Because of the
spatial nature of the information available from PIV data, two methods were used to
define the mean velocity field. In the first, the ensemble average of a set of images was
performed to determine the mean velocity field. In the second, it is possible to define an

167
intra-cycle mean field based on a low-pass spatial filtering of the data akin to the
temporal filtering that was applied to cycle-resolved single-point velocity data from
HWA or LDV. This, however, introduces a bias associated with the choice of the cutoff
frequency. The approach that has been taken herein has been to characterize the results
as a function of the spatial cutoff frequency. This choice was made because the high-
magnification data have sufficient fidelity to allow a meaningful range of cutoff
frequency to be investigated.
It has long been understood that the large-scale flow field directly influences the
level of turbulence throughout the compression stroke of piston engines [5, 7, 16-18].
Studies have shown that there is a direct and nearly linear relationship between the in-
cylinder turbulence and the turbulent flame speed in spark-ignition engines [15, 48],
which directly impacts engine performance and emissions. It is, therefore, of great
importance to understand the bulk flow field and the resulting turbulence, and ultimately
their effect on the combustion process. Comparing the data from the ports with the
shrouded versus non-shrouded valves, the same large-scale flow field effect is apparent.
The ports with the shrouded valves produced higher levels of swirl as measured by the
steady flow bench tests and the PIV in-cylinder measurements during the compression
stroke. The engine conditions with higher swirl measured higher levels of turbulence
intensity.
Similar to previous studies, the turbulence intensity was found to be a linear
function of mean piston speed. Comparing the large and small engines for a given engine
condition, the turbulence intensity found using the ensemble average data (Fig. 5.12) was
nearly the same versus mean piston speed and the linear trend lines fit to the data also

168
indicated close similarity. The linear trend line data of the turbulence intensity found
using the spatial-average method also indicated close similarity when compared at the
same normalized cutoff frequency. Examining the shrouded valve linear trend data in
Fig. 5.14 at higher fc, there is a very slight difference between the small and large
engines. However, this difference is no more than that found examining Fig. 5.17 which
compares the two high-magnification FOVs in the large engine. As has been shown [36],
the flow field in an engine is nearly homogeneous, so it should be expected that a high
degree of similarity exists between the two high-magnification FOVs in the same engine.
That the magnitude of the difference in any of the data between the small and large
engines would be similar to the difference in the two high-magnification FOVs in the
large engine is encouraging and suggests dynamic similarity is achieved.
The integral lengthscale is an important parameter describing the flow field and in
the present study it has been calculated in two independent ways. First, two-point spatial
correlations were calculated from the data, and the longitudinal and transverse
lengthscales were found by direct integration of the correlations or through the use of a
best-fit equation. Secondly, the longitudinal integral length scale L11 was found by fitting
the experimental energy spectra to the model spectrum of Pope using the measured value
of k and employing Eqn. 5.18. Figure 5.44 shows the normalized L11 found using both
analyses and the ensemble-average definition of the mean flow. The two-point
correlation analysis gives L11 values roughly two to four times as large as the energy
spectra analysis. However, with the spatial-average method data (see Fig. 5.38), the
difference was dependent on the cutoff frequency. Figure 5.45 shows the normalized L11
found using both analyses and the spatial-average definition of the mean flow at a

169
normalized cutoff frequency of 1.7. Both analyses give lengthscales that are roughly
equal and there is good agreement in the data between the small and large engines.
1.0
0.8
0.6
0.4
0.2
0.0
L11 (S
pectr
a)
/ h
TD
C
1.00.80.60.40.20.0
L11 (Correlation) / hTDC
Vertical
Horizontal
One-to-One Line
Figure 5.44: Normalized longitudinal integral lengthscales found using the correlation
analysis versus energy spectra analysis for the ensemble average method data. All engine
conditions. Open symbols: small engine, filled symbols, large engine.
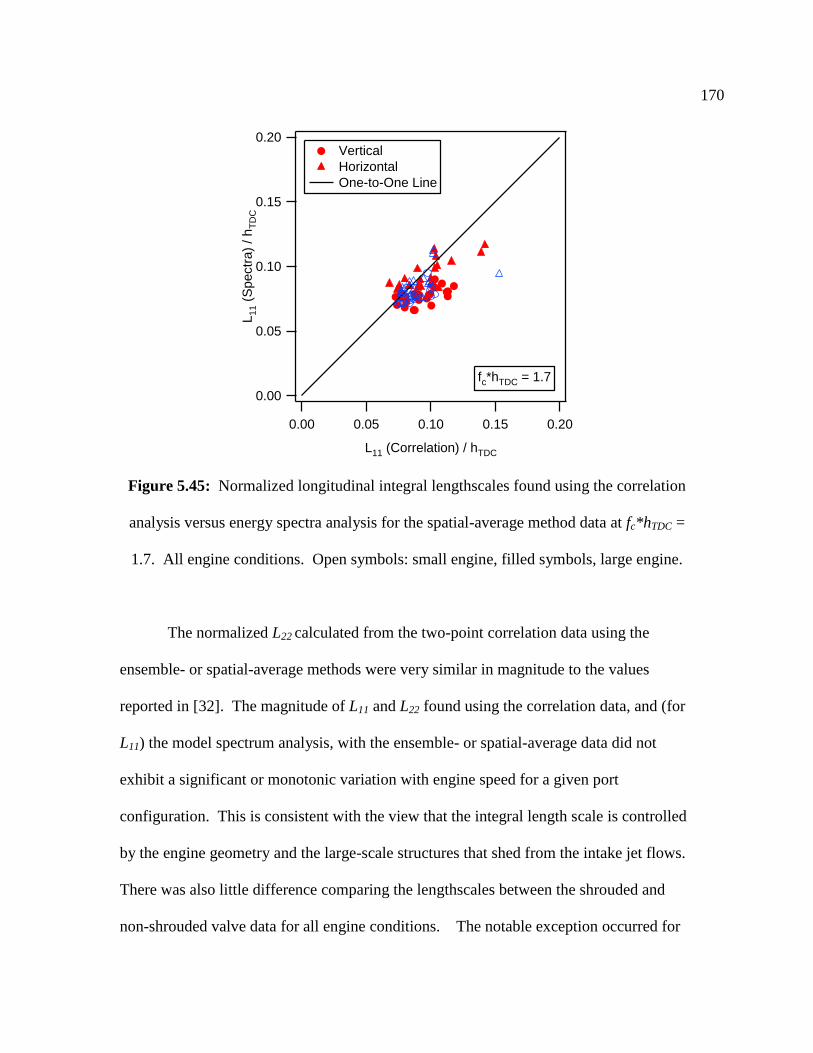
170
0.20
0.15
0.10
0.05
0.00
L11 (
Sp
ectr
a)
/ h
TD
C
0.200.150.100.050.00
L11 (Correlation) / hTDC
Vertical
Horizontal
One-to-One Line
fc*hTDC = 1.7
Figure 5.45: Normalized longitudinal integral lengthscales found using the correlation
analysis versus energy spectra analysis for the spatial-average method data at fc*hTDC =
1.7. All engine conditions. Open symbols: small engine, filled symbols, large engine.
The normalized L22 calculated from the two-point correlation data using the
ensemble- or spatial-average methods were very similar in magnitude to the values
reported in [32]. The magnitude of L11 and L22 found using the correlation data, and (for
L11) the model spectrum analysis, with the ensemble- or spatial-average data did not
exhibit a significant or monotonic variation with engine speed for a given port
configuration. This is consistent with the view that the integral length scale is controlled
by the engine geometry and the large-scale structures that shed from the intake jet flows.
There was also little difference comparing the lengthscales between the shrouded and
non-shrouded valve data for all engine conditions. The notable exception occurred for

171
L11 found using the spatial-average two-point correlation data at small fc. This is more a
result of using the best-fit curve in determining L11, since L22, which was found directly
from the correlation data, did not vary between shrouded and non-shrouded cases across
the range of fc. Comparing the large and small engine data, L11 and L22 were similar
when normalized by hTDC and when compared at the normalized cutoff frequency for the
spatial-average data, again an indication that the integral lengthscale is controlled by the
engine geometry.
The values of L11 and L22 were found to agree quite well in the horizontal and
vertical directions, indicating a high level of isotropy. Further, for the ensemble average
correlation-derived data, the ratio L22/L11 was close to the isotropic limit of 0.5, further
supporting the view that in this pancake chamber the TDC turbulence is nearly isotropic.
For the spatial-average correlation-derived data, the ratio L22/L11 was dependent on fc,
where for large fc the ratio tended toward unity, and for smaller fc tended to be close to
0.5, but this again was dependent on using the best-fit curve to determine L11.
The turbulence Reynolds numbers for each engine condition were calculated by
fitting the energy spectra to Pope‟s model spectrum. For both ensemble- and spatial-
averaging methods, for a given engine condition at the same mean piston speed, the small
engine exhibited smaller turbulence Reynolds numbers compared to the large engine.
Also, according to the model energy spectrum function, at very high Reynolds number
the ratio L11/ £ tends asymptotically to a value of 0.43 where the rate of energy
dissipation, ε, scales as k3/2
/L11. Figure 5.46(a) shows the ratio of L11/£ as a function of
the Taylor-scale Reynolds number, Rλ, from [60]. The Taylor-scale Reynolds number is
defined as
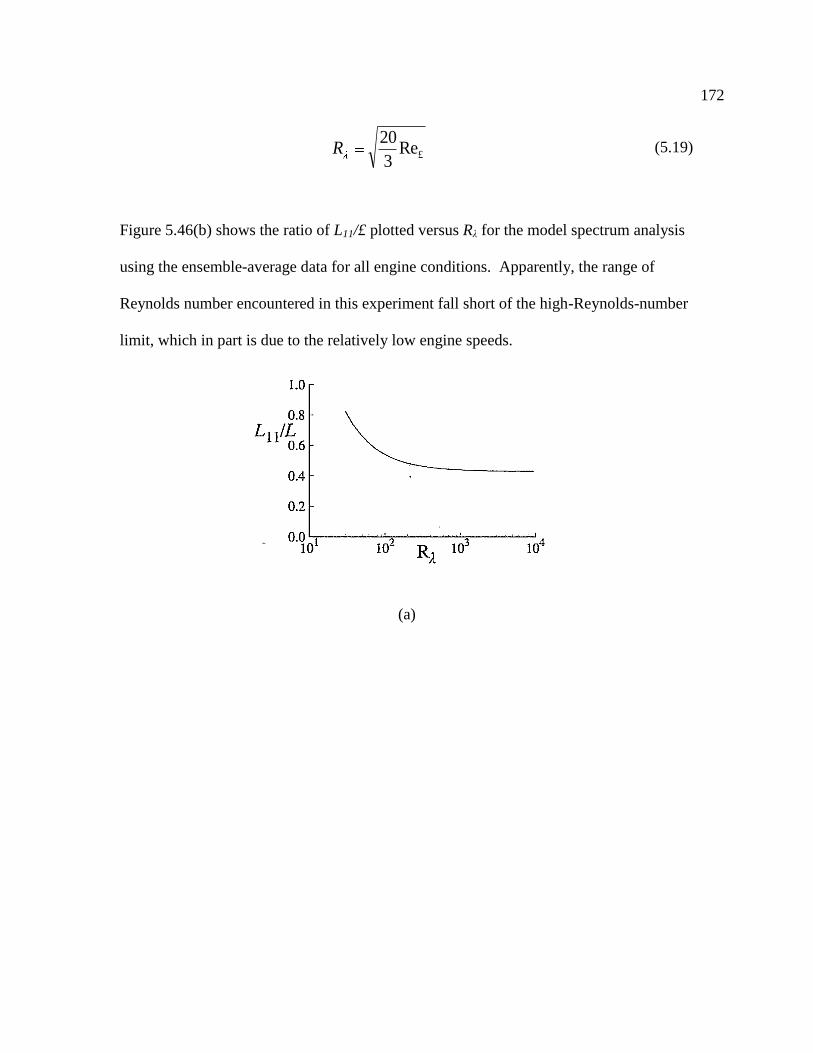
172
£Re3
20R (5.19)
Figure 5.46(b) shows the ratio of L11/£ plotted versus Rλ for the model spectrum analysis
using the ensemble-average data for all engine conditions. Apparently, the range of
Reynolds number encountered in this experiment fall short of the high-Reynolds-number
limit, which in part is due to the relatively low engine speeds.
(a)

173
1.0
0.8
0.6
0.4
0.2
0.0
L11/£
102 3 4 5 6
1002 3 4 5 6
1000
Rλ
Large Engine
Small Engine
High Rλ Asymptote
(b)
Figure 5.46: Ratio of L11/£ versus Rλ from (a) model spectrum [60] and (b) for all engine
conditions using model spectrum analysis with ensemble-average data.
To make a further comparison between the two-point correlation and energy
spectra analyses, a Reynolds number similar to Re£ (Eqn. 5.16) was calculated from L11
found using the correlation analysis with the ensemble average method data. This
Reynolds number, ReL11, is defined as
LRe 11
2/1
L11
k (5.20)
Figure 5.47 shows Re£ from the model spectrum versus ReL11 from the correlation
analysis for all engine conditions with the ensemble-average method data in both vertical
and horizontal directions. As is seen, ReL11 gives slightly larger values compared to Re£.
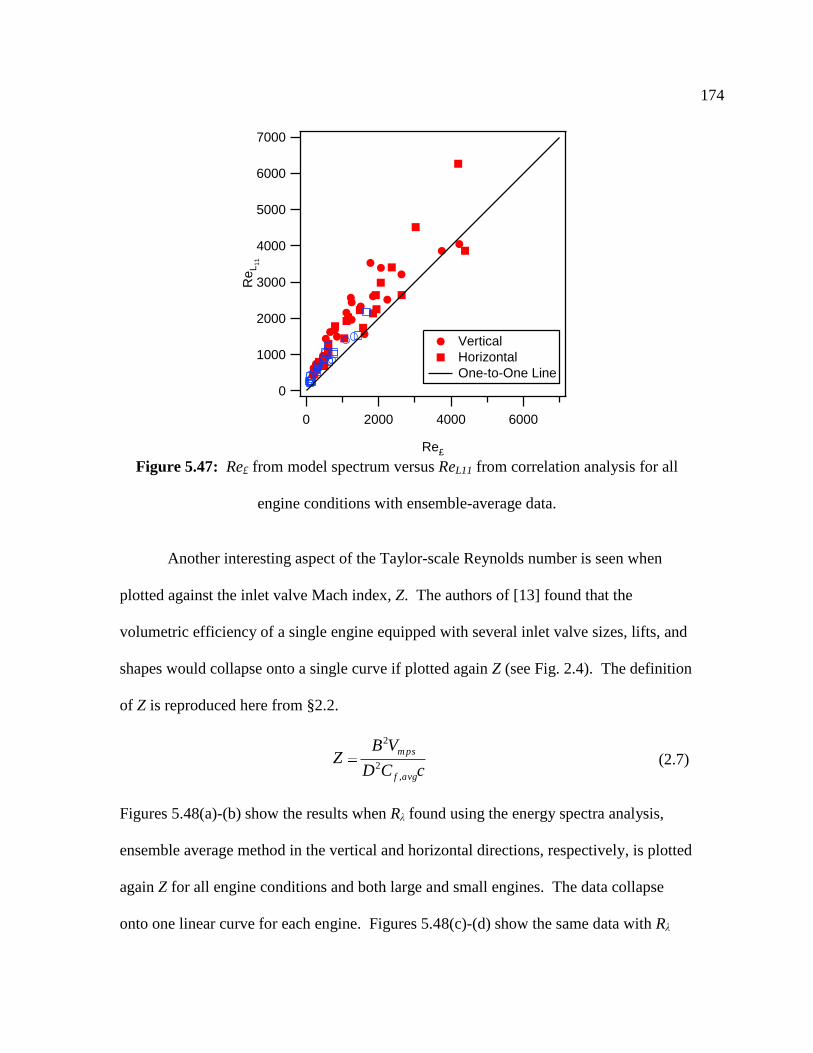
174
7000
6000
5000
4000
3000
2000
1000
0
Re
L1
1
6000400020000
Re£
Vertical
Horizontal
One-to-One Line
Figure 5.47: Re£ from model spectrum versus ReL11 from correlation analysis for all
engine conditions with ensemble-average data.
Another interesting aspect of the Taylor-scale Reynolds number is seen when
plotted against the inlet valve Mach index, Z. The authors of [13] found that the
volumetric efficiency of a single engine equipped with several inlet valve sizes, lifts, and
shapes would collapse onto a single curve if plotted again Z (see Fig. 2.4). The definition
of Z is reproduced here from §2.2.
cCD
VBZ
avgf
m ps
,2
2
(2.7)
Figures 5.48(a)-(b) show the results when Rλ found using the energy spectra analysis,
ensemble average method in the vertical and horizontal directions, respectively, is plotted
again Z for all engine conditions and both large and small engines. The data collapse
onto one linear curve for each engine. Figures 5.48(c)-(d) show the same data with Rλ

175
from the small engine conditions multiplied by the scaling factor, 1.69. This effectively
collapses the data from both engines onto a single curve. The implication of this is that
given an engine with a known Rλ versus Z curve, the curves for a whole family of similar
engines could be developed simply by determining Cf,avg for various intake port
geometries through steady flow bench testing. Of course, it is unclear how well this
relation would hold over a range of engine sizes and port types, given the limited number
of conditions used for this study.
180
160
140
120
100
80
60
40
20
Rλ
0.200.150.100.05
Z
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Ensemble Average MethodVertical Direction
(a)

176
180
160
140
120
100
80
60
40
20
Rλ
0.200.150.100.05
Z
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Ensemble Average MethodHorizontal Direction
(b)
180
160
140
120
100
80
60
40
20
Rλ(L
arg
e E
ngin
e),
Rλ(S
mall
Engin
e)*
1.6
9
0.200.150.100.05
Z
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Ensemble Average MethodVertical Direction
(c)

177
180
160
140
120
100
80
60
40
20
Rλ(L
arg
e E
ngin
e),
Rλ(S
mall
Engin
e)*
1.6
9
0.200.150.100.05
Z
PP, SV, 0-deg
PP, NV, 0-deg
PP, NV, 90-deg
UP, SV, 0-deg
UP, NV, 0-deg
UP, NV, 90-deg
Ensemble Average MethodHorizontal Direction
(d)
Figure 5.48: Rλ calculated using the energy spectra analysis, ensemble average method
versus Z. Open symbol: small engine, filled symbol: large engine. (a) Vertical direction,
(b) horizontal direction. Small engine Rλ multiplied by the scaling factor 1.69, (c)
vertical direction, (d) horizontal direction.
The Kolmogorov lengthscales for each engine condition were calculated by fitting
the energy spectra to Pope‟s model spectrum. Analyses using the ensemble average data
or spatial-average data and comparing results at fc*hTDC of 0.7 and 1.7 both led to similar
results. Comparing the shrouded versus non-shrouded valves cases for a given engine,
the shrouded valves gave smaller Kolmogorov lengthscales for a given mean piston speed
as the turbulence Reynolds numbers were larger and related to the Kolmogorov
lengthscales according to η = £ Re£ -3/4
. Comparing the small and large engines, for a

178
given engine condition and at the same mean piston speed the Kolmogorov lengthscales
are roughly equal. When the integral lengthscale, Komogorov lengthscale, and
turbulence Reynolds number are all considered at once, it points to an interesting
dynamic in the energy cascade. The large-scale turbulence or integral lengthscales are
determined by the geometry of the engine, and so they scale by the size of the engine. At
the same mean piston speed, the turbulence Reynolds numbers of the small engine
compared to the large engine decreases in such a way that the small-scale turbulence or
Kolmogorov lengthscales are similar. The flows created by the shrouded versus non-
shrouded valves indicate higher turbulence Reynolds numbers, effectively pushing the
Kolmogorov lengthscales farther down the energy cascade to smaller lengthscales.

