Embed Size (px)
Citation preview

The primary goal of the Air Muscle Artificial Limb project is to design, build, and control a robotic hand with realistic finger motions; all gesticulations are made possible via forces produced by pneumatic muscles. Dr. Kathleen Lamkin-Kennard, of the Bio-Mechanical Engineering Dept. at RIT, facilitated the project with specific product requirements and team guidance. In order to achieve the project objective, a team of engineers was divided into Design/Build, Controls, and Air Muscles sub-teams. During the initial stage of the project, three fingers were prototyped, control algorithms were created, and air muscles were characterized in order to produce a consistently and accurately controlled hand. The final product is an aluminum hand with index, middle, and ring phalanges that are capable of achieving four degrees of freedom (DOF): flexion, extension, abduction, and adduction.
Jonathan Kasper / Project Manager Matthew Lewis / Design Lead Mark McKann / Controls Team
Jenna Fike / Lead Engineer Josa Hanzlik / Air Muscle Team Nick Rappa / Controls Team
Dr. Kathleen Lamkin-Kennard / Advisor Ellen Cretekos / Air Muscle Team Eric Giang / Controls Team
Project #: P08023
Design/Build Team : responsible for configuring and producing a robotic hand that was capable of the requisite hand motions; this included the production of:
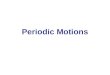
Displacement (Length)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
2 2.5 3 3.5 4 4.5 5 5.5Length (in)
Dis
pla
ce
me
nt
(in
)
20 PSI
40 PSI
60 PSI
Controls Team : in charge of implementing control mechanisms and algorithms for management of the solenoid valves that were used to manipulate air flow
Air Muscle Team : focused on the development and implementation of air muscles for the project:
o Determined the method for constructing reproducible muscleso Evaluated optimal sizes and materialso Characterized the bladders so that they were capable of consistently producing the necessary forces
o CAD drawingso Prototypeso Final functioning hand
Artificial Limb CAD DesignFinger CAD Design
Read configuration file to determine relative
potentiometer range
Wait for User’s Command
Call AB/AD module
Determine current % flexion
Finger Abducts or Adducts
Cycle extension valve once
Cycle flexion valve once
Finger Flexes by Instructed
Percentage
= Ab/Adduction Instruction
= n% Flexion Instruction
= Too Flexed
= Too Extended
= Absolute Direction
LabVIEW Relay Board
Valves
DAQ
Air Muscles
Potentiometer
Feedback
System Architecture
Portable Air Compressor
Logic Diagram of Finger Actuation Control
Push-to-connect
Mesh Material: PET
Inside Tubing: Rubber
Eye-Hook
Air Muscle Displacement Based on Pressure and Length
Dr. Kathleen Lamkin-Kennard, Mr. John Wellin, Mr. Scott Kennard, Dr. Steven Day, Dr. Matthew Marshall, Mr. William Scarbrough, Mr. Edward Hanzlik, Mr. David Hathaway, Dr. Mark Kempski, Mr. Robert Kraynik, Mr. Steven Kosciol, and Mr. Jonathan Niebielski Special Thanks to RIT New Faculty Development Grant for Funding
o 3 Fingers capable of the 4 DOF: Flexion/Extension & Abduction/Adduction
o Control Feedback obtained via Linear Potentiometers
o Forces produced by 9 Air Muscles with the following lengths:
o [3] Abduction & [3] Adduction – 2.5 in
o [3] Flexion – 7 in
o Ease of air muscle serviceability
o User-Friendly LabVIEW Interface
o Addition of pinky, thumb, and wrist motion
o Grasping capabilities and tactile feedback
o Simultaneous flexion of varying degrees
o Air muscles with increased life expectancy
o Improvements in maintenance and assembly
Final Limb