Embed Size (px)
Citation preview

Theoretical and Experimental Vibration Analysis
of an Oblique Space Frame
Paper relates analytical and experimental techniques for analysis of indeterminate spatial frames under dynamic loading
by M. A. Dokainish, J. N. Siddall, R. S. Raghava and S. K. Tiwari
ABSTRACT--This paper has the general objectives of re- lating analytical and experimental techniques for analysis of indeterminate spatial frames under dynamic loading. The model used has been made as general as possible to explore validity for nonstereotyped configurations. A highly redundant oblique four-bar space frame was se- lected having a lowest natural frequency of 42.1 cps.
Recent success of the finite-element-matrix method and progress in the field of nonlinear optimization provides a rational basis for the synthesis of space frames; however, the validity of the discretization, both for strength-stiff- ness analysis and dynamic analysis, has not been ex- plored for this type of configuration.
The flexibility influence coefficients, t h e natural fre- quencies and the steady-state vibration amplitudes were experimentally determined and compared with theoreti- cal values. Influence coefficients had an "error" of between four and 10 percent; the six lowest natural fre- quencies were in agreement within 15 percent when rotary inertia was considered. Steady-state amplitudes were in good agreement at frequencies not too close to reso- nance.
List of Symbols X = angular-displacement vector
[B ] = {d} =
3 = {F} = [ H I =
L L = [MI =
" P i =
l q l = Q(t) =
{ u l =
[ v ] =
coordinate-transformation matrix displacement matrix displacement vector structural-joint-forces matrix equilibrium matrix element-stiffness coefficient assembly-stiffness coefficient distance between mirror and grid mass matrix element-boundary force generalized displacement matrix excitation functions position vector free-vibration-amplitude matrix steady-state-amplitude matrix
M. A. Dokainish and dr. N. Siddall are Associate Professors and R. S. Raghava is Graduate Student, Mechanical Engineering Department, McMaster University, Hamilton, Ontario, Canada. S. K . Tiwari is associated with University of Bilaspur, Bilaspur, M. P., India. Paper was presented at 1969 S E S A Fall Meeting held in Houston, Tex., on October 14-17.
a = angle between telescope and normal to mirror [~] = displacement-transformation matrix
~ = element-boundary displacement e = error in reading angular displacement
= steady-state generalized coordinate o: = frequency
Introduction Thi s paper has the genera l ob jec t ive of es tab l i sh ing ana ly t i c a l t e chn iques for ana lys i s of i n d e t e r m i n a t e spa t ia l f rames u n d e r d y n a m i c loading.
T h e r ecen t success of the f in i t e -e lement t e c h n i q u e has suggested i ts use in d e t e r m i n i n g the inf luence coefficients for the s t ruc tu re . These are used to- gether wi th the l u m p e d - m a s s charac ter i s t ics to pred ic t d y n a m i c b e h a v i o r . T h e f lexibi l i ty- in- f luence coefficients, the n a t u r a l f requencies , a n d the s t eady - s t a t e v i b r a t i o n a m p l i t u d e s were ex- p e r i m e n t a l l y d e t e r m i n e d a n d c o m p a r e d wi th the- oret ical values, in order to explore the v a l i d i t y of the d iscre t iza t ion for this n o n s t e r e o t y p e d con- f igura t ion of s t ruc ture .
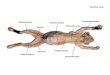
The Physical Model A simple b u t h igh ly r e d u n d a n t space f r ame was
selected in the fo rm of an ob l ique fou r -ba r f r ame w i t h o u t s y m m e t r y a n d wi th fixed m e m b e r ends, i l lus- t r a t e d in Fig. 1. T h e ob l i qu i t y of the ba r s assured a s y m m e t r y of s ta t ic a n d d y n a m i c response. T h e four a l u m i n u m - a l l o y ba r s are welded a t the base to a p la te and, a t the top, the ends are b r o u g h t close toge the r a n d welded to a second plate. D i m e n - sions are g iven in Fig. 2. I t is ex t r eme ly i m p o r t a n t for the accuracy of the resu l t s t h a t deflect ion of the bars a t the ends fixed to the base p la te are smal l as compared to the re la t ive d i sp l acemen t be tween po in t s or the s t r u c t u r e due to appl ied load. T o ensure this, the base p la te is c l amped a t each leg be tween 1 .25- in . - th ick steel p la tes t h a t are a t - t ached to s ix - inch-square steel bars c l amped to the floor.
