Embed Size (px)
Citation preview

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
1
Theory and Experiment on an Optimal Carrier
Frequency of a Modular Multilevel Cascade
Converter With Phase-Shifted PWMFirman Sasongko, Student Member, IEEE, Kei Sekiguchi, Kota Oguma, Makoto Hagiwara, Member, IEEE,
and Hirofumi Akagi, Fellow, IEEE
Abstract—This paper provides theoretical and experimentaldiscussions on an optimal carrier frequency for a phase-shiftedPWM modular multilevel cascade converter for grid connections.The discussions conclude that the ratio of the optimal carrierfrequency with respect to the supply (ac) frequency is 5/2. Athree-phase downscaled front-to-front (FTF) system is designed,constructed, and tested to confirm the theoretical discussion. Itconsists of a pair of three-phase modular multilevel cascadeconverters rated at 400 Vdc and 10 kW, where the carrierfrequency is set to 450 Hz and the ac frequency to 180 Hz, thatis, their ratio is equal to 5/2. Moreover, simulated waveformsare compared to experimental ones under the same operatingconditions. Both experimental and simulated waveforms agreewell with each other not only in steady states but also in transientstates.
Index Terms—Front-to-front systems, grid connections, mod-ular multilevel cascade converters, phase-shifted-carrier PWM.
I. INTRODUCTION
The modular multilevel cascade converter based on double-
star chopper cells (MMCC-DSCC) has been expected as a
high-voltage, high-power ac-to-dc and/or dc-to-ac converter
in the MMCC family [1]. This paper refers to it as a DSCC
converter for clearly distinguishing it from the other family
members. It is the same in circuit configuration as the modular
multilevel converter (MMC) for grid connections and traction
applications [2]–[4]. Comprehensive research activities on
DSCC converters for grid connections and motor drives have
been going on with focus on modeling, modulation, control,
simulation, and experiment [2]–[32]. However, a large number
of papers have confirmed validity by computer simulation
although a small number of papers have verified it by ex-
periment.
Pioneering papers at the beginning of research on DSCC
converters or before recent booming paper publications can
be divided into the following two groups: One is based on the
so-called “voltage-sorting algorithm,” relying on a nonlinear
discrete model [2]–[4]. Although experimental voltage and
current waveforms of a submodule in a 2-MW MMC were
F. Sasongko, K. Oguma, M. Hagiwara, and H. Akagi arewith the Department of Electrical and Electronic Engineering,Tokyo Institute of Technology, 152-8552 Tokyo, Japan (e-mail: [email protected]; [email protected];[email protected]; [email protected]).
K. Sekiguchi is with Toshiba Corporation, Tokyo, Japan (e-mail:[email protected]).
presented, no experimental waveform of the whole MMC
was presented at the time [3], [4]. The other is characterized
by closed-loop control of the “circulating current” defined
uniquely from the positive-arm and negative-arm currents. It
is based on a linear continuous model that allows the use
of phase-shifted-carrier pulsewidth modulation (PWM), and is
supported by experimental waveforms obtained from a single-
phase DSCC converter with two chopper cells per arm [5],
[6].
From a viewpoint of “control” in a broad sense, suit-
able modulation techniques and capacitor-voltage-balancing
methods are mandatory for stable and proper operation of
DSCC converters. Modulation techniques can be categorized
into carrier-based PWM and non-carrier-based or programmed
PWM [13]–[31]. The carrier-based PWM mostly uses ei-
ther phase-shifted carriers [16]–[18] or level-shifted carriers
[19]–[22]. The phase-shifted PWM results in better overall
performance than the level-shifted PWM [23], [24]. Non-
carrier-based modulation includes selective harmonic elimina-
tion (SHE) technique [22], [27], nearest level control (NLC)
modulation technique [28]–[31], and averaging or submod-
ule unified PWM (SUPWM) [25]. However, manufacturers
prefer the matured and simple carrier-based PWM to the
other modulation techniques that may produce lower switching
frequencies but usually at the expense of more complex
implementation [13].
As for capacitor-voltage balancing, the voltage-sorting al-
gorithm takes in all the capacitor voltages and the polarity of
the current within an arm, and then selects the best appropriate
submodules in each arm, and keeps the state until the next
switching transition process [2]–[4]. This method may make
capacitor-voltage-balancing strategy simple. This would be
a main reason why many research scientists combine vari-
ous modulation techniques with the voltage-sorting algorithm
[18]–[22], [25]–[32]. However, actual switching frequencies
of all the submodules depend on operating conditions, circuit
parameters, and control gains. This results in the difficulty
of keeping the actual switching frequencies constant and
equal. On the other hand, the closed-loop control combined
with phase-shifted-carrier PWM makes the actual switching
frequency of all the chopper cells equal to the carrier frequency
[5], [6]. This equal switching frequency is independent of
operating conditions, circuit parameters, or control gains,
leading to easy thermal design of gate-commutated thyristors
(GCTs) or insulated gate-bipolar transistors (IGBTs) and their
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
2
heat sinks. Moreover, the phase-shifted-carrier PWM brings
easy extension of the chopper-cell count per arm to controller
implementation.
Recently, the authors of [16] have provided harmonic anal-
ysis of the capacitor current in a passively-loaded MMC
with phase-shifted-carrier PWM. The analysis is confirmed
by experimental results of a single-phase MMC with five
submodules per arm. It is concluded that the carrier frequency
in a range of 100 to 200 Hz should not be an integer multiple
of a fundamental frequency of 50 Hz, so as to prevent the mean
dc voltage of each capacitor from diverging. However, no
discussion has been provided on an optimal carrier frequency
for each submodule, and no attention has been paid to the
individual balancing control playing an important role in
regulating the mean dc voltage of each capacitor.
This paper lays emphasis on theoretical and experimental
discussions on an optimal carrier frequency for a three-phase
DSCC converter with phase-shifted-carrier PWM. The ratio
of the carrier frequency with respect to the supply frequency
should be set as low as possible because the DSCC converter
is intended for high-voltage and high-power applications.
This paper provides mathematical analysis of the power flow
formed by the arm current and the arm-side voltage of each
chopper cell under reasonable assumptions. As a result, this
paper concludes that an optimal ratio of the carrier frequency
with respect to the supply frequency is 5/2.
The validity of the mathematical analysis is confirmed by
the results obtained from experiment and computer simula-
tion. This paper designs, constructs, and tests a three-phase
downscaled DSCC-based FTF system rated at 400 Vdc and
10 kW to verify the optimal frequency ratio of 5/2, where
the carrier frequency is 450 Hz, and the ac-link frequency
is 180 Hz. Experiments are also carried out with the same
carrier frequency as 450 Hz but at different ac-link frequency
of 112.5 Hz, where the frequency ratio is 4/1. Moreover, this
paper includes simulated waveforms under the same circuit
parameters and control gains as the experimental ones. The
experimental and simulated waveforms show stable operation
and agree well with each other even in dynamic and transient
operating conditions, thus resulting in enhancing the reliability
and validity of both experiment and simulation.
II. SYSTEM CONFIGURATION OF A DSCC CONVERTER
A. Circuit Configuration and Per-Leg Circulating Current
Fig. 1 shows the circuit configuration of a three-phase
DSCC converter consisting of N series-connected chopper
cells and a center-tapped inductor LZ for each phase leg.
The line-to-neutral voltage at the ac terminal of the DSCC
converter is a PWM waveform with N+1 levels in maximum,
and the line-to-line voltage looks sinusoidal because it is a
PWM waveform with 2N + 1 levels in maximum.
Let iPu and iNu be the positive and negative arm currents,
and let iSu be the supply current flowing into the center
terminal of the u-phase center-tapped inductor in Fig. 1.
Moreover, let iZu be the “circulating current” flowing through
the u-phase leg that was defined as [5]
iZu =1
2(iPu + iNu). (1)
idc
iPu
iNu
iZuiSu
iSv
iSw
vuvVdc
v1u
v(N
2+1)u
vC1u
vC(N
2+1)u
cell
cell
cell
cell
cell
cell
cell
cell
cell
C
C
LZ
Fig. 1. Circuit configuration of the DSCC converter consisting of N choppercells per leg.
