Embed Size (px)
Citation preview

devices the obvious choicefor 3D applications.In reality,however, the mousecontinuesto be the dominant inputdevice in the world of 3D graphics.
A key contributing factorto themouse’spreeminenceis thatmostusersof 3D graphicsapplicationsdo not work exclu-sively in 3D; rather, in a typical scenarioa useris likely tofrequentlyswitchbetween2D and3D applications.In addi-tion, even 3D applicationsusually require a substantialamountof 2D interaction− manipulating3D objectsin 2Dviews aswell astheusual2D tasksof selectingitemsfrommenus,typing text, etc. While the mouseis indisputablyagooddevice for 2D interaction,it performsonly adequatelyin 3D tasks.Practicallyall existing 3D devices, however,performpoorly in 2D taskswhencomparedto the mouse.Therefore,it comesasno surprisethatuserspick themouseastheir all-purposeinput device. They areclearly preparedto sacrificepeak3D performanceto avoid having to con-stantlyswitchbetweenthemouseanda device bettersuitedto 3D interaction.This leadsus to the obvious conclusionthatwhat is neededis aninput device thatperformsreason-ably well forboth 2D and 3D tasks.
In this paper, we first explore the propertiesof the mousethat make it so successful.We thendescribea new device,the Rockin’Mouse (Figure 1), which incorporatesthesepropertieswhile providing simultaneouscontrol over fourdegreesof freedom.Finally, we presentthe resultsof anexperiment to investigate the performance of theRockin’Mousevs. the mousein a typical 3D interactiontask.
The Roc kin’Mouse: Integral 3D Manipulation on a Plane
Ravin Balakrishnan1,2, Thomas Baudel2, Gordon Kurtenbach2, George Fitzmaurice2
1Dept. of Computer Science 2Alias|WavefrontUniversity of Toronto 110 Richmond Street East
Toronto, Ontario Toronto, OntarioCanada M5S 1A1 Canada M5C 1P1
[email protected] {ravin | tbaudel | gordo | gf}@aw.sgi.com
ABSTRACTA novel input device calledtheRockin’Mouseis describedandevaluated.The Rockin’Mouseis a four degree-of-free-dominputdevicethathasthesameshapeasaregularmouseexcept that the bottomof the Rockin’Mouseis roundedsothat it canbe tilted. This tilting canbe usedto control twoextradegreesof freedom,thusmakingit suitablefor manip-ulation in 3D environments.Like the regular mouse,theRockin’Mousecansenseplanarpositionandperformall theusual functions.However, in a 3D scenea regular mousecan only operateon 2 dimensionsat a time and thereforemanipulation in 3D requires a way to switch betweendimensions. With the Rockin’Mouse, however, all thedimensionscanbe simultaneouslycontrolled.In this paperwe describeour designrationalebehindtheRockin’Mouse,and present an experiment which compares theRockin’Mouseto thestandardmousein a typical 3D inter-action task.Our resultsindicatethat the Rockin’Mouseis30% fasterand is a promisingdevice for both 2D and3Dinteraction.
Keywords3D interaction,input devices, integral motion, mouse,3Dgraphical manipulators.
INTRODUCTIONTheever increasingspeedof computersin recentyearshasled to the proliferationof tools for creatingandmanipulat-ing 3D graphics.While thevisualsproducedby state-of-the-art 3D graphicssystemsareof very high quality, interactiontechniquesfor manipulationwithin thesesystemsoftensuf-fer from thelimitationsof currentlyavailableinputdevices.
Theseinteractiontechniquescanbe broadlyclassifiedintotwo categories:thosebasedonthreeor moredegree-of-free-dom input devices [7, 11, 12, 16, 19, 21, 22], and thosewhich rely on the ubiquitousmousecoupledwith a varietyof schemesfor mapping2D input to 3D control [3, 5, 6, 8,15, 18]. At first glance,it would seemthat the increasedsenseof directnessusuallyaffordedby thetechniquesin thefirst category wouldmake multiple degree-of-freedominput
Published in Proceedings of 1997 ACMConference on Human Factors in Com-puting Systems (CHI’97), pp 311-318. Figure 1. The Rockin’Mouse

DESIGNING AN EFFECTIVE INPUT DEVICEDesignersof new input devicesoften evaluatethembasedon criteria suchastaskcompletiontimesfor pointing to ormanipulatingon-screenwidgets.While this styleof evalua-tion is certainlyvalid, it is incomplete.Therearea hostofotherpropertiesandissuesatplay thatdeterminewhetherornot a device will be successful and widely adopted.
What’s So Great About the Mouse?In trying to understandwhy the mousehasenjoyed quite abit of successover thepasttwo decadesor so,we foundthat− apartfrom the conveniencefactordiscussedin the intro-duction − it has many subtle redeemingpropertiesthatshouldbe taken into accountwhen designinga new inputdevice:
Form FactorThephysicalform of themouse,coupledwith thefactthatitoperateson a flat horizontalsurface,ensuresthat theuserisnot restrictedto any particulargrip. Themousecanbeusedin a variety of ways − ranging from a precisiongrip foraccuratemovements,to “lazy” or “relaxed” gripswhensim-ply moving the cursorfrom one window to another. Also,the user’s arm is generallyrestingon a tablewhile movingthe mouse.This is lessfatiguing when comparedto using3D deviceslike theBat [21], Polhemus3Ball [16], andLog-itech3D/6D [12] mouse,all of which requiretheuser’s armto be suspended in 3D space.