Experimental Mechanics I 353

The Mathematical Model The analytical procedure uses two mathematical
models- -s ta t ic and dynamic. The latter is usu- ally an extension of the static model. The ac- curacy of analytical dynamic response depends on the number of nodes selected for formulation of the mass matrix. The amount of experimental work involved in determination of the influence coeffi- cients, however, increases in proportion to the number of nodes. As a compromise, each member was discretized into three equal lengths.
For the static model, the top plate was treated as rigid due to its relatively small size and com- parat ively large thickness. I t was idealized into four rigid bars, each joining the center of the top plate to the point of intersection of a member axis with the plate. The combination of the rigid element and the corresponding flexible-member element was treated as an integral finite element, and the element proper ty was formulated as such.
The static mathematical model thus consisted of twelve discrete elements. The arrangement of the elements in the physical model is shown in Fig. 2.
In defining the lumped mass model, the top plate mass was lumped at its center and four cor- ners. The mass of each span was lumped at its ends, and rigid-body inertia effects were included. Thus, the mass of the whole structure was lumped at 13 discrete points, referred to as nodes or sta- tions. The various node positions are shown in Fig. 2.
Theoretical Static Analysis Static analysis of structures by the finite-element
method is well established. 1-~ The analysis was subject to the usual limitations of small displace- ments and linearity of stress-strain and force-dis- placement relationships. The weight of the struc- rural elements was neglected as being small com- pared to their load capacity. In evaluating the element characteristic matrix, the deflection due to shear was neglected.
The displacement method was adopted as it is simple and straightforward to program.
The basic assumptions used in this method are:
(1) Boundary displacements of adjacent elements are mutual ly compatible,
(2) Stresses in the elements due to the boundary displacements are equilibrated by a set of forces at the element boundary in the direc- tion of the displacements, and
(3) Element forces are related to the correspond- ing element displacements by an element stiffness matrix expressed by the matrix equation.
{P,} = [k,] {5,} (1)
where
{P~} = the element boundary forces vector
[k~] = the element stiffness matrix
Fig. 1--Overall picture of setup
{5~} = the element boundary displacement vec- tor
i = element number
When elements are connected together to form a structure, eqs (1) can be combined into a single relationship:
{F} = [K]{u} (2)
where
{ F} = the structural-joint forces vector
[K] = the structural-assembly stiffness matrix
and
{u} = the structural-joint displacement vector.
Element boundaries have the same displacements as the structural joints to which they are connected, if both are referred to a common coordinate system. This can be expressed by
{5} = [/31{u} (3) where [/3] is the displacement-transformation ma- trix. I t consists of zero and one as elements. I f the displacements are referred to different coordi- nate systems, the relation (3) still holds but ele- ments of matrix [/3] contain elements of the co- ordinate-transformation matrix. The work done in loading the structure by the applied loads {F} must be equal to the internal energy. Using this leads to the relation
[K] = [/3 ]r [k ] [/3 ] (4)
[/3] is a sparsely populated matrix. The matrix product indicated by eq (4), therefore, can be a
354 I September 1970

T
I etc.
B J
% welded e n d e ' ~ l V
'~
1.05" dio. x 0.113" wall aluminum tubing
'~ 31.55" ~, 4-5 0 ~ ----
X vertical distance between top and bottom plates = 48 inches
... node points ( ~ etc . . . . discrete X Y Z ... system coordinate outer dia. of elements inner dia. of elements
modulus of elasticity modulus of r igidi ty
T 15.5"
4.50"
\ top plate '/~" thick
elements axes
... 1.05"
. . . 0 - 8 2 4 "
... 1 0 , : 5 0 0 , 0 0 0 Ibs/ in z
... 3 , 8 5 0 , O 0 0 1 b s / i n z
Fig. 2--Dimensions of structure and nodal points
very time-consuming step particularly for large structures. However, the structural-stiffness ma- trix [K] can be generated directly by assembling the element-stiffness matrices already transformed into the structural coordinate system. This method has come to be known as the d i r e c t - s t i f f n e s s me thod . 4. 5
The assumption of rigidity of the plate and the selection of the displacement method precluded the choice of more than one node on the top plate. I f more than one node is selected, the flexibility matr ix will have dependent displacement rows. Hence, its inverse, the stiffness matrix, does not exist. ~ Imposit ion of a one-node condition dic- ta ted the use of integral elements made up of flexible and rigid components. The combination shown in Fig. 2 was achieved by the transforma- tion of the stiffness matrix of the flexible component BC by the equilibrium matrix of the rigid com- ponent CD according to the expressions given below.~, 7
[K. ]~D = [K~, ]8c
[K~s]~D = [K~i]~e [H~ ]r (5) [ K i j ] ~ . . . . ]~' = [H~o ] [K j j ]~ [H~.
