Embed Size (px)
Citation preview

The Price of Atomic Selfish Ring Routing∗
Bo Chen† Xujin Chen‡ Xiaodong Hu§
May 2008
Abstract
We study selfish routing in ring networks with respect to minimizing the maximum la-tency. Our main result is an establishement of constant bounds on the price of stability(PoS) for routing unsplittable flows with linear latency. We show that the PoS is at most6.83, which reduces to 4.57 when the linear latency functions are homogeneous. We alsoshow the existence of a (54,1)-approximate Nash equilibrium. Additionally we address somealgorithmic issues for computing an approximate Nash equilibrium.
1 Introduction
A major component of large-scale network systems is the routing mechanism, namely choosing
communication paths between sources and destinations of traffic. In choosing a routing path,
a typical objective is to minimize the maximum latency. In many of these network systems
it is impossible to maintain a central authority that imposes efficient routing strategies on the
network traffic. As a result, users act independently and “selfishly”: each user tries to minimize
his own traffic latency based on current network traffic.
This problem can be mathematically formalized in terms of classical game theory as follows.
The network users are viewed as independent players participating in a non-cooperative game.
(In this paper we use terms “user” and “player” exchangeably.) Each player, with his own
pair of source and destination in the network, wishes to establish a communication between
the source and the destination using one or more paths with latency as low as possible, given
the link congestion caused by other players. We are interested in situations where the system
has reached some kind of stable state. The most popular notion of stability in non-cooperative
game theory is the Nash equilibrium: a “stable point” for the players, from which no player has∗To appear in Journal of Combinatorial Optimization†Corresponding author: Warwick Business School (WBS) and Centre for Discrete Mathematics and its Appli-
cations (DIMAP), University of Warwick, Coventry, CV4 7AL, United Kingdom, [email protected]‡Institute of Applied Mathematics, Chinese Academy of Sciences, Beijing 100080, China, [email protected]§Institute of Applied Mathematics, Chinese Academy of Sciences, Beijing 100080, China, [email protected]
1

the incentive to deviate unilaterally. It is well known that Nash equilibria do not in general
optimize the social welfare and can be far from the global optimum. In their seminal paper
[14], Koutsoupias and Papadimitriou proposed to analyze the performance degradation due to
lack of players’ coordination from a worst-case perspective; this leads to the notion of price of
anarchy (PoA), which is the ratio between the worst social cost of a Nash equilibrium to the
cost of social optimum. A more recent measure, the price of stability (PoS), was defined in [2] to
capture the gap between the best possible Nash equilibrium and the globally optimal solution.
This measure becomes more and more prevalent as it measures the minimum penalty in network
performance required to ensure a stable (equilibrium) outcome, and thus it is crucial from the
network designer’s perspective, who would like to propose (rather than let the players end up
in) a Nash equilibrium that is as close to the global optimum as possible.
The ring topology is a fundamental topology that is frequently encountered in communication
networks, and thus it has attracted considerable attention in research community [1, 20, 22, 4].
However, even in a ring, the simplest 2-connected network, the problem of choosing routes in
response to communication requests is not trivial. Additionally, in many real networks that
involve ring topology the traffic demand from a source to a destination must be satisfied by
choosing a single path between the source and the destination. For example, splitting the
traffic causes the problem of packet reassembly at the receiver and thus is generally avoided [3].
Motivated by the wide practical applications, we study the unsplittable model (unless otherwise
noted explicitly) in this paper, and investigate the deterioration of ring network performance
measured in maximum traffic latency under the selfish user behaviors.
The general model
Consider a network G = (V, E) with node set V , link set E, and source-destination node pairs
(si, ti),i = 1, . . . , k, where G is called a single-commodity network if k = 1 and a multi-commodity
network if k ≥ 2. For each i, the nonempty set Pi consists of paths with ends si and ti, called
si-ti paths, in G; in addition there is one unit of traffic to be routed from si to ti through path(s)
in Pi. A (feasible) flow f for this network is a nonnegative real function on P = ∪kj=1Pj with∑
P∈PifP = 1 for every i = 1, 2, . . . , k. Each link e ∈ E bears a load with respect to f defined
as fe =∑
P∈P:e∈E(P ) fP , the sum of flow along e; and each e ∈ E is associated with a load-
dependent latency (function) le(·), meaning that every path P in G with e ∈ E(P ) experiences
latency le(fe) along e. The latency of a path P in G with respect to flow f is thus defined as
lP (f) =∑
e∈E(P ) le(fe). For flow f , we use Mi(f) = maxP∈Pi:fP >0 lP (f) to denote the maximum
2

latency experienced by traffic from si to ti (i.e., by user i), and use
M(f) ≡ max1≤i≤k
Mi(f) = maxP∈P:fP >0
lP (f) (1.1)
to denote the maximum latency experienced by all network traffic. We call Mi(f) the maximum
latency of user i (w.r.t. f) and M(f) the maximum latency of the network or overall traffic. A
selfish routing model is then specified by a triple (G, (si, ti)ki=1, l), and it captures the setting
where each user wishes to minimize his own maximum latency while the network designer (for
social welfare) aims at minimizing the maximum latency of the network. Note that selfish
routing is naturally generalized to weighted selfish routing which requires that the amount of
flow routed from si to ti be a given integer di, i = 1, 2, . . . , k, in stead of just one unit as in
(unweighted) selfish routing.
A network game/routing is said atomic if there are finitely many players, each controlling
a non-negligible amount of flow (in unweighted setting, that is one unit). An atomic routing is
unsplittable if every player must route his flow along a single path [3, 6, 12, 19]; it is splittable if
players are permitted to route their flow fractionally [7]. In contrast, a network game/routing
is said nonatomic if every player controls a negligible portion of the overall traffic so that the
actions of a single individual have negligible impact on the latency caused by others.
Related results
The selfish routing model falls within the general framework of congestion game [17], which has
the fundamental property that a Nash equilibrium always exists in pure strategies. On the other
hand, it has been shown that finding a Nash equilibrium for multi-commodity congestion games
is PLS -complete [10], though a pseudo-polynomial-time algorithm is available for computing a
Nash equilibrium in any atomic congestion game with linear latency functions [12].
When the maximum latency is to be minimized, the PoA of atomic congestion games with
linear latency is 2.5 in single-commodity networks, but it explodes to Θ(√
k) in multi-commodity
networks [6]. Analogously, for nonatomic weighted selfish routing with linear latency, recent work
by Correa et al. [8] has shown the existence of an optimal flow in single-commodity network
that is “fair”. (Remark: “fairness” does not necessarily imply “equilibrium” though they do
bear much similarity). They also proved that it is NP-hard to find an optimal flow in single-
commodity networks, and that the PoS can be unbounded in multi-source-single-sink networks.
The PoA and PoS depend not only on the game itself, but also on the definition of the social
(or system) objective. Previous works in [19, 18, 3, 6] have quantified how much the average
latency of traffic at a Nash equilibrium can exceed that of an optimal solution. Roughgarden
3