The number of independent currents among iSu, iPu, and iNu
is not three but two because Kirchhoff’s current law comes
into existence at the center terminal in the u-phase center-
tapped inductor. This paper selects the circulating current iZu,
defined by (1), and the supply current iSu as two independent
currents, so that the positive and negative arm currents act as
dependent currents:
iPu = − iSu2
+ iZu (2)
iNu =iSu2
+ iZu. (3)
The first terms on the right-hand sides in (2) and (3) are
related to the supply current. They are out of phase by 180◦
each other. As a result, the magnetic fluxes produced by the
supply current cancel out each other inside the magnetic core
of the center-tapped inductor. Therefore, the inductor presents
no inductance to the supply current, whereas it renders the
inductance LZ to the circulating current. Note that by using
the circulating current in (1) for control makes it possible to
regulate and balance the mean dc voltage of each split and
floating capacitor.
B. Control for the DSCC Converter
The DSCC converter based on phase-shifted-carrier PWM
is characterized by hierarchical control consisting of the fol-
lowing three layers [10]:
• Overall capacitor-voltage control.
• Arm-balancing control.
• Individual balancing control.
The overall capacitor-voltage control in the top layer takes
the responsibility to regulate the mean voltage of all the
capacitors to its reference. Adjusting a small amount of active
power supplied from the ac mains makes it possible to regulate
it.
The arm-balancing control in the middle layer plays an
important role in balancing six mean voltages, each of which
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
3
is the mean voltage of N/2 capacitors per arm. The dc
component of the circulating current in each leg is adjusted
to exchange a small amount of active power among the three
legs, while the fundamental (50 Hz) ac component is used
for the adjustment of an active-power difference between the
positive and negative arms.
The individual balancing control residing in the bottom
layer takes charge of regulating each capacitor voltage to the
mean voltage of N/2 capacitors per arm. This straightforward
control adjusts the active power formed by the arm-side
voltage of each chopper cell and the arm current.
C. Instantaneous Power Flow to Each DC Capacitor
Assuming ideal conditions, the arm-side voltage reference
of each chopper cell is given as follows [5], [6]:
v∗ju = −2v∗uN
+Vdc
N(j = 1 to N/2), (4)
v∗ju =2v∗uN
+Vdc
N(j = N/2 + 1 to N), (5)
where v∗u is the u-phase ac-terminal-voltage reference, and
N is the number of chopper cells per leg. The actual arm-
side voltage consists of v∗ju and harmonic voltages caused
by PWM, v′ju. The instantaneous power flowing into the
capacitor, pju, is given by the product between the arm-side
voltage v∗ju + v′ju and the arm current iPu or iNu. Equations
(2)–(5) give pju as follows:
pju = (v∗ju + v′ju)iPu
=v∗uiSuN
+VdciZuN
− 2v∗uiZuN
− VdciSu2N
−v′juiSu
2+ v′juiZu (j = 1 to N/2), (6)
pju = (v∗ju + v′ju)iNu
=v∗uiSuN
+VdciZuN
+2v∗uiZuN
+VdciSu2N
+v′juiSu
2+ v′juiZu (j = N/2 + 1 to N). (7)
Although the first to fourth terms at the right-hand sides
on (6) and (7) are independent of the carrier frequency fC,
their harmonic frequencies depend on the supply frequency
fS. On the other hand, harmonic frequencies of the fifth and
sixth terms depend on those of v′ju. The dominant harmonic
frequencies of v′ju consist of integer multiples of the carrier
frequency and its sideband frequencies. The amplitude of
the ac components contained in each capacitor voltage are
inversely proportional to their harmonic frequencies. When the
carrier frequency is high enough, v′ju is negligible. However,
it should be taken into account when the carrier frequency is
in a range of 100 to 200 Hz while the supply frequency is
50 Hz.
III. ANALYSIS OF CAPACITOR VOLTAGE FLUCTUATION
A. Definition of a Switching Function
The following assumptions are made to achieve power-flow
analysis:
• Two IGBTs used in each chopper cell are ideal switches.
• The arm current consists of a dc component and a
fundamental-frequency (50 Hz) component. This means
that a second-order (100 Hz) component and switching
components caused by PWM are negligible.
• Both arm-balancing control and individual balancing con-
trol produce no effect on the modulated waveform for
each chopper cell, vmd in (9).
• The phase-shifted-carrier PWM assigns a triangular-
carrier waveform to a chopper cell, vtri, and another one
that is phase-shifted by 360◦/N to the next chopper cell.
Let a switching function be S in this section, where S = 0when vmd < vtri, and S = 1 when vmd > vtri. The state
of S = 0 means that the positive switch in the chopper cell
remains turned off whereas the negative one remains turned on.
As a result, the arm-side voltage is zero and no current flows
into the floating capacitor (iC = 0). The state of S = 1 means
that the positive switch in the chopper cell remains turned on
whereas the negative one remains turned off. As a result, the
arm-side voltage is equal to vC and the current flowing into
the capacitor is equal to the arm current (iC = iarm).
The states definition produces the following equation:
iC = Siarm. (8)
The switching function S can be expanded into
S = vmd +∞∑
n=1
An. (9)
The first term at the right-hand side on (9) represents the
modulated waveform. The second term is the component
caused by switching or PWM, which is referred to as the “arm-
side switching component” hereinafter. Let fS (= ωS/2π) be
the supply frequency, φv be an initial phase, and a (0 ≤ a ≤ 1)
be the modulation factor. As a result, the modulated waveform
vmd in (9) can be written as
vmd =1
2+
a
2sin(ωSt+ φv). (10)
Since An in (9) has a center frequency nfC that multiplies
the carrier frequency fC (= ωC/2π) by a positive integer n,
it is given by
An =2
nπsin (nπvmd) cos
(
n(ωCt+ θint))
, (11)
where θint is the initial phase of the carrier waveform. Let
Jy(x) be the y-order Bessel function of the first kind, m be
an integer, and θ′int be equal to θint + π/2. The use of Jy(x)allows expanding An into
An =2
nπ
∝∑
m=−∝
Jm
(nπa
2
)
sin2(π
2(n+m)
)
× sin(
(nωC +mωS)t+ nθ′int +mφv
)
. (12)
Equation (12) shows that the harmonic frequencies of the
arm-side switching components consist of a center frequency
nfC and its even sideband frequencies nfC ± mfS for odd
number of n; and odd sideband frequencies nfC±mfS without
a center frequency for even number of n.
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
4
B. Derivation of the Capacitor Voltage
From (2) and (3), the arm current iarm is given as the sum
of its dc circulating-current component IZ0 and its supply-
frequency sinusoidal component by
iarm = IZ0 + ISa sin(ωSt+ φi), (13)
where ISa and φi are the amplitude and phase of the sinusoidal
component, respectively. Note that the sinusoidal component
defined in (13) is equal to half of the supply current defined
in (2) and (3). Equations (8) and (9) yield the current flowing
into the capacitor as follows:
iC = vmdiarm +
∞∑
n=1
iCswn, (14)
where iCswn is the switching components of the capacitor
current, which is the product of the arm-side switching com-
ponents and the arm current (Aniarm). Equations (12) and (13)
give iCswn in (14) as follows:
iCswn =1
nπ
∝∑
m=−∝
Jm
(nπa
2
)
sin2(π
2(n+m)
)
[
2IZ0 sin(
(nωC +mωS)t+ nθ′int +mφv
)
+ ISa cos(
(
nωC + (m− 1)ωS
)
t+ nθ′int +mφv − φi
)
− ISa cos(
(
nωC + (m+ 1)ωS
)
t+ nθ′int +mφv + φi
)
]
.
(15)
Equations (13) and (14) give the capacitor voltage vC as
follows:
vC =1
C
∫
vmdiarmdt+1
C
∫ ∞∑
n=1
iCswndt+ VC
= −VC1 cos(ωSt+ φ′)− aISa8ωSC
sin(2ωSt+ φv + φi)
+
∞∑
n=1
vCswn + VC , (16)
where VC1 and φ′ are the amplitude and phase of the
fundamental frequency component in the capacitor voltage,
respectively, and given by (48) and (49) in the Appendix.
