Embed Size (px)
Citation preview

Ti
Ya
b
c
d
a
ARRA
KBOPPS
1
oRicl1aio
rfitpdoCeal
0d
BioSystems 104 (2011) 77–86
Contents lists available at ScienceDirect
BioSystems
journa l homepage: www.e lsev ier .com/ locate /b iosystems
heoretical approach to modelling and analysis of the bioprocess with productnhibition and impulse effect
uan Tiana,c, Andrzej Kasperskib,∗, Kaibiao Sund, Lansun Chenc
School of Information Engineering, Dalian University, Dalian 116622, People’s Republic of ChinaFaculty of Mathematics, Computer Science and Econometrics, Bioinformatics Factory, University of Zielona Gora, Szafrana 4a, 65-516 Zielona Gora, PolandSchool of Mathematical Science, Dalian University of Technology, Dalian 116024, People’s Republic of ChinaSchool of Control Science and Engineering, Dalian University of Technology, Dalian 116024, People’s Republic of China
r t i c l e i n f o
rticle history:eceived 24 May 2010eceived in revised form 24 August 2010
a b s t r a c t
This work presents the first mathematical model of a bioprocess with product inhibition and impulseeffect. To begin with, an exemplary mathematical bioprocess model with product inhibition and impulseeffect is formulated. Then, according to the model, the analysis of bioprocess stability is presented. The
ccepted 5 January 2011
eywords:ioprocess with impulse effectptimization
article expresses the product oscillation period, which provides the precise feeding time frame for theregulator bioprocess to achieve an equivalent stable output as that of a bioprocess with impulse effect inthe same production environment. Moreover, in this work, the optimization of the production processwith respect to the tunable parameters is investigated, and analytical expressions of their optimal valuesare provided. Numerical simulations using biological data are presented to illustrate the main results.
eriodic solutionroduct inhibitiontability
. Introduction
The products accumulation in a medium inhibits the growthf microorganism and decreases the productivity of bioprocesses.esearch on microorganisms’ physiology provides new insights
nto the mechanisms of product inhibition that leads to reducedosts of fermentation products such as acetone, butanol, ethanol,actic acid and l-glutamic acid (LGA) (Dutta et al., 1996; Herrero,983; Iyer and Lee, 1999; Suresh et al., 2009). This work is a newpproach to model bioprocesses with the product inhibition andmpulse effect. Especially, there is presented the way how this typef processes can be analyzed and optimized.
Many biological phenomena involving thresholds, burstinghythm models in medicine and biology, pharmacokinetics andrequency modulated systems do exhibit impulse effects. Thus,mpulsive differential equations appear as a natural descrip-ion of observed evolution phenomena of several real worldroblems (Lakshmikantham et al., 1989). Many papers have intro-uced impulsive differential equations in their dynamics and havebtained some interesting results (Liu and Chen, 2003; Meng and
hen, 2008; Sun and Chen, 2008; Tang and Chen, 2002, 2004a; Zengt al., 2006; Jiang et al., 2007a,?). Tang and Chen (2004b) introducedLotka–Voterra model with state-dependent impulsion and ana-yzed the existence and stability of a positive period-1 solution. In
∗ Corresponding author. Tel.: +48 68 328 2802; fax: +48 68 328 2801.E-mail address: [email protected] (A. Kasperski).
303-2647/$ – see front matter © 2011 Elsevier Ireland Ltd. All rights reserved.oi:10.1016/j.biosystems.2011.01.003
© 2011 Elsevier Ireland Ltd. All rights reserved.
the microbial process, Guo and Chen (2009a,b), Sun et al. (2010a,b)and Tian et al. (2010a,b) have studied state-dependent modelswith impulsive state control by applying the Poincaré principleand Poincaré–Bendixson of the impulsive differential equation.However, neither of the investigators accounted for the inhibitoryproducts influence in formulating a mathematical model for a bio-process with impulse effect.
This article concerns a modelling approach to the impulsiveprocess with product inhibition. The paper is organized as follows.In Section 2 on the base of formal kinetic approach, a mathematicalbioprocess model with product inhibition and impulse effect isintroduced. In Section 3, the dynamic behavior of the bioprocess ispresented. In Section 4, the asymptotic behavior of the bioprocess’solution is discussed. Following this in Section 5, simulationsare given to verify the theoretical results. The simulations of theproposed process has been carried out by using the experimentaldata (including the process parameters) collected from Khan et al.(2005). Then, in order to optimize the bioprocess, the optimiza-tion with respect to the tunable parameters is investigated, andanalytical expressions of their optimal values are provided. Thelast section is a discussion of the main results and their biologicalimplications. The mathematical proofs of the main results aregiven in Appendix A.
2. Mathematical Model
The modelling of the bioprocess, with product inhibition andimpulse effect, is presented through the example of production of

7 stems
LbmasDswt(pt
dmttpirf
�
ws�u(
i
wt(
Rptwbpw
wYt
tttbt
8 Y. Tian et al. / BioSy
GA by Corynebacterium glutamicum. This process has been chosenecause of its huge industrial importance. LGA is produced com-ercially under aerobic fermentation conditions (i.e. good aeration
nd high substrate concentration), and the C. glutamicum undergotresses (Akerberg et al., 1998; Chisti et al., 2001; Hartmann andelgado, 2004; Henzler, 2000; Toma et al., 2000). Moreover, the
pecific growth rate of C. glutamicum is continuously decreasingith the increase of product concentration (i.e. product inhibi-
ion occurs) and a low level of dissolved oxygen concentrationKasperski, 2008; Kasperski and Miskiewicz, 2008). Studies on thisrocess focus particularly on better definition of its terms in ordero minimize stress effects and to optimize the process.
In general, the kinetic model with product inhibition can be sub-ivided into a growth model, a substrate model, and a productodel. Bona and Moser (1997) point out significant results from
he kinetic analysis of the LGA production process: i) experimen-al measurements exhibit a deviation from Monod’s kinetics. Theroduct formation causes a decrease of the specific growth rate,
.e. growth inhibition by product occurs. ii) the specific growthate (�) decreases permanently once the product has started toorm.