[18] proved that, as far as average latency is concerned with nonatomic players, it is actually the
class of allowable latency functions, not the specific topology of the network, that determines
the PoA.
Recently, Busch and Magdon-Ismail [5] studied atomic unsplittable network game/routing
from a bottleneck point of view, where players choose a path with the objective of minimizing the
maximum congestion along the edges of their path; and the social cost is the global maximum
congestion over all links in the network. They showed that the PoS = 1 and PoA = O(`+log n),
where ` is the length of the longest path in the player strategy sets, and n is the size of the
network. The bottleneck objective for nonatomic routing was discussed in [8] with emphasis on
its difference from maximum/average latency objective.
Our contributions and their significance
We focus on the problem of selfish unsplittable routing in ring networks with atomic players and
linear latency, which we refer to as Selfish Ring Routing (SRR). We prove that the PoS of the
SRR problem is at most 6.83 and is at most 4.57 if the linear latency functions are homogenous.
On the other hand, we show that there exists an optimal solution which is a 54-approximate
Nash equilibrium. Our theoretical results lead to pseudo-polynomial time algorithms for finding
solutions of good balance between efficiency and stability.
The vast majority of the work on bounding the PoA and PoS in routing games has been
focused on the criterion of the average latency of all players and on that of the maximum latency
for single-commodity networks, with very few results for multi-commodity networks [3, 16], which
we study in this paper. Our work on ring topology breaks previous restriction to parallel-link
networks or layered networks [14, 9, 12].
Our bounds on the PoA and PoS for ring routing are constants, independent of the network
size and the number of players, which stands in contrast to the unbounded PoA for general
networks [21, 8] with nonatomic players. Based on an elegant example in [21], we further exhibit
below a complementary example, which shows unbounded PoS in general atomic unsplittable
routing with linear latency.
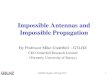
In the selfish routing instance (G, (si, ti)ki=1, l) depicted in Figure 1, the underlying directed
network G = (V,E) has 2h + 4 (h ≥ 4) nodes s1, t1, s, t, u1, v1, u2, v2, . . . , uh, vh and k = 1 + h3
source-destination pairs with s2 = s3 = · · · = sk = s and t2 = t3 = · · · = tk = t. The latency
function on the top link ej (resp. bottom link e′j) from uj to vj , j = 1, 2, . . . , h, is lej (fej ) = hfej
(resp. le′j (fe′j ) = fe′j ). All the other links have zero latency. Evidently, the minimum maximum
latency h2 is realized by the optimal flow f∗ in which one unit of flow between s1 and t1 is
4

routed along the top links, and h3 units of flow between s and t is divided evenly between h
paths, sujvjt, going through the bottom link e′j , j = 1, 2, . . . , h. Let f be any Nash flow. It is
easily seen that the flow between s and t does not go through the link from vj to uj+1 to avoid
unnecessary additional latency and hence fvjuj+1 = 1 for any j = 1, 2, . . . , h − 1. Suppose first
that fsuj ≤ h2 − 2 for some j ∈ 1, 2, . . . , h. Then flow conservation implies that (i) either
fej < h− 1 or fe′j < h(h− 1) and (ii) fsuj′ ≥ h2 + 2 for some j′ ∈ 1, 2, . . . , h − j. From (ii)
we conclude that, between s and t, either at least 1h+1(h2 + 2) > h − 1 units of flow is routed
through ej′ , or at least hh+1(h2 + 2) > h(h− 1) units of flow is routed through e′j′ , which implies
that Mi(f) > h(h−1) for some i ∈ 2, 3, . . . , k. It follows from (i) that player i could reduce his
own latency to a value no more than h(h− 1) by unilaterally changing his strategy to the path
sujvjt, which goes through ej if fej < h− 1 and through e′j if fe′j < h(h− 1). This contradicts
the fact that f is a Nash flow. Therefore, fsuj ≥ h2 − 1 for all j ∈ 1, 2, . . . , h. This together
with flow conservation makes impossible, for any j′, either fej′ < h− 1 or fe′j′
< h(h− 1), since
otherwise some player would benefit by switching his own flow from ej′ to e′j′) or vise versa.
Therefore, fej ≥ h − 1 and fe′j ≥ h(h − 1) for all j = 1, 2, . . . , h, which implies that PoS =
M(f)/M(f∗) ≥ M1(f)/h2 ≥ h2(h− 1)/h2 = h− 1 has lower bound Ω( 3√
k).
Figure 1. Selfish routing instance with unbounded PoS.
Our results demonstrate salient difference between the selfish routing for minimum maximum
latency and that for minimum average/total latency in that network topology does play an
important role for the former, while makes almost no difference in the latter.
Paper organization
After preliminaries in Section 2, we present in Sections 3 and 4 some upper bounds on PoS
and PoA of the SRR problem and the extent to which an optimal solution can be close to the
Nash equilibrium. We then discuss in Section 5 algorithmic issues of finding efficient and stable
solutions of the SRR problem. We conclude the paper in Section 6 with remarks on future
research.
5

2 Preliminaries
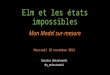
Selfish ring routing with linear latency. As the name suggested, the underlying network
of the selfish ring routing (SRR) model is a ring R = (V,E) which is a (undirected) cycle in
terminology of graph theory (see Figure 2(a) for an illustration, where V = v1, v2, . . . , vnand E = ei = vivi+1 : i = 1, 2, . . . , n). The ring size is defined as |V | = n. For any two
ordered nodes u, v ∈ V , we denote by R[u, v] the clockwise path in R between u, v, and set
R(u, v] = R[u, v]\u, R[u, v) = R[u, v]\v and R(u, v) = R[u, v]\u, v. Given a path P in R,
let x be a node or edge on P , we write x ∈ P , or x ∈ V (P ) or x ∈ E(P ) to avoid confusion.
( ) =( , )a R V E
v1 v2
vn
vn-1
v3
v4
e1
e2
e3en-1
en
vn+1=s1
s2
l xe1( )=
t2
t1
x
l xe3( )= x
l xe2( )=x
4-l xe4( )=x
4-
( ) > , =b PoA 2 PoS 1 ( ) = = /C PoS 8 7PoA
s1 s2
l xe1( )=
t2 t1
x
l xe2( )=2l xe4( )= x5-7
l xe3( )= x2-3
e1
e2
e3
e4
e1
e2
e3
e4
Figure 2. Undirected ring and SRR instances with two players
There are k users 1, 2, . . . , k in the SRR instance (R, (si, ti)ki=1, l), where each user i has commu-
nication request for routing one unit of flow from his source si ∈ V to his destination ti ∈ V , and
his strategy set Pi consists of two link-disjoint si-ti paths Pi and Pi in R, satisfying Pi∪ Pi = R.
For convenience, let ¯Pi = Pi, i = 1, 2, . . . , k. Given feasible (unsplittable) flow f ∈ 0, 1P with
P = ∪ki=1Pi, Pi, in view of the correspondence between f ∈ 0, 1P and user strategies adopted
for the SRR on (R, (si, ti)ki=1, l), we abuse the notation slightly by writing f = Q1, Q2, . . . , Qk
with the understanding that, for each i = 1, 2, . . . , k, Qi ∈ Pi, Pi, f(Qi) = 1 and the one unit
of flow requested by user i is routed along Qi.
The latency le(·) of each link e ∈ E is always assumed to be linear in the link load fe which
equals the number of paths in Q1, Q2, . . . , Qk each going through e. More precisely, for all
e ∈ E, le(fe) = aefe + be, where ae and be are nonnegative reals. The latency l is said to be
homogenous if all be = 0. For any path P in R, possibly P = R, define
laP (f) =∑
e∈E(P )
aefe, ||P ||a =∑
e∈E(P )
ae, ||P ||b =∑
e∈E(P )
be, ||P || = ||P ||a + ||P ||b.
We write Pi = Pi, Pi such that ||Pi|| ≤ ||Pi|| for every i = 1, 2, . . . , k. Note that
||Pi||+ ||Pi|| = ||R||, for every i = 1, 2, . . . , k. (2.1)
6