The terms related to cos(ωSt+φ′) and sin(2ωSt+φv+φi) in
(16) are the voltage components resulting from the modulated
waveform, which consist of the first-order and second-order
components. The last term VC is the dc component, and the
second last term is the switching components caused by PWM.
Therefore, vCswn is referred to as the “capacitor switching
component.” It appears from the active power formed by the
arm-side switching component corresponding to An in (9)
and the arm current. Equations (15) and (16) give vCswn as
follows:
vCswn =1
nπC
∝∑
m=−∝
Jm
(nπa
2
)
sin2(π
2(n+m)
)
[
− 2IZ0nωC +mωS
cos(
(nωC +mωS)t+ nθ′int +mφv
)
+ISa
nωC + (m− 1)ωSsin(
(
nωC + (m− 1)ωS
)
t+ nθ′int +mφv − φi
)
− ISanωC + (m+ 1)ωS
sin(
(
nωC + (m+ 1)ωS
)
t+ nθ′int +mφv + φi
)
]
. (17)
Equation (17) shows that the spectra in the vicinity of nfCget larger in amplitude than those of the others. Equation (17)
also gives the following findings related to vCswn.
• The capacitor switching component vCswn includes har-
monic components that consist of the center frequency
nfC and its sideband frequencies nfC±mfS and nfC±(m∓ 1)fS . These harmonic components may influence
the amplitude, phase, and frequency of the original ac
component. In the worst case, they may produce overvolt-
ages across each capacitor, and may bring “saturation”
or “overmodulation” to the control system of the DSCC
converter.
• When either nfC −mfS = 0 or nfC − (m ± 1)fS = 0comes into existence, a dc component is included in
vCswn. When the dc component is low enough, it can
be canceled out by the individual balancing control.
However, when it is higher, vC would continue diverging
gradually.
• As fC gets lower, vCswn becomes more problematic
because its amplitude is inversely proportional to fC.
C. Effect of vCswn on the DC Component of the Capacitor
Voltage
Equations (16) and (17) suggest that the effect of vCswn on
the dc component of the capacitor voltage can be evaluated
by the dc component contained in iCswn. When a solution of
nfC +m′fS = 0 exists under a negative integer of m, where
m′ = −m or −m∓1, iCswn includes a dc component. Let the
irreducible fraction of the carrier frequency fC with respect to
the supply frequency fS be f ′C/f
′S
1, and let a positive integer
be k. The following combination gives the above solution:
(n,m′) = (kf ′S, kf
′C). (18)
The dc component included in iCswn=kf ′
S, ICk can be calcu-
lated by substituting (18) into the term satisfying the equation
of nfC +m′fS = 0 in (15) as follows:
ICk = |ICk| sin(kf ′Sθ
′int + kf ′
Cφv + φk), (19)
1For example, when fC = 125 Hz and fS = 50 Hz, f ′
C/f ′
S = 5/2.
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
5
|∆VC |%max[%]
40
10
5
0fC[Hz]50 100 150 200 250 300 350 400 450
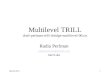
Fig. 2. Mathematical analysis of the normalized maximum dc voltagefluctuation |∆VC |%max against the carrier frequency fC.
TABLE IPARAMETERS USED IN ANALYSIS
Supply (line) frequency fS 50 Hz
Unit capacitance constant HC 40 ms
Per-unit ac-link inductance Lpuac 0.1 pu
DC voltage/supply voltage Vdc/VS 2
Active power/rated power p/P 1
Reactive power/rated power q/P 0
where |ICk| is the absolute maximum value of ICk, and
φk depends on kf ′S, kf ′
C, and φi. By combining the same
frequency component in (15) and defining a function F (x, y)as
F (x, y) =√
x2 + y2 − 2xy cos{2(φv − φi)}, (20)
equations (15), (19), and (20) give |ICk| as follows:
• When both kf ′S and kf ′
C are even or odd numbers,
|ICk| =∣
∣
∣
∣
∣
ISakf ′
SπF
(
Jkf ′
C−1
(
kf ′Sπa
2
)
, Jkf ′
C+1
(
kf ′Sπa
2
)
)∣
∣
∣
∣
∣
. (21)
• When either kf ′S or kf ′
C is an even or odd number, and the
other is an odd or even number, respectively,
|ICk| =∣
∣
∣
∣
2IZ0kf ′
SπJkf ′
C
(
kf ′Sπa
2
)∣
∣
∣
∣
. (22)
Equations (21) and (22) show that as the three positive integers
f ′S, f ′
C, and k get larger, |ICk| gets smaller.
The dc voltage fluctuation occurring across the capacitor
voltage vC is caused by a total of dc components contained
in iC . The total current components is given by
IC =
∞∑
k=1
ICk. (23)
Let the amount of dc voltage fluctuation over a line-cycle
period TS (= 1/fS) be ∆VC . It is given as follows:
∆VC =1
C
∫ t0+TS
t0
∞∑
k=1
ICkdt =
∞∑
k=1
ICk
CTS. (24)
Thus, ∆VC can be evaluated by ICk. Equation (19) suggests
that a sinusoidal change in ICk is accompanied by a linear
∆V %C
[%]
10
5
0
-5
-10
θint[◦]
−90 −180 −270 −360
Mathematical analysisNumerical evaluation
Fig. 3. Comparisons between mathematical analysis and numerical evaluation
in terms of ∆V %C
and θint at fC = 150 Hz.
change in the initial phase of the carrier waveform, θint.When phase-shifted PWM is applied, the initial phases of
all the carrier waveforms exist in a range from 0◦ to −360◦
uniformly. In other words, all the chopper cells have different
values in ICk and ∆VC . Therefore, this paper defines the
normalized maximum dc voltage fluctuation, |∆VC |%max, that
can be used to evaluate the maximum of ∆VC .
|∆VC |%max =
∞∑
k=1
|ICk|CVC
TS × 100[%], (25)
where |ICk| represents the maximum of ICk with respect to
θint, and VC represents the capacitor-voltage reference. Note
that |∆VC |%max is inversely proportional to the unit capacitance
constant of the capacitor, HC [33]. Moreover, it can be
determined uniquely from the two frequencies fS and fC,
the per-unit ac-link inductance Lpuac , the ratio of the dc-link
voltage with respect to the supply voltage, Vdc/VS, and the
ratios of instantaneous active and reactive power p and q with
respect to the rated power, p/P and q/P , respectively. (See
the Appendix.)
Fig. 2 shows analytical values of |∆VC |%max when the carrier
frequency fC lies in a range of 50 to 450 Hz. Table I
summarizes the parameters used for the analysis, along with
TS = 20 ms. The analytical values are calculated from (21),
(22), (25), and (43)–(47). Note that all the components in the
range of k ≤ 50 are considered where fC satisfies a relation
of f ′S ≤ 50.
When f ′S = 1 and fC = nfS with a positive integer n,
|∆VC |%max takes 11% at fC = 100 Hz, 7.2% at fC = 150 Hz,
and less than 1% at fC = 200 Hz where the supply frequency
fS is 50 Hz. Moreover, when f ′S = 2 and fC = nfS/2 with
an odd number of n, it takes 7.7% at fC = 75 Hz, and less
than 1% at fC = 125 Hz. This means that significant voltage
fluctuations occur at fC = 100 Hz and 150 Hz that are twice
and triple as high as the supply frequency fS.
Fig. 3 shows the comparison of mathematical analysis and
numerical evaluation in terms of the normalized dc volt-
age fluctuation ∆V %C over the carrier initial phase θint at
fC = 150 Hz. Note that these values are calculated with the
parameters summarized in Table I. The analytical values of
∆V %C take into account two components at k =1, and 2 in
(24), which are given from
∆V %C =
∆VC
VC× 100 ≈ IC1 + IC2
CVCTS × 100 [%], (26)
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
6
where TS = 20 ms. On the other hand, by means of using
a spreadsheet program, the numerical evaluation is made as
follows: The ideal simulation of phase-shifted-carrier PWM
generates a gate signal that is equivalent to a switching func-
tion. The product of the switching function and the arm current
yields the current flowing into the corresponding capacitor.
