-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
The Generalized Projective Riccati Equations Methodand its
Applications to Nonlinear PDEs Describing
Nonlinear Transmission Lines
E.M.E. ZayedDepartment of Mathematics
Zagazig UniversityP.O.Box 44519, Zagazig, Egypt
K.A.E. AlurrfiDepartment of Mathematics
Zagazig UniversityP.O.Box 44519, Zagazig, Egypt
ABSTRACTIn this article, we apply the generalized projective
Riccati equa-tions method with the aid of symbolic computation to
constructnew exact traveling wave solutions with parameters for two
nonlin-ear PDEs describing nonlinear transmission lines (NLTL). The
firstequation describes the model of governing wave propagation in
theNLTL as nonlinear low-pass electrical lines. The second
equationdescribes pulse narrowing nonlinear transmission lines. The
ob-tained solutions include, kink and anti-kink solitons, bell
(bright)and anti-bell (dark) solitary wave solutions, hyperbolic
solutionsand trigonometric solutions. Based on Kirchhoff’s current
law andKirchhoff’s voltage law, the given nonlinear PDEs have been
de-rived and can be reduced to nonlinear ordinary differential
equa-tions (ODEs) using a simple transformation. The given method
inthis article is straightforward and concise, and it can also be
appliedto other nonlinear PDEs in mathematical physics.
KeywordsGeneralized projective Riccati equations method, Exact
solu-tions, Nonlinear low-pass electrical lines, Pulse narrowing
non-linear transmission lines, Kirchhos lawsSS
1. INTRODUCTIONIn the recent years, investigations of exact
solutions to nonlinearPDEs play an important role in the study of
nonlinear physicalphenomena in such as fluid mechanics,
hydrodynamics, optics,plasma physics, solid state physics, biology
and so on. Severalmethods for finding the exact solutions to
nonlinear equations inmathematical physics have been presented,
such as the inversescattering method [1], the Hirota bilinear
transform method [2],the truncated Painlevé expansion method
[3-6], the Bäcklundtransform method [7,8], the exp-function method
[9-11], thetanh-function method [12,13], the Jacobi elliptic
function expan-sion method [14-16], the (G
′
G)-expansion method [17-22], the
modified (G′
G)-expansion method [23], the (G
′
G, 1G)-expansion
method [24-27], the modified simple equation method [28-30],the
multiple exp-function algorithm method [31,32], the trans-formed
rational function method [33], the local fractional seriesexpansion
method [34], the first integral method [35,36],the gen-eralized
Riccati equation mapping method [37,38], the gener-alized
projective Riccati equations method [39-44] and so on.Conte and
Musette [39] presented an indirect method to seekmore solitary wave
solutions of some NPDEs that can be ex-pressed as polynomials in
two elementary functions which sat-isfy a projective Riccati
equation [45]. Using this method, manysolitary wave solutions of
many NPDEs are found [42,45]. Re-cently, Yan [43] developed further
Conte and Musette’s methodby introducing more generalized
projective Riccati equations.The objective of this article is to
use the generalized projectiveRiccati equations method to construct
the exact solutions of thefollowing two nonlinear PDEs:
(1) The nonlineae PDE governing wave propagation in
nonlinearlow-pass electrical transmission lines [46]:
∂2V (x, t)
∂t2− α∂
2V 2(x, t)
∂t2+ β
∂2V 3(x, t)
∂t2
−δ2 ∂2V (x, t)
∂x2− δ
4
12
∂4V (x, t)
∂x4= 0, (1.1)
where α, β and δ are constants, while V (x, t) is the voltagein
the transmission lines. The variable x is interpreted as
thepropagation distance and t is the slow time. The physical
detailsof the derivation of Eq. (1.1) using the Kirchhoff’s laws
aregiven in [46], which are omitted here for simplicity. Note
thatEq. (1.1) has been discussed in [46] using an auxiliary
equationmethod [47] and its exact solutions have been found.
Also,this equation have been studied in [48] using the new
Jacobielliptic function expansion method and its exact traveling
wavesolutions have been obtained.
