Embed Size (px)
Citation preview

Elastic, thermal expansion, plastic and rheological processes –
theory and experiment
Csaba Asszonyi1, Attila Csatar1,2, Tamas Fulop1,3
1Montavid Thermodynamic Research GroupH-1112 Budapest, Igmandi u. 26, Hungary (e-mail: [email protected])
2Hungarian Institute of Agricultural EngineeringH-2100 Godollo, Tessedik S. u. 4, Hungary (e-mail: [email protected])
3Department of Energy EngineeringBudapest University of Technology and Economics
H-1111 Budapest, Bertalan L. u. 4-6, Hungary (e-mail: [email protected])
Abstract
Rocks are important examples for solid materi-als where, in various engineering situations, elas-tic, thermal expansion, rheological/viscoelastic andplastic phenomena each may play a remarkablerole. Nonequilibrium continuum thermodynamicsprovides a consistent way to describe all these as-pects in a unified framework. This we present herein a formulation where the kinematic quantities al-low arbitrary nonzero initial (e.g., in situ) stressesand such initial configurations which – as a con-sequence of thermal or remanent stresses – do notsatisfy the kinematic compatibility condition. Thevarious characteristic effects accounted by the ob-tained theory are illustrated via experimental resultswhere loaded solid samples undergo elastic, ther-mal expansion and plastic deformation and exhibitrheological behaviour. From the experimental data,the rheological coefficients are determined, and themeasured temperature changes are also explained bythe theory.
Dedicated to the memory of Zoltan Szarka (1927–2015).
Keywords
solids, elasticity, rheology, thermal expansion, plas-ticity, thermodynamics
1 Introduction
Motivated by problems in rock mechanics and sim-ilar challenges in the continuum theory of solids, inthe last few years, our research object has beento achieve an amalgamation of a new approach[1, 2, 3, 4] to the problem of objectivity and of mate-rial frame indifference – based on Matolcsi’s frame-work [5, 6, 7, 8] – with a recent activity in nonequi-librium thermodynamics [9, 10, 11, 12] that focuseson the role of thermodynamical stability and on aconstructive quantitative exploitation of the con-tent of the second law of thermodynamics. Here,we present how this program has accomplished atheoretical framework for the continuum thermo-elasto-visco-plasto-mechanics of solids.
Accordingly, the aspects covered currently are:• elasticity, an immediate response to mechani-
cal loading, and during which mechanical en-ergy is conserved;
• rheology, which, in contrast, is a delayed re-sponse, with mechanical energy partially dissi-pated, and which may be attributed to viscousdamping, for instance;
• plasticity, which is permanent shape changecaused by mechanical loading: a change of theunloaded shape;
• thermal expansion, and the thermal stress gen-erated by it;
• and heat conduction.
1
arX
iv:1
512.
0586
3v1
[co
nd-m
at.s
oft]
18
Dec
201
5

In parallel to the general level – large deformationtheory, general constitutive equations –, we con-sider it inevitable to exhibit (and countercheck!)the applicability of the formulation to practical con-crete examples. To this end, we have performed ex-periments on which the theory can be applied andtested. The experimental results presented here il-lustrate the various predictions of the theory bothqualitatively and quantitatively. Via this simpleyet widely informative and insightful experimentalexample – mechanical and thermal monitoring ofuniaxial stretching of polyamide-6 plastic samples–, the various thermomechanical effects in solidsare well demonstrated and the correspondence tothe theoretical expectations are satisfactorily estab-lished.
Therefore, though the theoretical framework de-scribed here is capable to describe completely gen-eral situations, here our aim is to focus on theconnection between theory and experiment so, ateach component of our theoretical formulation, wetake the simplest applicable concrete choice: smalldeformations, Hooke elasticity with constant elas-tic coefficients, constant specific heat, thermal ex-pansion and heat conduction coefficients, and con-stant plastic change rate coefficient and yield stress.These assumptions satisfactorily suit the obtainedexperimental data.
We start the discussion with the kinematic quan-tities according to the mentioned recent objectiveapproach. Then we build elasticity, thermal ex-pansion and plasticity around these quantities, viacontinuum thermodynamics. We show how the pre-dicted behaviours can be observed experimentally.Next, we incorporate rheology into the theory, andpoint out how the example measurement results in-dicate the presence of rheology both on the me-chanical and the thermal side. We determine therheological coefficients from the experimental data,and discuss the related arising numerical challengesand the used solutions that enabled us to obtainthese coefficients reliably. In the Discussion sec-tion, we summarize the most important outcomesand lessons, and outline the future perspectives andaims. Technical details concerning the measure-ment can be found in the Appendix.
2 The kinematic ingredients
We start with a succint account of the objectiv-ity respecting definition of the involved kinematicquantities, presented in detail in [1, 2, 3, 4]. Forcontinua – solids, liquids and gases each – the mo-tion determines the instantaneous distance of anytwo material points. This defines an instantaneousmetric h on the material manifold. Hereafter, over-tilde indicates tensors on the material manifold, op-erating on the material tangent vectors. For solids,the novel and important notion is the relaxed orself-metric g, which describes the distances of ma-terial points when the solid is in an unstressed, re-laxed state. In such a state, h = g. The relaxedmetric characterizes the relaxed shape of a solidbody.
For the purposes of the elastic state variable, theappropriate kinematic quantity can be defined from
A = g−1h, (1)
the elastic shape symmetric tensor – the (objectivegeneralization of the) right Cauchy–Green tensor –,as
D =1
2ln A. (2)
This elastic deformedness tensor D is on whichelastic stress, σ, is considered to depend on, lin-early (Hooke’s law) or nonlinearly (e.g., a neo-Hooke model). This logarithmic type – objectivelygeneralized Hencky strain – definition (2) is dis-tinguished both geometrically (the spherical/tracepart of describes the volumetric change and the de-viatoric part corresponds to the constant-volumechanges, even for large deformations [1, 13, 14]) andexperimentally (for example, large-deformationstress in materials like hard rubber is most linear inthis logarithmic tensor [15, 16], the five-parameterMurnaghan model of nonlinear elasticity also per-forms the best in this logarithmic variable [17], andsee also [18].
Via the (objective generalization of the) defor-mation gradient, the material tangent vectors canbe mapped to the spatial vectors. Our materialtensors (h, A etc.) are correspondingly mapped totheir spatial counterpart (h, A etc.). The change
of h in time, and thus the time derivative of A, can
2