We say that user i adopts the short path strategy if ||Qi||a ≤ ||Qi||a and the long path strategy
otherwise.
Recall that, in the SRR, users are non-cooperative and each user i wishes to minimize his
own maximum latency Mi(f) in feasible flow f with no regard to the global optimum. We
denote by 〈f〉 the set of users i ∈ 1, 2, . . . , k with Mi(f) = M(f).
Nash equilibria. A Nash equilibrium is characterized by the property that no user has the
incentive to change his strategy unilaterally. Recall that, as a congestion game, selfish ring
routing always allows for a Nash equilibrium in pure strategies. We say that a feasible flow
f = Q1, Q2, . . . , Qk for SRR is at Nash equilibrium or simply call it a Nash (flow) if the
following inequality holds true for every i ∈ 1, 2, . . . , k
lQi(f) ≤∑
e∈E(Qi)
le(fe + 1). (2.2)
For real number α ≥ 1, flow f is called an α-approximate Nash flow if the following inequality
holds true for every i ∈ 1, 2, . . . , k and P ∈ Pi with fP > 0
lP (f) ≤ α∑
e∈E(P )
le(fe + 1). (2.3)
If, in addition, for real number β ≥ 1, the maximum latency M(f) of f is at most β times the
maximum latency OPT achieved by an optimum flow/routing, i.e., M(f) ≤ βOPT, then f is called
an (α, β)-approximate Nash (flow).
Let F be the set of Nash flows for the SRR on (R, (si, ti)ki=1, l). The price of anarchy (PoA)
and the price of stability (PoS) of the SRR instance is given respectively by
ρA(R, (si, ti)ki=1, l) = max
f∈FM(f)OPT
and ρS(R, (si, ti)ki=1, l) = min
f∈FM(f)OPT
. (2.4)
Correspondingly, the PoA (resp. PoS) of the SRR problem is set to be the maximum of
ρA(R, (si, ti)ki=1, l) (resp. ρS(R, (si, ti)k
i=1, l) ) over all SRR instances (R, (si, ti)ki=1, l).
As an example, consider the ring R = (V, E) in Figure 2(b) with V = v1, v2, v3, v4 and
E = e1, e2, e3, e4. The SRR instance (R, (si, ti)i=1,2, l) is given by s1 = v1, t1 = v2, s2 = v3,
t2 = v4, and le1(x) = le3(x) = x, le2(x) = le4(x) = x4 , where x ∈ R+. For i = 1, 2, let
Qi be the clockwise path in R from si to ti. It is easily checked that both f∗ = Q1, Q2and f = Q1, Q2 are Nash flows, and f∗ is an optimum flow for the SRR instance. Hence
ρA(R, (si, ti)i=1,2, l) ≥ M(f)/M(f∗) = 2/1 = 2 and ρS(R, (si, ti)i=1,2, l) = 1. For the SRR
7

instance depicted in Figure 2(c), via enumeration of all four feasible flows, we see that its
optimal flow f∗ = s1s2t1, s2t1t2 has maximum latency M(f∗) = 3.5 while its unique Nash
flow f = s1s2t1, s2s1t2 has M(f) = 4. Hence the PoA and PoS of this instance both equal to
8/7.
The main purpose of the next two sections is to bound from above α and β on any (α, β)-
approximate Nash flow for the SRR problem. Our analysis leads to constant bounds of (1,6.83)
and (54,1), providing indication of the worst-case performance of inefficiency of Nash equilibria
and instability of the optimal solutions, respectively.
3 Inefficiency of Nash equilibria
The main result of this section is the following upper bounds on the PoS. In terms of (α, β)
approximation, we bound β while keeping α = 1.
Theorem 1 The price of stability of the SRR is at most 6.83 and is at most 4.57 if the linear
latency functions are homogenous.
To avoid triviality, we assume in our analysis that there exists an optimal flow f∗ =
Q1, Q2, . . . , Qk for the SRR instance (R, (si, ti)ki=1, l) that is not a Nash flow. Therefore
some user i′ ∈ 1, 2, . . . , k can benefit from unilaterally changing his strategy provided strate-
gies of other users remain the same, which implies that the SRR has a feasible flow f ′ =
Q1, . . . , Qi′−1, Qi′ , Qi′+1, . . . , Qk satisfying lQi′(f∗) + ||Qi′ ||a = lQi′
(f ′) < lQi′ (f∗) ≤ M(f∗),
where the equality is directly based on the definition of new flow f ′. Therefore,
lR(f∗) = lQi′ (f∗) + lQi′
(f∗) < 2M(f∗)− ||Qi′ ||a. (3.1)
Since lQi′(f ′) ≥ ||Qi′ || and lQi′ (f
∗) ≥ ||Qi′ ||, it follows from (2.1) that
||Qi||+ ||Qi|| = ||R|| = ||R||a + ||R||b = ||Qi′ ||+ ||Qi′ || < 2M(f∗) for i = 1, 2, . . . , k. (3.2)
Let f be an arbitrary Nash flow. Suppose, without loss of generality, that users 1, 2, . . . , k are
ordered such that for some 1 ≤ j ≤ k, f = Q1, Q2, . . . , Qj , Qj+1, . . . , Qk. Notice that
lQi(f) + lQi(f) = lR(f) for i = 1, 2, . . . , k. (3.3)
By (2.2), we have
lQi(f) ≤
∑
e∈E(Qi)
le(fe + 1) =∑
e∈E(Qi)
(aefe + ae + be) = lQi(f) + ||Qi||a for i = 1, 2, . . . , j. (3.4)
8

Similarly,
lQi(f) ≤ lQi(f) + ||Qi||a for i = j + 1, j + 2, . . . , k. (3.5)
It is instant from (3.3)–(3.5) and (1.1) that
M(f) ≤ maxQ∈f
lQ(f) + lQ(f) + ||Q||a2
≤ lR(f) + ||R||a2
, (3.6)
and from which, along with (3.2), we obtain
M(f) ≤ lQi(f) +||Qi||a
2+||R||a
2, for i = 1, 2, . . . , j. (3.7)
In what follows, we break the proof of Theorem 1 into two lemmas: the first deals with
homogeneous latency case, whose proof technique is then extended to establishing the second
lemma dealing with the general linear latency case.
Lemma 1 Given any SRR instance with homogeneous linear latency functions, either every
optimal flow is a Nash flow, or the price of anarchy of the instance is at most γ0 = 5+√
172 ≤ 4.57.
Proof. For homogeneous linear latency functions, we have ||·|| = ||·||a. Without loss of generality
assume that γ = ||Q1||||Q1|| = maxj
i=1||Qi||||Qi|| ≥ 1. (Note that if γ < 1, then M(f) ≤ lR(f) < lR(f∗) <
2M(f∗) by (3.1) and we are done.) By (3.2), ||Q1|| = γ||Q1|| implies
||Q1|| = ||R||γ + 1
. (3.8)
Due to homogeneous linearity of the latency function, we have lR(f) = lR(f∗) +∑j
i=1(||Qi|| −||Qi||), from which we can bound lR(f) as follows depending on the value of i′ in inequality
(3.1). If i′ ≤ j, then
lR(f) ≤ 2M(f∗)− ||Qi′ ||+j∑
i=1
(||Qi|| − ||Qi||)
≤ 2M(f∗)− ||Qi′ ||+ (γ − 1)j∑
i6=i′,i=1
||Qi||
≤ 2M(f∗)− γ||Qi′ ||+ (γ − 1)lR(f∗)
≤ 2M(f∗)− γ||Qi′ ||+ (γ − 1)(2M(f∗)− ||Qi′ ||)= 2γM(f∗)− (γ − 1)||R|| − ||Qi′ ||≤ 2γM(f∗)− (γ − 1)||R||.
9