(2) The nonlinear PDE describing pulse narrowing nonlin-ear
transmission lines [49]:
∂2φ(x, t)
∂t2− 1LC0
∂2φ(x, t)
∂x2− b1
2
∂2φ2(x, t)
∂t2
− δ2
12LC0
∂4φ(x, t)
∂x4= 0, (1.2)
where φ(x, t) is the voltage of the pulse and C0, L, δ and b1
areconstants. The physical details of the derivation of Eq. (1.2)
iselaborated in [49] using the Kirchhoff’s current law and
Kirch-hoff’s voltage law, which are omitted here for simplicity. It
iswell-known [49] that Eq. (1.2) has the solution:
φ(x, t) =3(v2−v20)b1v2
sech2[√
3(v2−v20)v0
((x−vt)δ
)], (1.3)
where v is the propagation velocity of the pulse and v0 =
1√LC0provided v > v0 and LC0 > 0. Recently Zayed and
Alurrfihave discussed Eq. (1.2) in [50] using the new Jacobi
ellipticfunction expansion method and determined its exact
travelingwave solutions.This article is organized as follows: In
Sec. 2, the description ofthe generalized projective Riccati
equations method is given. InSec. 3, we use the given method
described in Sec. 2, to find exactsolutions of Eqs. (1.1) and
(1.2). In Sec. 4, physical explanationsof some results are
presented. In Sec. 5, some conclusions areobtained.
1
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
2. DESCRIPTION OF THE GENERALIZEDPROJECTIVE RICCATI
EQUATIONSMETHOD
Consider a nonlinear PDE in the form
P (u, ux, ut, uxx, utt, ...) = 0, (2.1)
where u = u(x, t) is an unknown function, P is a polynomialin
u(x, t) and its partial derivatives in which the highest
orderderivatives and nonlinear terms are involved. Let us now
givethe main steps of the generalized projective Riccati
equationsmethod [39-44]:
Step 1. We use the following transformation:
u(x, t) = u(ξ), ξ = x− vt, (2.2)
where v is velocity of the propagation , to reduce Eq. (2.1) to
thefollowing nonlinear (ODE):
H(u, u′, u′′, ...) = 0, (2.3)
where H is a polynomial of u(ξ) and its total derivatives
u′(ξ), u′′(ξ), ... and ′ =d
dξ.
Step 2. We suppose that the solution of Eq. (2.3) has
theform:
u(ξ) = A0 +
N∑i=1
σi−1(ξ) [Aiσ(ξ) +Biτ(ξ)] , (2.4)
where A0, Ai and Bi are constants to be determined later.
Thefunctions σ(ξ) and τ(ξ) satisfy the ODEs:
σ′(ξ) = εσ(ξ)τ(ξ), (2.5)
τ ′(ξ) = R+ ετ2(ξ)− µσ(ξ), ε = ±1, (2.6)
where
τ2(ξ) = −ε(R− 2µσ(ξ) + µ
2 + r
Rσ2(ξ)
), (2.7)
where r = ±1 and R, µ are nonzero constants.
If R = µ = 0, Eq. (2.3) has the formal solution:
u(ξ) =
N∑i=0
Aiτi(ξ) (2.8)
where τ(ξ) satisfies the ODE:
τ ′(ξ) = τ2(ξ). (2.9)
Step 3. We determine the positive integer N in (2.4) by usingthe
homogeneous balance between the highest-order derivativesand the
nonlinear terms in Eq. (2.3).
Step 4. Substitute (2.4) along with Eqs. (2.5)-(2.7)
intoEq.(2.3) or ((2.8) along with Eq. (2.9) into Eq. (2.3)).
Collectingall terms of the same order of σj(ξ)τ i(ξ) (j = 0, 1,...;
i = 0, 1)(or τ j(ξ), j = 0, 1, ... ). Setting each coefficient to
zero, yields aset of algebraic equations which can be solved to
find the valuesof A0, Ai, Bi, v, µ and R.
Step 5. It is well known [41,44] that Eqs. (2.5) and (2.6)admits
the following solutions:
Case 1. When ε = −1, r = −1, R > 0,
σ1(ξ) =Rsech(
√Rξ)
µsech(√Rξ)+1
, τ1(ξ) =√R tanh(
√Rξ)
µsech(√Rξ)+1
, (2.10)
Case 2. When ε = −1, r = 1, R > 0,
σ2(ξ) =Rcsch(
√Rξ)
µcsch(√Rξ)+1
, τ2(ξ) =√R coth(
√Rξ)
µcsch(√Rξ)+1
. (2.11)
Case 3. When ε = 1, r = −1, R > 0,
σ3(ξ) =R sec(
√Rξ)
µ sec(√Rξ)+1
, τ3(ξ) =√R tan(
√Rξ)
µ sec(√Rξ)+1
, (2.12)
σ4(ξ) =R csc(
√Rξ)
µ csc(√Rξ)+1
, τ4(ξ) = −√R cot(
√Rξ)
µ csc(√Rξ)+1
. (2.13)
Case 4. when R = µ = 0,
σ5(ξ) =C
ξ, τ5(ξ) =
1
εξ, (2.14)
where C is a nonzero constant.