be calculated with the aid of the velocity gradient
L = v ⊗←
∇ (3)
(and its transpose Ltransp =→
∇⊗ v), and one finds
A = LA + ALtransp (4)
for the comoving time derivative A, as long as onlyelasticity is involved (g = const.).
Thermal expansion is the phenomenon that theunstressed and relaxed size, hence, the relaxed met-ric, of solid bodies depends on temperature: g =g(T )(T denoting absolute temperature throughoutthis paper). If the material is isotropic, which weassume in what follows, then this temperature de-pendence is a simple scalar rescaling:
g(T2) = Λ(T1, T2)2g(T1), (5)
α(T ) = lim∆T→0
Λ (T, T + ∆T )− 1
∆T, (6)
the latter formula defining the linear thermal ex-pansion coefficient α. It follows that, when tem-perature changes in time at a material point, wehave
g =
(d
dTg
)T = 2α(T )T g (7)
for the comoving time derivative of the relaxed met-ric, and (4) is generalized to
A = LA + ALtransp − 2αTA. (8)
Plasticity (see, e.g., the recent monography [19])is, in our language, another phenomenon involvingthe change of g: strong enough mechanical stresscauses the relaxed shape – and metric – of a solidto change permanently. This change can be char-acterized by the plastic change rate tensor
Z =1
2g−1gplastic, (9)
with which the total kinematic time evolution equa-tion is
A = LA + ALtransp − 2αTA− 2ZA. (10)
In the subsequent sections, we restrict ourselvesto the small-deformation regime, ‖D‖ 1, A =e2D ≈ 1 + 2D, where (10) leads, in the leading
order of D, to 2D = L + Ltransp − 2αT1 − 2Z,rearrangable as
Lsym = D + αT1 + Z (11)
(sym standing for symmetric part). Further, for ourpurposes below, the thermal expansion coefficientcan be taken as constant.
3 Comparison with the usualapproach to kinematicquantities
Conventionally, a reference frame and an initialtime t0 is chosen, and displacements are consideredin the space of this reference frame and are mea-sured related to positions at t0. From the displace-ments, the deformation gradient is defined, and thevarious strain measures are constructed from thedeformation gradient. One consequence of this ap-proach is that initial strains are necessarily zero,and the corresponding elastic stress is also zero.Initial strains also necessarily satisfy the compati-bility condition.
Furthermore, when thermal expansion is alsoconsidered then a homogeneous initial temperaturedistribution is assumed as well.
One of our aims with the alternative kine-matic formulation expounded in the preceding sec-tion was to generalize this approach to situationswhere initial (e.g., in situ) stresses are unavoidablynonzero, the initial temperature distribution is farfrom homogeneous, or where in situ or remanentstresses indicate that the compatibility conditionis violated already initially. Namely, as we haveshown [1, 2, 3, 4], while the instantaneous metric his a flat Riemann metric by definition, the relaxedRiemann metric g is not necessarily flat (so thecompatibility condition – see its finite deformationversion lengthy formula in [1, 2] – is violated), forexample as a consequence of some plastic precedinghistory or an inhomogeneous temperature distribu-tion. Then these two metrics necessarily differ atsome parts of the material, causing there nonzeroelastic deformedness, and thus leading to nonzeroelastic stress (remanent, ”frozen” stress).
In our generalized formulation, strains – whichare nevertheless important notions for experimentalpurposes – can be given as time integrals of the
3

various terms of (11) from reference time to currenttime: total strain ε is the time integral of the lhsterm, elastic strain εel is that of the first term onthe rhs, thermal expansion strain εth is that of thesecond one, and plastic strain εpl is the integralof the third term. In the small deformation regimeinvolved in the experiments below, these definitionssuffice and no finite deformation complication needsto be addressed.
4 Mechanics and thermody-namics
Our chosen elastic constitutive equation is Hooke’slaw:
σ = EdevDdev + EsphDsph (12)
with the spherical and deviatoric components andelastic coefficients
Dsph = 13 (trD)1, Ddev = D−Dsph, (13)
Esph = 3K, Edev = 2G. (14)
For us here, it suffices to consider Edev and Esph asconstant. From (12), it is easy to show [2] that theclassic Duhamel–Neumann formula for thermoelas-ticity [20] is recovered as a special case, via trans-forming from the elastic deformedness variable tothe total strain and imposing that, at the initialreference time,• elastic deformedness is zero,• the temperature distribution is homogeneous,• and plastic change does not occur.The first law of continuum thermodynamics, i.e.,
the balance of internal energy, reads
%e = −je ·←
∇+ tr (σLsym) (15)
for the specific internal energy e(D, T ) and its cur-rent je, both to be specified constitutively (and themass density % being constant in the small defor-mation regime). Similarly, the balance for specificentropy s(D, T ) is
%s = −js ·←
∇+ πs, (16)
where we take the simplest and standard choicejs = je/T for the the entropy current js, s must
be thermodynamically consistent with e (i.e., theGibbs relation must hold between them), and en-tropy production must be positive definite, πs ≥ 0.Specifically, we take
je = λ→
∇ 1
T, (17)
that is, standard Fourier heat conduction, with pos-itive coefficient λ, and
e = cT +
Edev
2%tr[(Ddev
)2]+Esph
2%tr[(Dsph
)2]+Esph
%TαtrDsph, (18)
for specific internal energy, in which the first termprovides the constant specific heat c, the middleterm describes elastic energy, and the last one is re-sponsible for thermal expansion. The correspond-ing specific entropy is determined up to an additiveconstant, as
s = c lnT
T∗+Esph
%αtrDsph (19)
with an arbitrarily auxiliary constant T∗. In theresulting entropy production,
πs =→
∇ 1
T· je +
1
Ttr(σZ) (20)
=→
∇ 1
T· je +
Edev
Ttr(DdevZ) +
Esph
Ttr(DsphZ).
the first term of the rhs is non-negative due to (17),and we ensure the two further terms to be positivedefinite by choosing the plastic constitutive equa-tion as
Z = ΓDdev (21)
with
Γ = γH
(tr[(Ddev
)2]− 2
3D2
crit
)×H
(tr[(
DdevDdev)])
, (22)
where γ and Dcrit are positive constants, and H isthe Heaviside function.
Equation (21) describes a natural plasticity the-ory:• the plastic change rate is proportional to the
deviatoric elastic change rate,
4

