Embed Size (px)
Citation preview

2018-03-26
The road from GPU-powered prototypes to production ECUs
2018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

22018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Photo: Hamburger Abendblatt /Daimler AG
Since Years:
• Up to 100 small ECUs (Electronic control unit) serving a dedicated function like window lifter or climate control
• Several and highly specialized communication channels between ECUs(CAN, CANFD, FlexRay, LIN, Ethernet)
1:1 relation between functionality and embedded device is standard
Status Quo – Cars as computers with wheels
The road from GPU-powered prototypes to production ECUs
Today:
• Multi-core processors in use on ECUs serving multiple functions
• Software for ECUs is statically configured and flashed with a single image containing all applications and basic software
Challenge:Integration of software of several parties cross company

32018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Status Quo – AUTOSAR Standard enabling work split
The road from GPU-powered prototypes to production ECUs
Decouple application software from hardware
Standardize software interfaces
Standardize configuration concepts
Design the complete vehicle application software over all ECUs
Hardware
Software
Conventional, before AUTOSAR
Application Software
Hardware
AUTOSAR
standardized
HW-specific
AUTOSAR

42018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• Basic software and services
• Tooling for standardized configuration
• Single- and multi-core operating systems
• Functional Safety solutionsISO 26262 certified up to ASIL-D
• Embedded Security solutions
• Certifiable, e.g. Onboard Diagnostics
• Automotive Ethernet software
Solutions for Classic AUTOSAR ECUs
Status Quo – Vehicle infrastructure
The road from GPU-powered prototypes to production ECUs

52018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
GPUs only in use in the infotainment domain!
The road from GPU-powered prototypes to production ECUs
Status Quo – Today’s Vehicle infrastructure

62018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
The road from GPU-powered prototypes to production ECUs
Copyright: IBM

How can we achieve the next level of mobility?

82018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Software over-the-air-updates
• New vehicles features
• Updates and patches
• Silent testing
• Security
The road from GPU-powered prototypes to production ECUs
Requirements and challenges
Dynamic deployment
Remote analytics and diagnostics
Dependable systems
Developer oriented, target independent environment
• User-driven updates
• Network accessible sensors & actuators
• Car as a sensor
• Remote diagnostics
• Fleet campaigns
• Environment independent software
• Easy qualification and deployment
• Small, encapsulated and exchangeable software services (mircoservice)
• Safety
• Security
• Availability
• Reliability
• Maintainability

92018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• Mix of:classic microcontrollers andpowerful “cellphone” processors
• Mix of:classic automotive networksand cloud connectivity
• Mix of:safety-relevant functionsand apps installed bythe user
Possible next generation vehicle infrastructure architecture
The road from GPU-powered prototypes to production ECUs
UIComputing
Cluster
Cental HAD Cluster(s)
Smart Antenna
Gateway IO Concentrators, Actors, Sensors
SmartSensors
SmartSensors
Steering
Braking Battery
EngineBack-end System
Gigabit Ethernet
Reliable ECU
Performance ECU
IO Concentrators
Back-end Server

102018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Trajectory Control
Longitudinal Control
Lateral Control
Positioning
Object Fusion
Grid Fusion
Behavior
Road and Lane Fusion
Vehicle Database
Fun
ctio
n S
pe
cifi
c V
iew
s
Ve
hic
le A
bst
ract
ion
-Se
nso
rs
Ve
hic
le A
bst
ract
ion
-A
ctu
ato
rs
MotionManagement
Safety Management
Behavior
Behavior
Situative Behavior ArbitrationSensorData Fusion
HMI Management
SituationAnalysis
SituationAnalysis
SituationAnalysis
PathPlanning
PathPlanning
PathPlanning
Sensor fusion system requirements spanning across
The road from GPU-powered prototypes to production ECUs
Grid Fusion

