Embed Size (px)
Citation preview

The Two-Stage Method forMeasurement Error Characterization
Sean J. Canavan and David W. Hann
ABSTRACT. A measurement error (ME) is a component of any study involving the use ofactual measurements, but is often not recognized or is ignored. The consequences of ME onmodels can be severe, affecting estimates of tree and stand attributes and model parame-ters. Although correction methods do exist for countering the effects of ME, the use of thesemethods requires knowledge of the distribution of the errors. A new method for modelingerror distributions, called the two-stage error distribution (TSED) method, is presented here.This method is compared with traditional methods for error modeling through an exampleusing diameter and height ME. Comparisons between the fitted error distribution surfacesand the empirical error surface are based on a dissimilarity measure. The results indicatethat the TSED method produces a much more accurate and precise characterization of theME distribution than do traditional methods when a high percentage of errors is identical. Inother cases, the TSED method works as well as the most accurate form of the traditionalmethod. The TSED method is also expected to perform better at characterizing asymmetricdistributions. It is therefore more adaptable than traditional methods and is being proposedfor error modeling in the future. FOR. SCI. 50(6):743–756.
Key Words: Measurement error, statistical distribution, modeling, nonlinear regression,multinomial regression.
A MEASUREMENT ERROR (ME) arises when there is adifference between an observed or estimated valuefor an attribute and the actual, or population, value
for the attribute. Because of the level of precision to whichmeasurements are made, MEs are unavoidable, and increas-ing the sample size is typically not a viable method forreducing their effects. Rather than canceling out, the MEeffects may be cumulative. MEs may be sorted into threecategories (Gertner 1986, 1991):
Mensuration Error.—This error arises when a recordedvalue is not exactly the same as the true value because of aflaw in the measurement process.
Grouping Error.—This error occurs when a model iscalibrated using a predictor variable rounded to one level ofprecision and is then applied with the same variable roundedto a different level of precision. Errors caused by groupinginto classes are also in this category.
Sampling Error.—This is an error in an estimate of apopulation parameter that results when only a portion of thepopulation is used to make the estimate (Jaakkola 1967,Smith and Burkhart 1984, Gertner 1986, Stage and Wykoff1998). The size and distribution of the error depends on thesampling design, including sample size, plot size, plotshape, sampling method, and definition of the population,among other factors (Kulow 1966, Gertner 1991), and canalso be affected by grouping error.
Considerable work has been done outside of forestry onthe consequences of ME (i.e., Fuller 1987, Carroll et al.1995). As Kangas (1998) cited, depending on the relation-ships between the measured and true values of a variableand the other variables in a model, it may be the case that (1)the real effects of ME are hidden, (2) observed data displayrelationships that are not present in the true data, or (3) thesigns of the estimated coefficients are changed (Carroll et al.
Sean J. Canavan, Biometrician, FORSight Resources, LLC, Park Tower One, 201 SE Park Plaza Dr., Suite 283, Vancouver,WA 98684—Phone: 360-260-3281; Fax: 360-254-1908; [email protected]. David W. Hann, Depart-ment of Forest Resources, Oregon State University, Corvallis, OR 97331-5752—Phone: 541-737-2687; Fax 541-737-3049;[email protected]. This is paper 3529 of the Forest Research Laboratory, Oregon State University, Corvallis,OR 97331-5704.
Manuscript received October 24, 2002, accepted April 12, 2004. Copyright © 2004 by the Society of American Foresters
Forest Science 50(6) 2004 743

1995). In simple linear regression, the effect of ME in thepredictor variable is to attenuate the value of the slopeparameter (Fuller 1987), causing the relationship betweenthe independent and response variables to appear weakerthan it actually is.
The consequences of ME in forestry data have also beenexamined and are summarized in Canavan (2002). Biasedand imprecise estimates of stand and tree attributes mayresult from the presence of ME, possibly affecting manage-ment decisions as a result. In addition, forest models can bestrongly affected by ME. An assumption of regression isthat the predictor variables are measured without error. Biashas been demonstrated in model parameter estimates andmodel predictions resulting from mensuration error (Gertnerand Dzialowy 1984, Gertner 1991, Kozak 1998, Wallachand Genard 1998, Kangas and Kangas 1999), grouping error(Swindel and Bower 1972, Smith and Burkhart 1984, Kan-gas 1996, Ritchie 1997), and sampling error (Kulow 1966,Jaakkola 1967, Nigh and Love 1999). The precision ofestimates has also been shown to change because of men-suration error (Garcia 1984, Gertner 1984, Gertner andDzialowy 1984, Paivinen and Yli-Kojola 1989, McRobertset al. 1994, Kangas 1998, Kozak 1998, Wallach and Genard1998), grouping error (Kmenta 1997), and sampling error(Kulow 1966, Smith 1975, Hann and Zumrawi 1991, Reichand Arvanitis 1992).
Smith (1986) demonstrated the attenuation derived byFuller with forestry data. Kangas (1998) found that mensu-ration error in one predictor variable of a model affected theregression coefficients of all predictor variables with whichthe contaminated predictor variable was correlated.Hasenauer and Monserud (1997) did a comparison of fitsusing observed and predicted crown ratio, and showed thatthe effect of crown ratio as a predictor was considerablyreduced when its predicted value was used in place of theactual sampled value.
The distribution of the errors can be used to evaluate andpossibly correct for the effects of ME. The distribution of avariable can be specified by either a probability densityfunction (PDF) or a cumulative distribution function (CDF).The PDF and CDF of many common distributions can becompletely specified if their mean and variance are known.
Whether a variable is continuous or discrete affects theform of the variable’s PDF and CDF. Theoretically, mostMEs are continuous variables. If measurements are made toa high enough level of precision, any value could beachieved. In practice, all MEs are constrained to a particularset of values by the measurement process. For example,diameters at breast height (D) are typically measured to thenearest 0.1 in. in the USA, causing the resulting ME toappear to be limited to values that are multiples of 0.1 in. Inthis way, they appear discrete. This operational form of theerror is the form that must be dealt with in practice. Thetheoretical distributions may be continuous, but their prac-tical construction will reflect the discrete nature of the datasets used to model them.
The objective of this analysis is to compare a newmethod for modeling these error distributions that takes into
account the discrete nature of the data and the continuousnature of the error distribution, with traditional methods oferror distribution modeling. A description of the traditionalmethods and their positive and negative aspects is followedby a description of a new method called the two-stage errordistribution (TSED) modeling method. The methods arethen applied to actual ME data for two variables and com-pared based on their abilities to model the empirical errordistributions.
The notation used here will be as follows. The true valueof a variable x will be denoted by xT, and the measuredvalue of x will be denoted by xM. The error in a measure-ment of x will be denoted by �x, where xM � xT � �x. Thenegative, zero, and positive errors in x will be denoted by�x
�, �x0, and �x
�, respectively. The total number of observedvalues of �x will be denoted by n, and the number of errorsin �x
�, �x0, and �x
� will be denoted by n�, n0, and n�,respectively. The mean of the �x values will be denoted by�(�x) and the standard deviation by �(�x).