Thus, this formal macroscopic model concludes that
dX
dt= �X, (1)
= �maxS
S + KS(1 + P/KP), (see Bona and Moser,1997)
here X(t) denotes the biomass concentration (g l−1); S(t) the sub-trate concentration (g l−1); P(t) the product concentration (g l−1);max the maximal specific growth rate (h−1); KS the substrate sat-ration constant (g l−1); KP growth inhibition constant by productg l−1).
For the growth-associated product formation conditions, theres (Suresh et al., 2009):
dP
dt= YP/X
dX
dtfor P < Pmax (2)
here YP/X denotes the growth-associated constant (g g−1); Pmax
he maximum product concentration in the bioreactor mediumg l−1).
emark 1. For P ≥ Pmax, cell growth ceases (i.e., dX/dt = 0) and theroduct formation is nongrowth associated. In those conditionshe biomass concentration gradually decreases after each cycle,hich causes instability of the proposed system. As a result, all
iomass will be washed out from the bioreactor and will stop therocess. For that reason only the P < Pmax case is considered in thisork.
The substrate utilization is therefore written as
dS
dt= − 1
YX/S
dX
dt− 1
YP/S
dP
dt, (see Bona and Moser,1997) (3)
here YX/S denotes yield coefficient biomass from substrate (g g−1);P/S yield coefficient product from substrate (g g−1). Initial condi-ions: X(0) = X0, S(0) = S0 and P(0) = 0.
In accordance with Remark 1 the product concentration has
o be controlled below a threshold PSET (where 0 < PSET < Pmax) inhe proposed system. Once the product concentration reaches thehreshold PSET, part of the medium containing the product, theiomass and the substrate is discharged from the bioreactor, andhe next portion of the medium of a given substrate concentration104 (2011) 77–86
inputted. Therefore, the model (1)–(3) can be formulated as:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
dX
dt= �max
S
S + KS(1 + P/KP)X
dP
dt= YP/X�max
S
S + KS(1 + P/KP)X
dS
dt= − 1
YX/S
dX
dt− 1
YP/S
dP
dt
⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎭
P < PSET
�X = −Wf X
�P = −Wf P
�S = Wf (SF − S)
⎫⎬⎭ P = PSET
X(0) = X0, P(0) = 0, S(0) = S0
, (4)
where SF is the concentration of the feed substrate which is inputtedimpulsively, 0 < Wf < 1 is the part of product which is removed fromthe bioreactor in each product oscillation cycle.
3. The Dynamic Behavior of the System (4)
In this section, the dynamic behavior of the system (4) is ana-lyzed by the analytic method. By the third equation of (4)
dP
dS= − YP/SYP/XYX/S
YP/S + YP/XYX/S:= �. (5)
Hence
P = YP/X (X − X0) = �(S − S0). (6)
3.1. Period-1 Solution
Theorem 1. If the threshold PSET and the feeding substrate concen-tration SF satisfy the condition PSET < − �SF, then the system (4) has aunique period-1 solution with S0 ≥ − PSET/�.
Theorem 1 indicates that PSET should be low enough in orderto ensure that the substrate will not be depleted from the growthmedium within a cycle. In this case, growth could stop and thethreshold PSET never reached.
3.2. Expression of the Product Oscillation Period T
In the last subsection, it is shown that the system (4) has aperiod-1 solution. In this subsection the expression of productoscillation period T is given.
Firstly, it follows by the first three equations of the system (4),Eq. (6) and Eq. (A.5) (see Appendix A) that
dt = S + KS(1 + �(S − SF )/KP)�maxS(S − SF )
dS.
Then, travelling along P(S) = �(S − SF), X(S) = �(S − SF)/YP/X fromthe point M0(S0, X0, P0), with t = tM0 , to the point M1(ST, XT, PT),with t = tM1 , in the counterclockwise direction yields
T = tM1 − tM0 =∫ ST
S0
S + KS(1 + �(S − SF )/KP)�maxS(S − SF )
dS.
The above result can be summarized in the following theorem.
Theorem 2. The product oscillation period T can be determined bythe following equation
(KP − �SF )KS
(SF + (1 − Wf )PSET /�
)
T =�maxKPSFln
SF + PSET /�
− KS + SF
�maxSFln(1 − Wf ). (7)

Y. Tian et al. / BioSystems 104 (2011) 77–86 79
0 20 40 600
2
4
Time (h) B
iom
ass
(gl−
1 )
0 20 40 600
5
10
15
Time (h)
Pro
duct
(gl
−1 )
0 20 40 600
20
40
60
Time (h)
Sub
stra
te (
gl−
1 )
0 20 40 600
5
10
15
Substrate (gl−1)
Pro
duct
(gl
−1 )
0 1 2 3 40
5
10
15
Pro
duct
(gl
−1 )
0 20 40 600
2
4
Bio
mas
s (g
l−1 )
a b
d
fe
c
F rationP 1, KS =
fte
3
Ts
4
pTc
X
Ti⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩ItiA
Biomass (gl−1)
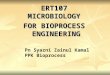
ig. 1. Theorem 1 – Presentation of the unstable case. The change of biomass concentarameters: (X0, P0, S0) = (0.164, 0, 49.87), PSET = 10 g l−1, SF = 20 g l−1, �max = 0.163 h−
Note that Eq. (7) also provides the precise feeding time frameor a regular bioprocess to achieve an equivalent stable output ashat of a bioprocess with impulse effect in the same productionnvironment.
.3. Period-2 Solution
heorem 3. For any PSET and SF, there does not exist any period-2olution in the system (4).
Theorem 3 indicates that the system (4) is not in chaos.
