Embed Size (px)
Citation preview

The Sensor Networking with Delay Tolerance project (SeNDT) project
AnLTP implementation
http://down.dsg.cs.tcd.ie/sendt/
Stephen [email protected]
March 2005 IETF

The problem
● Lake water quality monitoring● Aiming for a bunch of cheap-ish (~€1000)
sensors (10's) in a lake– Which can last a winter with little servicing
● Custom I/O board + off-the-shelf components● Using the data-mule approach
– Fishing, tour-boats, passing traffic● Using LTP for comms
– sensor<->sensor – sensor<->mule

SeNDT LTP implementation
● Called “perfume”● Currently implements -01 version of draft
without green-part support– Will update to -02 draft real soon now
● Provides a sockets API – Userland not kernel
● Cues via whos_listening() and whos_talking() SPIs – SPI implementation based on SeNDT schedules
● XML for schedule calculation

Mules● In sensor networking a mule is a special
node that wanders through the sensor field and picks up packets for further routing– Idea is that mules allow for much sparser
networks● Mules are very, very like DSN Earthstations
– Wandering amongst different clusters of sensor node is very like the Earth turning to make the 70m Goldstone antenna face Mars!

Mules follow Trajectories● Each consists of a sequence of waypoints● Each waypoint has the following attributes
– Position ● Terrestrial cases are lat/long
– no altitude as yet
– Arrival time– Pause time– Next move type (hop or slide)
● Whether node's radio is on or off as it transits to the next waypoint

Probabilistic Trajectories● We associate a probability with each path
– Instead of a sequence of waypoints, at each step we have a set of possible next waypoints, each with a certain probability
– Overall we get a weighted tree of waypoints with probabilities as weights
● Many nodes are stationary which makes the calculation a bit more efficient – Though we use the same code, i.e. even fixed
positions are regarded as probabilistic trajectories
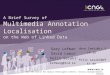
● Mules follow probabilistic trajectories through a field of nodes

Lake Nodes and Mules

Visibility -> Comms. Schedule● Various algorithms possible
– Minimal: Attempt to ensure that each node gets a chance to talk to at least one mule during a given schedule period
– Filled: As above but iterate to try to “fill-in” all gaps until no change or configured limit reached (this is the default)
– Could envisage others too, e.g. ● Giving configured weights to nodes, or more
interestingly basing such weights on actual measured network stats
● Various random schemes

Comms. Schedule -> Schedule● There are other things to schedule as well:
– Sensing events (on, off, report...)– System events and settings
● Used to (re-)configure node ● Configured sleep events
● Two formats for schedules:– Binary-kludge run-time format
● No xml parsing on embedded system● There's an API and test tool
– XML format for scheduling-time tools● All my schema stuff *.xsd, samples are at:
– http://down.dsg.cs.tcd.ie/schemas/ ● CLI for translation to Binary-kludge

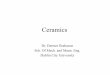
XML schedules
Kludgey binary
perfume_main(daemon)
schedule.xmlfield.xml
LTP segs. LTP segs.
Scheduling Time
Run Time
Edit
perfume_xmlsched(cli)
Schemas, samples at: http://down.dsg.cs.tcd.ie/schemas/

Conclusion
● LTP is useful for terrestrial applications– Also looking at other environmental monitoring
applications for the sensor nodes● Noise/Quiet
● Easy enough to implement● Looking for funding for a real pilot
– Have a lake already!● Planning to make LTP code public
– When/if stable and have support resources