StabilitySincethemouseis fairly heavy andhasa largeareain con-tactwith thesurfaceit moveson, tremorin a user’s handisdampened,allowing for precision operation.In contrast,free-floating3D devices[12, 16, 21] andstylus’ on digitiz-ing tablets[20] tendto transmit,andin somecasesamplify,human hand tremor.
Also, themouseis usuallyin a stablestatewhereit is readyto beusedanddoesnot have to be“disturbed”to acquireorreleasethe device. The position of stylus and 3D devices,however, will bedisturbedwhena userpicksup thedeviceup or puts it down.
Relative vs. Absolute ModeInputdevicescaneitherreporttheirabsolutemeasuredposi-tion or theircurrentpositionrelative to somekey point (usu-ally the point when the device wasengaged).Becausethemouse is a relative device with implicit clutching, theamountof arm movementrequiredto effectively useit canbe very small.Thus,the userneednot expendmucheffortwhenworking with the mouse.Further, relative devicesdonot suffer from the “nulling problem” [1] associatedwithabsolute ones.
The implicit clutching mechanism− lifting the mouseoffand replacingit on the work-surfaceto engageand disen-gageit − is easilyunderstoodandexecuted.It is alsoflexibleandcomfortablewhencomparedto usinganexplicit clutchbutton like that found on other devices [12, 16, 21].
Order of ControlZhai [23] has shown that for common3D taskssuch asobject manipulation, position control input devices are
superiorto rate control devices. In the 2D world, positioncontrolis critical for pointingtasks.It alsoallowsfor revers-ible actions:for example,adesignerusingapositioncontroldevice to manipulatethe cameraview in a 3D modelingapplicationcan“spin theworld around”to geta quick lookof the model from a differentviewpoint andthenreturntothe original view and continueworking, all within a splitsecond.This typeof action,performedmany timesa daybyusersof such applications,is practically impossiblewithforce sensing rate control devices like the Magellan [11].
We notethat sometaskssuchasnavigation in large scenesaremoresuitedto ratecontrol.However, themousecaneas-ily be usedas a rate control device by employing a firstordertransferfunction.Theconverseis not true:forcesens-ing devices cannot operate in position control mode.
Device to Cursor MappingThe default mappingof mousemotion to cursormotion is“natural” (i.e.,moving themouseforwardmovesthecursorup, moving themouseleft movesthecursorleft, etc.).Thisreducesthe cognitive load imposedon the user since themappingis simple.Most position control 3D devices [12,16, 21] have this feature,while force sensingdevices [11]often use more complicated device to cursor mappings.
Button PositionThedirectionof movementof themousebuttonsareorthog-onalto thesensingdimensionsof themouse.Thus,it is easyto operatethebuttonswithout inadvertentlymoving thecur-sor. This is onereasonwhy “3D mice” which usea thumb-wheel to control the third degreeof freedom[19] have notbeen very successful.
FamiliarityOur final point hasto do with the natureof humanbeings.We humanslike to dealwith thingswe’re familiar with, andwe areextremelyfamiliar with theform andfunctionof themouse.Indeed,an entiregenerationhasgrown up usingit.We believe that a device that radically differs from themousewill have to deliver correspondinglyhigh perfor-manceimprovementsin order to gain widespreadaccep-tance.Unfortunately, given our high level of skill with themouse,it is unlikely that any new device could facilitateperformance improvements of the required magnitude.Instead,an incrementalchangein designleadingto anevo-lution in the quality of interactionwill likely result in amore successful input device.
Where the Mouse F ailsThefactorsdescribedabove make themouseanalmostper-fect2D inputdevice.While thesefactorsareequallycriticalin 3D interaction,themousedoesnot inherentlysupport3Doperations.Over the years,several mechanismshave beendevelopedto enable3D manipulationusing only the twodegrees of freedom provided by the mouse.
The simplestmethod,from a systemsstandpoint,is to usemodifierkeys(sometimescalledhot-keys)or themousebut-tons to switch betweenmovementin the threeaxes. Thisscheme,while adequate,is ratherunnatural.First, the userhas to rememberwhich key selectsa particular axis ofmovement, and second, in what direction to move the

mouse to accomplish the desired movement.
More effective schemeswhich exploit the visual channelhave beenproposedby researchers[3, 5, 6, 8, 15, 18] andare currently implementedin several commerciallyavail-able applications.The key idea hereis that the 2D mousecursoris usedto selecta virtual “manipulator” (alsocalled“handle”, “controller”, or “3D widget”) associatedwith aparticular transformation.For example, to effect transla-tional motionalongthex-axis1, onewould selectthex-axistranslationalmanipulatorfor the desiredobjectanddrag itto the requiredlocation. Obviously, since the mousepro-videsonly two degreesof freedom,themanipulatorsgener-ally allow only transformationsalong two dimensionsat atime(thereareexceptionsto this rule:uniformscalingalongthree dimensions is an example).
Theproblemwith theseschemesis that they oftenreduceatask that would ideally be performedin a single integralmovementinto two or moresub-tasks.For instance,usingvirtual translationalmanipulatorsto move an object in 3Dspacerequiresat leasttwo motions:onemotionalongthex-y plane followed by anothermotion along the x-z plane.While the user can still perform the task, the interactiontechniquediffers from theuser’s experiencewith thephysi-cal world, thus incurring an additionalcognitive cost.Thisproblem is even more acute when the task absolutelyrequiressimultaneousmanipulationof all threedimensions:for example,specifyinga 3D motion path of an object inreal time − a task commonlyperformedin 3D animationsoftware.