. Asymptotic Behavior of the System’s Solution
In the Section 3, it was shown that the system (4) had aeriod-1 solution (�(t), �(t), �(t)) (see Appendix A.3) with perioddetermined by Eq. (7). Moreover, in the steady state, the biomassoncentration is determinate, i.e.,
= �(S − SF )/YP/X. (8)
herefore, in a steady state, the system (4) is reduced to the follow-ng two-variable system
dS
dt= �max
�
S
S + KS(1 + P/KP)P
dP
dt= �max
S
S + KS(1 + P/KP)P
⎫⎪⎬⎪⎭ P < PSET
�P = −Wf P
�S = Wf (SF − S)
}P = PSET
. (9)
t can be shown easily that S = �(t), P = �(t) is a period-1 solution ofhe system (9). According to the definitions of orbitally asymptot-cally stable and enjoying the property of asymptotic phase (seeppendix A.1), the following theorem holds true.
Substrate (gl−1)
(a), product concentration (b), substrate concentration (c) and phase diagrams (d–f).0.164 g l−1, KP = 3.88 g l−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1 and YP/S = 0.584 g g−1.
Theorem 4. The T-periodic solution (�(t), �(t)) of the system (9)determined in Theorem 1 is orbitally asymptotically stable and enjoy-ing the property of asymptotic phase.
The stability of an orbit characterizes whether nearby (i.e., per-turbed) orbits will remain in the neighborhood of that orbit, or berepelled away from it. Asymptotic stability additionally character-izes the attraction of nearby orbits to this orbit in the long-timelimit.
5. Discussions and Numerical Simulations
The feedback control of the bioprocess, with product inhibi-tion for pulse dosage supply of substrates and removal of productshas been analyzed theoretically. The results are new and signifi-cant, which not only provides the possibility of a check of systemdynamic property including the existence and stability of period-1solution of the bioprocess, but also the possibility of a calculationof the product oscillation period. Moreover, the results provide thepossibility of making simulation of real process according to themathematical models determined in the article. In order to ver-ify the received results, the following numerical simulations aregiven.
5.1. Numerical Simulations
In the following, the kinetic values of model parameters givenby Suresh et al. (2009) as obtained by using the data of Khanet al. (2005) are used to test our results, i.e., �max = 0.163 h−1,KS = 0.164 g l−1, KP = 3.88 g l−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1,YP/S = 0.584 g g−1. Thus � = − 0.46. In addition, it is assumed that the
initial substrate concentration 49.87 g l−1, i.e. S0 = 49.87 g l−1, theinitial biomass concentration is 0.164 g l−1, i.e. X0 = 0.164 g l−1 andthe maximal product concentration is 24 g l−1, i.e., Pmax = 24 g l−1.According to Theorem 1, the threshold is set to be 10 g l−1, i.e.,PSET = 10 g l−1 < min {Pmax, − �S0}. The following simulations are
80 Y. Tian et al. / BioSystems 104 (2011) 77–86
0 20 40 600
2
4
Time (h) B
iom
ass
(gl−
1 )0 20 40 60
0
5
10
15
Time (h)
Pro
duct
(gl
−1 )
0 20 40 6020
30
40
50
Time (h)
Sub
stra
te (
gl−
1 )
20 30 40 500
5
10
15
Substrate (gl−1)
Pro
duct
(gl
−1 )
0 1 2 3 40
5
10
15
Biomass (gl−1)
Pro
duct
(gl
−1 )
20 30 40 500
2
4
Substrate (gl−1)
Bio
mas
s (g
l−1 )
RANGES
RA
NG
EP
RA
NG
EP
RANGEX
RA
NG
EX
RANGES
a b
dc
e f
F tion (a), product concentration (b), substrate concentration (c) and phase diagrams (d–f).P −1, KS = 0.164 g l−1, KP = 3.88 g l−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1 and YP/S = 0.584 g g−1,w e oscillation range in steady state, RANGEX – the biomass oscillation range in steady state.
cp
iF(r
6s1rtw
p7w
5
c
5
pA
P
w
P
0 5 10 15 200
2
4
6
8
10
0 5 10 15 200
5
10
15
20
25
30
35
40
45
50
Bio
mas
s an
d P
rod
uct
co
nce
ntr
atio
n (
gl−1
)
Su
bst
rate
co
nce
ntr
atio
n (
gl−1
)
Substrate
Product
Biomass
Time (h)
ig. 2. Theorem 1 – Presentation of the stable case. The change of biomass concentraarameters: (X0, P0, S0) = (0.164, 0, 49.87), PSET = 10 g l−1, SF = 60 g l−1, �max = 0.163 hhere RANGEP – the product oscillation range in steady state, RANGES – the substrat
arried out by changing one main parameter SF and fixing all otherarameters.
Firstly, the feeding substrate concentration is set to be 20 g l−1,.e., SF = 20 g l−1. The time series and phase diagrams are shown inig. 1. In this case, SF < − PSET/�, according to Theorem 1 the system4) does not have period-1 solution and the bioprocess is inter-upted after several product oscillations.
Secondly, the feeding substrate concentration is set to be0 g l−1, i.e., SF = 60 g l−1. The time series and phase diagrams arehown in Fig. 2. In this case, SF > − PSET/�, according to Theorem, the system (4) has a unique period-1 solution. The simulationesults from the beginning of the process to the first removing ofhe part of the medium, which can be seen in Fig. 3, this is consistentith Fig. 4b) in Suresh’s work (Suresh et al., 2009).
Fig. 4 presents the time series and phase diagrams of the exacteriod-1 solution starting from the initial point (X0, P0, S0) = (2.288,.5, 43.664), and the product oscillation period is T = 1.7878 h,hich is consistent with the computing result by Eq. (7).
.2. Optimization of the Bioprocess
In this section, the aspect of bioprocess optimization is dis-ussed.
