Embed Size (px)
DESCRIPTION
The NJIT Robot Assisted Virtual Rehabilitation System. Laurie Roberts. Cerebral Palsy (CP). Non progressive motor condition that causes physical disabilities in human development Caused by damage to the motor control centers during : Pregnancy – (75%) Childbirth – (5%) - PowerPoint PPT Presentation
Citation preview

Laurie Roberts

Non progressive motor condition that causes physical disabilities in human development
Caused by damage to the motor control centers during:◦ Pregnancy – (75%)◦ Childbirth – (5%)◦ After Birth – up to age 3 – (15%)
Out of 1000 newborns, 2 to 3 are diagnosed with CP
Hemiplegia occurs in 1 out of every 3 patients diagnosed with CP

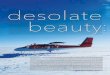
The NJIT-RAVR system integrates virtual reality with robot assisted rehabilitation
The rehabilitation of upper extremity impairments and function of children with Hemiparetic CP

Creates an interactive, motivating environment in which the therapist can manipulate the practice intensity and feedback to individualize the treatments.
Enables age appropriate play and a sense of self-efficiency which results in the desire of the children to participate more

Requires a moderately high level of motor function to interact with the VR systems
Using an adaptive robotic system in combination with the virtual environment may broaden the group of people that can use VR for rehabilitation

Splints are chosen for each subject by their therapist in order to allow for the highest degree of freedom and movement while minimizing abnormal movement patterns
The movement arm acts as an interface between the participant and the virtual environment.
External force, end-point position and velocity are measured in 3D in real time to generate reactive motion

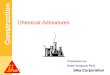
The Bubble Explosion◦ Speed and accuracy of shoulder and elbow movement during
point to point reaching movements
The Cup Reach◦ General upper extremity strength and reaching accuracy
Falling Objects◦ Upper extremity reaching towards a moving object

Hammer◦ Forearm pronation and supination during shoulder flexion
and elbow extension in 3D Space
Car Race

Two children – female (7) male (10) Cerebral Palsy and Spastic Hemiplegia
Used the RAVR system for one hour, 3 days a week for 3 weeks◦ Average of 23 minutes of activity per 1 hr session
Clinical Tests were performed prior to and immediately following the training period

The games, in general, held the participants’ attention for the entire 60 min session◦ Bubble Explosion and Car Race were preferred◦ Neither described the ‘Hammer’ Activity as fun
and didn’t agree to practice it in the future.




http://www.jneuroengrehab.com/content/6/1/40
http://en.wikipedia.org/wiki/Cerebral_palsy
http://www.webmd.com/brain/understanding-cerebral-palsy-basic-information
http://www.brainandspinalcord.org/cerebral-palsy/types/spastic-hemiplegia.html