Embed Size (px)
Citation preview

The Engineering DynamicsCourse Companion,Part 2: Rigid BodiesKinematics and Kinetics


Synthesis Lectures onMechanical Engineering
Synthesis Lectures on Mechanical Engineering series publishes 60–150 page publicationspertaining to this diverse discipline of mechanical engineering. The series presents Lectureswritten for an audience of researchers, industry engineers, undergraduate and graduatestudents.Additional Synthesis series will be developed covering key areas within mechanicalengineering.
The Engineering Dynamics Course Companion, Part 2: Rigid Bodies: Kinematics andKineticsEdward Diehl2020
The Engineering Dynamics Course Companion, Part 1: Particles: Kinematics and KineticsEdward Diehl2020
Introduction to Deep Learning for Engineers: Using Python on Google Cloud PlatformTariq M. Arif2020
Towards Analytical Chaotic Evolutions in BrusselatorsAlbert C.J. Luo and Siyu Guo2020
Modeling and Simulation of Nanofluid Flow ProblemsSnehashi Chakraverty and Uddhaba Biswal2020
Modeling and Simulation of Mechatronic Systems using SimscapeShuvra Das2020
Automatic Flight Control SystemsMohammad Sadraey2020

ivBifurcation Dynamics of a Damped Parametric PendulumYu Guo and Albert C.J. Luo2019
Reliability-Based Mechanical Design, Volume 2: Component under Cyclic Load andDimension Design with Required ReliabilityXiaobin Le2019
Reliability-Based Mechanical Design, Volume 1: Component under Static LoadXiaobin Le2019
Solving Practical Engineering Mechanics Problems: Advanced KineticsSayavur I. Bakhtiyarov2019
Natural Corrosion InhibitorsShima Ghanavati Nasab, Mehdi Javaheran Yazd, Abolfazl Semnani, Homa Kahkesh, NavidRabiee, Mohammad Rabiee, and Mojtaba Bagherzadeh2019
Fractional Calculus with its Applications in Engineering and TechnologyYi Yang and Haiyan Henry Zhang2019
Essential Engineering Thermodynamics: A Student’s GuideYumin Zhang2018
Engineering DynamicsCho W.S. To2018
Solving Practical Engineering Problems in Engineering Mechanics: DynamicsSayavur Bakhtiyarov2018
Solving Practical Engineering Mechanics Problems: KinematicsSayavur I. Bakhtiyarov2018
C Programming and Numerical Analysis: An IntroductionSeiichi Nomura2018

vMathematical MagnetohydrodynamicsNikolas Xiros2018
Design Engineering JourneyRamana M. Pidaparti2018
Introduction to Kinematics and Dynamics of MachineryCho W. S. To2017
Microcontroller Education: Do it Yourself, Reinvent the Wheel, Code to LearnDimosthenis E. Bolanakis2017
Solving Practical Engineering Mechanics Problems: StaticsSayavur I. Bakhtiyarov2017
Unmanned Aircraft Design: A Review of FundamentalsMohammad Sadraey2017
Introduction to Refrigeration and Air Conditioning Systems: Theory and ApplicationsAllan Kirkpatrick2017
Resistance Spot Welding: Fundamentals and Applications for the Automotive IndustryMenachem Kimchi and David H. Phillips2017
MEMS Barometers Toward Vertical Position Detection: Background Theory, SystemPrototyping, and Measurement AnalysisDimosthenis E. Bolanakis2017
Engineering Finite Element AnalysisRamana M. Pidaparti2017

Copyright © 2021 by Morgan & Claypool
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted inany form or by anymeans—electronic, mechanical, photocopy, recording, or any other except for brief quotationsin printed reviews, without the prior permission of the publisher.
The Engineering Dynamics Course Companion, Part 2: Rigid Bodies: Kinematics and Kinetics
Edward Diehl
www.morganclaypool.com
ISBN: 9781681739328 paperbackISBN: 9781681739335 ebookISBN: 9781681739342 hardcover
DOI 10.2200/S01035ED1V01Y202007MEC030
A Publication in the Morgan & Claypool Publishers seriesSYNTHESIS LECTURES ONMECHANICAL ENGINEERING
Lecture #26Series ISSNPrint 2573-3168 Electronic 2573-3176
Newtdog and Wormy are registered trademarks of Edward James Diehl.

The Engineering DynamicsCourse Companion,Part 2: Rigid BodiesKinematics and Kinetics
Edward DiehlUniversity of Hartford
SYNTHESIS LECTURES ONMECHANICAL ENGINEERING #26
CM&
cLaypoolMorgan publishers&

ABSTRACTEngineering Dynamics Course Companion, Part 2: Rigid Bodies: Kinematics and Kinetics is a sup-plemental textbook intended to assist students, especially visual learners, in their approach toSophomore-level Engineering Dynamics. This text covers particle kinematics and kinetics andemphasizes Newtonian Mechanics “Problem Solving Skills” in an accessible and fun format,organized to coincide with the first half of a semester schedule many instructors choose, andsupplied with numerous example problems. While this book addresses Rigid Body Dynamics,a separate book (Part 1) is available that covers Particle Dynamics.
KEYWORDSdynamics, particle kinematics, particle kinetics, Newtonian mechanics

ix
ContentsAcknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
0 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.1 About the Book . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10.2 Newtdog and Wormy: Your Course Companions . . . . . . . . . . . . . . . . . . . . . . . 30.3 Bottom Line Up Front (B.L.U.F.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30.4 Kinematics vs. Kinetics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30.5 Course Breakdown . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40.6 Equation Sheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50.7 Textbooks and References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
13 Angular Kinematics of Rigid Body Motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1313.1 Introduction to Rigid Body Motion Kinematics . . . . . . . . . . . . . . . . . . . . . . . . 1313.2 Pure Translational Velocity or Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . 1513.3 Pure Rotational Velocity of Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1513.4 Velocity Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1613.5 Fundamental Angular Kinematic Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 1613.6 Angular Kinematics Special Cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1713.7 Important Ideas About Velocity of Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . 1713.8 Acceleration of Rigid Bodies in Pure Rotation . . . . . . . . . . . . . . . . . . . . . . . . . 19
14 Absolute and Relative Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3114.1 Relative Velocity on a Rigid Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3114.2 Applying the Rigid Body Motion Kinematics Velocity Diagram . . . . . . . . . . . 32
14.2.1 Choosing a Reference Point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3314.2.2 Solution Method Using Vector Math . . . . . . . . . . . . . . . . . . . . . . . . . 3314.2.3 Solution Method Using Vector Triangles . . . . . . . . . . . . . . . . . . . . . . 3514.2.4 Solution Method Using Vector Components of Velocity Diagram . . 37
14.3 Multiple Rigid Body Parts (Mechanisms) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

