Embed Size (px)
Citation preview

1
The joystick board for the powered wheelchair
Jean-Marc CapronISEN
September 30th 2011University of Kent
Part-financed by the European Regional Development Fund

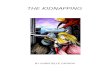
bjoystick
mCATMEL
ATmega328
ADC10 bits
quadDACI2C
tooriginalsystem
mCATMEL
ATmega2560
(ARDUINOor anything else)
SPI
SPIUARTUSBPC
sensor 1
sensor 2
sensor n
joystickmodule
sensorsmodule

bjoystick
mCATMEL
ATmega328
ADC10 bits
quadDACI2C
tooriginalsystem
SPIjoystickmodule
mCATMEL
ATmega2560
SPIUARTUSBPC
sensor 1
sensor 2
sensor nsensorsmodule
actualjoystick’sposition
modifiedjoystick’sposition

joystick module mounted inthe original system

bjoystick
mCATMEL
ATmega328
ADC10 bits
quadDACI2C
tooriginalsystem
SPIjoystickmodule
mCATMEL
ATmega2560
SPIUARTUSBPC
sensor 1
sensor 2
sensor nsensorsmodule
LEDvisual interface
SPI
optocouplers

Sensors used on the prototype:
• Ultrasound sensors
• 9 implemented (only 4 active at one time)
• Advantages: - cheap solution- long range (typ. 20 cm 5 m)
• Drawbacks: - long response time (up to 50 ms)
• Infrared sensors
• 2 implemented (when passing through a door)
• Advantages: - no latency induced
• Drawbacks: - short range (< 1 m)

details (top view)
59 mm
36 m
m
23 m
m
microcontroler

details (bottom view)
quaddigital-to-analog converter
connectionto joystick
connectionto sensorsmodule
connectionto originalsystem

9Part-financed by the
European Regional Development
Fund
Plan of presentationI. Outline of the task within the context of the
projectII. Main resultsIII. Future challenges and the work to be done