If i′ > j, we can similarly obtain
lR(f) ≤ 2M(f∗)− ||Qi′ ||+ (γ − 1)j∑
i=1
||Qi||
≤ 2M(f∗)− (γ − 1)||Qi′ ||+ (γ − 1)(j∑
i=1
||Qi||+ ||Qi′ ||)
≤ 2M(f∗)− (γ − 1)||Qi′ ||+ (γ − 1)lR(f∗)
≤ 2M(f∗)− (γ − 1)||Qi′ ||+ (γ − 1)(2M(f∗)− ||Qi′ ||)= 2γM(f∗)− (γ − 1)||R||.
Therefore, from the above analysis and (3.6), we derive
M(f) ≤ γM(f∗)− γ − 22
||R||. (3.9)
To prove the lemma, we can assume γ ≥ γ0 thanks to (3.9). Recall the assumption that
||Pi|| ≤ ||Pi|| for i = 1, 2, . . . , k. It is easy to see that the ring load lR(f∗) with respect to the
optimal flow f∗ has the following lower bound:
lR(f∗) ≥k∑
i=1
||Pi||. (3.10)
Among all users whose strategies contribute to lQ1(f), some adopt short path strategies and their
contributions sum up to cs, while the others adopt long path strategies and their contributions
sum up to cl. In other words, lQ1(f) = cs+cl. Observe from (3.10) that cs ≤∑k
i=1 ||Pi|| ≤ lR(f∗).
Hence by (3.1), we have
cl ≥ lQ1(f)− lR(f∗) > lQ1(f)− 2M(f∗). (3.11)
Let us consider an arbitrary user whose strategy, path P , contributes to cl. Recall that ||P || >||R||
2 . It can be deduced from (3.8) that
||P ∩ Q1|| ≥ ||P ||− ||Q1|| > ||R||2
−||Q1|| = γ + 12
||Q1||− ||Q1|| = γ − 12
||Q1|| ≥ γ − 12
||P ∩Q1||.(3.12)
Therefore, the contribution of this user to lQ1(f) is at least γ−1
2 times his contribution to lQ1(f),
i.e., to cl. So using (3.11), we get lQ1(f) > γ−1
2 cl > γ−12 (lQ1(f) − 2M(f∗)). Now (3.4) gives
lQ1(f) + ||Q1|| > γ−12 (lQ1(f)− 2M(f∗)), which, along with γ ≥ γ0 > 4, yields
lQ1(f) +||Q1||
2+||R||
2<
2(γ − 1)γ − 3
M(f∗) +γ + 1
2(γ − 3)||Q1||+ ||R||
2.
10

Therefore, according to (3.7) and (3.8), we have
M(f) ≤ 2(γ − 1)γ − 3
M(f∗) +γ − 2
2(γ − 3)||R||,
which, together with (3.9), leads to
M(f) ≤ 3γ − 2γ − 2
M(f∗) ≤ γ0M(f∗),
establishing the lemma. 2
Lemma 2 Given any SRR instance, either every optimal flow is a Nash flow, or the price of
anarchy of the instance is at most 4 + 2√
2 < 6.83.
Proof. If we replace lR(·) by laR(·) and || · || by || · ||a in our above discussions for the case of
homogeneous latency functions, then we have laR(f) ≤ 2γM(f∗)− (γ − 1)||R||a, which, together
with (3.6) and (3.2), gives an analogue to (3.9):
M(f) ≤ laR(f) + ||R||b + ||R||a2
≤ γM(f∗)− γ − 22
||R||a +12||R||b ≤ (γ +1)M(f∗)− γ − 2
2||R||a,(3.13)
where the first “≤” is obtained by noticing (3.2) and that
lR(f) = laR(f) + lbR(f) ≤ laR(f) + ||R||b. (3.14)
With the same replacement, inequality (3.12) still holds with the adjusted definition of γ. Hence
we get lQ1(f) ≥ la
Q1(f) > γ−1
2 cl ≥ γ−12 (laQ1
(f)− 2M(f∗)), which, together with (3.4) and (3.14),
leads to
lQ1(f) + ||Q1||a >γ − 1
2(laQ1
(f)− 2M(f∗)) ≥ γ − 12
(lQ1(f)− 2M(f∗)− ||R||b).
Therefore, according to (3.2), we have
lQ1(f) + ||Q1||a >γ − 1
2(lQ1(f)− 4M(f∗) + ||R||a),
which, together with (3.7) and (3.8) with || · || replaced by || · ||a, gives us the following:
M(f) ≤ 4(γ − 1)γ − 3
M(f∗)− γ
2(γ − 3)||R||a,
11

which, combined with (3.13), yields
M(f) ≤ max
γ + 1,4(γ − 1)γ − 3
M(f∗) ≤ (4 + 2
√2)M(f∗),
proving Lemma 2. 2
By the definitions of PoA and PoS, the combination of the above two lemmas implies The-
orem 1 immediately.
We conclude this section with better bounds 8/7 ≤ PoS ≤ PoA = 2 for the simplest SRR
that has only two non-cooperative users, for which we have the following result.
Theorem 2 The price of anarchy is 2 and the price of stability is at least 8/7 for the SRR
problem with k = 2 users.
Proof. Recall that the SRR instance with homogenous linear latency exhibited in Figure 2(b)
has PoA at least 2, and that the SRR instance given in Figure 2(c) has PoS equal to 8/7. By
(2.4), it suffices to show PoA ≤ 2.
Let f∗ = Q1, Q2 and f = Q′1, Q
′2 be an optimal flow and an arbitrary Nash flow,
respectively. We have
lf (Q′i) ≤ 2||Q′
i|| and lf (Q′i) ≤ laf (Q′
i) + ||Q′i|| ≤ 2||Q′
i||, for i = 1, 2. (3.15)
By symmetry, it suffices to distinguish among three cases.
Case 1: Q1 = Q′1 and Q2 = Q′
2. Clearly, M(f)/M(f∗) = 1.
Case 2: Q1 = Q′1 and Q2 = Q′
2. It follows from (3.15) that lf∗(Q1) = lf∗(Q′1) = laf (Q′
1) +
||Q′1|| ≥ lf (Q′
1) and lf∗(Q2) = lf∗(Q′2) ≥ ||Q′
2|| ≥ 12 lf (Q′
2). Hence lf (Q′i) ≤ 2M(f∗) holds for
i = 1, 2.
Case 3: Q1 = Q′1 and Q2 = Q′
2. Therefore lf∗(Qi) ≥ ||Q′i|| for i = 1, 2, which, together with
(3.15), implies lf (Q′i) ≤ 2M(f∗) for i = 1, 2.
Combining the three cases, we deduce from the arbitrariness of f that PoA ≤ 2 as desired.
2
4 Instability of the optimal
In this section we investigate how close an optimum flow could be to an equilibrium. In terms
of (α, β) approximation, we upper bound α while keeping β = 1.
Specifically, we will find an optimal flow that is a 54-approximate Nash flow. Roughly
speaking, to achieve this, we define two indices for every flow. Then beginning from an optimal
12

