Embed Size (px)
Citation preview
1
The new Synchrotron Optomechanics at BESSY
Tino NollBESSY GmbH
Albert-Einstein-Strasse 15, D-12489 [email protected]
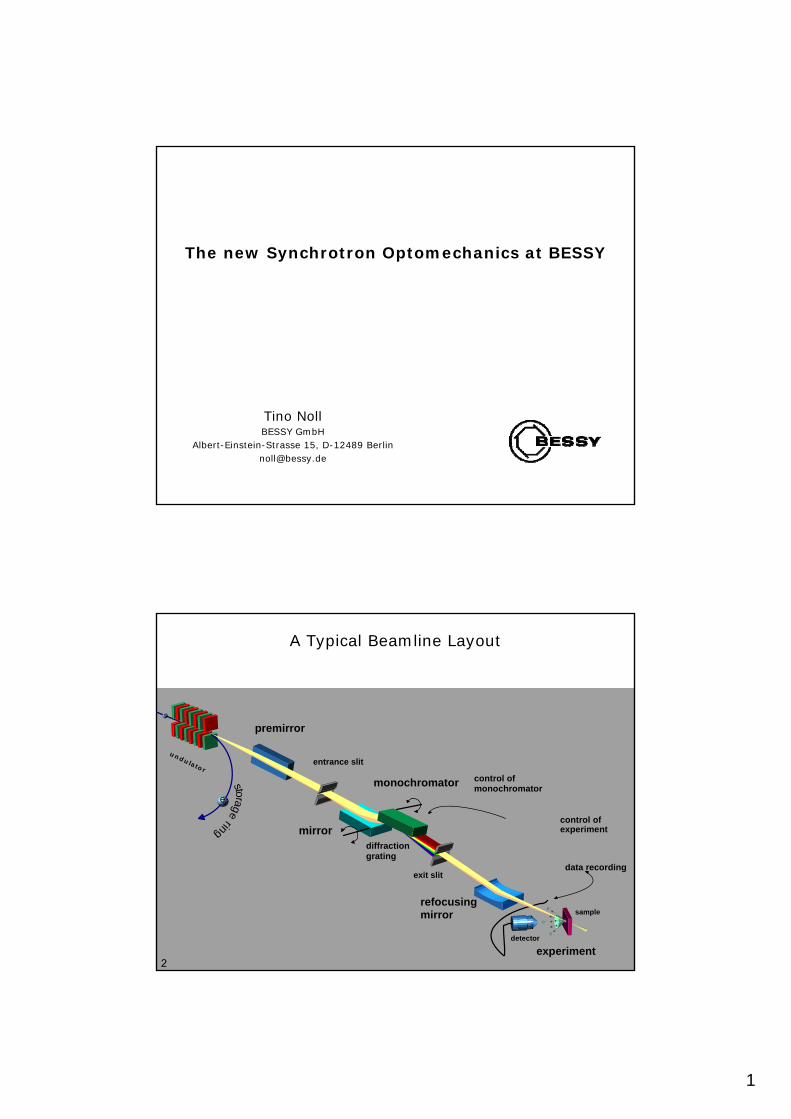
A Typical Beamline Layout
storage ring
u n d u la to r
premirror
refocusing mirror
monochromator
mirror
entrance slit
exit slit
experimentdetector
e-
control of experiment
data recording
control of monochromator
sample
e
e
e-
e-
diffractiongrating
2
2
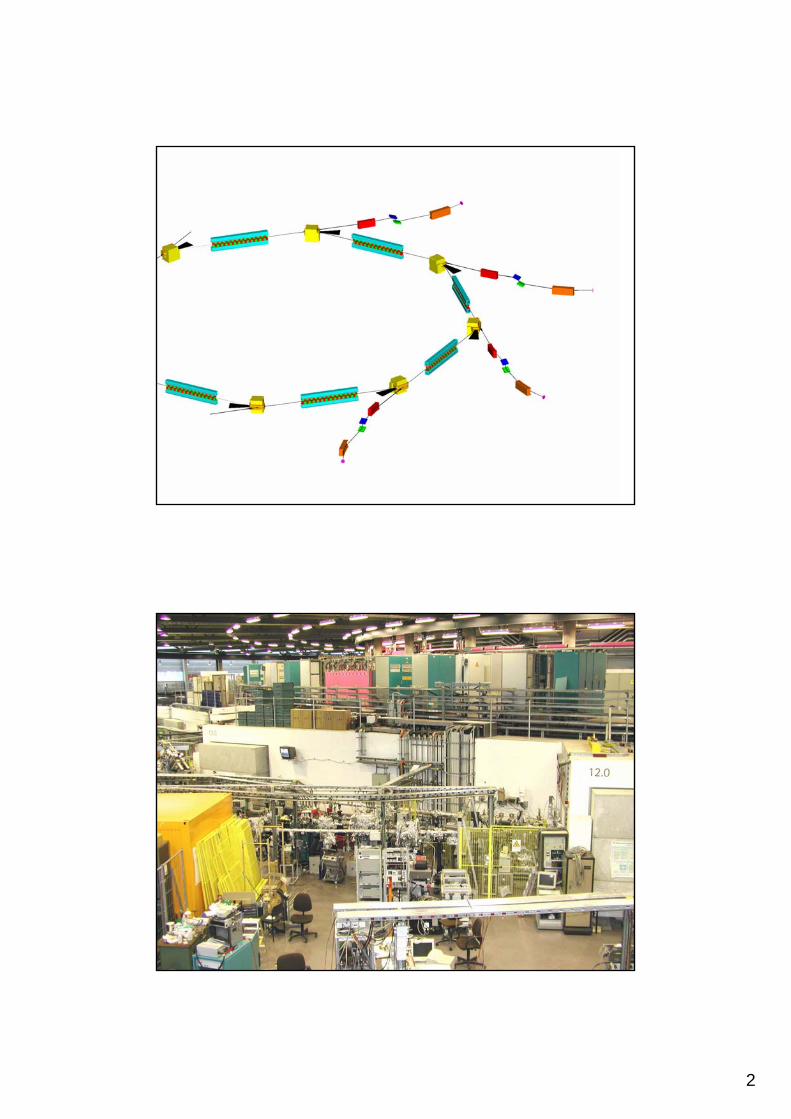
Electron Storage Ring with Beamlines
premirror
refocussing mirrorexperiment
monochromator
storage ring
3
Beamlines
4
SMU
Dip-M1