• the yield criterion is the von Mises one (notethat, now, stress is in a Hookean relationshipwith elastic deformedness so D can be replacedby σ, and Dcrit is equivalent to a σcrit, the vonMises yield stress),• and plastic change is switched off during un-
loading, as a consequence of the second Heav-iside factor that ensures the thermodynamicalrequirement πs ≥ 0.
For temperature dependent coefficients Esph,Edev, α, c, for more general internal energy, forlarge deformations, and for anisotropic materials,one can derive similar though somewhat more com-plicated formulae.
The change of temperature is determined by therate equation derivable from (18) with (15), (12)and (11) substituted:
%cT = −je ·←
∇− EsphαT trDsph + Edev tr(DdevZ).(23)
The first term here gives account of the effect ofheat. The second term is the source of the Joule–Thomson effect for solids: cooling during stretch-ing and warming during compression. This is a re-versible type change, a less obvious but inevitablemanifestation of thermal expansion. The thirdterm, on the contrary, describes an irreversible ef-fect, being non-negative – as a result of the non-negativity of entropy production – and thus alwayscausing warming whenever plastic change takesplace.
Adding the mechanical equation of motion,
%v = σ ·←
∇, (24)
or its force-equilibrial approximation (applied inwhat follows)
σ ·←
∇ = 0, (25)
to the balance and constitutive equations above, wearrive at a closed set of dynamical equations: (3),(11)–(12), (17), (21)–(23) and (24) [or (25)]. (Volu-metric forces can, naturally, be added if necessary.)Therefore, we can calculate any concrete process,provided the required amount of initial and bound-ary conditions are at hand.
5 Uniaxial processes – formu-lae and experimental illus-tration
We demonstrate the application of the obtainedtheoretical framework on uniaxial processes. Suchsituations are seminal because of two reasons: theyare simple to calculate, and are capable to describemany experimental tests. For bodies with such spe-cial geometry, and assuming adiabaticity as wellas symmetry respecting space independent bound-ary conditions, all quantities have a homogeneousdistribution. In other words, quantities are timedependent but space independent. In appropriatecoordinate system, tensors have at most only lon-gitudinal (||) and transversal (⊥) components:
σ =
(σ
0
0
), D =
(D
D⊥
D⊥
),
ε =
(ε
ε⊥
ε⊥
)etc. (26)
The deviatoric and spherical parts read, conse-quently - shown on the example of D:
Ddev =1
3
2(D −D⊥)−(D −D⊥)
−(D −D⊥)
,Dsph =
1
3
(D +2D⊥
D +2D⊥
D +2D⊥
). (27)
Let us consider a mechanical equilibrial initialcondition: D(t0) = 0 at an initial time t0 – when,naturally, no plastic change takes place: Z(t0) = 0,and the purely elastic stress is zero –, and let T0
denote the initial temperature. The total strain ε– measured in experiments directly –, is, as men-tioned earlier, the time integral of Lsym countedfrom t0 so it also starts from zero at initial time.From a finite difference numerical perspective, thesolution can be determined as follows. For def-initeness, let us consider the case of force-drivenprocess, where σ (t) is prescribed (taking into con-sideration that, in the small-deformation regime,the change of cross-section can be neglected). Forstrain-driven processes, a similar but somewhatmore refined scheme is needed. Notably, the fi-nite difference scheme outlined here is, despite its
5

simplicity, suitable to demonstrate that the solu-tion of the problem is well-defined. In addition, formany solid mechanical applications, its precisenessand performance may suffice with moderately smalltime steps.
So, assuming that all quantities are known upto time t, from the prescribed σ (t + ∆t), whichactually means the knowledge of σ(t+ ∆t), we de-termine D(t + ∆t) via (12). Next, using [D(t +∆t)−D(t)]/∆t as an approximation for D duringthe interval [t, t+ ∆t], we can apply (21) to calcu-late Z for this interval. Subsequently, (23) leads toa prediction of T , which then offers T (t+∆t). Also,it enables to determine Lsym = ε from (11) so, atlast, we obtain ε(t + ∆t) (which data is useful forcomparison with experimentally measured values).
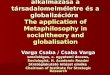
Figure 1: Characteristic time dependence of strainsand temperature during uniaxial stretching by in-creasing force, according to the theory (arbitraryunits, semi-quantitative plot: The thermal expan-sion coefficient is set unrealistically high to make itscontribution visible). Temperature (dash-dottedline) first decreases – like for an adiabatically ex-panding gas – and then increases – due to plasticdissipation –, elastic strain (dotted line) increasesas it follows the increased stress, and plastic strain(dashed line) appears only above the critical stress,causing that the total strain (solid line) starts toincrease faster.
If a sample starts from the considered initial con-ditions, i.e., a relaxed and equilibrial state, andundergoes stretching with increasing force, the ob-tained theory predicts the following qualitative be-haviour (see Fig. 1). Below the yield threshold,the Joule–Thomson effect is observable, and de-
creasing temperature results in some thermal con-traction, which acts against the increase of elasticdeformedness (but the latter dominates). Whenplastic change enters, it adds to the total strain in-crease, and the corresponding dissipation is a tem-perature increasing effect.
These phases can nicely be demonstrated exper-imentally when one monitors the temperature as-pect during the stretching process. Here, we showfive snapshots taken by a thermal camera duringan example experiment performed on a polyamide-6 plastic sample (see Fig. 2), which depict the im-portant stages (see Fig. 3). The last stage, fail-ure, is not modelled here theoretically but is aphenomenon also expected to be possible to incor-porate in a thermodynamical formulation [9, 10].Namely, failure is likely to be a loss of thermody-namical stability of the continuum.
Figure 2: The outline of the experiment. The mid-dle part of the sample was thinner, and was moni-tored by a thermal camera. Temperature values atthe two displayed spots were numerically displayed(see Fig. 3), together with the maximal tempera-ture in the rectangle area.
The same features can be observed in Fig. 4a,which presents the time series of loading force andtemperature of a similar experiment performed onthe same type of sample. Two loading–unloadingcycles have been carried out, the second with largermaximal stress than the first, but both surely re-
6