flow, we perform a number of iterations: in each iteration, we change strategies of at most two
users so that the resulting flow is optimal and has smaller indices. When we terminate at an
optimal flow f∗ with smallest indices, the optimal flow f∗ is proved to be a 54-approximate Nash
– if not, we should have further iteration to produce optimal flow with even smaller indices.
Let us elaborate the above high-level idea in detailed contradiction argument, and devote
the rest of the section to the proof of the following theorem.
Theorem 3 The SRR problem admits a (54, 1)-approximate Nash flow.
We may assume ae + be > 0 for all e ∈ E in view that shrink of e ∈ E with ae + be = 0 into
one node has no effect on our results. Let the optimal flow f∗ = Q1, Q2, . . . , Qk be taken such
that it has smallest indices, more precisely, the following (Min1) and (Min2) are satisfied:
(Min1) the set 〈f∗〉 = i : i ∈ 1, 2, . . . , k and lQi(f∗) = M(f∗) contains as few elements as
possible;
(Min2) subject to (Min1), the index τ(f∗) =∑
e∈E f∗e · le(f∗e ) is as small as possible.
We aim to show that f∗ is a (54, 1)-approximate Nash.
Suppose to the contrary that f∗ is not 54-approximate. We will deduce contradictions to
either (Min1) or (Min2), and therefore establish the theorem. Our proof is justification of a
series of claims that lead to our desired contradictions. First, since f∗ is not 54-approximate,
by (2.3) there exists i′ with 1 ≤ i′ ≤ k such that
lQi′ (f∗) > 54
∑
e∈E(Qi′ )
(ae(f∗e + 1) + be).
So for γ ≥ 18, by (2.2) we have
Claim 1 lQi′(f∗) ≤ ∑
e∈E(Qi′ )(ae(f∗e + 1) + be) = la
Qi′(f∗) + ||Qi′ || < 1
3γ lQi′ (f∗) ≤ 1
3γ M(f∗). 2
If E(Qi)∪E(Qj) = E and E(Qi)∩E(Qj) 6= ∅ for some 1 ≤ i ≤ j ≤ k, then by replacing Qi
with Qi and Qj with Qj , we obtain from f∗ a new flow f such that fe ≤ f∗e for all e ∈ E and at
least one of these inequalities is strict. It follows that f is also an optimal flow and additionally
τ(f) < τ(f∗), which contradicts our choice of f∗ according to (Min1) and (Min2). Therefore,
we have
Claim 2 For any 1 ≤ i, j ≤ k with E(Qi) ∩ E(Qj) 6= ∅, we have E(Qi) ∪ E(Qj) 6= E. 2
For any 1 ≤ i ≤ k, swapping si and ti if necessary, we suppose Qi = R[si, ti] is the clockwise
path in R from si to ti. Without loss of generality, let
13

(Max1) lQ1(f∗) = M(f∗) with |E(Q1)| maximized.
Observe that E(Q1)∩E(Qi′) 6= ∅, as otherwise Qi′ ⊇ Q1 and hence laQi′
(f∗)+ ||Qi′ || ≥ lQ1(f∗) =
M(f∗), which contradicts Claim 1. Without loss of generality, suppose that si′ ∈ R[s1, t1].
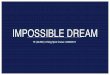
Consider flow f1 = Q1, Q2, . . . , Qk, which is obtained from f∗ by changing user 1’s strategy
(see Figures 3(a) and 3(b) for an illustration). We claim
Claim 3 lQ1(f∗) ≤ lQ1
(f1) = laQ1
(f∗) + ||Q1|| < 1γ M(f∗).
The first inequality follows directly from the definition of f1. We only need to justify the validity
of the second inequality. Recall that si′ ∈ R[s1, t1], we have
Q1 ⊆ Qi′ ∪ R[t1, ti′ ], (4.1)
where R[t1, ti′ ] = R[t1, ti′ ] if ti′ ∈ R[s1, t1] and = ∅ otherwise. Since
lQ1∩Qi′ (f∗) = lQ1(f
∗)− lQ1∩Qi′(f∗) ≥ lQ1(f
∗)− lQi′(f∗),
we have
||R[t1, ti′ ]|| ≤ lR[t1,ti′ ](f∗) = lQi′∩Q1
(f∗) = lQi′ (f∗)− lQ1∩Qi′ (f
∗)
≤ M(f∗)− lQ1(f∗) + lQi′
(f∗) = lQi′(f∗),
where the last equality is due to (Max1). Therefore, according to (4.1) and Claim 1,
laQ1(f∗) + ||Q1|| ≤ laQi′
(f∗) + ||Qi′ ||+ 2lR[t1,ti′ ](f∗) <
1γ
M(f∗),
as desired in the claim. 2
14

s2 Q2
s1
t1
t2
Q1
( )a = , ,..., f Q Q Q1 2 k* ( )b = , , , Q Q Qk1 2
s2 Q2
s1
t1
t2
Q1-
-( )c = , , , Q Q Q2 k1
s2Q2
s1
t1
t2
Q1-
-
-
-
s2
Q2
s1
t1
t2
Q1
s i
s j t i
t j
Qi-
Qj-
s2
Q2
s1
t1
t2
Q1
s i
t i
Qi--
( )e = , , , , Q Q1 2 Q i--
s2
Q2
s1
t1
t2
Q1
s j
t j
-Q j-
( )f = , , , , Q Q21 Q j--
f1 ... f
2 ...
... ... ... ...f4
f5( )d = , , , , , , Q Q1 2 Q Qi j
- -... ... ...f
3
Figure 3. Approximate Nash flows
By the optimality of f∗, we have M(f1) ≥ M(f∗). In view of Claim 3, we may assume
(Max2) lQ2(f1) = M(f1) ≥ M(f∗) with |E(Q2)| maximized.
It follows that E(Q1) ∩ E(Q2) 6= ∅ (otherwise Q1 ⊇ Q2 and lQ1(f1) ≥ lQ2(f1) ≥ M(f∗),
contradicting Claim 3), which, together with Claim 2, implies that Q2 intersects with both Q1
and Q1. We may assume, without loss of generality, that s2 ∈ R(s1, t1) and t2 ∈ R(t1, s1) (see
Figures 3(a) and 3(b) for an illustration). Then
lR[s2,t1](f1) = lQ2(f1)− lR[t1,t2](f1) ≥ M(f∗)− lQ1(f1) >
(1− 1
γ
)M(f∗),
where the last inequality is due to Claim 3. Therefore, we have
Claim 4 ||R[s1, s2]|| ≤ lR[s1,s2](f∗) = lQ1(f∗)− lR[s2,t1](f∗) ≤ M(f∗)− lR[s2,t1](f1) < 1
γ M(f∗).2
Claim 5 ||R[t2, s1]|| ≤ ||R[t1, s2]|| ≤ lQ1(f1) + ||R[s1, s2]|| < 2
γ M(f∗). 2
Claims 3 and 4 directly imply
Claim 6 lR[t1,s2](f∗) = lQ1(f∗) + lR[s1,s2](f∗) < 2
γ M(f∗).
15