3
insertion device
premirror
aperturemirror
grating
mirror
aperture
experimentdipole magnet
l4
l2
l3
l1
ca 17 m
ca 16 bis 30 m
• Degree of freedom?
• Stroke?
• Step resolution?
• Acceptable error motions?
• Acceptable modes of vibrations?
mfe μ3...1≈
ξΔ⋅⎟⎠
⎞⎜⎝
⎛= ∑=
sin1
n
aae lf
Requirements of Accuracy of Movement of a Mirror (SMU)
moving direction stroke reproducibility resolution
rotation X 2,4 mrad 10 nrad 10 nrad
translation X 2 mm 1 µm 0.06 µm
rotation Y 4.3 mrad 50 µrad 0,3 µrad
translation Y 50 mm 5 µm 1.5 µm
rotation Z 9 mrad 25 µrad 0,3 µrad
translation Z - - -
x
zy

4
Kinematic Couplings
Reproducibility: linear 1μm, angular ?
7ll1
Δ Δ1
α
l
8

5
Random Error Motions
α
ms μ3...1≈Δ
mddd μ121 ≈−=Δ
),( sdf ΔΔ
d2
d1
error of straightnessdriving error
error of straightness
yaw
roll
One Motion and five Error Motions

6
Accuracy of Commercial Linear Roller Bearings
12
7
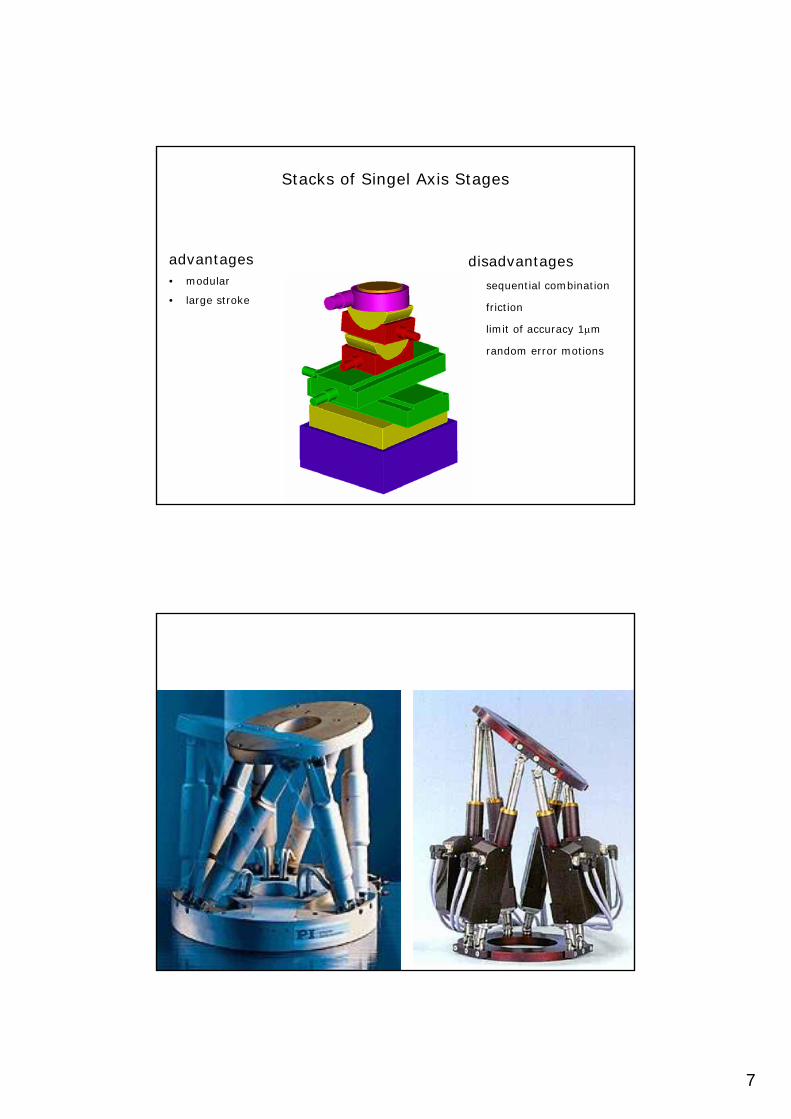
Stacks of Singel Axis Stages
advantages• modular
• large stroke
disadvantages
• sequential combination
• friction
• limit of accuracy 1μm
• random error motions
14
8
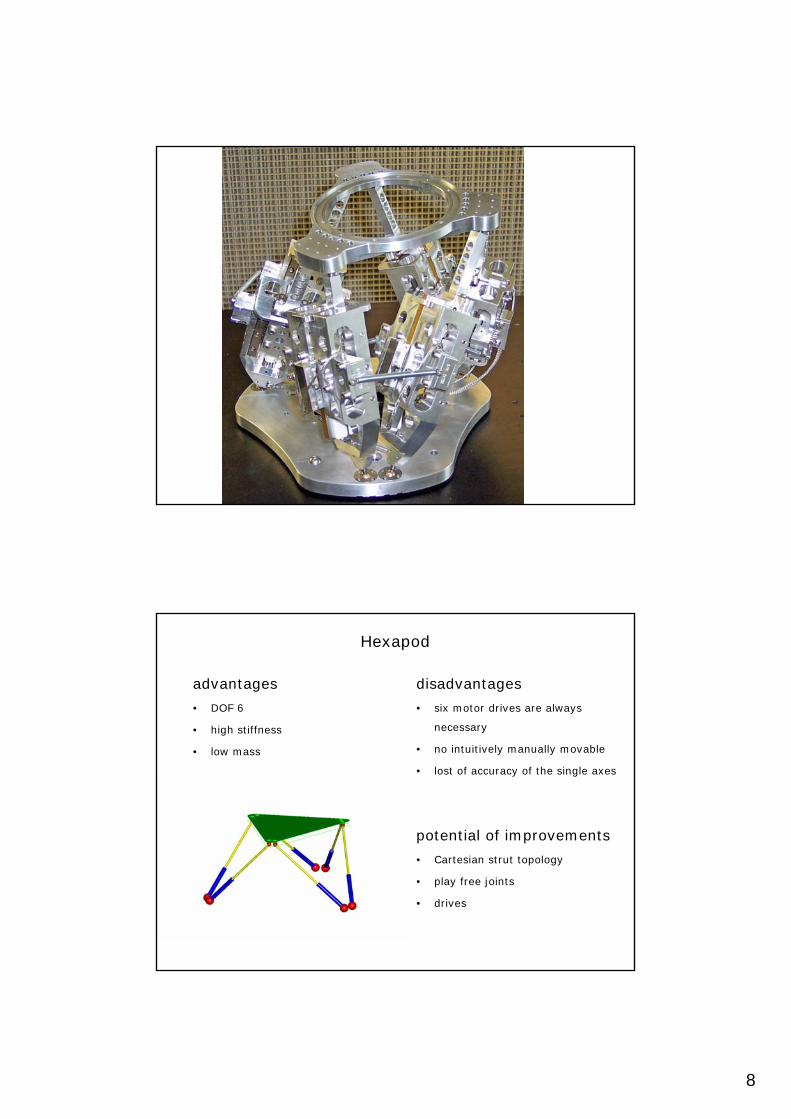
Hexapod
advantages
• DOF 6
• high stiffness
• low mass
disadvantages
• six motor drives are always
necessary
• no intuitively manually movable
• lost of accuracy of the single axes
potential of improvements
• Cartesian strut topology
• play free joints
• drives