Buxton [1], Cardet al. [4], andJacobet al. [9, 10] have allemphasizedthe needfor input devices to matchthe user’shigh-level conceptualmodelof thetask.Indeed,Jacobet al.[9, 10] haveshown thattasksin which theconceptualmodelof manipulation integrates all dimensions benefit from inputdeviceswhich alsosupportthis integration.They alsopointout the opposite: that multiple degree-of-freedomtaskswhere the dimensionsare conceptuallyindependent(e.g.,
adjusting object position and color) do not benefit frominput devices which integrate all dimensions.
THE ROCKIN’MOUSEThe Rockin’Mouse (Figure 1) is a new input devicedesignedto retain the characteristicsof the mousewhichmake it so successfulwhile overcomingit’s main shortfallby providing a seamlessshift into integral 3D manipulationwhen desired.
Likearegularmouse,theRockin’Mousesensesit’spositionon thesurfaceof operation.In addition,a novel curvedbasedesignallows themouseto be tilted aboutthex andz axes(Figure2). Theamountof tilt is sensedandcancontrol twoextra degrees of freedom.
While thebasecanbecurved in a varietyof ways,our pre-ferred implementationusesan asymmetriccurvatureaboutthe two axes.Thecurvatureaboutthez-axisis greaterthanthat aboutthe x-axis, resultingin a similar footprint to theregularmouse.TheRockin’Mousehasaflat spotat thecen-tre of the curved baseto make it self-rightingandimprovestability. An interestingartifact of this flat spot is that itallows the device to be physically constrainedto controlonly two degreesof freedomeven while sensingfour. Thisis often desirable when manipulating 3D objects.
The Rockin’Mouse, like the mouse,is a relative devicewhereclutching is accomplishedby lifting the mouseoffand replacing it on the work-surface.
Prototype ImplementationOurprototypeimplementation(Figures1 & 2) operatesonaWacomdigitizing tablet[20]. This tabletis ableto sensethepositionof a cordlesssensoron the x-z planeof tabletandalso the degree of tilt of the sensor about the x and z axes.
Oneof thesecordlesssensorsis mountedin thecenterof theRockin’Mouse,enabling the device’s planar and angularpositionto besensedwhenplacedon thetablet.Thecurrentresolutionof the tilt sensoris approximatelyone unit perdegree.While this is insufficient for regular use,it sufficesfor evaluatingour design.Thetabletcanalsosensethestateof Rockin’Mouse buttons connected to the sensor.
Themechanismthatenablesimplicit clutchingconsistsof a
1. Weusethefollowing conventionfor labelling3D axesin this document: “x” is the left-right axis, “y” is theup-down axis, and “z” is the near-far axis.
Figure 2. Tilting action of the Rockin’Mouse

contactswitchbetweenthecurvedbaseandtheupperbodyof themouse.Thecurvedbaseis not tightly screwed to theupper body, instead1 mm of vertical “play” enablesthecontact switch to open and close.
ApplicationIt is our belief that although the tilting action of theRockin’Mouseis not symmetricto the planarmovements,simultaneouscontrolof multiple degreesof freedomis pos-sible if appropriateinteractiontechniquesareused.This iswhatdistinguishestheRockin’Mousefrom othermicevari-ants [13, 19] which do not enableintegral action of allsenseddegreesof freedom.The ability to simultaneouslycontrol all dimensionsof an integral task shouldresult inperformanceimprovementsover the traditionalmouseandmanipulators.This advantagecouldbeutilized in numerousapplications.
In orderto investigatethesebeliefs,we conductedanexper-iment:
EXPERIMENT
Method
GoalThe primary goal of the experimentwas to evaluate theeffectivenessof the Rockin’Mousecomparedto the mousein thecontext of a 3D objectpositioningtask.We werepar-ticularly interestedin whetheror not subjectswould beableto controlmovementin all threedimensionssimultaneouslyusing the Rockin’Mouse and if this translated to animprovementin taskperformancetime.We werealsointer-estedin determiningthelearningeffectsassociatedwith theRockin’Mouse.
ApparatusThe experiment was conductedon a Silicon GraphicsIndigo2Extremeworkstationwith a 19 inch colourdisplayandstandardmechanicalmouse.The Rockin’Mouseoper-atedon a 12x12inch Wacomdigitizing tablet[20] attachedto the workstationvia a 19200bps serial connection.Theworkstationran in single-usermode,disconnectedfrom allnetwork traffic. A graphicsupdaterateof 30 hz wasmain-tained.Subjectswereseatedapproximately60 cm in frontof thedisplaywith their right handmanipulatingthemouse
or Rockin’Mouseon thedigitizing tabletplacedto therightof the display (Figure 3).
Task and StimuliThe3D objectpositioningtaskrequiredsubjectsto moveanobjectfrom onecornerof the virtual 3D sceneandplaceitinsideanotherobjectlocatedat thediagonallyoppositecor-ner.
As illustratedin Figure4, thelit sceneconsistedof two lightgrey wireframegrids drawn in the horizontalplaneat thetop and bottom of the screen.The purposeof thesegridswas to enhancethe perceptionof depthin our perspectivedisplay. The object to be manipulatedwasa gold colouredspheresurroundedby awireframeboundingbox.Thetargetobjectwasapurplecubewith translucentfaces.Coloursandtransparency effects were chosento ensurethat subjectswerenot hinderedin their taskby insufficient visual cues.Themanipulatedobjectwastwo thirdsthesizeof thetarget.