179
CHAPTER 6
SUMMARY AND CONCLUSIONS
6.1. Conclusions
In-cylinder velocity measurements were acquired in two geometrically scaled,
two-valve, single-cylinder research engines to study the bulk fluid motion and small-scale
turbulence. Different port geometries (two), different port orientations (two) and both
shrouded and non-shrouded intake valves were tested to vary the intake-generated flow.
Tests were performed at engine speeds of 300, 600, 900 and 1200 RPM for large engine
and 600, 1200, and 1800 RPM for the small engine with an atmospheric intake pressure.
Prior to testing on the engines, the different head configurations were tested on a steady
flow bench to quantify the similarity and magnitude of flow and swirl coefficients, and
the swirl ratios between the engines.
Low-magnification PIV data were used to characterize the bulk flow in the
cylinder of the two engines. The mean location of the swirl center and the mean angular
velocity were determined by fitting a solid-body profile to the flow. For a given engine
configuration, the swirl center locations were found to be relatively insensitive to engine
speed at a fixed crank angle time, but were found to precess about the chamber at
different crank angles in the cycle. Between the two engines, the swirl center locations,
scaled by the cylinder radii, were grouped in the same location in the cylinder at the same
crank angle time. At TDC, the swirl centers for all port configurations were found to be
located nearest to the cylinder axis. Dividing the angular velocity for a given port
configuration by the engine rotation rate was found to collapse the data from the multiple
engine speeds nearly onto a single curve; the curve did however vary from condition to

180
condition based on the steady-state swirl ratio of a configuration. The angular velocity
was largely found to decrease with crank angle due to wall friction. On average, for all
port configurations, the small engine produced a slightly lower normalized angular
velocity at TDC compared to the large engine. The angular rotation rate from the solid-
body fit was found to be in good agreement with the steady-state swirl ratio for high-
swirl conditions. At low-swirl conditions the in-cylinder angular velocity was found to
significantly exceed the steady-state value of swirl ratio.
High-magnification PIV data were used to characterize the turbulent statistics of
the flow using both an ensemble- and spatial-average method of defining the mean
velocity field. The turbulence intensity, calculated using either method, showed a high
degree of linearity with mean piston speed. The turbulence intensity versus mean piston
speed calculated using the ensemble average method showed fairly good agreement
between the small and large engines in both magnitude and linear slope. The turbulence
intensity calculated using the spatial-average method, over a range of cutoff frequencies,
was found to monotonically decrease with cutoff frequency. Again, there was good
agreement in the linear slopes for all port configurations between the small and large
engines over the range of cutoff frequencies when fc was normalized by hTDC.
Two-point correlations of the fluctuating velocity components were calculated to
determine 8 of the 27 possible integral length scales. The cross-velocity correlations 12
and 21 were close to zero for all separation distances as expected. The correlations
calculated in the single- and double-sided manner agreed well. The transverse correlation
data converged to zero at large separation distance for most cases, and allowed an
estimate of L22 by direct integration for all cases in the ensemble- and spatial-average

181
methods, but the longitudinal correlation data did not always fully converge to zero and,
thus, calculation of the longitudinal integral lengthscale required the extension of the data
using a best-fit function. When L11 and L22 found using the ensemble average method
data was normalized by hTDC, values were similar to those reported in [32, 35] whose
analysis was also based on the ensemble average method. Both the ensemble- and
spatial-average correlation data provided integral lengthscales that did not vary much
with engine speed. There was good agreement between the large and small engines when
the ensemble- and spatial-average correlation lengthscales were normalized by the TDC
clearance and when compared at the same normalized cutoff frequency for the spatial-
average method. To the author‟s knowledge, this is the first study to demonstrate how
the lengthscales scale by the scaling factor of the engines. There was close agreement in
the horizontal and vertical directions, indicating a high degree of isotropy in the flow
field. Further, the ratio L22/L11 on average for the ensemble-average correlation data was
found to be close to the isotropic limit of 0.5, although there was some scatter in the data.
Turbulent kinetic energy spectra found using the ensemble-average method were
presented. The spectra were found to be fit well by Pope's model spectrum, except at
higher wavenumbers where one would expect a discrepancy due to the limited spatial
resolution of the measurement. The higher engine speed data showed a pronounced
inertial range where the spectra were seen to acquire the traditional -5/3 wavenumber
power law dependence. However, at the lowest engine speeds, there was not a clearly
defined inertial range, suggesting that the turbulence is not fully developed and the
separation of large, energy-containing scales and the small scales at which viscosity
dominates is not complete. A similar effect was observed when the spatial-average

182
method was used with a high fc, and this may represent a practical limit to the choice of fc
in cycle-resolved analyses.
The fitting of the model spectrum to the data resulted in an estimate of £ and Re£,
and from these results the Kolmogorov scale and L11 can also be estimated. The
turbulence Reynolds number determined in the spectral fit was found to increase with
increasing engine speed whereas the longitudinal integral lengthscale, L11, was found to
be nearly constant with speed. There was also little difference in L11 when compared
between cases with the shrouded valve versus non-shrouded valve. Again, there was
good agreement between the large and small engines when the spectrally derived L11
found using the ensemble- and spatial-average methods were normalized by the TDC
clearance and when compared at the same normalized cutoff frequency for the spatial-
average method. The L11 estimates from the energy spectra fitting were found to be
approximately 2.5 smaller than the values determined from the two-point correlations
for the ensemble average data, but the difference varied over the range of cutoff
frequency between the two analyses for the spatial-average data. The Kolmogorov scale
decreased with increasing engine speed. The Kolmogorov scale was seen to be smaller in
magnitude for the shrouded valve versus non-shrouded valve at similar engine conditions.
When compared between the large and small engines at the same mean piston speed, the
Kolmogorov scale was nearly the same.
Using the energy spectra analysis and ensemble average data, the Taylor-scale
Reynolds number, Rλ, was defined and shown versus the inlet valve Mach index, Z, for
all engine conditions. When the Rλ found for the small engine conditions were multiplied
by the scaling factor, the data for both small and large engines collapsed onto a single

183
curve. It would be interesting if this relation held for a wider range of intake port
configurations, as this could be a good predictive tool.
6.2. Future Work
Future work for this study will include PLIF experiments to measurements in-
cylinder mixing. One of the advantages of PLIF over PIV measurements is increased
spatial resolution, where it has been shown [45] that spatial resolution down to a
lengthscale of ~30μm is possible. This resolution allows for more accuracy when
calculating statistics of the mixing. Energy spectra can be calculated and compared with
those from the PIV data. Experiments where the engines are skip-fired are planned.
These will expand upon the work done by Taylor [11] to include multiple port
configurations. The ability to relate the combustion details back to the PIV and PLIF
measurements wil help to detail more fully the physics of size-scaling in engines.

184
REFERENCES
[1] Purday, H.F.P.: Diesel Engine Design, D. Van Nostrand Co., New York, 1919.
[2] Lichty, L.C.: Internal Combustion Engines, 5th
ed., McGraw-Hill, New York, 1939.
[3] Witze, P.O.: “Measurements of the Spatial Distribution and Engine Speed
Dependence of Turbulent Air Motion in an I.C. Engine,” SAE paper 770220, SAE Trans,
v. 86, 1977.
[4] Rask, R.B.: “Laser Doppler Anemometer Measurements in an Internal Combustion
Engine,” SAE paper 790094, SAE Trans, v. 88, 1979.
[5] Liou, T.-M., and Santavicca, D.A.: “Cycle Resolved Turbulence Measurements in a
Ported Engine With and Without Swirl,” SAE paper 830419, SAE Trans, v. 92, 1983.
[6] Witze, P.O., Martin, J.K., and Borgnakke, C.: “Measurements and Predictions of the
Precombustion Fluid Motion and Combustion Rates in a Spark Ignition Engine,” SAE
paper 831697, SAE trans, v. 92, 1983.
[7] Liou, T.-M., Hall, M., Santavicca, D.A., and Bracco, F. V.: “Laser Doppler
Velocimetry Measurements in Valved and Ported Engines,” SAE paper 840375, SAE
Trans, v. 93, 1984.
[8] Hayder, M.E., Varma, A.K., and Bracco, F.V.: “A Limit to TDC Turbulence Intensity
in Internal Combustion Engines,” J. Propulsion and Power, v. 1, iss. 4, 1985.
[9] Bopp, S., Vafidis, C., and Whitelaw, J.H.: The Effect of Engine Speed on the TDC
Flowfield in a Motored Reciprocating Engine,” SAE paper 860023, SAE Trans, v. 95,
1986.
[10] Hall, M.J., and Bracco, F.V.: “A Study of Velocities and Turbulence Intensities
Measured in Firing and Motored Engines,” SAE paper 870453, SAE Trans, v. 96, 1987.
[11] Taylor, C.F.: “Effect of Size on the Design and Performance of Internal-Combustion
Engines,” Trans ASME, July, 1950.
[12] Taylor, C.F.: The Internal Combustion Engine in Theory and Practice, 2nd
Ed., MIT
Press, Cambridge, Massachusetts, 1966.
[13] Livengood, J.C., and Stanitz, J.B.: “The Effect of Inlet-Valve Design, Size, and Lift
on the Air Capacity and Output of a Four-Stroke Engine,” NACA Tech. Notes, no. 915,
1943.

185
[14] Lancaster, D.R., Krieger, R.B., Sorenson, S.C., and Hull, W.L.: “Effects of
Turbulence on Spark-Ignition Engine Combustion,” SAE paper 760160, SAE Trans, v.
85, 1976.
[15] Groff, E.G. and Matekunas, F.A.: “The Nature of Turbulent Flame Propagation in a
Homogeneous Spark-Ignited Engine,” SAE paper 800133, SAE Trans, v. 89, 1980.
[16] Dimopoulos, P. and Boulouchos, K.: “Turbulent Flow Field Characteristics in a
Motored Reciprocating Engine,” SAE paper 972833, SAE Trans, v. 106, 1997.
[17] Ikegami M., Shioji M., and Nishimoto K.: “Turbulence Intensity and Spatial Integral
Length Scale During Compression and Expansion Strokes in a Four Cycle Reciprocating
Engine,” SAE paper 870372, SAE Trans, v. 96, 1987.
[18] Hall, M.J., and Bracco, F.V.: “A Study of Velocities and Turbulence Intensities
Measured in Firing and Motored Engines,” SAE paper 870453, SAE Trans, v. 96, 1987.
[19] Winsor, R.E. and Patterson, D.J.: “Mixture Turbulence – A Key to Cyclic
Combustion Variation,” SAE paper 730086, SAE Trans, v. 82, 1973.
[20] Dimopoulos, P. and Boulouchos, K.: “Turbulence Parameters in a Motored Engine:
Influence of Intake Flow, Measurement Location and Engine Speed,” IEA TLM 93,
Baden, Germany, 1993.
[21] Dimopoulos, P., Schneider, B., and Boulouchos, K.: “Turbulent Flow Field in a
Motored Engine, Analysis of Coincident 3-D LDV Measurements,” IEA TLM 94,
Heidelberg, Germany, 1994.
[22] Corcione, F.E. and Valentino, G.: “Analysis of In-Cylinder Turbulent Air Motion
Dependence on Engine Speed,” SAE paper 940284, 1994.
[23] Dimopoulos, P. and Boulouchos, K.: “Reynolds Stress Components in the Flow
Field of a Motored Reciprocating Engine,” SAE paper 950725, 1995.
[24] Kang, K.Y. and Baek, J.H.: “Tumble Flow and Turbulence Characteristics in a
Small Four-Valve Engine,” SAE paper 960265, 1996.
[25] Dimopoulos, P. and Boulouchos, K.: “Turbulent Flow Field Characteristics in a
Motored Reciprocating Engine,” SAE paper 972833, SAE Trans, v. 106, 1997.
[26] Alger, T., McGee, J., Gallant, E., and Wooldridge, S.: “PIV In-Cylinder Flow
Measurements of Swirl and the Effect of Combustion Chamber Design,” SAE paper
2004-01-1952, 2004.

186
[27] Liou, T., and Santavicca, D.: “Cycle Resolved LDV Measurements in a Motored IC
Engine,” J. Fluids Engineering, v. 107, pp. 232-240, 1985.
[28] Dent, J. and Salama, N.: “The Measurement of Turbulence Characteristics in an
Internal Combustion Engine Cylinder,” SAE paper 750886, 1975.
[29] Lancaster, D.: “Effects of Engine Variables on Turbulence in a Spark-Ignition
Engine,” SAE paper 760159, 1976.
[30] Wakuri, Y., Kido, H., Murase, E., and Wang, Z.: “Variations of Turbulence Scales
in an Engine Cylinder and a Fine Structure Model of Isotropic Turbulence,” Memoirs of
the Faculty of Engineering, Kyushu Univ., v. 43, pp. 179-191, 1983.
[31] Ikegami, M., Shioji, M., Wei, D., and Sugiura, M.: “In-Cylinder Measurement of
Turbulence by Laser Homodyne Principle,” COMODIA 85 Symposium, Tokyo, pp. 115-
123, 1985.
[32] Fraser, R., Felton, P., Bracco, F., and Santavicca, D.: “Preliminary Turbulence
Length Scale Measurements in a Motored IC Engine,” SAE paper 860021, 1986.
[33] Fraser, R. and Bracco, F.: “Cycle-Resolved LDV Integral Length Scale
Measurements in an I.C. Engine,” SAE Paper 880381, 1988.
[34] Hong, C. and Tarng, S.: “Direct Measurement and Computational Analysis of
Turbulence Length Scales of a Motored Engine,” Experimental Thermal and Fluid
Science, v. 16, pp. 277-285, 1997.
[35] Funk, C., Sick, V., Reuss, D., and Dahm, W.: “Turbulence Properties of High and
Low Swirl In-Cylinder Flows,” SAE paper 2002-01-2841, 2002.
[36] Fraser, R. and Bracco, F.: “Cycle-Resolved LDV Integral Length Scale
Measurements Investigating Clearance Height Scaling, Isotropy, and Homogeneity in an
I.C. Engine,” SAE Paper 890615, 1989.
[37] Li, Y., Zhao, H., Peng, Z., and Ladommatos, N.: “Particle Image Velocimetry
Measurement of In-Cylinder Flow in Internal Combustion Engines – Experiment and
Flow Structure Analysis,” Proc Instn Mech Engrs, v. 216, part D, pp. 65-81, 2002.
[38] Li, Y., Zhao, H., and Ladommatos, N.: “Analysis of Large-Scale Flow
Characteristics in a Four-Valve Spark Ignition Engine,” J. Mechanical Engineering
Science, v. 216, pt. C, 2002.
[39] Reuss, D., Adrian, R., Landreth, C., French, D., and Fansler, T.: “Instantaneous
Planar Measurements of Velocity and Large-Scale Vorticity and Strain Rate in an Engine
Using Particle Image Velocimetry,” SAE Paper 890616, 1989.

187
[40] Ghandhi, J., Herold, R., Shakal, J., and Strand, T.: “Time Resolved Particle Image
Velocimetry Measurements in an Internal Combustion Engine,” SAE Paper 2005-01-
3868, 2005.
[41] Fajardo, C., and Sick, V.: “Kinetic Energy and Dissipation Rate Spectra of High-
and Low-Swirl Internal Combustion Engine Flows,” SAE Paper 2009-01-0651, 2009.
[42] Nordgren, H., Hildingsson, L, Johansson, B., Dahlen, L., and Konstanzer, D.:
“Comparison Between In-Cylinder PIV Measurements, CFD Simulations and Steady-
Flow Impulse Torque Swirl Meter Measurements,” SAE Paper 2003-01-3147, 2003.
[43] Zhang, L., Takahiro, U., Toshiaki, T., and Katsuhiko, Y.: “A Study of the Cycle-to-
Cycle Variation of In-Cylinder Flow in a Motored Engine Through Digital Image
Processing of Visualized Images,” SAE paper 950727, 1995.
[44] Bottom, K.: “PIV Measurements of In-Cylinder Flow and Correlation with Engine
Performance,” Ph.D. Thesis, University of Wisconsin – Madison, 2003.
[45] Petersen, B., Heim, D., and Ghandhi, J.: “High Resolution Scalar and Velocity
Measurements in an I.C. Engine,” J. Engineering for Gas Turbines and Power, v. 132, is.
9, 2010.
[46] Kaiser, S. and Frank, J.: “Imaging of dissipative structures in the near field of a
turbulent non-premixed jet flame,” Proc. Comb. Inst., v. 31, is. 1, pp. 1515-1523, 2007.
[47] Daneshyar, H., and Hill, P.: “The Structure of Small-Scale Turbulence and Its Effect
on Combustion in Spark-Ignition Engines,” Prog. Energy Combust. Sci., 13:47-73, 1987.
[48] Heywood, J.B.: Internal Combustion Engine Fundamentals, McGraw-Hill Cos.,
New York, 1988.
[49] Hill, P.G., and Zhang, D.: “The Effects of Swirl and Tumble on Combustion in
Spark-Ignition Engines,” Prog. Energy Combust. Sci., v. 20, pp. 373-429, (see p. 416),
1994.
[50] Son, J., Lee, S., Han, B., and Kim, W.: “A Correlation Between Re-defined Design
Parameters and Flow Coefficients of SI Engine Intake Ports,” SAE paper 2004-01-0998,
SAE Trans, v. 113, 2004.
[51] Puntambekar, A.: “Combustion and Spray Visualization in a High-Speed Direct
Injected Engine,” M.S. Thesis, University of Wisconsin – Madison, 2009.
[52] Melling, A.: “Tracer Particles and Seeding for Particle Image Velocimetry,”
Measurement Science and Technology, v. 8, pp. 1406-1416, 1997.