.2.1. The Optimization CriterionThe optimization consists of finding the maximum of the pro-
osed objective function (PRODout) under the constraints (seeppendix A.2 (a)–(c)) in the steady state, i.e.,
ROD → max,
outhere
RODout(Wf , PSET , SF ) = Wf PSET
T. (10)
Fig. 3. The simulation results from the beginning of the process to the firstremoval of this part of the medium. Parameters: (X0, P0, S0) = (0.164, 0,49.87), PSET = 10 g l−1, SF = 60 g l−1, �max = 0.163 h−1, KS = 0.164 g l−1, KP = 3.88 g l−1,YP/X = 3.278 g g−1, YX/S = 0.655 g g−1 and YP/S = 0.584 g g−1.

Y. Tian et al. / BioSystems 104 (2011) 77–86 81
0 20 40 60
2.4
2.6
2.8
3
Time (h) B
iom
ass
(gl−
1 )
0 20 40 60
8
9
10
Time (h)
Pro
duct
(gl
−1 )
0 20 40 60
39
40
41
42
43
Time (h)
Sub
stra
te (
gl−
1 )
39 40 41 42 43
8
9
10
Substrate (gl−1)
Pro
duct
(gl
−1 )
2.4 2.6 2.8 3
8
9
10
Biomass (gl−1)
Pro
duct
(gl
−1 )
39 40 41 42 43
2.4
2.6
2.8
3
Substrate (gl−1) B
iom
ass
(gl−
1 )
a b
d
fe
c
F ass cod −1, �m
Y
5
s
T
Fa
ig. 4. Theorem 1 – Presentation of the asymptotic behavior. The change of biomiagrams (d–f). Parameters: (X0, P0, S0) = (2.288, 7.5, 43.664), PSET = 10 g l−1, SF = 60 g lP/S = 0.584 g g−1.
PRODout – the product productivity (g l−1 h−1);T – the period of the product oscillation (h).
.2.2. Determination of the Optimal ResultAccording to Eq. (7) the product oscillation period in the steady
tate is
(Wf , PSET , SF ) = (KP − �SF )KS
�maxKPSFln
(SF + (1 − Wf )PSET /�
SF + PSET /�
)
− KS + SF
�maxSFln(1 − Wf ).
0
2
4
6
0
0.5
1
1.5
20
2
4
6
8
10
KP
KS
T
*
(0.164,3.88, 1.7878)
a b
ig. 5. The sensitivity of T to KS and KP: (a) 3D-plot; (b) contour-plot. Parameters: Wf = 0nd YP/S = 0.584 g g−1.
ncentration (a), product concentration (b), substrate concentration (c) and phaseax = 0.163 h−1, KS = 0.164 g l−1, KP = 3.88 g l−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1 and
Therefore, T(0, PSET, SF) = 0. The sensitivity of T to KS and KP for givenWf = 0.25, PSET = 10 g l−1 and SF = 60 g l−1 is shown in Fig. 5.
Then the objective function can be formulated as
PRODout(Wf , PSET , SF ) = Wf PSET
T(Wf , PSET , SF ). (11)
The dependence of PRODout on Wf and SF for given PSET = 10 g l−1
is shown in Fig. 6, and the dependence of PRODout on Wf and PSET
for given SF = 60 g l−1 is shown in Fig. 7.To optimize the bioprocess it is necessary to find the max-imum of the objective function (11) under the constraints 0 <Wf ≤ Wfmax < 1, 0 < SF ≤ SFmax and 0 < PSET ≤ min{M(SF ), Pmax}(see Appendix A.2).
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
KP
KS
2
2
2
33
3
44
45
55
66
67
77
88
899
9
T = 1.7878 h
*
.25, PSET = 10 g l−1, SF = 60 g l−1, �max = 0.163 h−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1

82 Y. Tian et al. / BioSystems 104 (2011) 77–86
0
100
200
0
0.5
10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
SF Wf
PRO
D out
50 100 150 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
SF
Wf
0.2
0.2
0.2
0.2
0.4
0.4
0.4
0.4
0.6
0.6
0.6
0.6
0.80.8
0.8
1
11
1.21.2
1.2
1.4
1.4
1.6
a b
Fig. 6. The dependence of PRODout on Wf and SF: (a) 3D-plot; (b) contour-plot. Parameters: PSET = 10 g l−1, �max = 0.163 h−1, KS = 0.164 g l−1, KP = 3.88 g l−1, YP/X = 3.278 g g−1,YX/S = 0.655 g g−1 and YP/S = 0.584 g g−1.
0 10 200
0.5
10
0.5
1
1.5
2
2.5
3
3.5
PSET
Wf
PRO
D out
0 5 10 15 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
PSET
Wf
0.5
0.5
0.5
1
1
1
1.5
1.5
1.5
2
2
2.5
2.5
3
a b
Fig. 7. The dependence of PRODout on Wf and PSET: (a) 3D-plot; (b) contour-plot. Parameters: SF = 60 g l−1, Pmax = 24 g l−1, �max = 0.163 h−1, KS = 0.164 g l−1, KP = 3.88 g l−1,YP/X = 3.278 g g−1, YX/S = 0.655 g g−1 and YP/S = 0.584 g g−1.
Fa
ig. 8. The sensitivity of PRODoutopt to KS and KP: (a) 3D-plot; (b) contour-plot. Parametend YP/S = 0.584 g g−1.
rs: PSET = 10 g l−1, SF = 200 g l−1, �max = 0.163 h−1, YP/X = 3.278 g g−1, YX/S = 0.655 g g−1

stems
T
P
mo
sf
Tam
P
T
P
w
ais
6
pnopitimItMwrclowtipstotptf
Y. Tian et al. / BioSy
heorem 5. For given PSET and SF ≥ − PSET/�, there is
ROD(1)out(PSET , SF ) = lim
Wf →0PRODout(Wf , PSET , SF )
= �maxKPPSET (�SF + PSET )�KPSF + �KSPSET + KP(�KS + PSET )
. (12)
The maximum of PROD(1)out can be achieved by finding the maxi-
um of Eq. (12) with respect to SF. Taking the first partial derivativef PROD(1)
out with respect to SF, there is
∂PROD(1)out
∂SF= �maxKPPSET KS�2(PSET + KP)
(�KPSF + �KSPSET + �KPKS + KPPSET )2> 0,
o PROD(1)out achieves its maximum when SF → SFmax . Therefore, the
ollowing result holds.
heorem 6. For given PSET, the product productivity (PRODout)chieves its maximum when Wf → 0 and SF → SFmax , and the maxi-um is
RODoutopt (PSET ) = limWf →0,SF →SFmax
PRODout(Wf , PSET , SF )
= �maxKPPSET (�SFmax + PSET )�KPSFmax + �KSPSET + KP(�KS + PSET )
. (13)
heorem 7. For given PSET > KS and SFmax � PSET , there is
RODoutopt (PSET ) � �maxPSET , (14)
here PSET < −�SFmax .
