Embed Size (px)
Citation preview

The ORESTEIA Attentional AgentStathis KasderidisDepartment of Mathematics, King’s College, Strand, London WC2R 2LS, UK

CONTENTS
Requirements Agent structure Agent function Attention Control State Evaluation Rules Computational model Artefacts Example Runtime

Requirements
Scalability (+ combinatorial explosion) Advanced self-management and
robustness mechanisms (graceful degradation of performance)
Support for emergent behaviour and ad-hoc configurations
Adaptation to the user Transparent access to resources and
common monitoring strategies

Agent structure Distributed entity with four layers:
L1: Sensors L2: Pre-processing L3: Local decision L4: Global decision

Agent function
Four main sub-systems: Attention Control
Local (Sensor monitoring, Detection of irregular behaviour)
Global (Competition) State Evaluation
Includes learning Decision-making (Rules) Computational Model

Attention Control

State Evaluation

Attention Control and State Evaluation

Rules

Computational Model

Artefacts: L3
The Level 3 Architecture:

Artefacts: L4
The Level 4 Architecture:

Effective Flow

Example: Driving and Hazard Avoidance LEVEL 1:
Class A: Physiological Sensors. 1. Skin Temperature 2. Heart Rate. (Substituted or Augmented by a full ECG sensor). 3. Respiration sensor. Considered for future inclusion. 4. Galvanic Skin Response. Considered for future inclusion.
Class B: Environmental Sensors. 1. Temperature. 2. Visibility. 3. Humidity. Considered for future inclusion. 4. Ambient Light. Considered for future inclusion.

Example II Class C: Car Sensors. 1. Speed vector sensor. 2. Acceleration vector sensor. 3. Breaking Force vector sensor. 4. Thrust Force vector sensor. 5. Friction vector sensor. 6. Steering wheel angle sensor. 7. Friction coefficient sensor. 8. Heading vector sensor.
Class D: Proximity Sensors. 1. ‘Object’ position vector sensor. 2. ‘Object’ speed vector sensor. 3. Number of ‘Objects’ in distance R (either radius or ahead/behind cone).

Example III
LEVEL 2: Same number as participating sensors. 1-1 relationship.
LEVEL 3: Class E: Biometric Artefact Class F: Environmental Status Artefact Class G: Car State Artefact. Class H: Threats Artefact.
LEVEL 4: Class I: Hazard Avoidance.
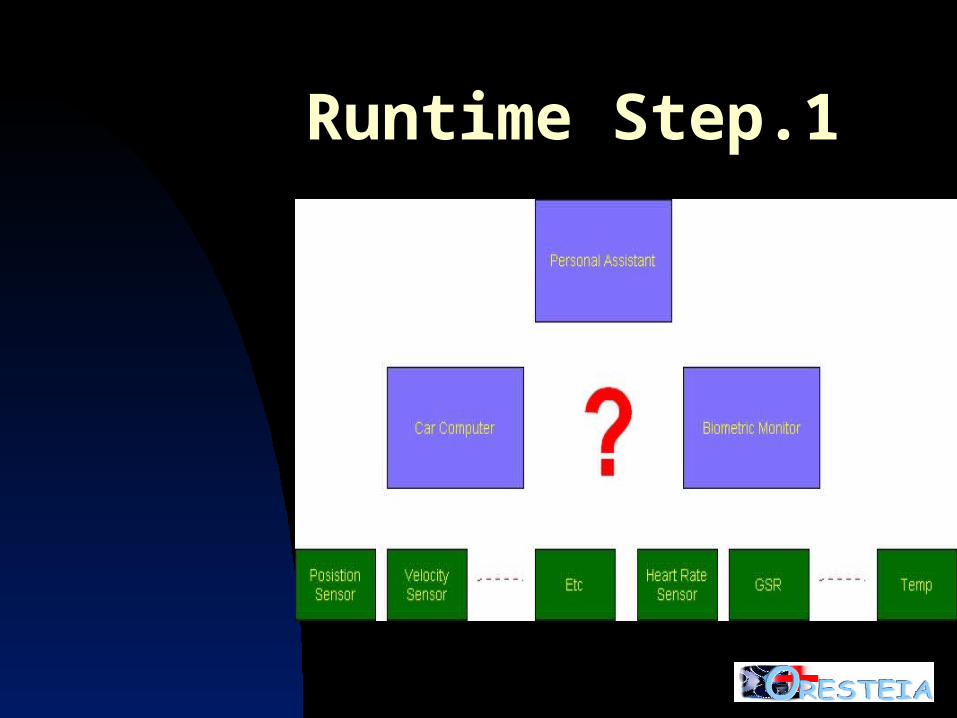
Runtime Step.1

Runtime Step.2

Runtime Step.3

Runtime Step.4

Runtime Step.5: Evaluate

Runtime Step.6: Attention

Runtime Step.7: ACT

Runtime Step 8: Summary
Biometric [Health Monitor] State: HR, “Takens” embedding Monitor: D=||State-Predicted|| (+HT) Classifier: Hstatus {OK, ASeek, Dang} ATTNInd=1-Prob(D>T) ATTN: Priority Queue, Dispatch: First Observer: NN, 3-2-1, Rules: “Notify physician/Warn” Handler: “Change sampling rate”

Runtime Step.8: Summary
Car computer [Proximity Monitor] State: P,V,A,T,B,H Cartesian Monitor: D=||State-Predicted||2 (+HT) Classifier: Pstatus {Rep,Warn,Dang} ATTInd=exp(-CollTime/CharTime) ATTN: Priority Queue, Dispatch: First Observer: Linear interpolation (2) Rules: “Warn driver” Handler: “Take control if limit passed”

Runtime Step.8: Summary
Personal Assistant [Hazard Avoidance, Drive Fast] State: {Bstatus, Pstatus} Cartesian Monitor: History Trace Classifier: Status {OK,Aseek, Dang,
Coll1,Coll2,Dang+Coll1,Dang+Coll2} ATTNInd=(wHA+ABIO+APRX)/3 Rules: NOP Handler: “Take control of the car and
stop”

Runtime Step.9: Miscellaneous Competition / Cooperation 2-D execution space: {Computational,
Action} Computational: Time sharing Action: Exclusive access / Sharing
OBSERVER Goal Further requirements from learning Further refinement of goal categories Executive

Information Flow
![Benjamin Doyon arXiv:1711.04568v3 [math-ph] 14 Aug 2018 · Benjamin Doyon Department of Mathematics, King’s College London, Strand, London WC2R 2LS, U.K. Using the theory of generalized](https://img.pdfslide.us/doc/110x75/605bc260732ab6666c60b91b/benjamin-doyon-arxiv171104568v3-math-ph-14-aug-2018-benjamin-doyon-department.jpg)




