188
[53] Keane, R., and Adrian, R.: “Optimization of Particle Image Velocimeters. Part I:
Double Pulsed Systems,” Meas. Sci. Technol., v. 1, n. 11, pp. 1202-1215, 1990.
[54] Taylor, B. and Kuyatt, C.: “Guidelines for Evaluating and Expressing the
Uncertainty of NIST Measurement Results,” National Institute of Standards and
Technology Technical Note 1297, 1994.
[55] Stone, C., and Ladommatos, N.: “The Measurement and Analysis of Swirl in Steady
Flow,” SAE paper 921642, SAE Trans, v. 101, 1992.
[56] Heim, D. and Ghandhi, J.: “Investigation of Swirl Meter Performance,” (Submitted
to J. Automobile Engineering), 2011.
[57] Tanabe, S., Iwata, H., and Kashiwada, Y., “On Characteristics of Impulse Swirl
Meter,” Transactions of the Japan Society of Mechanical Engineers, Series B, pp. 1054-
1060, 1994.
[58] Tindal, M. and Williams, T., “An Investigation of Cylinder Gas Motion in the Direct
Injection Diesel Engine,” SAE paper 770405, 1977.
[59] Snauwaert, P. and Sierens, R., “Experimental Study of the Swirl Motion in Direct
Injection Diesel Engines Under Steady State Flow Conditions (by LDA),” SAE paper
860026, 1986.
[60] Pope, S.: Turbulent Flows, Cambridge University Press, Cambridge, UK, 2000.

189
APPENDIX A: VALVE LIFT PROFILE
This appendix contains the non-dimensional valve lift profile, as set forth in
Chapter 3.
Crank
Angle L/D
Crank
Angle L/D
Crank
Angle L/D
Crank
Angle L/D
Crank
Angle L/D
105 0.248 139 0.221814 173 0.144412 207 0.046234 241 0.010003
106 0.247977 140 0.220251 174 0.141474 208 0.044037 242 0.0096
107 0.247909 141 0.218643 175 0.13851 209 0.041916 243 0.0092
108 0.247796 142 0.21699 176 0.135523 210 0.039873 244 0.008799
109 0.247638 143 0.215292 177 0.132514 211 0.037909 245 0.008399
110 0.247434 144 0.213549 178 0.129486 212 0.036026 246 0.007999
111 0.247184 145 0.211761 179 0.12644 213 0.034224 247 0.0076
112 0.24689 146 0.209928 180 0.123379 214 0.032504 248 0.0072
113 0.24655 147 0.20805 181 0.120305 215 0.030866 249 0.0068
114 0.246165 148 0.206128 182 0.117221 216 0.029311 250 0.0064
115 0.245735 149 0.20416 183 0.11413 217 0.027836 251 0.006
116 0.245259 150 0.202148 184 0.111035 218 0.026442 252 0.0056
117 0.244738 151 0.200092 185 0.107938 219 0.025128 253 0.0052
118 0.244172 152 0.197992 186 0.104842 220 0.02389 254 0.0048
119 0.24356 153 0.195848 187 0.101751 221 0.022728 255 0.0044
120 0.242903 154 0.19366 188 0.098667 222 0.021639 256 0.004
121 0.242201 155 0.191428 189 0.095595 223 0.020621 257 0.0036
122 0.241453 156 0.189154 190 0.092537 224 0.019669 258 0.0032
123 0.24066 157 0.186836 191 0.089498 225 0.018782 259 0.0028
124 0.239822 158 0.184476 192 0.08648 226 0.017955 260 0.0024
125 0.238939 159 0.182074 193 0.083487 227 0.017184 261 0.002
126 0.23801 160 0.17963 194 0.080522 228 0.016466 262 0.0016
127 0.237036 161 0.177146 195 0.077591 229 0.015796 263 0.001225
128 0.236016 162 0.17462 196 0.074695 230 0.01517 264 0.0009
129 0.234952 163 0.172055 197 0.07184 231 0.014584 265 0.000625
130 0.233842 164 0.169451 198 0.069027 232 0.014033 266 0.0004
131 0.232686 165 0.166809 199 0.066262 233 0.013513 267 0.000225
132 0.231486 166 0.164129 200 0.063547 234 0.013019 268 0.0001
133 0.23024 167 0.161413 201 0.060887 235 0.012549 269 0.000025
134 0.228949 168 0.158661 202 0.058283 236 0.012097 270 0
135 0.227612 169 0.155875 203 0.05574 237 0.01166
136 0.22623 170 0.153055 204 0.053261 238 0.011234
137 0.224803 171 0.150204 205 0.050849 239 0.010818
138 0.223331 172 0.147322 206 0.048506 240 0.010408
Table A.1: Intake non-dimensional valve lift profile between 105 and 270 crank angle
degrees. The intake and exhaust profiles are identical and symmetric about the peak lift,

190
such that the exhaust profile can easily be deduced from this table, the valve inner seat
diameter, and the peak lift locations found in Table 3.3.

191
APPENDIX B: INTAKE PORT DRAWINGS
This appendix contains the engineering drawings of the intake ports, as set forth
in Chapter 3. Note: the drawings are in the non-standard first projection view, the default
setting in SolidWorks, as opposed to the standard third projection view.
Figure B.1: Large engine performance intake port engineering drawing.

192
Figure B.2: Side close-up view detailing flow path of large engine performance intake
port.

193
Figure B.3: Large engine utility intake port engineering drawing.

194
Figure B.4: Side close-up view detailing flow path of large engine utility intake port.

195
Figure B.5: Back close-up view detailing flow path of large engine utility intake port.

196
APPENDIX C: FLOW COEFFICIENTS AND UNCERTAINTY ANALYSIS
This appendix contains the flow coefficient data of the small and large heads, as
set forth in Chapter 4.
C.1. Flow Coefficients
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
PP, 0-deg., NV Large Head
Small Head
Large Head, Cf,avg
= 0.481
Small Head, Cf,avg
= 0.502
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
Large Head, Cf,avg
= 0.499
Small Head, Cf,avg = 0.481
PP, 90-deg., NV Large Head Small Head
(a) (b)

197
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
PP, 0-deg., SV Large Head Small Head
Large Head, Cf,avg = 0.303
Small Head, Cf,avg = 0.299
(c)
Figure C.1: Flow coefficients versus crank angle degrees of performance port with non-
shrouded valve in the (a) 0- and (b) 90-degree orientations and (c) shrouded valve in 0-
degree orientation.
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
UP, 0-deg., NV Large Head Small Head
Large Head, Cf,avg
= 0.446
Small Head, Cf,avg
= 0.462
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
Large Head, Cf,avg
= 0.430
Small Head, Cf,avg
= 0.434
UP, 90-deg., NV Large Head Small Head
(a) (b)
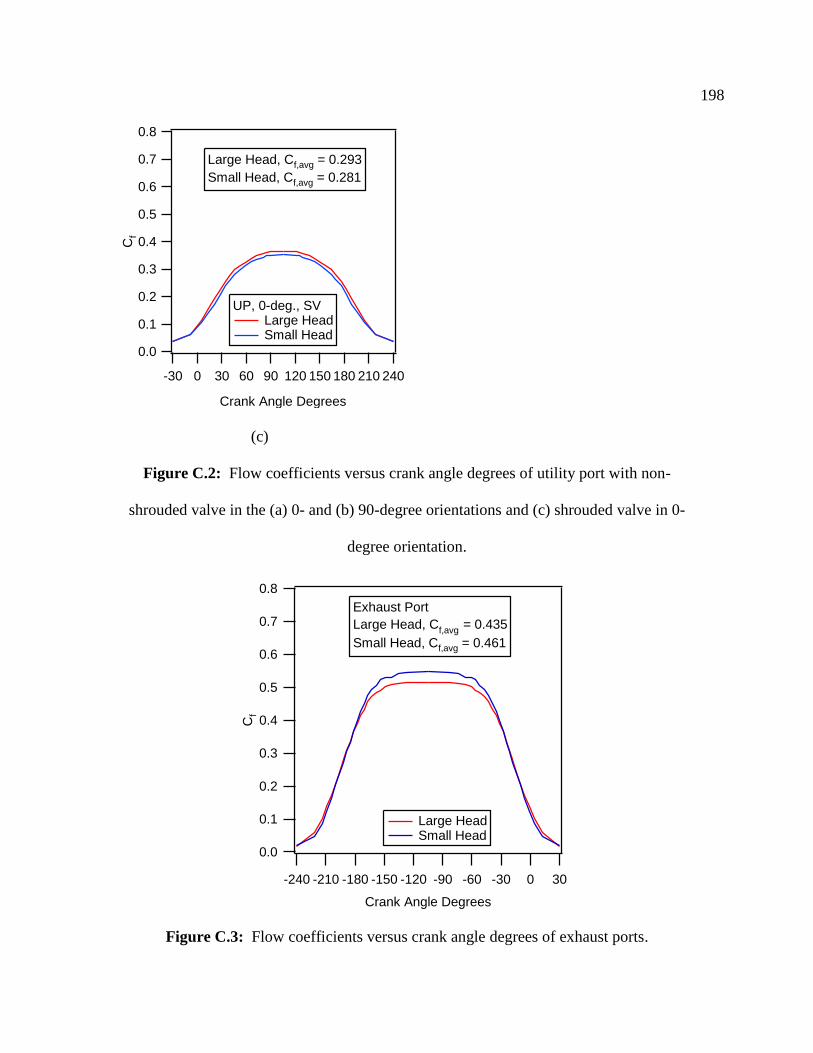
198
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
2402101801501209060300-30
Crank Angle Degrees
UP, 0-deg., SV Large Head Small Head
Large Head, Cf,avg = 0.293
Small Head, Cf,avg = 0.281
(c)
Figure C.2: Flow coefficients versus crank angle degrees of utility port with non-
shrouded valve in the (a) 0- and (b) 90-degree orientations and (c) shrouded valve in 0-
degree orientation.
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Cf
-240 -210 -180 -150 -120 -90 -60 -30 0 30
Crank Angle Degrees
Large Head Small Head
Exhaust Port
Large Head, Cf,avg
= 0.435
Small Head, Cf,avg = 0.461
Figure C.3: Flow coefficients versus crank angle degrees of exhaust ports.

199
C.2. Flow Coefficient Uncertainty Analysis
A repeatability study was conducted to determine the uncertainty of the flow
coefficients for the ports with the non-shrouded valves. As the flow coefficient data were
seen to vary little with port position, the entire repeatability test was conducted using the
90-degree port orientation. Data were taken at four valve lifts, corresponding to 100, 78,
52, and 30% of maximum lift and at a pressure drop of 6.97 kPa. Data were acquired
over the course of two weeks so that changes in ambient room conditions would be
present. The engine heads were also removed from the flow bench and re-attached and
the port positions re-aligned before each test so that operator-related variability would be
present.
The uncertainty of the flow coefficients was obtained by statistically analyzing
the data. The sample mean value of the flow coefficients, fC , was calculated as:
N
iff iC
NC
1
)(1
(C.1)
where N is the number of samples, equal to 11 for this repeatability study. The flow
coefficient sample standard deviation, SCf, was calculated as:
2
1
))((1
1ff
N
iCf CiC
NS . (C.2)
A normal distribution of the data was assumed and the uncertainty for a two-sided, 95%
confidence interval on the mean was calculated as:
N
Stu
Cf
NCf 1,2/ (C.3)

200
where α is the probability of making a type-I error, set equal to 0.05, and 1,2/ Nt is the
value of the test statistic for a t-probability distribution, equal to 2.228. Table C.1
contains the uncertainty results for the large and small heads listed for each non-
dimensional lift, L/D, and Figs C.4 and C.5 show the uncertainty as a confidence interval
on the sample mean flow coefficient. As can be seen, the uncertainty and variability is
small compared to the magnitude of the sample mean flow coefficients.
Large Head Small Head
L/D Performance
Port, uCf
Utility Port,
uCf
Performance
Port, uCf
Utility Port,
uCf
0.075 0.001 0.001 0.002 0.002
0.129 0.002 0.003 0.003 0.003
0.194 0.002 0.001 0.003 0.003
0.248 0.008 0.002 0.002 0.003
Table C.1: Uncertainty of the sample mean flow coefficients for ports with non-
shrouded valves in 90-degree orientation.
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Sam
ple
Mean C
f
0.300.250.200.150.100.05
L/D
Small Head Large Head
Performance Port, 90-degree Orientation, NV11 Samples, 95% Confidence Interval
Figure C.4: Uncertainty on the sample mean flow coefficients for the performance
ports, 90-degree orientation, non-shrouded valves.
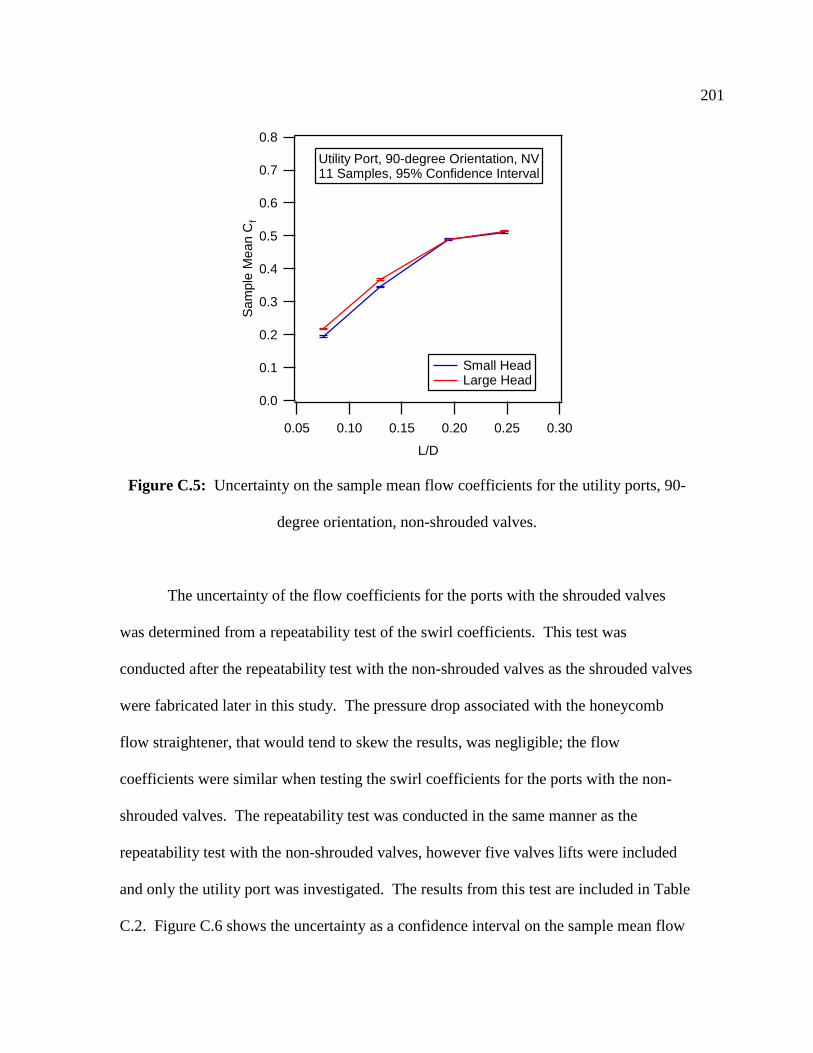
201
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
Sam
ple
Mean C
f
0.300.250.200.150.100.05
L/D
Utility Port, 90-degree Orientation, NV11 Samples, 95% Confidence Interval
Small Head Large Head
Figure C.5: Uncertainty on the sample mean flow coefficients for the utility ports, 90-
degree orientation, non-shrouded valves.
The uncertainty of the flow coefficients for the ports with the shrouded valves
was determined from a repeatability test of the swirl coefficients. This test was
conducted after the repeatability test with the non-shrouded valves as the shrouded valves
were fabricated later in this study. The pressure drop associated with the honeycomb
flow straightener, that would tend to skew the results, was negligible; the flow
coefficients were similar when testing the swirl coefficients for the ports with the non-
shrouded valves. The repeatability test was conducted in the same manner as the
repeatability test with the non-shrouded valves, however five valves lifts were included
and only the utility port was investigated. The results from this test are included in Table
C.2. Figure C.6 shows the uncertainty as a confidence interval on the sample mean flow
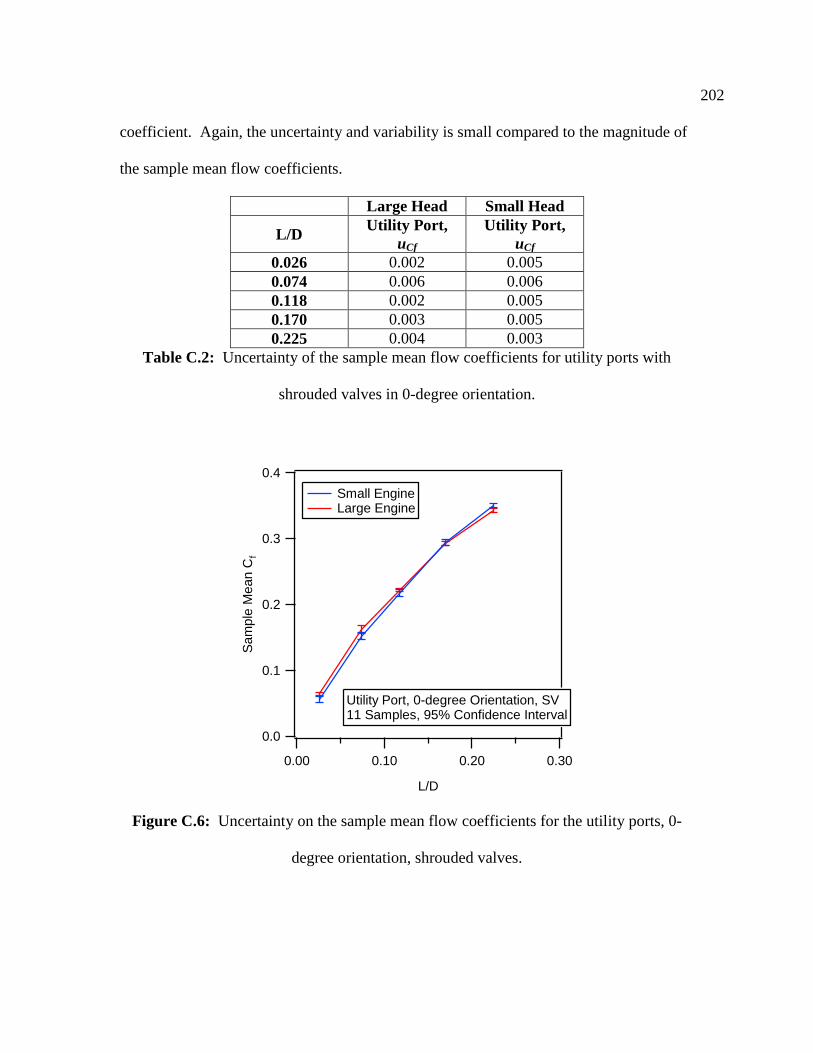
202
coefficient. Again, the uncertainty and variability is small compared to the magnitude of
the sample mean flow coefficients.
Large Head Small Head
L/D Utility Port,
uCf
Utility Port,
uCf
0.026 0.002 0.005
0.074 0.006 0.006
0.118 0.002 0.005
0.170 0.003 0.005
0.225 0.004 0.003
Table C.2: Uncertainty of the sample mean flow coefficients for utility ports with
shrouded valves in 0-degree orientation.
0.4
0.3
0.2
0.1
0.0
Sam
ple
Mean C
f
0.300.200.100.00
L/D
Small Engine Large Engine
Utility Port, 0-degree Orientation, SV11 Samples, 95% Confidence Interval
Figure C.6: Uncertainty on the sample mean flow coefficients for the utility ports, 0-
degree orientation, shrouded valves.