x
15 Velocity Analysis Using the Instantaneous Center of Rotation . . . . . . . . . . . . . 5115.1 Instantaneous Center of Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5115.2 Locating the Instantaneous Center of Rotation . . . . . . . . . . . . . . . . . . . . . . . . 5215.3 Using Geometry to Find the Instantaneous Center of Rotation . . . . . . . . . . . 54
16 Acceleration Analysis (Part 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6316.1 Relative Acceleration on a Rigid Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6316.2 Solution Method Using Vector Math . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6516.3 Acceleration Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6616.4 Using Vector Triangles for Acceleration Analysis . . . . . . . . . . . . . . . . . . . . . . . 68
17 Acceleration Analysis (Part 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8117.1 More Acceleration Analysis of Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . 8117.2 Polar Complex Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8617.3 Vector Loops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8917.4 Slider-Crank Velocity and Acceleration Analysis Using Vector Loops . . . . . . 9117.5 Four-Bar Linkage Velocity and Acceleration Analysis Using Vector Loops . . 93
18 Coriolis Acceleration Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10118.1 Coriolis Acceleration, Sliding Contact, and Rotating Frame Acceleration
Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
19 Mass Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11519.1 Center of Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11519.2 Mass Moment of Inertia (mMoI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11819.3 Parallel Axis Theorem (P.A.T.) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12019.4 Radius of Gyration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12219.5 mMoI by Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12219.6 mMoI from Parts Using a Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
20 Newton’s Second Law in Constrained Plane Motion . . . . . . . . . . . . . . . . . . . . 12920.1 N2L Applied to a Rigid Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12920.2 N2L of Rigid Bodies Constrained about a Fixed Point and the Effective
Inertial Moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13020.3 P.A.T. Revealed When Using Rigid Body N2L About a Fixed Point . . . . . . 131

xi
21 Newton’s Second Law in Translation and Rotation Plane Motion . . . . . . . . . 14321.1 N2L of a Rigid Body in Both Translation and Rotation . . . . . . . . . . . . . . . . 143
22 Energy Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15922.1 Work and Energy Applied to a Rigid Body . . . . . . . . . . . . . . . . . . . . . . . . . . 15922.2 Power in Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16222.3 P.A.T. Revealed When Taking Kinetic Energy about a Fixed Point . . . . . . . 163
23 Rigid Body Impulse-Momentum Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17723.1 Angular Momentum of Particles and Rigid Bodies . . . . . . . . . . . . . . . . . . . . 17723.2 Angular Impulse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17823.3 Angular Impulse-Momentum Applied to Rigid Bodies . . . . . . . . . . . . . . . . . 17923.4 Conservation of Angular Momentum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18023.5 P.A.T. Revealed When Applying Impulse-Momentum to a Fixed Rotating
Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
24 Impact of Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19124.1 Impact of Rigid Bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19124.2 Angular Momentum Applied to Ballistic Pendulums . . . . . . . . . . . . . . . . . . . 19224.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
B Rigid Body Dynamics Sample Exam Problems . . . . . . . . . . . . . . . . . . . . . . . . . 205B.1 Rigid Body Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
B.1.1 Rigid Body Angular Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205B.1.2 Rigid Body Velocity Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205B.1.3 Instantaneous Center of Rotation 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 206B.1.4 Instantaneous Center of Rotation 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 206B.1.5 Instantaneous Center of Rotation 3 . . . . . . . . . . . . . . . . . . . . . . . . . . 207B.1.6 Acceleration Analysis 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208B.1.7 Acceleration Analysis 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208B.1.8 Acceleration Analysis 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
B.2 Final Exam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.2.1 Mass Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.2.2 Rigid Body N2L 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.2.3 Rigid Body N2L 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.2.4 Rigid Body Work-Energy 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209B.2.5 Rigid Body Work-Energy 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211

xiiB.2.6 Rigid Body Impact 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212B.2.7 Rigid Body Impact 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213B.2.8 Rigid Body Impact 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
B.3 Answers to Sample Exam Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
Author’s Biography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217

xiii
AcknowledgmentsThis course companion is the result of a decade of teaching Dynamics in close cooperation withseveral brilliant and dedicated engineering educators. I would like to sincerely thank my col-leagues and mentors for their assistance and inspiration. Here I acknowledge their contributionto this effort and my career as an educator in reverse chronological order.
I’m grateful to my fellow faculty at the University of Hartford, many of whom reviewedthe manuscript and offered extremely valuable and insightful feedback and corrections. Theseinclude Dr. Cy Yavuzturk, Dr. Mark Orelup, Dr. Mary Arico, Dr. Taka Asaki, Professor PhilFaraci, and Dr. Chris Jasinski. I’m indebted to my Ph.D. advisor, friend, and mentor, Dr. JiongTang, for his support and encouragement to publish a work that mattered to me. I’m foreverthankful to my friends and colleagues at the United States Coast Guard Academy for support-ing me during and providing the opportunity to transition from a practicing engineer to aneducator. These include Dr. Todd Taylor, Captain Mike Corl, Dr. Elisha Garcia, Lieutenant(Ret) Sean Munnis, Commander Nick Parker, Dr. Tom DeNucci, Dr. Susan Swithenbank,Commander John Goshorn, and Lieutenant Commander J.J. Schock. The close working rela-tionship of these instructors in which we shared notes, examples, and exam problems heavilyinfluenced the content of this book, and many of the problems within are adaptations of thisgroup effort. I’d like to acknowledge Sean Munnis in particular as the person who dubbed SirIsaac Newton “Newtdog” and encouraged me more than anyone to draw him as a cartoon char-acter and develop this into a book. Before I joined academia, I was a working engineer and I’mgrateful for my former colleagues at Seaworthy Systems and General Dynamics, but especiallymy mentor, the late Bill McCarthy, who pushed me and inspired me to be a better engineer andbetter writer. Special thanks to the late Professor Don Paquette of the United States MerchantMarine Academy, my Statics, Dynamics, and Machine Design professor. He inspired me tobecome a teacher, and I’ve endeavored to follow in his footsteps.
And in real life, I’m so very thankful tomy incredibly supportive wife, Lori Dappert Diehl,who actually read this book. Thank you, Lori, for always making me laugh and never letting megive up. Lastly, I’d like to acknowledge my older brother, the late James Harold Diehl, whosecommunication limitations have obliged me to communicate and whose resilience inspires meto persevere through the relatively minor inconveniences of life.
Edward DiehlAugust 2020


1
C L A S S 0
IntroductionB.L.U.F. (Bottom Line Up Front)
• Dynamics is the study of motion.
• Kinematics and Kinetics:
– Kinematics: the description of motion, ignoring the cause of the motion.– Kinetics: the interaction of loading and motion on objects with mass.
• Categories of objects:
– Particles: objects treated as point masses since their size and shape isn’t im-portant.
– Rigid Bodies: objects whose size and shape m their rotation is important tohow they move.
• Course is broken down into four parts.
– Particle Kinematics, Particle Kinetics, Rigid Body Kinematics, Rigid BodyKinetics.
0.1 ABOUT THE BOOKThis is the second part of a two-part “course companion” to assist undergraduate engineeringstudents taking a first course in Dynamics. Part 1 deals with the dynamics of particles, whilePart 2 covers the dynamics of rigid bodies. Your course companions are “Newtdog and Wormy”(Figure 1) whowill guide you throughNewtonianDynamics with plenty of examples and imagesespecially geared towards visual learners. Much of the content from the introduction to Part 1is repeated in this introduction so Part 2 is equally useful on its own.
Many engineering majors typically take Dynamics in their Sophomore year after complet-ing Statics, and this is one of the most challenging transitions, requiring considerable personalgrowth in the way problems are approached and processed. This book is meant to help with thattransition and serve as a “course companion,” a complementary resource a struggling studentcan refer to when frustrated.