112018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Grid Fusion in action
The road from GPU-powered prototypes to production ECUs
Bayes based Grid Fusion
– Traditional occupancy fusion
– Storing probability of occupancy
– Needs less memory due to smaller state vector
Demster-Shafer based Grid Fusion
State of the art occupancy fusion
Storing evidence of occupancy/free
Various sensor models
Use-case: free space detection, path planning
Height Map
Storing height value and confidence
Processes 3D data
Use-case: ramp/hole detection, preprocessing for other fusion algorithms

122018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Trajectory Control
Longitudinal Control
Lateral Control
Positioning
Object Fusion
Grid Fusion
Behavior
Road and Lane Fusion
Vehicle Database
Fun
ctio
n S
pe
cifi
c V
iew
s
Ve
hic
le A
bst
ract
ion
-Se
nso
rs
Ve
hic
le A
bst
ract
ion
-A
ctu
ato
rs
MotionManagement
Safety Management
Behavior
Behavior
Situative Behavior ArbitrationSensorData Fusion
HMI Management
SituationAnalysis
SituationAnalysis
SituationAnalysis
PathPlanning
PathPlanning
PathPlanning
Sensor fusion system
The road from GPU-powered prototypes to production ECUs
Scalable, standardized interfaces
Scalableinputs
Grid Fusion
Algorithm core
Interface 1high volumefor central ECU use
Interface 2mid volumefor FlexRay / Ethernet
Interface 3low volumefor CAN
SonarSensor Interface
SonarSensor Adapter
LidarSensor Interface
LidarSensor Adapter
RadarSensor Interface
RadarSensor Adapter
For such application we need (parallel) computing power!

132018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Trajectory Control
Longitudinal Control
Lateral Control
Positioning
Object Fusion
Grid Fusion
Behavior
Road and Lane Fusion
Vehicle Database
Fun
ctio
n S
pe
cifi
c V
iew
s
Ve
hic
le A
bst
ract
ion
-Se
nso
rs
Ve
hic
le A
bst
ract
ion
-A
ctu
ato
rs
MotionManagement
Safety Management
Behavior
Behavior
Situative Behavior ArbitrationSensorData Fusion
HMI Management
SituationAnalysis
SituationAnalysis
SituationAnalysis
PathPlanning
PathPlanning
PathPlanning
Sensor fusion system
The road from GPU-powered prototypes to production ECUs
Scalable, standardized interfaces
Scalableinputs
Grid Fusion
Algorithm core
Interface 1high volumefor central ECU use
Interface 2mid volumefor FlexRay / Ethernet
Interface 3low volumefor CAN
SonarSensor Interface
SonarSensor Adapter
LidarSensor Interface
LidarSensor Adapter
RadarSensor Interface
RadarSensor Adapter
How to achieve system abstraction?

142018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Adaptive AUTOSAR Basis
Adaptive AUTOSAR Services
Next generation of standardized basic software Adaptive AUTOSAR
The road from GPU-powered prototypes to production ECUs
(Virtual) Machine / Hardware
Application ApplicationApplicationApplication Application
Communication
Management
API
Operating system
API
Platform Health
Management
API
Execution
Management
API
Persistency
API
Time
Management
API
Logging and
Tracing
API
Software
Configuration
Management
Service
Security
Management
Service
Diagnostics
Service
Bootloader
ara::comCommunication API

152018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Possible high performance controller architecture for SOP in 2019
The road from GPU-powered prototypes to production ECUs
AUTOSAR OS
Adaptive AUTOSARQM
App App
MCU
Classic AUTOSAR
Automotive-grade Hypervisor
Adaptive AUTOSARSafety
App
LINUX OS LINUX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
SecurityTEE
App
HSM
Trusted OS
Security Partition
Classic AUTOSAR Safety
App
Safety Core
Safety OS
Safety
Safety Core
1oo2