203
The propagation method of [54] was used to calculate a single uncertainty, uCf,avg,
for Cf,avg. In this method, uCf,avg, is defined as:
.2
2
,
, ifavgf
C
i if
avgf
C uC
Cu (C.4)
The uncertainty for each Cfi (i.e. at each valve lift tested) is assumed equal to the
uncertainty at the next highest valve lift determined from the repeatability test.

204
APPENDIX D: SWIRL COEFFICIENT AND SWIRL RATIO UNCERTAINTY
ANALYSIS
This appendix contains the swirl coefficient and swirl ratio uncertainty data of the
small and large heads, as set forth in Chapter 4.
D.1. Swirl Coefficient Uncertainty Analysis
A repeatability study was conducted to determine the uncertainty of the swirl
coefficients for the ports with the shrouded and non-shrouded valves. The swirl
coefficient data were seen to vary little by port type and it was assumed that the
uncertainty would be similar between the two ports. The repeatability test was conducted
with the shrouded valve using the utility port in the 0-degree port orientation and with the
non-shrouded valve using the performance port in the 0-degree port orientation. Data
were taken at five different valve lifts and at a pressure drop of 6.97 kPa. Data were
acquired over the course of two weeks so that changes in ambient room conditions would
be present. The engine heads were also removed from the flow bench and re-attached
and the port positions re-aligned before each test so that operator-related variability
would be present.
The uncertainty of the swirl coefficients was obtained by statistically analyzing
the data. The sample mean value of the swirl coefficients, sC , was calculated as:
N
iss iC
NC
1
)(1
(D.1)
where N is the number of samples, equal to 11 for this repeatability study. The swirl
coefficient sample standard deviation, SCs, was calculated as:

205
2
1
))((1
1ss
N
iCs CiC
NS . (D.2)
A normal distribution of the data was assumed and the uncertainty for a two-sided, 95%
confidence interval on the mean was calculated as:
N
Stu Cs
NCs 1,2/ (D.3)
where α is the probability of making a type-I error, set equal to 0.05, and 1,2/ Nt is the
value of the test statistic for a t-probability distribution, equal to 2.228. Table D.1
contains the uncertainty results for the large and small heads listed for each non-
dimensional lift, L/D, and Figs. D.1 and D.2 show the uncertainty as a confidence interval
on the sample mean swirl coefficient. As can be seen for the shrouded valves, Fig. D.1,
the uncertainty overlaps at the higher valves lifts where most of the air mass enters the
engine cylinder, but at the lower valve lifts the uncertainty of the small head grows. As
can be seen for the non-shrouded valves, Fig. D.2, the swirl coefficients of both heads are
low in magnitude and the uncertainties are fairly small.

206
Large Head Small Head
L/D
Utility Port,
Shrouded
Valve
Performance
Port, Non-
shrouded
Valve
Utility Port,
Shrouded
Valve
Performance
Port, Non-
shrouded
Valve
0.026 0.014 0.008 0.185 0.037
0.074 0.014 0.011 0.056 0.015
0.118 0.010 0.046 0.061 0.015
0.170 0.009 0.007 0.035 0.009
0.225 0.012 0.005 0.031 0.010
Table D.1: Uncertainty of the sample mean swirl coefficients for the ports in the 0-
degree orientation.
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
Sa
mp
le M
ean
Cs
0.250.200.150.100.050.00
L/D
Utility Port, 0-degree Orientation, SVOpen Symbol: Small HeadFilled Symbol: Large Head
Figure D.1: Uncertainty of the sample mean swirl coefficients for the utility ports, 0-
degree orientation, shrouded valves.

207
-0.3
-0.2
-0.1
0.0
0.1
0.2
Sa
mp
le M
ean
Cs
0.250.200.150.100.050.00
L/D
Performance Port, 0-degree Orientation, NVOpen Symbol: Small HeadFilled Symbol: Large Head
Figure D.2: Uncertainty of the sample mean swirl coefficients for the performance
ports, 0-degree orientation, non-shrouded valves.
D.2. Swirl Ratio Uncertainty Analysis
The propagation method of [54] was again used to calculate a single uncertainty,
uRs, for Rs. In this method, since there is uncertainty in both the flow and swirl
coefficients, uRs is defined as:
.2
2
2
2
ii Cf
i if
sCs
i is
sRs u
C
Ru
C
Ru (D.4)
Again, the uncertainty for each Cfi and Csi (i.e. at each valve lift tested) is assumed equal
to the uncertainty at the next highest valve lift determined from the repeatability test.

208
APPENDIX E: MATLAB CODE
E.1. MATLAB Code to Calculate the Low-Magnification FOV Swirl Center and
Angular Velocity
clear all; %----------------User Inputs--------------- % note: change process number (e.g. P001) below depending on % process number in Insight3G. This file works only for exporting the %2nd choice vectors into the .vec file. %Directory and first part of name of .vec files from TSI's Insight3G: Vector_file='C:\Experiments7\Small_engine_full_FOV\SUshroud\Analysis\11
3010_600rpm_SUshroud_90bTDC_50us_'; numb=50; %number of vector files to load per set %m_pixel=44.28e-6; %meters per pixel, large engine m_pixel=26.04e-6; %meters per pixel, small engine vector_spacing=16;%pixels separating each velocity vector (evenly
spaced) omega1=0; %[rad/s], lower bound initial guess for angular rotation rate omega3=1000; %[rad/s], upper bound initial guess angular rotation rate omega_tol=0.1; %set the omega tolerance when searching for the correct %omega that minimizes the SSE %---------------End User Inputs---------------- for i=1:numb %read in the set of data if i<10 %loop is used in the naming scheme for each file q=10000; elseif i<100 q=1000; else q=100; end %sets the vector file name into a variable
Vector_name=[Vector_file,num2str(q),num2str(i),'.T001.D001.P003.H001.L.
vec']; fid = fopen(Vector_name, 'r'); %ignores the first line text, reads in the data data = textscan(fid, '%n, %n, %n, %n, %n', 'headerlines', 1); for j=1:5 %Five columns of data to save, the columns are the pixel %location, the vector x and y velocity, and the choice code %Save data into 3D matrix for all vector files Total(:,j,i)=data{:,j}; end status = fclose(fid); %close the reading of the .vec file end %this uses both good and interpolated vectors to find the mean Total_mean(:,:)=mean(Total,3); %Calculates the mean at each vector %location, 3 denotes the matrix dimension on which to calculate. %Note: image imported from Insight3G must have origin at lower left
hand %corner. Then, Total has x in first column, y in second column, where

209
%x increments each time, y starts with largest value and decrements %(e.g. [1 20...;2 20...;320...;1 19...; etc.] %The below code is setup for this format. m=63; %initialize x direction row counter n=1; %initialize y direction column counter number_rows=5040; % note: for 32x32 pixel interrogation region, % 80 rows equals 1 image row, 5040 total rows. U_mean=zeros(m,80); V_mean=zeros(m,80); Choice_code=zeros(m,80); x_matrix=zeros(m,80); y_matrix=zeros(m,80); %preallocate for speed for j=1:number_rows %manually input rows to process (Insight3G does %NOT give a regular square of vectors, so this input process %cannot be totally automated) U_mean(m,n)=Total_mean(j,3);%create matrix with mean u velocity V_mean(m,n)=Total_mean(j,4);%create matrix with mean v velocity Choice_code(m,n)=Total(j,5,1);%save a matrix with the Insight3G %choice codes from first individual image, only care about -2 %code where there was no vectors (processing) x_matrix(m,n)=Total(j,1,1); %save x and y locations to matrices y_matrix(m,n)=Total(j,2,1); n=n+1; if j==number_rows elseif Total(j+1,2,1)<Total(j,2,1) m=m-1; %if y position decrements, then reset column counter, %increase row counter n=1; end end %use the golden search method to find omega (angular rotation rate) %that minimizes the SSE, this bracketing method follows the UCSD %MAE290A course materials book, p.51 evals=0; %interation loop counter initialization Z=sqrt(5)-2; %initialize goldend section ratio omega2=omega1+(omega3-omega1)*0.381966; %set omega2 for golden ratio %call function three times [SSE_min1]=Compute_SSE_min(U_mean, V_mean, x_matrix, y_matrix,
Choice_code, omega1); [SSE_min2]=Compute_SSE_min(U_mean, V_mean, x_matrix, y_matrix,
Choice_code, omega2); [SSE_min3]=Compute_SSE_min(U_mean, V_mean, x_matrix, y_matrix,
Choice_code, omega3); while (abs(omega3-omega1) > omega_tol) omega4 = omega2+Z*(omega3-omega1); %compute the new omega4 %call function [SSE_min4]=Compute_SSE_min(U_mean, V_mean, x_matrix, y_matrix,
Choice_code, omega4); evals=evals+1 %loop counter %SSE_min2 if (SSE_min4>SSE_min2) omega3=omega1; SSE_min3=SSE_min1; %center new triplet on x2 %omega2=omega2; SSE_min2=SSE_min2; omega1=omega4; SSE_min1=SSE_min4; else omega1=omega2; SSE_min1=SSE_min2; %center new triplet on x2 %omega3=omega3; SSE_min3=SSE_min3;

210
omega2=omega4; SSE_min2=SSE_min4; end end % figure,contourf(V_mean); % title({'V_mean'}) % colorbar('location','EastOutside') omega=omega2; %calculate SSE countour using omega that minimizes the
SSE SSE=zeros(63,80); %initialize sum square error matrix, %will find min of processed area below for i=1:63 %rows %find the points that have vectors to set as the %swirl center test point for j=1:80 %columns %make sure a vector was calculated at this position if Choice_code(i,j) ~= -2 SSE_sum=0; %reset sum of SSE to zero at start of each loop x_center=x_matrix(i,j); %set x and y for the center point y_center=y_matrix(i,j); for k=1:63 %rows %go through each point, finding where the %vectors are, this is the outer point, to calculate Vr for l=1:80 %columns %make sure a vector was calculated at this position if Choice_code(k,l) ~= -2 x_outer=x_matrix(k,l); %set x for outer point y_outer=y_matrix(k,l); %set y for outer point %calculate x and y velocity components given %omega, divide by 1000 to convert from mm to m Vr_x=-omega*(y_outer-y_center)/1000; Vr_y=omega*(x_outer-x_center)/1000; %calculate the squared error between center and %outer points SSE_outerpoint=(U_mean(k,l)-
Vr_x)^2+(V_mean(k,l)-Vr_y)^2; %add to SSE_sum for each outer point SSE_sum=SSE_sum+SSE_outerpoint; end end end %for center point tested, assign sum squared error to SSE SSE(i,j)=SSE_sum; end end end figure,contourf(SSE); title({'SSE'}) xlabel('Data Columns', 'FontWeight', 'Bold' ); ylabel('Data Rows', 'FontWeight', 'Bold' ); colorbar('location','EastOutside') %find min value in SSE while ignoring the points where no vectors occur min_start=0; %use as way to set min value to first SSE value checked x_column=0; %initialize at zero y_row=0; for i=1:63 %row for j=1:80 %column %make sure vector was calculated at this position

211
if Choice_code(i,j) ~= -2 if min_start == 0 SSE_min=SSE(i,j); %set min to the first value checked %set value=1 so that "if statement" isn't used anymore min_start = 1; %save column and row of place where minimum occurs x_column=j; y_row=i; else if SSE(i,j)<SSE_min %reset SSE_min, x,y locations if new minimum found SSE_min=SSE(i,j); SSE_min_x=x_matrix(i,j); SSE_min_y=y_matrix(i,j); %save column, row of place where minimum occurs x_column=j; y_row=i; end end end end end SSE_min %print to screen, minimum sum squared error SSE_min_x %x location of min SSE SSE_min_y %y location of min SSE omega %angular rotation rate %having found omega, x, y of the swirl center, compute and plot %the solid body velocity profile %initialize solid body velocity matrices for speed Vx_body=zeros(63,80); Vy_body=zeros(63,80); V_mag=zeros(63,80); %find the points that have vectors to set as swirl center test point for i=1:63 %rows for j=1:80 %columns %make sure a vector was calculated at this position if Choice_code(i,j) ~= -2 %calculate the x and y velocity components given omega, %divide by 1000 to convert from mm to meters Vx_body(i,j)=-omega*(y_matrix(i,j)-SSE_min_y)/1000; Vy_body(i,j)=omega*(x_matrix(i,j)-SSE_min_x)/1000; %velocity magnitude V_mag(i,j)=(Vx_body(i,j)^2+Vy_body(i,j)^2)^0.5; end end end figure,contourf(x_matrix,y_matrix,V_mag); %caxis([0 5]) hold on %# denotes arrow length, k makes the arrows black quiver(x_matrix,y_matrix,Vx_body,Vy_body, 3, 'k') hold off xlabel(' x [mm] [m/s]', 'FontWeight', 'Bold' ); ylabel('y [mm]', 'FontWeight', 'Bold' ); colorbar('location','EastOutside'); %this next loop figures out the center x and y for the FOV lim_start=0; %use as a way to set starting point for i=1:63 %row

212
for j=1:80 %column %make sure a vector was calculated at this position if Choice_code(i,j) ~= -2 if lim_start == 0 x_min=x_matrix(i,j); %set the first x_min x_max=x_matrix(i,j); %set the first x_max y_min=y_matrix(i,j); %set the first y_min y_max=y_matrix(i,j); %set the first y_max % set value=1 so this if statement isn't used anymore lim_start = 1; else %test each point to find the mins and maxs if x_matrix(i,j) < x_min x_min=x_matrix(i,j); end if x_matrix(i,j) > x_max x_max=x_matrix(i,j); end if y_matrix(i,j) < y_min y_min=y_matrix(i,j); end if y_matrix(i,j) > y_max y_max=y_matrix(i,j); end end end end end x_center=(x_max+x_min)/2 %find, print the center points, in [mm] y_center=(y_max+y_min)/2
E.2. MATLAB Code to Calculate the Turbulence Intensity of the Ensemble Average
Data
clear all; %----------------User Inputs--------------- %note: need to change process number (e.g. P001) below depending on %process number in Insight3G. This file works only for exporting the %2nd choice vectors into the .vec file. %Directory and first part of name of .vec files from TSI's Insight3G: Vector_file='C:\Experiments7\Engine_small_FOV\LUshroud_14psi\Analysis\0
32910_LUshroud_1200rpm_TDC_SFOV_6jet35psi10usf22_final_'; numb=200; %number of vector files to load per set vector_spacing=16; %pixels separating each velocity vector(evenly
spaced) %---------------End User Inputs---------------- for i=1:numb %read in the set of data if i<10 %if loop is used in the naming scheme for each file q=10000; elseif i<100