where
B D = the composite element
[Hc~] = the equilibrium matrix of C D
Ki ,K~s etc. = 6 X 6 submatrices of the four top element stiffnesses in system co- ordinates.
Experimental Static Analysis Both static and dynamic analysis may re-
quire the stiffness or the flexibility matrix of the entire structure, depending upon the approach selected for subsequent analysis. Experimental compilation of the stiffness matrix would require measurement of forces or moments at all the coordinates, for a given displacement at one of them, while the displacements at all the rest are of zero magnitude. I t is obvious tha t direct measure- ment of the stiffness coefficients would be extremely inconvenient. Hence, the only al ternative is the determination of the flexibility coefficients.
The loading technique was to t ransmit sufficient force at a node to cause displacements of con- venient magnitude without appreciably stiffening the structure. The requirement was fulfilled by two parts of a split collar, held together by counter- sunk screws, clamped on to the member over a a/4-in, length, at the point of load application. A small gap between the split parts ensured a friction grip between the member and the collar which had an outer spherical diameter of 2 in. A split spherical shell having 2-in. inner and 3-in. outer spherical diameters, was locked on to the collar so that its axis was in any position within 30 deg of the member axis. I t carried two pins screwed at diametrically opposite locations on the outer sur- face. Load was applied to the pins by the ends of a fine steel wire which supported a pulley in a verti- cal plane. A load supported by the pulley yields identical tensions equal to half the applied load, in each section of the steel wire leaving the pulley vertically. These tensile forces were t ransmi t ted through an intermediate system of pulleys, sup- ported by an independent tubular framework, to the pins in the same or opposite sense according as a force or a moment was being applied. Theoreti- cally, the arrangement ensured tha t the two equal tensions would give rise, at the node, to a resul tant force or a pure moment passing through the in- accessible member axis. The cross hairs of a levelling inst rument were used as a reference to align the sections of the steel wire in the required horizontal or vertical directions.
The load application to the pulley was achieved by means of a pneumatic cylinder working off 100- psi air, through a spring balance calibrated at 0.2 lb per division up to 100 lb. Alternatively, the load could be applied directly by steel weights sup- ported on a pan held by the pulley.
The objective of the measurement of displace- ment was to isolate the required component , angu- lar or linear, for measurement while suppressing all the other components. The points at which displacements were desired were inaccessible. The situation is represented in Fig. 3. The fixed point 0 is lying on a member axis when the s t ructure is unloaded. An orthogonal r ight-handed coordinate system i j k parallel to the structural coordinate system is established with origin at 0G at a point
Exper imenta l Mechanics [ 355

on the member axis coinciding with 0 before dis- placement . Linear and angular displacements of G are defined respect ively by vectors L and ~i with subscripts indicating their components along cor- responding coordinate direction. The components are posit ive along posit ive coordinates. As point G is inaccessible, measuremen t s are to be made a t P fixed with respect to i jk . G H is a rigid link.
A plane A B C D always passing through H can be oriented perpendicular to the desired coordinate axis. H coincides with P before displacement. T h e displacement of H f rom P to Q is given by a where
d = L -F A >< R (6)
where/ t (R~, Rj, Rk) is the position vector of P and ~, is small.