2 0. INTRODUCTION
Figure 1: Portrait of Sir Isaac Newton by Godfrey Kneller with your course companions: Newt-dog and Wormy (© E. Diehl).
Why is Dynamics so difficult? Many of the problem types require students to think differ-ently than they’re used to: rely less on step-by-step procedures and instead recognize the natureof a problem and navigate to a solution using concepts. Sometimes problems require workingbackward or applying logic to generate an “ah-ha” moment, when the lightbulb goes off and thepath to a solution becomes clear. Students often describe some Dynamics assignments as “trickproblems.” This is true in a way: the solution will seem obvious once revealed. A good problemsolver doesn’t need to have worked through an identical problem in order to solve a new problemthey’ve never seen. Instead, with problem solving experience, they develop a skill to pick it apart,identify the underlying principles, and formulate a path forward. Sometimes this is like a maze,where going down one path leads to a dead end. Problem solvers know to reverse course a bit,revaluate, and try a new approach. This text is intended to be your companion on that journeyto developing “ah-ha” skills.
Because this is a “course companion,” the book is written in a relatively casual tone com-pared tomost textbooks (note the frequency of the pronoun “we”) and includes Sir Isaac Newtonas a cartoon to add some levity to this often-dreaded course. The cartoons are intended to alsoserve as “visual mnemonics.” That is, they are meant to be memorable with an aspect of themassociated with particular concepts as they’re presented. Solving problems in dynamics requires

0.2. NEWTDOG AND WORMY: YOUR COURSE COMPANIONS 3recognizing the nature of a problem, identifying the key concepts, and applying a solution strat-egy. The middle part is where these cartoons can help, especially if one can think “oh, this is justlike when ____________.” The blank being an aspect of the cartoon.
The 2 parts of this course companion consist of 12 “classes,” each coinciding with thetypical 2-class-a-week schedule of a semester-long Dynamics course. A common complaint ofDynamics students is not having enough examples or that the available examples are much eas-ier than the homework. Therefore, the examples within each class are progressively longer andmore challenging. Some textbooks skip steps within the example solutions, so this course com-panion attempts to work through the solutions in exhaustive detail. Example exam questions arealso included in the appendices to provide opportunity for additional problem-solving practice.This course companion is also intended to assist instructors seeking inspiration for their ownexamples, homework problems and exam problems.
0.2 NEWTDOG AND WORMY: YOUR COURSECOMPANIONS
“Newtdog” is a silly nickname for Sir Isaac Newton intended to make him less intimidating.Based on quotes, his own writings, and biographies, Sir Isaac Newton seems to have been adown-to-Earth regular guy who was inquisitive and humble. He said: “If I have seen furtherthan others, it is by standing upon the shoulders of giants. “ and “To myself I am only a childplaying on the beach, while vast oceans of truth lie undiscovered before me.”
Newtdog is drawn to seem friendly, adventurous (just as Sir Isaac Newton was revolu-tionary), and a little bit of a dandy with his powered wig, frilly cuffs, long coat, and buckledshoes. Newtdog’s buddy is “Wormy” who lives in the iconic apple that apocryphally led Newtonto “discover gravity.” Wormy is often just along for the ride and a little nervous about Newtdog’senthusiasm and adventurous spirit.
0.3 BOTTOM LINE UP FRONT (B.L.U.F.)Every chapter begins with a “Bottom Line Up Front” (B.L.U.F.) consisting of bulleted itemsof the contents with very brief summaries and/or equations. The purpose is to introduce you tothe essentials of the topic(s) covered and serve as a quick reference for later use when flippingthrough the book to search for content. In a classroom environment the BLUF provided at thebeginning of class helps get the students prepared for what they’re about to learn. Students usingthis course companion should read the BLUF just before class (at a minimum) so you’re on thelookout for this information. The BLUF only takes a few seconds, so it’s easy.
0.4 KINEMATICS VS. KINETICSDynamics can be organized into two parts: Kinematics and Kinetics. It’s useful to memorize thedefinition of these terms to help organize the approaches we’ll take.

4 0. INTRODUCTIONKinematics is the description of motion without regards to why it’s happening and studies
the relationships among time, position, velocity, and acceleration of an object. Kinematics isalso often described as “the geometry of motion.” We’ll begin with particle kinematics since it isperhaps the simplest Dynamics broad topic and introduces many fundamental sub-topics whichare useful to build upon.
Kinetics investigates why motion occurs and the interaction between loads and mass. Theapproach taken here falls into the category of Newtonian Mechanics since it’s based on theprincipals described by Sir Isaac Newton in 1687. This is considered Classical Mechanics whichalso includes Lagrangian (1788) and Hamiltonian (1833) Mechanics that are reformulations ofNewton’s approach. You’ve likely also heard of Quantum Mechanics which shows that ClassicalMechanics breaks down on the atomic and sub-atomic level. There are many other methods ofstudying motion, but Newtonian remains the cornerstone of an engineering education.
Another categorization of Dynamics topics is by Particles and Rigid Bodies. Particles,covered in Part 1, are point masses whose shapes aren’t considered important enough to beincluded in the analysis. Rigid Bodies, covered in Part 2, have a shape significant enough toinclude the effect of rotation into the analysis, but their flexibility isn’t sufficient to influence theresults.
0.5 COURSE BREAKDOWNThe course companion (Parts 1 and 2) are organized to follow the classes of a typical Dynamicscourse. Part 1 covers Particle Kinematics and Kinetics, and Part 2 covers Rigid Body Kinematicsand Kinetics.
• Part 1:
– Kinematics of Particles1. Rectilinear Motion of Particles2. Special Cases and Relative Motion3. Curvilinear Motion of Particles and Projectile Motion (Rectangular)4. Non-Rectangular Coordinates (Path)5. Non-Rectangular Coordinates (Polar)
– Kinetics of Particles6. Newton’s Second Law in Rectangular Coordinates7. Newton’s Second Law in Path and Polar Coordinates8. Work and Energy, Conservation of Energy9. Work and Energy, Conservation of Energy (Part 2)
10. Impulse and Momentum11. Direct Central Impact

0.6. EQUATION SHEET 512. Oblique Central Impact
• Part 2:
– Kinematics of Rigid Bodies13. Translation and Fixed Axis Rotation14. General Plane Motion, Absolute and Relative Velocity15. Instantaneous Center of Rotation16. General Plane Motion: Acceleration17. General Plane Motion: Acceleration (Part 2)18. Analyzing Motion w.r.t. a Rotating Frame (Coriolis)
– Kinetics of Rigid Bodies19. Mass Moment of Inertia20. Newton’s Second Law in Constrained Plane Motion21. Newton’s Second Law in Translation and Rotation Plane Motion22. Energy Methods23. Momentum Methods24. Eccentric Impact
The topics are broken down in this manner to coincide with a 2 class per week, 14-weeksemester arrangement. Given these 28 possible class periods and subtracting 3 periods for examsthe last day of class for review, 24 classes are available to introduce topics. Note there are twoclasses (9 and 17) that repeat the previous class topic.These are included to givemore emphasis tothose topics that might otherwise be too much information to absorb in one class. Experiencehas shown this to be a practical schedule for this level of an Engineering Dynamics course.Table 0.1 presents a suggested course schedule.
0.6 EQUATION SHEETTable 0.2 presents a suggested equation sheet for instructors who choose to provide one duringexams rather than have students make their own. It is purposefully limited to only two sheets ofequations and does not include every permutation of the equations but enough to avoid students’having to memorize formulae. Students who have the option to write their own equation sheetshould refer to this to ensure they’ve covered all the essentials.