213
q=1000; else q=100; end %sets the vector file name into a variable
Vector_name=[Vector_file,num2str(q),num2str(i),'.T001.D001.P005.H001.L.
vec']; fid = fopen(Vector_name, 'r'); %ignores the first line text, reads in the data data = textscan(fid, '%n, %n, %n, %n, %n, %n, %n', 'headerlines',
1); for j=1:5 %five columns of data to save, columns are pixel %location, vector x and y velocity, and the choice code %save data into 3D matrix for all vector files Total(:,j,i)=data{:,j}; end status = fclose(fid); %close the reading of the .vec file end %determine number of rows in Total matrix [Total_rows, Total_columns]=size(Total(:,:,1)); %this loop calculates mean velocity at each vector location using only %"good" vectors for jjj=1:Total_rows %this loop calculates mean velocity at each %vector location using only "good" vectors Total_sum_good_x=0; %reset at start of each loop, x velocity sum Total_sum_good_y=0; %reset at start of each loop, y velocity sum count_Total_sum=0; %reset at start of each loop for i=1:numb %for each vector location, if choice code is 1 %or 2, increase the sum and count if Total(jjj,5,i)==1 Total_sum_good_x=Total_sum_good_x+Total(jjj,3,i); Total_sum_good_y=Total_sum_good_y+Total(jjj,4,i); count_Total_sum=count_Total_sum+1; elseif Total(jjj,5,i)==2 Total_sum_good_x=Total_sum_good_x+Total(jjj,3,i); Total_sum_good_y=Total_sum_good_y+Total(jjj,4,i); count_Total_sum=count_Total_sum+1; end end %find the mean x and y velocity of only good vectors Total_mean(jjj,1)=Total_sum_good_x/count_Total_sum; Total_mean(jjj,2)=Total_sum_good_y/count_Total_sum; end for i=1:numb Total_fluct(:,1,i)=Total(:,1,i); %copies over x location Total_fluct(:,2,i)=Total(:,2,i); %copies over y location %subtract mean from total to find fluctuating u velocity Total_fluct(:,3,i)=Total(:,3,i)-Total_mean(:,1); %subtract mean from total to find fluctuating v velocity Total_fluct(:,4,i)=Total(:,4,i)-Total_mean(:,2); Total_fluct(:,5,i)=Total(:,5,i);%copies over choice code for vector end [rows_total cols_total]=size(Total(:,:,1)); %read size of vector files

214
%note: image imported from Insight3G must have origin at lower left
hand corner. Then, Total has x in first column, y in second column, %where x increments each time, y starts with largest value and %decrements (e.g. [1 20...;2 20...;3 20...;1 19...; etc.] The below %code is setup for this format. for i=1:numb m=61; %initialize x direction row counter n=1; %initialize y direction row counter number_rows=5040; %note: For 32x32 pixel interrogation region, 80 rows equals 1 %image row, 5040 total rows. %For 16x16 pixels, 161 rows equals 1 image row, 20447 total rows %manually input rows to process (Insight3G does NOT give a regular %square of vectors, so input process cannot be totally automated) for j=161:number_rows %computes fluctuating (turbulent) kinetic energy, assumes
%isotropy multiply by 3/2 to get 3D fluctuating kinetic energy
KE_fluct(m,n,i)=(1/2)*(Total_fluct(j,3,i)^2+Total_fluct(j,4,i)^
2)*(3/2);
%create matrix with fluctuating u component of velocity U_fluct(m,n,i)=Total_fluct(j,3,i); %create matrix with fluctuating v component of velocity V_fluct(m,n,i)=Total_fluct(j,4,i); %create matrix with mean u component of velocity U_mean(m,n)=Total_mean(j,1); %create matrix with mean v component of velocity V_mean(m,n)=Total_mean(j,2);
%create matrix with x location x_location(m,n)=Total_fluct(j,1,1);
%create matrix with y location y_location(m,n)=Total_fluct(j,2,1); %save a matrix with the Insight3G choice codes Choice_code(m,n,i)=Total_fluct(j,5,i); n=n+1; if j==number_rows elseif Total_fluct(j+1,2,i)<Total_fluct(j,2,i) m=m-1; %if y position decrements, then reset column
%counter, increase row counter
n=1; end end end %this part gets rid of RHS and LHS columns with no vector data KE_fluct_save=KE_fluct; U_fluct_save=U_fluct; V_fluct_save=V_fluct;
Choice_code_save=Choice_code; U_mean_save=U_mean;V_mean_save=V_mean; x_location_save=x_location; y_location_save=y_location; clear KE_fluct U_fluct V_fluct Choice_code U_mean V_mean x_location
y_location; KE_fluct=KE_fluct_save(:,3:80,:); U_fluct=U_fluct_save(:,3:80,:); V_fluct=V_fluct_save(:,3:80,:);Choice_code=Choice_code_save(:,3:80,:); U_mean=U_mean_save(:,3:80,:); V_mean=V_mean_save(:,3:80,:); x_location=x_location_save(:,3:80,:);
y_location=y_location_save(:,3:80,:); %figure out size of new matrices

215
[rows_choice cols_choice]=size(Choice_code(:,:,1));
----E.2. Reference 1---- %initialize size of matrix U_fluct_EA_field_sum=zeros(rows_choice, cols_choice);
%this next code calculates turbulence intensity of entire FOV chosen for i=1:numb %square each u fluctuating component U_fluct_squared(:,:,i)=U_fluct(:,:,i).^2; %square each v fluctuating component V_fluct_squared(:,:,i)=V_fluct(:,:,i).^2; %magnitude of fluctuating component squared Fluct_squared(:,:,i)=U_fluct_squared(:,:,i)+V_fluct_squared(:,:,i); end %this next part of the code calculates the turb intensity, mean %squared u fluct, and mean square v fluct, using only good %vectors where choice code equals one or two. for jj=1:rows_choice for qq=1:cols_choice Fluct_squared_sum_good=0; %reset at start of each loop U_fluct_squared_sum_good=0; %reset at start of each loop V_fluct_squared_sum_good=0; %reset at start of each loop count_FSSG_sum=0; %reset at start of each loop for i=1:numb if Choice_code(jj,qq,i)==1 Fluct_squared_sum_good = Fluct_squared_sum_good +
Fluct_squared(jj,qq,i); U_fluct_squared_sum_good = U_fluct_squared_sum_good +
U_fluct_squared(jj,qq,i); V_fluct_squared_sum_good = V_fluct_squared_sum_good +
V_fluct_squared(jj,qq,i); count_FSSG_sum=count_FSSG_sum+1; elseif Choice_code(jj,qq,i)==2 Fluct_squared_sum_good = Fluct_squared_sum_good +
Fluct_squared(jj,qq,i); U_fluct_squared_sum_good = U_fluct_squared_sum_good +
U_fluct_squared(jj,qq,i); V_fluct_squared_sum_good = V_fluct_squared_sum_good +
V_fluct_squared(jj,qq,i); count_FSSG_sum=count_FSSG_sum+1; end end %calculates the mean at each vector location Fluct_mean_good(jj,qq)=Fluct_squared_sum_good/count_FSSG_sum; %calculates the mean at each vector location U_fluct_mean_good(jj,qq) = U_fluct_squared_sum_good /
count_FSSG_sum; %calculates the mean at each vector location V_fluct_mean_good(jj,qq) = V_fluct_squared_sum_good /
count_FSSG_sum; end end
----E.2. Reference 2---- turbulence_intensity_good=mean(mean(Fluct_sqrt_good)) %turb intensity
216
E.3. MATLAB Code to Calculate the Turbulence Intensity of the Spatial-Average
Data
clear all; %----------------User Inputs--------------- %note: need to change process number (e.g. P001) below depending on %process number in Insight3G. This file works only for exporting the %2nd choice vectors into the .vec file. %Directory and first part of name of .vec files from TSI's Insight3G: Vector_file='C:\Experiments7\Engine_small_FOV\LUshroud_14psi\Analysis\0
32910_LUshroud_1200rpm_TDC_SFOV_6jet35psi10usf22_final_'; numb=200; %number of vector files to load per set m_pixel=13.57e-6; %large engine, meters per pixel %m_pixel=8.166605e-6; %small engine, meters per pixel; SPshroud,
SPswirl: %8.100353; SPtumble, SUshroud: 8.029316; SUswirl, SUtumble: 8.166605 vector_spacing=16;%pixels separating each velocity vector %number of rows & columns to omit after using the Fourier transfer (get %rid of edge effects) omit_row_col=5; %---------------End User Inputs---------------- for i=1:numb %read in the set of data if i<10 %loop is used in the naming scheme for each file q=10000; elseif i<100 q=1000; else q=100; end %sets the vector file name into a variable
Vector_name =
[Vector_file,num2str(q),num2str(i),'.T001.D001.P005.H001.L.vec']; fid = fopen(Vector_name, 'r'); %ignores the first line text, reads in the data data = textscan(fid, '%n, %n, %n, %n, %n, %n, %n', 'headerlines',
1); for j=1:5 %five columns of data to save, the columns are the pixel %location, the vector x and y velocity, and the choice code Total(:,j,i)=data{:,j};%save data into 3D matrix end status = fclose(fid); %close the reading of the .vec file end %read in the size of the vector files [rows_total cols_total]=size(Total(:,:,1)); %note: image imported from Insight3G must have origin at lower left
hand corner. Then, Total has x in first column, y in second column, %where x increments each time, y starts with largest value and %decrements (e.g. [1 20...;2 20...;3 20...;1 19...; etc.] The below %code is setup for this format. for i=1:numb m=61; %initialize x direction row counter n=1; %initialize y direction row counter number_rows=5040;

217
%note: For 32x32 pixel interrogation region, 80 rows equals 1 %image row, 5040 total rows. For 16x16 pixels, 161 rows equals 1 %image row, 20447 total rows %manually input rows to process (Insight3G does NOT give a regular %square of vectors, so input process cannot be totally automated) for j=161:number_rows U_total(m,n,i)=Total(j,3,i);%create matrix with u velocity V_total(m,n,i)=Total(j,4,i);%create matrix with v velocity x_total(m,n,i)=Total(j,1,i);%create matrix with x locations y_total(m,n,i)=Total(j,2,i);%create matrix with y locations n=n+1; if j==number_rows elseif Total(j+1,2,i)<Total(j,2,i) m=m-1; %if y position decrements, then reset column %counter, increase row counter n=1; end end end %this part gets rid of RHS and LHS columns with no vector data U_total_save=U_total; V_total_save=V_total; x_total_save=x_total;
y_total_save=y_total; clear U_total V_total x_total y_total; U_total=U_total_save(:,3:80,:); V_total=V_total_save(:,3:80,:);
x_total=x_total_save(:,3:80,:); y_total=y_total_save(:,3:80,:); [rows cols]=size(U_total(:,:,1)); %read in the size of the matrix %------the next loop checks if the number of rows is even, and drops %the last row if the number is odd,this allows for correct plotting of %k vs. E (not in this code) test=rows/2; test2=round(test); if test~=test2
%reset the size of matrices if a row is subtracted U_total=U_total(1:(rows-1),:,:); V_total=V_total(1:(rows-1),:,:); x_total=x_total(1:(rows-1),:,:); y_total=y_total(1:(rows-1),:,:); [rows cols]=size(U_total(:,:,1)); end %------the next loop checks if the number of columns is even, and drops %last column if the number is odd,this allows for correct plotting of k %vs. E (not in this code) test3=cols/2; test4=round(test3); if test3~=test4
%reset the size of matrices if a column is subtracted U_total=U_total(:,1:(cols-1),:); V_total=V_total(:,1:(cols-1),:); x_total=x_total(:,1:(cols-1),:); y_total=y_total(:,1:(cols-1),:); [rows cols]=size(U_total(:,:,1)); end loop=1; %loop counter to make vector with integral lengthscales for L_cut=0.001:0.001:0.015 %[meters] [rows cols]=size(U_total(:,:,1)); %reset the size of the U_total matrix

218
kappa=2*pi/(m_pixel*vector_spacing);%kappa equals 2*pi divided by L k_cutoff=2*pi/L_cut; %cutoff frequency %VERTICAL %creates kappa vector with wavenumbers from zero to kappa/2 k_vert_right=kappa*(0:(rows/2))/rows; %since the FFT is symmetric about zero, this makes a vector for %wavenumbers on the opposite side for i=1:(rows/2-1) k_vert_left(1,i)=k_vert_right(1,(rows/2+1-i)); end %combine vectors, they should correspond to their counterparts from FFT k_vert_RandL=[k_vert_right,k_vert_left]; %HORIZONTAL %creates kappa vector with wavenumbers from zero to kappa/2 k_horiz_right=kappa*(0:(cols/2))/cols; %since the FFT is symmetric about zero, this makes a vector for %wavenumbers on the opposite side for i=1:(cols/2-1) k_horiz_left(1,i)=k_horiz_right(1,(cols/2+1-i)); end %combine vectors, they should correspond to their counterparts from FFT k_horiz_RandL=[k_horiz_right,k_horiz_left]; %initialize for speed k_matrix=zeros(rows,cols); k_filter=zeros(rows,cols); for i=1:rows for j=1:cols %find k at each point from k in x and y directions k_matrix(i,j)=sqrt(k_vert_RandL(1,i)^2+k_horiz_RandL(1,j)^2); %then find filter value,from SAE 880381, fig. 3.d k_filter(i,j)=1/(1+exp((k_matrix(i,j) - k_cutoff) /
(0.1*k_cutoff))); end end %initialize matrices to increase speed FFT_U=zeros(rows,cols,numb); FFT_U_filtered=zeros(rows,cols,numb); U_cycle_mean=zeros(rows,cols,numb); V_cycle_mean=zeros(rows,cols,numb); FFT_V=zeros(rows,cols,numb); FFT_V_filtered=zeros(rows,cols,numb); U_fluct=zeros(rows,cols,numb); V_fluct=zeros(rows,cols,numb); KE_fluct=zeros(rows,cols,numb); for j=1:numb %matrix loop %fourier transform U velocity into k space FFT_U(:,:,j)=fft2(U_total(:,:,j)); %multiply by the filter at each k FFT_U_filtered(:,:,j)=FFT_U(:,:,j).*k_filter; %magnitude of the FFT of the u component of velocity Mag_FFT(:,:,j)=(real(FFT_U(:,:,j))).^2+(imag(FFT_U(:,:,j))).^2; %inv fourier transform back to U space, this is low pass velocity U_cycle_mean(:,:,j)=ifft2(FFT_U_filtered(:,:,j)); %calculate the cycle resolved fluctuating velocity u U_fluct(:,:,j)=U_total(:,:,j)-U_cycle_mean(:,:,j); %fourier transform V velocity into k space FFT_V(:,:,j)=fft2(V_total(:,:,j)); %multiply by the filter at each k FFT_V_filtered(:,:,j)=FFT_V(:,:,j).*k_filter; %inv fourier transform back to U space, this is low pass velocity

219
V_cycle_mean(:,:,j)=ifft2(FFT_V_filtered(:,:,j)); %calculate the cycle resolved fluctuating velocity u V_fluct(:,:,j)=V_total(:,:,j)-V_cycle_mean(:,:,j); %computes fluctuating (turbulent) kinetic energy, assuming isotropy %multiply by 3/2 to get 3D fluctuating kinetic energy KE_fluct(:,:,j)=(1/2)*(U_fluct(:,:,j).^2+V_fluct(:,:,j).^2)*(3/2); end
----E.3. Reference 1---- %initialize size of matrix U_fluct_squared=zeros(rows,cols,numb);
V_fluct_squared=zeros(rows,cols,numb);
Fluct_squared=zeros(rows,cols,numb);
%initialize matrices to increase speed for i=1:numb %square each u fluctuating component U_fluct_squared(:,:,i)=U_fluct(:,:,i).^2; %square each v fluctuating component V_fluct_squared(:,:,i)=V_fluct(:,:,i).^2; %magnitude of fluctuating component squared Fluct_squared(:,:,i)=U_fluct_squared(:,:,i)+V_fluct_squared(:,:,i); end
----E.3. Reference 2---- Fluct_squared_mean=mean(Fluct_squared,3); %calculates the mean at each
vector location
Fluct_sqrt=Fluct_squared_mean.^(1/2); %calculates the square root at
each vector location, or turbulence intensity turbulence_intensity_sum=0; %initialize total_count=0; %initialize %this loop gets rid of data with the edge effects for i=(omit_row_col+1):(rows-omit_row_col) for j=(omit_row_col+1):(cols-omit_row_col) %turbulence intensity turbulence_intensity_sum = turbulence_intensity_sum +
Fluct_sqrt(i,j);
total_count=total_count+1; end end %calculates the turbulence intensity turbulence_intensity=turbulence_intensity_sum/total_count;
Turb_int_vector(loop,:)=[L_cut, turbulence_intensity]; loop=loop+1; %increase loop counter end Turb_int_vector %print to screen
220
E.4. MATLAB Code to Calculate the Correlation Lengthscales Using the Ensemble
Average Data, Single-Sided Correlation
This code uses the same code from the start of E.2. until line E.2. Reference 1.
%read in the size of the fluctuating KE matrix [rows cols]=size(KE_fluct(:,:,1)); %------the next loop checks if the number of rows is even, and drops %the last row if the number is odd, this allows for correct plotting of %k vs. E (not in this code) test=rows/2; test2=round(test); if test~=test2
%reset the size of matrices if a row is subtracted KE_fluct=KE_fluct(1:(rows-1),:,:); U_fluct=U_fluct(1:(rows-1),:,:); V_fluct=V_fluct(1:(rows-1),:,:); [rows cols]=size(KE_fluct(:,:,1)); end %------the next loop checks if the number of columns is even, and %drops the last column if the number is odd, this allows for correct %plotting of k vs. E (not in this code) test3=cols/2; test4=round(test3); if test3~=test4
%reset the size of matrices if a column is subtracted KE_fluct=KE_fluct(:,1:(cols-1),:); U_fluct=U_fluct(:,1:(cols-1),:); V_fluct=V_fluct(:,1:(cols-1),:); [rows cols]=size(KE_fluct(:,:,1)); end %the VERTICAL correlation coefficient is now calculated as defined in %eqn. 3.93 of Pope's Turbulent Flows book %note: since rows is even, it doesn't calculate using the last row for iii=1:numb for jjj=1:cols for kkk=1:rows %numerator for rows above
Covariance_u_above(kkk,jjj,iii)=U_fluct(rows,jjj,iii)*U_fluct(rows+1-
kkk,jjj,iii);
%numerator for rows below
Covariance_u_below(kkk,jjj,iii)=U_fluct(1,jjj,iii)*U_fluct(kkk,jjj,iii)
; %denominator for rows above Variance_u_above(kkk,jjj,iii)=(U_fluct(rows+1-
kkk,jjj,iii))^2; %denominator for rows below Variance_u_below(kkk,jjj,iii)=(U_fluct(kkk,jjj,iii))^2;