162018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Worksplit in automotive supply chain
The road from GPU-powered prototypes to production ECUs
16
AUTOSAR OS
Adaptive AUTOSARQM
App App
MCU
Classic AUTOSAR
Automotive-grade Hypervisor
Adaptive AUTOSARSafety
App
POSIX OS POSIX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
SecurityTEE
App
HSM
Trusted OS
Security Partition
MCAL (Drivers) MCAL (Drivers) DriversDriversDrivers
Function development: SW supplierFunction integration: Tier 1
Interface Definition: OEMNetwork deployment: OEM
Middleware development: Basic software supplierMiddleware configuration: Tier 1
Driver development: Hardware supplierDriver integration: Tier 1
OS development: OS supplierOS configuration integration: Tier 1
Hypervisor development: Hypervisor supplierResource partitioning: Tier 1

172018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Standardization in AUTOSAR
The road from GPU-powered prototypes to production ECUs
17
AUTOSAR OS
Adaptive AUTOSARQM
App App
MCU
Classic AUTOSAR
Automotive-grade Hypervisor
Adaptive AUTOSARSafety
App
POSIX OS POSIX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
SecurityTEE
App
HSM
Trusted OS
Security Partition
MCAL (Drivers) MCAL (Drivers) DriversDriversDrivers
Software component descriptionSoftware component configuration
Standardized APIsStandardized network configuration
Standardized functionality and configuration
Standardized APIsStandardized configuration
Classic AUTOSAR:Standardized functionality and configuration

182018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
How to use GPUs for automotive applications?
The road from GPU-powered prototypes to production ECUs
AUTOSAR OS
Adaptive AUTOSARQM
App App
MCU
Classic AUTOSAR
Automotive-grade Hypervisor
Adaptive AUTOSARSafety
App
POSIX OS POSIX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
SecurityTEE
App
HSM
Trusted OS
Security Partition
MCAL (Drivers) MCAL (Drivers) DriversDriversDrivers
How to grant access to GPUs as hardware accelerators to• Multiple independently developed applications• Applications that are developed without focus on specific HW architecture• Applications that reside in different hypervisor partitions
How to provide reasonable freedom from interference between those applications

Integrating GPUs in software infrastructure
2018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.

202018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Current integration in (most) prototypes
The road from GPU-powered prototypes to production ECUs
20
AUTOSAR OS
Adaptive AUTOSARQM
App App
MCU
Classic AUTOSAR
Automotive-grade Hypervisor
Adaptive AUTOSARSafety
App
POSIX OS POSIX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
SecurityTEE
App
HSM
Trusted OS
Security Partition
MCAL (Drivers) MCAL (Drivers) DriversDriversDrivers

212018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Current integration in (most) prototypes
The road from GPU-powered prototypes to production ECUs
21
Adaptive AUTOSARQM
App
MCU
POSIX OS
Classic AUTOSAR Safety
App
Safety Cores
Safety OS
Performance Cores and HW accelerators
Performance Partitions for Vehicle & Consumer Functions Safety Partition
MCAL (Drivers)Drivers
GPU Library+
Driver
• Application becomes hardware-dependent
• Applications must explicitly share the GPU –application dependencies
• No integration into Health Monitoring
It actually works!

222018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Adaptive AUTOSAR Basis
Adaptive AUTOSAR Services
Standardized basic software – Adaptive AUTOSAR
The road from GPU-powered prototypes to production ECUs
(Virtual) Machine / Hardware
Application ApplicationApplicationApplication Application
Communication
Management
API
Hardware
Acceleration
API
Operating system
API
Platform Health
Management
API
Execution
Management
API
Persistency
API
Time
Management
API
Logging and
Tracing
API
Software
Configuration
Management
Service
Security
Management
Service
Diagnostics
Service
Bootloader
ara::comCommunication API
Goal:• Uncouple application design
from the hardware it is deployed upon
Functionality to be included:• Libraries for using GPUs for
ADAS applications• E.g. Tensorflow,
Parallel STL, OpenCV• Build on top of e.g.
CUDA, SYCL
Likely not standardized before 03/2019