Step 6. Substituting the values of A0, Ai, Bi, v, µ and Ras well
as the solutions (2.10)-(2.14) into (2.4) we obtain theexact
solutions of Eq. (2.1).
3. EXACT SOLUTIONS OF EQUATIONS (1.1)AND (1.2) USING THE GIVEN
METHOD OFSEC. 2
In this section, we apply the generalized projective Riccati
equa-tions method of Sec. 2 to find families of new exact solutions
ofEqs. (1.1) and (1.2).
3.1 Exact solutions of the nonlinear PDE (1.1)In this
subsection, we find the exact wave solutions of Eq. (1.1).To this
end, we use the transformation
V (x, t) = V (ξ), ξ =√k (x− vt) , (3.1)
to reduce Eq. (1.1) to the following nonlinear ODE:
d2
dξ2
{k2δ4
12d2Vdξ2
+ (kδ2 − kv2)V + αkv2V 2 − βkv2V 3}= 0.
(3.2)
Integrating Eq. (3.2) twice and vanishing the constants
ofintegration, we find the following ODE:
K2
12d2Vdξ2
+ (K − U)V + αUV 2 − βUV 3 = 0. )(3.3)
where K = kδ2 and U = kv2.Balancing d
2Vdξ2
with V 3 gives N = 1. Therefore, (2.4) reducesto
V (ξ) = A0 +A1σ(ξ) +B1τ(ξ), (3.4)
where A0, A1 and B1 are constants to be determined such thatA1
6= 0 or B1 6= 0.Substituting (3.4) and using (2.5)-(2.7) into Eq.
(3.3), the
2
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
left-hand side of Eq. (3.3) becomes a polynomial in σ(ξ)
andτ(ξ). Setting the coefficients of this polynomial to be
zero,yields the following system of algebraic equations:
σ3 : −UβA31 − 1Rε(16K2ε2A1 − 3UβA1B21
)(µ2 + r) = 0,
σ2 : − εR(UαB21 − 3UβA0B21) (µ2 + r)− 112K
2µεA1− 1
12K2µεA1 − 3UβA0A21 = 0,
+UαA21 = 0,
σ2τ : 1Rε(UβB31 − 16K
2ε2B1)(µ2 + r)− 3UβA21B1 = 0,
σ : A1 (K − U)− εR(16K2ε2A1 − 3UβA1B21
)+2εµ (UαB21 − 3UβA0B21)− 3UβA20A1+2UαA0A1 +
112K2RεA1 = 0,
στ : −2µε(UβB31 − 16K
2ε2B1)− 1
4K2µεB1
+2UαA1B1 − 6UβA0A1B1 = 0,
τ : B1 (K − U) +Rε(UβB31 − 16K
2ε2B1)
−3UβA20B1 + 2UαA0B1 + 16K2RεB1 = 0,
σ0 : A0 (K − U)−Rε (UαB21 − 3UβA0B21)+UαA20 − UβA30 = 0.
(3.5)
Case 1. If we substitute ε = −1 into the algebraic
equations(3.5) and solve them by Maple 14, we have the following
results:
Result 1. We have
K = − 24α2(µ2+r)
(−9βµ2+2rα2+2µ2α2)R , U =216α2βµ2(µ2+r)
(−9βµ2+2rα2+2µ2α2)2R ,
A0 = 0, A1 =2α(µ2+r)
3βµR, B1 = 0. (3.6)
From (2.10), (2.11), (3.4) and (3.6), we deduce that if r =
−1,then we have the exact wave solution
V (ξ) = 2α(µ2−1)
3βµR
[Rsech(
√Rξ)
µsech(√Rξ)+1
], (3.7)
whereξ =
√− 24α
2(µ2−1)δ2(−9βµ2−2α2+2µ2α2)Rx−
√216α2βµ2(µ2−1)
(−9βµ2−2α2+2µ2α2)2R t,provided that β(µ2 − 1) > 0 and 9βµ2
> 2α2(µ2 − 1).
while if r = 1, then we have the exact wave solution
V (ξ) = 2α(µ2+1)
3βµR
[Rcsch(
√Rξ)
µcsch(√Rξ)+1
], (3.8)
whereξ =
√− 24α2(µ2+1)δ2(−9βµ2+2α2+2µ2α2)Rx−
√216α2βµ2(µ2+1)
(−9βµ2+2α2+2µ2α2)2R t,provided that β > 0 and 9βµ2 >
2α2(µ2 + 1).