9
Parallelogram
17
Rotational Pattern of Double Joined Struts
18

10
Segments of a Rotational Strut Pattern
19
Parallelogram Stage
20
Trapezoid Stage

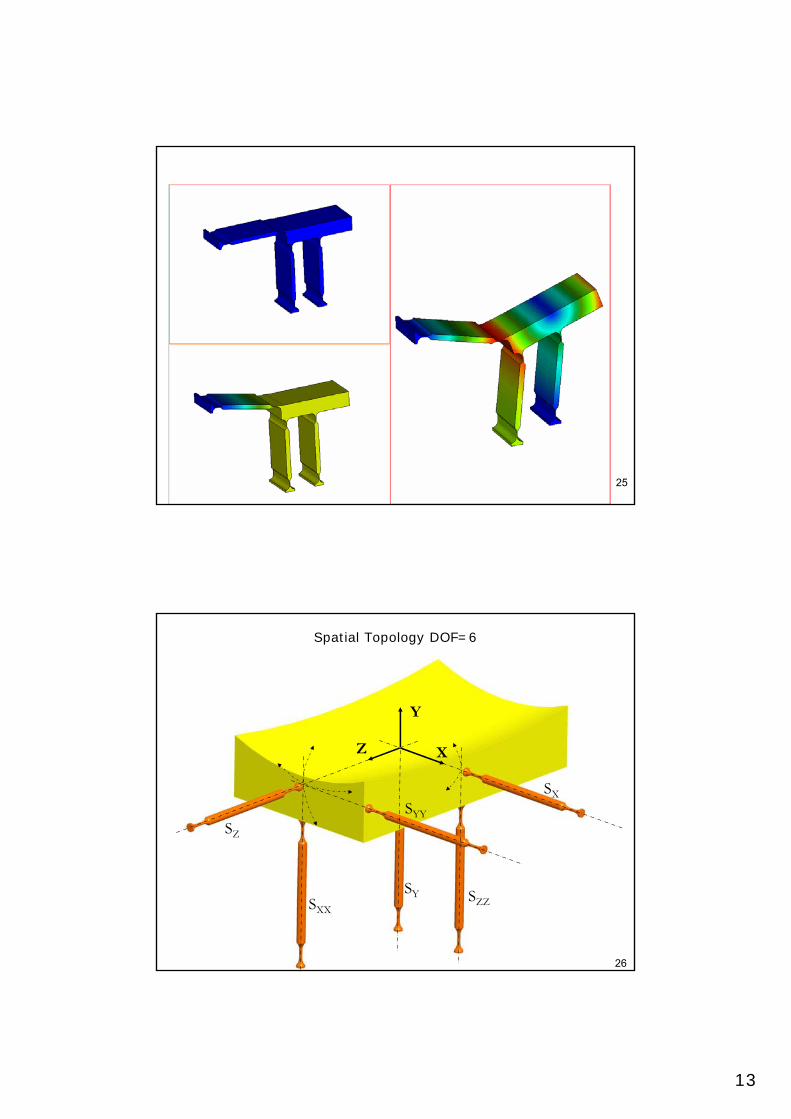
11
Strut Sxx
yx zStrut Sz
Strut Sy
Combination of a Parallelogram with a Trapezoid
DOF 3
Translation in Z-Direction
xy
z