221
%numerator for rows above
Covariance_v_above(kkk,jjj,iii)=V_fluct(rows,jjj,iii)*V_fluct(rows+1-
kkk,jjj,iii); %numerator for rows below
Covariance_v_below(kkk,jjj,iii)=V_fluct(1,jjj,iii)*V_fluct(kkk,jjj,iii)
; %denominator for rows above Variance_v_above(kkk,jjj,iii)=(V_fluct(rows+1-
kkk,jjj,iii))^2; %denominator for rows below Variance_v_below(kkk,jjj,iii)=(V_fluct(kkk,jjj,iii))^2; %numerator for rows above
Covariance_uv_above(kkk,jjj,iii)=U_fluct(rows,jjj,iii)*V_fluct(rows+1-
kkk,jjj,iii); %numerator for rows below
Covariance_uv_below(kkk,jjj,iii)=U_fluct(1,jjj,iii)*V_fluct(kkk,jjj,iii
); %numerator for rows above
Covariance_vu_above(kkk,jjj,iii)=V_fluct(rows,jjj,iii)*U_fluct(rows+1-
kkk,jjj,iii); %numerator for rows below
Covariance_vu_below(kkk,jjj,iii)=V_fluct(1,jjj,iii)*U_fluct(kkk,jjj,iii
); end end end %find mean of matrices along all data sets Covariance_u_above_mean=mean(Covariance_u_above,3); Covariance_u_below_mean=mean(Covariance_u_below,3); Covariance_v_above_mean=mean(Covariance_v_above,3); Covariance_v_below_mean=mean(Covariance_v_below,3); Covariance_uv_above_mean=mean(Covariance_uv_above,3); Covariance_uv_below_mean=mean(Covariance_uv_below,3); Covariance_vu_above_mean=mean(Covariance_vu_above,3); Covariance_vu_below_mean=mean(Covariance_vu_below,3); Variance_u_above_mean=mean(Variance_u_above,3); Variance_u_below_mean=mean(Variance_u_below,3); Variance_v_above_mean=mean(Variance_v_above,3); Variance_v_below_mean=mean(Variance_v_below,3); %%VERTICAL correlation for jjj=1:cols for kkk=1:rows %calculate correlation coefficient all columns for rows above
Correlation_u_above(kkk,jjj)=Covariance_u_above_mean(kkk,jjj)/((Varianc
e_u_above_mean(1,jjj)*Variance_u_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows below
Correlation_u_below(kkk,jjj)=Covariance_u_below_mean(kkk,jjj)/((Varianc
e_u_below_mean(1,jjj)*Variance_u_below_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows above
Correlation_v_above(kkk,jjj)=Covariance_v_above_mean(kkk,jjj)/((Varianc
e_v_above_mean(1,jjj)*Variance_v_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows below
Correlation_v_below(kkk,jjj)=Covariance_v_below_mean(kkk,jjj)/((Varianc
e_v_below_mean(1,jjj)*Variance_v_below_mean(kkk,jjj))^0.5);

222
%calculate correlation coefficient all columns for rows above
Correlation_uv_above(kkk,jjj)=Covariance_uv_above_mean(kkk,jjj)/((Varia
nce_u_above_mean(1,jjj)*Variance_v_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows below
Correlation_uv_below(kkk,jjj)=Covariance_uv_below_mean(kkk,jjj)/((Varia
nce_u_below_mean(1,jjj)*Variance_v_below_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows above
Correlation_vu_above(kkk,jjj)=Covariance_vu_above_mean(kkk,jjj)/((Varia
nce_v_above_mean(1,jjj)*Variance_u_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient all columns for rows below
Correlation_vu_below(kkk,jjj)=Covariance_vu_below_mean(kkk,jjj)/((Varia
nce_v_below_mean(1,jjj)*Variance_u_below_mean(kkk,jjj))^0.5); end end %average all correlation coefficients Correlation_u_above_mean=mean(Correlation_u_above,2); Correlation_u_below_mean=mean(Correlation_u_below,2); Correlation_u_vert_mean=(Correlation_u_above_mean+Correlation_u_below_m
ean)/2; %average all correlation coefficients Correlation_v_above_mean=mean(Correlation_v_above,2); Correlation_v_below_mean=mean(Correlation_v_below,2); Correlation_v_vert_mean=(Correlation_v_above_mean+Correlation_v_below_m
ean)/2; %average all correlation coefficients Correlation_uv_above_mean=mean(Correlation_uv_above,2); Correlation_uv_below_mean=mean(Correlation_uv_below,2); Correlation_uv_vert_mean=(Correlation_uv_above_mean+Correlation_uv_belo
w_mean)/2; %average all correlation coefficients Correlation_vu_above_mean=mean(Correlation_vu_above,2); Correlation_vu_below_mean=mean(Correlation_vu_below,2); Correlation_vu_vert_mean=(Correlation_vu_above_mean+Correlation_vu_belo
w_mean)/2; %the HORIZONTAL correlation coefficient is now calculated as defined %in eqn. 3.93 of Pope's Turbulent Flows book %note: since columns is even, it doesn't calculate using last column for iii=1:numb for kkk=1:rows for jjj=1:cols %numerator for cols left
Covariance_u_left(kkk,jjj,iii)=U_fluct(kkk,cols,iii)*U_fluct(kkk,cols+1
-jjj,iii); %numerator for cols right
Covariance_u_right(kkk,jjj,iii)=U_fluct(kkk,1,iii)*U_fluct(kkk,jjj,iii)
; %denominator for cols left Variance_u_left(kkk,jjj,iii)=(U_fluct(kkk,cols+1-
jjj,iii))^2; %denominator for cols right Variance_u_right(kkk,jjj,iii)=(U_fluct(kkk,jjj,iii))^2; %numerator for cols left
Covariance_v_left(kkk,jjj,iii)=V_fluct(kkk,cols,iii)*V_fluct(kkk,cols+1
-jjj,iii);

223
%numerator for cols right
Covariance_v_right(kkk,jjj,iii)=V_fluct(kkk,1,iii)*V_fluct(kkk,jjj,iii)
; %denominator for cols left Variance_v_left(kkk,jjj,iii)=(V_fluct(kkk,cols+1-
jjj,iii))^2; %denominator for cols right Variance_v_right(kkk,jjj,iii)=(V_fluct(kkk,jjj,iii))^2; %numerator for cols left
Covariance_uv_left(kkk,jjj,iii)=U_fluct(kkk,cols,iii)*V_fluct(kkk,cols+
1-jjj,iii); %numerator for cols right
Covariance_uv_right(kkk,jjj,iii)=U_fluct(kkk,1,iii)*V_fluct(kkk,jjj,iii
); %numerator for cols left
Covariance_vu_left(kkk,jjj,iii)=V_fluct(kkk,cols,iii)*U_fluct(kkk,cols+
1-jjj,iii); %numerator for cols right
Covariance_vu_right(kkk,jjj,iii)=V_fluct(kkk,1,iii)*U_fluct(kkk,jjj,iii
); end end end %find mean of matrices along all data sets Covariance_u_left_mean=mean(Covariance_u_left,3); Covariance_u_right_mean=mean(Covariance_u_right,3); Covariance_v_left_mean=mean(Covariance_v_left,3); Covariance_v_right_mean=mean(Covariance_v_right,3); Covariance_uv_left_mean=mean(Covariance_uv_left,3); Covariance_uv_right_mean=mean(Covariance_uv_right,3); Covariance_vu_left_mean=mean(Covariance_vu_left,3); Covariance_vu_right_mean=mean(Covariance_vu_right,3); Variance_u_left_mean=mean(Variance_u_left,3); Variance_u_right_mean=mean(Variance_u_right,3); Variance_v_left_mean=mean(Variance_v_left,3); Variance_v_right_mean=mean(Variance_v_right,3); %%HORIZONTAL correlation for kkk=1:rows for jjj=1:cols %calculate correlation coefficient all rows for columns left
Correlation_u_left(kkk,jjj)=Covariance_u_left_mean(kkk,jjj)/((Variance_
u_left_mean(kkk,1)*Variance_u_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns right
Correlation_u_right(kkk,jjj)=Covariance_u_right_mean(kkk,jjj)/((Varianc
e_u_right_mean(kkk,1)*Variance_u_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns left
Correlation_v_left(kkk,jjj)=Covariance_v_left_mean(kkk,jjj)/((Variance_
v_left_mean(kkk,1)*Variance_v_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns right
Correlation_v_right(kkk,jjj)=Covariance_v_right_mean(kkk,jjj)/((Varianc
e_v_right_mean(kkk,1)*Variance_v_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns left
Correlation_uv_left(kkk,jjj)=Covariance_uv_left_mean(kkk,jjj)/((Varianc
e_u_left_mean(kkk,1)*Variance_v_left_mean(kkk,jjj))^0.5);

224
%calculate correlation coefficient all rows for columns right
Correlation_uv_right(kkk,jjj)=Covariance_uv_right_mean(kkk,jjj)/((Varia
nce_u_right_mean(kkk,1)*Variance_v_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns left
Correlation_vu_left(kkk,jjj)=Covariance_vu_left_mean(kkk,jjj)/((Varianc
e_v_left_mean(kkk,1)*Variance_u_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient all rows for columns right
Correlation_vu_right(kkk,jjj)=Covariance_vu_right_mean(kkk,jjj)/((Varia
nce_v_right_mean(kkk,1)*Variance_u_right_mean(kkk,jjj))^0.5); end end %average all correlation coefficients Correlation_u_left_mean=mean(Correlation_u_left,1); Correlation_u_right_mean=mean(Correlation_u_right,1); Correlation_u_horiz_mean=(Correlation_u_left_mean+Correlation_u_right_m
ean)/2; %average all correlation coefficients Correlation_v_left_mean=mean(Correlation_v_left,1); Correlation_v_right_mean=mean(Correlation_v_right,1); Correlation_v_horiz_mean=(Correlation_v_left_mean+Correlation_v_right_m
ean)/2; %average all correlation coefficients Correlation_uv_left_mean=mean(Correlation_uv_left,1); Correlation_uv_right_mean=mean(Correlation_uv_right,1); Correlation_uv_horiz_mean=(Correlation_uv_left_mean+Correlation_uv_righ
t_mean)/2; %average all correlation coefficients Correlation_vu_left_mean=mean(Correlation_vu_left,1); Correlation_vu_right_mean=mean(Correlation_vu_right,1); Correlation_vu_horiz_mean=(Correlation_vu_left_mean+Correlation_vu_righ
t_mean)/2; %make vector with distances for vertical correlation delta_y=m_pixel*vector_spacing*(0:(rows-1)); %make vector with distances for best-fit vertical correlation delta_y_long=m_pixel*vector_spacing*(0:(4*rows-1)); %make vector with distances for horizontal correlation delta_x=m_pixel*vector_spacing*(0:(cols-1)); %make vector with distances for best-fit horizontal correlation delta_x_long=m_pixel*vector_spacing*(0:(4*cols-1)); %call function, compute vertical longitudinal best-fit correlation [R_v_vert]=Compute_double_exp_variables_vert(delta_y,
Correlation_v_vert_mean, rows, delta_y_long); %call function, compute horizontal vertical best-fit correlation [R_u_horiz]=Compute_double_exp_variables_horiz(delta_x,
Correlation_u_horiz_mean, cols, delta_x_long); Integral_length_vert_uu=0;%set integral lengthscales to zero to start Integral_length_vert_vv=0; Integral_length_horiz_uu=0; Integral_length_horiz_vv=0; % initialize, stops integration of curves if they go positive % after going negative stop_u=0; stop_v=0; %calculate vertical transverse lengthscales for i=1:rows

225
if Correlation_u_vert_mean(i,1) > 0 && stop_u==0 %sum up area under correlation curve
Integral_length_vert_uu = Integral_length_vert_uu +
Correlation_u_vert_mean(i,1)*delta_y(1,2); else %if curve goes above zero after negative, stop integration stop_u=1; end end %calculate vertical longitudinal lengthscales, uses best-fit for i=1:4*rows if R_v_vert(i,1) > 0 && stop_v==0 %sum up area under correlation curve
Integral_length_vert_vv =
Integral_length_vert_vv+R_v_vert(i,1)*delta_y_long(1,2); else %if curve goes above zero after negative, stop integration stop_v=1; end end %re-initialize, if curve goes above zero after negative, stop
integration stop_u=0; stop_v=0; %calculate horizontal transverse lengthscales for i=1:cols if Correlation_v_horiz_mean(1,i) > 0 && stop_v==0
Integral_length_horiz_vv = Integral_length_horiz_vv +
Correlation_v_horiz_mean(1,i)*delta_x(1,2); else %if curve goes above zero after negative, stop integration stop_v=1; end end %calculate horizontal longitudinal lengthscales, uses best-fit for i=1:4*cols if R_u_horiz(1,i) > 0 && stop_u==0
Integral_length_horiz_uu = Integral_length_horiz_uu +
R_u_horiz(1,i)*delta_x_long(1,2); else %if curve goes above zero after negative, stop integration stop_u=1; end end %change units from [m] to [mm] Integral_length_vert_vv=Integral_length_vert_vv*1e3; Integral_length_vert_uu=Integral_length_vert_uu*1e3; Integral_length_horiz_vv=Integral_length_horiz_vv*1e3; Integral_length_horiz_uu=Integral_length_horiz_uu*1e3;

226
E.5. MATLAB Code to Calculate the Correlation Lengthscales Using the Spatial-
Average Data, Double-Sided Correlation
This code uses the same code from the start of E.3. until line E.3. Reference 1.
%this part gets rid of edge effect from the fourier transform U_fluct_save=U_fluct; V_fluct_save=V_fluct; KE_fluct_save=KE_fluct; clear U_fluct V_fluct KE_fluct; U_fluct=U_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:); V_fluct=V_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:); KE_fluct=KE_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:); [rows cols]=size(U_fluct(:,:,1)); %read in the size of the matrix %--------------- %the VERTICAL correlation coefficient is now calculated as defined in %eqn. 3.93 of Pope's Turbulent Flows book %note: since rows is even, it doesn't calculate using the last row for iii=1:numb for jjj=1:cols for kkk=1:rows/2 %numerator for rows above middle row Covariance_u_above(kkk,jjj,iii) =
U_fluct(rows/2,jjj,iii)*U_fluct(rows/2+1-kkk,jjj,iii); %numerator for rows below middle row Covariance_u_below(kkk,jjj,iii) =
U_fluct(rows/2,jjj,iii)*U_fluct(rows/2-1+kkk,jjj,iii); %denominator for rows above middle row Variance_u_above(kkk,jjj,iii)=(U_fluct(rows/2+1-
kkk,jjj,iii))^2; %denominator for rows below middle row Variance_u_below(kkk,jjj,iii)=(U_fluct(rows/2-
1+kkk,jjj,iii))^2; %numerator for rows above middle row Covariance_v_above(kkk,jjj,iii) =
V_fluct(rows/2,jjj,iii)*V_fluct(rows/2+1-kkk,jjj,iii); %numerator for rows below middle row Covariance_v_below(kkk,jjj,iii) =
V_fluct(rows/2,jjj,iii)*V_fluct(rows/2-1+kkk,jjj,iii); %denominator for rows above middle row Variance_v_above(kkk,jjj,iii)=(V_fluct(rows/2+1-
kkk,jjj,iii))^2; %denominator for rows below middle row Variance_v_below(kkk,jjj,iii)=(V_fluct(rows/2-
1+kkk,jjj,iii))^2; %numerator for rows above middle row Covariance_uv_above(kkk,jjj,iii) =
U_fluct(rows/2,jjj,iii)*V_fluct(rows/2+1-kkk,jjj,iii); %numerator for rows below middle row

227
Covariance_uv_below(kkk,jjj,iii) =
U_fluct(rows/2,jjj,iii)*V_fluct(rows/2-1+kkk,jjj,iii); %numerator for rows above middle row Covariance_vu_above(kkk,jjj,iii) =
V_fluct(rows/2,jjj,iii)*U_fluct(rows/2+1-kkk,jjj,iii); %numerator for rows below middle row Covariance_vu_below(kkk,jjj,iii) =
V_fluct(rows/2,jjj,iii)*U_fluct(rows/2-1+kkk,jjj,iii); end end end %find mean of matrices along all data sets Covariance_u_above_mean=mean(Covariance_u_above,3); Covariance_u_below_mean=mean(Covariance_u_below,3); Covariance_v_above_mean=mean(Covariance_v_above,3); Covariance_v_below_mean=mean(Covariance_v_below,3); Covariance_uv_above_mean=mean(Covariance_uv_above,3); Covariance_uv_below_mean=mean(Covariance_uv_below,3); Covariance_vu_above_mean=mean(Covariance_vu_above,3); Covariance_vu_below_mean=mean(Covariance_vu_below,3); Variance_u_above_mean=mean(Variance_u_above,3); Variance_u_below_mean=mean(Variance_u_below,3); Variance_v_above_mean=mean(Variance_v_above,3); Variance_v_below_mean=mean(Variance_v_below,3); %%VERTICAL correlation for jjj=1:cols for kkk=1:rows/2 %calculate correlation coefficient for all columns for rows %above middle row Correlation_u_above(kkk,jjj) =
Covariance_u_above_mean(kkk,jjj)/((Variance_u_above_mean(1,jjj)*Varianc
e_u_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %below middle row Correlation_u_below(kkk,jjj) =
Covariance_u_below_mean(kkk,jjj)/((Variance_u_below_mean(1,jjj)*Varianc
e_u_below_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %above middle row Correlation_v_above(kkk,jjj) =
Covariance_v_above_mean(kkk,jjj)/((Variance_v_above_mean(1,jjj)*Varianc
e_v_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %below middle row Correlation_v_below(kkk,jjj) =
Covariance_v_below_mean(kkk,jjj)/((Variance_v_below_mean(1,jjj)*Varianc
e_v_below_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %above middle row Correlation_uv_above(kkk,jjj) =
Covariance_uv_above_mean(kkk,jjj)/((Variance_u_above_mean(1,jjj)*Varian
ce_v_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %below middle row
228
Correlation_uv_below(kkk,jjj) =
Covariance_uv_below_mean(kkk,jjj)/((Variance_u_below_mean(1,jjj)*Varian
ce_v_below_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %above middle row Correlation_vu_above(kkk,jjj) =
Covariance_vu_above_mean(kkk,jjj)/((Variance_v_above_mean(1,jjj)*Varian
ce_u_above_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all columns for rows %below middle row Correlation_vu_below(kkk,jjj) =
Covariance_vu_below_mean(kkk,jjj)/((Variance_v_below_mean(1,jjj)*Varian
ce_u_below_mean(kkk,jjj))^0.5); end end %average all correlation coefficients Correlation_u_above_mean=mean(Correlation_u_above,2); Correlation_u_below_mean=mean(Correlation_u_below,2); Correlation_u_vert_mean=(Correlation_u_above_mean+Correlation_u_below_m
ean)/2; %average all correlation coefficients Correlation_v_above_mean=mean(Correlation_v_above,2); Correlation_v_below_mean=mean(Correlation_v_below,2); Correlation_v_vert_mean=(Correlation_v_above_mean+Correlation_v_below_m
ean)/2; %average all correlation coefficients Correlation_uv_above_mean=mean(Correlation_uv_above,2); Correlation_uv_below_mean=mean(Correlation_uv_below,2); Correlation_uv_vert_mean=(Correlation_uv_above_mean+Correlation_uv_belo
w_mean)/2; %average all correlation coefficients Correlation_vu_above_mean=mean(Correlation_vu_above,2); Correlation_vu_below_mean=mean(Correlation_vu_below,2); Correlation_vu_vert_mean=(Correlation_vu_above_mean+Correlation_vu_belo
w_mean)/2; %the HORIZONTAL correlation coefficient is now calculated as defined %in eqn. 3.93 of Pope's Turbulent Flows book %note: since columns is even, it doesn't calculate using last column for iii=1:numb for kkk=1:rows for jjj=1:cols/2 %numerator for cols left of middle col Covariance_u_left(kkk,jjj,iii) =
U_fluct(kkk,cols/2,iii)*U_fluct(kkk,cols/2+1-jjj,iii); %numerator for cols right of middle col Covariance_u_right(kkk,jjj,iii) =
U_fluct(kkk,cols/2,iii)*U_fluct(kkk,cols/2-1+jjj,iii); %denominator for cols left of middle col Variance_u_left(kkk,jjj,iii)=(U_fluct(kkk,cols/2+1-
jjj,iii))^2; %denominator for cols right of middle col Variance_u_right(kkk,jjj,iii)=(U_fluct(kkk,cols/2-
1+jjj,iii))^2; %numerator for cols left of middle col