Result 2. We have
K = − 24α2(2α2−9β)R , U =
216α2β(2α2−9β)2R , A0 =
α
3β,
A1 = ±α√µ2+r
βR, B1 = ± α3β√R . (3.9)
In this case, we deduce that if r = −1, then we have the
exactwave solution
V (ξ) = α3β
[1±√µ2−1sech(
√Rξ)+tanh(
√Rξ)
µsech(√Rξ)+1
], (3.10)
while if r = 1, then we have the exact wave solution
V (ξ) = α3β
[1±√µ2+1csch(
√Rξ)+coth(
√Rξ)
µcsch(√Rξ)+1
], (3.11)
whereξ =
√− 24α2δ2(2α2−9β)Rx −
√216α2β
(2α2−9β)2R t, provided that β > 0
and 9β > 2α2.
Case 2. If we substitute ε = 1 and r = −1 into the alge-braic
equations (3.5) and solve them by Maple 14, we have thefollowing
results:
Result 1. We have
K = 24α2(µ2−1)
(−9βµ2−2α2+2µ2α2)R , U = −216α2βµ2(µ2−1)
(−9βµ2−2α2+2µ2α2)2R ,
A0 = 0, A1 =2α(µ2−1)
3βµR, B1 = 0. (3.12)
From (2.12), (2.13), (3.4) and (3.12), we deduce the
followingexact wave solutions
V (ξ) = 2α(µ2−1)
3βµR
[R sec(
√Rξ)
µ sec(√Rξ)+1
], (3.13)
or
V (ξ) = 2α(µ2−1)
3βµR
[R csc(
√Rξ)
µ csc(√Rξ)+1
], (3.14)
whereξ =
√24α2(µ2−1)
δ2(−9βµ2−2α2+2µ2α2)Rx−√− 216α
2βµ2(µ2−1)(−9βµ2−2α2+2µ2α2)2R t,
provided that β(µ2 − 1) < 0 and 9βµ2 > 2α2(µ2 − 1).
3.2 Exact solutions of the nonlinear PDE (1.2)In this
subsection, we find the exact solutions of Eq. (1.2). Tothis end,
we use the transformation (2.2) to reduce Eq. (1.2) tothe following
nonlinear ODE:
φ′′(ξ) + k1φ(ξ) + k2φ2(ξ) = 0, (3.15)
where
k1 = −12(v2−v20)δ2v20
, k2 = 6b1v2
δ2v20. (3.16)
Balancing φ′′ with φ2 gives N = 2. Therefore, (2.4) re-duces
to
φ(ξ) = A0 +A1σ(ξ) +A2σ2(ξ)
+B1τ(ξ) +B2σ(ξ)τ(ξ), (3.17)
where A0, A1 , A2, B1and B2 are constants to be determinedsuch
that A2 6= 0 or B2 6= 0.Substituting (3.17) and using (2.5)-(2.7)
into Eq. (3.15), theleft-hand side of Eq. (3.15) becomes a
polynomial in σ(ξ) andτ(ξ). Setting the coefficients of this
polynomial to be zero,
3
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
yields the following system of algebraic equations:
σ4 : A22k2 − 1Rε (µ2 + r) (6A2ε
2 + k2B22) = 0,
σ3 : 2εµ (6A2ε2 + k2B
22)− 2µεA2 + 2A1A2k2
− εR(µ2 + r) (2A1ε
2 + 2B1B2k2) = 0,
σ3τ : 2A2B2k2 − 6Rε3B2 (µ
2 + r) = 0,
σ2 : k2 (A21 + 2A0A2)− εR (6A2ε2 + k2B22)
+2εµ (2A1ε2 + 2B1B2k2)− εRB
21k2 (µ
2 + r)+A2k1 + 2RεA2 − µεA1 = 0,
σ2τ : ε(12µε2B2 − 2Rε
2B1 (µ2 + r)
)+2k2 (A1B2 +A2B1)− 6µεB2 = 0,
σ : −ε (R (2A1ε2 + 2B1B2k2)− 2µB21k2)+A1k1 +RεA1 + 2A0A1k2 =
0,
στ : B2k1 + ε (4µε2B1 − 6Rε2B2)− 3µεB1
+2k2 (A0B2 +A1B1) + 5RεB2 = 0,
τ : 2RB1ε− 2RB1ε3 +B1k1 + 2A0B1k2 = 0,
σ0 : A20k2+A0k1−RεB21k2 = 0. (3.18)
Case 1. If we substitute ε = −1 into the algebraic
equations(3.18) and solve them by Maple 14, we have the
followingresults:
Result 1. We have
R = −k1, A0 = 0, A1 =3µ
k2, A2 =
3(µ2 + r)
k1k2,
B1 = 0, B2 = ±3
k2
√− (µ
2 + r)
k1, (3.19)
where k1 < 0, µ2 + r > 0.From (2.10), (2.11), (3.17) and
(3.19), we deduce that if r = −1,then we have the exact wave
solution
φ(ξ) = −3k1sech(
√−k1ξ)
(µ+sech(
√−k1ξ)±
√µ2−1 tanh(
√−k1ξ)
)k2(µsech(
√−k1ξ)+1)
2 ,
(3.20)
while if r = 1, then we have the exact wave solution
φ(ξ) = −3k1csch(
√−k1ξ)
(µ−csch(
√−k1ξ)±
õ2+1coth(
√−k1ξ)
)k2(µcsch(
√−k1ξ)+1)
2 ,
(3.21)
Result 2.