In t e rms of scalar components
di = L i + A ~ ' R k - A k ' R j
dj = L j -F A ~ ' R i - A i ' R k (7) d~ = L~ + A ~ ' R j -- A j ' R t
Suppose Li is to be measured. The surface A B C D is oriented perpendicular ly to the i axis a t P and locked to H. A B C D has a rigid body mot ion with GH, bu t it can be considered first to move parallel to itseff f rom P to Q with d isplacement and then a t Q take the required or ientat ion A. T h e displacement- t ransducer axis is fixed and passes through P along the i axis. The moving element of the t ransducer derives its displacement f rom each phase of m o v e m e n t of the surface ABCD, referred to above. The recorded displacement d~i can therefore be expressed as the sum
d~ = d~ § A k . d j - Ar P H A S E I P H A S E I I
= Ll + A ~ ' R k - A k ' R j + (8) A k ( L j + A k ' R i - A~ 'Rk ) §
A j ( L k + A I ' R j - A j . R ~ )
I t is noted t ha t displacements due to phase I I are of higher order and can be neglected, generally
d~ = L i -F A j ' R k - A k ' R j (9)
I t is obvious f rom eq (9) tha t , if the t ransducer axis coincides with the i axis, Rj and R~ will be zero, and thus the effects of all the other components a r e suppressed.
This m a y not a lways be possible. Care was t aken to main ta in the ins t rument ei ther in the i j plane or the ik plane so tha t only one error t e rm
! P
S Ib,
. .N , s ~
A,r . . . . . . . . . . . |
pH | e | |
' - - - - - - - - - - J C
~R k
oijk .... right handed coordinate system, fixed in space
GH .... rigid link fixed to the node point and equal to
ABCDH .... riot surface, can be locked to GH Ri ,Rj ,Rk .... components of position vector
of H W.R.T. G P .... a point fixed in space, coincident
with H before it's displacement N N .... axis parallel to i axis
Fig. 3--Resolution of linear displacements
Fig. 4--Device to eliminate rotation error in linear-displacement measurements
356,~ l ~Septernber 1970

is effective. Further , if surface A B C D is not exactly perpendicular to the i axis, phase I will contr ibute two more error terms, +Ako.dj and -Ajo'dk, where Aio and A~o are the components in
initial angular displacement of the perpendicular to A B C D from i.
By cyclic permutat ion of the indices, the ex- pressions for the other two coordinate directions can be obtained. The problem of resolution of angular displacements will be discussed along with the method of angular measurement.
To achieve the requirements for linear measure- ments, as discussed above, two clamps were de- signed as shown in Fig. 4. The inner clamp grips the member along a 1/2-in. length while providing an outer spherical surface having a 2-in. diameter over which the outer clamp can be fixed in any position. The outer clamp carries a ball-and- socket joint which, in turn, carries an optically flat first-surface mirror, off which the linear displace- ments were measured. The mirror thus corre- sponds to plane ABCD. The ball-and-socket joint permit ted the mirror surface to be aligned perpendicular to the required coordinate, while the outer clamp allowed the transducer axis to coincide with the coordinate axis along which measurements were desired. The mirror was aligned perpen- dicular to the coordinate axis by ensuring simul- taneously tha t
(1) Reference lines on the base of the structure and parallel to the coordinate axis were in line with their image in the mirror, and
(2) A vertical plumb line was parallel to its own image in the mirror.
The mirror provided an optically flat surface and was used to align the transducer axis with its image, thus put t ing the transducer perpendicular to the mirror and parallel to the desired coordinate axis.
A capaci tance-type proximity transducer coupled through an oscillator and reactance convertor to a cathode-ray oscilloscope was adopted as the linear measuring device. The transducer consists of a fixed electrode. Any flat conducting surface par- allel to the fixed electrode can act as the moving electrode. Normally, the moving electrode is fastened to the component whose displacement is to be measured. I n the present application, the
Fig. 5--Detai l of device to eliminate rotation error in l inear-displacement measurements
structure had both linear as well as angular dis- placements, whereas the proximity transducer is designed to work when electrodes remain parallel while moving towards or away from each other. When angular displacements are present, too-high results are registered.