6 0. INTRODUCTION
Table 0.1: Course schedule
Week Class Topic
11 Kinematics of Particles - Rectilinear Motion of Particles
2 Kinematics of Particles - Special Cases: Relative and Dependent Motion
23 Kinematics of Particles - Curvilinear Motion of Particles (Rectangular)
4 Kinematics of Particles - Non-Rectangular Components (Path)
35 Kinematics of Particles - Non-Rectangular Components (Path)
Exam 1 (Covering Classes 1–5)
46 Kinetics of Particles - Newton's Second Law in Rectangular Coordinates
7 Kinetics of Particles - Newton's Second Law in Path and Polar Coordinates
58 Kinetics of Particles - Work and Energy and the Conservation of Energy (Part 1)
9 Kinetics of Particles - Work and Energy and the Conservation of Energy (Part 2)
610 Kinetics of Particles - Impulse-Momentum Method
11 Kinetics of Particles - Direct Impact of Particles and the Conservation of Linear Momentum
712 Kinetics of Particles - Oblique Impact of Particles
Exam 2 (Covering Classes 8–12)
813* Kinematics of Rigid Bodies - Angular Kinematics of Rigid Body Motion
14 Kinematics of Rigid Bodies - Absolute and Relative Velocity
915 Kinematics of Rigid Bodies - Velocity Analysis Using the Instantaneous Center of Rotation
16 Kinematics of Rigid Bodies - Acceleration Analysis (Part 1)
1017 Kinematics of Rigid Bodies - Acceleration Analysis (Part 2)
18 Kinematics of Rigid Bodies - Coriolis Acceleration Analysis
11Exam 3 (Covering Classes 13–18)
19 Kinetics of Rigid Bodies - Mass Moment of Inertia
20 Kinetics of Rigid Bodies - Newton's Second Law in Constrained Plane Motion
21 Kinetics of Rigid Bodies - Newton's Second Law in Translating and Rotating Plane Motion
1322 Kinetics of Rigid Bodies - Rigid Body Work-Energy Method
23 Kinetics of Rigid Bodies - Rigid Body Impulse-Momentum Method
1424 Kinetics of Rigid Bodies - Impact of Rigid Bodies
25 Course Summary and Review for Final Exam
Final Exam (Covering Entire Semester but emphasizing Classes 19–24)
* Classes 1–12 are covered in Engineering Dynamics Course Companion, Part 1: Particles

0.6. EQUATION SHEET 7
Table 0.2: Dynamics exam equation sheet (Continues.)
Particle Kinematics
Velocity and acceleration in rectilinear motion:
v = a = = = v
Uniform translational motion:
r = r 0 + vct x = x0 + vx,ct
Uniformly accelerated translational motion:
v = v0 + a ct vx = (v0)x + ax,ct
r = r 0 + v0t + ½ act2 x = x0 + (v0)xt + ½ ax,ct
2
v2 = v02 + 2ac (r – r 0) vx
2 = (v0)x2 + ax,c(x – x0)
Relative motion of two particles (or points):
rB = rA + r B/A xB = xA + xB/A
vB = vA + vB/A vB = vA + vB/A
aB = aA + aB/A aB = aA + aB/A
Path (tangential and normal) components:
v = vtêt = (v)êt
a= atêt + anên = êt + ên
Polar (radial and transverse) components:
v = vr êr + vθ êθ = (r)êr + (rθ )êθ
a = ar êr + aθ êθ = (r – rθ 2)êr + (rθ + 2rθ )êθ
Rigid Body Kinematics
Rotation about a fi xed axis:
v = = ω × r, ω = ωk = θ k
a = α × r + ω × (ω × r ), α = αk = θ k
at a n
at = rα, an = rω2 (in one plane)
Angular velocity and angular acceleration:
ω = α = = = ω
Uniform rotational motion:
θ = θ0 + ωct
Uniformly accelerated rotational motion:
ω = ω0 + αct
θ = θ0 + ω0t + ½ αct2
ω2 = ω02 + 2αc(θ – θ0)
Velocity in plane motion:
vB = vA + vB/A = vA + ωk × rB/A
Acceleration in plane motion:
aB = aA + aB/A = aA + (aB/A)t + (aB/A)n
= aA + αk × rB/A – ω2 r B/A
Relative Motion on a Rigid Body:
Velocity of a point on a rigid body in plane motion:
vB = v A + ωk × rB/A + vrel
Acceleration of a point on a rigid body in plane motion:
aB = a A + αk × rB/A – ω2 rB/A + arel + 2ω × v rel
d v
dt
dv
dt
v2
ρ
d v
d r
d2 r
dt2d r
dt
d r
dt
d ω
dt
d ω
d θ
d θ
dt
d2 θ
dt

8 0. INTRODUCTION
Table 0.2: (Continued.) Dynamics exam equation sheet
Particle Kinetics
Linear momentum of a particle: L = mv
Angular momentum of a particle: H = r × mv
Newton’s second law: ΣF = ma = L
Equations of motion for a particle:
Cartesian: ΣFx = max ΣFy = may ΣFz = maz
Path coord.: ΣFt = m ΣFn = m
Polar coord: ΣFr = m(r – rθ 2) ΣFθ = m(rθ + 2r θ )
Principle of work and energy:
KE1 + PE1 + U1→2 = KE2 + PE2
Work of a force: U1→2 = ∫ F ⋅ d r
Kinetic energy of a particle: KE = ½ mv2
Potential energy: PEg = mgy, PEsp = ½ kx2
Power and mechanical effi ciency:
Power = = U = F ∙ v or = = Mω
η =
Principle of impulse and momentum for particles:
L1 + IMP1→2 = L
2
Σ mv1 + ∫ F dt =Σ mv 2
Oblique central impact:
(vA)t = (vA)t, (vB)t = (vB')t
mA(vA)n + mB (vB)n = mA (vA)n + mB (vB)n
(vB)n – (vA)n = e[(vA)n – (vB)n]
Rigid Body Kinetics
Mass center: mr = ∑ mi ri
Moments of inertia of masses and radius of gyration:
I = ∫r2 dm k =
Parallel-axis theorem: I = I + md2
Equations for the plane motion of a rigid body:
ΣFx = ma x ΣFy = ma y
ΣMO = Σ(MO )eff = I α + maG rG⁄O
Work of a couple of moment M:
U1→2 = ∫ M ⋅ dθ
Kinetic energy in plane motion:
KE = ½ mv2 + ½ Iω2 = ½ IO ω2
Principle of impulse and momentum for a rigid body:
Syst Momenta1 + Syst Ext Imp1→2 = Syst Momenta2
Angular momentum in plane motion about mass center:
HG = I ω
Principle of impulse and momentum for particles:
(HO)1 +(Ang IMPO)1→2 = (HO)2
Σ Iω1 + Σmv1 × rG⁄O + ∫ Modt = Σ Iω2 + Σmv2 × rG⁄O
dv
dt
dW
dtenergy (or power) output
energy (or power) input
Mdθ
dt
v2
ρ
A2
A1
t2t1
'
'
' '
'
n
i=1
θ2
θ1
t2
t1
I
m

0.7. TEXTBOOKS AND REFERENCES 9
0.7 TEXTBOOKS AND REFERENCESAs this is a course companion, it is likely your instructor will assign another textbook. Below is ashort list of especially well-written textbooks that are often adopted by instructors. While thereare numerous original example problems within this course companion, many of the exampleswere inspired by problems written by others, especially from these four textbooks. Tables 0.3and 0.4 are provided to both give appropriate attribution to the original inspiration and to directinstructors to similar problems for homework and exams. Students and instructors are encour-aged to explore these problems for alternate arrangements, objectives, and solution approaches.Problems marked with an asterisk indicate that the example was inspired by it and/or is similarenough to be considered an adaptation. Below are the four book references.
[1] Beer, F. P., Johnston, E. R., Cornwell, P. J., and Self, B. P. 2018. Vector Mechanics forEngineers: Dynamics, 12th ed., McGraw-Hill Education, New York.
[2] Hibbeler, R. C. 2010. Engineering Mechanics: Dynamics, 12th ed., Prentice Hall, UpperSaddle River, NJ.
[3] Bedford, A. and Fowler, W. L. 2008. Engineering Mechanics: Dynamics, 5th ed., PearsonPrentice Hall, Upper Saddle River, NJ.
[4] Tongue, B. H. 2010. Dynamics: Analysis and Design of Systems in Motion, 2nd ed., JohnWiley & Sons, Hoboken, NJ.