232018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Sharing a GPU across virtual machines
The road from GPU-powered prototypes to production ECUs
GPU-Drv
VM VM
vGPU
GPU-Drv
Performance Controller
User Space
Hypervisor
Hardware
vGPU
GPU-Drv
GPU
Emulation Passthrough
VM VM
Performance Controller
GPU-Drv
GPU
Driver in Guest
VM VM
Performance Controller
GPU-Drv
GPU
vGPU
GPU Virtualization
VM VM
Performance Controller
GPUMngmt
GPU
GPU-Drv
GPU-Drv

242018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
What have we achieved so far:
• Standardization of APIs and abstraction from hardware
– Allows to develop applications independent of ECU projects
• Enabling GPU virtualization
– Allows sharing hardware resources in a more efficient manner
Integration should work. Now let’s make things safe and secure.
Are we done yet?
The road from GPU-powered prototypes to production ECUs

252018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
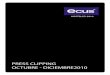
Vehicles affected(Milion)
Vehicles affected(Per day)
Recalls(Total)
Vehiclessold
(Million)
Recalls per sold
vehicle
2014 51.0 139,726 779 16.45 3.1
2015 51.2 140,274 868 17.39 2.9
2016 53.2 145,753 927 17.46 3.0
• Software-related recalls have gone from less than 5 % in 2011 to 15 % by end of 20151
roughly 7.68 Million software related car recalls in 2015
• Software vendors are liable for their products in the automotive sector
The reality: Automotive recalls in the US
The road from GPU-powered prototypes to production ECUs
1Stout Risius Ross (SSR), Automotive Warranty & Recall Report 2016
Data courtesy of NHTSA

262018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• Quality- and verification driven
• Common standard: Automotive SPICE v3.1 for development processes
• In addition: most OEMs have further standards
• Process assessments are regularly performed by customers:OEM -> Tier-1 -> Tier-2 -> ...
• A Tier-1 is fully liable for the complete product, including the software
Software development for automotive (ASPICE)
The road from GPU-powered prototypes to production ECUs

272018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Functional Safety according to ISO 26262
The road from GPU-powered prototypes to production ECUs
27
Functional Safety Concept
2) Management of Functional Safety
Safety Management during Item Development
3) Concept Phase
8) Supporting Processes
7) Production and
Operation
5) Hardware Development
System Dev. Initiation
System Requirements
4) System Development
Observation
Service
Production
Item Definition
Start Safety Lifecycle
System Design
Safety Management after SOPOverall Safety Management
Release
Item Integration, Test
InitiationInitiation
HW Design
HW Integration and Testing
HW Failure Rate
Hazard & Risk Analysis
Validation & Safety Assessment
SW Safety Requirements
SW Design
SW Integration and Testing
SW Unit Testing
SW Unit Design & Implementation
Verification of SW Safety Requirem.
9) ASIL-oriented and Safety-oriented Analysis
Distributed Development
Mgmt. of Safety Requirements
Configuration Management
Requirement Decomposition
Change Management
Verification
Coexistence of Elements
Qualification of SW Comp.
Qualification of HW Comp.
Proven in Use Argumentation
Analysis of dependent Failures
Documentation
Qualification of SW Tools
Safety Analysis
HSI
HW Architectural Metrics
HW Safety Requirements
1)
Vocabu-
lary
6) Software Development
10)
Guide-
line
ISO 26262 has• 10 parts• 500 pages• 43 Chapters• 600 Requirements• 100 Work Products• 180 Methods
Only the parts 1-9are normative

282018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Functional Safety Requirements (ISO 26262)
The road from GPU-powered prototypes to production ECUs
28
Safety Requirements
Automotive Safety Integrity Level ASILASIL = Severity x Exposure x Controllability
Functional Description Hazard & Risk Analysis

292018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Functional Safety Requirements (ISO 26262)
The road from GPU-powered prototypes to production ECUs
29
Drive in the city@35mph
Collide with pedestrian@35mph
Safety Requirements
Automotive Safety Integrity Level ASILASIL = Severity x Exposure x Controllability
Functional Description Hazard & Risk Analysis