The sensitivity of PRODoutopt to KS and KP for given PSET = 10 g l−1
nd SF = SFmax = 200 g l−1 is shown in Fig. 8, which presents thempact of the growth inhibition constant by product KP and theubstrate saturation constant KS on PRODoutopt .
. Conclusions
The article put forward a new model of bioprocesses withroduct inhibition and impulse effect. The product inhibition phe-omenon was presented through the example of the productionf l-glutamic acid (LGA) by C. glutamicum. The modelling of thisrocess is especially important because LGA is one of the most
mportant commercial amino acid. The work is the first presen-ation in literature of a bioprocess with product inhibition andmpulse effect, indicates directions for future research. By analytical
ethod, the dynamic property of the bioprocess was investigated.t was shown in Theorem 1 that if the parameters satisfy PSET < − �SF,hen the system (4) had a unique periodic solution (�(t), �(t), �(t)).
eanwhile, numerical simulations to verify the theoretical resultsere presented. The results were in accordance with the results
eceived by Suresh et al. (2009) by using the experimental dataollected from Khan et al. (2005). In Fig. 3 it was seen that the simu-ation results from the beginning of the process to the first removalf part of the medium, were consistent with Fig. 4b in Suresh’sork (Suresh et al., 2009). In addition, the complete expression of
he product oscillation period was given, by which the model withmpulsive state feedback control can be changed into a model witheriodic control. Moreover, the work pointed out that the proposedolution provided in an easy way, control of product concentra-ion. Finally, it was shown that during the product productivity
ptimization, the bioprocess with impulse effect strived for a con-inuous bioprocess (Theorem 5). In this case the maximum productroductivity was received, but the possibility of synchronization ofhe bioprocesses was lost. To sum up, analytical results based on aormal mathematical analysis of the bioprocess dynamics, gave the104 (2011) 77–86 83
possibility of establishing general and more systematic operationand control strategies based on the counteraction of the mecha-nisms underlying the adverse effect of the bioprocess dynamics.
Acknowledgements
This research was supported in part by the National Natural Sci-ence Foundation of China (No. 61074044, Major Research Plan No.90818025), Specialized Research Fund for the Doctoral Program ofHigher Education of China (No. 20090041110003) and the Funda-mental Research Funds for the Central Universities.
Appendix A.
A.1. Basic Definitions and Preliminary
Let x = −→ϕ (t) = (ϕ1(t), ϕ2(t), ϕ3(t)), t ∈R+ be a solutionof the system (4) with moments of the impulse effectk: 0 < 1 < 2 < · · ·, lim k→∞k = ∞ and C+(x) = {x ∈Rn : x =(ϕ1(t), ϕ2(t), ϕ3(t)), t ∈R+}. Let x(t;t0, x0) denote the solutionfor which x(t+
0 ; t0, x0) = x0 and let J+(t0, x0) denote the rightmaximal interval of existence of this solution.
Definition 1. (Bainov and Simeonov, 1993) The solution x = (�(t),�(t), �(t)) is said to be period-1 if in a minimum cycle time, there isone impulse effect. Similarly, the solution x = (�(t), �(t), �(t)) is saidto be period-2 if in a minimum cycle time, there are two impulseeffects.
Proposition 1. Let x = (�(t), �(t), �(t)) be a T- period-1 solu-tion of the system (4). Denote �0 = �(t+
0 ), �0 = �(t+0 ), �0 = �(t+
0 ),�1 = �(t0 + T), �1 = �(t0 + T), �1 = �(t0 + T) = PSET, �+
1 = �((t0 + T)+),�+
1 = �((t0 + T)+) and �+1 = �((t0 + T)+). Then, there is
�0 = Wf SF + (1 − Wf )�1, �0 = (1 − Wf )�1, �0 = (1 − Wf )PSET . (A.1)
Proposition 2. Let x = (�̄(t), �̄(t), �̄(t)) be a period-2 solu-tion of the system (4). Denote �̄0 = �̄(t+
0 ), �̄0 = �̄(t+0 ), �̄0 =
�̄(t+0 ), t0 < t1 < t0 + T, �̄1 = �̄(t1), �̄1 = �̄(t1), �̄1 = �̄(t1) = PSET , �̄+
1 =�̄(t+
1 ), �̄+1 = �̄(t+
1 ), �̄+1 = �̄(t+
1 ), �̄2 = �̄(t0 + T), �̄2 = �̄(t0 + T), �̄2 =�̄(t0 + T) = PSET , �̄+
2 = �̄((t0 + T)+), �̄+2 = �̄((t0 + T)+) and �̄+
2 =�̄((t0 + T)+). Then, there is
�̄0 = Wf SF + (1 − Wf )�̄2, �̄+1 = Wf SF + (1 − Wf )�̄1
�̄0 = (1 − Wf )�̄2, �̄+1 = (1 − Wf )�̄1,
�̄0 = (1 − Wf )�̄2 = (1 − Wf )PSET , �̄+1 = (1 − Wf )�̄1 = (1 − Wf )PSET ,
(A.2)
where �̄2 /= �̄1 or �̄2 /= �̄1 holds true.