In themouseconditions,subjectsusedtheleft mousebuttonto selectoneof threetranslationalmanipulators.Clicking onthe front faceof theobject’s boundingbox selectedthex-ymanipulator while the y-z and x-z manipulators wereselectedby clicking on the left/right and top/bottomfacesrespectively. Holding the left button down andmoving themouseeffected 2D movementof the object in the activemanipulator’s plane. Therefore, a single 3D movementrequiredsubjectsto switch betweenat leasttwo manipula-tors.
In the Rockin’Mouse condition, pressingthe left buttonselectedthe entire object.Moving the Rockin’Mouseleft-right andforward-backward on the tabletcausedthe objectto move in thex-directionandz-directionrespectively. Tilt-ing the Rockin’Mouseclockwise-anticlockwisemoved theobject up-down in the y-direction. Linear control-displaymappings were used for both devices.
In both conditions,the target turnedbright greenwhentheobjectwaswithin its boundaries.Subjectsreleasedthe leftbutton while the object was within the target to indicatecompletion of a trial.
Figure 3. Experimental set-up
Figure 4. Visual Stimuli
SubjectsFourteenvolunteers(13 male,1 female)served assubjectsin this experiment.All were right handed.Threeregularlyusedthe mousewith graphicalmanipulatorsin 3D scenes,while theremainingelevenwerefamiliarwith 2D useof themouse but had limited experience with 3D environments.
Design and ProcedureA balancedwithin-subjectsrepeatedmeasuresdesignwasused.Eachsubjectwastestedwith bothdeviceson thesameday. For eachof thedevices,subjectsweregivensix blocksof trials.Eachblockconsistedof eightconditions:we testedsubject’s ability to move an object from eachof the eightcornersof the viewing volume to a target locatedat thediagonallyoppositecorner. For reasonsthat will be elabo-ratedon shortly, subjectsperformedfour trials in a row foreachcondition. All eight “direction of movement” condi-tionswerepresentedin randomorderduringtheblock.Theexperimentconsistedof 5376 trials in total, computedasfollows:
14 subjectsx2 devices per subjectx6 blocks per devicex8 conditions per blockx4 trials per condition= 5376 total trials.
Prior to performingthe experimentwith eachdevice, sub-jectswereshown how to operatethedevice andweregivenpracticetrials for eachcondition.Practicelastedaboutfif-teenminutes.For eachdevice, subjectstook betweenthirtyand forty-five minutesto performall the trials. They wereallowed to take short breaksbetweeneachcondition, butwererequiredto completeall four trials within a conditionwithout breaks.Timing beganwhentheobjectappearedonscreenand endedwhen it had successfullybeen placedinsidethe target.Therewasa 800mspausebeforethenexttrial began.Subjectswerealternatelyassignedto oneof twoexperimentalorders:Rockin’Mousefirst (R/M) or mousefirst (M/R).
A shortquestionnairedesignedto elicit subjective opinionsof thetwo devicesandassociatedinteractiontechniquewasadministered at the end of the experiment.
Pilot ResultsAn analysisof datafrom pilot testsshowedthatthetaskwasdivided into two phases:an initial open-loopor ballisticphasewhich getstheobjectin thevicinity of thetarget,fol-lowed by one or more closed-loopmovementswhich pre-ciselypositionstheobjectwithin thetarget.With themouse,theballistic phaseis usuallyperformedwith two 2D move-ments.With the Rockin’Mouse,the ballistic phasecan beaccomplishedwith a single 3D movement.However, webelieve that thecognitive loadimposedon thesubjectwhenplanningthemorecomplex 3D gestureis higherthanfor themouse’ssimpler2D movement.In otherwords,the“chunk”[2] of theproblembeingsolved is larger. Our hypothesisisthatsubjectswill eventuallybeableto performthisplanningautomatically, however, muchlearningthroughrepetitionislikely required [14].
Although we were interestedin determiningsubjects’per-formancebeforeandafterthis learningoccurred,theexperi-mentwastoo short to allow subjectsto reachexpert levelsof performance.Therefore,wedesignedacompromisesolu-tion: for eachof the eight conditions,subjectsperformedfour trials in a row. For eachtrial, the target appearedat aslightly differentpositionin thevicinity of thepertinentcor-ner for that condition. This essentiallypreventedsubjectsfrom memorizingthe exact locationof the target from trialto trial, ensuringthat the non-ballisticportion of the taskalwaysrequiredclosed-loopcontrol.For the initial ballisticphase,however, most of the planning would likely occurduring the first trial. Sincethe last threetrials requirethesameballistic movement,subjectswould not have to planthemovementagain.Thus,performancein thelastthreetri-alswould closelyapproximatehow subjectswould performafter substantial learning.