The dc voltage fluctuation can be calculated by integration of
the current with respect to time. It is clear from Fig. 3 that
both mathematical analysis and numerical evaluation agree
well with each other although the mathematical analysis is
completely different from the numerical evaluation. Fig. 3
indicates that the maximum difference in ∆V %C between the
lowest and highest values is 14% over a time interval of 20 ms
at fC = 150 Hz.
D. Effect of vCswn on the AC Component of the Capacitor
Voltage
A combination (n, m′′) of n with another integer of m,
where m′′ = 0, ±m, or ±m ∓ 1, allows expanding the ca-
pacitor switching component vCswn into individual harmonic
component that has a frequency of fCsw(n, m′′)
fCsw(n, m′′) = |nfC +m′′fS|. (27)
Their amplitudes VCsw(n, m′′) are given by
• When both n and |m′′| are even or odd numbers.
VCsw(n, m′′) =
∣
∣
∣
∣
∣
ISan|nωC +m′′ωS|πC
× F(
J|m′′|−1
(nπa
2
)
, J|m′′|+1
(nπa
2
))
∣
∣
∣
∣
∣
. (28)
• When either n or |m′′| is an even or odd number, and the
other is an odd or even number, respectively.
VCsw(n, m′′) =
∣
∣
∣
∣
2IZ0n|nωC +m′′ωS|πC
J|m′′|
(nπa
2
)
∣
∣
∣
∣
. (29)
From (27)–(29), VCsw(n, m′′) is inversely proportional to
fCsw(n, m′′), and decreases as n and |m′′| increase. When
fCsw(n, m′′) = 0, the capacitor voltage can be given as a linear
function. This justifies an assumption of VCsw(n, m′′) = 0.
Equation (16) suggests that the “ac” component contained in
vC generally consists of the first-order (supply-frequency) and
second-order components, as well as the capacitor switching
components. This paper evaluates the ac component as an
arithmetic sum of the amplitudes of all the frequency com-
ponents, VCmax. Equations (16) and (17) give it as follows:
VCmax = VC1+2 +
∞∑
n=1
∞∑
m=−∞
VCsw(n, m′′), (30)
where VC1+2 represents the sum of the amplitudes of the first-
order and second-order components. The normalized value of
the maximum total amplitude V %Cmax in zero-to-peak can be
defined as
V %Cmax =
VCmax
VC× 100 [%]. (31)
V %Cmax
[%]
180
100
80
60
40
20
0fC[Hz]50 100 150 200 250 300 350 400 450
Fig. 4. Mathematical analysis of the maximum amplitude of the ac voltagepresent in vC against the carrier frequency fC .
Like |∆VC |%max in the previous subsection, V %Cmax is inversely
proportional to the unit capacitance constant HC , and can be
determined uniquely from fS, fC, Zpuac , Vdc/VS, p/P , and
q/P .
Fig. 4 shows analytical values of V %Cmax in a range of
fC from 50 to 450 Hz. They are calculated from (28)–(31)
and (43)–(47) with the parameters summarized in Table I,
considering capacitor switching components in a range of
|m| ≤ 4 at n = 1 and |m| ≤ 6 at n = 2. The values of V %Cmax
are almost constant in a range of fC from 400 to 450 Hz in
Fig. 4. This means that the value at fC = 450 Hz corresponds
mostly to VC1+2 because the first term at the right-hand side
on (30) is independent of fC. The remainder of each value in
the range of 50 to 400 Hz would be the capacitor switching
component that decreases as ωC (= 2πfC) in (28) and (29)
increases. On the other hand, when f ′S = 1 and fC = nfS with
a positive integer n, V %Cmax has peak values in the vicinity of
fC = 50, 100, 150 Hz at fS = 50 Hz. Moreover, when f ′S = 2
and fC = nfS/2 with an odd number n, it has a peak value in
the vicinity of 75 Hz at fS = 50 Hz. The reason is that one
of the main frequency components of vCsw(n, m′′) appears in
the vicinity of 0 Hz.
The aim of the individual balancing control is to regulate the
mean dc capacitor voltage. Since the ac component included
in vC acts as a disturbance that may interfere with the current
control system, it should be eliminated by a digital low-pass
filter such as a moving-average filter. Equation (16) indicates
that the ac component includes the first-order frequency (fS),
the second-order frequency (2fS), and capacitor switching fre-
quencies. If all the frequencies are given by integer multiples
of the lowest frequency fL, it is possible to set the moving
window time of a moving-average filter to 1/fL. This makes
it possible to eliminate all the frequency components from the
capacitor voltage. As fL gets higher, the moving window time
gets shorter, thus making the delay time caused by the moving
average filter shorter. It is clear from Fig. 4 that the switching
components are negligible for fC > 200 Hz. As a result, the
ac component consists only the first-order and second-order
frequency components. This leads to a relation of fL = fS, so
that the moving window time can be set to 1/fL = 1/fS.
On the other hand, for fC < 200 Hz, not only the first-
order and second-order frequency components but also the
capacitor switching components should be eliminated by the
moving average filter. The harmonic frequency fCsw(n, m′′)
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
7
TABLE IICOMPARISONS AMONG SEVEN CARRIER-FREQUENCY CANDIDATES IN A RANGE OF 100 TO 450 HZ
Carrier frequency [Hz] 110 120 125 130 150 175 200
f ′
C/f′
S 11/5 12/5 5/2 13/5 3/1 7/2 4/1
Moving window time [ms] 100 100 40 100 20 40 20
Stable or unstable stable stable stable stable unstable stable unstable*
Reference [16] [16] [16] [16] [16]
* The authors of [16] concluded that the MMC is unstable at the carrier frequency of 200 Hz, whereasthis paper verifies that the DSCC converter is actually stable at this carrier frequency, as shown in Fig. 12.
in (27) takes zero and nfS/f′S with a positive integer n.
This is because the combination of the initial phase of the
modulated waveform with that of the carrier frequency is
periodic with a frequency of fS/f′S. Note that a relation of
fC/fS = f ′C/f
′S indicates that the triangular-carrier waveform
with a period of TC = 1/fC is repeated f ′C times in the
time interval given by multiplying the supply-frequency period
TS = 1/fS by f ′S. This means the existence of a relation of
fL = fS/f′S. Hence, setting a moving window time of the
moving-average filter to 1/fL = f ′S/fS enables eliminating all
the ac components including the first-order and second-order
frequency components. Thus, setting f ′S to be lower makes the
delay time caused by the moving average filter shorter.
IV. OPTIMAL CARRIER FREQUENCIES OBTAINED FROM
THE ANALYSIS
Table II summarizes the comparisons in irreducible fre-
quency fraction f ′C/f
′S, moving window time, and system
stability among seven carrier-frequency candidates in a range
of 100 to 200 Hz, where the supply frequency fS is 50 Hz.
A moving average filter is mandatory for the individual
balancing control in order to extract the dc component from
each capacitor voltage. The moving window time depends on
the ratio of the carrier frequency with respect to the supply
frequency, and dominates dynamic performance of the DSCC
converter.
Figs. 2 and 4, along with Table II, lead to the following
considerations on the seven carrier-frequency candidates:
• Fig. 2 indicates that two carrier frequencies of 100 Hz and
150 Hz should be removed from the optimal candidates
because they cause a dc current to flow into, or out of,
each capacitor, thus resulting in unstable operation. In
other words, both frequencies make f ′S equal to unity in
a range of 2 ≤ fC/fS ≤ 3.
• Fig. 4 suggests that carrier frequencies in the vicinity of
100 Hz and those in the vicinity of 150 Hz should be
removed from the optimal candidates because they bring
large ac voltages to vC .
• Table II concludes that three carrier frequencies of 110,
120, and 130 Hz may be good optimal candidates [16].