10 0. INTRODUCTION
Table 0.3: Example problem reference correlation for Classes 13–18 (* indicates problem wasinspired by)
Class 13 Class 14
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
13.1 15.4 16-6 17.3 14.1 15.38 16-67 17.26 6.1.20
13.2 15.24 16-7 17.4 6.1.14 14.2 15.39 16-57 17.30
13.3 15.31 16-13 17.6 6.1.47 14.3 15.62 16-70 17.31 6.1.44
13.4 15.9 16-19 17.5 14.4 15.64* 16-75 17.39 6.1.29
Class 15 Class 16
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
15.1 15.74 16-90 17.80 6.2.10 16.1 15.117 16-114 17.85 6.3.9
15.2 15.83* 16-107 17.67 6.2.12 16.2 15.107 16-107 17.87 6.3.15
15.3 15.85 16-88 17.75 6.2.29 16.3 15.120 16-106 17.98 6.3.20
15.4 15.103 16-92 17.70 6.2.11 16.4 15.134 16-112 17.105 6.3.34
Class 15 Class 16
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
17.1 15.135 16-93 17.106 6.3.32 18.1 15.CQ8 16-132 17.118 E6.16
17.2 15.145 18.2 15.153 16-139 17.123 6.4.28
17.3 SP15.16 18.3
17.4 18.4 15.156 17.131
Class 17 Class 18
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
17.1 15.135 16-93 17.106 6.3.32 18.1 15.CQ8 16-132 17.118 E6.16
17.2 15.145 18.2 15.153 16-139 17.123 6.4.28
17.3 SP15.16 18.3
17.4 18.4 15.156 17.131

0.7. TEXTBOOKS AND REFERENCES 11
Table 0.4: Example problem reference correlation for Classes 19–24 and Appendix B (* indicatesproblem was inspired by)
Class 19 Class 20
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
19.1 B.23 17-21 18.85 7.2.31 20.1 16.34* 17-79 18.16 7.2.55
19.2 20.2 16.61 17-117 18.9 7.3.17
19.3 B.3* 21-2 18.95 7.2.11 20.3 16.84 17-60 18.21 7.2.61
19.4 B.31 17-17 18.92 7.2.13 20.4 16.78 17-67 7.2.59
19.5 B.32 17-18 18.94 7.2.27
Class 21 Class 22
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
21.1 16.110 17-88 18.55 7.3.38 22.1 S17.1 18-8 19.36 7.5.3
21.2 SP16.12 17-93 18.66 7.3.26 22.2 17.25 19.20
21.3 16.136 18.65 22.3 17.14 18-54 19.25 7.5.30
21.4 16.142 18.69 22.4 17.40 18-52 19.42
22.5 17.51 19.104 7.5.41
Class 23 Class 24
Ex. [1] [2] [3] [4] Ex. [1] [2] [3] [4]
23.1 17.60 19-7 19.96 7.4.12 24.1 17.97 19-30 7.4.32
23.2 SP17.9 19-33 19-59 7.4.19 24.2 17.127 19.72 7.4.37
23.3 17.87 19-35* 19.55 7.4.20 24.3 SP17.15 19-49 19.75
23.4 17.78 19-23 19.57 7.4.21 24.4 17.129 19-43 19.74
Appendix B.1 Appendix B.2
Prob. [1] [2] [3] [4] Prob. [1] [2] [3] [4]
B.1.1 15.31 16–10* 17.5 6.1.18 B.2.1 B.21 17–15 18.108 7.2.13
B.1.2 15.111 16–57 17.85 6.1.20 B.2.2 16.131 17–93 18.47 7.3.6
B.1.3 15.84 16–76 17.165 6.2.17 B.2.3 16.119 17–92* 18.46 7.3.7
B.1.4 15.94 16–87 17.78 6.2.23 B.2.4 17.14 18–54 19.29 7.5.30
B.1.5 15.98 16–92 17.77 6.2.9 B.2.5 17.28 18–40 19.20 7.5.37
B.1.6 15.123 16–103 17.93 6.3.15 B.2.6 17.130 19–43 19.75 7.4.37
B.1.7 15.125 16–106 17.97 6.3.26 B.2.7 17.138 19–31 19.72 –
B.1.8 15.124 16–110 17.95 6.3.30 B.2.8 17.121 19–49 19.64 –

12 0. INTRODUCTION
OTHER REFERENCES:Below are additional references used while writing Part 2.
• Newton, I. 1687. Philosophiæ Naturalis Principia Mathematica. DOI:10.5479/sil.52126.39088015628399
• Meriam, J. L. and Kraige, L. G. 2012. Engineering Mechanics: Dynamics, vol. 2, JohnWiley & Sons.
• Norton, R. L. 2020. Design of Machinery, 6th ed., McGraw-Hill.
• Myszka, David H. 2012. Machines and Mechanisms: Applied Kinematic Analysis, Pear-son.
• Uicker, J. J., Pennock, G. R., and Shigley, J. E. 2011. Theory of Machines and Mecha-nisms, vol. 1, New York, Oxford University Press.
• To, Cho W. S. 2018. Engineering dynamics. Synthesis Lectures onMechanical Engineer-ing 2.5, pages 1–189. https://doi.org/10.2200/S00853ED1V01Y201805MEC015
• Nelson, E., Best, C. L., Best, C., McLean, W. G., McLean, W. G., and McLean, W.1998. Schaum’s Outline of Engineering Mechanics, McGraw Hill Professional.
• Farrow, W. C. and Weber, R. 1993. Study Guide to Accompany Engineering MechanicsDynamics, Chichester, John Wiley.
• National Council of Examiners for Engineering, 2011. Fundamentals of Engineering:Supplied-Reference Handbook, Kaplan AEC Engineering.
• Diehl, E. J. 2018. Using cartoons to enhance engineering course concepts. ASEE An-nual Conference and Exposition. https://peer.asee.org/authors/39810

13
C L A S S 13
Angular Kinematics of RigidBody Motion
B.L.U.F. (Bottom Line Up Front)
• Rigid Body Motion (RBM) is a combination of translation and rotation.
• Rotation Kinematics has “Fundamental Angular Kinematic Relations.”
– Angular Position � .– Angular Velocity ! D d�
dt.
– Angular Acceleration ˛ D d!dtD
d2�dt2 and ˛ D ! d!
d�.
• Constant Angular Velocity (speed) � D �0 C !t .
• Constant Angular Acceleration ! D !0 C ˛t , � D �0 C !0t C 12˛t2, and !2 D
!20 C 2˛ .� � �0/.
• These relationships are analogous to the translation relations introduced in Class 1(vol. 1).
13.1 INTRODUCTION TO RIGID BODY MOTIONKINEMATICS
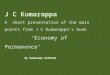
Rigid Body Motion (RBM) differs from the motion of particles in that the object(s) analyzedhave a shape that matters. Figure 13.1 shows Newtdog throwing a boomerang which we’ll useto describe RBM. Note there are two points on the boomerang and the distance between thesetwo points remains constant, therefore it is rigid. We use two points on each rigid body to keeptrack of the motion.
Figure 13.2a shows the boomerang in two dimensions with the two points labeled “A”and “B”. The position vectors, *r A and *r B , completely define the location of the object. Wenote that the relative position vector, *r A=B , remains constant. This is the definition of “rigid”in the RBM, since if the relative position vector were to change the object would be flexible.