A0 = −k1k2, A1 =
3µ
k2, A2 = − 3(µ
2+r)k1k2
,
B1 = 0, B2 = ±3
k2
√(µ2 + r)
k1, R = k1. (3.22)
where k1 > 0, µ2 + r > 0In this case, we deduce that if r
= −1, then we have the exactwave solution
φ(ξ) = − k1k2
(1 +
3sech(√k1ξ)
(−µ−sech(
√k1ξ)±
√µ2−1 tanh(
√k1ξ)
)(µsech(
√k1ξ)+1)
2
),
(3.23)
while if r = 1, then we have the exact wave solution
φ(ξ) = − k1k2
(1 +
3csch(√k1ξ)
(−µ+csch(
√k1ξ)±
õ2+1coth(
√k1ξ)
)(µcsch(
√k1ξ)+1)
2
),
(3.24)
Case 2. If we substitute ε = 1 and r = −1 into the
algebraicequations (3.18) and solve them by Maple 14, we have
thefollowing results:
Result 1. We have
A0 = 0, A1 = −3µ
k2, A2 =
3(µ2 − 1)k1k2
,
B1 = 0, B2 = ±3
k2
√− (µ
2 − 1)k1
, R = k1, (3.25)
where k1 > 0, µ2 − 1 < 0.From (2.10), (2.11), (3.17) and
(3.25), we deduce the followingexact wave solutions
φ(ξ) = −3k1 sec(
√k1ξ)
(µ+sec(
√k1ξ)±
√−(µ2−1) tan(
√k1ξ)
)k2(µ sec(
√k1ξ)+1)
2 ,
(3.26)
or
φ(ξ) = −3k1 csc(
√k1ξ)
(µ+csc(
√k1ξ)±
√−(µ2−1) cot(
√k1ξ)
)k2(µ csc(
√k1ξ)+1)
2 ,
(3.27)
Result 2.
A0 = −k1k2, A1 = −
3µ
k2, A2 = −
3(µ2 − 1)k1k2
,
B1 = 0, B2 = ±3
k2
√(µ2 − 1)k1
, R = −k1. (3.28)
where k1 < 0, µ2 − 1 < 0In this case, we deduce the
following exact wave solutions
φ(ξ) = k1k2
(−1 +
3 sec(√−k1ξ)
(µ+sec(
√−k1ξ)±
√−(µ2−1) tan(
√−k1ξ)
)(µ sec(
√−k1ξ)+1)
2
),
(3.29)
or
φ(ξ) = − k1k2
(1 +
3csc(√−k1ξ)
(−µ−csc(
√−k1ξ)±
√−(µ2−1) cot(
√−k1ξ)
)(µ csc(
√−k1ξ)+1)
2
).
(3.30)
4. PHYSICAL EXPLANATIONS OF SOMERESULTS
Solitary waves can be obtained from each traveling wave
solu-tion by setting particular values to its unknown parameters.
Inthis section, we have presented some graphs of solitary
wavesconstructed by taking suitable values of involved unknown
pa-rameters to visualize the underlying mechanism of the
originalequation. Using mathematical software Maple 14, three
dimen-sional plots of some obtained exact traveling wave solutions
havebeen shown in Figure 1- Figure. 6.
4
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
Fig. 1. The plot of the solution (3.7) when µ = 2, α = 1, δ =
1,β = 2, R = 1.