However, a moving window time of 100 ms is required
for the moving average filter in order to eliminate ac
components from each capacitor voltage. This may bring
poor dynamic performance to the DSCC converter. On the
other hand, the operation at fC = 125 and 175 Hz have
better dynamic performance than those at fC = 110, 120,
and 130 Hz, since the moving window time is as short as
40 ms at two carrier frequencies of 125 Hz and 175 Hz.
AC Grid AC Grid
DC Grid DC Grid
DC
AC
AC
DC
AC
DC
DC
AC
(a)
(b)
Fig. 5. Basic configurations. (a) A back-to-back (BTB) system between twoac grids. (b) A front-to-front (FTF) system between two dc grids.
• The carrier frequency of 200 Hz can be considered
as a singular frequency. Because the operation at
fC = 200 Hz, where the carrier frequency is an integer
multiple of the supply frequency, causes a dc current to
flow in each capacitor, it is concluded that this carrier
frequency should be avoided based on the theory and
simulation presented in [16]. However, it is clear from
Fig. 2 that the dc current at 200 Hz is much smaller in
amplitude than those at 100 Hz and 150 Hz. Hence, the
individual balancing control forming a voltage feedback
loop can cancel out such a small dc current, thus making
the DSCC converter stable. This interesting finding will
be confirmed both by experiment and computer simula-
tion in the following section.
The above considerations result in the following conclusion:
An optimal carrier frequency is 125 Hz (a frequency ratio of
5/2) in a range of 100 to 200 Hz when priority is given to
a switching-power-loss reduction as well as to good dynamic
performance, where the supply frequency is 50 Hz. Another
is 200 Hz (a frequency ratio of 4/1) when more emphasis is
put on better dynamic performance.
V. DSCC-BASED FTF SYSTEM
A. BTB and FTF Systems
Fig. 5(a) shows a back-to-back (BTB) system that is one of
typical applications of DSCC converters to grid connections.
The BTB system can be used as an interface between two
ac grids. It can act practically as a frequency changer, an
asynchronous power-flow controller, or a bidirectional ac-
to-dc or dc-to-ac power converter in a long-distance high-
voltage dc current (HVDC) system. Fig. 5(b) shows a front-to-
front (FTF) system that is characterized by the combination
of two bidirectional power converters with a single ac-link
transformer, as opposed to the BTB system. Modern DSCC
converters as well as conventional two-level or three-level
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
8
TABLE IIIMASTER AND SLAVE CONTROL MODES
Role Control Function Frequency
DSCC-A Slave Closed-loop Current source Uncontrollable
DSCC-B Master Open-loop Voltage source Controllable
voltage-source converters are applicable to the FTF system. A
dc-link capacitor is indispensable to the conventional voltage-
source converters. However, it can be eliminated from both
BTB and FTF systems when a pair of DSCC converters are
used, thus resulting in reducing the size and weight, and in
improving system reliability.
Power converters used for grid connections usually share
their respective ac or dc terminals with other converters to
create a common ac or dc link. When an FTF system is
applied to two dc grids, the coupling of one dc grid with the
other is done through an intermediary ac-link transformer for
galvanic isolation and voltage matching. This configuration
can be expanded to use multiple converters connected to
the same ac link, creating the so-called “multiterminal dc-
grid interconnection.” Since the dc voltages are not directly
coupled, a dc fault on one feeder does not propagate directly
to the others. Fast switching operation of the converters used
in the FTF system can isolate the faulty feeder from the rest
of the system.
B. Control Strategy
The FTF system is separated into a master converter and a
slave converter. To work properly, the slave converter (DSCC-
A) should control the power flow while the master converter
(DSCC-B) should maintain the voltage and frequency on the ac
link. In this regard, the slave converter can be seen as a current
source whereas the master converter can be seen as a voltage
source. Table III summarizes the differences in control mode
between DSCC-A and DSCC-B. This strategy makes it easy
to expand the FTF system to a multiterminal interconnection,
where several slave converters are connected to a single master
converter.
Assuming DSCC-B as a master converter, the three-phase
line-to-neutral voltage commands in the master converter can
be written as
v∗uB =
√
2
3Vac sinωt, (32)
v∗vB =
√
2
3Vac sin(ωt−
2π
3), (33)
v∗wB =
√
2
3Vac sin(ωt+
2π
3), (34)
where Vac is the line-to-line rms voltage at the ac side of
the master converter, and ω is the desired frequency of the ac
link, and it can be selected freely, depending on a compromise
between the system size and the switching loss. For medium-
/high-voltage high-power converters, the switching frequency
of the system should be set as low as possible to reduce
the switching loss. On the other hand, using a low switching
frequency may make the response time of the controller slow.
The derived optimal carrier frequency can be regarded as
TABLE IVCIRCUIT PARAMETERS FOR EXPERIMENT
Rated power P 10 kW
Nominal dc voltage E 400 V
AC-link line-to-line voltage Vac 200 V
AC-link frequency fac 180/112.5/50 Hz
Transformer voltage ratio 1 : 1
Chopper-cell number per leg N 16
Capacitor C 6.6 mF
Capacitor mean voltage VC 50 V
Unit capacitance constant HC [33] 40 ms
AC-link inductor Lac 0.4 mH (11.3%*)
Center-tapped inductor LZ 3 mH (84.8%*)
PWM carrier frequency fC 450 Hz
Equivalent switching frequency NfC 7.2 kHz
Dead time 8 µs
Values in ( ) are on a three-phase, 200-V, 10-kW, 180-Hz base.
a compromise between the switching loss and the response
time of the controller. This paper discusses the power flow
control of the FTF system using the derived optimal frequency
ratios, where the carrier frequency is 450 Hz, and the ac-link
frequencies are 180 Hz and 112.5 Hz. However, the analyses
for losses and efficiency of the FTF system are not discussed
and beyond the scope of this paper.
While the master converter has the function of controlling
the ac-link voltage and frequency, the slave converter plays
an important role in adjusting power flow at the voltage
and frequency. The power flow can be adjusted indirectly
by controlling two independent currents on the rotating dqreference frames; the d-axis current for active power and the
q-axis current for reactive power, respectively. Since ac voltage
commands at the master converter are used as a feedforward
input for the decoupled current control, only the three-phase
ac-link currents of the slave converter should be detected to
form a current feedback loop. Hence, neither phase-locked
loop (PLL) circuit nor ac voltage sensor is required for the
control system.
VI. EXPERIMENTAL SETUP
Fig. 6 illustrates the circuit configuration of the DSCC-based
FTF system used in the following experiments. It uses an
adjustable dc power supply for both dc sides, and the ac-link
sides are set at 200 V. Table IV summarizes the parameters
used in the circuit. Each converter circuit consists of 16
chopper cells per leg. A phase-shifted pulsewidth modulation
(PWM) technique is applied to 16 triangular-carrier signals
at a constant frequency of fC = 450 Hz, which are phase-
shifted each other by 22.5◦. Note that the equivalent switching
frequency for each leg is 7.2 kHz. The ac-link frequency facis selected as 180 Hz with fC/fac = 5/2, and 112.5 Hz with
fC/fac = 4/1 from the analysis derived in Section IV.
The overall control system consists of the Texas Instruments
TMS320C6713 digital signal processor (DSP), two Altera
Cyclone II field-programmable gate array (FPGA) units, and
some interface circuits for signal filtering units and multiplexer
(MUX) units. Each FPGA unit detects the 48-to-6 multi-
plexed dc-capacitor voltages, and the positive and negative
arm currents. Note that no ac-link voltage is detected, so
that only 14 analog signals are sent to each FPGA unit.
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
9
Fig. 1
DSCC-A
(Slave)
Fig. 1
DSCC-B
(Master)
iAvdcA
iBvdcB
idcA idcB
200 V/200 V
180/112.5/50 Hz
MUX: Multiplexer
E400 V
iPAiNA
iPB
iNB
vCA vCB
p∗ q∗
Lac Lac
FPGA-A (Altera Cyclone II) FPGA-B (Altera Cyclone II)DSP
TMS320C6713
gate
signals
96 6 6
gate
signals
9666
48 48
MUX MUX
LPF LPFLPF LPF
Fig. 6. Experimental circuit configuration for the 400-Vdc, 10-kW DSCC-based FTF system with a constant carrier frequency of 450 Hz.