14 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
Figure 13.1: Newtdog throws a boomerang, a rigid body that moves with both translation androtation (© E. Diehl).
(a) (b) (c)
y
x
y
x
y
x
vA = vB
vB = 0
vA/B
ωA/B
vA
vB
vB
rA
rA/B
rB
A
B B B
A A
0 0 0
Figure 13.2: Rigid body motion (a) can be described as a combination of translation (b) androtation (c).
Figure 13.2b shows translation of the boomerang while Figure 13.2c shows rotation of the body.The overall motion of the body is the combination of these two motions.
The conclusion we make is the most important thing to remember in RBM Kinematics:
“Rigid Body Motion can be described as a combination of translation and rotation.”
For particle kinematics we only needed translation to fully describe motion. We can useall of what we’ve learned about particle kinematics regarding translation and add rotation to theanalysis. We begin by describing two special cases of RBM velocity: “pure translation” and “purerotation.”

13.2. PURE TRANSLATIONAL VELOCITY OR RIGID BODIES 15
y
x
vA = vB
vB B
A
0
Figure 13.3: Pure translation of a rigid body, repeat of Figure 13.2b.
y
dθ
x
z
vA/B
rA/B
vB = 0
ωAB = ωABk k
B
A
0
Figure 13.4: Pure rotation of a rigid body in one place.
13.2 PURE TRANSLATIONAL VELOCITY OR RIGIDBODIES
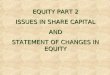
When a rigid body translates but does not rotate we refer to this as “pure translation.” OnFigure 13.3 Points A and B are moving along parallel paths with equal magnitude velocityvectors. This is the definition of pure translation: every point on a rigid body has equal velocity(both magnitude and direction). We also note that the paths remain parallel, similar to an objectriding on rails but without any turning.
13.3 PURE ROTATIONAL VELOCITY OF RIGID BODIESWhen a rigid body rotates about a fixed axis we refer to it as having “pure rotation.” Figure 13.4shows the body rotating about Point B in the x–y plane. The angular velocity of the body isthought of as being about an axis aligned with the Ok unit vector. We use the lowercase Greekletter omega, !, interchangeably with P� to represent the angular speed. We note that the pathof Point A is a circle centered at B . Also note that ! would be positive as drawn in Figure 13.4since we use the right-hand rule where counter-clockwise is considered positive rotation.

16 13. ANGULAR KINEMATICS OF RIGID BODY MOTIONvA = vB
vA/B
ωA/B
vA
vB
vB
rA/B
BBB
AA A
Figure 13.5: The velocity diagram for a velocity analysis.
The velocity of Point A, *vA, is also *v A=B since B is fixed. We define this relative velocityusing vector notation as:
*v A=B D*!AB �
*r A=B :
The cross-product produces a new vector which is perpendicular to the plane of the twocrossed vectors. Since the angular velocity vector is coming out of the page, the velocity vectorends up perpendicular to the position vector and in the plane of the page. Note that A=B appearsin the subscript of both the velocity and position vector. This can help make an associationbetween these two.
13.4 VELOCITY DIAGRAMTo do an organized velocity analysis we will often draw a Velocity Diagram similar to Figure 13.5which pictorially represents an object’s motion broken down into translation and rotation. Thedrawing on the left is the complete motion. The second drawing describes the translation show-ing the velocity of Point B applied to Point A as well so it is pure translation. The third drawinguses Point B as the reference fixed point to describe the pure rotation portion of the motion.
In the next class/chapter we will use this diagram along with vector approaches to performthe velocity analysis in three separate ways. We will also use a similar approach beginning inClass 16 for acceleration analysis.
The remainder of this chapter and the examples which follow focus on the third drawingof the velocity diagram to use angular kinematics with rigid bodies in pure rotation.
13.5 FUNDAMENTAL ANGULAR KINEMATICEQUATIONS
In Section 1.1 (vol. 1) we introduced the “Fundamental Kinematic Equations,” but we only dealtwith translation, so we may have wanted to refer to them as the “Fundamental TranslationalKinematic Equations.” These relate time, position, velocity, and acceleration to one another.

13.6. ANGULAR KINEMATICS SPECIAL CASES 17
Table 13.1: Fundamental kinematic relations corollaries
Angular Kinematics Translational Kinematics
Position θ x, s, r, etc.
Velocity ω = θ = v = x =
Acceleration (function of time) α = θ = = α = z = =
Acceleration (function of position) α α = ω = v
dθ
dt
dω
dt
dω
dθ
dv
dx
dv
dt
d2θ
dt2
d2x
dt2
dx
dt
We now introduce the “Fundamental Angular Kinematic Equations” to relate time, angularposition, angular velocity, and angular acceleration. It’s convenient to think of these as analogousto their translational counterparts when applying them to solve problems. All of the problemtypes presented in Classes 1 (vol. 1) and 2 (vol. 1) (integration, differentiation, and the specialcases) are applicable when solving problems with angular kinematics.
We’ll stick with two-dimensional motion and discuss the scalar versions of the equationsin order to keep the presentation somewhat simplified.
Position is defined by the angle theta, � , measured counter-clockwise from the positivex-axis. The angular velocity is the time rate change of angular position: ! D d�
dtalso written as
P� . Angular acceleration (designated with Greek lowercase alpha, ˛) is the time rate change ofangular velocity and written as ˛ D d!
dtD
d2�dt2 .Theta double-dot ( R�) is also used interchangeably
with alpha (˛). As with translational acceleration there is an alternative angular accelerationwhich is useful when its function is related to position rather than time: ˛ D ! d!
d R�. We know this
to be true because we can rewrite ! D d�dt
as dt D d�!
and substitute it into ˛ D d!dt
.The corollaryrelationships between angular and translational kinematics are summarized in Table 13.1.
13.6 ANGULAR KINEMATICS SPECIAL CASESJust as with translational kinematics we often have special cases where the angular velocity isconstant or the angular acceleration is constant. Table 13.2 presents the corollary equations.
13.7 IMPORTANT IDEAS ABOUT VELOCITY OF RIGIDBODIES
Quite often when doing a two-dimensional analysis of a pure rotational rigid body, it is con-venient to simply find the magnitude of *vA=B D
*!AB �
*r A=B by writing vA=B D !AB rA=B asrepresented in Figure 13.6. We mention this here because we’ll use this simple relationship often

18 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
Table 13.2: Uniform motion kinematic special cases corollaries
Angular Kinematics Translational Kinematics
Position from Constant Velocity θ = θ0 + ωc t x = x0 + vc t
Velocity from Constant Acceleration ω = ω0 + αc t v = v0 + αc t
Position from Constant Acceleration θ = θ0 + ω0 t + ½ αc t x = x0 + v0 t + ½ ac t
Velocity from Constant Acceleration ω2 = ω02
2 2
+ 2αc(θ – θ0) v2 = v02 + 2ac(x – x0)
ωAB
rA/B
vA/B
B
A
Figure 13.6: Velocity due to pure rotational RBM.
(a) (b) (c) (d) (e)
Figure 13.7: Some velocity analysis concepts.
and some students seem to overlook it when it’s presented in the vector form. Note the path inthis pinned link is a circle and, as we know, the velocity is tangent to that path.
Figure 13.7 presents some velocity analysis concepts we’ll use in examples in this and laterclasses.
Attached Points Attached points of two rigid bodies (such as with a pinned joint in Fig-ure 13.7a) have the same velocity (and the same acceleration). This might seem obvious, but