Results and Discussion
Task Completion Time
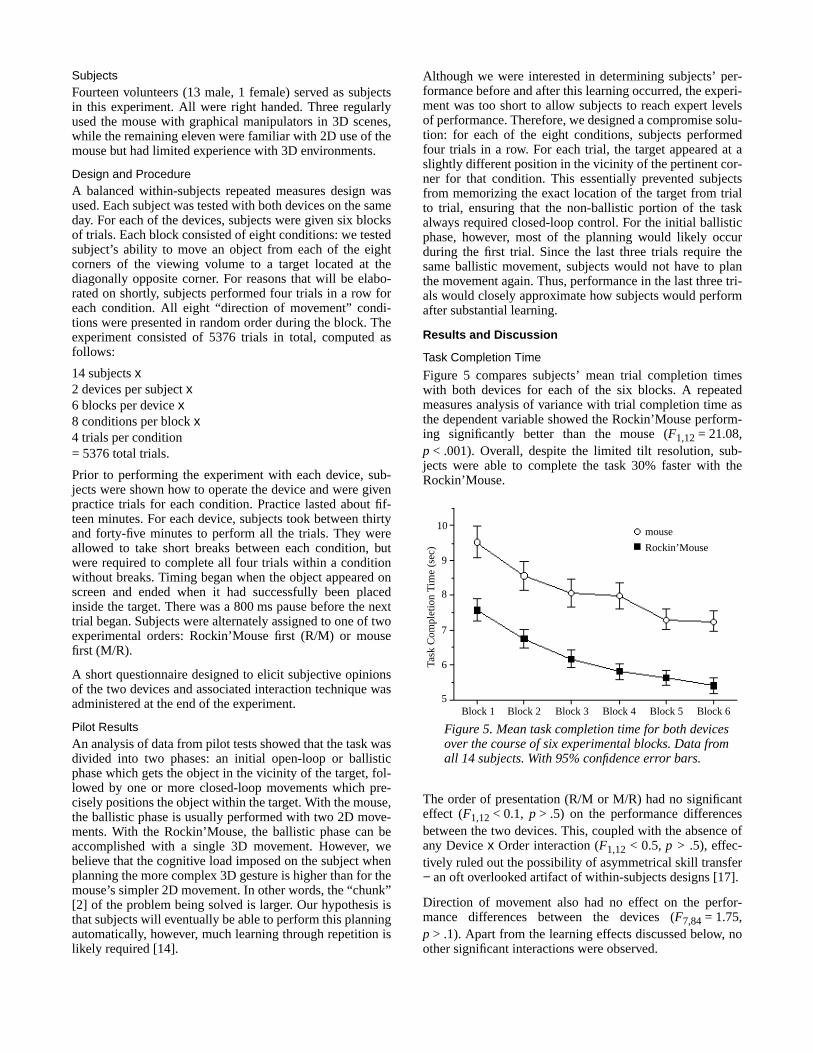
Figure 5 comparessubjects’meantrial completiontimeswith both devices for eachof the six blocks. A repeatedmeasuresanalysisof variancewith trial completiontime asthedependentvariableshowedtheRockin’Mouseperform-ing significantly better than the mouse (F1,12= 21.08,p < .001). Overall, despitethe limited tilt resolution,sub-jects were able to completethe task 30% fasterwith theRockin’Mouse.
The orderof presentation(R/M or M/R) hadno significanteffect (F1,12< 0.1, p > .5) on the performancedifferencesbetweenthetwo devices.This, coupledwith theabsenceofany Device x Orderinteraction(F1,12 < 0.5, p > .5), effec-tively ruledout thepossibilityof asymmetricalskill transfer− an oft overlooked artifact of within-subjects designs [17].
Direction of movementalso had no effect on the perfor-mance differences between the devices (F7,84= 1.75,p > .1). Apart from the learningeffectsdiscussedbelow, noother significant interactions were observed.
mouse
Rockin’Mouse
Block 1 Block 2 Block 3 Block 4 Block 5 Block 65
6
7
8
9
10
Task
Com
plet
ion
Time
(sec
)
Figure 5. Meantaskcompletiontimefor bothdevicesover thecourseof six experimentalblocks.Data fromall 14 subjects. With 95% confidence error bars.
LearningAs apparentfrom Figure5, subjects’performancewith bothdevices improved over the course of the experimentalblocks (F5,60= 23.01, p < .0001). Also, the performancedifferencesbetweenthe two devices were independentofblock, asshown by the lack of a significantDevice x Blockinteraction (F5,60< 1, p > .5).
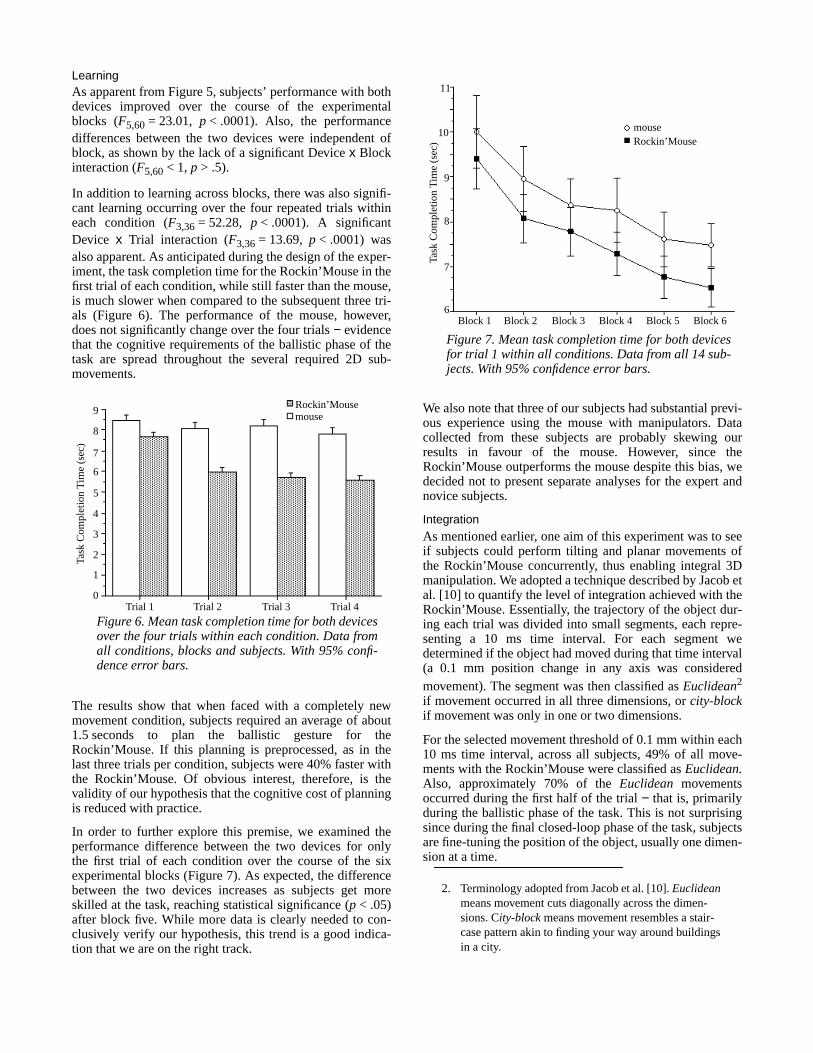
In additionto learningacrossblocks,therewasalsosignifi-cant learningoccurringover the four repeatedtrials withineach condition (F3,36= 52.28, p < .0001). A significantDevice x Trial interaction (F3,36= 13.69, p < .0001) wasalsoapparent.As anticipatedduringthedesignof theexper-iment,thetaskcompletiontimefor theRockin’Mousein thefirst trial of eachcondition,while still fasterthanthemouse,is muchslower whencomparedto thesubsequentthreetri-als (Figure 6). The performanceof the mouse,however,doesnot significantlychangeover thefour trials − evidencethat the cognitive requirementsof the ballistic phaseof thetask are spreadthroughoutthe several required 2D sub-movements.
The resultsshow that when facedwith a completelynewmovementcondition,subjectsrequiredan averageof about1.5seconds to plan the ballistic gesture for theRockin’Mouse.If this planning is preprocessed,as in thelastthreetrials percondition,subjectswere40%fasterwiththe Rockin’Mouse.Of obvious interest, therefore,is thevalidity of ourhypothesisthatthecognitivecostof planningis reduced with practice.