Definition 2. (Bainov and Simeonov, 1993) The solution x = ϕ(t) issaid to be:
1. Orbitally stable if
(∀ε > 0)(∀� > 0)(∀t0 ∈R+, |t0 − k| > �)(∃ı > 0)(∀x0 ∈Rn, d(x0, C+(x)) < ı, x0 /∈ B̄�
(−→ϕ (k)) ∪ B̄�(−→ϕ (+k
)))(∀t ∈∀J+(t0, x0))d(x(t; t0, x0), C+(x)) < ε;
2. Orbitally attractive if
(∀� > 0)(∀t0 ∈R+, |t0 − k| > �)(∃� > 0)(∀x0 ∈Rn, d(x0, C+(x)) < �, x0 /∈ B̄�(−→ϕ (k)) ∪ B̄�
(−→ϕ (+k
)))(∀ε > 0)(∃ > 0)t0 + ∈ J+(t0, x0)(∀t ≥ t0 + , t ∈ J+(t0, x0))d(x(t; t0, x0), C+(x)) < ε;

84 Y. Tian et al. / BioSystems
Fig. A.1. Orbital stability.
F
3
ia
Di
LC{
it
�
�
A
A�
A
M
(
ig. A.2. Asymptotic orbital stability, where corrects for the “asymptotic phase”.
. Orbitally asymptotically stable if it is orbitally stable andorbitally attractive.
An orbit C+(x) is orbitally stable if every orbit C+(x̂) with nearbynitial points remain close in this sense. Note that C+(x̂) need notpproach C+(x) (see Figs. A.1 and A.2).
efinition 3. (Bainov and Simeonov, 1993) The solution x = −→ϕ (t)s said to enjoy the property of asymptotic phase if
(∀� > 0)(∀t0 ∈R+, |t0 − k| > �)(∃� > 0)(∀x0 ∈Rn, d(x0, −→ϕ (t0)) < �)(∃c ∈R)(∀ε > 0)(∃ > |c|)t0 + ∈ J+(t0, x0)(∀t ≥ t0 + , t ∈ J+(t0, x0), |t0 − k| > �)d(x(t + c; t0, −→ϕ (t))) < ε.
emma 1. (Bainov and Simeonov, 1993) (Analogue of Poincaré’riterion) The T – periodic solution S = �(t) ,P = �(t) of the system
dS
dt= A(S, P),
dP
dt= B(S, P), if �(S, P) /= 0
�S = ˛(S, P), �P = ˇ(S, P), if �(S, P) = 0, (A.3)
s orbitally asymptotically stable and enjoying the property of asymp-otic phase if the multiplier�2 satisfies the condition | �2 |<1 . Where
2 =q∏
k=1
�k exp
(∫ T
0
[∂A
∂S(�(t), �(t)) + ∂B
∂P(�(t), �(t))
]dt
),
k =A+
(∂ˇ∂P
∂�∂S
− ∂ˇ∂S
∂�∂P
+ ∂�∂S
)A ∂�
∂S+ B ∂�
∂P
+B+
(∂˛∂S
∂�∂P
− ∂˛∂P
∂�∂S
+ ∂�∂P
)A ∂�
∂S+ B ∂�
∂P
,
+ = A(�(+k
), �(+k
)), B+ = B(�(+k
), �(+k
)) and
, B, ∂˛∂S
, ∂˛∂P
, ∂ˇ∂S
, ∂ˇ∂P
, ∂�∂S
, ∂�∂P
are calculated at the point (�(k),(k)) andq is the order of the periodic solution.
.2. The Constraints in the Bioprocess Optimization
Let
(SF ) = −�SF
√KP(SF + KS)
(√
KP(SF + KS) +√
KS(SF − �SF )),
104 (2011) 77–86
then the constraints in the optimization are as follows:
(a) 0 < Wf ≤ Wfmax < 1- Wf – the part of product which is removed from the bioreactor
in each product oscillation cycle,- Wfmax – the maximal part of product which is removed from the
bioreactor in each product oscillation cycle,b) 0 < SF ≤ SFmax
- SF – the concentration of the feed substrate,- SFmax – maximum dosaged substrate concentration.
(c) 0 < PSET ≤ min{M(SF ), Pmax}- PSET – the threshold of the product concentration in the biore-
actor medium,- Pmax – the maximal level of product concentration in the biore-
actor medium.
A.3. Proofs of the Main Results
Proof of Theorem 1. Integrate two sides of Eq. (5) from 0 to t, wehave
P(t) = �(S(t) − S0). (A.4)
It can be easily obtained from (A.2) that if the impulse effect hap-pens, the condition S0 ≥ − PSET/� is necessary.
For t ∈ (t0, t0 + T], the solution S = �(t), X = �(t) and P = �(t) of thesystem (4) satisfies that
�(t) − �0 = �(�(t) − �0).
In particular, for t = t0 + T, there is
�(t0 + T) − �0 = �(�(t0 + T) − �0).
In view of Eq. (A.1), there is
Wf PSET = �(�1 − �0) = �Wf (�1 − SF ),
which implies that �1 = SF + PSET/� or
�0 = Wf SF + (1 − Wf )(SF + PSET /�) = SF + (1 − Wf )PSET /�. (A.5)
If PSET < − �SF, then there is �1 > 0. Therefore, if the threshold PSETand the feeding substrate concentration SF satisfy the conditionPSET < − �SF, then the system (4) has a unique period-1 solution withS0 ≥ − PSET/�. �
Proof of Theorem 2. Suppose that the system (4) has a period-2 solution S = �̄(t), X = �̄(t) and P = �̄(t). Then for t ∈ (t0, t1], thesolution S = �̄(t), X = �̄(t) and P = �̄(t) satisfies that
�̄(t) − �̄0 = �(�̄(t) − �̄0).
And for t ∈ (t1, t0 + T] there is
�̄(t) − �̄+1 = �(�̄(t) − �̄+
1 ).