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 19we’ll see as we do RBM problems involving multiple parts that this logic allows us to numeri-cally link components.
Is Angular Velocity about a Specific Point? While we often will say an object rotates abouta particular point, the angular velocity is the same everywhere on the body and isn’t specific tothat point as indicated in Figure 13.7b.
No Slip Wheels The tire shown in Figure 13.7c has a point in contact with the ground. Ifthere is no slipping of the tire (no pealing out or skidding) the velocity at the point of the tirethat touches the ground equals the velocity of the ground: zero. In Class 15 we will see that thispoint is called the “Instantaneous Center of Rotation” and is useful in finding the velocity at anypoint on the tire because angular velocity isn’t specifically about any point.
No Slip Belts and Pulleys In Figure 13.6d we have a belt on a pulley that doesn’t slip. Sincethere is no slip, the velocities at any point where the belt touches the pulley are the same. Oncethe belt leaves the pulley it has the same velocity as on the outside of the pulley since we assumethe belt doesn’t stretch. Again this may seem obvious, but knowing this will help us walk throughthe logic of solving some problems.
Gears Gears have teeth that come in contact periodically. There is an imaginary circle oneach gear called a “pitch circle” and the point at which pitch circles of two gears touch is the“pitch point.” The velocity at this point is the same for both gears because they too cannotslip (without breaking off teeth). As shown in Figure 13.7e, we can find the rotational velocityrelationship based on this common velocity, so vB=A D !AB rB=A D vB=C D !BC rB=C . We cansee that the angular velocity is inversely proportional to the radius (and diameter) of the gears:!BC D !AB
rB=A
rB=C. This is a useful concept for gear train applications.
13.8 ACCELERATION OF RIGID BODIES IN PUREROTATION
The acceleration of points on rigid bodies in pure rotation are readily described using conceptswe covered in Classes 4 (vol. 1) and 5 (vol. 1) on Particle Kinematics. We use the terminologyof path coordinates which has normal and tangential components. In Figure 13.8 we show ageneric link in pure rotation. The acceleration of Point A, which follows a circular path, is madeup of two parts: normal acceleration due to the change in direction and tangential accelerationdue to an increase in speed.
The normal acceleration component is:
.aA/n D !AB2rA=B :
We note that this equation is related to the normal acceleration component we used in particlekinematics, an D
v2
�, because � D rA=B for this link, and v D !ABrA=B . If we substitute these,

20 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
ωAB
(aA)t
(aA)n
αAB
rA/B
B
A
Figure 13.8: Acceleration of rigid body in pure rotation.
an D.!ABrA=B/
2
rA=B, we arrive at the same result. It is also similar to part of the polar coordinates
radial components: r P�2. We recall that the full radial component in polar coordinates was ar D
Rr � r P�2, but since the length of the link doesn’t change (it’s rigid) Rr D 0.The tangential acceleration component is:
.aA/t D ˛ABrA=B :
In this case the tangential component is similar to a part of the transverse component in polarcoordinates: r R� . We recall that the full transverse component in polar coordinates is a� D r R� C
2 Pr P� , but again since the length doesn’t change Pr D 0.When looking for the total acceleration of the end point in a Rigid Body in Pure Rotation,
we write:
aA D
q.aA/2
t C .aA/2n D
q�˛ABrA=B
�2C�!2
ABrA=B
�2:
We will formalize the normal and tangential equations in vector form in Class 16 whenwe begin Rigid Body Acceleration consisting of both translation and rotation.
Example 13.1A small engine (Figure 13.9) is running at its idle speed of 500 rpm counter-clockwise whenthe throttle is increased to full speed of 3600 rpm which takes 10 s. The engine runs for 30 sat full speed before it is turned off and coasts to a rest in 45 s. Determine the total number ofrevolutions the engine rotates from throttle increase to stopping.
Idle speed:
! D
�500 rpm
�.2� rad/rev/
.60 s/min/D 52:36 rad/s:

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 21
ω
α
Figure 13.9: Example 13.1.
Full speed:
! D
�3600 rpm
�.2� rad=rev/
.60 s/min/D 377:0 rad/s:
Acceleration idle to full speed:
! D !0 C ˛t ˛ D! � !0
tD
.377:0/ � .52:36/
.10/D 32:46 rad/s2
:
Angular position when changing from idle to full speed:
�1 D �0 C !0t C1
2˛t2D .0/C .52:36/ .10/C
1
2.32:46/ .10/2
D 2;147 rad:
Angular position after running at constant full speed:
�2 D �1 C !t D .2;147/C .377:0/ .30/ D 13;460 rad:
Deceleration coasting to stop:
! D !0 C ˛t ˛ D! � !0
tD
.0/ � .377:0/
.45/D �8:378 rad/s2
:

22 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
ωA
ωA
A
AB
B
C
C
D
D
Output
Input
Figure 13.10: Example 13.2.
Angular position after coasting to stop:
�3 D �2 C !0t C1
2˛t2D .13;460/C .377:0/ .45/C
1
2.�8:378/ .45/2
D 21;940 rad:
Total Revolutions:� D
.21;940 rad/
.2� rad=rev/D 3;492 rev
� D 3;490 rev :
We could have also used !2 D !20 C 2˛c .� � �0/ to find the number of radians used between
speeds, for instance in the acceleration from idle to full speed:
.377:0/2D .52:36/2
C 2 .32:46/ .�1 � .0// ;
�1 D 2;147 rad which is the same result we had previously.
Example 13.2The two-stage gear train shown in Figure 13.10 is used to reduce the output shaft speed foran engine operating at 1500 rpm. The gear diameters are dA D 80 mm, dB D 160 mm, dC D
120 mm, and dD D 180 mm. Gears B and C attached to the intermediate shaft must turntogether. Determine the speeds of the intermediate and output shafts.
Angular speed of A:
!A D
�1500 rpm
�.2� rad=rev/
.60 s=min/D 157:1 rad/s:
We can break the analysis down by the gear pairs as in Figure 13.11.