To eliminate this defect, the moving electrode was mounted on the transducer itself. The spindle of the moving electrode was supported jointly by two 21/2-in. • l/2-in. • 5/1000-in.-thick stainless- steel strips, parallel to each other, which forced the electrode surfaces to remain parallel during relative motion. This is illustrated in Figs. 4 and 5. The spindle on the moving electrode was kept in posi- tive contact with the mirror during displacement by the steel strips, which exerted a force on the s tructure of the order of 0.02 lb or less as against 0.2 to 0.4 lb exerted by an average dial indicator with a least count of 0.0001 in. The errors intro- duced due to friction were thus minimized.
The transducer can be calibrated by the integral micrometer producing a deflection on the oscillo- scope of the same order as tha t obtained due to the load. The least count of the micrometer was 0.01 mm which could be further subdivided by the oscilloscope. A initial gap of 0.5 to 1.5 mm be- tween the electrodes was used.
The resolution of angular displacement into its components was achieved by a simple optical de- vice. As the magnitude of rotations involved was small, vectorial resolution was possible. The optically flat first-surface mirror used for linear measurements was also used to view the image of an illuminated t ransparent grid of 1/40-in. squares through a levelling telescope equipped with optical axis and base spirit levels together with vertical and horizontal cross hairs. The grid and the telescope were so placed tha t the line of sight was within 5 deg of the perpendicular to the mirror at the point of incidence.
The cross hairs were made to coincide with a pair of lines at right angles to each other on the grid. Rota t ion of the mirror due to loading of the struc- ture had three componen t s - -one about an ax is perpendicular to the mirror and two about axes in its plane. The first had no effect on the grid image as viewed through the telescope. The other two caused a displacement of the grid image with re- spect to the cross hairs. The vertical and hori- zontal displacement of the grid was directly pro- portional to twice the rota t ion of the mirror about the horizontal and vertical axes, respectively.
Thus, viewing the mirror along the i axis pro- vided rotations along j and k axes and tha t along j axis those about i and k axes. Readings with these two settings provided all the three rotations, and values about k provided a check.
An additional optically flat first-surface mirror, mounted close to the objective of the telescope, was used to view the grid reflected by both the mirrors, thereby increasing the optical arm. The tele- scope was further equipped with a lateral displace-
Experimental Mechanics I 357

ment- type optical vernier, with a least count of 0.001 in. which could be used to further subdivide the 1/40-in. grid. The setup could accurately pro- vide measurements with a least count of 0.1 • 10-4 radians up to a distance of 200 in. between the grid and the telescope along the line of sight.
The linear displacement of the mirror which shifted the point of incidence along the line of sight affected the readings as represented in Fig. 6, which is self explanatory. The error e in the reading re- corded for rotat ion of the mirror about an axis in its own plane but perpendicular to the plane con- taining the line of sight is given by
e ~ • sin a (10)
ignoring the change in the included angle a due to mirror rotation. We can determine d~ from eq (9). The correct reading without the linear dis- placement of the mirror is
dk = 2 L L . A k (11)
Therefore the percentage error ~ • sin a / 2 L L . A s • 100 where L L is the distance between the mirror and the grid. In the worst case d~ and L L . A s are of the same order. Hence, the per- centage error is determined by 100 sin a approxi- mately.
I t is thus obvious that , by increasing the distance between the mirror and grid and decreasing the angle between the line of sight and the perpendicular to the mirror, the percentage error can be de- creased. In the event tha t errors are still large, the reading can be repeated after shifting the mirror, mounted on the telescope, through 90 deg.
Theoretical Dynamic Analysis The analysis was restricted to motions of small
amplitudes. The elastic and inertial properties of each element were determined separately. La- grange's equations were writ ten for each com- ponent. As related to each separate component, Lagrange 's equations consti tute a set of inde- pendent equations of motion. However, when the components are a t tached to each other to form a structural system, it is necessary tha t the displace- ments of connected components be compatible at their point of connection. This compatibili ty requirement gives rise to a set of constraint equa- tions which serve to relate the coordinate system. Through the use of these equations of constraints, a set of system-generalized coordinates is determined having a number equal to the total number of component coordinates minus the number of con- straint equations.