DSCC-ADSCC-B
DAQ-A
DAQ-B
DSP and FPGAs
Fig. 7. Photo of the 400-Vdc, 10-kW DSCC-based FTF system, the digitalcontroller, and data acquisition systems used for experiments.
Each FPGA unit produces 96 (=2×48) gate signals in total
to drive all the chopper cells, each of which consists of four
parallel RENESAS RJK1529 MOSFETs per chopper arm.
Two PC-based data acquisition (DAQ) systems (Yokogawa
WE7000) are simultaneously used for capturing experimental
waveforms. The sampling frequency of the DAQ system was
set to 100 kHz for all operations.
Fig. 7 provides an overview of the DSCC-based FTF system
used for this experiment excluding the transformer. Note that
the transformer and dc capacitors used in this experiment are
optimized for 50-Hz operation. Further reductions in size and
weight should be made, according to the ac-link frequencies
used in the system. An optimum ac-link frequency can be
decided by a good compromise among transformer size and
weight, switching losses, and ac-link harmonic contents.
VII. EXPERIMENTAL AND SIMULATED WAVEFORMS
A. Steady-State Performance With fC/fac = 5/2
Fig. 8 shows the experimental and simulated waveforms
in a steady-state condition for DSCC-A when it is sending
a power of 10 kW to DSCC-B. Fig. 9 shows the respective
experimental and simulated waveforms for DSCC-B. This
experiment was done by setting DSCC-B in master mode and
DSCC-A in slave mode. This means that DSCC-B should act
as a voltage source, while DSCC-A acts as a current source.
It can be seen that the ac link has three-phase multilevel
voltages and sinusoidal currents. Note that neither arm currents
nor capacitor voltages in the v-phase and w-phase legs is
shown in Figs. 8 and 9, because the waveforms differ only
in phase from those in the u-phase leg. The reference voltages
used for generating the ac-link voltages in DSCC-B are used
as feedforward voltages in the decoupled current control for
DSCC-A. Since DSCC-A produced no reactive power, DSCC-
B ran at unity-power-factor operation.
B. Transient Operation With fC/fac = 5/2
Fig. 10 shows the experimental and simulated waveforms
for DSCC-A with slave mode when the power reference is
changed from 10 kW to 8 kW, and then back to 10 kW
for 20 ms with step changes. This section presents only the
waveforms obtained from DSCC-A because the waveforms
from DSCC-B operating as the master converter are similar
to those from DSCC-A. The waveforms show that the system
remains stable although the power reference p∗ was changed
instantaneously. Fig. 11 shows the experimental and simulated
waveforms for the rated-power reversal in DSCC-A. This
experiment can easily be done in the FTF system by generating
the appropriate power reference without altering the polarity
or amplitude of dc-link voltages. The power reference was
changed linearly from 10 kW to −10 kW during an interval
of 20 ms. These results conclude that the power reversal can
be achieved without any problem on the capacitor-voltage
balancing.
C. Experimental Waveforms With fC/fac = 4/1
Fig. 12 shows the experimental waveforms in DSCC-A
for power-reversal operation at another ac-link frequency of
112.5 Hz. Similar results are also obtained for DSCC-B. The
power reference is adjusted with a ramp change of 10 kW to
−10 kW during 20 ms. From this result, it can be concluded
that although the carrier frequency fC is an integer multiple
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
10
5 ms
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[kW]pdcA
15
0
-15
[A]iPuA
iNuA
50
0
-50
❄
iPuA
(a)
5 ms
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[kW]pdcA
15
0
-15
[A]iPuA
iNuA
50
0
-50
❄
iPuA
(b)
Fig. 8. Experimental and simulated waveforms of DSCC-A with fC/fac = 5/2, operating in the slave mode under the rated inversion. (p∗ = 10 kW,q∗ = 0). (a) Experimental waveforms. (b) Simulated waveforms.
5 ms
[V]vuvBvvwB
vwuB
400
0
-400
❄
vuvB
[A]iuBivBiwB
50
0
-50
❄
iuB
[V]vC1uB
vC9uB
75
50
25
0
❄
vC1uB
[kW]pdcB
15
0
-15
[A]iPuB
iNuB
50
0
-50
❄
iPuB
(a)
5 ms
[V]vuvBvvwB
vwuB
400
0
-400
❄
vuvB
[A]iuBivBiwB
50
0
-50
❄
iuB
[V]vC1uB
vC9uB
75
50
25
0
❄
vC1uB
[kW]pdcB
15
0
-15
[A]iPuB
iNuB
50
0
-50
❄
iPuB
(b)
Fig. 9. Experimental and simulated waveforms of DSCC-B with fC/fac = 5/2, operating in the master mode under the rated rectification. (p∗ = 10 kW,q∗ = 0). (a) Experimental waveforms. (b) Simulated waveforms.
of the ac-link frequency fac with a ratio of four, the FTF
system can run in stable operation under both steady-state and
transient conditions. The simulated results have very similar
waveforms but are not shown due to page limitation reason.
D. Comparison in Capacitor Voltage Fluctuation
Fig. 13 shows the experimental waveforms of the capacitor
voltage fluctuation under the following three ac-link frequen-
cies: fac = 50, 112.5, and 180 Hz, where the carrier frequency
fC was kept constant at 450 Hz. The ac-link inductor Lac for
the 50-Hz case is 2 mH instead of 0.4 mH. The peak-to-peak
ripple voltage ∆vCju for all the cases are 8.6 V, 3.8 V, and
3.5 V at 50 Hz, 112.5 Hz, and 180 Hz, respectively. For the
180-Hz ac-link frequency case, the peak-to-peak ripple voltage
∆vCju corresponds to 7% of the rated dc capacitor voltage. It
is obvious that the peak-to-peak ripple voltage of the capacitors
gets higher as the ac-link frequency gets lower, as long as the
same capacitance value is used.
E. Harmonic Frequency Spectra of Capacitor Voltage
Figs. 14 and 15 show the normalized values of analytical,
experimental, numerical, and simulated harmonic frequency
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
11
20 ms[kW]p∗
15
0
-15
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[A]iPuA
iNuA
50
0
-50
❄
iPuA
[kW]pdcA
15
0
-15
(a)
20 ms[kW]p∗
15
0
-15
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[kW]pdcA
15
0
-15
[A]iPuA
iNuA
50
0
-50
❄
iPuA
(b)
Fig. 10. Experimental and simulated waveforms of DSCC-A with fC/fac = 5/2, operating in the slave mode under a step change of power reference p∗.(a) Experimental waveforms. (b) Simulated waveforms.
20 ms[kW]p∗
15
0
-15
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[A]iPuA
iNuA
50
0
-50
❄
iPuA
[kW]pdcA
15
0
-15
(a)
20 ms[kW]p∗
15
0
-15
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[kW]pdcA
15
0
-15
[A]iPuA
iNuA
50
0
-50
❄
iPuA
(b)
Fig. 11. Experimental and simulated waveforms of DSCC-A with fC/fac = 5/2, operating in the slave mode under the rated-power reversal from inversionto rectification during an interval of 20 ms. (a) Experimental waveforms. (b) Simulated waveforms.
spectra of vC1u on the slave converter at fac = 180 Hz
and 112.5 Hz, respectively, under the rated power inversion.
The figures show that all harmonic spectra agree well with
each other. Note that the harmonic components caused by
switching action influence the capacitor voltage fluctuation
when the ratio of the carrier frequency with respect to the ac-
link frequency gets lower. The harmonic components caused
by switching action include not only the second-order and
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
12
20 ms[kW]p∗
15
0
-15
[V]vuvAvvwA
vwuA
400
0
-400
❄
vuvA
[A]iuAivAiwA
50
0
-50
❄
iuA
[V]vC1uA
vC9uA
75
50
25
0
❄
vC1uA
[A]iPuA
iNuA
50
0
-50
❄
iPuA
[kW]pdcA
15
0
-15
Fig. 12. Experimental waveforms for DSCC-A with fC/fac = 4/1 underthe rated-power reversal operation.