In order to further explore this premise,we examinedtheperformancedifferencebetweenthe two devices for onlythe first trial of eachcondition over the courseof the sixexperimentalblocks(Figure7). As expected,thedifferencebetweenthe two devices increasesas subjectsget moreskilled at the task,reachingstatisticalsignificance(p < .05)after block five. While moredatais clearly neededto con-clusively verify our hypothesis,this trendis a goodindica-tion that we are on the right track.
Wealsonotethatthreeof oursubjectshadsubstantialprevi-ous experienceusing the mousewith manipulators.Datacollected from these subjectsare probably skewing ourresults in favour of the mouse. However, since theRockin’Mouseoutperformsthemousedespitethis bias,wedecidednot to presentseparateanalysesfor the expert andnovice subjects.
IntegrationAs mentionedearlier, oneaim of this experimentwasto seeif subjectscould perform tilting and planarmovementsofthe Rockin’Mouseconcurrently, thus enablingintegral 3Dmanipulation.Weadoptedatechniquedescribedby Jacobetal. [10] to quantifythelevel of integrationachievedwith theRockin’Mouse.Essentially, the trajectoryof theobjectdur-ing eachtrial wasdivided into small segments,eachrepre-senting a 10 ms time interval. For each segment wedeterminedif theobjecthadmovedduringthattime interval(a 0.1 mm position changein any axis was consideredmovement).ThesegmentwasthenclassifiedasEuclidean2
if movementoccurredin all threedimensions,or city-blockif movement was only in one or two dimensions.
For theselectedmovementthresholdof 0.1mm within each10 ms time interval, acrossall subjects,49% of all move-mentswith theRockin’MousewereclassifiedasEuclidean.Also, approximately 70% of the Euclidean movementsoccurredduring thefirst half of the trial − that is, primarilyduring the ballistic phaseof the task.This is not surprisingsinceduringthefinal closed-loopphaseof thetask,subjectsarefine-tuningthepositionof theobject,usuallyonedimen-sion at a time.
Rockin’Mousemouse
Trial 1 Trial 2 Trial 3 Trial 40
1
2
3
4
5
6
7
8
9
Task
Com
plet
ion
Time
(sec
)
Figure6. Meantaskcompletiontimefor bothdevicesover thefour trials within each condition.Data fromall conditions,blocks and subjects.With 95% confi-dence error bars.
2. Terminologyadoptedfrom Jacobetal. [10]. Euclideanmeans movement cuts diagonally across the dimen-sions. City-block means movement resembles a stair-casepatternakin to findingyourwayaroundbuildingsin a city.
Rockin’Mousemouse
Block 1 Block 2 Block 3 Block 4 Block 5 Block 66
7
8
9
10
11
Task
Com
plet
ion
Time
(sec
)
Figure 7. Meantaskcompletiontimefor bothdevicesfor trial 1 within all conditions.Data fromall 14sub-jects. With 95% confidence error bars.
Theseresultsclearly indicatethat, whereappropriate,sub-jectswereableto control threedimensionssimultaneouslywith the Rockin’Mouse.It is noteworthy that this level ofintegration was achieved despite limited practice.