Traditional Methods
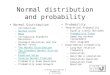
Several studies in forestry have examined the effects ofrandomly generated ME on models. These studies havetraditionally assumed that the errors were normally distrib-uted (Nester 1981, Garcia 1984, Smith 1986, Paivinen andYli-Kojola 1989, Gertner 1991, McRoberts et al. 1994,Kangas 1996, 1998, Kozak 1998, Kangas and Kangas 1999,Phillips et al. 2000, Williams and Schreuder 2000). TheCDF for the normal distribution is shown as the sigmoid-shaped curves in each curve comparison in Figure 1.
The ME studies cited above, in which a normal distri-bution was assumed and may be separated into three cate-gories regarding �(�x):
1. Those that have assumed �(�x) to be zero
2. Those that have assumed �(�x) is a constant other thanzero
3. Those that have assumed �(�x) changes as a functionof x.
A value of �(�x) other than zero implies that the distributionof the ME contains a bias. The average of a random sampleof values from the distribution is not expected to be zero inthis case. A nonconstant value of �(�x) may be expressed asa function of xM and other attributes, z1, z2, . . . , zk, that mayhave an effect on the accuracy of the measurements. Forexample, the steepness of the ground’s slope under the plotor tree, the weather conditions during measurement (e.g.,sunny, cloudy, rainy), and variation in the proficiency ofmeasurement personnel can all affect the degree of accuracyof forest measurements. The variable xM is used instead ofxT because, in application, xT is unknown. The majority ofME studies in forestry have assumed that �(�x) � 0.0. Anexample of a case in which the authors allowed �(�x) tovary is Larsen et al. (1987). In this study, the mean of theME for tree height (H) was found to change with HM.
The three characterizations of �(�x) may each be furtherseparated into those that assume �(�x) is constant and those
744 Forest Science 50(6) 2004

that allow �(�x) to vary, giving six possible types of normaldistributions. The assumption that �(�x) is constant impliesthat errors do not become more or less variable as the valueof xM changes. Allowing �(�x) to vary in size indicates thatthe width of the distribution is different for different valuesof xM. Similar to �(�x), nonconstant values of �(�x) may beassumed to be a function of x and other variables. Nearly allstudies in forestry involving ME have assumed that �(�x)was constant. An example of a study in which the authorsallowed �(�x) to vary is McRoberts et al. (1994).
Characterizing the normal distribution requires modeling�(�x) and �(�x). Traditionally, �(�x) is modeled first. Thefitted values for �(�x) are then subtracted from the observedvalues of xM. The resulting bias-corrected data is used tomodel �(�x). This is done through experimentation to find atransformation of the bias-corrected data that produces val-ues with homogeneous variance. Back-transforming a suc-cessful transformation will give a function for the hetero-geneous variance of the bias-corrected data.
Although it may often be easy to model the normaldistribution, it is often not the appropriate choice. Thenormal distribution assumes symmetry about �(�x), makingit inappropriate for asymmetric distributions. It becomes apoorer choice as the degree of asymmetry increases. Thenormal distribution also does not allow for relatively highconcentrations of individual values. In a situation for whichthe distribution is highly concentrated at a single value, forexample at the value zero, the PDF would show a spike atzero and the CDF would have a vertical straight-line sectionat zero. The normal distribution does not allow for large
probabilities at singular values. This behavior is a concernin ME modeling, because certain types of measurementsmay be expected to be correct a high proportion of the time.A comparison between the normal distribution and a distri-bution with increasing amounts of correct measurements isshown in Figure 1. In Figure 1a, the case of 25% correctmeasurements, the differences between this and the normalCDF are significant at the � � 0.05 level, according to theKolmogorov test, if more than 115 observations are used(Conover 1971). This number decreases to 28 observationsfor the case where 50% are correct (Figure 1b), 12 obser-vations for the case where 75% are correct (Figure 1c), and6 observations for the “ideal” case (Figure 1d) in which allthe measurements are correct.
For the “ideal” case, �(�x) would be equal to zero. ThePDF would be entirely concentrated at �(�x) with no othervalues of �x having positive probability. If �(�x) � 0.0, thenthe resulting CDF would describe the ideal situation of noME (Figure 1d). This situation cannot be modeled with thenormal distribution, however, because of the requirementthat the standard deviation be greater than zero. Othercommon distributions suffer from the same limitation.
Two-Stage Error Distribution Method
A new approach to modeling ME presented here, whichallows for the vertical behavior of the CDF at zero or anyother point, uses a TSED. Models of this type are not newin forestry. Hamilton and Brickell (1983) described a two-stage model for a two-state system and applied it to estima-tion of cull volume in standing trees. The model described
Figure 1. Comparison between the normal cumulative distribution function and distributions withincreasing percentages of correct measurements.
Forest Science 50(6) 2004 745

here is similar in design. However, it may be applied toproblems with two or more error-type states (e.g., �x
�, �x0,
�x�). In the first stage, the probabilities of the different types
of errors are modeled. These probabilities provide theheights of the different sections of the CDF correspondingto the different error types. In the second stage, the portionsof the CDF curve corresponding to the different error typesare modeled. For an error type consisting of a single value,such as �x
0, the shape of the CDF is a vertical line, as seenin Figure 1d.
Stage 1: Error-Type Probability ModelingIn the first stage, the probabilities of the different types
of errors are modeled. These error types may be any parti-tion of the range of error values for which the partitionelements are each a single value or a single segment of thereal-number line. The simplest partition with meaningwould include two-error types, for example {�x
�, �x�0}. The
partition that will be used in the application comparison is{�x
�, �x0, �x
�}.A description of the modeling procedure will begin by
considering the case for which the probabilities of the errortypes, Pr(�x
�), Pr(�x0), and Pr(�x
�), for example, are constantacross x. This will be followed by a description of themodeling procedure for the case in which the error-typeprobabilities change as x changes.
Case 1: Constant Error-Type ProbabilitiesConstant error-type probabilities across xM will arise
when the size of the object x does not affect the ability tomeasure it accurately. Modeling the probabilities [Pr( )] inthis case is done by using simple proportions. Pr(�x
�) isestimated by (n�)/n, and Pr(�x
�) is estimated by (n�)/n. Bydefinition, Pr(�x
0) � 1.0 � Pr(�x�) � Pr(�x
�). When no bias
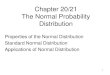
is present, Pr(�x�) � Pr(�x
�) (e.g., Figure 2a). Bias is presentwhen Pr(�x
�) � Pr(�x�), and they are estimated by the
proportion of observed errors in each of the two error types(e.g., Figure 2b).
Case 2: Non-Constant Error-Type ProbabilitiesIn forestry situations, it is more likely that the error-type
probabilities will not be constant. Measurements such as Dand H are increasingly more difficult to make without erroras the size of the tree being measured increases. Errors ofthis type may also be unbiased (e.g., Figure 2c) or they maybe biased (e.g., Figure 2d). In either situation, using simpleproportions is not possible. When only two error types, forexample {�x
�, �x�0}, are involved, logistic regression as a
function of tree size [g(x)] can be used to characterize theprobabilities:
Pr(�x�) �
1
1 � eg� xM� Pr��x�0� �
eg� xM�
1 � eg� xM�
When there are more than two error types, multinomialregression as a function of tree size may be used to char-acterize them:
Pr��x�� �
1
1 � eg1� xM� � eg2� xM� Pr��x0� �
eg1� xM�
1 � eg1� xM� � eg2� xM�
Pr��x�� �
eg2� xM�
1 � eg1� xM� � eg2� xM� (1)
These models are an extension of the logistic model. Lo-gistic regression and multinomial regression meet the re-quirements of non-negative fitted probabilities that sum to
Figure 2. Error-type probability graphs; (a) constant and unbiased, (b) constant and biased, (c)nonconstant and unbiased, (d) nonconstant and biased.