In particular, for t = t1, there is
�̄1 − �̄0 = �(�̄1 − �̄0). (A.6)
For t = t0 + T, there is
�̄2 − �̄+1 = �(�̄2 − �̄+
1 ). (A.7)
By subtracting Eq. (A.5) from Eq. (A.7) that
�̄2 − �̄1 + �̄0 − �̄+1 = �(�̄2 − �̄1 + �̄0 − �̄+
1 ).
In view of Eq. (A.2), there is
�̄+1 − �̄0 = �̄2 − �̄1
or
(�̄+1 − �̄0)(�̄2 − �̄1) ≥ 0. (A.8)

stems
O
�
(
Ests
PtT��
t
OA
Y. Tian et al. / BioSy
n the other hand, in view of Eq. (A.2) there is
¯+1 − �̄0 = (1 − Wf )(�̄1 − �̄2).
Then
�̄+1 − �̄0)(�̄2 − �̄1) = −(1 − Wf )(�̄2 − �̄1)
2 ≤ 0. (A.9)
qs. (A.8) and (A.9) indicate that �̄2 = �̄1. In a similar way it can behown that �̄2 = �̄1. This is contract to the definition of the defini-ion of period-2 solution. Therefore, there does not exist a period-2olution in the system (4). �
roof of Theorem 4. According to Lemma A.1, the multiplies ofhe system (9) can be computed in variations corresponding to the-periodic solution (�(t), �(t)). Denote N0(�0, �0), N1(�1, �1), where0 = WfSF + (1 − Wf)(SF + PSET/�), �1 = SF + PSET/�, �0 = (1 − Wf)PSET and1 = PSET. In the system (9), there is
A(S, P) = �max
�
SP
S + KS(1 + P/KP), B(S, P) = �max
SP
S + KS(1 + P/KP),
˛(S, P) = Wf (SF − S), ˇ(S, P) = −Wf P, �(S, P) = P − PSET ,
hen
∂A
∂S= �maxKSP(1 + P/KP)
�(S + KS(1 + P/KP))2,
∂B
∂P= �maxS(KS + S)
(S + KS(1 + P/KP))2,
∂˛
∂S= ∂ˇ
∂P= −Wf ,
∂˛
∂P= ∂ˇ
∂S= ∂�
∂S= 0,
∂�
∂P= 1.
Therefore
�1 =A+
(∂ˇ
∂P
∂�
∂S− ∂ˇ
∂S
∂�
∂P+ ∂�
∂S
)
A∂�
∂S+ B
∂�
∂P
+B+
(∂˛
∂S
∂�
∂P− ∂˛
∂P
∂�
∂S+ ∂�
∂P
)
A∂�
∂S+ B
∂�
∂P
= B+(1 − Wf )B
= (1 − Wf )�0�0
�1�1
�1 + KS(1 + PSET /KP)�0 + KS(1 + (1 − Wf )PSET /KP)
;
�2 = �1 exp
(∫ T
0
[∂A
∂S(�(t), �(t)) + ∂B
∂P(�(t), �(t))
]dt
)
= �1 exp
(∫ T
0
�maxKSP(1 + P/KP)
�(S + KS(1 + P/KP))2+ �maxS(KS + S)
(S + KS(1 + P/KP))2dt
)
= �1 exp
(∫ T
0
�maxPdt
�(S + KS(1 + P/KP))−
∫ T
0
�maxSPdt
�(S + KS(1 + P/KP))2
+∫ T
0
�maxSdt
S + KS(1 + P/KP)−
∫ T
0
�maxKSSPdt
KP(S + KS(1 + P/KP))2 )
= �1 exp
(∫ �1
�0
1S
dS +∫ �0
�1
1S + KS(1 + P/KP)
dS
+∫ �1
�0
1P
dP +∫ �0
�1
KS
KP(S + KS(1 + P/KP))dP
)
= �1�1�1
�0�0exp
(∫ �0
�1
dS
S + KS(1 + P/KP)
)
× exp
(∫ �0
�1
KS/KPdP
S + KS(1 + P/KP)
)
≤ �1�1�1
�0�0exp
(∫ �0
�1
dS
S + KS(1 + (1 − Wf )PSET /KP)
)
= (1 − Wf )�1 + KS(1 + PSET /KP)
�1 + KS(1 + (1 − Wf )PSET /KP)< 1.
n the other hand, there is �2 > 0. Therefore, according to Lemma.1 it can be concluded that the positive period-1 solution is
104 (2011) 77–86 85
orbitally asymptotically stable and enjoying the property of asymp-totic phase. �
Proof of Theorem 5. Let � (Wf, PSET, SF) = T(Wf, PSET, SF)/Wf. Takethe first partial derivative of � (Wf, PSET, SF) with respect to Wf, thereis
∂� (Wf , PSET , SF )∂Wf
=Wf
∂T∂Wf
− T
W2f
.
Denote
˚(Wf , PSET , SF ) = Wf∂T
∂Wf− T.
Then there is ˚(0, PSET, SF) = 0. Since
∂˚(Wf , PSET , SF )∂Wf
= Wf
�maxSF
[KS + SF
(1 − Wf )2− (KP − �SF )KSP2
SET
KP�2(SF + (1 − Wf )PSET /�)2
],
it can be easily shown that ∂ ˚(Wf, PSET, SF)/∂Wf ≥ 0 for PSET <M(SF ). Then ˚(Wf, PSET, SF) ≥ ˚(0, PSET, SF) = 0, which implies that∂ � /∂Wf ≥ 0 or ∂ PRODout/∂Wf ≤ 0. Hence, the objective functionachieves its maximum when Wf → 0. Furthermore, there is
limWf →0
PRODout(Wf , PSET , SF )= �maxKPPSET (�SF + PSET )�KPSF + �KSPSET + KP(�KS + PSET )
. �
References
Akerberg, C., Hofvendahl, K., Zachi, G., 1998. Modelling the influence of pH, tem-perature, glucose and lactic acid concentration on the kinetics of lactic acidproduction by Lactococcus lactic ssp. Lactic ATCC in whole-wheat flour. Appl.Microbiol. Biotechnol. 49, 682–690.