The objective of this part of the analysis is to formulate and solve a system of equations of mo- tion, the solution of which yields the dynamic re- sponse of the system. Writ ten in matrix form and using the generalized coordinates, these equations appear as follows for an undamped structural sys- tem:
where:
{ q } =
[ M ] =
[K] =
{Qtt)} =
[M]{~} 3-[K]{q} = IQ(t)} (12)
a column matrix of generalized dis- placements
a column matrix of generalized ac- celerations
a square symmetric matrix of gener- alized masses
a square symmetric matrix of gener- alized st•
a column matrix of t ime-dependent
di J
I
= ~ . - i
o
Fig. 6 - -Er ror in angu la r m e a s u r e m e n t
T M Mi M2 M3
di
telescope C~ etc. crosshair intersection on grid mirror corresponding to M, etc. initial position C~C 2 recorded linear grid displacement displaced position CzCs error due to the lineor displaced angular position displacement of the mirror without linear displacement C, C3 correct displacement lJn~or mirror displacement along iaxis, equals L~
358 I September 1970

generalized forces.
The analysis may be classified into two cate- gories as follows:
(1) Response of the structure to free vibrations (2) Response of the undamped structure to
s teady-state sinusoidal excitation.
Free Undamped Vibrations
For undamped free vibrations, eq (12) reduces to:
[M]{~} + [gl{q} = 0 (13)
These equations are derived from similar equa- tions formulated for each one of the components separately.
Equat ion (13) can also be written as:
{q} = - - [ M I - ' [ K ] { q } (14)
Assuming a solution of the form
{q} = {u} sin ~t (15) and substituting eq (15) into eq (13) we get
co2[M]'{U} - [K]{U} = 0 (16)
This is an eigenvalue problem. The solution co2 is obtained by the Jacobi rotation method, s This method diagonalizes the symmetr ic positive defi- nite matrix by applying successive rotations.
Steady-state Analysis Equat ion (12) is for an undamped structural
system under s teady-state excitation. In analyz- ing the system, the classical normal mode approach will be adopted and it will be referred to as modal analysis. I t should be observed tha t the excitation functions Q(t) are arbi t rary functions of time. Using the linear t ransformation
{q} = [LI- ' [V]{7} (17)
where the square matrix [L] is defined by [M] = [L]r[L] and IV] is a modal matrix, eq (12) can be rewrit ten as follows:
1 {~} + {7} = IN} (18) co 2 r
where
co, = the r ch natural frequency of the structure
17} = column matrix consisting of a set of time- dependent normal coordinates
{ N} = generalized forcing vector.
Equat ion (18) represents a set of uncoupled differ- ential equations of the type
1 co2~ ~,(t) + 7,(t) = N,(t) , r = 1 , 2 . . . n (19)
Equat ions (19) have precisely the form of the differential equation describing the motion of an undamped single-degree-of-freedom system. Hence, modal analysis uncouples the equations of motion by means of a linear transformation; the t ransformation matrix is just the modal matrix.
Assuming sinusoidal excitation,
N ( t ) = N sin cot
each equation is solved in 7 coordinates and then displacements are transformed to q coordinates by eq (17).
The s teady-state solution of eq (18) in original coordinates is
[L ]-~[V]I N} sin cot (20) l q } = [ 1 - (co/co,)~]
where co is frequency of excitation.
Fig. 7 - -De ta i l of ho r i zon ta l exc i ta t i on
Fig. 8 - -Deta i l of ver t ica l exc i ta t ion
Experimental Mechanics I 359

6 0
50
4 0
50 D
O" O ~ 2 0
I 0
linear influence coefficients range O.IxlO "5- 0-4xlO -2
- 3 0 - 2 0 - I 0 0 I0 20 30 4 0 Percentage Error
Fig. 9---Error histogram for linear-influence coefficients
Experimental Dynamic Analysis Concurren t wi th the theore t ica l analysis, the
sys tem behavior was also inves t iga ted experi- menta l ly . For de termining i ts na tu ra l frequencies, the s t ruc ture was excited by a sinusoidal force in three or thogonal x, y and z directions. A 30-1b e lec t romagnet ic v ib ra t ion exciter was used as the force generator , using a soft m~unting. Fo r ex- ci t ing in the x and y directions, the shaker was sup- po r t ed on a square a luminum pla te which, in turn, was suspended by nylon s tr ings from the pipe supers t ructure , shown in Fig. 7. For the z direc- t ion, the shaker was moun ted on a t r ipod which carr ied an inflated inner tube, Fig. 8.