746 Forest Science 50(6) 2004

1.0. Other procedures meeting the same requirements mayalso be used.
Stage 2: Modeling the CDF Curves within theError Types
In the second stage, the parts of the CDF curve corre-sponding to the different error types are modeled and com-bined with the error-type probabilities from the first stage tobuild the fitted CDF surface. Modeling is done separatelyfor each error type, because curve forms may differ acrosserror types. For modeling purposes, the curve in each errortype is considered a CDF itself. This allows each curve to befit easily using the same equation form and then scaled tothe correct height using the error-type probabilities.
Modeling the CDF for a particular error type begins withgrouping the errors into classes based on the size of x. Theclasses must be defined in a manner such that there areenough observations in each of them to reasonably approx-imate the form of the corresponding CDF for that class. Aminimum of 10 observations per size class should be suf-ficient, based on asymptotic distribution discussions (Coch-ran 1952). Therefore, the widths of the size classes mayneed to change as x changes. Errors within each size classare then further separated into error classes. Widths of theseerror classes should be small to provide precise informationabout the form of the CDF for the size class.
Cumulative probabilities are then calculated separatelyfor the negative and positive errors in a size class. As withall CDFs, these probabilities are calculated from left to rightalong the real number line, with each error class beingassigned the proportion of the total number of observationsin the size class that are within or smaller than the errorclass. These cumulative probabilities are used to approxi-mate the form of the CDF for the size class.
The next step in the curve-modeling process is to choosea model form for the size class CDF within an error type.Plotting the CDF for different size classes will give anindication of what model forms may be used. Errors areunintentional and larger values are much less likely to occurthan smaller values, but their likelihood often increases withx. Therefore, the model form chosen must favor small errorsover large errors, but must allow this relationship to changeas the size of xM changes. The exponential CDF would be alogical choice for modeling CDFs of this form because itnaturally allows for modeling situations where the proba-bility decreases quickly as the magnitude of the errorincreases:
F�x���x
�� � Pr��x� � �x
�� � 1 e�x��
, � � 0 (2)
F�x���x
�� � Pr��x� � �x
�� � 1 e��x��
, � � 0 (3)
In addition, it has a single parameter that appears only oncein the function and can itself be easily modeled as a functionof xM. As a result, the CDF for errors in xM can be fit as anexponential function across different xM size classes withhigh predictive power. The exponential PDF may appear abetter choice in certain cases, but very commonly results infunctions with low predictive power. Its functional form is
f�x���x
�� � Pr��x� � �x
�� � �e�x��
, � � 0
f�x���x
�� � Pr��x� � �x
�� � �e��x��
, � � 0
The parameters � and � appear in two places in eachequation and must be the same in both places for theequations to integrate to 1.0 as required. Our experienceindicates that this restriction makes the PDF less tenablethan the CDF function and can lead to considerably poorerfits when modeling the distribution of ME. Functions otherthan the exponential may be used, provided they have thedesired curve form, produce cumulative probabilities begin-ning at zero and summing to 1.0, and are monotonicallyincreasing, right continuous, and flexible in form.
A constant – or � value in Equations 2 or 3 results ina two-dimensional exponential CDF function. Modeling –
or � as a function of xM and possibly other variables z1,. . ., zk results in a multi-dimensional exponential CDF. Tomodel a three-dimensional exponential CDF equation, two-dimensional exponential CDF equations are first fitted sep-arately to each size class of x. The resulting parameterestimates of 1
�, . . . , t�, or, 1
�, . . . , j� are then modeled
as a function of the size-class midpoints. This function isused to replace – or � in Equations 2 or 3, and the entirefunction can be fit across all size-class values of xM simul-taneously. As a result of this process, each unique value ofxM is characterized by a unique two-dimensional exponen-tial CDF for both �x
� and �x�.
Discrete measurements affect how the CDF modelsshould be estimated to maximize their predictive ability. Forexample, if both xT and xM are reported to the nearest 0.1unit, then �x is restricted to integer multiples of 0.1 units. Insuch a case, the smallest value of �x
�, min(�x�), is 0.1 unit.
Assigning positive probability to the range of impossiblevalues between zero and min(�x
�) will bias some or all of theother positive error probabilities downward. This is also truefor the negative errors. To eliminate this bias, the ME CDFshould be horizontal in the intervals [max(�x
�, 0) and (0,min(�x
�)]. This is accomplished by fitting the model withthe transformation of xM � max(�x
�) for the negative errorsand xM � min(�x
�) for the positive errors. The exponentialCDF model then becomes
FY��y� � 1 ey�
, y � 0, � � 0
� 1 e (xM�max��x��)�
xM � max��x��, � � 0 (4)
FY��y� � 1 e�y�
, y � 0, � � 0
� 1 e�� xM�min��x����
xM � min��x��, � � 0 (5)
The result is to shift the CDF curves in Equations 2 and 3 sothat positive probability is not assigned to negative errorsgreater than max(�x
�) or positive errors less than min(�x�).
The probability of �x� values falling at min(�x
�) is oftenlarge. When this occurs, a vertical section at min(�x
�) mustbe incorporated into FY
�(y) to accurately model the distri-bution of the positive errors. The size of the vertical sectionfor an observation of size x is equal to the Pr(min(�x
�)).
Forest Science 50(6) 2004 747

Without this section, the Pr(min(�x�)) would be assigned a
value of zero, because FY�(y) begins at 0.0 before increasing
to 1.0. Building the vertical section into FY�(y) is done by
first modeling Pr(min(�x�)). Logistic regression is an appro-
priate choice for modeling probabilities, with the logisticmodel being a function of xM and possibly other variables,
Pr(min��x��) �
eh� x, z1, . . . , zk�
1 � eh� x, z1, . . . , zk� (6)
This is then included in the CDF model for positive errorsas
FY��y� � 1 �1 Pr(min��x
���]ey,
y � x min��x�� � 0, � 0. (7)
This model has a value of Pr(min(�x�)) when y is zero and
approaches 1.0 as y approaches �, as desired.Once the positive and negative error CDF models have
been fit for the upper and lower portions of the overallcurve, they can be combined with the error-type probabili-ties to give the function for the entire ME CDF surface as
F�x��x� � Pr��x � �x�
� �Pr��x�� � FY
���x�Pr��x
�� � Pr��x0�
Pr��x�� � Pr��x
0� � Pr��x�� � FY
���x�
�x 0�x � 0�x � 0
(8)
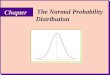
An example of the CDF for a particular size class resultingfrom an application of Equation 8 is shown in Figure 3.