20 ms[V]vC1uB
vC9uB
60
50
40
❄
vC1uB
[V]vC1uB
vC9uB
60
50
40
❄
vC1uB
[V]vC1uB
vC9uB
60
50
40
❄
vC1uB
fac = 50 Hz
fac = 112.5 Hz
fac = 180 Hz
Fig. 13. Experimental comparison in capacitor voltage fluctuation amongthree ac-link frequencies, fac = 50, 112.5, and 180 Hz at the same carrierfrequency as fC = 450 Hz.
carrier-frequency components but also the sideband frequen-
cies around the integer multiples of the carrier frequency.
When fac = 180 Hz and fC = 450 Hz, the lowest harmonic
frequency fL is 90 Hz (= fC− 2fac) on the capacitor voltage
fluctuation. Correspondingly, the moving window time of the
moving-average filter, which is used for the voltage-balancing
control of all the dc capacitors, is set on the basis of the lowest
harmonic frequency, i.e., 1/fL. On the other hand, for the ac-
link frequency of 112.5 Hz, the lowest harmonic frequency fLis the same as 112.5 Hz, so that the moving window time can
be set as 1/fac. Although the capacitor voltages are fluctuating
at 112.5 Hz and its integer multiples, the average capacitor
voltages can be kept at 50 V by using an appropriate moving-
average filter incorporated in the voltage-balancing control.
��������
����������������������
����
����������
���
� ����
� �� ��
�� � �� � � ����������������
����������
��������
�����
����
��
��
�� � ����
� �� � �� �� ��������
��������������������
���
��������
���
�� ��
� �� ��
�� � �� � �� ��
���
���
���
V %C1uA[%]
4
3
2
1
0
Analytical
Experimental
Numerical
Simulated
180 360 540 720 900 1080 1260 f [Hz]
Fig. 14. Frequency spectra of the ac components contained in vC1u of DSCC-A at fac = 180 Hz and fC = 450 Hz.
����������������
����������������
����
��������
���
��
����
���
������
��
����
��
����
���
��
����
��������������������������
�������
����������
���
�� ��
��
������
��
����
��
����
��
����
����
��
����������������
��������������
����
������
��
�� � ��
�� � �� � ����
� �� ��
���
���
���
V %C1uA[%]
4
3
2
1
0
Analytical
Experimental
Numerical
Simulated
225 450 675 900 1125 1350 1575 f [Hz]
Fig. 15. Frequency spectra of the ac components contained in vC1u of DSCC-A at fac = 112.5 Hz and fC = 450 Hz.
VIII. CONCLUSION
This paper has provided theoretical and experimental dis-
cussions on optimal carrier frequencies and their effect on
voltage-balancing performance of each floating capacitor in a
three-phase DSCC converter with phase-shifted-carrier PWM.
This paper has concluded that an optimal frequency ratio of
the carrier frequency with respect to the supply (ac) frequency
is 5/2 when priority is given to a switching-power-loss re-
duction. This paper has also presented a front-to-front (FTF)
system consisting of a pair of modular multilevel cascade con-
verters based on double-star chopper cells (MMCCs-DSCC)
and a three-phase medium-frequency transformer for voltage
matching and galvanic isolation. The system configuration is
applicable to a high-voltage high-power bidirectional isolated
dc-to-dc converter. The voltage and frequency of the ac link
can be controlled directly by the master converter. As a
result, neither phase-locked loop (PLL) circuit nor ac voltage
sensor is required. The viability and validity of the system
have been verified by experimental and simulated results.
The FTF system based on phase-shifted PWM with optimal
carrier frequency ratios of fC/fac = 5/2 and 4/1 yields
stable operation and provides good dynamic performance. The
experimental and simulated results agree well with those from
the numerical and mathematical analyses developed in this
paper.
APPENDIX
From circuit symmetry in Fig. 1, the u-phase variables are
considered. Let the supply line-to-neutral voltage be vSu and
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
13
the supply current be iSu as
vSu =
√
2
3VS sinωSt, (35)
iSu =√2IS sin (ωSt+ φ′
i), (36)
where IS and φ′i are given by
IS =
√
p2 + q2√3VS
, (37)
φ′i = − tan−1 q
p. (38)
Equations (35)–(38) and Kirchhoff’s voltage law give the u-
phase ac terminal voltage of the DSCC converter vu as follows:
vu = vSu − LacdiSudt
=
√
2
3V sin (ωSt+ φ′
v), (39)
where a relation of Zpuac = ωSLacP/V
2S allows representing
V and φ′v in (39) as follows:
V = VS
√
(
1− q
PZpuac
)2
+( p
PZpuac
)2
, (40)
φ′v = − tan−1 pZpu
ac /P
1− qZpuac /P
. (41)
The following relation exists between the dc-link voltage of
the DSCC converter, Vdc and the dc voltage of each chopper
cell, VC [10].
Vdc =NVC
2. (42)
Equations (4), (5), (10), and (39)–(42) give the modulation
factor a and phase φv as follows:
a = 2
√
2
3
VS
Vdc
√
(
1− q
PZpuac
)2
+( p
PZpuac
)2
, (43)
φv =
{
− tan−1 pZpuac /P
1−qZpuac /P
+ π for the positive arm
− tan−1 pZpuac /P
1−qZpuac /P
for the negative arm.
(44)
The dc component of the arm current, IZ0 is given by
IZ0 = − p
3Vdc. (45)
Equations (2), (3), (13), (37), and (38) give the amplitude and
phase of the 50-Hz component of the arm current as
ISa =
√2
2IS =
√
p2 + q2√6VS
, (46)
φi =
{
− tan−1 q/p+ π for the positive arm
− tan−1 q/p for the negative arm.(47)
Equations (10), (13), and (16) give the amplitude and phase
of the fundamental frequency component of the capacitor
voltage as follows:
VC1 =1
2ωSC
√
a2I2Z0 + I2Sa + 2aIZ0ISa cos(φv − φi), (48)
φ′ = tan−1 aIZ0 sinφv + ISa sinφi
aIZ0 cosφv + ISa cosφi
. (49)
Equation (25) suggests the following relation of
|∆VC |%max ∝∑∞
k=1 |ICk|/CVC . It is clear from (20),
(21) and (22) that |ICk|/CVC has a function of f ′S, f ′
C,
a, φv − φi, ISa/CVC , and IZ0/CVC . Once fS and fC are
determined, f ′S and f ′
C are determined uniquely. Equations
(43), (44), and (47) indicate that a and φv − φi depend only
on Zpuac , Vdc/VS and p/P , q/P . Equations (42), (45), and
(46) give ISa/CVC and IZ0/CVC as follows:
ISaCVC
=1
HC
√
3
2
Vdc
VS
√
( p
P
)2
+( q
P
)2
, (50)
IZ0CVC
= − 1
HC
p
P, (51)
where HC in the above two equations is the unit capacitance
constant of the DSCC converter, and is defined as [33]
HC = 3NCV 2C/2P. (52)
REFERENCES
[1] H. Akagi, “Classification, terminology, and application of the modularmultilevel cascade converter (MMCC),” IEEE Trans. Power Electron.,vol. 26, no. 11, pp. 3119–3130, Nov. 2011.
[2] R. Marquardt and A. Lesnicar, “A new modular voltage source invertertopology,” in Proc. EPE 2003, pp. 2–4.
[3] M. Glinka, “Prototype of multiphase modular-multilevel-converter with2 MW power rating and 17-level-output-voltage,” in Proc. IEEE PESC
2004, pp. 2572–2576.
[4] M. Glinka and R. Marquardt, “A new ac/ac multilevel converter family,”IEEE Trans. Ind. Electron., vol. 52, no. 3, pp. 662–669, Jun. 2005.
[5] M. Hagiwara and H. Akagi, “PWM control and experiment of modularmultilevel converters,” in Proc. IEEE PESC 2008, pp. 154–161.