T h i r t y two s t ra in gages were mounted on the four legs near each node point . All the s t ra in gages were connected to a switch and balance uni t and ca thode - r ay oscilloscope. The shaker was powered th rough a power amplifier which in tu rn was connected to an R.C. generator. An ammete r was connected in series wi th the shaker to keep the cur ren t constant , ensuring cons tan t ampl i t ude of the excit ing force.
The same capac i t ance - type p rox imi ty t ransducer was used as for s ta t ic measurements . A piezo- electr ic force gage was employed to measure the exci ta t ion ampl i tude . The force gage was moun ted be tween the shaker and a steel rod bol ted to the s t ructure , shown in Fig. 8. The cal ibra t ion of the measur ing sys tem was accomplished by app ly ing known s ta t ic loads. The o u t p u t was d isp layed on the screen of the ca thode - ray oscilloscope.
Ampl i tudes of v ib ra t ion were recorded corre- sponding to two values of exci tat ion. A force of 15.8-1b ampl i tude was appl ied for observa t ions away from the resonance. Near- resonance ob- servat ions were t aken b y app ly ing an exci ta t ion force of 3.32-1b ampl i tude . The force was kep t cons tan t by keeping the ammete r cur rent to the re-
n 50 H angular influence
] L coefficients 40 .I x IO-S--0.99 xlO "4
30
ZO
I0
0 g r ~ r u , I ,url. , n -40 -30 -20 -I0 0 I0 20 30 40
Percentage Error
Fig. lO--Error histogram for angular-influence coefficients
quired value, while changing the frequency. Ampl i tudes of v ib ra t ion were recorded a t different s tat ions, in different direct ions and under vary ing direct ions of excitat ions. The t ransducer was or iented along the sys tem axes and the observat ions were recorded. I t was possible to measure l inear d isplacement only. The effect of ro ta t ions in the measurement of l inear d isplacements could not be accounted for. Linear d isplacements were mea- sured in the coordina te direct ions where magni tude of ro ta t ions was compara t ive ly small.
Results and Conclusions The influence coefficients are classified into l inear
and angular measurements . There are nine nodes and six degrees of freedom for each node, requiring 1455 measured coefficients. The resul ts have been presented in the form of his tograms, Figs. 9 and 10.
No a t t e m p t s were made to measure the coeffi- cients if the theore t ica l influence coefficients were below the absolute value of 0.25 X 10 -~ for angular ones and 0.5 X 10 -5 for the l inear ones.
Al though some of the results are higher, in general the exper imenta l values are lower t han the theoret i- cal ones. The largest single reason is apparen t ly the error in load appl icat ion. Fo r larger values, the sca t te r in the readings is small. The scat ter in
TABLE I--FREQU ENCIES
Mode 1 2 3 4 5 6 7
Theoret ical Natural Frequen- cies, cps
Experi- menta l Natural Frequen- cies, cps
41.74 49.3 58.3 61.68 73.4 77.2 84.9
42.1 43.2 62.6 66.5 73.5 77.5 88.0
360 I September 1970

6 0 ~ . 4 0
4 0
c
% :<
i zo E E
node - I
excitation direction - Z measurement direction - Y Q = 1 5 . 8 Ib
s theoretical experimentcl
I I I I I I !
.J i i i [
3 0 4 0 O i i i
2 0 5 0 6 0 C y c l e s per s e c o n d
Fig. ll--Steady-state response--node I
,= 1 6 0
x
~= eo E
node - IX excitat ion d i r e c t i o n - Z measurement d i rect ion-Y
Q = 1 5 - 8 lb.
�9 theoretical A I
A experimental A I
A k
' JO r ' 5 '0 0 2 0 3 4 0 6 0 C y c l e s p e r s e c o n d
Fig. 12--Steady-state response--node IX
error for smaller values of influence coefficients would indicate tha t limits of ins t rumentat ion have been reached�9
The resultant error is dependent upon a number of other independent factors such as error in loca- t ion of the nodes, deviation of the inst rument axis from the coordinate direction, errors in taking observations and other personal errors. Hence, a more or less normal distribution for the resultant error would be expected. The tendency is brought out clearly by the histograms.