Figure 3: Snapshots taken by the thermal camera.The first one shows the initial state, then the quasi-adiabatic cooling is observable, then heat dissipa-tion appears due to plastic change, then the plasticchange reaches the whole thinner part of the sam-ple, and finally failure occurs.
mained below the yield threshold. The third load-ing was not terminated, in order to enter the regimeof plastic change and also to cause failure. Cor-respondingly, during the first two cycles, temper-ature first drops a bit and then it returns. Thethird loading also starts with cooling, until the plas-tic yield threshold is reached (see the small tran-sient in the stress curve), and subsequently plasticdissipation starts to take the leading role, result-ing in considerably raising temperature. Accord-ing to (23) with (21) [and (28) below], the coolingpart is linear in loading and the warming part isquadratic/parabolic.
In Fig. 4b, the first loading–unloading cycle isenlarged, and the measured temperature is showntogether with the prediction of the theory, calcu-lated via
%cT = −αT σ , (28)
which follows from (23) with the absence of plas-tic change and heat. Here, the literature con-stants % = 1150 kg/m3, c = 1700 J/(kgK) andα = 0.8 · 10−6 1/K have been used. The goodagreement with measurement indicates that thetheory works well and the applied approximations
(a) (b)
Figure 4: (a) Measured temperature (grey line)and force (black line) as a function of time, duringtwo complete loading–unloading uniaxial (strain-driven) stretching cycles followed by a loading untilplastic yield and failure. (b) Measured (grey line)and predicted (black line) temperature as a func-tion of time, during the first loading cycle. (Forcein units of 200 N, temperature in C, time in s.)
are valid.
One can observe that, after a loading-unloadingcycle, temperature does not exactly return to theinitial value but gets slightly raised. The effect islarger for the second, larger loading cycle. Plastic-ity is ruled out to be the cause of this dissipation.However, in fact there is another aspect, rheology,also in action, inside such materials. In the follow-ing section we show how rheology is required to beincorporated in view of the experimental mechani-cal data, how nonequilibrium thermodynamics pro-vides us the required framework, how the data canbe fitted to determine the rheological coefficients,and that the presence of rheology provides a correc-tion not only for the mechanical side but also con-tributes to the thermal changes as another sourceof dissipation.
6 The thermodynamicalframework for introduc-ing rheology
Adding rheology to the theory is possible with theaid of internal variables (dynamical degrees of free-dom [21]). For the simpler case of no thermal ex-pansion and no plasticity considered, the method-
7

ology has been given in [12]. Here, we extend thetreatment for thermal expansion and plasticity in-cluded. Details identical to the case of [12] are onlysummarized here, and here we focus on the differ-ences.
According to the methodology, we assume theexistence of a further quantity, which is expectedto be a symmetric tensor, corresponding to thatrheology manifests itself mainly in the mechani-cal behaviour, as an additional source of stress –such as an internal damping force. In addition tothe generalization of stress, we assume that spe-cific entropy, expressed as a function of D and e,now also depends on the new variable ξ, via anadditive quadratic term that ensures that, in ther-mal equilibrium, entropy still gets maximal (obey-ing the second law of thermodynamics). Namely,we have
s (D, e, ξ) = sprevious (D, e)− 1
2tr(ξ2). (29)
Taking its comoving time derivative, one can de-rive that entropy production obtains, in additionto (20), two extra terms,
πs =→
∇ 1
T· je +
1
Ttr(σZ)
+1
Ttr(σLsym)− %tr
(ξ2), (30)
where σ denotes the rheology-originated additionin stress, added to the previous, elastic, stress. TheOnsagerian way to ensure the non-negativeness ofthis surplus entropy production is to consider linearequations
σdev = ldev11 (Lsym)
dev+ ldev
12
(−%Tξdev
), (31)
ξdev = ldev21 (Lsym)
dev+ ldev
22
(−%Tξdev
), (32)
σsph = lsph11 (Lsym)
sph+ lsph
12
(−%Tξsph
), (33)
ξsph = lsph21 (Lsym)
sph+ lsph
22
(−%Tξsph
), (34)
with positive definite matrices of coefficients(ldev11 ldev
12
ldev21 ldev
22
),
(lsph11 lsph
12
lsph21 lsph
22
). (35)
Note that one could introduce Onsagerian couplingto the plasticity related term of (30), too. Never-theless, for our current needs, the present level ofgenerality suffices. Namely, it successfully explains
all aspects of the experimental data that we con-sider here. On the other side, without shifting theentropy – and thus without the last term of (30) –its term 1
T tr(σLsym) can be made positive definite
via standard viscosity, σdev being proportional to(Lsym)
dev, and σsph to (Lsym)
sph.
Hereafter, we discuss processes below the plasticyield threshold. In addition, we neglect the tinythermal expansion part in (11) corresponding tothe small temperature changes visible during load-ing cycles like in Fig. 4. Then we are in the approx-imation
Lsym = D = ε. (36)
In parallel, with absolute temperature nearly con-stant, the coefficients l can safely be consideredconstant, and we can eliminate ξ from the set ofequations (31)–(34). The elimination yields
σdev + τdevσdev (37)
= Edev0 Ddev + Edev
1 Ddev + Edev2 Ddev,
σsph + τ sphσsph (38)
= Esph0 Dsph + Esph
1 Dsph + Esph2 Dsph
for the total stress, where the new coefficients arestraightforward combinations of the former coeffi-cients l. These are two separate linear rheologicalmodels with σ, σ, D, D, D terms. Therefore, theclassic Kelvin–Voigt, Maxwell and Jeffrey rheolog-ical models are covered as special cases of theseKluitenberg–Verhas models (as named in [12], seethe explanation and further analysis there). An im-portant benefit of the thermodynamical derivationof these rheological models is that, from the sec-ond law of thermodynamics, conditions follow forthe coefficients in (37)–(38) (which are the positivedefiniteness criteria of the matrices (35) translatedto these coefficients, the simple derivation can befound in [12]), some of which are nontrivial andremarkable:
τdev ≥ 0, Edev0 ≡ Edev ≥ 0, (39)
Edev1 ≥ τdevEdev
0 , Edev2 ≥ 0, (40)
τ sph ≥ 0, Esph0 ≡ Esph ≥ 0, (41)
Esph1 ≥ τ sphEsph
0 , Esph2 ≥ 0. (42)
8