4.1 The nonlinear PDE (1.1) governing wavepropagation in
nonlinear low-pass electricaltransmission lines
The obtained solutions for the nonlinear PDE (1.1)
incorporatethree types of explicit solutions namely, hyperbolic and
trigono-metric. From these explicit results it is easy to say that
the so-lution (3.7) is a bell-shaped soliton solution; the solution
(3.8)is a singular bell-shaped soliton solution; the solution
(3.10) isa bell-kink shaped soliton solution; the solution (3.11)
is a sin-gular bell-kink shaped soliton solution and the solutions
(3.13),(3.14) are periodic solutions. The graphical representation
of thesolutions (3.7), (3.10) and (3.14) can be plotted as
follows:
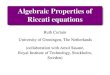
4.2 The nonlinear PDE (1.2) describing pulsenarrowing nonlinear
transmission lines
The obtained solutions for the nonlinear PDE (1.2) are
hyper-bolic and trigonometric. From the obtained solutions for
thisequation we observe that the solutions (3.20), (3.23) are
bell-kinkshaped soliton solutions; the solutions (3.21), (3.24) are
singularbell-kink shaped soliton solutions and the solutions
(3.26)-(3.30)are periodic solutions. The graphical representation
of the solu-tions (3.21), (3.23) and (3.29) can be plotted as
follows:
5. CONCLUSIONSThe generalized projective Riccati equations
method describedin Section 2 of this article has been applied to
construct manynew exact solutions of the nonlinear PDEs (1.1) and
(1.2) whichdescribe the nonlinear low-pass electrical transmission
lines andpulse narrowing nonlinear transmission lines respectively,
withthe aid of Maple 14. On comparing our results obtained in
thisarticle with the well-known results obtained in [46,48,49,50]
we
Fig. 2. The plot of the solution (3.10) when µ = 2, α = 1, δ =
2,β = 1, R = 2.
deduce that our results are new and not published elsewhere.
Theproposed method of this paper is effective and can be appliedto
many other nonlinear PDEs. Finally, all solutions obtained inthis
article have been checked with the Maple 14 by putting themback
into the original equations.
AcknowledgementThe authors wish to thank the referees for their
comments on thepaper.
6. REFERENCES[1] M. J. Ablowitz and P. A. Clarkson, Solitons,
Nonlin-
ear Evolution Equations and Inverse Scattering
Transform,Cambridge University Press, New York, NY,USA, 1991.
[2] R. Hirota, Exact solutions of the KdV equation for
multiplecollisions of solutions, Phys. Rev. Lett., 27(1971)
1192–1194.
[3] J.Weiss, M. Tabor, and G. Carnevale, The Painlevé
propertyfor partial differential equations, J. Math. Phys.,
24(1983)522–526.
[4] N. A. Kudryashov, Exact soliton solutions of a general-ized
evolution equation of wave dynamics, J. Appl. Math.Mech., 52(1988)
361–365.
[5] N. A. Kudryashov, Exact solutions of the
generalizedKuramoto-Sivashinsky equation, Phys. Lett. A, 147
(1990)287–291.
5
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
Fig. 3. The plot of the solution (3.14) when µ = 2, α = 1, δ =
2,β = −1, R = 2.
[6] N. A. Kudryashov, On types of nonlinear
nonintegrableequations with exact solutions, Phys. Lett. A, 155
(1991)269–275.
[7] M. R. Miura, Bäcklund Transformation, Springer,
Berlin,Germany, 1978.
[8] C. Rogers and W. F. Shadwick, Bäcklund Transformationsand
Their Applications, Academic Press, New York, NY,USA, 1982.
[9] J.-H. He and X.-H. Wu, Exp-function method for nonlinearwave
equations, Chaos, Solitons and Fractals, 30 (2006)700–708.
[10] E. Yusufoglu, New solitary for the MBBM equations
usingExp-function method, Phys. Lett A, 372 (2008) 442–446.
[11] S. Zhang, Application of Exp-function method to
high-dimensional nonlinear evolution equations, Chaos, Solitonsand
Fractals, 38 (2008) 270–276.
[12] E. G. Fan, Extended tanh-function method and its
appli-cations to nonlinear equations, Phys. Lett. A, 277
(2000)212–218.
[13] S. Zhang and T. C. Xia, A further improved
tanh-functionmethod exactly solving the (2+1)-dimensional
dispersivelong wave equations, Appl. Math. E-Notes, 8 (2008)
58–66.
[14] Y. Chen and Q. Wang, Extended Jacobi elliptic
functionrational expansion method and abundant families of Ja-
Fig. 4. The plot of solution (3.21) when v = 2, µ = 1, k1 =
−9,k2 = 6.
cobi elliptic function solutions to (1+1)-dimensional
dis-persive long wave equation, Chaos, Solitons and Fractals,24
(2005) 745–757.