[6] M. Hagiwara and H. Akagi, “Control and experiment of pulsewidth-modulated modular multilevel converters,” IEEE Trans. Power Electron.,vol. 24, no. 7, pp. 1737–1746, Jul. 2009.
[7] M. Hagiwara, K. Nishimura, and H. Akagi, “A medium-voltage motordrive with a modular multilevel PWM inverter,” IEEE Trans. Power
Electron., vol. 25, no. 7, pp. 1786–1799, Jul. 2010.
[8] H. Peng, M. Hagiwara, and H. Akagi, “Modeling and analysis ofswitching-ripple voltage on the dc link between a diode rectifier anda modular multilevel cascade inverter (MMCI),” IEEE Trans. Power
Electron., vol. 28, no. 1, pp. 75–84, Jan. 2013.
[9] M. Hagiwara, I. Hasegawa, and H. Akagi, “Start-up and low-speedoperation of an adjustable-speed motor driven by a modular multilevelcascade inverter (MMCI),” IEEE Trans. Ind. Appl., vol. 49, no. 4,pp. 1556–1565, Jul./Aug. 2013.
[10] K. Sekiguchi, P. Khamphakdi, M. Hagiwara, and H. Akagi, “A grid-level high-power BTB (Back-To-Back) system using modular multilevelcascade converters without common dc-link capacitor,” IEEE Trans. Ind.
Appl., vol. 50, no. 4, pp. 2648–2659, Jul./Aug. 2014.
[11] Y. Okazaki, M. Hagiwara, and H. Akagi, “A speed-sensorless start-up method of an induction motor driven by a modular multilevelcascade inverter (MMCI-DSCC),” IEEE Trans. Ind. Appl., vol. 50, no. 4,pp. 2671–2680, Jul./Aug. 2014.
[12] P. Khamphakdi, K. Sekiguchi, M. Hagiwara, and H. Akagi, “A trans-fomerless back-to-back (BTB) system using modular multilevel cascadeconverters for power distribution systems,” IEEE Trans. Power Electron.,vol. 30, no. 4, pp. 1866–1875, Apr. 2015.
[13] S. Kouro, M. Malinowski, K. Gopakumar, J. Pou, L. G. Franquelo,B. Wu, J. Rodriguez, M. A. Perez, and J. I. Leon, “Recent advancesand industrial applications of multilevel converters,” IEEE Trans. Power
Electron. vol. 57, no. 8, pp. 2553–2580, Aug. 2010.
[14] M. A. Perez, S. Bernet, J. Rodriguez, S. Kouro, and R. Lizana, “Circuittopologies, modeling, control schemes, and applications of modularmultilevel converters,” IEEE Trans. Power Electron. vol. 30, no. 1, pp. 4–17, Jan. 2015.
[15] S. Debnath, J. Qin, B. Bahrani, M. Saeedifard, and P. Barbosa, “Oper-ation, control, and applications of the modular multilevel converter: areview,” IEEE Trans. Power Electron. vol. 30, no. 1, pp. 37–53, Jan.2015.
www.IranSwitching.ir

0885-8993 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. Seehttp://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI10.1109/TPEL.2015.2464694, IEEE Transactions on Power Electronics
14
[16] K. Ilves, L. Harnefors, S. Norrga, and H.-P. Nee, “Analysis and operationof modular multilevel converters with phase-shifted carrier PWM,” IEEETrans. Power Electron. vol. 30, no. 1, pp. 268–283, Jan. 2015.
[17] B. Li, R. Yang, D. Xu, G. Wang, W. Wang, and D. Xu, “Analysis ofthe phase-shifted carrier modulation for modular multilevel converters,”IEEE Trans. Power Electron. vol. 30, no. 1, pp. 297–310, Jan. 2015.
[18] Q. Tu, Z. Xu, and L. Xu, “Reduced switching-frequency modulationand circulating current suppression for modular multilevel converters,”IEEE Trans. Power Del. vol. 26, no. 3, pp. 2009–2017, Jul. 2011.
[19] M. Saeedifard and R. Iravani, “Dynamic performance of a modularmultilevel back-to-back HVDC system,” IEEE Trans. Power Del. vol. 25,no. 4, pp. 2903–2912, Oct. 2010.
[20] J. Mei, B. Xiao, K. Shen, L. M. Tolbert, and J. Y. Zhen, “Modularmultilevel inverter with new modulation method and its application tophotovoltaic grid-connected generator,” IEEE Trans. Power Electron.
vol. 28, no. 11, pp. 5063–5073, Nov. 2013.[21] S. Fan, K. Zhang, J. Xiong, and Y. Xue, “An improved control system for
modular multilevel converters with new modulation strategy and voltagebalancing control,” IEEE Trans. Power Electron. vol. 30, no. 1, pp. 358–371, Jan. 2015.
[22] R. Darus, J. Pou, G. Konstantinou, S. Ceballos, R. Picas, and V. G.Agelidis, “A modified voltage balancing algorithm for the modular mul-tilevel converter: evaluation for staircase and phase-disposition PWM,”IEEE Trans. Power Electron. vol. 30, no. 8, pp. 4119–4127, Aug. 2015.
[23] A. Hassanpoor, S. Norrga, H.-P. Nee, and L. Angquist, “Evaluation ofdifferent carrier-based PWM methods for modular multilevel convertersfor HVDC application,” in Proc. IEEE IECON 2012, pp. 388–393.
[24] X. Shi, Z. Wang, L. M. Tolbert, and F. Wang, “A comparison ofphase disposition and phase shift PWM strategies for modular multilevelconverters,” in Proc. IEEE ECCE 2013, pp. 4089–4096.
[25] S. Rohner, S. Bernet, M. Hiller, and R. Sommer, “Modulation, losses,and semiconductor requirements of modular multilevel converters,”IEEE Trans. Ind. Electron. vol. 57, no. 8, pp. 2633–2642, Aug. 2010.
[26] A. Hassanpoor, L. Angquist, S. Norrga, K. Ilves, and H-. P. Nee,“Tolerance band modulation methods for modular multilevel converters,”IEEE Trans. Power Electron. vol. 30, no. 1, pp. 311–326, Jan. 2015.
[27] M. S. A. Dahidah, G. Konstantinou, and V. G. Agelidis, “A review ofmultilevel selective harmonic elimination PWM: formulations, solvingalgorithms, implementation and applications,” IEEE Trans. Power Elec-
tron. vol. 30, no. 8, pp. 4091–4106, Aug. 2015.[28] Q. Tu and Z. Xu, “Impact of sampling frequency on harmonic distortion
for modular multilevel converter,” IEEE Trans. Power Del. vol. 26, no. 1,pp. 298–306, Jan. 2011.
[29] S. Du, J. Liu, and T. Liu, “Modulation and closed-loop-based dc capac-itor voltage control for MMC with fundamental switching frequency,”IEEE Trans. Power Electron. vol. 30, no. 1, pp. 327–338, Jan. 2015.
[30] K. Ilves, L. Harnerfors, S. Norrga, and H-. P. Nee, “Predictive sortingalgorithm for modular multilevel converters minimizing the spread inthe submodule capacitor voltages,” IEEE Trans. Power Electron. vol. 30,no. 1, pp. 440–449, Jan. 2015.
[31] P. M. Meshram and V. B. Bhorgate, “A simplified nearest level con-trol (NLC) voltage balancing method for modular multilevel converter(MMC),” IEEE Trans. Power Electron. vol. 30, no. 1, pp. 450–462, Jan.2015.
[32] D. Siemaszko, “Fast sorting method of balancing capacitor voltages inmodular multilevel converters,” IEEE Trans. Power Electron., vol. 30,no. 1, pp. 463–470, Jan. 2015.
[33] H. Fujita, S. Tominaga, and H. Akagi: “Analysis and design of a dcvoltage-controlled static var compensator using quad-series voltage-source inverters,” IEEE Trans. Ind. Appl., vol. 32, no. 4, pp. 970–978,Jul./Aug. 1996.
www.IranSwitching.ir