7 Determining rheologicalconstants from experimen-tal data
From experimental stress and strain values, one candetermine the τ , Ei constants. The first step to-wards this is to address the difference between Dand ε. Since D may not start from zero at the ini-tial time of an experiment – some pre-stressing isusually needed to ensure the proper initial state ofthe sample – and as strain gauges (or other strainmeasuring devices) may have some initial offset atinitial time, one needs to assume a difference be-tween initial D and ε, which leads to an offset δ:
σdev + τdevσdev (43)
= δdev + Edev0 εdev + Edev
1 εdev + Edev2 εdev,
σsph + τ sphσsph (44)
= δsph + Esph0 εsph + Esph
1 εsph + Esph2 εsph.
The particular δ values carry, therefore, no princi-pal information, as they are not material constantsbut just characterize the experimental setup andcircumstances.
The next is to realize the importance of havingmeasurement data for ε⊥ in uniaxial experiments.Namely, for uniaxial processes, it is possible [12]to derive from (43)–(44) a relationship between σand ε . That equation, however, contains deriva-tives up to the third derivative of σ and fourth ofε , and includes all the eight τ , Ei constants. Boththe high number of constants and the extractionof such high derivatives from discretely measureddata – that is burdened by error – are considerablepractical difficulties. Moreover, even with preciselydetermined coefficients in the relationship betweenσ and ε , inverting these back to the τ , Ei con-stants is problematic because of the nonlinear for-mulae [12] connecting the two sets of coefficients.It is therefore crucial to have reliable measurementof ε⊥, too, with which one can calculate the devi-atoric and spherical parts, and can then solve twoseparate fitting problems for 4–4 coefficients only.
The equations (43) and (44) are linear in the un-known parameters so a least-squares fitting seemsfeasible, with the data values measured at the dis-cretely many instants and the derivative values alsobeing derived from them. The third difficulty to
face at is that even the first and second derivativesare nontrivial to attribute to a data series even ifit has acceptably small errors: the errors get seri-ously amplified in neighbouring differences and thefitted parameters are unacceptably unreliable. Theapproach we have worked out for treating data likein Fig. 4a is as follows.
We intend to perform some smoothing so, insteadof treating an equation like (43) or (44) directly, letus consider a time integral of it. More precisely, wemultiply the equation by a window function cen-tered around a time t, and integrate the product.The novelty in doing this is that we choose such awindow function w(t) that is nonzero only in an in-terval [t1, t2] and it becomes zero at the two intervalendpoints such smoothly that even its first and sec-ond derivatives tend to zero there. The advantageof this is that, on the terms containing derivative,we can perform partial integration with the benefitthat the surface terms are zero, e.g.,∫ t2
t1
σ (t)w(t)dt =[σ (t)w(t)
]t2t1−∫ t2
t1
σ (t)w(t)dt
= −∫ t2
t1
σ (t)w(t)dt. (45)
This way, we can bring back all integrals of deriva-tives to integrals of functions themselves (multi-plied by the differentiated window function thatstill behaves nicely). This approach is similar tothe idea of the so-called test functions in distribu-tion theory. To ensure very fast calculations, wehave chosen w to be a polynomial, and after someexperimenting, we have found the polynomial
p(u) = (u+ 1)3(u− 1)3(u2 + 1), (46)
which apparently vanishes fast enough at the twoendpoints of the interval [−1, 1] (see Fig. 5), to per-form very well. Then, for general intervals [t1, t2],we have rescaled its variable to obtain w(t). Onechooses at least five different intervals and performsa least-squares fitting on the integrated values.
The integral of any data series was calculated nu-merically, but here we also wanted to improve theperformance. The reason for this is that, in manycases in practice, one has only a few dozens of datapoints at hand. We need to consider at least fivedifferent intervals for determining the five unknownconstants, or, if we also want some error bars for
9