Subjective EvaluationUpon completionof the experimentaltrials, subjectsfilledout a questionnaire.Eleven of the fourteensubjectspre-ferred the Rockin’Mouseto the mousefor the given task.Interestingly, two of the subjects who preferred theRockin’Mousewere expert manipulatorusers.Finally, allthesubjectssaidthey felt they wereableto controlall threedimensions simultaneously with the Rockin’Mouse.
FUTURE DIRECTIONSThe results of our experiment indicate that theRockin’Mouseis apromisingdevice for integral3D interac-tion. However, morework is clearlyrequiredto gainabetterunderstandingof the capabilities,and limitations, of thedevice. In particular, we are interestedin the long termlearningeffects: will usersbe able to significantly reducethecognitive costof planningtheRockin’Mouse’s gesture?We also intend to explore different control-displaymap-pings; for instance,first or secondorder control-displaymappingsmaybeappropriatefor taskssuchasnavigatingin3D scenes.
In our experiment,left-right and forward-backward move-mentsof the Rockin’Mousecontrolledthe object’s move-mentin thex andz directionsrespectively, while clockwise-anticlockwise tilt controlled object movement in the y-direction.We felt that this wasanintuitive mappingsinceitexploits the 1-1 mapping of device movement to objectmovementin two (x, z) of the threeaxes;however, alterna-tive mappings clearly merit further investigation.
Asidefrom thenew interactiontechniquesthatwill inevita-bly needto be developedfor the Rockin’Mouseto be used
in other interactiontasksusing the dominanthand,useofthe device in the non-dominanthandalsomerits investiga-tion. For example,virtual cameracontrol [22] couldbeper-formed using the non-dominant hand while the userinteracts with objects in the scene with the dominant hand.
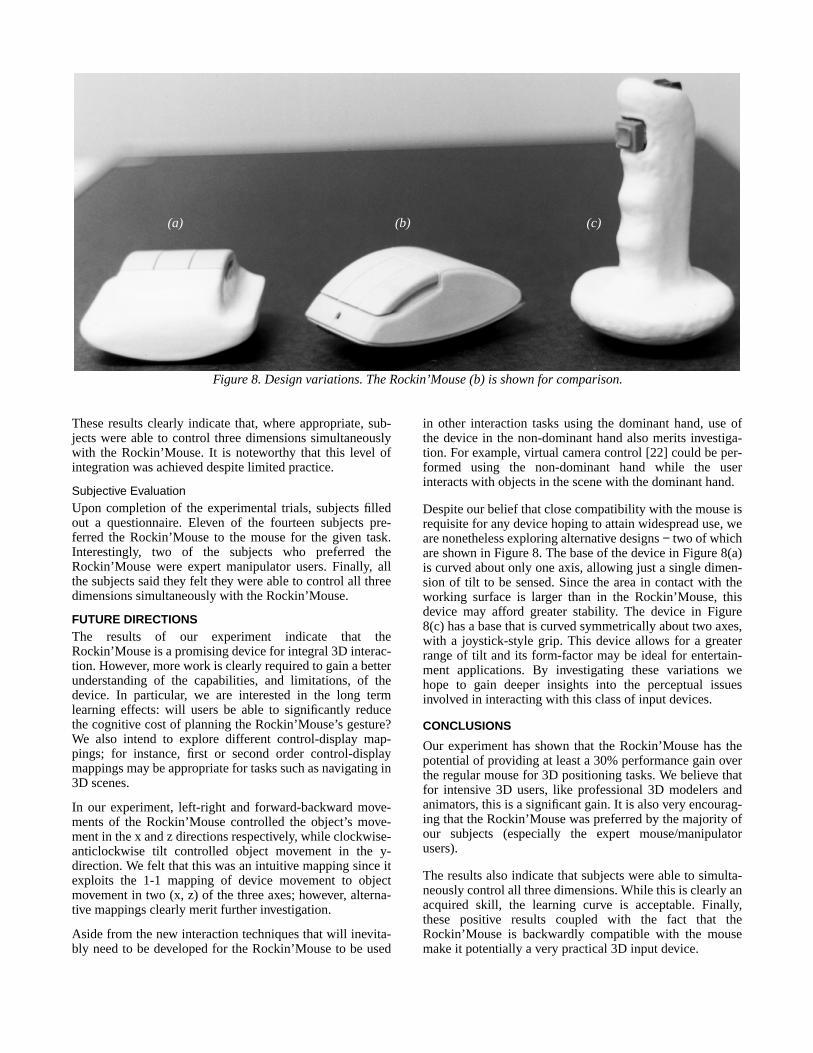
Despiteourbelief thatclosecompatibilitywith themouseisrequisitefor any device hopingto attainwidespreaduse,wearenonethelessexploringalternativedesigns− two of whichareshown in Figure8. Thebaseof thedevice in Figure8(a)is curvedaboutonly oneaxis,allowing just a singledimen-sion of tilt to be sensed.Sincethe areain contactwith theworking surface is larger than in the Rockin’Mouse,thisdevice may afford greaterstability. The device in Figure8(c) hasa basethatis curvedsymmetricallyabouttwo axes,with a joystick-stylegrip. This device allows for a greaterrangeof tilt andits form-factormay be ideal for entertain-ment applications.By investigating these variations wehope to gain deeper insights into the perceptualissuesinvolved in interacting with this class of input devices.
CONCLUSIONS
Our experimenthasshown that the Rockin’Mousehasthepotentialof providing at leasta 30%performancegain overtheregularmousefor 3D positioningtasks.We believe thatfor intensive 3D users,like professional3D modelersandanimators,this is asignificantgain. It is alsoveryencourag-ing thattheRockin’Mousewaspreferredby themajority ofour subjects (especially the expert mouse/manipulatorusers).