Traditional Method and TSED ApplicationComparison
To demonstrate the traditional and TSED procedures,both were applied to the problem of characterizing thedistribution of mensuration errors arising from the measure-ment of D and H taken before and after trees were felled forstem analysis. Therefore, DM and HM are defined as themeasurements taken on the standing trees, and DT and HT
are defined as the measurements taken after stem analysis.The data come from two studies associated with the
development of the Southwest Oregon version of the OR-GANON growth-and-yield model.[1] A detailed descriptionof the geographic and age ranges of the data is provided inHanus et al. (2000). D and H were measured on all trees tothe nearest 0.1 in. and 0.1 ft, respectively. DM measure-ments were made with a diameter tape. HM measurementswere made directly with a 25- to 45-ft telescoping pole forsmaller trees, and indirectly using the pole-tangent method(Larsen et al. 1987) for larger trees. Felled-tree D measure-ments were made with a caliper to measure both the longestand shortest axes after sectioning the tree at 4.5 ft. DT wasdefined as the arithmetic mean of the two measurements. HT
measurements were made on the felled trees with a tape.Because of the number of different ways to measure treediameter, there is no accepted strict definition as to whatconstitutes the true diameter of a tree in the absence ofcircularity (Gregoire et al. 1990). Keeping this in mind,along with the fact that the point here is to illustrate a newtechnique, using these measurements as surrogates for theunknowable true values was deemed acceptable. This wasbased also on the extreme care and attention to accuracy instem analysis measurements, which are thought to lead tosubstantially smaller errors and error variances than othermeasurement methods. Five species groups were includedin the analysis: Douglas-fir (Pseudotsuga menziesii (Mirb.)Franco), true fir (Abies grandis (Dougl. Ex D. Don) Lindl.and Abies concolor (Gord. & Glend.) Lindl. Ex Hildebr.),ponderosa pine (Pinus ponderosa Dougl. Ex Laws.), sugarpine (Pinus lambertiana Dougl.), and incense cedar (Libo-cedrus decurrens Torr.).
There were 2,175 trees included in the D applicationexample, ranging in DM from 0.8 in. to 72.1 in. All DM
measurements were taken on the same day the tree wasfelled and measured for DT to eliminate confounding effectsbecause of diameter growth. Standing and felled heightmeasurements were taken on different days for some trees.To avoid errors confounded with height growth, trees forwhich the standing height measurement was taken in thegrowing season, May 1–Aug. 15 (Jablanczy 1971, Emming-ham 1977), were only included if the felled-height measure-ment was taken within five days of the standing measure-ment. HT to the tip of the tree was used in this case and forcases in which both measurements were taken in the samenongrowing season. HT to the last whorl was used if HM
was taken outside the growing season and HT was takenwithin the growing season or if measurements were made inconsecutive nongrowing seasons. The resulting data setcontained 1,238 tree records, with HM ranging from 8.4 to231.7 ft.
Eight alternate ME CDF surfaces were compared witheach of the actual ME CDF surfaces for the samples ofobserved values of �D and �H. The first alternative surface,called the “base fit,” assumed all errors to be zero. Theresulting base fit CDF has a vertical section at zero of length1.0 for each value of �D and �H. This was considered thesimplest fit to the data and the ideal fit, in that it assumes nomeasurement error. Its purpose was to provide a measure ofthe improved or worsened fit of the TSED over the six
Figure 3. Example of combined CDF graph for a single sizeclass.
748 Forest Science 50(6) 2004

traditional-method fits when compared to the actual ME CDFsurfaces for the samples of observed values of �D and �H.
D AnalysisBy definition, �D � DM � DT, which led to 1,278
positive, 368 zero, and 529 negative �D values.
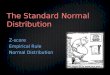
Traditional Distribution ModelingA plot of the actual �D CDF surface (Figure 4) indicates
that an error distribution with a nonconstant �(�D) and anonconstant �(�D) is appropriate. In this example, the nor-mal distribution was used with each of the six (�(�D),�(�D)) combinations discussed previously, to examine howincreased information improves the CDF surface model.This will also provide an indication of how well previousstudies have approximated this distribution.
Details of fits for �(�D) and �(�D) are found in Table 1.Six alternative normal distributions were created based onthe results of these fits (Table 2). Cumulative distribution-function surfaces were generated for each of the six distri-butions. Figure 5 illustrates the resulting CDF for Normal 6,the normal distribution that best matched the behavior ob-served with the actual CDF.
TSED Distribution ModelingStage 1.—The changing location and slope of the actual
CDF as D changes (Figure 4) indicates that the error-typeprobabilities are not constant. Because there are three errortypes, {�x
�, �x0, �x
�}, multinomial regression was used tomodel the error-type probabilities in Equation 1. This wasdone in S-plus using a generalized linear model with thePoisson link function (Schafer 1998). The data were grouped
by error type into 1-in. D classes for trees less than 26.1 in.Because of the smaller number of larger trees, trees 26.0 in.and �38.1 in. were grouped into 2.0-in. classes. The remaining31 trees with diameters �38.1 in. and having a mean of �45.0in. were grouped together into one class and assigned a valueof 45.0 in. All classes contained at least 10 trees.
Equation 1 was fit with g1 and g2 being linear functionsof D, D2, D1/2, and D�1. These variables and a variableindicating error type were included as factor variables.Interactions between the D variables and the error-typevariable were also included. Parameter estimates for theinteraction terms from this fit are equal to the multinomialmaximum likelihood estimates of the model parametersbased on multinomial likelihood (McCullagh and Nelder1995). Fitted models were tested for overdispersion usingquasilikelihood to determine whether extra-multinomialvariation was present. The overdispersion parameter wasestimated to be 1.0367, with a 95% confidence interval of(0.6645, 1.4030), indicating a lack of overdispersion. Themodels were then refit without using quasilikelihood. TheD�1 terms in g1 and g2 were insignificant and were droppedfrom the model. Refitting indicated that g1 was not signif-icantly different from zero. The probability of a negativeerror is not significantly different from the probability of azero error within each size class. The appropriate reducedmodel forms were then
Pr��x�� �
1
2 � �1 � eg2�x��Pr��x
0� �1
2 � �1 � eg2�x��
Pr��x�� �
eg2�x�
1 � eg2�x� (9)
Counts for the negative and zero errors were combined andEquation 9 was fit. The resulting error-type probabilitymodel coefficients are given in Table 3.
Stage 2.—Modeling the CDF curves within the errortypes began with creating separate data sets for the negativeand positive errors. The D classes in stage 1 were used here.The first class (0–1 in.) was removed because it had no treesfor the positive errors and only one tree for the negativeerrors. Within each D size class, error classes were createdto model the error CDF. Errors ranged in size from �0.80in. to 2.15 in. Error classes with a width of 0.025 in.extended from �0.90 in. to �0.05 in. for the negative errorsand from 0.05 in. to 2.25 in. for the positive errors.
Graphing the cumulative probabilities by error class foreach of the D classes indicated that the exponential forms in
Figure 4. The empirical D measurement error CDF surface.