Now obtain flow f2 = Q1, Q2, Q3, . . . , Qk from f1 by changing user 2’s strategy (see Figure
3(c)). It follows that lR[s1,s2](f2) = lR[s1,s2](f∗), and by Claims 3 and 4, we get
Claim 7 lQ1∪Q2(f2) = lR[t1,s2](f2) ≤ 2lQ1
(f1) + lR[s1,s2](f∗) < 3γ M(f∗). 2
Define Qs as the set of paths Qh in Q3, Q4, . . . , Qk satisfying
lQh(f∗) >
(1− 4
γ
)M(f∗) and R[s1, s2] ⊆ R(sh, th).
Similarly, define Qt as the set of paths Qh in Q3, Q4, . . . , Qk satisfying
lQh(f∗) >
(1− 4
γ
)M(f∗) and R[t1, t2] ⊆ R(sh, th).
We are to show that Qs ∪Qt 6= ∅. But first it is immediate from Claim 2 and the maximality
of |E(Q1)| and |E(Q2)| (stated in (Max1) and (Max2)) that
Claim 8 (i) t1, t2 6∈ Q for any Q ∈ Qs; (ii) s1, s2 6∈ Q for any Q ∈ Qt; and (iii) Qs ∩Qt = ∅.
To see (i), suppose to the contrary that some Qh ∈ Qs contains tg with g ∈ 1, 2. From
R[s1, s2] ⊆ R(sh, th), we see that neither s1 nor s2 is an end of Qh, i.e., s1, s2 ∩ sh, th = ∅,and that, depending on tg is at the top or the tail of Qh, either R[tg, s1] or R[s2, tg] is a subpath
of Qh. In the case of R[tg, s1] ⊆ Qh, we have E(Qh) ∪ E(Q2) = E, and Claim 2 enforces
E(Qh) ∩ E(Q2) = ∅, yielding sh = t2 and th = s2, a contradiction to s1, s2 ∩ sh, th = ∅. In
the case of R[s2, tg] ⊆ Qh, path Q1 chosen in (Max1) turns out to be a subpath of Qh, and
it follows from (Max1) that Qh = Q1, contradicting s1, s2 ∩ sh, th = ∅ again. Hence (i) is
established.
Statement (ii) can be proved by applying symmetric argument. Statement (iii) is instant
from Statements (i) and (ii). 2
The following is directly implied by Claim 6.
Claim 9 For any Q ∈ Qs ∪Qt, lQ∩R[s2,t1](f∗) ≥ lQ(f∗)− lR[t1,s2](f∗) > (1− 6γ )M(f∗). 2
Since maxlQ1(f2), lQ2
(f2) ≤ lQ1∪Q2(f2) < M(f∗) ≤ M(f2) as implied by Claim 7, we may
assume lQ`(f2) = M(f2) ≥ M(f∗) for some ` ∈ 3, 4, . . . , k. Note that le(f2) ≤ le(f∗) for
any link e on R[s1, t2] (see Figure 3(c)), we conclude: (a) Either s2 or t1 belongs to R(s`, t`) =
Q`\s`, t`. (b) Either s1 or t2 belongs to R(s`, t`). If at least one of the two statements were
not true, then we would have either (i) Q` ⊆ R[t1, s2] = Q1 ∪ Q2 or (ii) Q` ⊆ R[s1, t2]. However,
16

(i) together with Claim 7 leads to a contradiction lQ`(f2) ≤ lQ1∪Q2
(f2) < 3γ M(f∗). And (ii)
implies the optimality of f2 due to M(f2) = lQ`(f2) ≤ lQ`
(f∗) ≤ M(f∗), which contradicts our
choice of f∗ in (Min1): 〈f2〉 ⊆ 〈f∗〉 − 1 〈f∗〉.On the other hand, from Figure 3(c) we see with Claim 5 that
lQ`(f∗) +
4γ
M(f∗) > lQ`(f∗) + 2||R[t2, s1]|| ≥ lQ`
(f2) ≥ M(f∗),
which, together with statements (a) and (b) above, implies
Q` ∈ Qs ∪Qt ⇒ Qs ∪Qt 6= ∅.
When Qs 6= ∅, let Qi ∈ Qs be such that |E(R[si, s1])| is maximized. By definition of Qs and
Claim 8(i), si ∈ R(t2, s1] and ti ∈ R[s2, t1). When Qt 6= ∅, let Qj ∈ Qt be such that |E(R[t2, tj ])|is maximized. By definition of Qt and Claim 8(ii), sj ∈ R(s2, t1] and tj ∈ R[t2, s1). See Figure
3(d) for an illustration. Next we distinguish among three cases depending on Qs 6= ∅ 6= Qt,
Qs 6= ∅ = Qt or Qs = ∅ 6= Qt.
Case 1: Qs 6= ∅ 6= Qt. We deduce from Claim 9, γ ≥ 18, and (Max1) that
lR[s2,ti](f∗) + lR[sj ,t1](f
∗) = lQi∩R[s2,t1](f∗) + lQj∩R[s2,t1](f
∗)
> 2(
1− 6γ
)M(f∗) > M(f∗) = lQ1(f
∗) ≥ lR[s2,t1](f∗),
which implies sj ∈ R(s2, ti) and ti ∈ R(sj , t1), and hence tj ∈ R[t2, si) from Claim 2. Noticing
that Qi ∩ R[s2, t1] = R[s2, sj ] ∪ R[sj , ti] and Qj ∩ R[s2, t1] = R[sj , ti] ∪ R[ti, t1], it is clear from
Qi ∩Qj ∩R[s2, t1] = R[sj , ti] that
lR[s2,t1](f∗) + lR[sj ,ti](f
∗) = lQi∩R[s2,t1](f∗) + lQj∩R[s2,t1](f
∗),
which, together with Claim 9, gives
lR[sj ,ti](f∗) > 2
(1− 6
γ
)M(f∗)− lR[sj ,ti](f
∗).
Now we conclude from R[sj , ti] ⊆ Q1 and (Max1) that
lR[sj ,ti](f∗) > 2
(1− 6
γ
)M(f∗)− lQ1(f
∗) =(
1− 12γ
)M(f∗) ≥ 6
γM(f∗), (4.2)
17

where the last inequality uses the assumption γ ≥ 18. Let flow f3 = Q1, Q2, . . . , Qi, . . . , Qj , . . .be obtained from f∗ by changing the strategies of users i and j (see Figure 3(d)). It is routine
to check that
(f3)e =
f∗e for e ∈ E(R[si, sj ]) ∪ E(R[ti, tj ]),f∗e − 2 for e ∈ E(R[sj , ti]),f∗e + 2 for e ∈ E(R[tj , si]).
(4.3)
We show that
maxlQi(f3), lQj
(f3) < M(f∗). (4.4)
In fact, it is easy to see from the definition of f3 (see Figure 3(d)) that R[t1, si] ⊆ R[t1, s1] =
Q1 and hence lR[t1,si](f3) ≤ 2lQ1(f1). Then, noticing that R[ti, t1] ⊆ R[s2, t2]\R[s2, ti] and
R[s2, ti] = Qi ∩R[s2, t1], we obtain
lQi(f3) = lR[ti,t1](f
∗) + lR[t1,si](f3)
≤ lR[s2,t2](f∗)− lQi∩R[s2,t1](f
∗) + 2lQ1(f1)
≤ M(f∗)−(
1− 6γ
)M(f∗) +
2γ
M(f∗) =8γ
M(f∗),
where the last inequality is based on Claims 9 and 3. Similarly, since R[tj , s2] ⊆ R[t2, s2] =
Q2 and hence lR[tj ,s2](f3) ≤ 2lQ2(f2). Then, noticing that R[s2, sj ] ⊆ R[s2, t2]\R[sj , t1] and
R[sj , t1] = Qj ∩R[s2, t1], we obtain
lQj(f3) = lR[s2,sj ](f
∗) + lR[tj ,s2](f3)
≤ lR[s2,t2](f∗)− lQj∩R[s2,t1](f
∗) + 2lQ2(f2)
≤ M(f∗)−(
1− 6γ
)M(f∗) +
6γ
M(f∗) =12γ
M(f∗),
where the last inequality is based on Claims 9 and 7. Therefore, (4.4) is established. Now let
us prove the following final claim.
Claim 10 E(Q) ∩ E(R[tj , si]) = ∅ for all Q ∈ f3 with lQ(f3) = M(f3).
To see this, let us consider arbitrary Q ∈ f3 with lQ(f3) = M(f3) ≥ M(f∗). We have Q 6∈Qi, Qj by (4.4). From Claim 5 and (4.3), we have
lQ(f∗) +4γ
M(f∗) > lQ(f∗) + 2||R[t2, s1]||
≥ lQ(f∗) + 2||R[tj , si]|| ≥ lQ(f3) ≥ M(f∗).
18