302018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Functional Safety Requirements (ISO 26262)
The road from GPU-powered prototypes to production ECUs
30
Drive in the city@35mph
Collide with pedestrian@35mph
Safety Requirements
Automotive Safety Integrity Level ASILASIL = Severity x Exposure x Controllability
Functional Description Hazard & Risk Analysis

312018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
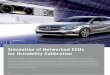
Hazard and Risk Assessment in a nutshell
The road from GPU-powered prototypes to production ECUs
31
C1 C2 C3
S1
E1 QM QM QM
E2 QM QM QM
E3 QM QM A
E4 QM A B
S2
E1 QM QM QM
E2 QM QM A
E3 QM A B
E4 A B C
S3
E1 QM QM A
E2 QM A B
E3 A B C
E4 B C D
HazardPotential source of harm, caused by malfunctioning behavior of the itemExample: Not detecting a pedestrian on the street
Operational situationScenario that can occur during a vehicle's life, in which the hazard creates a considerable riskExample: Driving at speed > 35 mph on a street operating with an activated Highway Chauffeur
Possible avoidance actions Things that the driver or other involved person are able to do in order to avoid the harmExample: Driver immediately brakes with full power
Controllability (C0-C3)Probability that one of the involved persons is able to avoid the harmExample: Normally not controllable => C3
Exposure (E0-E4)Probability of the operational scenarioExample: High probability => E4
Severity (S0-S3)Impact of the harmExample: Life-threatening injuries => S3

322018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Functional Safety Requirements (ISO 26262)
The road from GPU-powered prototypes to production ECUs
32
Drive in the city@35mph
Collide with pedestrian@35mph
Safety RequirementsSeverity 3: Severe injuries expected.Exposure 4: Pedestrians in car‘s path likely. = ASIL-DControllability 3: Driver is sleeping.ASIL = Severity x Exposure x Controllability
Functional Description Hazard & Risk Analysis

332018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• Redundant channels (e.g.: 1oo2D)
• 3 Layer safety solution (E-Gas concept)
• Safety parts fully certified up to ASIL-D
Strategies to achieve safety for highly automated driving
The road from GPU-powered prototypes to production ECUs
Performance MCU Safety MCU
EB tresos AutoCore
Performance MCU 1/2
Diagnostic Functions
CAN
SW-CASIL D
TimE
AdaptiveCore
Channel 1/2
MCAL
Program Flow monitoring
Protected communication
Ethernet | SPI
Linux
Safety RTE
Safety OS
Safety E2E
Communication Management
Platform Health Management
Safety Island
EB tresos AutoCore
TimESafety
OS

342018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
• The standard is being worked on:ISO/SAE 21434 – Cybersecurity Engineering
• Contains general requirements, will probably include requirements for software updates
• Publication: end of 2019
Projects with an SOP in 2019 / 2020 need to take it into account.
Cybersecurity engineering
The road from GPU-powered prototypes to production ECUs

352018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
The road from GPU-powered prototypes to production ECUs
ECU
In-vehicle network
External interface
End-to-end security
35
Hardware enhanced cryptography
Embedded security mechanisms
Cyber security fleet monitoring (IDS)
Cyber security analysis & response
Security solutions
Software update over-the-air
EB Argus

362018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
The road from GPU-powered prototypes to production ECUs
36
Summary
EB extended the safety product portfolio to fulfill the requirements of high performance ECUs
Application Software
Hardware
AUTOSAR
EB & Argus are offering an end-to-end-security solution for the future vehicle architecture
Enabling standardized GPU virtualizationAllows sharing hardware resources in a efficient way
Standardization of Middleware to develop application independent for high performance ECUs

372018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
The road from GPU-powered prototypes to production ECUs
EB tresos solution for NVIDIA DRIVE PX 2 Visit our booth at the GTC
#532
37
Adaptive & Classic AUTOSAR for DrivePX planned to be available at October 2018!
• Integrating technologies from NVIDIA, Infineon (safety processor) and EB
• The EB software provides seamless integration capability of Linux and AUTOSAR applications

Questions?
2018-03-26 | GTC 2018 | Public | © Elektrobit Automotive GmbH 2018.All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.