Table 1. Mean and variance fits of D and H errors
Parameter �D �H
Observed mean 0.0901 �0.5950Fitted mean bias equation 0.00398331D � 0.00012141D2 �0.007390377Hp-Values for coefficients �0.0001 �0.0001 �0.0001Observed variance of errors 0.2237 2.7950Variance stabilizing transform �D/exp[0.1145DM] �H/[H1.1]p-Values (Brown & Forsythe) for constant
variance test, post-transformation0.0501 0.4041
Forest Science 50(6) 2004 749

Equations 2 and 3 were appropriate. The means and vari-ances of the curve forms differ across D classes, indicatingthe need for the – and � parameters to change with D.The minimum absolute error size, based on the definition ofa correct measurement, was 0.05 in., and the correctionincorporated into Equations 4 and 5 was used withmax(�x
�) � �0.05 in. and min(�x�) � 0.05 in.
Modeling began by fitting a function for the Pr(min(�x�)).
This model was done using Proc Logistic in SAS. Predictorvariables included in the model building were D, D2, D1/2,and D�1. The final model form was
Pr(min��D��) �
ea1D�a2D�1
1�ea1D�a2D�1 . (10)
All other parameters, including a constant term, were insig-nificant at the � � 0.10 level. Equation 10 was included inEquation 7 to produce the updated CDF equations withmax(�x
�) and min(�x�) as defined above,
FY���D
�� � 1 e��D��max��D
���*��D � 0, � 0
(11)
FY���D
�� � 1 �1 ea1D�a2D�1
1�ea1D�a2D�1�e���D��min��D
���*� ,
�D 0, � 0 (12)
Fitting Equations 11 and 12 for each D size class andplotting the estimates for – and � against D indicated thatthe parameters could be modeled using an exponential func-tion in both cases. The best model forms were
� � b0 � eb1D2�b2D�1for �D � 0
� � b0 � eb1D2�b2D�1for �D 0
These functions were put in place of � and � in Equa-tions 11 and 12, and the power on the error variable wasallowed to vary, producing the final CDF equation forms
FY���D
�� � 1 e���D����0.05��c1�b0eb1D2�b2D�1) for �D 0 (13)
FY���D
�� � 1 �1 ea1D�a2D�1
1�ea1D�a2D�1� e���D���0.05))c1�b0eb1D2�b2D�1�
for �D 0 (14)
The parameters of Equations 13 and 14 were fit in SASusing Proc NLIN, and the resulting estimates are given inTable 4. Starting values for this fit came from prior fits of�, �, and Pr(min(�D
�)). The starting value for the c1
parameter was 1.0 in each equation. Combining the fittederror-type probabilities from stage 1 with these modelsaccording to Equation 8 produced the fitted CDF surface inFigure 6.
No statistical test exists for comparing the predictiveability of CDF surfaces. As a result, the TSED fitted surfacewas compared with the different normal distributions bycalculating the sum of squared differences between the eightfitted surfaces and the actual surface for all 2,175 observa-tions in the data set (Table 5).
H AnalysisThe height (H) error data set contained 722 negative
errors, 486 positive errors, and 30 errors with a value of zerounder our error definition. Contrary to the D example, the Happlication example evaluates the capability of the TSEDand the normal distributions at characterizing the distribu-tion of ME with a small percentage of zero errors. Theactual �H CDF surface, Figure 7, indicates that a distributionwith nonconstant �(�H) and nonconstant �(�H) is appropri-ate for modeling �H.
Traditional Distribution ModelingDetails of fits for �(�H) and �(�H) are found in Table 1.
Analogs to the six normal distributions in the D analysis
Table 2. Means and standard deviations for the six D ME normal distributions and the six H ME normal distributions
Alternativedistribution
D H
�D (in.) �D (in.) �H (ft) �H (ft)
Normal 1 0 0.2237 0 2.7950Normal 2 0.0901 0.2237 �0.5950 2.7950Normal 3 0.00398331D
�0.00012141D20.2237 �0.007390377H 2.7950
Normal 4 0 0.03877408 exp[0.1145D] 0 0.02015762H1.1
Normal 5 0.0901 0.03877408 exp[0.1145D] �0.5950 0.02015762H1.1
Normal 6 0.00398331D�0.00012141D2
0.03877408 exp[0.1145D] �0.007390377H 0.02015762H1.1
Figure 5. D CDF surface plot of Normal 6 (nonconstant mean,nonconstant variance).
750 Forest Science 50(6) 2004

were also created in this analysis based on these estimates of�(�H) and �(�H), and are summarized in Table 2.
TSED Distribution ModelingStage 1.—As with the D errors, the H error-type prob-
abilities were not constant and, therefore, multinomialregression in S-Plus was used to model them. Trees lessthan 130.1 ft in height were grouped into 5-ft classes.Trees greater than 130.0 ft and less than 200.1 ft weregrouped into 10-ft classes because of the smaller numberof trees in this range. The remaining trees with heightsgreater than 200.0 ft, ranging from 204.2 to 231.7 ft andhaving a mean of approximately 220.0 ft, were groupedinto one class and assigned a value of 220.0 ft. No treeswere present in the 2.5-ft class (0 –5 ft) and only one treewas present in the 7.5-ft class. Both classes were there-fore removed. All remaining classes contained at least 10trees.
Equation 1 was fit with g2 and g3 being linear functions
of H, H2, H1/2, and H–1. Fitting was done in the samemanner as described for the D error analysis. The H2, H1/2,and H–1 terms were not significant and were removed.Fitted models were again tested for overdispersion. Theoverdispersion parameter was estimated to be 1.0142 with a95% confidence interval of (0.6066, 1.31180), indicating alack of extra-multinomial variation. Fitting the final modelwithout quasilikelihood resulted in the parameter estimatesin Table 6. Both g2 and g3 are significantly different fromzero, and the models cannot be simplified as was done in theD analysis.
Stage 2.—Separate data sets were created for the posi-tive and negative H errors. The H classes used in stage 1were also used in this stage. Error values ranged from�12.1 to 14.0 ft. Error classes of width 0.2 ft were createdin each H class extending from �12.2 to �0.1 ft for thenegative errors and from 0.1 to 14.2 ft for the positiveerrors. Graphing the cumulative probabilities by error classfor each of the H classes indicated that the general expo-nential forms in Equations 2 and 3 were appropriate formodeling FY
�(�H�) and FY
�(�H�) with – and � changing
over H.HM and HT were measured to the nearest 0.1 ft. The
values of max(�H�) and min(�H
�) were therefore �0.1 and0.1ft, respectively. Equation 6 was fit for the Pr(min(�H
�))using Proc Logistic in SAS. Predictor variables included inthe original model were H, H2, H1/2, and H–1. The finalmodel form is
Pr(min(�H�)) �
ea0�a1H�a2H0.5
1�ea0�a1H�a2H0.5 .
Equations 5 and 7 with max(�H�), min(�H
�), and Pr(min(�H�))
as defined above becomes
FY���H
�� � 1 e��H��max��H
������H
� 0, � � 0 (15)
Table 3. Fitted multinomial regression coefficients for the reduced D error type probability models.
Function Variable Coefficient Standard error p-Value*
g2 Intercept �2.58503924 0.637901559 0.0004D �0.32173674 0.099804471 0.0033
D1/2 1.87615818 0.489346805 0.0007D2 0.00280732 0.001048412 0.0125
* Based on 27 degrees of freedom.