Figure 5: The window function (46) (black line)and its first (dashed line) and second (dotted line)derivatives. Each of these three functions samplethe interval [−1, 1] visibly uniformly enough (notparticularly favouring some parts of the intervalover other parts).
the determined constants then at least seven inter-vals are preferable. Then the numerical integralsneed to be fairly reliable since their values will notdiffer too much, with the danger of numerical un-reliability.
To this end, we have modified the classic trape-zoidal rule for numerical integration. Namely, thetrapezoidal rule approximates the integrand by alinear function (piecewise). However, in our case, aproduct is to be integrated, and the second deriva-tive of our window function changes unavoidablyrapidly. This itself invalidates the (piecewise) lin-ear approximation considerably. The idea then isto approximate only the data itself by linear pieces,and to treat the window function (or its appropri-ate derivative) in an exact manner. For example,∫ tb
ta
σ (t)w(t)dt (47)
≈∫ tb
ta1
[σ (ta) +
σ (tb)− σ (ta)
tb − ta(t− ta)
]w(t)dt,
the calculation of which going back to the integralof w(t) and of tw(t), which both we can determineexactly.
After these preparations, data behaving likethose in Fig. 4a proved to be treatable. For rhe-ological constants, such parts of a time series areinformative where the data changes well enough so
that its second derivative also changes well enough.For demonstration, we show here the fitting for justa small part of the first loading-unloading cycle onFig. 4a: the ending part of the loading and the be-ginning part of the unloading. The abrupt changefrom loading to unloading may seem dangerous touse but is actually most informative for rheologi-cal parameters, which manifest themselves the bestduring heavy changes.
The least-squares fitting provides us error barsand an R2 value can also be calculated to quantifythe goodness of the fit, still, the best is when onecan also visualize the quality of the fit. To this end,solving the simple numerical scheme
σsphn + τ sphσ
sphn − σsph
n−1
∆t
= δsph + Esph0 εsph
n + Esph1
εsphn − εsph
n−1
∆t
+ Esph2
εsphn+1 − 2εsph
n + εsphn−1
∆t2(48)
for σsphn , we predicted σsph values from experimen-
tal εsph values and an initial σsph value (and treatedthe deviatoric counterpart analogously). An advan-tage of this scheme is that it is reliably applicableeven if some of the fitted coefficients are small, orare known to be zero a priori.
As mentioned, we present here the result for justa small part of the process, in order to exhibitthe quality of the established numerical approach.Thirty data points are used, and integration is doneon seven intervals. This way, each interval consistsof only six points. (Neighbouring intervals havean overlap of two points.) Apparently, six pointsmeans a rude discretization for an integral on aninterval so such a situation is a good test of thenumerical method. The obtained fitted coefficientsand the predictions based on them can be seen inTable 1 and Fig. 6.
Various further checks can be made for the deter-mined rheological coefficients. First, it is reassur-ing to find that the thermodynamical constraints(39)–(42) are fulfilled. Second, the elastic con-
stants Edev0 , Esph
0 enable to calculate Poisson’s ra-tio and Young’s modulus (see Appendix A of [12]).The resulting former value (0.37) coincides nicelywith the literature data (0.38). Young’s modulus(1.2 GPa) comes out somewhat below the typi-cal literature range (1.9 GPa ∼ 3.3 GPa) which,
10

material fitted standardparameter value error
τdev[s] 0.3600 ±0.0659
Edev0 [GPa] 0.8612 ±0.0556
Edev1 [GPa · s] 0.4724 ±0.0686
Edev2 [GPa · s2] 0.0029 ±0.0010
τ sph[s] 0.2329 ±0.0904
Esph0 [GPa] 4.5708 ±1.0392
Esph1 [GPa · s] 1.8566 ±0.4401
Esph2 [GPa · s2] 0.0013 ±0.0220
Table 1: Table of fitted rheological coefficients forthe deviatoric and spherical parts
however, depends heavily on humidity (that’s whythe literature range is so wide). In parallel, onemust bear in mind that customary measurementsof Young’s modulus are performed at finite load-ing speeds where the steepness of the longitudinalstress–strain curve is seriously influenced by rheol-ogy. For example, even for the simplest rheologi-cal situation, a Kelvin–Voigt model in the devia-toric part and a Hooke model in the spherical part,the uniaxial equation contains not only σ and εbut also their first time derivative, too ([12], Ap-pendix A). The ratio of these derivatives, σ /ε ,dominates the slope of the longitudinal stress–strain curve at the beginning of the loading and, fornot too slow loading, the later part as well. In otherwords, the ratio of the coefficients of these firstderivatives (in systematic notation, E1 /τ1 ) playsthe role of a dynamical Young’s modulus. Now, forthe rheological coefficients found by the above fit,this dynamical Young’s modulus turns out to be1.47 GPa, 24% higher than the static one. We re-mark that, as a consequence of the thermodynam-ical inequalities (39)–(42), the dynamical Young’smodulus is always larger than the static one [12].For more complicated rheologies – like the one wehave here – even higher order dynamical Young’smoduli are present (ratios of coefficients of higherderivatives). The second order dynamical Young’smodulus, for example, is already 1.84 GPa.
It is a generally valid warning from the rheologyof solids that customary ways of extracting Young’s
(a) (b)
Figure 6: Comparison of the theoretical predictionbased on the values of Table 1 (solid line) to the ex-perimental stress data (points). For information,the measured strain values (circles) are also dis-played (rescaled appropriately). Horizontal axes:time in s, vertical axes: stress in MPa. (a) Devia-toric case. (b) Spherical case.
modulus from longitudinal stress–strain curves mayresult in erroneously high values whenever rheologyis neglected. Notably, it is not only plastics [22] andsimilar materials where one may encounter rheol-ogy in solids: as an important application, the me-chanical description of rocks also requires the fullrheological model, as exploited in the ASR (Anelas-tic Strain Recovery) method for determining 3D insitu stress (see [23, 24, 25]).
8 Discussion
The presented theory is rich in the sense that itgrasps the elastic, thermal expansion, thermal con-duction, rheological and plastic aspects of solids.On the other side, for each of these aspects, the sim-plest available kinematic and constitutive choiceshave been made here, in order to make the com-parison with experimental data easy. These specificchoices have been found to be in conform with theexperiments that we have performed for illustra-tion. The framework is nevertheless general enoughto describe much more general processes and ma-terial behaviours as well, such as large deformationprocesses, material anisotropy, nonlinear elasticity,elaborated plastic effects, and all with nonconstantelasticity, thermal expansion, rheological and othercoefficients.
11

