Embed Size (px)
Citation preview

Neuro-IT workshop – Bonn 22 June, 2004
The NEUROBIT projectThe NEUROBIT projectA bioartificial brain with an artificial body: training a cultured neural tissue to support the purposive
behavior of an artificial bodyIST - 2001- 33564 - 1 May 2002 – 30 April 2005
Sergio Martinoia (project coordinator)

Neuro-IT workshop – Bonn 22 June, 2004
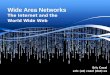
Bi-directional in-vitro Neural interfaces• What is a bi-directional in-vitro neuronal interface?
in - vitro neuronal system “embodied” and “situated”
Bioartificial neuronal networks bioartificial living systems
• Bidirectional neuro-robotic interfaces used as model system for investigating adapitve properties and synaptic plasticity
?
?

Neuro-IT workshop – Bonn 22 June, 2004
In-vitro neuronal networks and MEACortical cells are dissociated from rat embryos (E18) and kept in culture for
weeks (from 7 to 35 Days In Vitro – DIV).
Measurements are carried out in physiological medium: NaCl 150mM, CaCl2 1.3mM, MgCl2 0.7mM, KCl 2.8mM, Glucose 10mM, HEPES buffer 10mM.
Multichannel MEA - 60 TiN electrodes
Neurobit MEA - 60 Pt, Ir or IrOx electrodes

Neuro-IT workshop – Bonn 22 June, 2004
Voltage stimulations and long - term effects

Neuro-IT workshop – Bonn 22 June, 2004
Network stability and plasticity protocolsLEGEND
Test 1Test 2 post tetanus 1 Test 3 post tetanus 2
LEGENDTest 1Test 2Test 3Test 4

Neuro-IT workshop – Bonn 22 June, 2004
New developed MEA devices with cluster
Packaged device

Neuro-IT workshop – Bonn 22 June, 2004
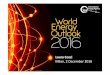
Bi-directional connection and closed-loop experiments
As a closed-loop experiment, we focus on a simple ‘Braitenberg vehicle’ that (learns to) avoid obstacles. The robotic body is a Khepera II, with two wheels and eight infra-red (IR) proximity sensors, which moves inside a circular arena,containing a number of obstacles. Selectivity of population activity to the site of stimulation points to spatial coding of information. Therefore, we defined separate ‘motor’ and ‘sensory’areas. We used two separate sets of recording sites to control the left and right wheels of the robot
CODING
DECODING
--
ROut
LOut
RIn
LIn

Neuro-IT workshop – Bonn 22 June, 2004
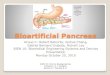
Obstacle avoidance behavior
OutL
OutR
-0 .5 0 0.5 1 1.5 2 2.5 3
x 10-4
-0.5
0
0.5
1
1.5
2
2.5
3x 10
V1
V2
12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
2728
29
30
31
32
-4

Neuro-IT workshop – Bonn 22 June, 2004
PartnersPartners of the of the NeurobitNeurobit projectproject
Jaap van Pelt, Ildiko Vajda,Ger Ramakers, Arjen van Ooyen, Pieter Wolters
Netherlands Institute for Brain Research, KNAW, The Netherlands
KNAWKNAW
Fabrizio Davide, Federico Morabito, Giuliano Stillo, Emiliano Mazzone, Simone Cicero
Telecom Italia Learning Services S.p.A., TILS, ItalyTITI
Sylvie Renaud, Jean Tomas, LudovicAlvado, Thierry Orlandi
IXL Microelectronics Laboratory, ENSEIRB, CNRS, University of Bordeaux, France
IXLIXL
Gwendal Le Masson, André Garenne
The French Institute of Health and Medical Research, INSERM, France
INSERMINSERM
Milena Koudelka-Hep, Luca Berdondini
Institute of Microtechnology, University of Neuchatel, IMT, Switzerland
IMTIMT
Vittorio Sanguineti,Pietro Morasso, Laura Cozzi, Paolo D’Angelo
Department of Computer Science, Systems Engineering and Telematics, DIST, University of Genoa, Italy
UGDISTUGDIST
Sergio Martinoia, Michela Chiappalone,Brunella Tedesco, Laura Bonzano, Antonio Novellino, Alessandro Vato, Marco Bove
Department of Biophysical and Electronic Engineering, DIBE, University of Genoa, Italy
DIBEDIBE