229
Covariance_v_left(kkk,jjj,iii) =
V_fluct(kkk,cols/2,iii)*V_fluct(kkk,cols/2+1-jjj,iii); %numerator for cols right of middle col Covariance_v_right(kkk,jjj,iii) =
V_fluct(kkk,cols/2,iii)*V_fluct(kkk,cols/2-1+jjj,iii); %denominator for cols left of middle col Variance_v_left(kkk,jjj,iii)=(V_fluct(kkk,cols/2+1-
jjj,iii))^2; %denominator for cols right of middle col Variance_v_right(kkk,jjj,iii)=(V_fluct(kkk,cols/2-
1+jjj,iii))^2; %numerator for cols left of middle col Covariance_uv_left(kkk,jjj,iii) =
U_fluct(kkk,cols/2,iii)*V_fluct(kkk,cols/2+1-jjj,iii); %numerator for cols right of middle col Covariance_uv_right(kkk,jjj,iii) =
U_fluct(kkk,cols/2,iii)*V_fluct(kkk,cols/2-1+jjj,iii); %numerator for cols left of middle col Covariance_vu_left(kkk,jjj,iii) =
V_fluct(kkk,cols/2,iii)*U_fluct(kkk,cols/2+1-jjj,iii); %numerator for cols right of middle col Covariance_vu_right(kkk,jjj,iii) =
V_fluct(kkk,cols/2,iii)*U_fluct(kkk,cols/2-1+jjj,iii); end end end %find mean of matrices along all data sets Covariance_u_left_mean=mean(Covariance_u_left,3); Covariance_u_right_mean=mean(Covariance_u_right,3); Covariance_v_left_mean=mean(Covariance_v_left,3); Covariance_v_right_mean=mean(Covariance_v_right,3); Covariance_uv_left_mean=mean(Covariance_uv_left,3); Covariance_uv_right_mean=mean(Covariance_uv_right,3); Covariance_vu_left_mean=mean(Covariance_vu_left,3); Covariance_vu_right_mean=mean(Covariance_vu_right,3); Variance_u_left_mean=mean(Variance_u_left,3); Variance_u_right_mean=mean(Variance_u_right,3); Variance_v_left_mean=mean(Variance_v_left,3); Variance_v_right_mean=mean(Variance_v_right,3); %%HORIZONTAL correlation for kkk=1:rows for jjj=1:cols/2 %calculate correlation coefficient for all rows for columns %left of middle col Correlation_u_left(kkk,jjj) =
Covariance_u_left_mean(kkk,jjj)/((Variance_u_left_mean(kkk,1)*Variance_
u_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %right of middle col Correlation_u_right(kkk,jjj) =
Covariance_u_right_mean(kkk,jjj)/((Variance_u_right_mean(kkk,1)*Varianc
e_u_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %left of middle col

230
Correlation_v_left(kkk,jjj) =
Covariance_v_left_mean(kkk,jjj)/((Variance_v_left_mean(kkk,1)*Variance_
v_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %right of middle col Correlation_v_right(kkk,jjj) =
Covariance_v_right_mean(kkk,jjj)/((Variance_v_right_mean(kkk,1)*Varianc
e_v_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %left of middle col Correlation_uv_left(kkk,jjj) =
Covariance_uv_left_mean(kkk,jjj)/((Variance_u_left_mean(kkk,1)*Variance
_v_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %right of middle col Correlation_uv_right(kkk,jjj) =
Covariance_uv_right_mean(kkk,jjj)/((Variance_u_right_mean(kkk,1)*Varian
ce_v_right_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %left of middle col Correlation_vu_left(kkk,jjj) =
Covariance_vu_left_mean(kkk,jjj)/((Variance_v_left_mean(kkk,1)*Variance
_u_left_mean(kkk,jjj))^0.5); %calculate correlation coefficient for all rows for columns %right of middle col Correlation_vu_right(kkk,jjj) =
Covariance_vu_right_mean(kkk,jjj)/((Variance_v_right_mean(kkk,1)*Varian
ce_u_right_mean(kkk,jjj))^0.5); end end %average all correlation coefficients Correlation_u_left_mean=mean(Correlation_u_left,1); Correlation_u_right_mean=mean(Correlation_u_right,1); Correlation_u_horiz_mean=(Correlation_u_left_mean+Correlation_u_right_m
ean)/2; %average all correlation coefficients Correlation_v_left_mean=mean(Correlation_v_left,1); Correlation_v_right_mean=mean(Correlation_v_right,1); Correlation_v_horiz_mean=(Correlation_v_left_mean+Correlation_v_right_m
ean)/2; %average all correlation coefficients Correlation_uv_left_mean=mean(Correlation_uv_left,1); Correlation_uv_right_mean=mean(Correlation_uv_right,1); Correlation_uv_horiz_mean=(Correlation_uv_left_mean+Correlation_uv_righ
t_mean)/2; %average all correlation coefficients Correlation_vu_left_mean=mean(Correlation_vu_left,1); Correlation_vu_right_mean=mean(Correlation_vu_right,1); Correlation_vu_horiz_mean=(Correlation_vu_left_mean+Correlation_vu_righ
t_mean)/2; %make vector with distances from the center of vertical correlation delta_y=m_pixel*vector_spacing*(0:(rows/2-1)); %make vector with distances for best-fit vertical correlation delta_y_long=m_pixel*vector_spacing*(0:(4*rows-1)); %make vector with distances from the center of horizontal correlation

231
delta_x=m_pixel*vector_spacing*(0:(cols/2-1)); %make vector with distances for best-fit horizontal correlation delta_x_long=m_pixel*vector_spacing*(0:(4*cols-1)); %call function, compute vertical longitudinal correlation best-fit [R_v_vert]=Compute_double_exp_variables_vert_cycle_resolved(delta_y,
Correlation_v_vert_mean, rows, delta_y_long); %call function, compute horizontal longitudinal correlation best-fit [R_u_horiz]=Compute_double_exp_variables_horiz_cycle_resolved(delta_x,
Correlation_u_horiz_mean, cols, delta_x_long); Integral_length_vert_uu=0; %set integral lengths to zero to start Integral_length_vert_vv=0; Integral_length_horiz_uu=0; Integral_length_horiz_vv=0; %initialize, this stops the integration of the curves if they go %positive after going negative stop_u=0; stop_v=0; %calculate vertical lengthscales summing area only if correlation
positive for i=1:rows/2 if Correlation_u_vert_mean(i,1) > 0 && stop_u==0 %sum up area under correlation curve Integral_length_vert_uu = Integral_length_vert_uu +
Correlation_u_vert_mean(i,1)*delta_y(1,2); else %in case calculated curve goes above zero after going negative, %stop integration stop_u=1; end end for i=1:4*rows if R_v_vert(i,1) > 0 && stop_v==0 %sum up area under best-fit correlation curve Integral_length_vert_vv = Integral_length_vert_vv +
R_v_vert(i,1)*delta_y_long(1,2); else %in case calculated curve goes about zero after going negative, %stop integration stop_v=1; end end %re-initialize, this stops the integration of the curves if they go %positive after going negative stop_u=0; stop_v=0; %calculate horizontal lengthscales, sum area only if correlation
positive for i=1:cols/2 if Correlation_v_horiz_mean(1,i) > 0 && stop_v==0 %sum up area under correlation curve Integral_length_horiz_vv = Integral_length_horiz_vv +
Correlation_v_horiz_mean(1,i)*delta_x(1,2); else %in case the calculated curve goes about zero after going % negative, stop integration

232
stop_v=1; end end for i=1:4*cols if R_u_horiz(1,i) > 0 && stop_u==0 %sum up area under best-fit correlation curve Integral_length_horiz_uu = Integral_length_horiz_uu +
R_u_horiz(1,i)*delta_x_long(1,2); else %in case the calculated curve goes about zero after going % negative, stop integration stop_u=1; end end %change units from [m] to [mm] Integral_length_vert_vv=Integral_length_vert_vv*1e3; Integral_length_vert_uu=Integral_length_vert_uu*1e3; Integral_length_horiz_vv=Integral_length_horiz_vv*1e3; Integral_length_horiz_uu=Integral_length_horiz_uu*1e3; Int_lengthscale_vector(loop,:)=[L_cut, Integral_length_vert_vv,
Integral_length_vert_uu, Integral_length_horiz_uu,
Integral_length_horiz_vv]; loop=loop+1; %increase loop counter end Int_lengthscale_vector %print lengthscales to screen
E.6. MATLAB Code to Calculate the Energy Spectra Using the Ensemble Average
Data
This code uses the same code from the start of E.2. until line E.2. Reference 2.
%calculate the turbulent kinetic energy, since I only have 2D velocity
field, I assume isotropy and multiply by 3/2 to get the 3rd dimension
Turb_kinetic_energy=(1/2)*mean(mean(Fluct_mean_good))*(3/2);
%calculates u fluctuating velocity mean squared for Pope, eqn. 6.225 U_fluct_squared_mean=mean(mean(U_fluct_mean_good)); %calculates v fluctuating velocity mean squared for Pope, eqn. 6.225 V_fluct_squared_mean=mean(mean(V_fluct_mean_good)); %read in the size of the fluctuating KE matrix [rows cols]=size(KE_fluct(:,:,1)); %the next loop checks if the number of rows is even, and drops the %last row if the number is odd, this allows for correct plotting of %k vs. E later in the code test=rows/2; test2=round(test); if test~=test2

233
%reset the size of matrices if a row is subtracted KE_fluct=KE_fluct(1:(rows-1),:,:); U_fluct=U_fluct(1:(rows-1),:,:); V_fluct=V_fluct(1:(rows-1),:,:); [rows cols]=size(KE_fluct(:,:,1)); end %the next loop checks if the number of rows is even, and drops the %last row if the number is odd, this allows for correct plotting of %k vs. E later in the code test3=cols/2; test4=round(test3); if test3~=test4 %reset the size of matrices if a column is subtracted KE_fluct=KE_fluct(:,1:(cols-1),:); U_fluct=U_fluct(:,1:(cols-1),:); V_fluct=V_fluct(:,1:(cols-1),:); [rows cols]=size(KE_fluct(:,:,1)); End
----E.6. Reference 1---- %%VERTICAL energy spectra kappa=2*pi/(m_pixel*vector_spacing); %kappa equals 2*pi divided by L %creates kappa vector with wavenumbers from zero to kappa/2 k_vert=kappa*(0:(rows/2))/(rows); k_vert=k_vert'; %change k into a column vector for i=1:cols-1 %note: can't find FT_second when i=cols for j=1:numb %fourier transform two adjacent rows which extends the dynamic %range and removes noise when the energy spectrum is calculated FT_first(:,i,j)=fft(KE_fluct(:,i,j),rows); FT_second(:,i,j)=fft(KE_fluct(:,i+1,j),rows); %vertical energy spectrum E(:,i,j)=(FT_first(:,i,j).*conj(FT_second(:,i,j))); end end %finds the mean energy spectrum at each wavenumber and for each image E_vert_mean=mean(mean(E,3),2); %normalize by the second value, the first we ignore due to noise, find %minumum SSE by matching to this point E_vert_mean_max=real(E_vert_mean(2,1)); E_vert_mean_norm=real(E_vert_mean(1:(rows/2+1),1)/E_vert_mean_max); %%HORIZONTAL energy spectra %creates kappa vector with wavenumbers from zero to kappa/2 k_horiz=kappa*(0:(cols/2))/(cols); for i=1:rows-1 %note: can't find FT_second when i=rows for j=1:numb %fourier transform two adjacent rows which extends the dynamic %range and removes noise when the energy spectrum is calculated FT_first_horiz(i,:,j)=fft(KE_fluct(i,:,j),cols); FT_second_horiz(i,:,j)=fft(KE_fluct(i+1,:,j),cols); %horizontal energy spectrum E_horiz(i,:,j) =
(FT_first_horiz(i,:,j).*conj(FT_second_horiz(i,:,j))); end end %finds the mean energy spectrum at each wavenumber and for each image

234
E_horiz_mean=mean(mean(E_horiz,3),1); %normalize by the second value, the first we ignore due to noise, find %minumum SSE by matching to this point E_horiz_mean_max=real(E_horiz_mean(1,2)); E_horiz_mean_norm=real(E_horiz_mean(1,1:(cols/2+1))/E_horiz_mean_max); %-----VERTICAL--------------------- %call function to compute Pope's model spectrum [E1_vert, k1_vert, Re_min_vert, L11_vert, L_vert, eta_vert,
k_model_vert]=Compute_model_1D_Evert_spectrum(Turb_kinetic_energy,
E_vert_mean_norm, k_vert, V_fluct_squared_mean); %non-dimensionalize spectra using Kolmogorov scales, see Pope, p.235 %rate of dissipation, Pope, p. 200, eqn. 6.59 dissipation_vert=(Turb_kinetic_energy^2)/(Re_min_vert*nu); E_vert_Pope_norm=(dissipation_vert*nu^5)^(1/4); %non-dimensionalize measured spectrum E_vert_mean_norm=E_vert_mean_norm*(E_vert_mean_max/E_vert_Pope_norm); %non-dimensionalize Pope spectrum E1_vert=E1_vert*(E_vert_mean_max/E_vert_Pope_norm); %non-dimensionalize measured wavenumber k_eta_vert=k_vert*eta_vert; %non-dimensionalize Pope wavenumber k1_eta_vert=k1_vert*eta_vert; k_vert=k_vert./(1e6); %change units from rad/m to rad/um k1_vert=k1_vert./(1e6); %change units from rad/m to rad/um eta_vert=eta_vert*1e6; %change units from [m] to [um] L11_vert=L11_vert*1e3; %change units from [m] to [mm] L_vert=L_vert*1e3; %change units from [m] to [mm] line_53=(5e6)*k_eta_vert.^(-5/3); %-5/3 slope line for plotting %-----HORIZONTAL---------------------
%call function to compute Pope's model spectrum [E1_horiz, k1_horiz, Re_min_horiz, L11_horiz, L_horiz, eta_horiz,
k_model_horiz]=Compute_model_1D_Ehoriz_spectrum(Turb_kinetic_energy,
E_horiz_mean_norm, k_horiz, U_fluct_squared_mean); %non-dimensionalize spectra using Kolmogorov scales, see Pope, p.235 %rate of dissipation, Pope, p. 200, eqn. 6.59 dissipation_horiz=(Turb_kinetic_energy^2)/(Re_min_horiz*nu); E_horiz_Pope_norm=(dissipation_horiz*nu^5)^(1/4); %non-dimensionalize measured spectrum E_horiz_mean_norm=E_horiz_mean_norm*(E_horiz_mean_max/E_horiz_Pope_norm
); %non-dimensionalize Pope spectrum E1_horiz=E1_horiz*(E_horiz_mean_max/E_horiz_Pope_norm); %non-dimensionalize measured wavenumber k_eta_horiz=k_horiz*eta_horiz; %non-dimensionalize Pope wavenumber k1_eta_horiz=k1_horiz*eta_horiz; k_horiz=k_horiz./(1e6); %change units from rad/m to rad/um k1_horiz=k1_horiz./(1e6); %change units from rad/m to rad/um eta_horiz=eta_horiz*1e6; %change units from [m] to [um] L11_horiz=L11_horiz*1e3; %change units from [m] to [mm] L_horiz=L_horiz*1e3; %change units from [m] to [mm] line_horiz_53=(2e7)*k_eta_horiz.^(-5/3); %-5/3 slope line for plotting %print to screen
235
Int_lengthscale_vector=[L11_vert, eta_vert, V_fluct_squared_mean,
k_model_vert, L11_horiz, eta_horiz, U_fluct_squared_mean,
k_model_horiz, Turb_kinetic_energy] Int_lengthscale_vector_2=[Re_min_vert, Re_min_horiz]
E.7. MATLAB Code to Calculate the Energy Spectra Using the Spatial-Average
Data
This code uses the same code from the start of E.3. until line E.3. Reference 2. At
the end of the E.7 code below, it continues to use the code starting at E.6. Reference 1.
%calculates the mean at each vector location Fluct_squared_mean=mean(Fluct_squared,3); U_fluct_squared_mean=mean(U_fluct_squared,3); V_fluct_squared_mean=mean(V_fluct_squared,3); U_fluct_squared_mean_sum=0; V_fluct_squared_mean_sum=0; Fluct_squared_mean_sum=0; total_count=0; %initialize %this loop gets rid of data with the edge effects for i=(omit_row_col+1):(rows-omit_row_col) for j=(omit_row_col+1):(cols-omit_row_col) U_fluct_squared_mean_sum = U_fluct_squared_mean_sum +
U_fluct_squared_mean(i,j); V_fluct_squared_mean_sum = V_fluct_squared_mean_sum +
V_fluct_squared_mean(i,j); Fluct_squared_mean_sum = Fluct_squared_mean_sum +
Fluct_squared_mean(i,j); total_count=total_count+1; end end %calculates u fluctuating velocity mean squared for Pope, eqn. 6.225 U_fluct_squared_mean=U_fluct_squared_mean_sum/total_count; %calculates v fluctuating velocity mean squared for Pope, eqn. 6.225 V_fluct_squared_mean=V_fluct_squared_mean_sum/total_count; %calculate the turbulent kinetic energy, since I only have 2D velocity %field, I assume isotropy and multiply by 3/2 to get the 3rd dimension Turb_kinetic_energy=(1/2)*(Fluct_squared_mean_sum/total_count)*(3/2); %this part gets rid of edge effect from the fourier transform U_fluct_save=U_fluct; V_fluct_save=V_fluct; KE_fluct_save=KE_fluct; clear U_fluct V_fluct KE_fluct; U_fluct=U_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:);
V_fluct=V_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:);