Table 4. Fitted nonlinear regression coefficients for the modeled D ME CDF curves within the errortypes
Parameter
Negative error fit Positive error fit
Estimate Standard error Estimate Standard error
a1 — — 0.10842178 0.00394588a2 — — �3.53708466 0.28698672b0 0.01215524 0.00115901 12.41092908 0.61720091b1 0.00091755 0.00004805 �0.04861734 0.00110454b2 �1.95002800 0.30062975 3.47824077 0.43714443c1 �1.27338986 0.03135226 1.07090649 0.01253076MSE 0.00822 0.00190Adjusted R2 0.8858 0.9486
Figure 6. Fitted TSED surface for the D errors.
Forest Science 50(6) 2004 751

FY���H
�� � 1 �1 ea0�a1H�a2H0.5
1 � ea0�a1H�a2H0.5�e���H��min��H
�����
�H� � 0, � � 0 �16�
Fitting these two equations by H class and plotting theresulting estimates for – and � against H class showedthat both – and � could be modeled using an exponentialfunction in both cases:
� � b0 � eb1H�b2H�1�b3H�2) for �H 0
� � b0 � eb1H�b2H�1for �H 0
These functions were put in place of � and � in Equa-tions 15 and 16 and the power on the error variable wasallowed to vary:
FY���H
�) � 1 e��H����0.1��c1�b0eb1H�b2H�1�b3H�2� for �H 0
FY���H
�� � 1 �1 ea0�a1H�a2H0.5
1 � ea0�a1H�a2H0.5�e���H��0.1�c1�b0eb1H�b2H�1�
for �H � 0
Fitting these equations was done with Proc NLIN in SAS.The resulting parameter estimates are given in Table 7.Starting values for this fit came from prior fits of �, �,
and Pr(min(�H�)). The starting value for the c1 parameter
was 1.0 in both equations. Combining the fitted error-typeprobabilities from stage 1 with these models according toEquation 8 produced the fitted surface in Figure 8. TheTSED fitted surface was compared with the different nor-mal distributions in the same manner as in the D example.Sums of squared differences for the comparisons are givenin Table 5.
Discussion
Comparing the performance of the TSED method to thenormal fits for the D example indicates that the TSEDmethod provides a much better approximation to the actualerror distribution than does any of the six normal distribu-tions examined, explaining 13% more of the variation in thebase fit than the best normal distribution (Table 5). Thisimproved performance results from the TSED characteriza-tion of the vertical section of the distribution at zero. Ap-proximately 17% of the D errors are zero, with the percent-age being very high for small trees. Examining the differ-ences between the normal surfaces and the empirical surfaceindicates that the region around zero is the primary reasonwhy the sum of squared differences is higher and the per-cent reduction in the base fit sum of squared differences islower for these fits compared with the TSED fit. In the Hexample, the fit statistics for the normal distributions arevastly improved. Fewer than 2.5% of the H errors are zero.Consequently, the normal surfaces are able to approximatethe empirical surface much more closely. Normal 6, the bestfit of the six normal distributions, characterizes the H errorCDF surface and the TSED method, leading to a 94.3%reduction in the base fit sum of squared differences com-pared to a 94.2% reduction for the TSED fit (Table 5).
Comparing the sums of squared differences for the dif-ferent normal fits to each other for the application examplesreveals several interesting results. In the D example, Normal2 and Normal 5 produce much poorer error distributioncharacterizations than do the other normal distributions,explaining 74.9 and 45.3% of the base fit sum of squareddifferences, respectively (Table 5). These two fits assume�(�D) to be a constant other than zero (Table 2). For smallD classes, mean errors are very close to zero, and the CDFis nearly vertical, resulting from a small standard deviation.
Table 5. Sums of squared differences between fitted D and H ME CDF surfaces and their respectiveempirical surfaces, with the percent reduction in the base fit sum of squared differences offered byeach model
Distribution
D H
Sums of squareddifferences % Reduction
Sums of squareddifferences % Reduction
Base fit 244.8921 0.0 127.1764 0.0TSED 4.6392 98.1 7.3767 94.2Normal 1 41.1679 83.2 26.6320 79.1Normal 2 61.5424 74.9 19.4876 84.7Normal 3 39.1445 84.0 19.2318 84.9Normal 4 40.5096 83.5 17.7715 86.0Normal 5 134.0695 45.3 12.1585 90.4Normal 6 36.1398 85.2 7.2584 94.3
Figure 7. The empirical H measurement error CDF surface.
752 Forest Science 50(6) 2004

The steepness of the fitted and empirical surfaces, combinedwith the differences in their means, lead to large verticaldifferences between them for these size classes, causing thesum of squared differences to be large. The other fournormal surfaces do not have this problem. In the case ofNormal 1 and Normal 4, the distributions are centered atzero, thereby minimizing surface differences in the nearlyvertical sections of the distributions. In the case of Normal3 and Normal 6, the distributions have variable means,allowing them also to be centered near zero for small trees.This problem for Normal 2 and Normal 5 is not seen in theH example, for which their percent reductions in the base fitsum of squared differences are 84.7 and 90.4%, respectively(Table 5). The smaller percentage of zero errors leads to asmaller vertical section in the CDF surface. Vertical differ-
ences between the normal surfaces and the empirical surfaceare reduced as a result.
The benefits resulting from including more detailed in-formation about the error distributions are not the same forthe D and H examples. In the D example (Table 5), allowing�(�D) to vary leads to a 0.8% improvement in explainingthe base fit sum of squared differences over the �(�D) � 0fit when �(�D) is held constant (Normal 3 versus Normal 1)and a 1.7% improvement when �(�D) is allowed to vary(Normal 6 versus Normal 4). The largest improvement overthe simplest case (Normal 1) comes from allowing both �and � to vary (Normal 6). However, this improvement in theexplained base fit variation is only 2.0%. The small sizes ofthe improvements are due to the inability of any of the sixnormal distributions to characterize the vertical section ofthe empirical CDF surface. Allowing �(�H) and �(�H) tovary in the H example results in improvements of 5.6 and6.9%, respectively (Table 5). The improvement from allow-ing both to vary simultaneously, 15.2%, is larger than thesum of their individual improvements. The lower sums ofsquared differences and larger improvements from includ-ing additional information can be attributed to the morecontinuous nature of the empirical H error CDF surface.
Differences between the six normal CDFs and the em-pirical error CDF throw doubt on the validity of resultspresented in published studies for variables with a relativelylarge percentage of correct measurements. McRoberts etal.’s (1994) study is the most similar to the TSED methodpresented here. Their method involved drawing a numberfrom a Uniform(0, 1) distribution to determine whether thecorresponding observation contained error. If an error waspresent, a value for the error was drawn from a heteroge-neous Normal distribution. This method has potential prob-lems, given that the probability of a zero error does not
Figure 8. Fitted TSED surface for the H errors.