Suppose to the contrary that E(Q) ∩ E(R[tj , si]) 6= ∅. From Claims 6 and 5 we obtain
lR[t1,s2](f3) ≤ lR[t1,s2](f∗) + 2||R[tj , si]||
≤ lR[t1,s2](f∗) + 2||R[t2, s1]|| < 6
γM(f∗),
which implies that Q * R[t1, s2] and hence either Q ⊇ R[s1, s2] or Q ⊇ R[t1, t2]. Therefore,
Q ∈ Qs ∪Qt. However, the facts that Q 6∈ Qi, Qj and Q ∩ E(R[tj , si]) 6= ∅ contradict one of
our two earlier choices of Qi and Qj with the maximality of |E(R[si, s1])| and the maximality
of |E(R[t2, tj ])|. Hence the above claim is justified. 2
In consequence, we deduce from (4.3) that
M(f3) ≤ M(f∗) implies that f3 is an optimal flow, and 〈f3〉 ⊆ 〈f∗〉, (4.5)
and
τ(f∗)− τ(f3)
=∑
e∈E(R[sj ,ti])
[f∗e · le(f∗e )− (f∗e − 2)le(f∗e − 2)] +∑
e∈E(R[tj ,si])
[f∗e · le(f∗e )− (f∗e + 2)le(f∗e + 2)]
≥∑
e∈E(R[sj ,ti])
2le(f∗e )−∑
e∈E(R[tj,si])
f∗e =0
2(2ae + be) +∑
e∈E(R[tj ,si])
f∗e >0
[f∗e · le(f∗e )− (f∗e + 2)le(f∗e + 2)]
= 2lR[sj ,ti](f∗)−
∑
e∈E(R[tj ,si])
f∗e =0
2(2ae + be) +∑
e∈E(R[tj ,si])
f∗e >0
[f∗e · le(f∗e )− (f∗e + 2)(le(f∗e ) + 2ae)]
= 2lR[sj ,ti](f∗)−
∑
e∈E(R[tj ,si])
f∗e =0
2(2ae + be)−∑
e∈E(R[tj ,si])
f∗e >0
[2f∗e ae + 2le(f∗e ) + 4ae]
≥ 2lR[sj ,ti](f∗)−
∑
e∈E(R[tj,si])
4(ae + be)−∑
e∈E(R[tj ,si]),f∗e >0
4le(f∗e )
≥ 2lR[sj ,ti](f∗)− 4||R[tj , si]|| − 4lR[tj ,si](f
∗)
≥ 2lR[sj ,ti](f∗)− 4||R[t2, s1]|| − 4lQ1
(f∗)
Using (4.2), Claims 5 and 3, we get τ(f∗) − τ(f3) > 0, which, in combination with (4.5), gives
a contradiction to (Min2).
19

Case 2: Qs 6= ∅ = Qt. In this case, we derive flow f4 = Q1, Q2, . . . , Qi, . . . from f∗ by
changing the strategies of users 2 and i (See Figure 3(e)). Similar to (4.3), we get
f4e =
f∗e for e ∈ E(R[si, s2]) ∪ E(R[ti, t2]),f∗e − 2 for e ∈ E(R[s2, ti]),f∗e + 2 for e ∈ E(R[t2, si]).
From Claims 7 and 9, it follows that
lQ2(f4) ≤ lQ2∪Q1
(f2) <3γ
M(f∗),
lQi(f4) = lR[ti,t1](f
∗) + lR[t1,si](f4) ≤ 6γ
M(f∗) + lQ1(f2) ≤ 9
γM(f∗),
and subsequently, the arguments in Case 1 apply with subscript 3 replaced by 4 and subscript
j replaced by 2, yielding M(f4) ≤ M(f∗), 〈f4〉 ⊆ 〈f∗〉 and
τ(f∗)− τ(f4) ≥ 2lR[s2,ti](f∗)− 4||R[t2, si]|| − 4lQ1
(f∗).
By Claims 9, 5, and 3, we obtain τ(f∗) − τ(f4) > 2(1− 6
γ
)M(f∗) − 8
γ M(f∗) − 4γ M(f∗) ≥ 0
giving τ(f∗) > τ(f4) a contradiction to (Min2).
Case 3: Qs = ∅ 6= Qt. In this case, we derive flow f5 = Q1, Q2, . . . , Qj , . . . from f∗ by
changing strategies of users 1 and j (See Figure 3(f)). Then f5e = f∗e for all e ∈ E(R[t1, tj ]) ∪E(R[s1, sj ]), f5e = f∗e − 2 for all e ∈ E(R[sj , t1]), and f5e = f∗e + 2 for all e ∈ E(R[tj , s1]).
Furthermore, lQ1(f5) ≤ lQ1
(f2) < 3γ M(f∗) by Claim 7, and the subsequent arguments go as
in Case 1 with subscript 3 replaced by 5 and subscript i replaced by 1. Finally we reach a
contradiction to (Min2) given by M(f5) ≤ M(f∗), 〈f5〉 ⊆ 〈f∗〉 and τ(f∗)− τ(f5) > 0.
To summarize, the contradictions in the above three cases show that our contradiction as-
sumption is false. Hence f∗ is a (54, 1)-approximate Nash flow, giving the conclusion of Theo-
rem 3.
5 Algorithmic consequences
Now we discuss briefly how to compute an (α, β)-approximate Nash flow for the SRR problem
such that α and β are small, in order to guarantee the stability and efficiency of the flow, and to
make the flow a satisfactory initial solution of the SRR network game as expected by network
designers.
20