12
Translation in Y-Direction
x y z
Rotation around X
x y z
13
25
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX
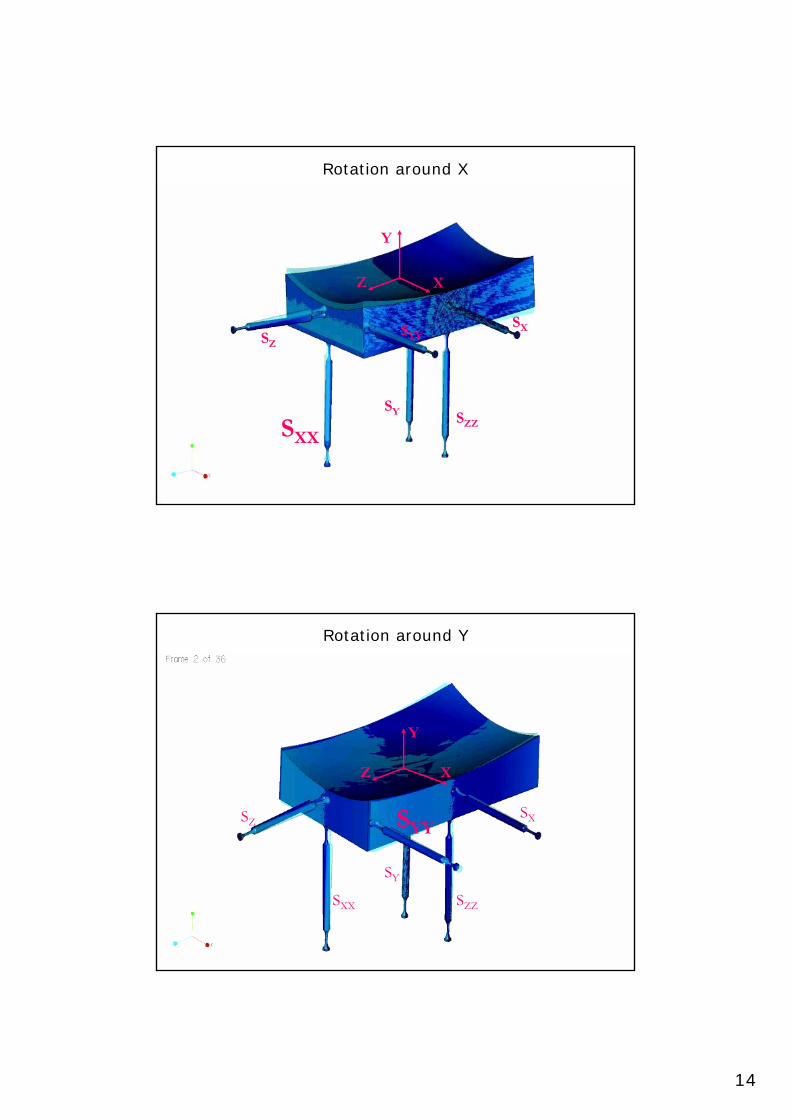
Spatial Topology DOF=6
26
14
Rotation around X
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX
Rotation around Y
X
Y
Z
SZ
SXX
SYY
SY
SZZ
SX

15
Rotation around Z
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX
Translation in X-Direction
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX

16
Translation in Y-Direction
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX
Translation in Z-Direction
X
Y
Z
SZ
SXX
SYY
SY SZZ
SX

17
33

18
36

19
37
38

20
39
Undulator
Dipole Magnet
Dipole Beam
Monochromator A
Refocussing Mirror A
Experiment A Experiment B
Refocussing Mirror B
Monochromator B
Switching Mirror Unit
Undulator-Beam
40

21
41

22

23
24

25

26
27

28
zwei Drehungen um Achsen, die in der Spiegeloberfläche liegen
55
56

29
57
58

30





