Table 7. Fitted nonlinear regression coefficients for the modeled H ME CDF curves within the errortypes
Parameter
Negative error fit Positive error fit
EstimateStandard
error Estimate Standard error
a0 — — 3.31790195 0.85276164a1 — — 0.07696922 0.01740963a2 — — �0.85457141 0.24453370b0 1.43353558 0.18535801 0.49336219 0.04100471b1 0.01284910 0.00061222 �0.00575389 0.00036801b2 �88.93230138 6.46004660 44.99513555 3.01427504b3 503.24182680 46.17903859 — —c1 �1.65017572 0.03216920 1.14224207 0.02350058MSE 0.01160 0.00713Adjusted R2 0.8735 0.8771
Table 6. Fitted multinomial regression coefficients for the H error type probability models
Function Variable Coefficient Standard error p-Value*
g2 Intercept �2.20982444 0.41758552 �0.0001H �0.01375464 0.00589249 0.0231
g3 Intercept �0.57546102 0.13676892 �0.0001H 0.00221736 0.00151917 0.1498
* Based on 58 degrees of freedom.
Forest Science 50(6) 2004 753

change as tree size changes, and with the assumption of nobias in the errors. Based on the comparison above, allowingfor changing error-type probabilities and including a biascorrection within the normal distribution may have a sig-nificant impact on the ability to characterize the error dis-tribution accurately and precisely.
Several of the studies mentioned previously used errorsdrawn randomly from an assumed distribution to betterunderstand their effect on a model or system of models. Thistype of analysis is also possible with the TSED distributionmodel. Errors may easily be drawn randomly from theappropriate CDF curve in the fitted surface corresponding tothe desired D or H. This may be done by drawing a randomnumber, p, from a Uniform(0, 1) distribution, treating p as acumulative probability from the CDF, and using the in-verted form of the distribution to determine the error sizethat corresponds to a cumulative probability of p. A tree sizeis required first to specify the CDF curve in the surface fromwhich the error is to be drawn. Once this is determined anda random number is drawn, the next step in this process isto calculate the error-type probabilities. If the random num-ber is less than the probability of a negative error, then theinverted form of the negative error CDF portion of the curveis used. If the random number is greater than the probabilityof a negative error, but less than the probability of a nega-tive error plus the probability of a zero error, the error isthen assigned a value of zero. Otherwise, the inverted formof the positive error portion of the curve is used. Forexample, the inverted forms for �D based on the form of theoverall CDF in Equation 8 are as follows:
For a random number p � Pr(�D�), inverting Equation 13
gives
error �c1� ln�p/Pr��D
���
b0 � exp�b1 � D2 � b2 � D�1 � max(�D
�)
For a random number p for which Pr(�D�) � p � Pr(�D
�)� Pr(�D
0 ):
error � 0
For a random number p Pr(�D�) � Pr(�D
0 ), invertingEquation 14 gives
error �
c1� ln�p Pr��D�� Pr��D
0 �
Pr��D�� �1�
exp[�(a1�D�a2�D�1)]
1� exp[��a1�D � a2�D�1)]�b0 � exp�b1 � D2 � b2 � D�1
� min��D�� �17�
The coefficients for these equations are the same as thoseproduced in the model fitting described above for Equations13 and 14. The same procedure can be used to draw valuesof �H, with the component �H equations substituted in theappropriate places.
The level of precision used in taking measurements hasan effect on the ability of different CDF models to charac-
terize the MEs. Had the D measurements been taken to thenearest inch, the number of correct measurements wouldhave increased to 1,087 out of 2,175. If the H measurementshad been made to the nearest foot, the number of correctmeasurements would have increased from 30 to 274 out of1,238. In both cases, the need for a nonstandard distributionthat can characterize the vertical section of the CDF surfaceat zero would have been greater. It must be remembered thatthe objective of measurement technology and quality con-trol techniques is to increase the Pr(�x
0). For example, use ofthe currently available laser technology to measure HM,instead of the techniques used in this study, would probablyhave increased the Pr(�H
0 ) and, therefore, the length of thevertical segment of the CDF surface of �H.
Even with a small vertical section at zero, the TSEDmethod may provide a better fit for many ME distributionsbecause of its ability to characterize an asymmetric distri-bution. For example, the distribution of �D was very asym-metric, with errors ranging from �0.80 to 2.15 in. As aresult, TSED is recommended for modeling error distribu-tions that are suspected of either being asymmetric, havinglarge proportions of zero errors, or both.
As evidenced by its ability to characterize the verticalsection of the ME CDF at zero and allow for asymmetrictails in the distribution, the TSED method provides a richerdescription of the errors than do traditional methods. This isfurther seen in examining the results of the first stage of thefitting process. The first stage provides a description of theway in which the error-type probabilities change with xM. Ifa library of information from this stage were put together fordifferent measurement techniques of the same variable,decisions regarding which technique to use in certain situ-ations could be made. For example, when faced with choos-ing between two measurement techniques with error-typeprobabilities as shown in Figure 2, a and c, the decision ofwhich technique to use could be made based on the size ofthe trees to be measured. If the trees are generally small,then the technique represented by Figure 2c could be usedbecause of the higher proportion of correct measurements. Ifthe trees are large, however, this technique results in fewercorrect measurements than that represented by Figure 2a.Because both techniques are unbiased, the normal distribu-tion would not differentiate between them with regard toaccuracy, and therefore would not be helpful in determiningwhich technique to use. In addition to being germane to thecharacterization of these types of mensuration error, theTSED method may be useful for characterizing the distri-butions of grouping or sampling errors as well.
It is important to also note that species differ in boleshape at breast height and in crown shape and density. As aresult, species may differ in the forms of their error distri-butions for D and H. What is presented here is intended asa demonstration of the proposed error-evaluation technique.The errors were combined across six conifer species to geta more complete description of the error distribution withineach D or H class and to better illustrate the method pro-posed here. Further application of the TSED method may be
754 Forest Science 50(6) 2004

most appropriate with models calibrated by species or spe-cies group, and for groups with similar stem-formcharacteristics.
More detailed TSED characterization of the distributionof MEs requires the estimation of substantially more pa-rameters than any of the normal distribution formulations.For example, TSED required 14 and 16 parameters to esti-mate the CDFs of D and H, respectively, whereas Normal 6required only 4 and 2, respectively. This requirement, com-bined with the proposed method used to identify and char-acterize each component of TSED, dictates the need for alarge data set of MEs to fit a TSED model. These MEs mustalso cover as full a range of x and �x as possible.
This study would be improved by a rigorous statisticaltest comparing CDF surfaces for significant differences.The Kolmogorov test exists for comparing CDF curves, butno analog for comparing surfaces exists. Application ofsuch an analog or an entirely new test would indicate thesignificance of the improvement offered by the TSEDmethod over different assumed Normal distributions,thereby providing a measure of the importance of charac-terizing the vertical section that appears when a consider-able portion of the measurements are done correctly.
Conclusion
The presence of ME in measured data is unavoidable andmay lead to biased and imprecise estimates of stand and treeattributes and biased and imprecise model-parameter esti-mates and predictions. Correction methods have been de-veloped that use the distribution of the ME to counter theireffects. Until now, this has been done under the assumptionthat the errors are Normal in distribution. This study dem-onstrates that this assumption can be incorrect in somecases, and a new method for modeling the error distributionis given. This new distribution allows for more flexibleerror-distribution shapes, and a comparison with differentNormal distributions shows that it does as well in somecases and better in others at characterizing the error distri-bution. Its greater flexibility and performance in compari-sons here suggest that the TSED method should be used formodeling error distributions in the future.