[15] S. Liu, Z. Fu, S. Liu, and Q. Zhao, Jacobi elliptic
functionexpansion method and periodic wave solutions of
nonlinearwave equations, Phys. Lett. A, 289 (2001) 69–74.
[16] D. Lu, Jacobi elliptic function solutions for two
variantBoussinesq equations, Chaos, Solitons and Fractals, 24(2005)
1373–1385.
[17] E. M. E. Zayed, New traveling wave solutions for
higherdimensional nonlinear evolution equations using a
gener-alized (G
G
′)-expansion method, J. Phys. A: Math. Theor.,
42(2009) 195202, 13 pages
[18] M. L. Wang, X. Li, and J. Zhang, The (GG
′)-expansion
method and travelling wave solutions of nonlinear evolu-tion
equations in mathematical physics, Phys. Lett. A, 372(2008)
417–423.
[19] S. Zhang, J. L. Tong, andW.Wang, A generalized (GG
′)-
expansion method for the mKdV equation with variable
co-efficients, Phys. Lett. A, 372 (2008) 2254–2257.
[20] E. M. E. Zayed and K. A. Gepreel, The (GG
′)-expansion
method for finding traveling wave solutions of nonlinearpartial
differential equations in mathematical physics, J.Math. Phys., 50
(2009) 013502-013512.
[21] N. A. Kudryashov, A note on the (GG
′)-expansion method,
Appl. Math. Comput., 217 (2010) 1755–1758.
6
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
Fig. 5. The plot of solution (3.23) when v = 1, µ = −1, k1 = 323
,k2 =
23 .
[22] E. M. E. Zayed, Traveling wave solutions for higher
di-mensional nonlinear evolution equations using the (G
G
′)-
expansion method, J. Appl. Math. Informatics, 28
(2010)383-395.
[23] S. Zhang, Y. N. SUN, J. M. B and L.Dong, The
modified(GG
′)-expansion method for nonlinear evolution equations,
Z. Naturforsch., 66a (2011) 33-39.[24] L.x. Li, Q. E. Li, and L.
M Wang, The (G
G
′, 1G)-expansion
method and its application to traveling wave solutions ofthe
Zakharov equations, Appl Math J. Chinese. Uni., 25(2010)
454–462.
[25] E. M. E. Zayed and M. A. M. Abdelaziz, The two vari-ables
(G
G
′, 1G)-expansion method for solving the nonlinear
KdV-mKdV equation, Math. Prob. Engineering, Vol. 2012,Article ID
725061, 14 pages.
[26] E. M. E. Zayed and K. A. E. Alurrfi, The (GG
′, 1G)-
expansion method and its applications to find the exact
so-lutions of nonlinear PDEs for nanobiosciences, Math.
Prob.Engineering, Vol. 2014, Article ID 521712, 10 pages.
[27] E. M. E. Zayed and K. A. E. Alurrfi, The (GG
′, 1G)-
expansion method and its applications for solving twohigher
order nonlinear evolution equations, Math. Prob.Engineering, Vol.
2014, Article ID 746538, 21 pages.
[28] A. J. M. Jawad, M. D. Petkovic and A. Biswas,
Modifiedsimple equation method for nonlinear evolution
equations,Appl. Math. Comput., 217 (2010) 869-877.
Fig. 6. The plot of solution (3.29) when v = 2, µ = 12 , k1 =
−9,k2 = 12.
[29] E. M. E. Zayed, A note on the modified simple
equationmethod applied to Sharma-Tasso-Olver equation. Appl.Math.
Comput., 218 (2011) 3962-3964.
[30] E. M. E. Zayed and S. A. Hoda Ibrahim, Exact solutionsof
nonlinear evolution equations in mathematical physicsusing the
modified simple equation method, Chin. Phys.Lett., 29 (2012),
060201-060204.
[31] W. X. Ma and Z. Zhu, Solving the
(3+1)-dimensionalgeneralized KP and BKP equations by the multiple
exp-function algorithm, Appl. Math. Comput., 218
(2012)11871-11879.
[32] W. X. Ma, T.Huang and Y.Zhang, A multiple
exp-functionmethod for nonlinear differential equations and its
applica-tion, Phys. Script.,82(2010) 065003.
[33] W. X. Ma and J. H. Lee, A transformed rational func-tion
method and exact solutions to the (3+1) dimensionalJimbo-Miwa
equation, Chaos, Solitons and Fractals, 42(2009) 1356-1363.