Bainov, D., Simeonov, P., 1993. Impulsive differential equations: periodic solutionsand applications. Pitman Monographs and Surveys in Pure and Applied Mathe-matics.
Bona, R., Moser, A., 1997. Modeling of l-glutamic acid production with Corynebac-terium glutamicum under biotin limitation. Bioprocess Eng. 17, 139–142.
Chisti, Y., Miron, A.S., Pascual, V.G., Grima, E.M., Camacho, F.G., 2001. Carboxymethylcellulose protects algal cells against hydrodynamic stress. Enzyme Microb. Tech-nol. 29, 602–610.
Dutta, S.K., Mukherjee, A., Chakraborty, P., 1996. Effect of product inhibition on lacticacid fermentation: simulation and modelling. Appl. Microbiol. Biotechnol. 46,410–413.
Guo, H.J., Chen, L.S., 2009a. Periodic solution of a turbidostat system with impulsivestate feedback control. J. Math. Chem. 46, 1074–1086.
Guo, H.J., Chen, L.S., 2009b. Periodic solution of a chemostat model with Monodgrowth rate and impulsive state feedback control. J. Theory Biol. 260, 502–509.
Hartmann, C., Delgado, A., 2004. Numerical simulation of the mechanics of a yeastcell under high hydrostatic pressure. J. Biomech. 37 (7), 977–987.
Henzler, H.J., 2000. Particle stress in bioreactors. Adv. Biochem. Eng. 67, 35–82.Herrero, A.A., 1983. End-product inhibition in anaerobic fermentations. Trends
Biotechnol. 1, 49–53.Iyer, P.V., Lee, Y.Y., 1999. Product inhibition in simultaneous saccharifica-
tion and fermentation of cellulose into lactic acid. Biotechnol. Lett. 21,371–373.
Jiang, G.R., Lu, Q.S., Qian, L.N., 2007a. Chaos and its control in an impulsive differentialsystem. Chaos Soliton Fract. 34, 1135–1147.
Jiang, G.R., Lu, Q.S., Qian, L.N., 2007. Complex dynamics of a Holling type IIprey–predator system with state feedback control. Chaos Soliton Fract. 31,448–461.
Kasperski, A., 2008. Modelling of Cells Bioenergetics. Acta Biotheor. 56, 233–247.Kasperski, A., Miskiewicz, T., 2008. Optimization of pulsed feeding in a Baker’s yeast
process with dissolved oxygen concentration as a control parameter. Biochem.Eng. J. 40, 321–327.
Khan, N.S., Mishra, I.M., Singh, R.P., Prasad, B., 2005. Modeling the growth ofCorynebacterium glutamicum under product inhibition in l-glutamic acid fer-
mentation. Biochem. Eng. J. 25, 173–178.Lakshmikantham, V., Bainov, D., Simeonov, P.S., 1989. Theory of Impulsive Differen-tial Equations. World Scientific, Singapore.
Liu, X.N., Chen, L.S., 2003. Complex dynamics of Holling type II Lotka–Volterrapredator–prey system with impulsive perturbations on the predator. ChaosSoliton Fract. 16, 311–320.

8 stems
M
S
S
S
S
T
6 Y. Tian et al. / BioSy
eng, X.Z., Chen, L.S., 2008. Permanence and global stability in an impulsiveLotka–Volterra n-species competitive system with both discrete delays andcontinuous delays. Int. J. Biomath. 1, 179–196.
un, S.L., Chen, L.S., 2008. Permanence and complexity of the eco-epidemiologicalmodel with impulsive perturbation. Int. J. Biomath. 1, 121–132.
un, K.B., Tian, Y., Chen, L.S., Kasperski, A., 2010a. Nonlinear modelling of a synchro-nized chemostat with impulsive state feedback control. Math. Comput. Modell.52, 227–240.
un, K.B., Kasperski, A., Tian, Y., Chen, L.S., 2010b. New approach to the nonlinearanalysis of a chemostat with impulsive state feedback control. Int. J. Chem. Reac.
Eng. 8, Article A99.uresh, S., Khan, N.S., Srivastava, V.C., Mishra, I.M., 2009. Kinetic modeling andsensitivity analysis of kinetic parameters for l-glutamic acid production usingCorynebacterium glutamicum. Int. J. Chem. React. Eng. 7, Article A89.
ang, S.Y., Chen, L.S., 2002. Density-dependent birth rate, birth pulses and theirpopulation dynamic consequences. J. Math. Biol. 44, 185–199.
104 (2011) 77–86
Tang, S.Y., Chen, L.S., 2004a. The effect of seasonal harvesting on stagestructuredpopulation models. J. Math. Biol. 48, 357–374.
Tang, S.Y., Chen, L.S., 2004b. Modelling and analysis of integrated pest managementstrategy. Discrete Contin. Dyn. Syst. Ser. B 4, 759–768.
Tian, Y., Chen, L.S., Kasperski, A., 2010a. Modelling and simulation of a continu-ous process with feedback control and pulse feeding. Comput. Chem. Eng. 34,976–984.
Tian, Y., Sun, K.B., Chen, L.S., Kasperski, A., 2010b. Studies on the dynamics of acontinuous bioprocess with impulsive state feedback control. Chem. Eng. J. 157,558–567.
Toma, M.K., Rukilisha, M.P., Vanags, J.J., Zeltina, M.O., Leite, M.P., Galinina, N.I., Vies-turs, U.E., Tengerdy, R.P., 2000. Inhibition of microbial growth and metabolismby excess turbulence. Biotechnol. Bioeng. 38, 552–556.
Zeng, G.Z., Chen, L.S., Sun, L.H., 2006. Existence of periodic solution of orderone of planar impulsive autonomous system. J. Comput. Appl. Math. 186,466–481.