Endnotes[1] The data sets used in this application contain measurements made in
inches (D) (1 in. � 2.54 cm) and feet (H) (1 ft � 0.3048 m). To notconfound the measurement-error issue with approximate unit conver-sions, English units are used throughout.
Literature Cited
CANAVAN, S.J. 2002. The process and characterization of mea-surement error in forestry. PhD dissertation. Oregon StateUniversity, Corvallis, OR. 160 p.
CARROLL, R.J., D. RUPPERT, AND L.A. STEFANSKI. 1995. Measure-ment error in nonlinear models. P. 22 in Monographs onstatistics and applied probability 63. Chapman & Hall, London,United Kingdom.
COCHRAN, W.G. 1952. The �2 test of goodness of fit. Ann. Math.Stat. 23:315–345.
CONOVER, W.J. 1971. Practical nonparametric statistics. JohnWiley & Sons, New York. 462 p.
EMMINGHAM, W.H.1977. Comparison of selected Douglas-fir seedsources for cambial and leader growth patterns in four westernOregon environments. Can. J. For. Res. 7:154–164.
FULLER, W. 1987. Measurement error models. John Wiley & Sons,New York. 440 p.
GARCIA, O. 1984. New class of growth models for even-agedstands: Pinus radiata in Golden Downs Forest. N. Z. J. For.Sci. 14:65–88.
GERTNER, G.Z. 1984. Control of sampling error and measurementerror in a horizontal point cruise. Can. J. For. Res. 14:40–43.
GERTNER, G.Z. 1986. Postcalibration sensitivity procedure forregressor variable errors. Can. J. For. Res. 16:1120–1123.
GERTNER, G.Z. 1991. Prediction bias and response surface curva-ture. For. Sci. 37:755–765.
GERTNER, G.Z., AND P.J. DZIALOWY. 1984. Effects of measure-ment errors on an individual tree-based growth projection sys-tem. Can. J. For. Res. 14:311–316.
GREGOIRE, T.G., S.M. ZEDAKER, AND N.S. NICHOLAS. 1990. Mod-eling relative error in stem basal area estimates. Can. J. For.Res. 20:496–502.
HAMILTON, D.A., AND J.E. BRICKELL. 1983. Modeling methods fora two-state system with continuous responses. Can. J. For. Res.13:1117–1121.
HANN, D.W., AND A.A. ZUMRAWI. 1991. Growth model predic-tions as affected by alternative sampling-unit designs. For. Sci.37:1641–1655.
HANUS, M.L., D.W. HANN, AND D.D. MARSHALL. 2000. Predictingheight to crown base for undamaged and damaged trees insouthwest Oregon. Res. Contr. 29. For. Res. Lab., Oregon StateUniv., Corvallis, OR. 35 p.
HASENAUER, H., AND R.A. MONSERUD. 1997. Biased predictionsfor tree height increment models developed from smoothed“data”. Ecol. Model. 98:13–22.
JAAKKOLA, S. 1967. On the use of variable size plots for incrementresearch. P. 371–378 in Proc. 14th World Congress of theInternational Union of Forestry Research Organizations. Sect.25. DVFFA, Munich, Germany.
JABLANCZY, A. 1971. Changes due to age in apical development inspruce and fir. Can. For. Serv. Res. Note 27(2):10.
KANGAS, A.S. 1996. On the bias and variance in tree volumepredictions due to model and measurement errors. Scand. J.For. Res. 11:281–290.
KANGAS, A.S. 1998. Effect of errors-in-variables on coefficients ofa growth model and on prediction of growth. For. Ecol. Man-age. 102:203–212.
KANGAS, A.S., AND J. KANGAS. 1999. Optimization bias in forestmanagement planning solutions due to errors in forest vari-ables. Silva Fennica 33(4):303–315.
KMENTA, J. 1997. Elements of econometrics. 2nd Ed. Univ. ofMichigan Press, Ann Arbor, MI. 786 p.
Forest Science 50(6) 2004 755

KOZAK, A. 1998. Effects of upper stem measurements on thepredictive ability of a variable-exponent taper equation. Can. J.For. Res. 28:1078–1083.
KULOW, D.L. 1966. Comparison of forest sampling designs. J. For.64:469–474.
LARSEN, D.R., D.W. HANN, AND S.C. STEARNS-SMITH. 1987.Accuracy and precision of the tangent method of measuringtree height. West. J. Appl. For. 2:26–28.
MCCULLAGH, P. AND J.A. NELDER. 1995. Generalized linear mod-els. Monographs on statistics and applied probability 37. Chap-man & Hall. London. 511 p.
MCROBERTS, R.E., J.T. HAHN, G.J. HEFTY, AND J.R. VAN CLEVE.1994. Variation in forest inventory field measurements. Can. J.For. Res. 24:1766–1770.
NESTER, M.R. 1981. Assessment and measurement errors in slashpine research plots. Australia, Queensland Dept. For. Tech.Rep. 26. 10 p.
NIGH, G.D., AND B.A. LOVE. 1999. How well can we selectundamaged site trees for estimating site index? Can. J. For.Res. 29:1989–1992.
PAIVINEN, R., AND H. YLI-KOJOLA. 1989. Permanent sample plotsin large-area forest inventory. Silva Fennica 23(3):243–252.
PHILLIPS, D.L., S.L. BROWN, P.E. SCHROEDER, AND R.A. BIRDSEY.2000. Toward error analysis of large-scale forest carbon bud-gets. Global Ecol. Biogeogr. 9(4):305–313.
REICH, R.M., AND L.G. ARVANITIS. 1992. Sampling unit, spatial
distribution of trees, and precision. North. J. Appl. For.9(1):3–6.
RITCHIE, M.W. 1997. Minimizing the rounding error from pointsample estimates of tree frequencies. West. J. Appl. For.12(4):108–114.
SCHAFER, D.W. 1998. Unpublished course notes. Oregon StateUniversity, Corvallis, OR.
SMITH, J.H.G. 1975. Use of small plots can overestimate upperlimits to basal area and biomass. Can. J. For. Res. 5:503–505.
SMITH, J.L. 1986. Evaluation of the effects of photo measurementerrors on predictions of stand volume from aerial photography.Photogram. Eng. Remote Sens. 52(3):401–410.
SMITH, J.L., AND H.E. BURKHART. 1984. A simulation study as-sessing the effect of sampling for predictor variable values onestimates of yield. Can. J. For. Res. 14:326–330.
STAGE, A.R. AND W.R. WYKOFF. 1998. Adapting distance-inde-pendent forest growth models to represent spatial variability:Effects of sampling design on model coefficients. For. Sci.44:224–238.
SWINDEL, B.F., AND D.R. BOWER. 1972. Rounding errors in thepredictor variables in a general linear model. Technometrics14(1):215–218.
WALLACH, D., AND M. GENARD. 1998. Effect of uncertainty ininput and parameter values on model prediction error. Ecol.Model. 105:337–346.
WILLIAMS, M.S., AND H.T. SCHREUDER. 2000. Guidelines forchoosing volume equations in the presence of measurementerror in height. Can. J. For. Res. 30:306–310.
756 Forest Science 50(6) 2004