Embed Size (px)
Citation preview

ENGN2502 Lecture 3
The Mathematics of 3D Triangulation

What is a Camera ?

What is a Camera ?
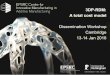
3D Triangulation: Ray-Plane Intersection
ray
plane
intersection point
projector /
coordinate
systems

Representation of Lines and Rays
line
q
v
vqp reference
point
vector
scale parameter
point
q
v
ray=“1/2 line” vqp
parameter is positive

Representation of Planes
2211 vvqp
1v
2vq
p
P
parametric
n
q
p
0)( qpntP
implicit
2 scale parameters
reference point
2 vectors
point
reference point
normal vector
1 implicit equation

Triangulation by Line-Plane Intersection
object being scanned
pqn
}0)(:{ pt qpnpP
projected light plane
p
illuminated point on object
}{ vqpL L
camera ray
Lq
v
intersection of light plane
with object
same
coordinate
system

Triangulation by Line-Line Intersection
object being scanned
}{ 2222 vqpL
camera ray
2q
2v
projected light ray
1q1v
}{ 1111 vqpL
p
lines may not intersect !

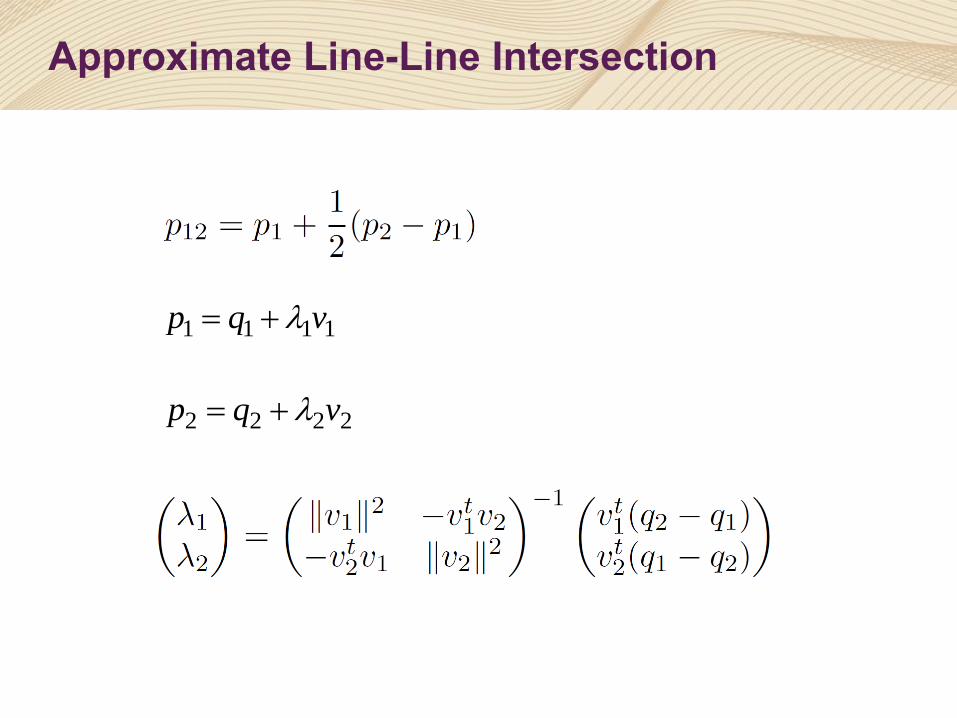
Approximate Line-Line Intersection
1q1v
2q
2v
1111 vqp
2222 vqp
),( 2112 p
Midpoint of segment joining arbitrary points in the two lines
1q1v
2q
2v
),( 2112 p
Least-squares approach
Find parameters which minimize
Approximate Line-Line Intersection
1111 vqp
2222 vqp

Perspective Projection (Pinhole Model)
center of projection
image point
image plane
3D point
light direction for a projector
light direction for a camera
Calibration: mapping from image points to rays

The Ideal Pinhole Camera
camera coordinate system = world coordinate system
1v
3v2v
1
2
1
u
u
u
0q
3
2
1
p
p
p
p
1f

The General Pinhole Model
world coordinate system camera coordinate system
W
C
1 2
31
2 3 u
p
TRXWC
Ideal assumptions • Image lengths = world lengths • Focal length = 1 • Image origin = optical center • Image plane spanned by two basis vectors

The General Pinhole Model
world coordinate system camera coordinate system
W
C
1 2
31
2 3 up
TRXWC

Plane Defined by Image Line and Projection Center
center of projection q
n
image plane
}0)(:{ qpnpP t
}0:{ uluL t
Implicit equation of line in image coordinates