Considering the order of magnitudes of the dis- placements involved, it can be concluded tha t a reasonably accurate technique for measurement of the flexibility influence coefficients, both linear and angular, for a generalized space frame has been es- tablished.
A comparat ive s tudy of analytically calculated and experimentally measured natural frequencies is made in Table 1. I t can be seen tha t theoretical and experimental values of natural frequencies are in agreement.
Table 2 shows the values of the first six natural fre- quencies in ascending order, when rigid-body inertia was completely neglected and when it was included on only plate station. Comparing the values of Tables 1 and 2, it can be concluded that rigid-body inertia plays an important role. This is because the magnitude of angular influence coefficients was comparable to the linear ones.
The graphs shown in Figs. 11 and 12 are plotted
TABLE 2--FREQUENCIES
Neglecting Rigid Body Inertia on All Nodes, cps
Considering Rigid-body Inertia only on Plate Node, cps
76.0 89.0 91.0 119.0 120.0 131.0
58.3 64�9 85.0 89.5 102�9 110.8
to s tudy the s teady-state response of the structure. Each graph illustrates the theoretical and experi- mental response of the undamped and damped structure.
I t can be observed that , away from resonance, the theoretically calculated and experimentally mea- sured values of ampli tude are very close. But, at the resonance, no fixed pat tern is observed. At some points, experimental values are higher than the theoretical values. At other points, the experi- mental values are lower than the theoretical values�9 I t is interesting to note tha t in both graphs there is no peak corresponding to the second natural fre- quency. This is because the first and second nat- ural frequencies are very close and the system re- sponse overlaps considerably.
I t is concluded tha t the discrete lumping of masses gives satisfactory results. Due to the obliquity and asymmet ry of the structure, the rigid- body inertia played an impor tant role. Away from the resonance, experimental and theoretical values of the ampli tude of oscillation are in agreement.
Acknowledgments
The work of this paper was supported (in part) by the Defense Research Board of Canada, Grant number 9781-02.
R e f e r e n c e s
1. Zienkiewiez, O. C. and Cheung, Y . K . , The Finite-Element Method in Structural and Continuum Mechanics, McGraw-Hill, New York (1967).
2. Rubinstein, M . F., Matrix Computer Analysis of Structures, Prentice- Hall, Englewood Cliffs, N . J . (1966).
3. Przemeniecki, J . S. , Matrix Methods of Structural Analysis, McGraw- Hill , New York (1968).
4. Turner, M . J . , Clough, R. W., Martin, H . C. and Topp, L . J . , "Stiff- ness and Deflection Analysis of Complex Structures," gnl. Aero. Sci., 2 3 (9), 805-824 (September 1956).
5. Turner, M . J . Martin, H . C�9 and Wiekel, R. C., "Further Develop- ment and A15plications of the Stiffness Method," A G A R D Meeting, Paris, France (J~dy 1962).
6. Livesly, R. IC., Matrix Methods of Structural Analysis, Pergamon, New York (1964).
7. Tezcan, S. S., "'Computer Analysis of Plane and Space Structures,'" Jnl . Str. Div�9 Proc. A S C E , S tY , 143-173 (April 1966).
8. Young, J�9 W. and Christiansen, H . N . , "'Synthesis of Space Truss Based on Dynamic Criteria," Jnl. Str. Div., Proc. A S C E , St6, 425-441 (December 1966).
Experimental Mechanics I 361










![Theoretical and experimental study of the vibration ... · wenner.] TheVibrationGalvanometer. 349 lengthsandtensionofwhichmaybechangedsoastogivea considerablerangeinthenumberofvibrationspersecond.The](https://img.pdfslide.us/doc/110x75/5afb90ee7f8b9a19548f7e39/theoretical-and-experimental-study-of-the-vibration-thevibrationgalvanometer.jpg)
![Theoretical and Experimental Study on Vibration of … · in torsional vibration). ... equations and solving them numerically [1]. He ... codes are written in the MATLAB software](https://img.pdfslide.us/doc/110x75/5b86b1077f8b9a2e3f8d66e4/theoretical-and-experimental-study-on-vibration-of-in-torsional-vibration.jpg)