Theresultsalsoindicatethatsubjectswereableto simulta-neouslycontrolall threedimensions.While this is clearlyanacquired skill, the learning curve is acceptable.Finally,these positive results coupled with the fact that theRockin’Mouseis backwardly compatiblewith the mousemake it potentially a very practical 3D input device.
Figure 8. Design variations. The Rockin’Mouse (b) is shown for comparison.
(a) (b) (c)
ACKNOWLEDGMENTSWe thank Bill Buxton for valuablediscussionsduring thecourseof this work. We’d also like to thankall the volun-teerswho participatedin our experiment.We aregratefultoWacomTechnologyCorporationfor generouslyprovidingthe cordlesstilt-position sensorsthat enabledus to proto-type our design.
Alias|Wavefront Inc. is seekingtrademarkand patentpro-tection for the Rockin’Mouse.
REFERENCES1. Buxton, W. (1986). There’s more to interaction than
meetstheeye:Someissuesin manualinput. In Norman,D. A. andDraper, S. W. (Eds.),User Centered SystemDesign: New Perspectiveson Human-ComputerInter-action, 319-337. Lawrence Erlbaum: New Jersey.
2. Buxton, W. (1986). Chunking and phrasing and thedesign of human-computerdialogues.Proceedingsofthe IFIP World ComputerCongress, 475-480.Dublin,Ireland.
3. Bier, E. A. (1986).Skittersand Jacks:Interactive 3-Dpositioning tools. Proceedingsof 1986 Workshop onInteractive3-D Graphics, 183-196.ChapelHill, NorthCarolina.
4. Card, S. K., Mackinlay, J. D., & Robertson,G. G.(1991).A morphologicalanalysisof thedesignspaceofinput devices. ACM Transactionson Information Sys-tems, 9, 99-122.
5. Chen, M., Mountford, S. J., & Sellen, A. (1988). Astudy in interactive 3-D rotation using 2-D controldevice.Computer Graphics, 22, 4, 121-129.
6. Corner, D. B., Snibbe,S. S., Herndon,K. P., Robbins,D. C., Zeleznik,R. C., & van Dam, A. (1992).Three-dimensionalwidgets.ComputerGraphics,25, 2, 183-188.
7. Evans,K. B., Tanner, P. P., & Wein, M. (1981).Tabletbasedvaluatorsthat providesone,two or threedegreesof freedom.Computer Graphics, 15, 3, 91-97.
8. Houde,S. (1992). Iterative designof an interface foreasy3-D direct manipulation.Proceedingsof the CHI‘92 Conferenceon HumanFactors in ComputingSys-tems, 135-142. ACM: New York.
9. Jacob,R. J. K., & Sibert,L. E. (1992).The perceptualstructure of multidimensional input device selection.Proceedingsof theCHI ‘92 Conferenceon HumanFac-tors in Computing Systems, 211-218. ACM: New York.
10.Jacob,R. J. K., Sibert, L. E., McFarlane, D. C., &
Mullen, M. P. (1994). Integrality and separabilityofinput devices.ACM Transactionson Computer-HumanInteraction, 1, 1, 3-26.
11.Logitech Magellan Space Control Mouse. ProductInformation. Logitech Inc. Fremont, CA. (http://www.logitech.com).
12.Logitech3D/6D Mouse.ProductInformation,LogitechInc. Fremont, CA. (http://www.logitech.com).
13.Microsoft IntelliMouse.ProductInformation.MicrosoftCorp.Redmond,WA. (http://www.microsoft.com/prod-ucts/hardware).
14.Newell, A., & Rosenbloom,P. S. (1980).Mechanismsof skill acquisitionandthelaw of practice.In Anderson,J. R. (Ed.), Cognitive skills and their acquisition,Lawrence Erlbaum: New Jersey.
15.Nielson,G. M., & Olsem,D. R. (1986).Direct manipu-lation techniquesfor 3D objects using 2D locatordevices.Proceedingsof 1986 Workshopon Interactive3-D Graphics, 175-182. Chapel Hill, North Carolina.
16.Polhemus 3BallTM. Product Information. Polhemus.Colchester, VT.
17.Poulton,E. C. (1966).Unwantedasymmetricaltransfereffectswith balancedexperimentaldesigns.Pyschologi-cal Bulletin, 66, 1, 1-8.
18.Shoemake, K. (1992).ARCBALL: A userinterfaceforspecifyingthree-dimensionalorientationusinga mouse.Proceedingsof GraphicsInterface‘92, 151-156.Cana-dian Information Processing Society: Toronto.
19.Venolia,D. (1993).Facile3D directmanipulation.Pro-ceedingsof the InterCHI ‘93 Conference on HumanFactors in ComputingSystems, 31-36.ACM: New York.
20.WacomTechnologyCorporation.ProductInformation.(http://wacom.com/).
21. Ware,C., & Jessome,D. R. (1988).Usingthebat:a sixdimensionalmousefor object placement.IEEE Com-puter Graphics & Animation, 8, 65-70.
22.Ware,C., & Osborne,S. (1990).Explorationandvirtualcameracontrol in virtual three dimensionalenviron-ments.Computer Graphics, 24, 2, 175-183.
23.Zhai, S. (1995). Humanperformancein six degree offreedominput control. Ph.D. thesis,University of Tor-onto.(http://vered.rose.utoronto.edu/people/shu-min.html).