As for feasible future generalizations of the the-ory, first, one can mention allowing the Onsageriancoupling between the plastic and the rheologicalside as well. Second, non-Fourier heat conductioncan also be incorporated, unifying the internal vari-able approach [11] for rigid heat conductors withthe thermomechanical side described here. Dam-age and failure [26, 27] are more distant but alsoreasonable candidates to include via the same ther-modynamical methodology, along the lines of theworks [9, 10]. Temperature dependent complicatedrheological/viscoelastic situations in the finite de-formation regime [28] mean further challenges.
On the experimental side, our intention here wasto present examples for the involved various as-pects. These aspects, such as the Joule-Thomsoneffect and the Kluitenberg–Verhas rheology, havebeen found to be in good quantitative agreementwith the theory. In the future, with higher preci-sion and higher reliability measurements of the kindperformed here, a full quantitative agreement canbe achieved. For example, already the present dataallows us to approximately identify the plastic yieldstress value to be around 100 MPa (the stress levelwhere the transient takes place in Fig. 4a and tem-perature starts showing plastic dissipation), andthe ratio of the steepnesses before and after theplastic yield leads to an approximate prediction ofthe plastic rate coefficient [γ ≈ 0.17 in (22)] but amore elaborate approach is desirable. If the ex-perimental setup is able to provide fast enoughloading and unloading –needed for studying rhe-ology precisely – while all strain, force and temper-ature values are measured with high precision andreliability then, after fitting all the material con-stants involved, the numerical scheme explained inSect. 5 (and extended to also include thermal ex-pansion and plasticity) should be able to reproducethe whole time series precisely.
In addition to discussing the numerical schemefor predicting the time dependence of quantities,we have presented a method for fitting the rhe-ological coefficients, which succeeded in this tasksatisfactorily. We have emphasized the importanceof having transversal strain to be also measured,since this reduces the labour of fitting significantly,enabling to divide the problem into two separate,easily treatable, halves (deviatoric and spherical),while the composite uniaxial eight-parameter situ-ation may be found practically intractable.
Besides monitoring the mechanical quantities,measuring temperature provides valuable addi-tional information about the process of solid sam-ples. The elastic, rheological and plastic aspectsmake a clear footprint on the temperature time se-ries as well. Actually, because of the inherent in-tertwining of thermal and mechanical aspects, theset of equations is closed only when the tempera-ture variable is a full member of the set of variables.The thermodynamics-based approach enlights theimportance of temperature for processes that aretraditionally treated as mechanical-only.
The analysis of the experimental data has clearlyshown the relevance of rheology for plastics, andthe situation is known to be the same for seeminglymore ”solid” solids like rocks [23, 24, 25], which isthe base of the above-mentioned ASR method fordetermining 3D in situ stress. What seems nonlin-ear elasticity in the stress–strain plane may well berheology. However, another important remark tobe made is that delays in an experimental equip-ment (implementation of loading, controlling, mea-suring devices etc.) should not confused with rhe-ological delays acting within the sample. Much ex-perimental care is needed, in parallel to the propertheoretical interpretation, to identify the presenceof true rheology in solids. The applicational conse-quences of reliable rheological information are far-reaching (the long-time behaviour of undergroundtunnels, safety aspects of structural materials etc.).The interplay between thermal, elastic and rheo-logical effects is also remarkably important. Thethermodynamics-based description of solids pro-vides a reliable theoretical framework for all thesephenomena.
Acknowledgments
The work was supported by the grants OTKAK81161 and K116197. Financial support fromthe Bolyai Scholarship of the Hungarian Academyof Sciences is gratefully acknowledged by AttilaCsatar PhD.
12

A Technical details of themeasurement
The measurements have been carried out with anInstron 5581 universal material tester device, atthe Hungarian Institute of Agricultural Engineer-ing. The arrangement can be seen in Fig. 7.
Figure 7: The measuring arrangement
To track the longitudinal and lateral size changesof the tested sample, a tensiometric measuring de-vice was used. HBM 3/350 XY11 type strain gaugewas mounted onto the specimen (Fig. 8). The re-sistance of the gauge is R = 350Ω, and the gaugefactor is k = 1.98 (1%, according to the technicalparameters provided by the supplier.)
Figure 8: Strain gauge used for the measurement
Half bridge was used to test the specimen. Theactive gauge was the one mounted on the specimen,while the other gauge of the bridge was mountedon an unloaded metal plate. During the measure-ments, the half bridge was connected to an SR-55radio frequency module of a Spider-8 amplifier.
A ThermaCAM PM695 type real-time thermalcamera was used for temperature measurement andimaging. It monitored the area of the specimenindicated by dashed lines in Fig. 2. Besides theaverage temperature of the area and the maximal
temperature value within the area, the temperaturevalue at two fixed spots were also registered. Inparallel, temperature at some additional spots wasmonitored via infrared temperature sensor (sup-plier: Optrics GmbH, type: OPTCTLT10FCB3).
Standard specimens were used. After manufac-turing, the specimens were relieved from load, andwere calibrated after the gauges were mounted.The geometric dimensions of the specimen are dis-played in Fig. 2.
References
[1] T. Fulop and P. Van. Kinematic quantities offinite elastic and plastic deformation. Math.Meth. Appl. Sci., 35:1825–1841, 2012.
[2] T. Fulop. Thermal expansion, elastic stressand finite deformation kinematics. In 10th In-ternational Conference on Heat Engines andEnvironmental Protection, 23–25 May 2011,Balatonfured, Hungary, pages 227–232, Bu-dapest, 2011. Budapest University of Tech-nology and Economics, Department of EnergyEngineering.
[3] T. Fulop, P. Van, and A. Csatar. Elasticity,plasticity, rheology and thermal stress – an ir-reversible thermodynamical theory. In M. Pi-lotelli and G. P. Beretta, editors, 12th JointEuropean Thermodynamics Conference, JETC2013, Brescia, Italy, July 1–5, 2013, pages525–530, Brescia, 2013. Snoopy.
[4] T. Fulop, P. Van, and A. Csatar. Thermody-namical description of plastic processes. In Gy.Grof, editor, 11th International Conference onHeat Engines and Environmental Protection,June 3–5, 2013, Balatonfured, Hungary, pages147–152, Budapest, 2013. University of Tech-nology and Economics, Department of EnergyEngineering.
[5] T. Matolcsi. A Concept of MathematicalPhysics: Models for Spacetime. AkademiaiKiado, Budapest, 1984.
[6] T. Matolcsi. Spacetime Without ReferenceFrames. Akademiai Kiado, Budapest, 1993.
[7] T. Matolcsi. On material frame-indifference.Arch. Rational Mech. Anal., 91:99–118, 1986.
13