236
KE_fluct=KE_fluct_save((omit_row_col+1):(rows-
omit_row_col),(omit_row_col+1):(cols-omit_row_col),:); [rows cols]=size(U_fluct(:,:,1)); %read in the size of the matrix
E.8. MATLAB Function to Calculate the Pope 1-D Model Spectrum in the
Horizontal Direction
This function is called by the code in E.6. The vertical direction analysis is the
same, but the variable names are changed to designate the vertical direction.
function [E1_horiz, k1_horiz, Re_min_horiz, L11_horiz, L, eta,
k_model_horiz]=Compute_model_1D_Ehoriz_spectrum(Turb_kinetic_energy,
E_horiz_mean_norm, k_horiz, U_fluct_squared_mean) %use the golden search method to find Re # that that minimizes %the SSE between the E11 curves, this bracketing method follows %the UCSD MAE290A course materials book, p.51 Re1=1; Re3=10000; %initial bounds set for bracket on Reynolds # Re_tol=5; %set tolerance for Reynolds number evals=0; %interation loop counter initialization Z=sqrt(5)-2; %initialize golden section ratio Re2=Re1+(Re3-Re1)*0.381966; %set Re2 for golden ratio %function calls [c_L1]=Compute_model_1D_c_L(Re1, Turb_kinetic_energy); [SSE1]=Compute_model_1D_Ehoriz_SSE(Re1, c_L1, Turb_kinetic_energy,
E_horiz_mean_norm, k_horiz); [c_L2]=Compute_model_1D_c_L(Re2, Turb_kinetic_energy); [SSE2]=Compute_model_1D_Ehoriz_SSE(Re2, c_L2, Turb_kinetic_energy,
E_horiz_mean_norm, k_horiz); [c_L3]=Compute_model_1D_c_L(Re3, Turb_kinetic_energy); [SSE3]=Compute_model_1D_Ehoriz_SSE(Re3, c_L3, Turb_kinetic_energy,
E_horiz_mean_norm, k_horiz); %computes the min SSE, which is SSE2(Re2) (between Re1 and Re3) %c_L is also found such that TKE matches the model while (abs(Re3-Re1) > Re_tol) Re4 = Re2+Z*(Re3-Re1); %compute the new Re4 %function calls [c_L4]=Compute_model_1D_c_L(Re4, Turb_kinetic_energy); [SSE4]=Compute_model_1D_Ehoriz_SSE(Re4, c_L4,
Turb_kinetic_energy, E_horiz_mean_norm, k_horiz); evals=evals+1; %loop counter if (SSE4>SSE2) Re3=Re1; SSE3=SSE1; c_L3=c_L1; %center new triplet on x2 %Re2=Re2; SSE2=SSE2; Re1=Re4; SSE1=SSE4; c_L1=c_L4; else

237
Re1=Re2; SSE1=SSE2; c_L1=c_L2; %center new triplet on x2 %Re3=Re3; SSE3=SSE3; Re2=Re4; SSE2=SSE4; c_L2=c_L4; end end Re_min_horiz=Re2; %Reynolds number that minimizes the SSE is Re2 %constants for Pope's spectrum, p.233 & p.232 c_L=c_L2 c_eta=0.4; C=1.5; p_0=2.0; beta=5.2; %note: c_eta=0.4 is high Re# limit. Though, choosing c_eta such %that dissipation matches model changes final Re#, lengthscales %by about 1%, so separate function call not created. %note: easier if nu passed from original file %[m^2/s], large engine, kinematic viscosity of air at 720K, 1612kPa nu=4.25e-6; %[m^2/s], small engine, kinematic viscosity of air at 708K, 1523kPa %nu=4.50e-6; k1=[1e1:1e1:1e5]'; %initialize k1 vector, column vector k1min=min(k1); %find min of k1 k1max=max(k1); %find max of k1 imax_1=int32(max(size(k1))); %number of elements in k1 vector %high resolution k vector for integration k=(k1min:k1min/10:1.1*k1max)'; imax=int32(max(size(k))); %number of elements in k vector % initialize for speed f_L=ones(imax,1); f_eta=ones(imax,1); E=ones(imax,1);
D=ones(imax,1); %definition of turbulence Reynolds number, Pope, p.200, eqn. 6.59 L=Re_min_horiz*nu/(sqrt(Turb_kinetic_energy)); eta=L*(Re_min_horiz^(-3/4)); %Pope, p. 200, eqn. 6.61 kL=k*L; %compute k*L and k*eta for use in f_L and f_eta kn=k*eta; for i=1:imax %Pope, p. 232, eqn. 6.247 f_L(i)=(kL(i)/(sqrt((kL(i)^2+c_L))))^(5.0/3.0+p_0); %Pope, p. 233, eqn. 6.248 f_eta(i)=exp(-beta*(sqrt(sqrt((kn(i)^4+c_eta^4)))-c_eta)); %Pope, p. 232, eqn. 6.246 E(i)=C*(nu^2)*(eta^(-8.0/3.0))*(k(i)^(-
5.0/3.0))*f_L(i)*f_eta(i); end E1=ones(imax_1,1); % initialize for speed for index=1:imax_1 %returns first entry location indice that is greater than %k_horiz, k1 is ignored in the integral since its value is zero k_index=int32(find(k > k1(index),1)); integrand=zeros(imax,1); % initialize for speed for j=k_index:imax %Pope, p. 226, eqn. 6.216 integrand(j)=(E(j)/k(j))*(1-k1(index)^2/k(j)^2); end %simple integration by rectangles E1(index)=sum(integrand)*(k(2)-k(1)); clear integrand;

238
end %this next line finds the indice of the k1 that is nearest to the %k_horiz value that was used to normalize this vector E_index_norm=int32(find(k1 > k_horiz(1,2),1))-1; %normalize vector by E1 at the location that E_horiz_mean_norm %was normalized E1=E1./E1(E_index_norm,1); E1_horiz=E1; k1_horiz=k1; %this next part calculates L_11 from Pope, p. 228, eqn. 6.225 L_integrand=zeros(imax,1); % initialize for speed for j=1:imax L_integrand(j)=(E(j)/k(j)); %Pope, p. 228, eqn. 6.225 k_sum_horiz(j)=E(j); %Pope, p. 222, eqn. 6.190 end %simple integration by rectangles L11_horiz=(0.5*pi/U_fluct_squared_mean)*sum(L_integrand)*(k(2)-
k(1)); k_model_horiz=sum(k_sum_horiz)*(k(2)-k(1)); end
E.9. MATLAB Function to Calculate the Sum Squared Error Between the
Measured Spectra and Pope 1-D Model Spectrum in the Horizontal Direction
This function is called by the code in E.8. The vertical direction analysis is the
same, but the variable names are changed to designate the vertical direction.
function [SSE_sum]=Compute_model_1D_Ehoriz_SSE(Re, c_L,
Turb_kinetic_energy, E_horiz_mean_norm, k_horiz) %constants for Pope's spectrum, p.233 & p.232 c_eta=0.4; C=1.5; p_0=2.0; beta=5.2; %note: c_eta=0.4 is high Re# limit. Though, choosing c_eta such %that dissipation matches model changes final Re#, lengthscales %by about 1%, so separate function call not created. %note: easier if nu passed from original file %[m^2/s], large engine, kinematic viscosity of air at 720K, 1612kPa nu=4.25e-6; %[m^2/s], small engine, kinematic viscosity of air at 708K, 1523kPa %nu=4.50e-6; %only compute the model spectra at the points I want to compute the %SSE, units are [rad/m] k1=k_horiz(1,2:20); k1=k1'; %convert to column vector k1min=min(k1); %find min of k1

239
imax_1=int32(max(size(k1))); %number of elements in k1 vector %high resolution k vector for integration, units [rad/m] k=(k1min:k1min/10:1e6)'; imax=int32(max(size(k))); %number of elements in k vector % initialize for speed f_L=ones(imax,1); f_eta=ones(imax,1); E=ones(imax,1); %definition of turbulence Reynolds number, Pope, p.200, eqn. 6.59 L=Re*nu/(sqrt(Turb_kinetic_energy)); eta=L*(Re^(-3/4)); %Pope, p. 200, eqn. 6.61 kL=k*L; %compute k*L and k*eta for use in f_L and f_eta kn=k*eta; for i=1:imax %Pope, p. 232, eqn. 6.247 f_L(i)=(kL(i)/(sqrt((kL(i)^2+c_L))))^(5.0/3.0+p_0); %Pope, p. 233, eqn. 6.248 f_eta(i)=exp(-beta*(sqrt(sqrt((kn(i)^4+c_eta^4)))-c_eta)); %Pope, p. 232, eqn. 6.246 E(i)=C*(nu^2)*(eta^(-8.0/3.0))*(k(i)^(-
5.0/3.0))*f_L(i)*f_eta(i); end E1=ones(imax_1,1); % initialize for speed for index=1:imax_1 k_index=int32(find(k > k1(index),1)); integrand=zeros(imax,1); % initialize for speed for j=k_index:imax %Pope, p. 226, eqn. 6.216 integrand(j)=(E(j)/k(j))*(1-k1(index)^2/k(j)^2); end %simple integration by rectangles E1(index)=sum(integrand)*(k(2)-k(1)); clear integrand; end E1=E1./(E1(1,1)); %normalize vector E1_horiz=E1; k1_horiz=k1; clear k1 E1 k; %now compute the SSE SSE_sum=0; %initialize the sum of SSE for i=1:imax_1 %compute sum squared error, ignore first point of %E_horiz_mean_norm SSE_sum=SSE_sum+(1e5)*(real(E1_horiz(i,1))-
real(E_horiz_mean_norm(1,i+1)))^2; end end
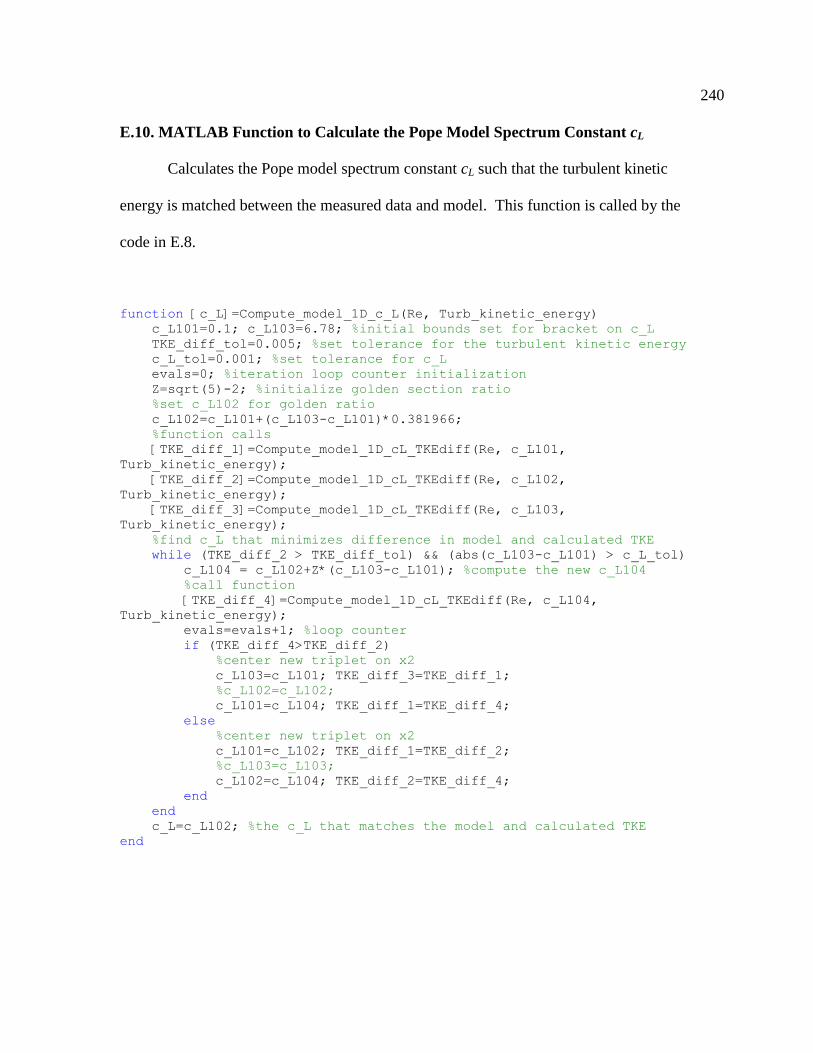
240
E.10. MATLAB Function to Calculate the Pope Model Spectrum Constant cL
Calculates the Pope model spectrum constant cL such that the turbulent kinetic
energy is matched between the measured data and model. This function is called by the
code in E.8.
function [c_L]=Compute_model_1D_c_L(Re, Turb_kinetic_energy) c_L101=0.1; c_L103=6.78; %initial bounds set for bracket on c_L TKE_diff_tol=0.005; %set tolerance for the turbulent kinetic energy c_L_tol=0.001; %set tolerance for c_L evals=0; %iteration loop counter initialization Z=sqrt(5)-2; %initialize golden section ratio
%set c_L102 for golden ratio c_L102=c_L101+(c_L103-c_L101)*0.381966; %function calls [TKE_diff_1]=Compute_model_1D_cL_TKEdiff(Re, c_L101,
Turb_kinetic_energy); [TKE_diff_2]=Compute_model_1D_cL_TKEdiff(Re, c_L102,
Turb_kinetic_energy); [TKE_diff_3]=Compute_model_1D_cL_TKEdiff(Re, c_L103,
Turb_kinetic_energy); %find c_L that minimizes difference in model and calculated TKE while (TKE_diff_2 > TKE_diff_tol) && (abs(c_L103-c_L101) > c_L_tol) c_L104 = c_L102+Z*(c_L103-c_L101); %compute the new c_L104 %call function [TKE_diff_4]=Compute_model_1D_cL_TKEdiff(Re, c_L104,
Turb_kinetic_energy); evals=evals+1; %loop counter if (TKE_diff_4>TKE_diff_2)
%center new triplet on x2 c_L103=c_L101; TKE_diff_3=TKE_diff_1; %c_L102=c_L102; c_L101=c_L104; TKE_diff_1=TKE_diff_4; else
%center new triplet on x2 c_L101=c_L102; TKE_diff_1=TKE_diff_2; %c_L103=c_L103; c_L102=c_L104; TKE_diff_2=TKE_diff_4; end end c_L=c_L102; %the c_L that matches the model and calculated TKE end

241
E.11. MATLAB Function for Calculating the Difference in the Turbulent Kinetic
Energy
This function calculates the difference in the turbulent kinetic energy between the
measured and Pope model spectrum for a given cL and turbulence Reynolds number.
This function is called by the code in E.10.
function [TKE_diff]=Compute_model_1D_cL_TKEdiff(Re, c_L,
Turb_kinetic_energy) c_eta=0.4; C=1.5; p_0=2.0; beta=5.2; %note: c_eta=0.4 is high Re# limit. Though, choosing c_eta such %that dissipation matches model changes final Re#, lengthscales %by about 1%, so separate function call not created. %[m^2/s], large engine, kinematic viscosity of air at 720K, 1612kPa nu=4.25e-6; %[m^2/s], small engine, kinematic viscosity of air at 708K, 1523kPa %nu=4.50e-6; k1=[1e1:1e1:1e5]'; %initialize k1 vector, column vector k1min=min(k1); %find min of k1 k1max=max(k1); %find max of k1 imax_1=int32(max(size(k1))); %number of elements in k1 vector
%high resolution k vector for integration k=(k1min:k1min/10:1.1*k1max)'; imax=int32(max(size(k))); %number of elements in k vector % initialize for speed f_L=ones(imax,1); f_eta=ones(imax,1); E=ones(imax,1); %definition of turbulence Reynolds number, Pope, p.200, eqn. 6.59 L=Re*nu/(sqrt(Turb_kinetic_energy)); eta=L*(Re^(-3/4)); %Pope, p. 200, eqn. 6.61 kL=k*L; %compute k*L and k*eta for use in f_L and f_eta kn=k*eta; for i=1:imax %Pope, p. 232, eqn. 6.247 f_L(i)=(kL(i)/(sqrt((kL(i)^2+c_L))))^(5.0/3.0+p_0); %Pope, p. 233, eqn. 6.248 f_eta(i)=exp(-beta*(sqrt(sqrt((kn(i)^4+c_eta^4)))-c_eta)); %Pope, p. 232, eqn. 6.246 E(i)=C*(nu^2)*(eta^(-8.0/3.0))*(k(i)^(-
5.0/3.0))*f_L(i)*f_eta(i); end %Pope, p. 222, eqn. 6.190 Turb_kinetic_energy_model=(sum(E))*(k(2)-k(1)); %calculate difference between model and measured TKE TKE_diff=abs(Turb_kinetic_energy_model-Turb_kinetic_energy); end





