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 23
rCrA rB rD
ωA
ωCωD
ωB
vA = vB
vC = vD
A
B C
D
Figure 13.11: Velocities of gears in Example 13.2.
Velocity at point shared by A and B :
vA D vB D rA!A D.0:080/
2.157:1/ D 6:283 m/s:
Angular speed of B :
vB D rB!B !B DvB
rB
D.6:283/
.0:160/ =2D 78:54 rad/s:
!B D.78:54 rad/s/ .60 s/min/
.2� rad=rev/D 750:0 rpm :
Since B and C are on the same shaft and rotate together:
!C D !B D 78:54 rad/s:
Velocity at point shared by C and D:
vC D vD D rC !C D.0:120/
2.78:54/ D 4:712 m/s:
Angular speed of D:
vD D rD!D !D DvD
rD
D.4:712/
.0:180/=2D 52:36 rad/s
!D D.52:36 rad/s/ .60 s/min/
.2� rad=rev/D 500:0 rpm ˚
!B D 750 rpm rpm !D D 500 rpm ˚ :
We can see that each stage reverses the direction of rotation. The overall gear ratio is1:3 reducing. This calculation could have been done in one step, omitting unit conversions andwithout changing diameter to radius, as these cancel out. So:
!D DdA
dB
dC
dD
!A D.80/
.160/
.120/
.180/.1500/ D 500:0 rpm:

24 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
A
BC
D
G
H
E
F
θ
Figure 13.12: Example 13.3 (© E. Diehl).
Example 13.3Newtdog cranks an unnecessarily complicated conveyor belt machine (Figure 13.12) to moveWormy’s basket of apples (W D 30 lb) upward at an angle of � D 20ı. He starts turning thecrank of the stopped machine, increasing his cranking speed for one minute until the basket isgoing up the belt at 3 ft/s without slipping. The pulley dimensions are rA D rC D 9 in and rB D
rD D rG D rH D 4 in, and the gear dimensions are dE D 20 in and dF D 12 in. The frictionof the system causes an efficiency of � D 25%. Determine Newtdog’s full speed cranking anddirection when he finishes, the total acceleration magnitude of a point on gear E just before hereaches full speed, and the power Newtdog is applying at the crank.
This type of problem requires us to use multiple concepts. So let’s work backward and seewhere we go.
The final velocity of Wormy’s basket is v D 3 ft/s which takes t D 60 s. The accelerationof the conveyor belt is:
v D v0 C at:
a Dv � v0
tD
.3/ � .0/
.60/D 0:05 ft=s2:
We can start walking through the mechanism backward. The conveyor belt speed andacceleration are applied to a sketch of the elements separated (Figure 13.13).The included arrowsassist in visualizing the direction of each component.
The conveyor belt speed and acceleration are the same as a point on pulley G so:
vG D 3 ft=s aG D 0:05 ft=s2:

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 25
Figure 13.13: Component velocities and accelerations of Example 13.3.
Pulley G and gear F angular speed and acc:
!G D !F DvG
rG
D.3/
.9/=12D 4:000 rad/s
˛G D ˛F DaG
rG
D.0:05/
.9/=12D 0:06667 rad/s2
:
Gear F and gear E teeth speed and acc:
vF D vE D !F rF D .4:000/.12/
.12/ .2/D 2:000 ft=s
aF D aE D ˛F rF D .0:06667/.12/
.12/ .2/D 0:03333 ft=s2:
Gear E and pulley D angular speed and acc:
!E D !D DvE
rE
D.2:000/
.20/
.12/ .2/
D 2:400 rad/s
˛E D ˛D DaE
rE
D.0:03333/
.20/
.12/ .2/
D 0:04000 rad/s2:
Pulleys D and C belt speed and acc:
vD D vC D !DrD D .2:400/ .4/=12 D 0:8000 ft=s

26 13. ANGULAR KINEMATICS OF RIGID BODY MOTION
aD D aC D ˛DrD D .0:04000/ .4/=12 D 0:01333 ft=s2:
Pulleys C and B angular speed and acc:
!C D !B DvC
rC
D.0:8000 /
.9/=12D 1:067 rad/s
˛C D ˛B DaC
rC
D.0:01333/
.9/=12D 0:01778 rad/s2
:
Pulleys A and B belt speed and acc:
vB D vA D !BrB D .1:067/ .4/=12 D 0:3556 ft=s
aB D aA D ˛BrB D .0:01778/ .4/=12 D 0:005926 ft=s2:
Pulley A angular speed and acc:
!A DvA
rA
D.0:3556/
.9/=12D 0:4741 rad/s D .0:4741 rad/s/ .60 s=m/
.2� rad/s/ D 4:527 rpm
˛A DaA
rA
D.0:005926/
.9/=12D 0:007901 rad/s2
:
Newtdog must crank the handle:
!A D 4:53 rpm ˚ and ˛A D 0:00790 rad/s2 ˚ :
The total acceleration of a point on Gear E:
.aE /n D !E2rE D .2:400/2 .20/
.12/ .2/D 4:800 ft=s2
.aE /t D ˛E rE D .0:04000/.20/
.12/ .2/D 0:03333 ft=s2 .already found as “aE ”/
aE;total D
q.aE /2
t C .aE /2n D
q.0:03333/2
C .4:800/2D 4:800 ft=s2
aE;total D 4:80 ft=s2 :
We note that the normal acceleration is so much larger than the tangential that there’s nopractical difference between it and total acceleration.
To get the power we will find the force applied by the conveyor belt onto the basket. Thisis a frictional force that must address that the basket is accelerating, so we need an FBD/IBDpair.

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 27
FBD IBD
FN
max'
y'
x'
Ff
θW
Figure 13.14: FBD/IBD pair of Example 13.3 (© E. Diehl).
&X
Fx0 D max0
� Ff CW sin � D �max0
Ff D max0 CW sin � D
�30
32:2
�.0:05/C .30/ sin
�20ı
�D 10:31 lb:
The power required at the basket is:
P D F v D.10:31 lb/ .3 ft=s/�
550ft � lb=s
hp
� D 0:05622 hp:
The powered required at the crank:
�ovr DWYWWYPF
DPWYW
PWYPFD
.0:05622/
PWYPFD 0:25 PWYPF D 0:2249 hp
P D 0:225 hp :
Example 13.4The angular acceleration of a turbine due to aerodynamic drag on the rotating surfaces is empir-ically determined to equal ˛ D
�1:25 � 10�3
�!2. How much time does it take for the turbine to
change speed from 100 rpm to 500 rpm, and how may revolutions?

28 13. ANGULAR KINEMATICS OF RIGID BODY MOTIONThe turbine speeds converted into radians per second:
!1 D
�100 rpm
�.2� rad=rev/
.60 s/min/D 10:47 rad/s
!2 D
�500 rpm
�.2� rad=rev/
.60 s/min/D 52:36 rad/s:
We recognize that the angular acceleration is a function of angular speed, and since weare first interested in time we use the following:
˛ Dd!
dt
dt D1
˛d!Z t
0
dt D
Z !2
!1
1
˛d!
Z t
0
dt D t D
Z !2
!1
1�1:25 � 10�3
�!2
d! D �1�
1:25 � 10�3�
!
ˇˇ!2
!1
D �1�
1:25 � 10�3� � 1
!2
�1
!1
�t D �
1�1:25 � 10�3
� � 1
.52:36/�
1
.10:47/
�D 61:13 s
t D 61:1 s :
To find the number of revolutions we can use the other acceleration relation:
˛ D !d!
d�
d� D!
˛d!Z �
0
d� D
Z !2
!1
!
˛d!
Z �
0
d� D � D
Z !2
!1
!�1:25 � 10�3
�!2
d! D
Z !2
!1
1�1:25 � 10�3
�!
d! D1�
1:25 � 10�3� ln !
ˇˇ!2
!1
� D1�
1:25 � 10�3� .ln !2 � ln !1 / D
1�1:25 � 10�3
� .ln .52:36/ � ln .10:47/ / D 1;288 rad
� D.1;288 rad/
.2� rad=rev/D 204:9 rev

13.8. ACCELERATION OF RIGID BODIES IN PURE ROTATION 29
� D 205 rev :
This last example is included to re-emphasize that acceleration isn’t always constant, evenwith angular acceleration. Note that this is a somewhat realistic scenario. Since drag force isproportional to the fluid velocity squared and remembering force is also proportional to accel-eration, a proportional relation between angular acceleration and angular speed squared mightalso be anticipated.