[34] A. M. Yang, X. J. Yang, and Z. B. Li, Local fractional
seriesexpansion method for solving wave and diffusion equationson
cantor sets, Abst. Appl. Analy., Vol. 2013, Article ID351057, 5
pages.
[35] N. Taghizadeh, M. Mirzazadeh, F. Farahrooz, Exact
solu-tions of the nonlinear Schrödinger equation by the first
in-tegral method, J. Math Anal Appl., 374 (2011) 549-553.
[36] B. H. Q. Lu, H. Q. Zhang and F. D. Xie, Traveling
wavesolutions of nonlinear parial differential equations by
using
7
-
Communications on Applied Electronics (CAE) - ISSN : 2394 -
4714Foundation of Computer Science FCS, New York, USAVolume 3 - No.
4, November 2015 - www.caeaccess.org
the first integral method, Appl. Math. Comput., 216
(2010)1329-1336.
[37] E. M. E. Zayed, Y. A. Amer and R. M. A. Shohib,The
im-proved Riccati equation mapping method for constructingmany
families of exact solutions for a nonlinear partial dif-ferential
equation of nanobiosciences, Int. J. Phys. Sci., 8(2013)
1246-1255.
[38] S. D. Zhu, The generalized Riccati equations map-ping
method in nonlinear evolution equation: applica-tion to
(2+1)-dimensional Boiti-Lion-Pempinelle equation,Chaos, Solitons
and Fractals, 37 (2008) 1335-1342.
[39] R. Conte and M. Musette, Link between solitary waves
andprojective Riccati equations, Phys. A: Math. Cen. 25
(1992)2609-2623.
[40] E. M. E. Zayed and K. A. E. Alurrfi, The
generalizedprojective Riccati equations method for solving
nonlinearevolution equations in mathematical physics, Abst.
Appl.Analy., Vol. 2014, Article ID 259190, 10 pages.
[41] E. M. E. Zayed and K. A. E. Alurrfi, The generalized
pro-jective Riccati equations method and its applications
forsolving two nonlinear PDEs describing microtubules, Int.J. Phys.
Sci., 10 (2015) 391-402.
[42] G. X. Zhang, Z. B. Li and Y. S. Duan, Exact solitary
wavesolutions of nonlinear wave equations, Science in China A.,44
(2001), pp. 396-401.
[43] Z.Y. Yan, Generalized method and its application in
thehigher-order nonlinear Schrodinger equation in nonlinearoptical
fibres, Chaos, Solitons Fractals, 16 (2003) 759-766.
[44] E.Yomba, The General projective Riccati equations methodand
exact solutions for a class of nonlinear partial differen-tial
equations, Chin. J. Phys., 43 (2005) 991-1003.
[45] T. C. Bountis, V. Papageorgiou, and P. Winternitz, On
theintegrability of systems of nonlinear ordinary
differentialequations with superposition principles, J. Math.
Phys., 27(1986), 1215-1224.
[46] S. Abdoulkary, T. Beda, O. Dafounamssou, E. W. Tafo andA.
Mohamadou, Dynamics of solitary pulses in the nonlin-ear low-pass
electrical transmission lines through the auxil-iary equation
method, J. Mod. Phys. Appl., 2 (2013) 69-87.
[47] Sirendaoreji, Exact traveling wave solutions for four
formsof nonlinear Klein–Gordon equations, Phys. Lett. A, 363(2007)
440-447.
[48] E. M. E. Zayed and K. A. E. Alurrfi, A new Jacobi ellip-tic
function expansion method for solving a nonlinear PDEdescribing the
nonlinear low-pass electrical lines, Chaos,Solitons and Fractals,
(in press).
[49] E. Afshari and A. Hajimiri, Nonlinear transmission linesfor
pulse shaping in Silicon, IEEE J. Solid state circuits, 40(2005)
744-752.
[50] E. M. E. Zayed and K. A. E. Alurrfi, A new Jacobi ellip-tic
function expansion method for solving a nonlinear PDEdescribing
pulse narrowing nonlinear transmission lines, J.Partial Diff. Eqs.,
28 (2015) 128-138.
8
IntroductionDescription of the generalized projective Riccati
equations methodExact solutions of equations (1.1) and (1.2) using
the given method of Sec. 2Exact solutions of the nonlinear PDE
(1.1)Exact solutions of the nonlinear PDE (1.2)
Physical explanations of some resultsThe nonlinear PDE (1.1)
governing wave propagation in nonlinear low-pass electrical
transmission linesThe nonlinear PDE (1.2) describing pulse
narrowing nonlinear transmission lines
ConclusionsReferences