[8] T. Matolcsi and T. Gruber. Spacetime withoutreference frames: An application to the kinetictheory. International Journal of TheoreticalPhysics, 35:1523–1539, 1996.
[9] P. Van. Internal thermodynamic variables andthe failure of microcracked materials. Journalof Non-Equilibrium Thermodynamics, 26:167–189, 1996.
[10] P. Van and B. Vasarhelyi. Second Law ofthermodynamics and the failure of rock ma-terials. In D. Elsworth, J. P. Tinucci, andK. A. Heasley, editors, Rock Mechanics inthe National Interest: Proceedings of the 9thNorth American Rock Mechanics Symposium,Washington, USA, 2001, pages 767–773, Lisse,Abingdon, Exton (PA), Tokyo, 2001. BalkemaPublishers.
[11] P. Van and T. Fulop. Universality in heatconduction theory: Weakly nonlocal thermo-dynamics. Annalen der Physik, 524:470–478,2012.
[12] Cs. Asszonyi, T. Fulop, and P. Van. Distin-guished rheological models in the frameworkof a thermodynamical internal variable theory.Continuum Mechanics and Thermodynamics,2014. First online: 20 November 2014.
[13] P. Neff, B. Eidel, F. Osterbrink, and R. Mar-tin. A Riemannian approach to strain mea-sures in nonlinear elasticity. Comptes Ren-dus de l’Academie des Sciences, 342:254–257,2014.
[14] P. Neff, I. D. Ghiba, and J. Lankeit. The ex-ponentiated Hencky-logarithmic strain energy.Part I: Constitutive issues and rank-one con-vexity. Journal of Elasticity, 2015. First on-line: 27 March 2015.
[15] M. F. Beatty and D. O. Stalnaker. The Poissonfunction of finite elasticity. Journal of AppliedMechanics, 108:807–813, 1986.
[16] C. O. Horgan and J. G. Murphy. A gener-alization of Hencky’s strain-energy density tomodel the large deformations of slightly com-pressible solid rubber. Mechanics of Materials,79:943–950, 2009.
[17] J. Plesek and A. Kruisova. Formulation, vali-dation and numerical procedures for Hencky’selasticity model. Computers and Structures,84:1141–1150, 2006.
[18] O. T. Bruhns, H. Xiao, and A. Mayers. Consti-tutive inequalities for an isotropic elastic strainenergy function based on Hencky’s logarithmicstrain tensor. Proceedings of the Royal Societyof London A, 457:2207–2226, 2001.
[19] A. Rusinko and K. Rusinko. Plasticity andCreep of Metals. Springer-Verlag, Berlin Hei-delberg, 2011.
[20] V. A. Lubarda. On thermodynamic potentialsin linear thermoelasticity. International Jour-nal of Solids and Structures, 41:7377–7398,2004.
[21] J. Verhas. Thermodynamics and Rheology.Akademiai Kiado and Kluwer Academic Pub-lisher, Budapest, 1997.
[22] D. Kocsis and R. Horvath. Experience ac-quired in tensile tests of plastics. ScientificBulletin Series C: Fascile Mechanics, Tribol-ogy, Machine Manufacturing Technology, 27,2013.
[23] K. Matsuki and K. Takeuchi. Three-dimensional in situ stress determination byanelastic strain recovery of a rock core. In-ternational Journal of Rock Mechanics andMining Sciences & Geomechanics Abstracts,30:1019–1022, 1993.
[24] K. Matsuki. Anelastic strain recovery com-pliance of rocks and its application to in situstress measurement. International Journal ofRock Mechanics and Mining Sciences, 45:952–965, 2008.
[25] W. Lin, Y. Kuwahara, T. Satoh, N. Shige-matsu, Y. Kitagawa, T. Kiguchi, andN. Koizumi. A case study of 3D stress ori-entation determination in Shikoku Island andKii Peninsula, Japan. In I. Vrkljan, editor,Rock Engineering in Difficult Ground Con-ditions (Soft Rock and Karst), Proceedingsof Eurock’09 Cavtat, Croatia, October 28–29,2009, pages 277–282. Balkema, 2010.
14

[26] P. Van and B. Vasarhelyi. Sensitivity analy-sis of GSI based mechanical parameters of therock mass. Periodica Polytechnica–Civil Engi-neering, 58:379–386, 2014.
[27] F. Deak, P. Van, and B. Vasarhelyi. Hun-dred years after the first triaxial test. Peri-odica Polytechnica–Civil Engineering, 56:115–122, 2012.
[28] L. Palfi and K. Varadi. Characterization andimplementation of the viscoelastic propertiesof an EPDM rubber into FEA for energyloss prediction. Period. Polytech. Mech. Eng.,54:35–40, 2010.
15