Finding near optimal flow in polynomial time
In order to obtain a good social solution to the SRR problem efficiently, we resort to its split-
table counterpart, the splittable selfish ring routing with linear latency (SSRR), by relaxing the
unsplittable constraint f ∈ 0, 1P to splittable one: f ∈ [0, 1]P , and f(Pi) + f(Pi) = 1 for
i = 1, 2, . . . , k. Since the latency is linear, lP (f) can be expressed as a linear combination of
xi = f(Pi), i = 1, 2, . . . , k, finding an optimal solution to the SSRR amounts to solving the
following linear program: Minimize y subject to
∑
e∈E(P )
ae
( ∑
1≤j≤k:E(Pj)3e
xj +∑
1≤j≤k:E(Pj)3e
(1− xj))
+ be ≤ y
for P ∈ Pi, Pi, i = 1, 2, . . . , k. In polynomial time we can obtain an optimal solution (x∗1, x∗2, . . . , x
∗k, y
∗)
to the above linear program and, therefore, an optimal flow f∗ ∈ [0, 1]P to the SSRR with
f∗(Pi) = x∗i , i = 1, 2, . . . , k, and M(f∗) = y∗. We round f∗ to a feasible atomic unsplittable
flow f ∈ 0, 1P for the SRR problem in such a way that f(Pi) = 1 iff f(Pi) = x∗i ≥ 0.5,
i = 1, 2, . . . , k. It is evident that
M(f) ≤ 2y∗ ≤ 2OPT. (5.1)
Finding good Nash in pseudo-polynomial time
If f obtained above is not a Nash flow, we iteratively change the strategy of a user to re-
duce the latency he experiences in the current solution and, as easily verified with the po-
tential function technique [17, 15], we finally reach a Nash flow f with M(f) ≤ M(f) in time
O(k3n2 maxni=1aei +bei) and in time O(k3n2) when latency all equal to loads (see also Theorem
1 in [12]).
Corollary 4 The feasible flow f for the SRR problem computed as above is a (1, β)-approximate
Nash flow with β ≤ 13.66 and β ≤ 9.13 if the linear latency functions are homogenous.
Proof. If f is a Nash, then it is apparent that β = 2. Otherwise, apply verbatim the arguments
in Section 3 with f in place of f∗. It follows from (5.1) that β can be no more than twice the
PoA stated in Lemmas 1 and 2. 2
Reducing instability of near optimal flow
The proof of Theorem 3 suggests a pseudo-polynomial time approach to “stabilizing” a given
optimal flow f∗ iteratively – changing the strategy of one user or the strategies of two users
21

simultaneously in each iteration such that either fewer users suffer from the maximum latency
OPT or the resulting flow has smaller index τ (cf. (Min1) and (Min2) in the proof of Theorem 3).
This approach works on f , which is considered a substitute for f∗, and provides a 54-approximate
Nash flow f whose maximum latency M(f) equals M(f). In consequence, (5.1) asserts that f
is a (54, 2)-approximate Nash flow.
To summarize, (α, β)-approximate Nash flow in any given SRR can be constructed in pseudo-
polynomial time for (α, β) = (1, 13.66) and (α, β) = (54, 2), and for (α, β) = (1, 9.13) for
homogenous linear latency.
6 Concluding remarks
Positive results established in this paper, particularly in Lemma 1, Lemma 2, and Theorem
3, provide us with (α, β)-approximate Nash equilibria for unsplittable selfish ring routing with
linear latency. In addition to much room for improvement on bounding α and β, quantitive
relations between these two bounds deserve further research efforts. In this paper we have
focused on undirected selfish ring routing, challenging issues in its directed counterpart require
more and deeper insights into the interplay of users’ selfish behaviors and directed ring latency.
Regarding nonatomic/atomic splittable selfish ring routing, it would be tempting to extend
our methodology for the atomic unsplittable setting to derive similar results, although the con-
tinuous version is more complex than its discrete counterpart.
Roughgarden and Tardos [19] prove that, for general continuous and nondecreasing latency
functions, the “average latency” of the routes chosen by selfish network users is no more than the
“average latency” incurred by optimally routing twice as much traffic. It would be interesting to
see if some analogue (with “maximum latency” in place of “average latency”) exists for weighted
selfish ring routing to minimize maximum latency.
References
[1] A. Aggarwal, A. Bar-Noy, D. Coppersmith, R. Ramaswami, B. Schieber, and M. Sudan,
Efficient routing and scheduling algorithms for optical networks, Proceedings of the 5th
annual ACM-SIAM Symposium on Discrete Algorithms, 1994, 412–423.
[2] E. Anshelevich, A. Dasgupta, J. Kleinberg, E. Tardos, T. Wexler, and T. Roughgarden,
The price of stability for network design with fair cost allocation, Proceedings of the 45th
annual Symposium on Foundations of Computer Science, 2004, 295–304.
22

[3] B. Awerbuch, Y. Azar, and L. Epstein, The price of routing unsplittable flow, Proceedings
of the 37th annual ACM Symposium on Theory of Computing, 2005, 57–66.
[4] A. Blum, A. Kalai, and J. Kleinberg, Addmission control to minimize rejections, Lecture
Notes in Computer Science, 2152 (2001) 155–164.
[5] C. Busch and M. Magdon-Ismail, Atomic routing games on maximum congestion, Lecture
Notes in Computer Science, 4041 (2006) 79–91.
[6] G. Christodoulou and E. Koutsoupias, The price of anarchy of finite congestion games,
Proceedings of the 37th annual ACM Symposium on Theory of Computing, 2005, 67–73.
[7] R. Cominetti, J. R. Correa, and N. E. Stier-Moses, Network games with atomic players,
Lecture Notes in Computer Science, 4051 (2006) 525–536.
[8] J. R. Correa, A. S. Schulz, and N. E. Stier-Moses, Fast, fair, and efficient flows in networks,
Oprerations Research, 55 (2007) 215–225.
[9] A. Czumaj, Selfish routing on the Internet, in Handbook of Scheduling: Algorithms, Mod-
els, and Performance Analysis, Chapman & Hall/CRC Computer and Information Science
Series (J. Leung, ed.), Vol. 1, chapter 42, CRC Press, Boca Raton, FL, 2004.
[10] A. Fabrikant, C. Papadimitriou, and K. Talwar, The complexity of pure Nash equilibria,
Proceedings of the 36th annual ACM Syposimum on Theory of Computing, 2004, 604–612.
[11] R. Feldmann, M. Gairing, T. Lucking, B. Monien, and M. Rode, Nashification and the
coordination ratio for a selfish routing game, Lecture Notes in Computer Science, 2719
(2003) 514–526.
[12] D. Fotakisa, S. Kontogiannisa, and P. Spirakis, Selfish unsplittable flows, Theoretical Com-
puter Sciences, 348 (2005) 226–239.
[13] S. Kontogiannis and P. Spirakis, Atomic selfish routing in networks: a survey, Lecture Notes
in Computer Science, 3828 (2005) 989–1002.
[14] E. Koutsoupias and C. H. Papadimitriou, Worst-case equilibria, Lecture Notes in Computer
Science, 1563 (1999) 404–413.
[15] D. Monderer and L. Shapley, Potential games, Game and Economic Behavior, 14 (1996)
124–143.
[16] H. Lin, T. Roughgarden, E. Tardos and A. Walkover, Braess’s paradox, Fibonacci Numbers,
and exponential inapproximability, Lecture Notes in Computer Science, 3580 2005, 497–
512.
[17] R.W. Rosenthal, A class of games possessing pure-strategy Nash equilibira, International
Jouranl of Game Theory, 2 (1973) 65–67.
23

[18] T. Roughgarden, The price of anarchy is independent of the network topology, Jouranl of
Computer and System Sciences, 67 (2003) 342–364.
[19] T. Roughgarden and E. Tardos, How bad is selfish routing? Journal of the ACM, 49 (2002)
236–259.
[20] A. Schrijver, P. Seymour, and P. Winkler, The ring loading problem SIAM Journal on
Discrete Mathematics, 11 (1998) 1–14.
[21] D. Weitz, The price of anarchy, Unpublished manuscript, 2001.
[22] G. Wilfong and P. Winkler, Ring routing and wavelength translation, Proceedings of the
9th annual ACM-SIAM Symposium on Discrete Algorithms, 1998, 333–341.
24









![Utilizing Public Blockchains for the Sybil-Resistant ...Anonymity networks, such as Tor [16], enable low-latency and anonymous Internet communication through onion routing, i.e., tunneling](https://img.pdfslide.us/doc/110x75/5f2cc6a635461b775856a676/utilizing-public-blockchains-for-the-sybil-resistant-anonymity-networks-such.jpg)